simulation of railway rolling noise emission:...
TRANSCRIPT

Simulation of railway rolling noise emission: determination of the average wheel roughness of a vehicle
G. Desanghere1, B. Stallaert
2, H. Masoumi
2
1 Akron
Mechelsevest 18/0301, B-3000, Leuven, Belgium,
2 D2S international
Jules Vandenbemptlaan 71, B-3001, Heverlee, Belgium
e-mail: [email protected]
Abstract Noise mitigation systems for reducing the railway noise level, especially in urban areas, have received
considerable attention in recent years and were the subject of several research programs. One of the most
important sources of railway noise is rolling noise. Rolling noise is caused by the vibrations of the wheel
and track structures, generated by the dynamic interaction at the wheel-rail contact area due to the
irregularities in the wheel and the rail surfaces.
The European project Quiet-Track investigates track based noise mitigation systems and maintenance
schemes and provides improved TSI based rolling noise calculation procedures. Since the irregularities at
the wheel-rail contact are the excitation mechanism for the rolling noise, both the wheel and rail roughness
are important input parameters for rolling noise calculation models.
Both rail and wheel roughness can be determined experimentally using dedicated measurement devices.
Rail roughness can be easily measured at a specific location and there is a clear relation between the rail
roughness and the measured noise level at a given distance from the track. The situation however is less
obvious when it comes to wheel roughness. Firstly, it is practically not feasible to measure the wheel
roughness of all wheels of all passing vehicles. Secondly, since multiple wheels may contribute to the
measured noise at a given distance from the track, the relation between the roughness of an individual
wheel and the measured noise is not trivial.
Therefore, this paper presents an inverse method to determine the average wheel roughness in terms of
pass-by noise measurements and the dynamic characteristics of the vehicle and the track. The paper
presents the software that is used to predict the rolling noise based on known input parameters and
proposes the inverse calculation method. The results are experimentally validated with pass-by
measurements on tangent ballast track types and with different vehicles.
1 Introduction
The biggest part of the noise generated by light metros and passenger trains, which are generally running
at low to medium speed (30 - 100 km/h) is due to the rolling contact between the vehicle and the track.
Named as the rolling noise, it disturbs people and often causes complaints in urban areas. This is the
reason why ways of controlling rolling noise have received considerable attention in recent years, [1, 2].
In the absence of discontinuities on rails and wheels such as rail joints and wheel flats, wheel/rail rolling
noise dominates on tangent track and is caused by the wheel and rail vibrations generated by the small-
scale roughness on the running surfaces of the wheel and the rail, [1]. Therefore, the quality of the track
3459

and wheel contact surface is expected to be the main issue for controlling rolling noise. In fact, the level of
rolling noise strongly depends on the train speed and the wheel/rail roughness.
In practice, different measurement techniques are used for monitoring the wheel/rail roughness. In a direct
way, for instance trolley-based devices are employed for rail roughness measurements in a network. The
wheel roughness however, is measured by a special device in the workshop.
Since it is practically not feasible to measure the wheel roughness of all wheels of all passing vehicles and
since multiple wheels may contribute to the measured noise at a given distance from the track, making the
relation between the roughness of an individual wheel and the measured noise far from trivial, this project
aims to determine the average wheel roughness in terms of the noise level measured along the railway
tracks.
An inverse computation technique was developed to evaluate the wheel roughness using the measured
sound pressure at receivers in an array of microphones along the tracks. The track-vehicle interaction
parameters such as the rail and the wheel receptances, the track decay rate (TDR), and the rail roughness
are the other parameters needed for the inverse computation.
For this purpose, the software WRNOISE that is actually used for prediction of railway rolling noise
emissions was considerably improved and modified. It is planned to employ this program first, to
determine the rolling noise emitted due to unit combined rail/wheel roughness, and then, to determine the
average wheel roughness based on the measured rail roughness as well as the measured sound pressure
level at 7.5 m from the track.
The first version of WRNOISE was based on Remington’s formula [1]. Although, this version shows a
reasonable agreement with the measurements, in order to be compatible with the purposes of the QUIET-
TRACK project, some improvements in the wheel/rail interaction model, the radiation coefficient for the
wheel, and the directivity effect were implemented.
Before using the software for the prediction of the average wheel roughness, a validation procedure was
followed to demonstrate the reasonable agreement between the results of the field measurements and those
obtained with the new version of the WRNOISE software.
A reference site in Gent (BE) was selected for the validation where tramway vehicles (type Hermelijn
6300) of De Lijn are running on a ballasted tangent track. The field tests include measurements of pass-by
noise and a complete dynamic characterization of the track and the wheel behaviour.
2 Rolling noise prediction
A numerical modeling for the prediction of rolling noise emission is introduced. The model assumes that
the small-scale roughness on the running surfaces of the wheel and rail is the primary mechanism for the
vibration generation. The wheel and rail roughness are measured in the field and are employed as the input
for the computation model.
The wheel roughness is naturally periodic with respect to the wheel circumference, whereas the rail
roughness has a random nature. Since the rail and the wheel irregularities are uncorrelated, the combined
rail/wheel irregularities can be reasonably obtained by the superposition of their spectra. In the combined
value, generally, the wheel roughness values are dominant for the case of freight trains where block or
cast-iron brakes are used. In the case of passenger trains where disc brakes are used, the rail roughness
values are mostly dominant.
It should be mentioned that the induced wheel/rail vibrations predicted by the numerical model are only
valid in a certain frequency band. This frequency band depends on the train speed and the minimum and
maximum measurable and perceptible roughness on the contact surface, which in turn is based on the
limitations of the roughness measurement device(s) and the wheel/rail contact condition.
Applying the combined wheel/rail roughness at the contact point, the rail and wheel vibrations are
obtained in terms of the rail and the wheel dynamic characteristics by introducing an interaction model at
the contact point. This interaction model uses the compatibility of the displacement and the equilibrium of
3460 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

