smart robotic assistants for small volume manufacturing tasksruk.usc.edu/bio/gupta/srasvmt.pdf ·...
TRANSCRIPT

Smart Robotic Assistants for Small Volume Manufacturing Tasks
Satyandra K. Gupta
Director, Center for Advanced Manufacturing
Smith International Professor
Aerospace and Mechanical Engineering Department
Viterbi School of Engineering
University of Southern California

Examples of Applications for Traditional Industrial Robots
(Image Source: https://www.genesis-systems.com)
(Image Source: http://www.assemblymag.com)
(Image Source: http://www.durr-application-technology.com)
(Image Source: http://gizmodo.com)
ASSEMBLY
PAINTING
WELDING
LOADING AND UNLOADING
• Cannot share space with humans
• Need human experts to program robots
• Able to perform simple repetitive tasks
• Require significant lead time to develop custom hardware
• Installed at fixed locations
• Require high utilization rate to justify return on investment
Characteristics of Traditional Industrial Robots
Characteristics of traditional industrial robots make it difficult
to use them in small volume manufacturing
• Tasks that humans cannot do – High speed composite layup to improve part quality
• Tasks that human should not do – Handling of heavy parts
• Tasks that humans don’t want to do – Sanding and polishing, support structure removal from 3D
printed metal parts
Why use robots in small volume manufacturing applications?
Small volume manufacturing can benefit
tremendously from use of industrial robots!
• New capabilities are removing traditional barriers
• Industrial robot costs have come down
• It is now possible to consider using robots on small volume manufacturing applications
Current Situation
Develop physics-aware decision making methodologies and computational tools to
enable use of robots on non-repetitive manufacturing tasks
Our Goal
Examples of Small Volume Manufacturing Applications being developed at
USC Center for Advanced Manufacturing
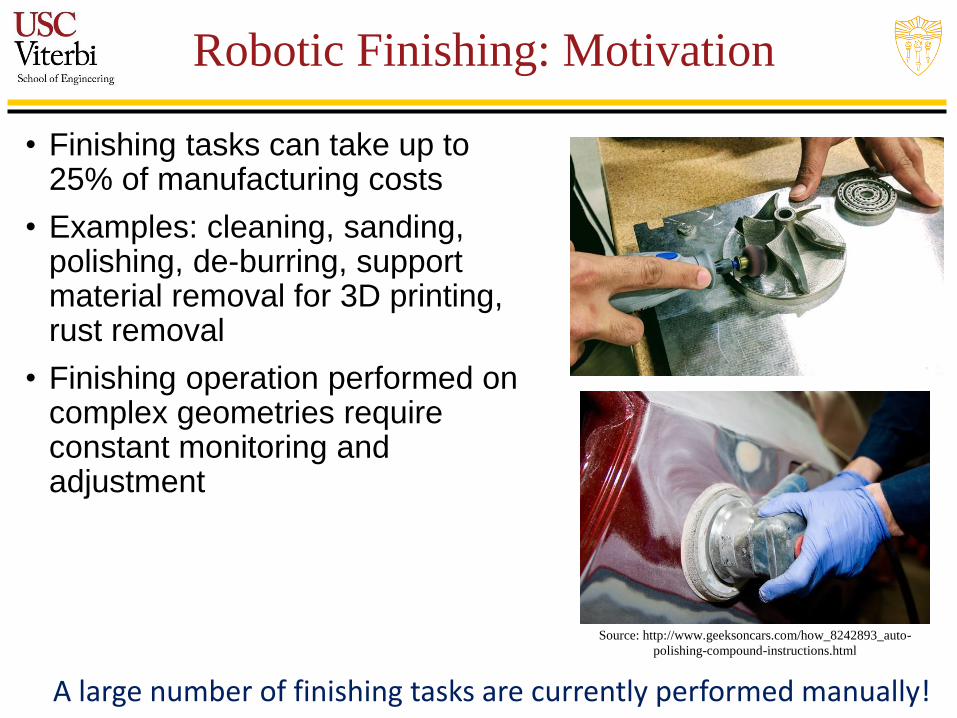
• Finishing tasks can take up to 25% of manufacturing costs
• Examples: cleaning, sanding, polishing, de-burring, support material removal for 3D printing, rust removal
• Finishing operation performed on complex geometries require constant monitoring and adjustment
Robotic Finishing: Motivation
A large number of finishing tasks are currently performed manually!
