some preliminaries elements of mechanics dimensional homogeneity in mechanics elements of
TRANSCRIPT
EDWARD J. HICKIN: OPEN CHANNEL FLUID MECHANICS
Chapter 1 Some Preliminaries basic mechanics, units and dimensions, hydrostatics, and measurement
Elements of mechanics Units and dimensions Geometric units Kinematic units Equations of uniformly accelerated motion Dynamic units Newton’s Laws of Motion Dimensional homogeneity in mechanics Dimensional Analysis Elements of Hydrostatics Pressure in a liquid Pascal’s principle Buoyancy Archimedes’ principle Measurement: significant figures and uncertainty Significant figures Uncertainty in measurements The propagation of errors Concluding remarks References
The purpose of this chapter is to review some aspects of physics that represent the foundation on
which the ways of thinking about river flows presented here depend. Readers familiar with basic
mechanics and hydrostatics, dimensional analysis, and concerns about measurement precision
and accuracy, might more profitably leave Chapter 1 and begin your journey through the subject
of this book at Chapter 2. For those whose basic physics is a little rusty, Chapter 1 may serve to
refresh your memory about these matters. These preliminaries are treated here quite selectively,
just touching on topics that are of immediate relevance to the discussion in the pages ahead.
Much more is assumed to be already familiar. If you feel the need for a more comprehensive
account of this material you should consult one of the standard college texts in introductory
physics there are some suggestions at the end of this chapter). Other somewhat more particular
notions from physics are presented elsewhere in the text at the point where the discussion
requires their explanation.

Chapter 1: Preliminaries
1.2
Elements of mechanics
Units and dimensions
In mechanical systems all the physical properties governing motion can be reduced to three
fundamental dimensions: mass, length, and time. In the S.I. system of units (the particular
version of the metric system adopted as a standard in science), these dimensions are expressed as
follows:
dimension unit unit symbol
mass, M kilogram kg
length, L metre m
time, T second s
All other units in mechanics are derived units and follow largely from Newton's laws of motion.
These derived units involve various combinations of length, mass, and time and can be classified
into three groups: geometric, kinematic, and dynamic units.
Geometric units are powers of length as follows:
(a) length: L, m
(b) area: L2, m2
(c) volume: L3, m3
Kinematic units are derived from length and time and include:
(a) velocity: displacement or distance
