session 27 2 christian larsson
TRANSCRIPT

© Ricardo plc 2009 SARTRE_W_XXX_CC
SARTRE
Safe Road Train for the Environment
En Projektpresentation

2 Transportforum Linköping 2013
Video from On Road tests in Spain,
May 2012
The video was recorded during the actual test on a public highway, open to other traffic
Also available on youtube at Volvo Trucks channel
Link to Video

3 Transportforum Linköping 2013
Projektöverblick
Projektet har koordinerats av Ricardo UK med svenskt
deltagande från Volvo, Volvo Personvagnar och SP.
Projektbudget ~6.4M€ totalt, varav ~60% EU funding.
Projektidé
– SARTRE har utvecklat en platoon som leds av ett
kommersiellt fordon (en Volvolastbil) samt följs av
ytterligare en lastbil samt tre Volvo personbilar.
– Att förare i ledafordonet är en professionell förare
med speciell utbildning är en viktig del av projektets
idé.
– Alla följarfordon följer med efter ledaren med fullt
automatiserad styrning, gas och broms.
Projektmål
– Reducera påverkan på miljön
• genom reducerad bränsleförbrukning.
– Reducera trängsel på vägarna
• Genom att använda tillgänglig väg på ett
effektivare sätt.
– Samma eller ökad trafiksäkerhet
• Systemet skall vara lika eller säkrare än befintliga
transporter. Det sker med hjälp av både teknologi
och utnyttjande av utbildade förare.

4 Transportforum Linköping 2013
Definition av en platoon
Platoon
– A platoon ett antal fordon som framförs tillsammans och är elektroniskt
sammankopplade med trådlös kommunikation.
Fordonsdefinitioner
– Ett Ledarfordon: en lastbil eller en buss.
– Ett eller flera Följarfordon: fordon (personbil, lastbil eller buss)

5 Transportforum Linköping 2013
Platoonen
Ledarfordonet kör manuellt av en professionell förare med speciell
utbildning för att leda en platoon.
Följarfordonen följer autonomt efter och föraren kan arbeta, läsa en bok
eller se en film och på samma gång spara bränsle.

6 Transportforum Linköping 2013
Att koppla på sig på Platoonen
Föraren av följarbilen anger önskad
destination och leds fram till närmsta
platoon med hjälp av ett
navigationssystem.
Följarbilen kopplas på till tåget i en
process där fordonet stegvis tar över
kontrollen över körningen.
LV
Other Vehicle Tries to Enter Platoon
Car Joins Platoon
Car Joins Platoon From Rear
7 Transportforum Linköping 2013
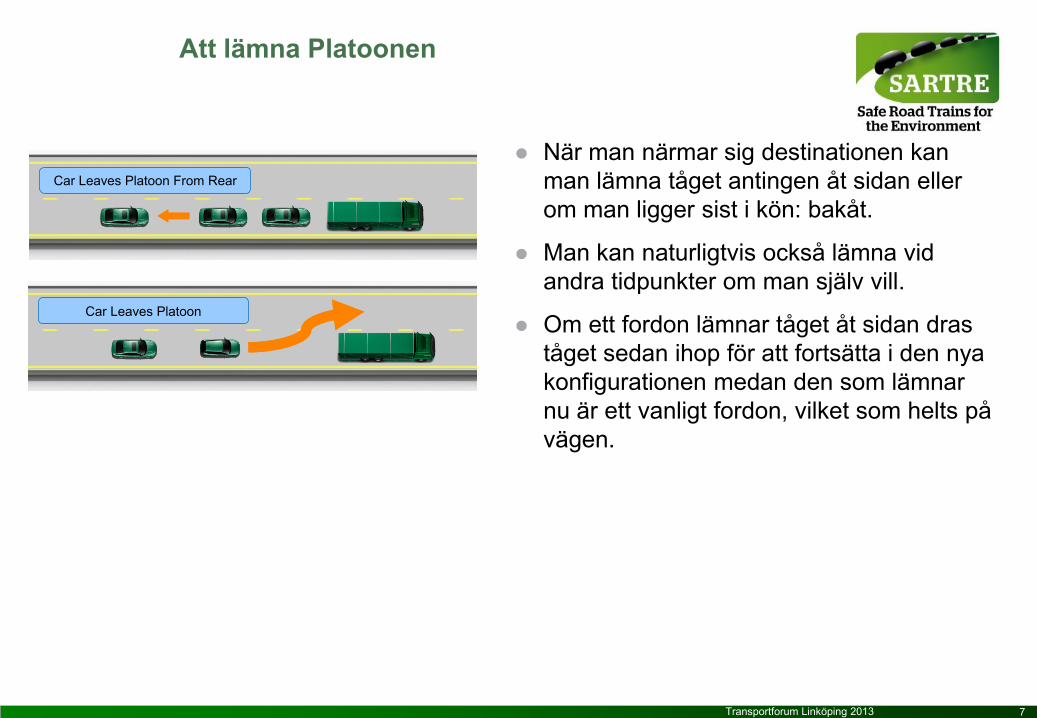
Att lämna Platoonen
När man närmar sig destinationen kan
man lämna tåget antingen åt sidan eller
om man ligger sist i kön: bakåt.
Man kan naturligtvis också lämna vid
andra tidpunkter om man själv vill.
Om ett fordon lämnar tåget åt sidan dras
tåget sedan ihop för att fortsätta i den nya
konfigurationen medan den som lämnar
nu är ett vanligt fordon, vilket som helts på
vägen.
Car Leaves Platoon
Car Leaves Platoon From Rear