Source: http://www.geeksoncars.com/how_8242893_auto-
polishing-compound-instructions.html
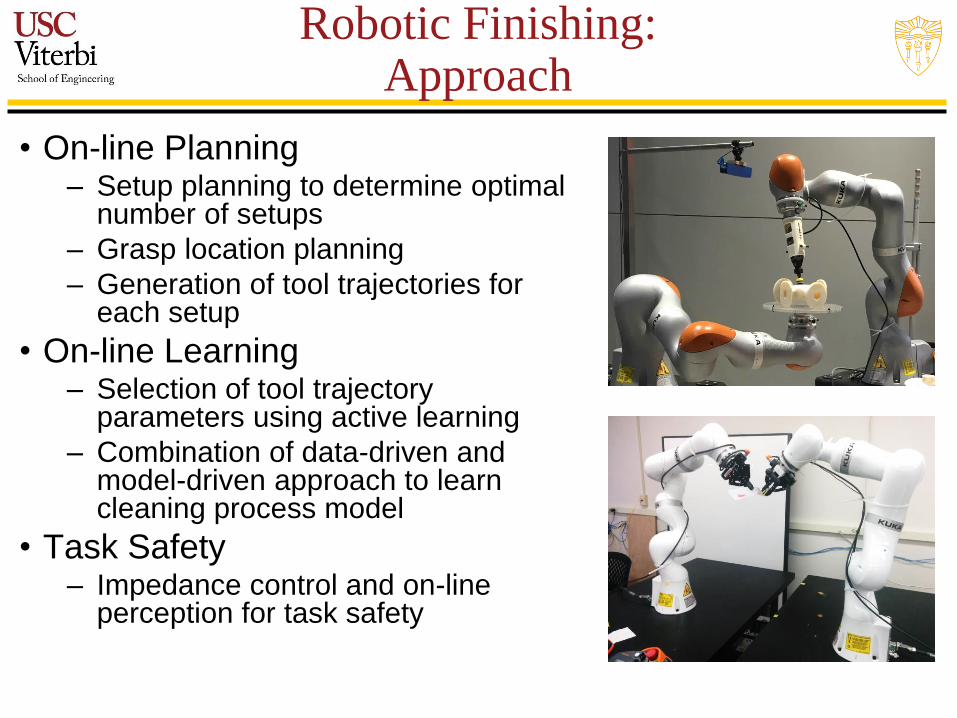
• On-line Planning – Setup planning to determine optimal
number of setups
– Grasp location planning
– Generation of tool trajectories for each setup
• On-line Learning – Selection of tool trajectory
parameters using active learning
– Combination of data-driven and model-driven approach to learn cleaning process model
• Task Safety – Impedance control and on-line
perception for task safety
Robotic Finishing: Approach

Robotic Finishing: Videos
• https://www.youtube.com/watch?v=JcsQF19Xe9I&list=PLJdnNVWiGuaoxL0sGNw-PNi8r3h2tK6zz (Advanced Robotic Finishing – KUKA Innovation Award 2017 Finalist Spotlight)
• https://www.youtube.com/watch?v=ulOU9eZTOT8&t=3s (Robotic Finishing Demo with User Interface)
• https://www.youtube.com/watch?v=yqwWaiCJ0Fs (Robotic Finishing Motivation)
• https://youtu.be/DbCDVHBuOwI (Robotic Finishing Experiments Compilation)
• https://www.youtube.com/watch?v=UXZqSVQ7UAs (Robotic Cleaning)
• https://www.youtube.com/watch?v=JANvQSgpqog (Robotic Cleaning of Compliant Objects)