elapsed time , dDdt = v =
LT or LT-1; ms-1;
(b) acceleration: change in velocity
elapsed time , dvdt = a =
LT-1
T = LT-2; ms-2;
(c) volumetric discharge: volume
time , dVodt = Q =
L3
T = L3T-1; m3s-1;
Chapter 1: Preliminaries
1.3
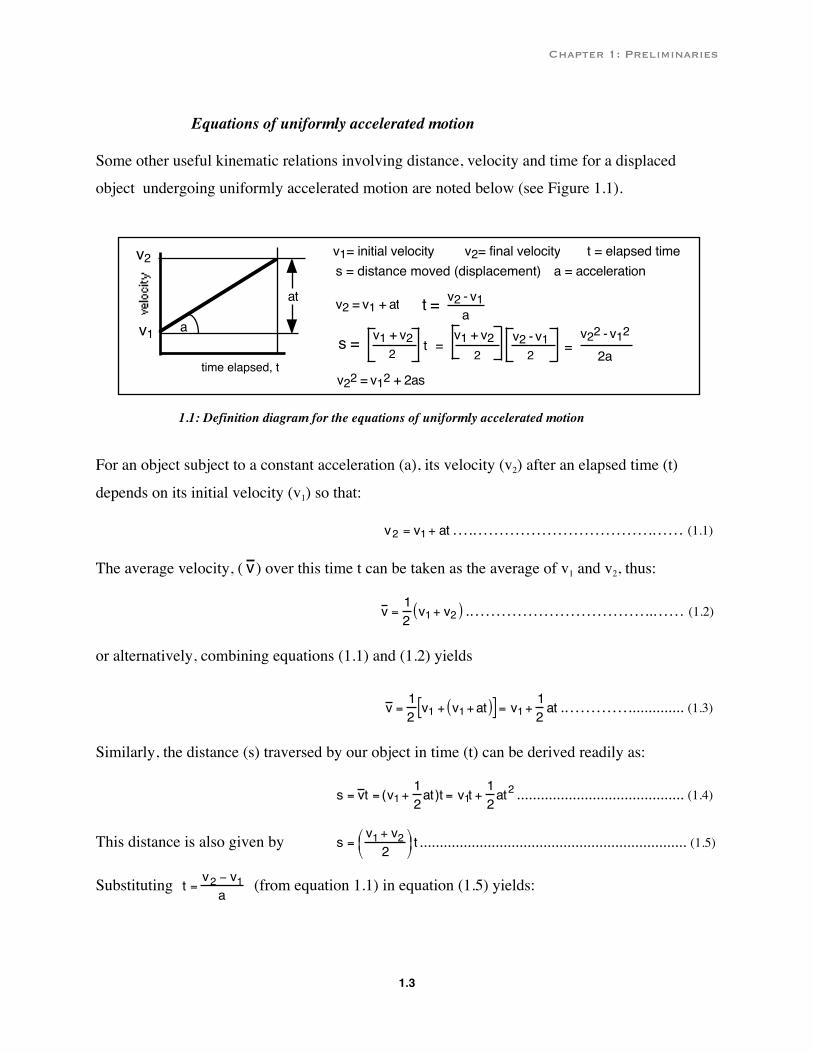
Equations of uniformly accelerated motion
Some other useful kinematic relations involving distance, velocity and time for a displaced
object undergoing uniformly accelerated motion are noted below (see Figure 1.1).
1.1: Definition diagram for the equations of uniformly accelerated motion
For an object subject to a constant acceleration (a), its velocity (v2) after an elapsed time (t)
depends on its initial velocity (v1) so that:
v2 = v1+ at….…………………………….…… (1.1)
The average velocity, ( v ) over this time t can be taken as the average of v1 and v2, thus:
v = 12 v1+ v2( ) .……………………………..…… (1.2)
or alternatively, combining equations (1.1) and (1.2) yields
v = 12 v1 + v1+at( )[ ] = v1+
12 at .………….............. (1.3)
Similarly, the distance (s) traversed by our object in time (t) can be derived readily as:
s = v t = (v1+12 at)t = v1t +
12 at2 .......................................... (1.4)
This distance is also given by s =v1+ v22
t ................................................................... (1.5)
Substituting t = v2 − v1a (from equation 1.1) in equation (1.5) yields:
time elapsed, t
v2
v1 a
a = acceleration
at
v1= initial velocity v2= final velocitys = distance moved (displacement)
t = elapsed time
v2 = v1 + at t = v2 - v1a
s = v1 + v22 t = v2 - v1
2v1 + v2
2 = v22 - v12
2av22 = v12 + 2as

Chapter 1: Preliminaries
1.4
s =v1+ v22
v2 − v1a
=
v22 − v122a or by rearrangement, 2as = v22 − v12
and v22 = v12 + 2as ...............................................................……….. (1.6)
Dynamic units incorporate length, mass, and time and involve definitions which
flow from the principles of dynamics formulated by the remarkable 17th century physicist and
mathematician, Sir Isaac Newton, principles which we know as Newton’s Laws of Motion.
Newton’s first law of motion, a confirmation of Galileo’s earlier observation, states that every
body remains at rest, or continues to move with constant velocity in a straight line, unless acted
upon by a force. The first part of this law, relating to a body at rest, most of us treat as common
sense but the second part, relating to a body in motion, is an idea that is not intuitively obvious.
Our common experience is that all objects set in motion (a rolling ball or a sliding hockey puck,
for example) will come to rest because of friction. Newton recognized the retarding force of
friction and abstracted the ideal case where friction vanishes.
