smart aquaculture system - nagasaki u
TRANSCRIPT

Smart Aquaculture System:A Remote Feeding System with Smartphones
Tetsuo Imai(Member, IEEE), Kenichi Arai, Toru KobayashiGraduate School of Engineering
Nagasaki UniversityNagasaki, Japan
Abstract—The problem of open water aquaculture using sub-mersible fish cages is to reduce costs of labor and feed. In thispaper, we propose the Smart Aquaculture System to reduce laborand feed costs by the labor saving of aquaculture, including auto-mated feeding and continuous observation of cages, optimizationof a timing and an amount of feeding. As a part of the system, weimplemented the Remote Feeding System comprised of a feedingdevice equipped inside the cage and a smartphone to controlthe device remotely. We confirmed the proper operation throughfield experiments including underwater.
Index Terms—Internet of Things, Remote sensing, Artificialintelligence, Submersible cage, Aquaculture.
I. INTRODUCTION
The technology developments of open water aquaculturehave been recently advanced, since aquaculture facilities incoastal areas have faced problems: red or blue tides damagescaused by unstable water quality and difficulty of buildinglarge scale facilities due to insufficient space [1]. Open wateraquaculture has advantages such as clear and stable waterquality and space for large-scale cages, as compared withcoastal aquaculture [2]. However, offshore cages require timeand effort in being towed and protected in case of high wavescaused by the monsoon or typhoon.
A submersible fish cage is a tool to avoid these problems.This is a mooring system in which a cage is controlled tofloat or sink by air control. In bad weather, it enables a cageto be sunk deeply enough not to be affected by the waves.Open water aquaculture using submersible fish cages has thefollowing advantages [3].
• Preservation of facilities, fish and shellfish from highwaves caused by the monsoon or typhoon
• Preventing death of fish and shellfish caused by red orblue tides
• Algae reduction by ups and downs of cages• Reducing the influence on fish and shellfish from lower-
ing the salt concentration and water surface temperaturecaused by the rain or in the rivers
• Antitheft• Avoidance oil pollution or river sewage
However, a challenge that aquaculture using submersible fishcages faces is labor costs. As compared to coastal aquaculture,
open water aquaculture using submersible cages requires thefollowing tasks.
1) Observation/prediction of the hunger of fish in offshorecages
2) Transportation of feed by ships to offshore3) Floating cages4) Throwing feed into cages5) Sinking cages again
This process requires labor, which causes a cost increase.Furthermore, the feed cost is an important issue among
aquaculture. For this reason,6) Optimization of an amount and a timing of feeding
is important to breed fish efficiently with a smaller amount offeed.
II. SMART AQUACULTURE SYSTEM
This paper suggests the Smart Aquaculture System usingIoT (Internet of Things) and AI (Artificial Intelligence) inorder to solve these problems(Fig. 1). This system has thefollowing functions and benefits.
Continuous observation of condition inside cagesBy transmitting information of the fish inside cagesunder water and the amount of leftovers by anunderwater camera or sensors to remote observationdevices, an aquaculturist is able to constantly checkthe inside of the cages. This enables him/her todetermine the best timing and the optimum amountof feeding, which saves labor about 1).
Optimizing the timing and amount of feedingBy storing the inside situation and the timing andamount of feeding as electronic data, the optimaltiming and the amount of feeding by skilled aqua-culturists is learnt by machine learning. This is anautomation of 6).
Remote feedingRemote feeding makes it unnecessary to go to thelocation by ships for feeding, which reduces the laborcost of 4).
Reducing the frequency of feed supply to tanks in summerThe tanks of the existing feeding machines to storethe feed are placed on the surface of the water, which

underwater drone
Control buoy
StopFeed Underwater feeding device
Smartphone
Cage control computer Air compressor
Sensors Camera
Tubes for compressed air supply, feed supply, power cable, communication cable, etc.
Aquaculturist can observe inside submergible cages and control feeding device with a smartphone.
Submergible cages
Fig. 1. Concept diagram of Smart Aquaculture System
makes the feed spoil quickly in hot weather. For thisreason, it is difficult to store a large amount of feed.By placing a feeding cage under water, this systemreduces a problem of the spoiled feed. This lightenslabor burden of 2).
Reducing labor for floating and sinking cagesThis system can constantly keep the cages underwater, which reduces labor costs to float or sinkcages. That realizes the omission of 3) and 5). More-over, stress received by fish caused by environmentalchange with floating/sinking cages can be reduced.
We propose and implement the Remote Feeding System,which is composed of feeding machines inside the cage underwater and a function to remotely control by smartphones.