forces to calculate the contact force as well as the wheel and rail response at the contact point. Then, the
average vibration of the wheel and the track components (rail and sleeper) are calculated based on the
wheel/rail contact responses as well as the receptance functions.
Finally, a vibro-acoustic model is introduced for the determination of the noise emission at a certain
distance from the track, based on the vibrations of the wheels and the track components.
2.1 Track-vehicle dynamic interaction
First, the rail and the wheel vibration levels due to passage of a train are investigated. The dynamic
interaction between the running wheel and the rail results in the train (contact) force at the wheel/rail
contact point that depends on the track and the vehicle receptances, the irregularities on the rail and the
wheel contact surfaces, and the train speed.
The evaluation of the dynamic axle load is based on an assumption of a perfect contact between the train
wheel and the rail. To simplify the vehicle interaction, the dynamic system of the vehicle is reduced to the
wheelset system, [3].
Figure 1: Scheme of wheel-rail interaction
It the following, x-direction is defined along the track, y-direction refers to the horizontal direction
perpendicular to the railway, and z-direction is the vertical direction perpendicular to the track.
Figure 1 shows the scheme of the wheel-rail interaction, where the solid lines represent irregularities on
the rail and wheel surfaces, and the dashed lines show the reference position of the rail and the wheel.
In the presence of rail/wheel roughness, the compatibility of the displacement for each axle at the contact
point results in:
( ) ( ) ( ) ( ) (1)
where ( ) is the displacement of the train axle, ( ) denotes to the rail displacement, ( )
represents the combined wheel/rail roughness, and ( ) is the relative displacement across the contact
spring.
Assuming a longitudinally invariant track, the rail displacement at the contact point can be computed from
the dynamic axle loads as follows:
( ) ( ) ( ) (2)
where ( ) is ( ) vector that collects the rail displacements at all axles in y- and z-direction, the
vector ( ) collects dynamic load components, and ( ) is the ( ) rail compliance
matrix.
y
z
x
x
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3461