An object that does not change its state of motion is said to be in equilibrium. Again, the fact that
an object at rest is in equilibrium is a more comfortable notion to most of us than the idea that an
object moving at a constant velocity in a straight line also represents an equilibrium state. But in
physics both states are taken to represent equilibrium.
We all know intuitively what is meant by force: it is a push or pull acting on a body. It is in fact
anything that causes a body to change its state of motion. Force here means net force. An object
in motion is unaffected by equally opposed forces because net force, or simply impressed force,
is zero.
Newton’s second law of motion states that a force acting on a body produces an acceleration in
its motion; this acceleration is in the direction of the force; the force necessary to produce a
given acceleration is equal to the product of the acceleration and a factor m characteristic of the
body itself; this factor, called the mass of the body, is directly proportional to the amount of
matter contained in it. Whereas the first law describes the motion of bodies in the absence of

Chapter 1: Preliminaries
1.5
forces, this second law describes the cause and effect relation between forces and motion. It
relates the disequilibrium condition involving a change in velocity, or acceleration, to the net
force impressed on the body, and to its mass. Indeed, the law serves as the vehicle for defining
both force and the unit of force. Mathematically we say that:
F = ma ……………….……………………….…… (1.7)
The unit for mass is the kilogram (kg) and those for acceleration are ms-2 so force has the
dimensions MLT-2 and units kgms-2. This unit is named for Newton so from this definitional
equality we can say that a force of 1N acting on a 1 kg mass will accelerate it by 1 ms-2.
This definitional equality should also remind us that the common notion of weight is not the
same as the mass of an object. Weight on planet Earth is the force that a body exerts by virtue of
the combined properties of mass and the acceleration produced by the attraction of gravity
towards the centre of the planet. Mass is an inherent property of a particular body but its weight
will vary with the pull of gravity (and the resulting gravitational acceleration). Although
gravitational acceleration, g, can be taken as sensibly constant at 9.80 ms-2, everywhere on Earth,
the weight of a given object would vary greatly if it were measured on the moon or on other
bodies with a mass different from that of Earth.
Newton’s third law of motion, states that every action has an equal and opposite reaction. This
law states that that, when a body exerts a force on another, the second body exerts an equal and
oppositely directed force on the first. This law, like the first, formalizes a commonplace
observation: if you push an object it pushes back on your hand; if you support a weight on a
rope, the rope pulls down on your hand. Less intuitively obvious, but also true, is the force that a
table surface exerts upwards in supporting the weight of a book resting on it. We will see later
that there are important analogous circumstances involving the forces exerted by flowing water
on the bed of a river (and the reaction force exerted by the bed against these forces).
Dynamic units in this Newtonian physics framework that we will put to use in the pages ahead
are summarized below:

Chapter 1: Preliminaries
1.6
(a) density, ρ (mass per unit volume) =
€
ML3 = ML-3; kgm-3
(b) weight (mass x gravitational acceleration) = MLT-2; kgms-2 or kgf; note that 'weight' here is
not mass but rather a body force acquired by virtue of gravitational acceleration; see the
discussion above.
(c) force = Ma = MLT-2; kgms-2 (Newtons, N)
(d) specific weight = weight per unit volume
= force per unit volume = MLT-2L-3 = ML-2T-2; kgfm-3 or Nm-3
(e) pressure is force/area = MLT-2L-2 = ML-1T-2; kgfm-2 or Nm-2
(f) shear stress is a tangential force per unit area and has the same dimensions and units as
pressure (MLT-2L-2 = ML-1T-2; kgfm-2 or Nm-2)
(g) work is defined as the product of a force and the distance moved by the point of its
application in the direction of application:
work = Fd = MLT-2L = ML2T-2; Joules
If a force of 1 N acts over 1m, the work done is 1J (Joule). Note that changes in energy result in
work being done; thus energy and work have the same dimensions and units.
