social robotics platform colorado state university 2014-2015 senior design electrical engineering...
TRANSCRIPT

Social Robotics Platform
Colorado State University 2014-2015 Senior DesignElectrical Engineering 401

Team
Team Members: Adam Kattnig – [CMPE] Circuitry/Software, Motors
Meng Koh – [EE] Circuitry/Software, Motors
Melissa Wirtz – [EE] Circuitry/Software, I/O
Josh Krokowski – [ME] Platform Design, Case & Motion
Tessa Alford – [ME] Platform Design, Case & Motion
Project collaborators: Anschutz Medical Center CU Denver Respite Care
Advisor: Dr. Tony Maciejewski

The Issue
Developmentally delayed children lack motor skills and understanding of control
Therapy normally takes many resources
Previous design has shortcomings (named Glus)

Objectives and Goals
Engages child
Provides feedback to teach control
Does not require the presence of a therapist
Toy is interchangeable and contains no electronics

Designed for Customer
Therapist Wizard mode Mode selection
Patient Fun toys – easy to interchange Dynamic and engaging movements

Constraints
Weigh < 20 pounds
Platform size: 16” by 16” to 24” by 24”
3” in height
Use four 1/8” jacks as input points
Have soft edges (case)
Platform is plugged into an outlet
Easy toy detachment
Perform multiple actions (8-12)

Budget
$500 from Anschutz Medical
$750 from ECE Department
Total = $1250
Projected Costs: Motors Electrical motors & drivers Mechanical components
The project’s costs should stay within budget.
http://www.yourmarketingcrew.com/wp-content/uploads/2012/03/dollar-sign.png

Design Concept
Goal: Move a toy that sits on a
platform Isolate toy from electronics
Solution: Based on 3D Printer design Magnetically attached

Motor Driver Circuit
Goal: Drive three motors Reduce cost
Solution Custom motor driver
circuitry
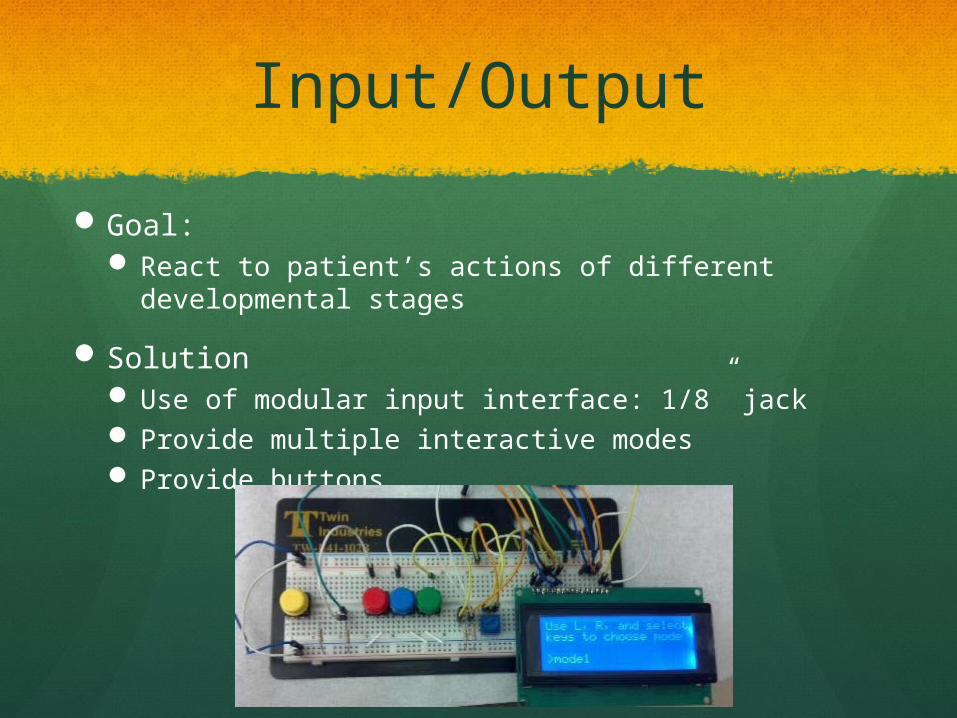
Input/Output
Goal: React to patient’s actions of different developmental
stages
Solution Use of modular input interface: 1/8” jack Provide multiple interactive modes Provide buttons
Risks
Device Usage Mechanical stability Physical danger to patient Lack of engagement
Design Process Time constraints
http://www.clipartbest.com/cliparts/4Tb/7L6/4Tb7L6ETg.png

Mitigation Plans
Device Plans: Rapid prototyping techniques Cover for moving parts Prototype and “test” with children for feedback
on level of engagement
Design Process Plans Time saving techniques Standard components when possible

Failure Modes & Effects Analysis

Feasibility Analysis
3D printed parts are most prone to mechanical failure
Finite Element Analyses performed to ensure reliable performance

Current Progress
Motor driver system developed
Movement subsystem nearly finished
Reward (sound and lights) subsystem interfaced

Future Plans
January: Finalize first design
February: Test at Respite Care
March: Iterative testing and design
April: Final packaging and presentation
May: Documentation finalization
Conclusion
No replacement for professional therapist Platform is powerful tool (supplement)
Allows children to practice Gives parents at-home exercise
Engage Children
Provides Children with Additional Therapy
Questions?
http://www.greenvilleshrinershospital.org/wp-content/uploads/2012/03/DSC09602.jpg
Project Website: http://projects-web.engr.colostate.edu/ece-sr-design/AY14/platform/