In a similar way, the wheel displacement is obtained in terms of the vehicle compliance matrix ( ) and
the axle load ( ):
( ) ( ) ( ) (3)
At low frequencies, the vehicle‘s primary and secondary suspension isolate the car-body and the bogie
from the wheelset and then the radial vehicle compliance matrix is a diagonal matrix of the wheel
compliance that only takes into account the inertia of the unsprung mass of the train axles. At higher
frequencies (around 500 Hz), an anti-resonance occurs and above this frequency the compliance is
controlled by the stiffness, rising to a first peak at around 2 kHz.
The axial wheel compliance is dominated by peaks associated with the zero-nodal-circle axial modes, [2].
The displacement vector ( ) is defined in terms of the Hertzian contact stiffness as:
( ) ( ) ( ) (4)
Substituting the equations (2), (3) and (4) in the equation (1), the contact force in terms of the rail/wheel
roughness is obtained as follows:
( ) ⁄( ) ( ) (5)
where ⁄( ) collects the combined wheel/rail roughness at all axles and ( ) ( ) ( )
is the combined compliance of the rail-wheel system.
The inverse matrix of the combined rail and the vehicle compliance can be considered as the dynamic
stiffness of the coupled vehicle-rail system.
The rail and the wheel roughness are generally modelled as a stationary Gaussian random process,
characterized by its one-sided power spectral density (PSD) function in the wavelength domain ( )
[m²/m]. When a wavelength , in [m], is travelled at a speed , in [m/s], the associated excitation
frequency (in [Hz]) is obtained by . According to Parseval’s theorem, the rail/wheel roughness in
frequency domain ( ) [m²/(rad/s)] can be written in terms of ( ) and the train speed as:
( ) ( ) .
Therefore, the cross-PSD matrix ( ) of all axle loads can be presented in terms of the rail/wheel
compliance and roughness, [3], as follows:
( ) {[ ( ) ]
( )
( )[ ( )]
} ( ) (6)
where ( ) is a ( ) vector that collects the phase shift for each axle and the superscript H
denotes the Hermitian or conjugate transpose of a matrix.
Generally, the combined rail/wheel roughness only has a vertical component (in z-direction), therefore the
vector ( ) can be written as:
( ) { (
) }
(7)
where (with ) denotes to the axle’s position.
According to the effect of contact condition, the roughness wavelengths shorter than the contact patch area
dimension are not completely felt by the rail and the wheel. This effect acts as a high pass filter in the
wavelength domain and is represented by the so-called contact patch filter. Therefore, the real combined
wheel/rail roughness is obtained after filtering with a contact patch filter.
Remington et al. [1] have proposed a mathematical form for the derivation of the characteristics of the
contact patch filter. He showed that for a circular contact patch of radius ”a”, the filter transfer function
can be given by:
| ( )|
( ) ∫
( )
(8)
3462 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

where is the wavenumber along the length of the rail or around the circumference of the wheel,
is a constant value determining the degree of the correlation between the parallel roughness profiles at a
given wavenumber, is the Bessel function, is a variable, and “a” is the contact path radius.
It can be seen that a large implies poor correlation and a small implies strong correlation. Although it
is unclear what value of should be used, it was shown that gives a reasonable agreement
with the measurements reported by Remington [1], and Thompson [2]. In the following equations, the
rail/wheel roughness ( ) refers to the filtered roughness as: ( ) | ( )| ( ).
Substituting the dynamic load equation (6) in the equations (2) and (3), the cross-PSD matrix of the rail
and wheel displacements at the contact points are presented as:
( ) {[ ( ) ( ) ]
( ) ( )[ ( ) ( )]
} ( ) (9)
and,
( ) {[ ( ) ( )]
( ) ( )[ ( ) ( )]
} ( ) (10)
where the superscript “pc” denotes the “Point of Contact”.
The above equations can be reformulated as:
( )
( ) (11)
and,
( )
( ) (12)
where {[ ( ) ( ) ] ( )} and {[ ( ) ( ) ]
( )} are vectors of
( ), and ( ) and
( ) are matrices of ( ). The diagonal components of these
matrices represent the PSD of the rail or wheel displacement at the contact points.
The rail and the vehicle compliance matrices are obtained by dynamic testing of the track in the field and
the wheel in the workshop.
The rail vibration model as an infinite vibrating beam under a moving contact force can be introduced as
several incoherent oscillating spheres (monopoles), [4]. The rail vibration at a certain distance from the
contact point (along the track direction) is simplified by an attenuation function in terms of the rail
vibration at the contact point as: ( ) ( ) , where ( ) is the rail loss factor and
√ denotes to the rail wavenumber as a function of the frequency “ ”, the radius of gyration “ ” for the bending in vertical plane and the longitudinal wave velocity “ “ in the rail.
To have just one representative value for the rail response, Remington [1], has proposed an averaged rail
response by transient and spatial averaging of the rail vibrations ( ) in terms of the rail response at
the contact point, the train velocity (V) and the rail decay rate ratio:
( )
( )
( ) (13)
where the averaged response function
( ) is determined as:
( ) [ ] (14)
where T is the measurement time interval that is slightly longer than the pass-by time and the frequency
dependent loss factor ( ) is defined as:
where with a unit of dB/m is the slope of the rail
vibration decay function versus the distance from the contact point along the rail.
The parameter is obtained by curve fitting over the rail vibration as a function of distance from the
contact point obtained by exciting the rail with an impact hammer in the vertical direction, the so-called
track decay-rate test.
The rate of vibration decay along the rail influences the noise radiated by the rail such that if the vibration
decays slowly, a longer part of the rail can vibrate and more sound power is radiated.
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3463