(h) potential energy, PE, is the energy a body possesses by virtue of its mass and height above
some arbitrary datum in the presence of a gravity field; PE so defined also is equivalent to the
work done in raising a body of mass M to a height h against gravity g:
PE = mgh = MLT-2L = ML2T-2; Joules
(i) kinetic energy, KE, is the energy a body possesses by virtue of its mass and velocity; KE is
also work done in accelerating mass m to some velocity v, so that
KE =
€
12
mv2 = M(LT-1)2 = ML2T-2, Joules
(j) power, P, is the rate of doing work or of expending energy:
P = Wt or
Et =
€
ML2T−2
T= ML2T-3 Watt (1 Watt = 1 Joule/second)

Chapter 1: Preliminaries
1.7
(k) momentum is the product of mass and velocity = mv = MLT-1, kgms-1.
Other derived units of particular importance to fluid flow problems include dynamic (or
absolute) viscosity, properties of fluids that are discussed in Chapter 2.
(l) dynamic viscosity, µ = stress
strain rate = F/Av/h =
€
MLT−2L−2
LT−1L−1= ML-1T-1, kgm-1s-1
(m) kinematic viscosity, ν = µρ
=
€
ML−1T−1
ML−3= L2T-1, m2s-1.
Dimensional homogeneity in mechanics
Geoscientists use two fundamentally different sorts of relationship to describe the character of
natural systems: empirical relationships and functional or rational relationships. Because both
kinds of relationship are described using the same mathematical notation it is important to
remember the nature of the relationship behind the equation and not to confuse them, one with
the other. The first and most commonly employed is the empirical relationship. Here two or
more properties of a natural system are noted as varying together in space and/or time and the
graph of the relationship is commonly expressed in the form of a descriptive equation based on a
statistical line-fitting procedure known as least-squares regression analysis.
For example, it has been observed that, for many meandering rivers, the meander wavelength, L
increases as the bankfull discharge (Qb) of the river increases downstream. A scattergram of L
versus Qb has a trend that can be described statistically by the best-fit regression equation:
L = 55Qb0.5……………………………….……….. (1.8)
The relationship described by equation (1.8) has not been deduced by physical reasoning, it
merely describes how one measured property varies with another. One of the characteristics of
this type of empirical relationship is that their descriptive equations rarely are dimensionally
balanced. Equation (1.8), for example, implies the dimensional inequality L ≠ L3T-1. Indeed,
there is no reason to expect such correlations to exhibit dimensional balance; they simply
describe empirical association.

Chapter 1: Preliminaries
1.8
The second type of relationship, the functional (or rational) relationship, is a physically based
relationship that describes the actual physical processes involved rather than just showing
empirical association. If an equation describing the relations among components of a physical
system is complete in the sense that all the relevant variables are included, then the equation
must be dimensionally balanced. If it is not balanced dimensionally then we conclude that the
equation is not structurally sound and needs to be modified. We should note that the 'if' in the
preceding sentence, however, is rarely satisfied in geomorphology because we can never be sure
that we have included all the relevant variables in what are typically quite complex systems. For
this reason functional equations are not as commonly encountered in geomorphology as are
empirical relations.
Nevertheless, in certain simple cases, such as open-channel flow problems, it may be possible to
propose a physically based relationship in which the criterion of complete specification of the
physical system is met. In such cases dimensional balance should apply.