III. REMOTE FEEDING SYSTEM WITH SMARTPHONES
Fig. 2 shows the outline of our developed Remote FeedingSystem. This system consists of a smartphone for control, acloud server on internet, a cage control computer provided ina control buoy, air valves, underwater cameras and sensorsinside the underwater cages and under water feeding devices.
The control smartphone is a device so that aquaculturistscan grasp the situation or control to feed fish. A trigger buttonfor feeding as an interface is implemented in the form ofthe web application operated on the smartphone. By tapping“Feed”/“Stop” buttons on the screen of the smartphone, itmakes it possible for them to give an instruction to start orstop feeding and check the information of sensors, which isdescribed later. Fig. 3 shows a screen image of our developedweb application on the control smartphone.
Smartphone
Stop
Feed
Cloud server
Text file
Stop
Feed
Control buoy
Cage control computer
Air compressor
Sensors
Air valve
Underwater feeding device
Write
Read
Fig. 2. System architecture of a remote feeding system
The cloud server on internet receives opening/closing con-trol signals of feeding tanks and stores them as text files. Byperiodically reading these text files, the cage control computer,mentioned later, detects operations controlled by the smart-phone. This leads to carry out the control of opening/closingthe feeding tanks.
The cage control computer is implemented by RaspberryPi, which is set inside the control buoy. It collects the data ofunderwater sensors, exchanges data with the cloud server andcontrols the air valves for the underwater feeding devices.
The air valves connected to an air compressor and the under-water feeding devices are for controlling of opening/closeingthe feeding tanks inside the underwater feeding devices. Thesevalves have 3 states, opening feeding tanks, closing feedingtanks and neutral, controlled by the cage control computer.
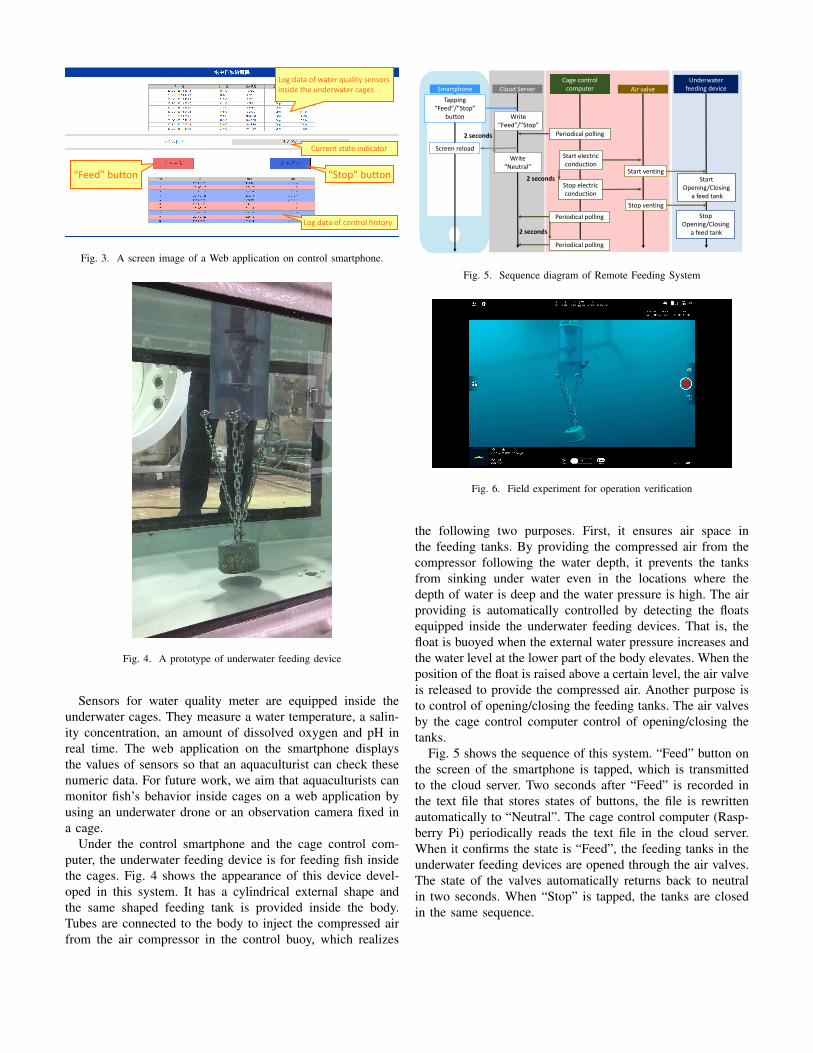
Log data of water quality sensors inside the underwater cages
“Feed” button “Stop” button
Log data of control history
Current state indicator
Fig. 3. A screen image of a Web application on control smartphone.