For the wheel, three main sources are defined as the radial-tread vibration, the axial-tread vibration and the
axial-web vibration. Since the tread and web responses are different and change by changing the position
of the contact force, average radial and axial responses must be determined.
Therefore, the average tread and web responses are obtained as:
( )
∑
( ) ( )
∑ ( )
( ) ( ) (15)
( )
∑
( ) ( )
∑ ( )
( ) ( ) (16)
(a) (b)
Figure 2: Segmentation of (a) the tread and (b) the web
where ( )
and ( )
are the response of each segment of the web and the tread, ( ) and ( )
are the
compliance obtained for the segment “(i)” of the web and the tread due to the force applied at the contact
point.
By introducing the impact force (equation (6)) in the above equations, the PSD of the average tread and
web responses are determined:
( )
∑{
}
( ) ( ) (17)
( )
∑{
}
( ) ( ) (18)
where [ ]
( ) [ ( )
( ) ( ) ] ( ) , and [ ]
( ) [ ( )
( ) ( ) ] ( ).
2.2 Vibro-acoustic model
In a general form, for a vibrating source as a finite monopole (e.g. a pulsating or oscillating sphere), the
radiated sound pressure received at a distance of from the source can be presented as:
( )
( ) ( ) ( ) (19)
where is known as the acoustic impedance with the air density of and the acoustic wave
velocity , ( ) denotes to the level of vibration velocity at the source point ,
is the surface
area of the radiation.
In addition, ( )
(with ) is defined as a Green’s function of the acoustic
wave propagation, and ( ) is the directivity factor and depends on the position of the receiver from
the source that can be defined by two angles: the elevation and the azimuth .
The directivity factor refers to the spatial distribution of the sound wave field. For an omnidirectional
radiation from a monopole sphere, the sound is radiated uniformly throughout all directions and the
directivity factor is equal to one.
The factor in the equation (19) is known as the radiation coefficient and is frequency dependent. The
radiation pattern depends on the excitation frequency and the vibration source type e.g. point source or
3464 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

line source, oscillating or pulsating. The radiation ratio is generally small at low frequencies and tends to
one at high frequencies. In the mid-frequency range, it depends on the size of the structure (the rail, wheel
or sleeper) and on the vibration wavelength in the structure (compared to the acoustic wavelength), [5].
According to Remington [1], the radiation efficiency of the wheel and the rail are defined as ( )
( ) , and ( ) ( ) , with and .
These ratios were obtained by means of the Rayleigh integral technique. This model does not take into
account the vibration distribution due to the mode shapes where a monopole model is used for the
determination of the wheel and rail radiation ratio.
Using a BEM approach, Thompson [6], showed that the radiation ratio can be significantly smaller at low
frequencies than that obtained by the Rayleigh integral method, whereas at high frequencies a difference
around 2 dB was found. He showed that the radiation of the wheel is close to that of a dipole model rather
than a monopole.
For the rail, however, he proposed a radiation ratio proportional to at low frequency corresponding to a
line dipole (an oscillating cylinder). Therefore, the same formulation as proposed by Remington et al. [1]
is used.
Accounting for the influence of the vibration modes of the wheel, Thompson et al. [6], proposed an
engineering formula for axial and radial motion of the wheel with a limited frequency range between 100
to 2000 Hz. However, higher than 2000 Hz, the radiation ratio tends to unity.
For the axial modes, the radiation ratio is defined as:
(
) (20)
where “n” denotes to the order of the axial mode, and .
For radial motion of the tread, the radiation ratio is defined as:
(
)
(
) (21)
with √( ) and √( ) Hz.
Note that the axial motion of the wheel at frequencies lower than 3000 Hz is mostly dominated by the
modes with the order of n = 0 and 1.
Assuming a stationary vibration source and regarding the shielding effect of the car-body on the wheel,
Zhang et al. (2010) [7] proposed a combination of monopole and dipole functions for the determination of
the horizontal ( ) and vertical directivity ( ) in which the vertical directivity of rolling noise for A-
weighted total level is determined as:
( ) ( ) ( ) (22)
with , and the horizontal directivity:
( ) ( ) (23)
In the new version of WRNOISE, the above directivity factors are added to the sound pressure level in the
free field at high frequencies where the wavelength of the acoustic wave is much shorter than the distance
between the receiver (the microphone) and the track e.g. .
2.2.1 Sound pressure due to rail and wheel
Different scenarios can be considered. Assuming the rail vibration as a finite line source, Remington et al.
[1] introduced the sound pressure due to running Na axle loads on two rails, which is obtained by:
( )
(24)
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3465