For example, discharge, Q, through a conduit of cross-sectional area, A, is deduced to be Q = Av
where v is the average velocity. The discharge Q is expressed in terms of metres3/second and the
units of Av are formed from the product of A (metres2) and velocity (metres/second) or again,
metres3/second. Or to restate the case in basic dimensions:
Q = A v
L3T-1 L2 LT-1 = L3T-1
A less trivial case is the equation known as Stokes' law describing the terminal velocity of a
spherical particle falling through a viscous fluid (see Chapter 6):
v = 2r2(ρs − ρf )g
9µ
Here the dimensions are LT−1 = L2(ML−3 )LT−2
ML−1T−1= L2ML−3LT−2M−1LT =LT−1
= L2ML-3LT-2M-1LT = LT-1

Chapter 1: Preliminaries
1.9
Certain dimensionless numbers also are used in fluid mechanics to specify the state of the flow
system in a way that is completely independent of the measurement units employed. They
include the Reynolds number:
Re = vdν
= LT−1LL2T−1
dimensionless dimensionless
and the Froude number:
F = vgd =
LT-1
(LT-2L)1/2 = LT-1
L1/2T-1L1/2
dimensionless dimensionless
This condition of dimensional homogeneity can actually be utilized in the solution of some
mechanical problems in a procedure known as dimensional analysis. This type of analysis also
requires that all the relevant variables in a system be specified. In simple systems the selection
of variables is correspondingly simple and the technique of dimensional analysis often is
successful in application. As systems become more complex, however, the selection of
appropriate variables becomes much less straightforward and success depends largely on the
judgment, experience and skill of the analyst. Here fluid mechanics becomes an art rather that a
science. Indeed, many regard dimensional analysis of complex problems as a very black art!
Dimensional Analysis
A relatively simple problem that can be used to illustrate the principles of dimensional analysis is
the derivation of the equation specifying the period of a swinging pendulum. It can be shown
from first principles (by balancing the forces acting on a simple pendulum) that the period of
motion, T, is given by
T = 2π lg .................................................................... (1.9)
where l is the length of the pendulum and g is gravitational acceleration. Alternatively,
dimensional analysis could arrive at a similar but somewhat more general solution as follows:

Chapter 1: Preliminaries
1.10
Step 1: Identify the variables relevant to the problem. We might guess on the basis of physical
reasoning that T will depend on pendulum length and mass and on gravity.
Step 2: Express relations among the variables in simple power function form:
period = k (lengtha, massb, gravityc) where k is a dimensionless constant
or T = klambgc............…………....................................... (1.10)
Step 3: Express the equation in terms of the three basic dimensions of length, mass, and time:
T = k la mb gc
M0T1L0 = La Mb (LT-2)c
M0T1L0 = La+c Mb T-2c
Gathering the exponents on like dimensional bases yields:
M: 0 = b
T: 1 = -2c
L: 0 = a + c
from which it follows that b = 0
c = -1/2
a = 1/2
Making the appropriate substitutions in equation (1.10) yields:
T = kl1/2m0g-1/2 = k lg
which is, of course, structurally equivalent to equation (1.9).
Note that k remains unknown and must be established by experiment (although we can see from
equation (1.9) that k must equal 2π). Note also that the dimensional analysis has corrected our
error in judgment at step 1: mass of the pendulum is not involved as a variable in this problem.
To use another example, consider the dimensional analysis of the drag retarding a small sphere
as it falls at terminal velocity through a viscous fluid. It seems reasonable to assume that the

Chapter 1: Preliminaries
1.11
viscous drag (a force, FD) will depend on the viscosity µ, the terminal velocity ω, and the
diameter of the sphere, D. The assumed algebraic expression, therefore, is
FD = kµaDbωc
and the dimensional equation is
MLT-2 = (ML-1T-1)a(L)b(LT-1)c = MaL-a+b+cT-a-c
from which it follows that 1 = a, 1 = -a + b + c, and -2 = -a - c
or, a = 1, c = 1, and b = 1.
Therefore, relations among the variables must be completely linear so that FD = kµDω, a general
form of Stokes' law (see Chapter 6).
We should also note that, even if our judgment about the governing variables is in error,
dimensional analysis will still produce an appropriately dimensionless grouping of the assumed
governing variables. In other words, if we are wrong to begin with, dimensional analysis will
not necessarily make it right!
In fluid mechanics, dimensional analysis is often used to organize the variables of a problem into
their most likely structure as an aid to experimental design; complete specification almost always
involves experimental work in order to evaluate the constants involved.