Robotic Bin Picking for Complex Parts: Motivation
• Currently robotic bin picking
is used only for simple parts
• Robotic bin picking is not
used in mixed bins or parts
that have tendency to tangle
https://en.ids-imaging.com/casestudies-detail/en_case-study-ensenso-bin-picking.html
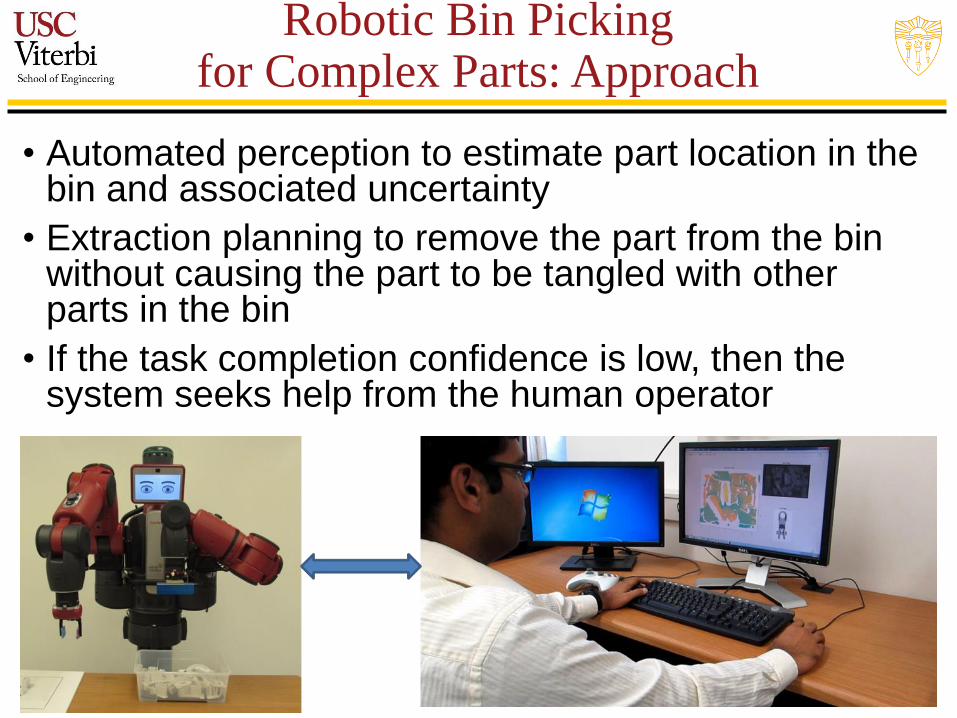
• Automated perception to estimate part location in the bin and associated uncertainty
• Extraction planning to remove the part from the bin without causing the part to be tangled with other parts in the bin
• If the task completion confidence is low, then the system seeks help from the human operator
Robotic Bin Picking for Complex Parts: Approach
Robotic Bin Picking for Complex Parts: Video
• https://www.youtube.com/watch?v=ZfcCmijILsw&t=27s (RoboSAM: Robotic Smart Assistant for Manufacturing)
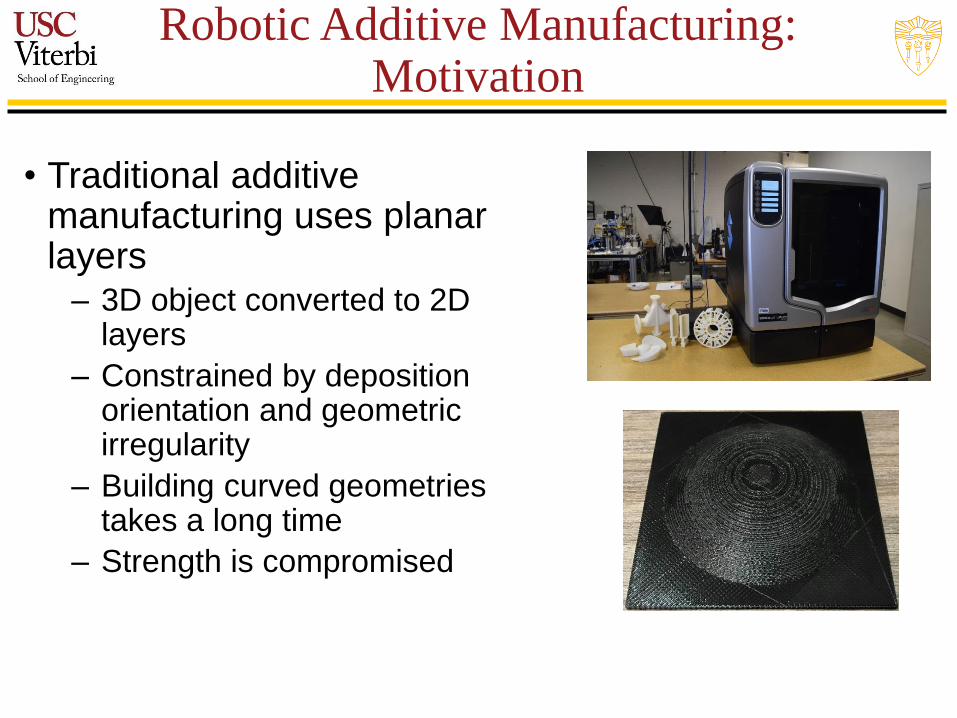
Robotic Additive Manufacturing: Motivation
• Traditional additive manufacturing uses planar layers
– 3D object converted to 2D layers
– Constrained by deposition orientation and geometric irregularity
– Building curved geometries takes a long time