where is the perpendicular distance between the receiver and the average sound power per unit length of
the rail
( )
( ) , with the radiation area per unit length of the rail (rail head or
rail foot width).
In a similar way, he proposed the sound pressure due to the wheels in terms of the average sound power of
the wheel as follows [1]:
( )
(25)
where
( )
( ) , V is train speed, and T is slightly larger than the train pass-by
duration.
The average rail and wheel responses ( ) and
( ) are determined by means of equations (13),
(17) and (18) in the rail-wheel interaction model.
Considering an incoherency between the sources, the total sound pressure at the receiver can be obtained
by superposition of the sound pressure due to each source as follows:
( ) ( ) ( ) ( ) ( ) (26)
where ( ) and ( ) are the ground reflection effect.
The ground reflection effect depends on the distance between the receiver and the source ( ), the
frequency of radiating sound, and the ground or the pavement characteristics. Since the source is located
above the ground, the sound level can be amplified by the ground reflections. According to Remington
[1], at frequencies higher than 250 Hz, the filed measurements confirm an average increase of 3 dB.
However, the ground reflection is frequency dependent and varies by increasing the distance between the
source and the receiver, [2].
For a tangent track placed in the same level as the surrounding ground, the sound from the rail is highly
absorbed by the ballast and only the direct wave reaches the receivers, whereas the acoustic waves due to
the wheel vibrations can be amplified by the ground reflection. Therefore, in the following, the quantities
( ) and ( ) are used.
The numerical approach presented in this paper was implemented in a Matlab code and will be used for
the prediction of the wheel/rail rolling noise.
2.3 Inverse computation procedure
An inverse computation procedure is proposed to predict the average wheel roughness based on the rolling
noise level measured at receivers along an array of microphones besides the tracks.
In the inverse procedure, first, the noise level is predicted for a unit combined rail/wheel roughness and
then, the combined roughness is obtained by subtraction of the measured sound pressure from that
predicted due to unit roughness. By having the rail roughness from the measurement, the wheel roughness
will be determined by subtraction of the rail roughness from the combined wheel/rail roughness. In
general, several vehicle pass-bys are recorded, and an average value of the wheel roughness is obtained.
In the inverse procedure, the sound pressure due to the unit combined rail/wheel roughness is computed
using the numerical method implemented in the software WRNOISE. As mentioned before, in this method
the rail and the wheel characteristics such as the receptance of the wheel and the track, the track decay rate
(TDR), and the rail roughness are used as inputs and are obtained by measurements.
The inverse procedure was implemented in a Matlab code and integrated in a new software so-called INV-
WRNOISE. Figure 3 shows the computation flowchart that summarizes the numerical model used in the
software INV-WRNOISE.
3466 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

3 Experimental validation
The prediction model for determination of the wheel roughness based on the measured rolling noise is
examined. A reference site is selected along tramline 1 between Evergem and Flanders Expo in Gent (BE).
First, the track and the wheel dynamic characterizations as well as the rail roughness are determined by
experimental measurements. Then, the pass-by noise for different vehicle speeds from 30 to 42 km/h was
measured by a microphone placed at 7.5 m from the track centreline. The measurement site was selected
far from the main road to minimize the influence of road traffic noise.
Figure 3. Flowchart of the wheel roughness prediction model in the INV-WRNOISE software
3.1 Experimental characterization of the track
The track is a ballasted track. The sleepers as well as the rail foot are completely covered by the ballast.
The vehicles are the low-floor trams type Hermelijn with three bogies (series 6300) from the Flemish
public transport company “De Lijn”. The selected vehicle (with 6 axles) has a total length of about 29 m.
The average axle load (without passengers) is about 5 tons.
Average
Wheel Roughness
Unit combined Wheel/Rail Roughness
Measured
Wheel Admittance Wheel/Rail Interaction
Measured
Track Admittance
Wheel Reponse Rail Response
Wheel Vibration Rail Vibration Sleeper Vibration
Wheel Radiation Rail Radiation Sleeper Radiation
Sound Propagation
Computed
Wheel/Rail Rolling Noise
for unit combined roughness
Average combined
Wheel/Rail Roughness
Measured
Wheel/Rail Rolling Noise
subtraction
Measured
Rail Roughness subtraction
Contact Area Filter
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3467