Elements of Hydrostatics
Pressure in a liquid
As the name suggests, hydrostatics, as opposed to hydrodynamics, is that branch of physics
concerned with the properties of water at rest. It is particularly concerned with how pressure is
transmitted through fluids in closed and open containers. It will be obvious to anyone who has
dived into a swimming pool or lake - sometimes painfully obvious - that pressure in the water
increases perceptibly as one descends even a small distance below the water surface. Although

Chapter 1: Preliminaries
1.12
we may sense in such a submerged state that the water is “pressing down” on us, the pressure at a
point in the water actually acts uniformly in all directions. The fact that standing water, by
definition, does not flow implies that this must be so. Consider an imaginary small cube of water
at depth; Newton’s second law of motion tells us that, since the velocity of the cube is zero, it
must be the case that the force per unit area (the pressure) acting on each face is balanced by the
same opposing pressure on the opposite face so that the resultant of force acting on all faces, the
net force, is also zero.
Figure 1.2 shows (a) a cylinder of liquid with a free water-surface, and (b) the contained water as
a free body in equilibrium for which the container is replaced by the forces its walls exert on the
fluid. Two forces act together vertically downward and by Newton’s third law, are equal to the
upward-directed force supporting the liquid cylinder P’hA (where P’ is the pressure exerted on
the lower face of the free body at a depth h below the water surface). The two forces acting
downward are the result of atmospheric pressure (PAA where PA is atmospheric pressure and A is
the area of the water surface) and the weight (W) of the cylindrical volume of water (W = mg
=ρVg = ρAhg).
Hence, we can state formally that:
€
P'h = PAA + ρghA ...................... (1.11)
Equation (1.11) indicates that the
pressure in excess of the atmospheric
pressure at depth h below the liquid
surface is directly proportional to
gravitational acceleration (g), the
density of the liquid (ρ), and the depth
of the liquid (h). This linear
proportionality with depth differs from 1.2: Definition diagram for forces acting on a cylinder of liquid
h
Free-body diagram of the liquid in the cylinder (a)
P AA
W = Ahgρ
P' Ah
h
a b
Cylinder containing a liquid of density filled to a height h ρ

Chapter 1: Preliminaries
1.13
the corresponding relation for gasses. Because gasses are compressible, the weight of a similar
column of gas results in compression of the gas with depth and density increases exponentially
with depth. Our case, however, is much simpler. The sensibly incompressible nature of water
means that, for all practical purposes, the average hydrostatic pressure in a column of water
occurs at h/2. It also follows from equation (1.1) that the difference in pressure between two
points whose depths differ by Δh is:
€
ΔP = ρgΔh ..................................................... (1.12)
In most problems in the fluid mechanics of open-channel flow we are
concerned only with pressure differences so that atmospheric pressure is
ignored in practice.
Pascal’s Principle states that, under equilibrium conditions, a change in
pressure at any point in an incompressible fluid is transmitted uniformly
to all parts of the fluid. This important principle is illustrated in Figure
1.3. Here an elbow-shaped cylinder is filled with liquid to a height h.
Although the depth of water above point B in the horizontal part of the
elbow is equal only to the cylinder diameter, d, Pascal’s principle dictates
that the pressure here must be equal to that at point A (PAA + ρghA). If
this were not the case, of course, the fluid would flow along the pressure
gradient from point A to B. Pascal’s principle is put to good use in
hydraulic machines although we will not be concerned with that
application here.
Buoyancy is a force which, when we are swimming, we experience as
the familiar tendency to float. Submerged objects such as boat anchors
are more easily raised through the water to the surface than from the
water surface to the boat because of the greater buoyant lift given by
water. It is the same force that lifts a helium-filled weather balloon
through the air.
This upward buoyant force is exerted on a submerged object because the
hydrostatic pressure at the base of the object is greater than that on its
A B
h d
water surface
1.3: Pascal's principle dictates that pressures at points A and B are equal.