– Strength is compromised
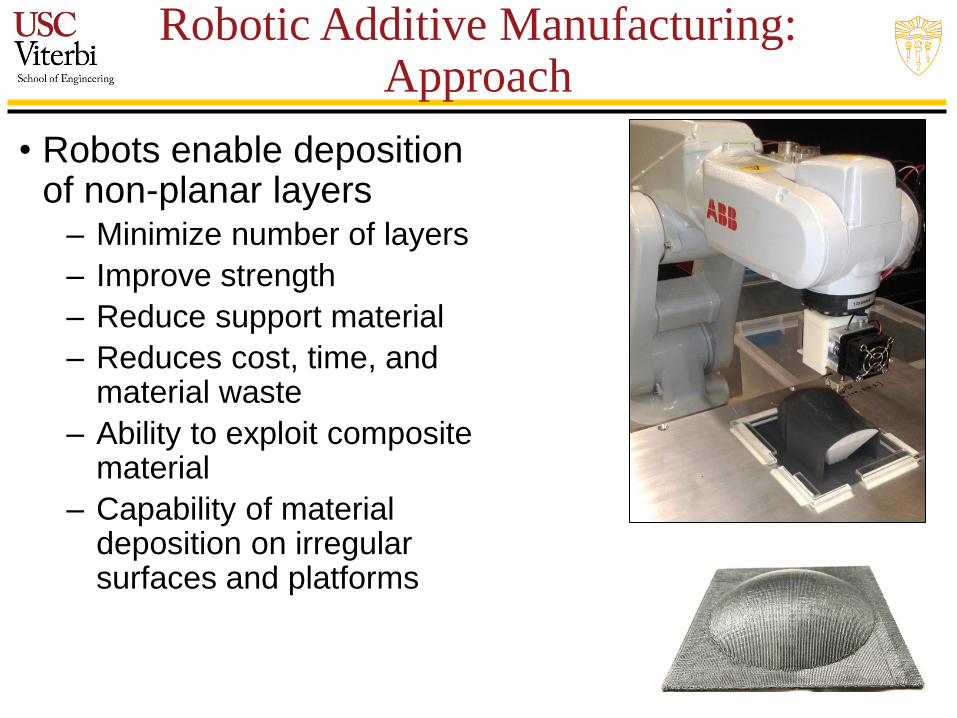
• Robots enable deposition of non-planar layers
– Minimize number of layers
– Improve strength
– Reduce support material
– Reduces cost, time, and material waste
– Ability to exploit composite material
– Capability of material deposition on irregular surfaces and platforms
Robotic Additive Manufacturing: Approach

• https://www.youtube.com/watch?v=Fec_40Qms5I (Additive Manufacturing with Non-planar Layers)
Robotic Additive Manufacturing: Video

Collaborative Assembly: Motivation
• Robots are used only on high
volume assembly applications
• Low volume applications will
require collaboration between
humans and robots
• Challenging tasks will need to
be assigned to humans
• Robots should be able to seek
help from humans to handle
contingencies
Source: GE, Photo: JIM R. BOUNDS, BLOOMBERG NEWS
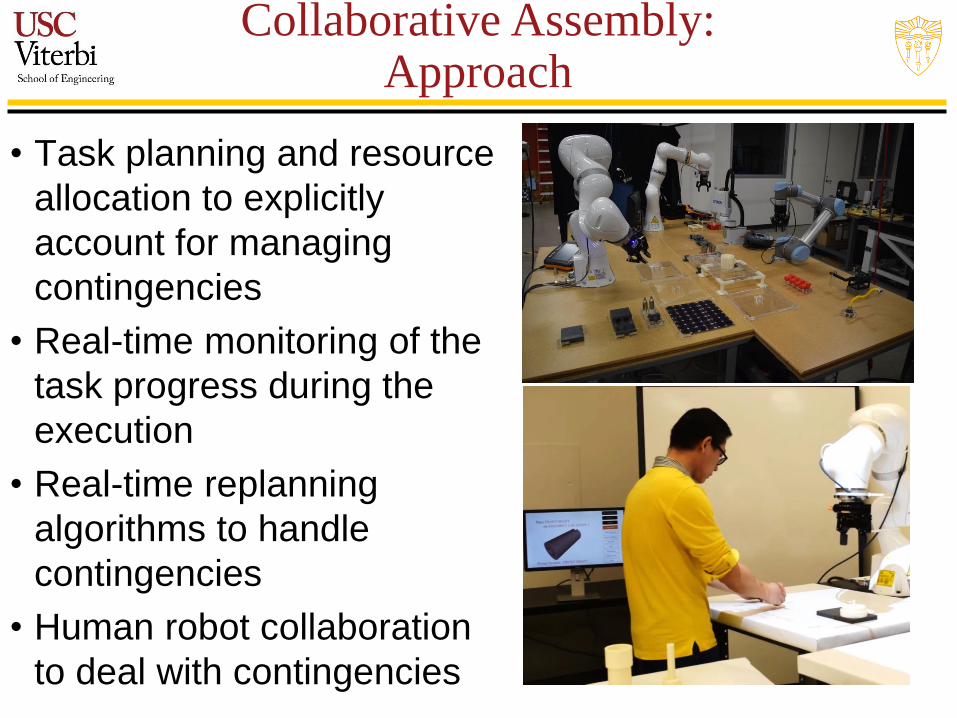
• Task planning and resource
allocation to explicitly
account for managing
contingencies
• Real-time monitoring of the
task progress during the
execution
• Real-time replanning
algorithms to handle
