socially interactive robots - uni-hamburg.de · socially interactive robots socially ... i emotions...
TRANSCRIPT

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots
Socially interactive robots
Christine Upadek
29 November 2010
Christine Upadek 1
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots
Outline
Socially interactive robots
Emotions
Kismet - a sociable robot
Outlook
Christine Upadek 2
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Denition
Social robots are embodied agents that are part of a heterogeneousgroup a society of robots or humans They are able to recognizeeach other and engage in social interactions they possess histories(perceive and interpret the world in terms of their own experience)and they explicitly communicate with and learn from eachother([Fong et al 2003])
Christine Upadek 3
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classifying social robots
Robots can be classied according to
I how well the robot can support the social model that isascribed to it
I the complexity of the interaction scenario that can besupported
Christine Upadek 4
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part I
I socially evocative encourage people to anthropomorphize
I social interface natural interface which uses human-like socialcues and communication modalities
I socially receptive socially passive
I sociable pro-actively engage with humans
these four orignially from [Breazeal 2003b]
Christine Upadek 5
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots
Outline
Socially interactive robots
Emotions
Kismet - a sociable robot
Outlook
Christine Upadek 2
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Denition
Social robots are embodied agents that are part of a heterogeneousgroup a society of robots or humans They are able to recognizeeach other and engage in social interactions they possess histories(perceive and interpret the world in terms of their own experience)and they explicitly communicate with and learn from eachother([Fong et al 2003])
Christine Upadek 3
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classifying social robots
Robots can be classied according to
I how well the robot can support the social model that isascribed to it
I the complexity of the interaction scenario that can besupported
Christine Upadek 4
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part I
I socially evocative encourage people to anthropomorphize
I social interface natural interface which uses human-like socialcues and communication modalities
I socially receptive socially passive
I sociable pro-actively engage with humans
these four orignially from [Breazeal 2003b]
Christine Upadek 5
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Denition
Social robots are embodied agents that are part of a heterogeneousgroup a society of robots or humans They are able to recognizeeach other and engage in social interactions they possess histories(perceive and interpret the world in terms of their own experience)and they explicitly communicate with and learn from eachother([Fong et al 2003])
Christine Upadek 3
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classifying social robots
Robots can be classied according to
I how well the robot can support the social model that isascribed to it
I the complexity of the interaction scenario that can besupported
Christine Upadek 4
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part I
I socially evocative encourage people to anthropomorphize
I social interface natural interface which uses human-like socialcues and communication modalities
I socially receptive socially passive
I sociable pro-actively engage with humans
these four orignially from [Breazeal 2003b]
Christine Upadek 5
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classifying social robots
Robots can be classied according to
I how well the robot can support the social model that isascribed to it
I the complexity of the interaction scenario that can besupported
Christine Upadek 4
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part I
I socially evocative encourage people to anthropomorphize
I social interface natural interface which uses human-like socialcues and communication modalities
I socially receptive socially passive
I sociable pro-actively engage with humans
these four orignially from [Breazeal 2003b]
Christine Upadek 5
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part I
I socially evocative encourage people to anthropomorphize
I social interface natural interface which uses human-like socialcues and communication modalities
I socially receptive socially passive
I sociable pro-actively engage with humans
these four orignially from [Breazeal 2003b]
Christine Upadek 5
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Classes of social robots - Part II
I socially situated surrounded by social environment which theypercevice an react to
I socially embedded interact with others in social environmentsstructurally coupled with environment partially aware ofhuman interactional structure
I socially intelligent show aspects of human style socialintelligence
Christine Upadek 6
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Developing social robots
I emobodiment
I recognition of interaction partners
I communicationI natural languageI gesturesI facial expressions
I emotions
I learning and imitation
Christine Upadek 7