T
mg
p1
p2
1.4: Forces acting on a submerged cylinder suspended by a wire under tension, T
h

Chapter 1: Preliminaries
1.14
upper surface above which the depth of water is lower. Consider the small solid cylinder
suspended in a liquid by a support wire as shown in Figure 1.4. Equation (1.12) indicates that the
difference in hydrostatic pressure between the top and the base of the cylinder must be
ΔP =ρgΔh= ρgh where h is the height of the submerged cylindrical object. Thus the difference in
the upward force acting on the lower surface and the downward force acting on the upper surface
(the buoyant force, FB) must have a magnitude given by:
€
ΔPA = FB = ρghA =WL ................................................. (1.5)
where ρ is the density of the liquid. Clearly, the buoyant force FB is equal to the weight (WL) of
the water displaced by the submerged cylinder.
Archimedes’ Principle, the fundamental law of hydrostatics illustrated by this example, states
that a body completely or partially submerged in a fluid is buoyed up by a force equal to the
weight of the fluid it displaces. As we will see in Chapter 6, Archimedes’ principle is an
important factor in any consideration of the forces acting on submerged grains resting on the bed
of a river. The submerged weight of such a grain must be discounted by the buoyant force so
that its immersed weight W is given by:
€
W =Vg(ρs − ρw ) ........................................................... (1.6)
where V is the particle volume and ρs and ρw are respectively the density of the sediment particle
and of the water.
Measurement: significant figures and uncertainty
Whether we are concerned with the density of a solid, or the velocity of flowing water or the
hydrostatic pressure in a water column, our observations must be expressed in quantitative form
based on primary measurements and on derived expressions based on manipulation of these
measurements. Now that we all routinely use increasingly powerful calculators and computers
which in a few milliseconds produce eight or more decimal places for any and all kinds of
calculation, it is more important than ever to remind ourselves of the real meaning of all that
apparent computing power and precision! Here is also a good place to consider the effects of
uncertainties in our measurements as they are propagated through the equations we employ to
solve numerical problems in fluvial geomorphology.

Chapter 1: Preliminaries
1.15
Significant figures
Although our calculators and computers carry computations to eight or more decimal places the
final results are only as accurate as the original measurements on which they are based.
Obviously your calculator cannot refine a measurement although it is quite easy to overlook this
basic limitation on the accuracy of measurements when a lot of numerical manipulation is
involved in solving a problem.
Suppose you are asked to find out how long it would take an object moving at a velocity of 7.1
ms-1 to travel a distance of 6 m. The solution on a typical calculator is 6 ÷ 7.1 = 0.8450704 s.
Obviously this many decimal places is meaningless since one of the original elements, namely 6
m, was only measured accurately as a whole number. The best answer you can report is that the
time of travel is 0.8 s.
Again, suppose that you have to measure the length of a pencil with a ruler divided into
centimetre and millimetre divisions. Your initial measurement is 15.5 cm but you decide that a
more precise measurement is required and you repeat the exercise with the aid of a magnifying
glass that enables you to estimate that the pencil length is between 15.56 cm and 15.58 cm. Thus,
you report the length as 5.57 cm. The last digit, although somewhat doubtful, is significant
because it tells us something about the accuracy of your measurement device (the ruler scale)
and something about your ability to use it. Your measurement of 15.57 cm therefore has four
significant figures. If you wish to report this measurement in metres (0.1557 m) or in
millimetres (155.7 mm) the number of significant figures is still four.
Note that the zero to the left of the decimal place in 0.1557 m merely helps mark the place of the
decimal point and does not count as a significant figure. In contrast, the zero in a velocity
measurement of 1.02 ms-1 is a significant figure so we can say that the measurement has three
significant figures.
In some cases zeros are used only to express the size of a number, and are not significant. For
example, the speed of light in a vacuum has been measured as 299 800 000 ms-1. Here the
structure of the number tells you something about the accuracy of the measurement; it is
indicated more clearly using scientific notation: 2.998 x 108 ms-1. Thus, we can see that this
Chapter 1: Preliminaries
1.16
particular measurement of the speed of light has four significant figures.