contingencies
• Human robot collaboration
to deal with contingencies
Collaborative Assembly: Approach
Collaborative Assembly: Video
• https://www.youtube.com/watch?v=DFOfMx_22vU&t=5s (Robotic Assistants to Support Complex Assembly Operations in Small Production Volumes)
• https://www.youtube.com/watch?v=_gAZchDyztg&t=6s (Assembly automation using smart robotic assistant)
• https://youtu.be/yqT2XHwkpOo (A Flexible Hybrid Cell for Low Production Volume Assembly)
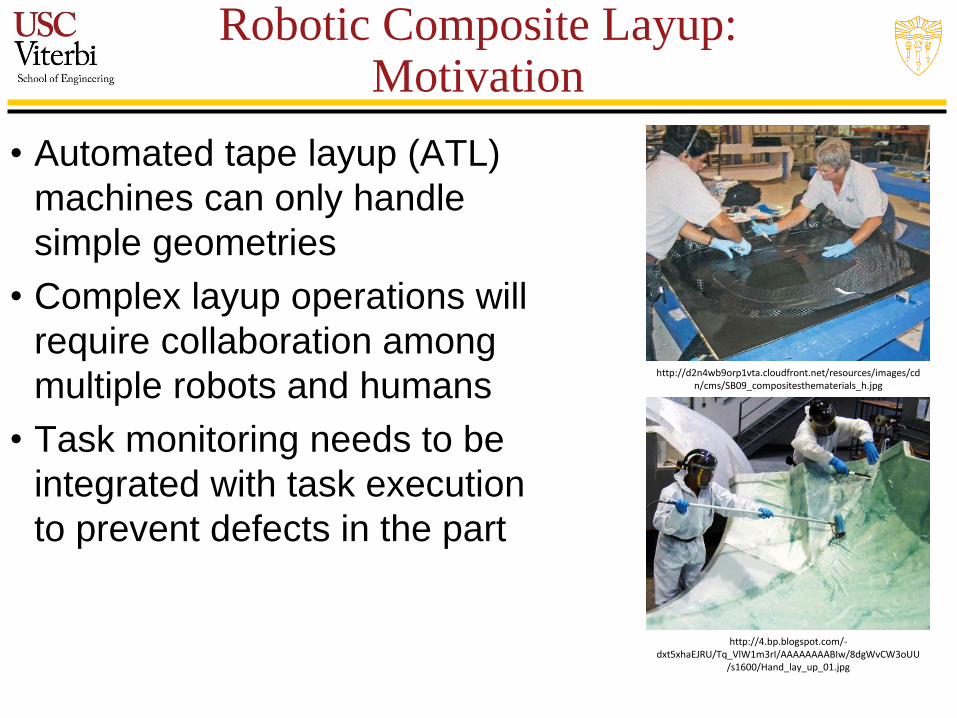
Robotic Composite Layup: Motivation
• Automated tape layup (ATL)
machines can only handle
simple geometries
• Complex layup operations will
require collaboration among
multiple robots and humans
• Task monitoring needs to be
integrated with task execution
to prevent defects in the part
http://d2n4wb9orp1vta.cloudfront.net/resources/images/cdn/cms/SB09_compositesthematerials_h.jpg
http://4.bp.blogspot.com/-dxt5xhaEJRU/Tq_VlW1m3rI/AAAAAAAABIw/8dgWvCW3oUU
/s1600/Hand_lay_up_01.jpg
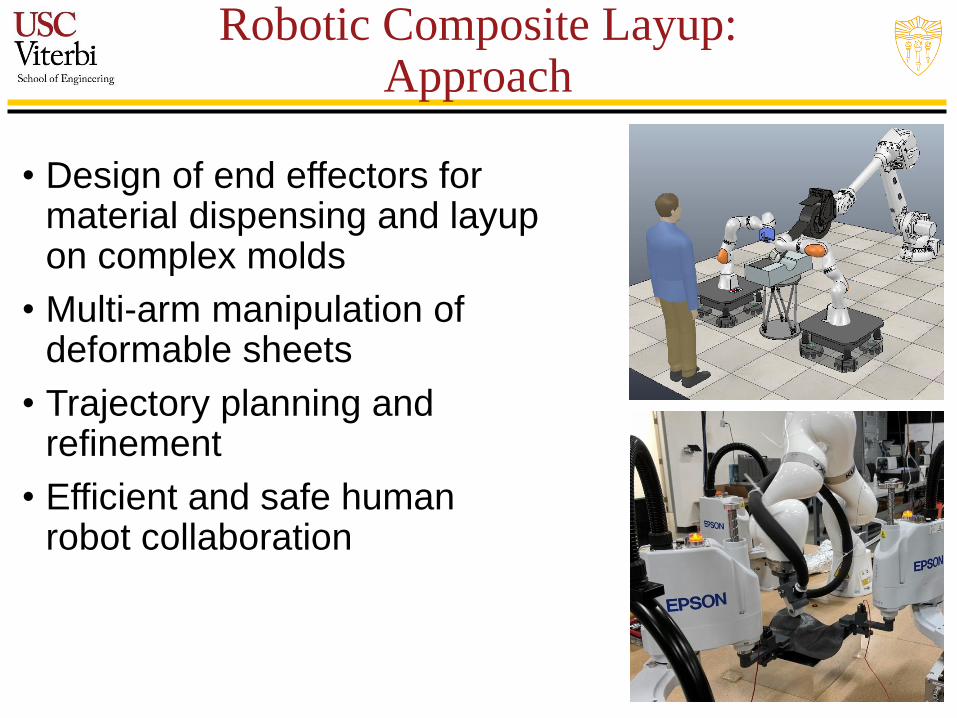
• Design of end effectors for material dispensing and layup on complex molds
• Multi-arm manipulation of deformable sheets
• Trajectory planning and refinement
• Efficient and safe human robot collaboration
Robotic Composite Layup: Approach
• https://www.youtube.com/watch?v=CYqKoqxBWso (Collaborative Robotic Cell for Composite Sheet Layup)
• https://www.youtube.com/watch?v=yUAUaATqINw (Hybrid Cells for Multi-Layer Prepreg Composite Sheet Layup)
Robotic Composite Layup: Video
Conclusions
• Recent advances in the field of industrial robots are adding new capabilities at an unprecedented rate
• Physics-aware decision making is a key to realizing smart robotic assistants
– Application context is very important – Need to model Interactions among
component technologies
• We have demonstrated feasibility of smart robotic assistants in new manufacturing applications ─ Finishing
─ Bin Picking for Complex Parts
─ Collaborative Assembly
─ Composite Layup
─ Additive Manufacturing
• Alsharhan, A. T., Centea, T., Gupta, S. K., Enhancing mechanical properties of thin-walled structures using non-planar extrusion based additive manufacturing. ASME Manufacturing Science and Engineering Conference, 2017.