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Socially interactive robots Socially interactive robots
Human-oriented perception
I social robots must be able to perceive the world similar tohumans
I track people peoples gaze human features
I identify people
I recognize facial expressions gestures human activity
I interpret speech
Christine Upadek 8
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotions
I emotions are an important motivation system for complexorganisms
I involved in determining reactions to internal and externalevents
I positive emotionsI events that satisfy some motive
I negative emotionsI painful threatening situations
I motivate to get things straight prevent situations
Christine Upadek 9
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Emotion theory
I basic emotions anger disgust fear joy sorrow surprise
I basic emotion has a function
I emotional development rene emotions and acquire new
I emotions as a means of relevance-detection andresponse-preparation
Christine Upadek 10
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Role of emotions in communication
I emotions inuence voice facial expressions gestures andposture
I emotions can thereby be communicatedI communicate feelings to othersI inuence others behaviour
Christine Upadek 11
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Emotions Socially interactive robots
Communication of emotions through facial expressions
picture is an adapted version from [Russel 1997] by[Breazeal 2003a]
Christine Upadek 12
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismet
I [Breazeal 2003a]
I anthropomorphic robot head
I engages people inface-to-face interactionreminiscent of parent-infantexchange
I inspired by infant socialdevelopment psychologyethology evolution
image by Jared C Benedict licence CC by-sa 25[[httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg][httpuploadwikimediaorgwikipediacommons001Kismet_robot_20051016jpg]]
Christine Upadek 13
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets hardware
I 21 degrees of freedomI robots gaze 3I orientation of head 3I facial features (eyelids eyebrows
lips ears) 15
I 4 cameras 2 narrow eld of view 2wide eld of view
I 2 microphones (1 per ear) 1microphone worn by the person
I 15 processorsI 9 for visual processingI 5 for emotional processing and
speech synthesis
[Breazeal 2003a]
Christine Upadek 14
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets abilities
I direct gaze towards objects people
I track objects
I recognise humans emotions through voice
I express emotionsI speechI facial expressions
I act according to its drives and emotions
I react to external stimuli
Christine Upadek 15
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets emotional state
I long-term inuence by drivesI social drive be in presence of humans interact with humansI stimulation drive interact with things (colorful toys)
I fatigue drive shut out world after a certain time and resetdrives and emotions
I short-term inuence by emotionsI reaction to a certain condition like the need of an absent and
desired stimulusI triggers behaviour like seeking to explore the environment for
the desired stimulus
Christine Upadek 16
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-
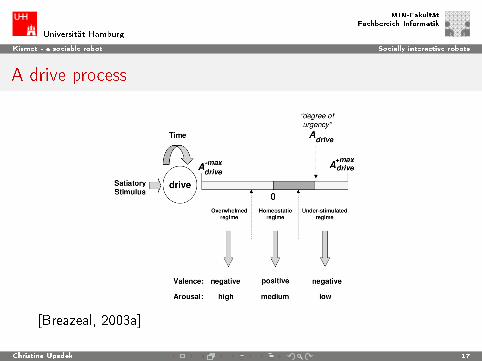
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
A drive process
[Breazeal 2003a]
Christine Upadek 17
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Kismets facial expressions
[Breazeal 2003a]
Christine Upadek 18
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Evaluation of expressive behaviour
I 47 to 83 (average 709) of the subjects recognised afacial expression from an image (random 10)
I 57 to 86 (average 776) of the subjects recognised afacial expression from a video clip (random 14)
I viewing movement of robots face and body strengthensrecognition
Christine Upadek 19
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Kismet - a sociable robot Socially interactive robots
Humans interacting with Kismet
I social cues help to tune humans behaviour
I persons actively engage the robot without under-stimulatingand without over-stimulating
I people were able to interact with Kismet and reactedaccording to Kismets (re)action
Christine Upadek 20
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Outlook and summary
I a lot of dierent research elds involved in creating sociallyinteractive robots
I many problems in theses elds not solved yet (speechrecognitionsynthesis visual processing ) or not solved asgood as humans can cope with theses problems
I robots only capable of human-like social interaction inrestricted scenarios
Christine Upadek 21
Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-

Universitaumlt Hamburg
MIN-FakultaumltFachbereich Informatik
Outlook Socially interactive robots
Literature
[Breazeal 2003a] Breazeal C (2003a)Emotion and sociable humanoid robotsInt J Hum-Comput Stud 59119155
[Breazeal 2003b] Breazeal C (2003b)Toward sociable robotsRobotics and Autonomous Systems 42(3-4)167175
[Fong et al 2003] Fong T W Nourbakhsh I and Dautenhahn K (2003)A survey of socially interactive robotsRobotics and Autonomous Systems
[Russel 1997] Russel J (1997)The Psychology of Facial Expression chapter Reading emotions from and into faces resurrecting adimensionalcontextualperspective pages 295320Cambridge University Press
Christine Upadek 22
- Socially interactive robots
- Emotions
- Kismet - a sociable robot
- Outlook
-