8 Transportforum Linköping 2013
Den säkra Föraren av Ledarfordonet
Ledarfordonet skall köras av en professionell förare som har speciell träning i att
var ledare i en platoon.
Ledarförare skall dessutom ha stöd av
teknologi för att köra på säkrats möjliga
sätt. I projektet har vi använt följande:
– Alcolock
– Färdskrivare – som dessutom verifierar att föraren har behörighet att vara ledare.
– Adaptive cruise control
– Driver Alert Support – Varnar föraren om han börjar bli trött eller okoncentrad.
– Lane Keeping Support – Hjälper föraren att hålla sig i filen.
Ledarfordonets förare är en mycket viktig för att hela platoonen framförs på ett säkert
och bränsleeffektivt sätt. Det är därför det krävs en professionell förare med speciell
utbildning.
9 Transportforum Linköping 2013
Teknologier
Ett av målen med projektet var att det huvudsakligen skulle baseras på befintlig
teknologi som kombineras på nya sätt. Många av komponenterna som använts finns
redan idag i produktionsfordon.
Aktuatorer
– Automatisk styrning – funktioner som redan finns i personbilen för körstödssystem
har använts. För lastbilen existerar inga lösningar idag, ett prototypsystem för
forskningsprojekt har använts.
– Kontroll av gas och broms – Samma funktioner som redan idag ändvänds till
radarbaserad farthållare (ACC) som finns implementerad I både bilar och lastbilar
har använts.
Sensorer
– I huvudsak sensorer som redan finns I produktion har kombinats I en sensor fusion
process för att optimera prestandan till kraven har använts.
Kommunikation
– Kortdistanskommunikation baserad på 802.11p speciellt utvecklad av SP inom
projektet pga. speciell krav.
– Långdistanskommunikation baserad på vanlig 3G teknik..

10 Transportforum Linköping 2013
Hur tekniken fungerar

11 Transportforum Linköping 2013
Hur tekniken fungerar - Lateral styrning

12 Transportforum Linköping 2013
Utvärdering

13 Transportforum Linköping 2013
Provning under projektets gång
System har testats kontinuerligt under utvecklingens
gång.
en HMI simulator användes tidigt i projektet
– Användarens upplevelse av att vara så nära
framförvarande fordon under körning.
– Funktionen i gränssnittet för den pekdisplay som
använts som HMI.
Use Cases som utvecklats har till stora delar provats
genom manövertest på Volvos testbana Hällered.

14 Transportforum Linköping 2013
SARTRE – Bränslebesparing
IDAIDA har utfört datorsimuleringar som
visat på stora positiva effekter på
luftsmotståndet, något som sedan till
stora delar kunna verifierats med
testkörningar.
Provning av bränsleförbrukning utfördes
på IDIADAs testbana söder om
Barcelona i Spainen.
Tester utförds nattetid för att garantera
stabila temperatur- och vindförhållanden

15 Transportforum Linköping 2013
SARTRE – Resultat av bränsleförbrukningsmätning
Data samlades in i alla testfordon genom att logga befintliga fordonssignaler.
Signalerna analyserades sedan av IDIADA.
Av tekniska orsaker finns inte mätningar för kortare följeavstånd än 8m för personbilarna.
0
2
4
6
8
10
12
14
16
18
5 6 7 8 9 10 11 12 13 14 15
% F
UEL
SA
VIN
G
GAP (m)
% FUEL SAVING FULL PLATOON
LV Truck
FV Truck
FV Car 1
FV Car 2
FV Car 3

16 Transportforum Linköping 2013
Hur upplevs det att köra i platoon
I projektet har det inte gjorts några koordinerade tester med externa testpersoner då
fokus varit att ta fram det tekniska systemet. Detta är en samling intryck som vi som vi
sett från utvecklare, testförare och sådana som fått testköra vid olika demonstrationer
haft.
De flesta som fått prova på att köra systemet har haft en ganska lika upplevelse av att
köra i platoon.
– Den först fasen, ca 10 minuter känns det lite obehagligt att lita på att bilen kör helt
själv och att man ligger relativt nära fordonet framför. För den som är ny att köra har
vi alltid startat med relativt långa följeavstånd, 15m. Att släppa ratten första gången
är obehagligt för alla.
– När man sedan märker att det fungerar som förväntat slappnar man av mer och
upplever det som en komfortfunktion. Det känns som fordonen är mekaniskt
sammankopplade.
– Efter att ha kört en längre tid känns 6m följeavstånd inte som dramatiskt. Som
utvecklare har man ibland fått påminna sig om att man sitter i en provbil som måste
övervakas.
Att vara ledare är som att köra vanlig lastbil men man måste planera körning ännu mer
eftersom man ansvarar för både komfort och säkerhet för alla i platoonen.

17 Transportforum Linköping 2013
Tack!
Kontaktperson för frågor:
Andreas Ekfjorden, Projektledare Volvo trucks
http://www.sartre-project.eu/
18 Transportforum Linköping 2013