• Kabir, A. M., Langsfeld, J. D., Zhaung, C., Kaipa, K. N., and Gupta, S. K. A systematic approach for minimizing physical experiments to identify optimal trajectory parameters for robots. IEEE International Conference on Robotics and Automation, 2017.
• Kabir, A. M. and Kaipa, K. N. and Marvel, J. and Gupta, S. K. Automated Planning for Robotic Cleaning using Multiple Setups and Oscillatory Tool Motions. IEEE Transactions on Automation Science and Engineering, 2017.
• Kabir, A. M., Langsfeld, J. D., Zhuang, C., Kaipa, K. N., Gupta, S. K. Automated Leaning of Operation Parameters for Robotic Cleaning by Mechanical Scrubbing. ASME Manufacturing Science and Engineering Conference, 2016.
• Kabir, A. M., Langsfeld, J. D., Shriyam, S., Rachakonda, V., Zhaung, C., Kaipa, K. N., Marvel, J., and Gupta, S. K. Planning Algorithms for Multi-Setup Multi-Pass Robotic Cleaning with Oscillatory Moving Tools. IEEE International Conference on Automation Science and Engineering, 2016.
References

• Kaipa, K. N., Kankanhalli-Nagendra, A. S., Kumbla, N. B., Shriyam, S., Thevendria-Karthic, S. S., Marvel, J., Gupta, S. K. Addressing Perception Uncertainty Induced Failure Modes in Robotic Bin-Picking, Robotics and Computer-Integrated Manufacturing, 2016.
• Kaipa, K. N., Shriyam, S., Kumbla, N. B., Gupta, S. K., Resolving Occlusions Through Simple Motions in Robotic Bin-Picking, ASME Manufacturing Science and Engineering Conference, 2016.
• Kaipa, K. N., Shriyam, S., Kumbla, N. B., Gupta, S. K. Automated Plan Generation for Robotic Singulation from Mixed Bins. IROS Workshop on Task Planning for Intelligent Robots in Service and Manufacturing, 2015.
• Kaipa, K. N., Kumbla, N. B., Gupta, S. K. Characterizing Performance of Sensorless Fine Positioning Moves in the Presence of Grasping Position Uncertainty, IROS Workshop on Task Planning for Intelligent Robots in Service and Manufacturing, 2015.
• Kaipa, K. N., Thevendria-Karthic, S. S., Shriyam, S., Kabir, A. M., Langsfeld, J. D., & Gupta, S. K., Resolving automated perception system failures in bin-picking tasks using assistance from remote human operators. IEEE International Conference on Automation Science and Engineering, 2015
• Kumbla, N. B., Thakar, S., Kaipa, K. N., Marvel, J., Gupta, S. K., Simulation Based On-Line Evaluation of Singulation Plans to Handle Perception Uncertainty in Robotic Bin Picking, ASME Manufacturing Science and Engineering Conference, 2017.
References (Cont.)

• Langsfeld, J. D., Kabir, A. M., Kaipa, K. N., Gupta, S. K. Online Learning of Part Deformation Models for Robotic Cleaning. ASME Manufacturing Science and Engineering Conference, 2016.
• Langsfeld, J. D., Kabir, A. M., Kaipa, K. N., Gupta, S. K. Robotic Bimanual Cleaning of Deformable Objects with Online Learning of Part and Tool Models. IEEE International Conference on Automation Science and Engineering, 2016.
• Morato, C. W., Kaipa, K. N., Liu, J., & Gupta, S. K. A framework for hybrid cells that support safe and efficient human-robot collaboration in assembly operations. ASME Computers and Information in Engineering Conference, August 2014.
• Morato, C., Kaipa, K., Zhao, B., & Gupta, S. K. Safe human robot interaction by using exteroceptive sensing based human modeling. ASME Computers and Information in Engineering Conference, August 2013
References (Cont.)

• Morato, C., Kaipa, K. N., Zhao, B., Gupta, S. K. Toward safe human robot collaboration by using multiple kinects based real-time human tracking. Journal of Computing and Information Science in Engineering, 14(1), 011006, 2014.
• Morato, C., Kaipa, K. N., & Gupta, S. K. Improving assembly precedence constraint generation by utilizing motion planning and part interaction clusters. Computer-Aided Design, 45(11), 1349-1364, 2013.
References (Cont.)