Figure 4. Track admittance measured at two different positions. The grey lines display the results obtained
in the second position.
The track admittance was measured by exciting the railhead using an instrumented impact hammer and
measuring the rail vibration response at the same point in vertical and horizontal direction. Figure 4 shows
the admittance functions. In comparison to the vertical and horizontal admittance, the cross admittance has
a much lower amplitude. The measurement procedure was repeated in two points with a distance of about
45 cm from each other to identify “pinned-pinned” mode of the rail vibration. However, since the most
flexible part of the rail is covered by the ballast, we cannot clearly identify the vertical pinned-pinned
modes of the rail (around 1 kHz) in none of two measurement points.
To compute the average rail velocity (equation 13), the rail loss factor must be computed. As mentioned
before, the loss factor is related to the slope of the vibration decay function of the track. The vertical and
horizontal track decay functions were measured by measuring the rail responses at the reference point (e.g.
at x0 = 0 m) resulting from an excitation applied with an impact hammer on the rail head at different
locations over a distance from 0 to 10 m from the reference point, figure 5.
Figure 5. Decay rate measurement by hammer impact excitation at different distances
Figure 6 shows the rail decay functions versus the distance from the excitation point at different
frequencies. The slope of the decay function is obtained by curve fitting over the rail vibration as a
function of distance from the contact point [5].
3468 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

Figure 6. Rail decay functions versus distance from excitation point at different frequencies
3.2 Experimental characterization of the wheel
The wheel admittance was measured in the workshop. The measurements were performed on a wheel
mounted on a complete bogie placed on a wooden platform to avoid contact between the wheels and the
ground, figure 7.
Figure 7. Wheel admittance measurement setup
Figure 8 shows the radial and the axial admittance functions of the tread segments by hammer impacting
at different positions around the wheel circumference. The tread responses at 0° denotes to the wheel
admittance at contact point and are used to build the wheel admittance matrix ( ) in equation (3).
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3469

(a) (b)
Figure 8. (a) Radial and (b) axial tread admittance at different position around the wheel circumference
For the wheel web, only the axial responses are taken into account. In a similar way, the wheel web is
divided into three rings according to the position of the three sensors on the web.
3.3 The rail/wheel roughness
The rail roughness was measured on both rails of the track with a special measurement equipment (RSA)
developed by APT, [8]. The roughness is measured simultaneously in three different parallel positions on
the railhead by three displacement transducers. An average roughness spectrum was calculated for each
rail by energy wise averaging the three measured lines (three transducers). Figure 9 shows the average
spectrum of the measured rail roughness compared to the limit spectrum proposed by the standard ISO
3095:2005. The wheel roughness was measured in the workshop. The wheel roughness was measured on
four wheels with a special measurement equipment (WSA) developed by APT. The roughness is measured
simultaneously in three different parallel positions on the tread using three displacement transducers,
figure 10.
Figure 9. Averaged roughness spectrum compared with the limit spectrum proposed by ISO3095-2005.
3470 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