Fig. 4. A prototype of underwater feeding device
Sensors for water quality meter are equipped inside theunderwater cages. They measure a water temperature, a salin-ity concentration, an amount of dissolved oxygen and pH inreal time. The web application on the smartphone displaysthe values of sensors so that an aquaculturist can check thesenumeric data. For future work, we aim that aquaculturists canmonitor fish’s behavior inside cages on a web application byusing an underwater drone or an observation camera fixed ina cage.
Under the control smartphone and the cage control com-puter, the underwater feeding device is for feeding fish insidethe cages. Fig. 4 shows the appearance of this device devel-oped in this system. It has a cylindrical external shape andthe same shaped feeding tank is provided inside the body.Tubes are connected to the body to inject the compressed airfrom the air compressor in the control buoy, which realizes
Smartphone Cloud Server
Cage control computer Air valve
Underwater feeding device
Tapping “Feed”/”Stop”
button Write “Feed”/”Stop”
Periodical polling
Start electric conduction
Start venting
Stop venting
Screen reload
Stop electric conduction
Write “Neutral”
2 seconds
Periodical polling
Start Opening/Closing
a feed tank
Periodical polling
Stop Opening/Closing
a feed tank
2 seconds
2 seconds
Fig. 5. Sequence diagram of Remote Feeding System
Fig. 6. Field experiment for operation verification
the following two purposes. First, it ensures air space inthe feeding tanks. By providing the compressed air from thecompressor following the water depth, it prevents the tanksfrom sinking under water even in the locations where thedepth of water is deep and the water pressure is high. The airproviding is automatically controlled by detecting the floatsequipped inside the underwater feeding devices. That is, thefloat is buoyed when the external water pressure increases andthe water level at the lower part of the body elevates. When theposition of the float is raised above a certain level, the air valveis released to provide the compressed air. Another purpose isto control of opening/closing the feeding tanks. The air valvesby the cage control computer control of opening/closing thetanks.
Fig. 5 shows the sequence of this system. “Feed” button onthe screen of the smartphone is tapped, which is transmittedto the cloud server. Two seconds after “Feed” is recorded inthe text file that stores states of buttons, the file is rewrittenautomatically to “Neutral”. The cage control computer (Rasp-berry Pi) periodically reads the text file in the cloud server.When it confirms the state is “Feed”, the feeding tanks in theunderwater feeding devices are opened through the air valves.The state of the valves automatically returns back to neutralin two seconds. When “Stop” is tapped, the tanks are closedin the same sequence.

IV. FIELD EXPERIMENT
The field experiment is carried out at Mie Fishing Port,Nagasaki city, for the test operation of this system (Fig.6). Theunderwater feeding device was lowered from the ship downto a depth of 15 meters. We confirmed that the air spaceswere kept and the opening/closing of the feeding tank wasappropriately controlled. While the opening/closing of the tankis directly controlled by the valve of the air compressor in thisexperiment, the further experiment on the ground proved thatthe air valve was properly controlled by the control smartphoneand the cage control computer.
V. CONCLUSION
This paper describes about the implement of the RemoteFeeding System with smartphones as a part of the SmartAquaculture System by AI and IoT. The proper operation isconfirmed through the field experiments. Our future work is toimplement the functions to observe the activity of fish insidethe cages or the amount of the leftovers by using the under-water cameras or sensors to realize the Smart AquacultureSystem. This enables aquaculturists to check the situation ofthe cages. Furthermore, our goal is to develop the functionsto automatically estimate the fish’s activity and the leftoversusing the information of the underwater cameras and sensorsand automate the optimization of the timing and the amountof feeding by machine learning. Implementation of thesefunctions saves the labor costs and determines the economicoptimum amount of feeding, which leads to maximize theprofit by the aquaculture.
ACKNOWLEDGMENT
The authors wish to acknowledge Mr. Fukahori, KasutaniFishing Net MFG, for his useful advice for this research.This research was supported by the commissioned project forR&D of marine science and technology of Nagasaki IndustrialPromotion Foundation.
REFERENCES
[1] Fisheries Agency of Japan, http://www.jfa.maff.go.jp/j/kikaku/wpaper/h25 h/trend/1/t1 1 4 2.html (in Japanese).
[2] K. Komeyama, M. Kadota, S. Torisawa, K. Suzuki, Y. Tsuda, andT. Takagi, “Measuring the swimming behaviour of a reared pacific bluefintuna in a submerged aquaculture net cage,” Aquat. Living Resour., vol. 24,no. 2, pp. 99–105, 2011.
[3] Kasutani Fishing Net MFG. Co, LTD, http://www.kasutani.com/fisheryrelation/yousyoku keiryu/yousyoku keiryu.html (in Japanese).