Figure 10. Wheel roughness measurement using three displacement transducers
An average roughness spectrum was calculated for each wheel by energy wise averaging the three
measured lines (three transducers). Figure 11 shows the average spectrum of the wheel roughness
compared to the limit spectrum proposed by the standard ISO 3095:2005. Knowing the vehicle speed, the
rail and wheel roughness can be presented in the frequency domain.
Figure 11. Averaged wheel roughness spectrum compared with the limit spectrum ISO3095-2005
3.4 Pass-by noise
The pass-by noise was measured at a distance of 7.5 m from the tramline 1 in Gent. The tram pass-bys at
the speed of 36, 38 and 42 km/h are selected. Figure 12 shows the pass-by noise level measured at 7.5 m
from the track during the passage of the Hermelijn trams at a speed of 38 km/h. In the following, these
results are used as the input for the average wheel roughness determination.
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3471
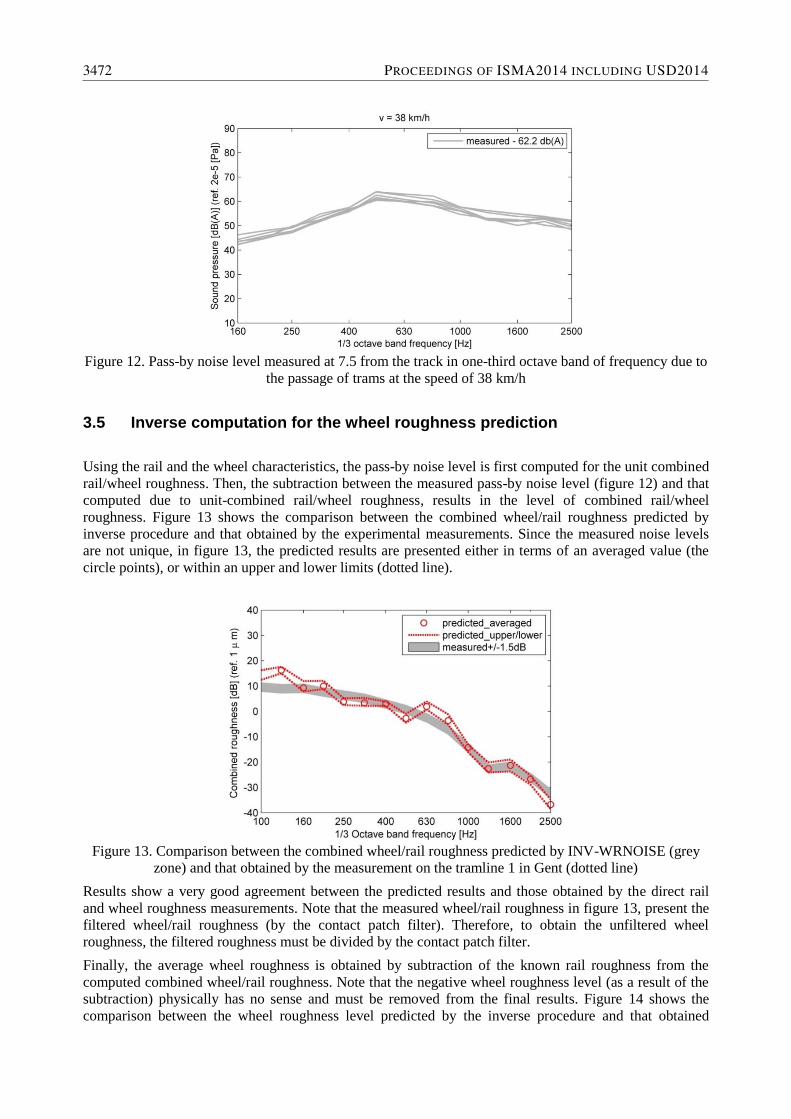
Figure 12. Pass-by noise level measured at 7.5 from the track in one-third octave band of frequency due to
the passage of trams at the speed of 38 km/h
3.5 Inverse computation for the wheel roughness prediction
Using the rail and the wheel characteristics, the pass-by noise level is first computed for the unit combined
rail/wheel roughness. Then, the subtraction between the measured pass-by noise level (figure 12) and that
computed due to unit-combined rail/wheel roughness, results in the level of combined rail/wheel
roughness. Figure 13 shows the comparison between the combined wheel/rail roughness predicted by
inverse procedure and that obtained by the experimental measurements. Since the measured noise levels
are not unique, in figure 13, the predicted results are presented either in terms of an averaged value (the
circle points), or within an upper and lower limits (dotted line).
Figure 13. Comparison between the combined wheel/rail roughness predicted by INV-WRNOISE (grey
zone) and that obtained by the measurement on the tramline 1 in Gent (dotted line)
Results show a very good agreement between the predicted results and those obtained by the direct rail
and wheel roughness measurements. Note that the measured wheel/rail roughness in figure 13, present the
filtered wheel/rail roughness (by the contact patch filter). Therefore, to obtain the unfiltered wheel
roughness, the filtered roughness must be divided by the contact patch filter.
Finally, the average wheel roughness is obtained by subtraction of the known rail roughness from the
computed combined wheel/rail roughness. Note that the negative wheel roughness level (as a result of the
subtraction) physically has no sense and must be removed from the final results. Figure 14 shows the
comparison between the wheel roughness level predicted by the inverse procedure and that obtained
3472 PROCEEDINGS OF ISMA2014 INCLUDING USD2014

directly by measurements on the wheels in the workshop. Results show a reasonable agreement at
frequencies higher than 400 Hz. At 250, 315 and 500 Hz, the wheel roughness became negative, the
reason why no value is shown at these frequencies.
Figure 14. Comparison between the wheel roughness level in one third octave band of frequency
predicted by INV-WRNOISE for a speed of 38 km/h and those obtained by measurements on the wheels
Performing a similar procedure for the measured results at different tram speeds e.g. 36, 38, 42 km/h, the
wheel roughness is presented as an averaged value. Figure 15 shows the predicted average wheel
roughness compared with the wheel roughness measured on 4 wheels in the workshop.
Figure 15. Comparison between the wheel roughness predicted by INV-WRNOISE and the average wheel
roughness measured on 4 wheels
At wavelengths smaller than 3 cm, the results show a better agreement with the measured value than those
at larger wavelength. This may be explained by the fact that the proposed inverse procedure is based on
the subtraction of the measured rail roughness from the predicted combined wheel/rail roughness. When
the combined wheel/rail roughness is dominated by the rail roughness, (here for the wavelength longer
than 3 cm) the subtraction tends to unreliable values. In this case, even a small error in the determination
of the combined wheel/rail roughness can produce a significant error in prediction of the wheel roughness.
Since the level of the rail roughness is much higher than the level of the wheel roughness, the rolling noise
is dominated by the rail roughness.
RAILWAY DYNAMICS AND GROUND VIBRATIONS 3473

4 Conclusions
In the frame of the QUIET-TRACK project, an inverse computation technique was developed to evaluate
the wheel roughness using the measured sound pressure at receivers along an array of microphones beside
the tracks. The track-vehicle interaction parameters such as the rail and the wheel receptances, the track
decay rate (TDR), and the rail roughness are the other parameters needed for the inverse computation.
The wheel roughness prediction model was experimentally validated. A measurement campaign was
performed in Gent (BE) where the pass-by noise level for passage of Hermelijn trams at various speeds
were measured. A very good agreement was found between the combined wheel/rail roughness calculated
by INV-WRNOISE software and that obtained by the experimental measurements.
These results reveal the limitations of the application of the proposed inverse method. The prediction
model is applicable when the wheel roughness is no more than 5 dB lower than the rail roughness. This is
likely the case for passenger trains equipped with disc brakes. For freight trains with cast-iron block
brakes, the rolling noise is generally dominated by the wheel roughness, [9].Obviously, when the wheel
roughness is negligible in comparison to the rail roughness, the pass-by noise is not influenced by the
wheel roughness, and it is impossible to determine the wheel roughness based on pass-by noise
measurements. In that case however, a measurement of the rail roughness alone is sufficient to calculate
the rolling noise levels.
Acknowledgements
The results presented in this paper have been obtained within the frame of FP7 European QUIET-TRACK
project entitled: “Quiet Tracks for Sustainable Railway Infrastructures”. The financial support of the
European Commission is gratefully acknowledged.
References
[1] P.J. Remington, Wheel/rail rolling noise, I: Theoretical analysis, Journal of the Acoustical Society of
America 81, 1805-1823 (1987).
[2] D. Thompson, Railway Noise and Vibration: mechanism, modeling and means, ELSEVIER, (2009).
[3] G. Lombaert, G. Degrande, J. Kogut, and S. François, The experimental validation of a numerical
model for the prediction of railway induced vibrations, Journal of Sound and Vibration 297, (2006).
[4] F.L. Courtois, J.H. Thomas, F. Poisson, and J.-C. Pascal, Identification of the rail radiation using
beamforming and a 2D array, Proceeding of the conference Acoustics 2012, April (2012), France.
[5] D.A. Bies, C.H. Hansen, Engineering noise control: Theory and practice, Taylor & Francis (2009).
[6] D.J. Thompson and C.J.C. Jones, Sound radiation from a vibrating railway wheel. Journal of Sound
and Vibration, 253, (2), 401-419 (2002).
[7] X. Zhang, The directivity of railway noise at different speeds, Journal of sound and vibration, 329,
5273-5288 (2010).
[8] Tom Vanhonacker. Accurate quantification and follow up of rail corrugation on several rail transit
networks . proceedings of Railway Engineering Conference. London. (2007).
[9] A. Bracciali, and M. Pippert, and S. Cervello, Railway Noise: The Contribution of Wheels, Basics,
the Legal Frame. Lucchini, (2009).
3474 PROCEEDINGS OF ISMA2014 INCLUDING USD2014