Arithmetic operations must also respect the numbers of significant figures in the elements
involved. For example, if we add 2.41 (three significant figures; doubtful number in bold) to
7.118 (four significant figures), the result is 9.528. Since it makes sense to indicate only the last
digit as doubtful, we round up the final digit from 2 to 3 and report the result as 9.53. The same
rule applies to multiplication and division. A rule of thumb here is that the result cannot have
more significant figures than the least accurate of the elements, so that, for example, 2.2 x 3.007
= 6.6, not 6.615. An exception to this rule, of course, is when the number of digits to the left of
the decimal point increases as a result of addition: for example, 9.6 + 1.97 = 11.57 would be
reported as 11.6. This result has three significant figures even though one of the original
elements (9.6) has only two.
Uncertainty in measurements
No physical measurement is 'exact' and it often is useful to have an indication of the uncertainty
involved. In the earlier example where the pencil was reported as being 15.57 cm long, we could
say with certainty that it was not less than 15.56 cm but not longer than 15.8 cm. In effect we are
reporting that the length is 15.57 ± 0.01 cm. This uncertainty (or error) in the measurement is a
random error because there is equal probability that a given measurement will be greater or less
than 15.57 cm. Also the absolute deviation from 15.57 cm will vary from measurement to
measurement depending on variable operator performance (the 'human factor'). Because these
random errors are the product of chance, we reduce their effect by taking large numbers of
measurements and taking the average value. The ± error associated with the average value can
then be expressed as a standard deviation of the measurements in the set or sample.
In addition to random errors, measurement uncertainty may include systematic errors.
Systematic errors are always either positive or negative and therefore bias the result in a
particular direction. Such errors include instrument effects where, for example, a drift off
calibration produces measurements which are consistently too high or too low. In our pencil
length example, a distorted scale on the ruler would produce a systematic error. They may
involve operator bias (for example, a consistent tendency to lean to the right when reading the
ruler scale would produce a systematic parallax effect) or some external influence such as
temperature or humidity.

Chapter 1: Preliminaries
1.17
It is important to recognize and eliminate systematic errors during the course of an experiment or
field survey although in practice random and systematic errors are sometimes difficult to
distinguish one from the other.
The propagation of errors
Although uncertainties or errors in individual measurements may be assessed at the time of
measurement, their interactive effects in subsequent computations are not intuitively obvious.
The rules for propagation of errors in formulae involving addition, subtraction, multiplication,
division, and powers, are examined below. There are additional rules for other operations such
as those involving trigonometric functions but these will not be considered here. If you are
interested in pursuing this topic further you should consult one of the many texts on error
analysis (there are some suggestions in the references).
(a) Addition and subtraction rule: If a number of measured quantities (a, b, c,......) with associated
±error terms (Δa, Δb, Δc,....) are added or subtracted, then the sum (or difference) of these terms
(F) and the resulting error (ΔF) is given by
ΔF = (Δa)2 + (Δb)2 + (Δc)2........
For example, to calculate X ±ΔX
when X = 4.03 (±0.01) + 15.1 (±0.3) + 0.382 (±0.011)
X = 4.03 + 15.1 + 0.382 = 19.512 = 19.5
and ΔX = (0.01)2 + (0.3)2 + (0.011)2 = 0.090221 ≅0.3
so that X±ΔX = 19.5 ±0.3
Similarly, to calculate X ±ΔX
when X = 4.03 (±0.01) - 15.1 (±0.3) - 0.382 (±0.011)
X = 4.03 - 15.1 - 0.382 = -11.452 = -11.5
and ΔX = (0.01)2 + (0.3)2 + (0.011)2 = 0.090221 ≅ 0.3
Chapter 1: Preliminaries
1.18
so that X±ΔX = -11.5 ±0.3
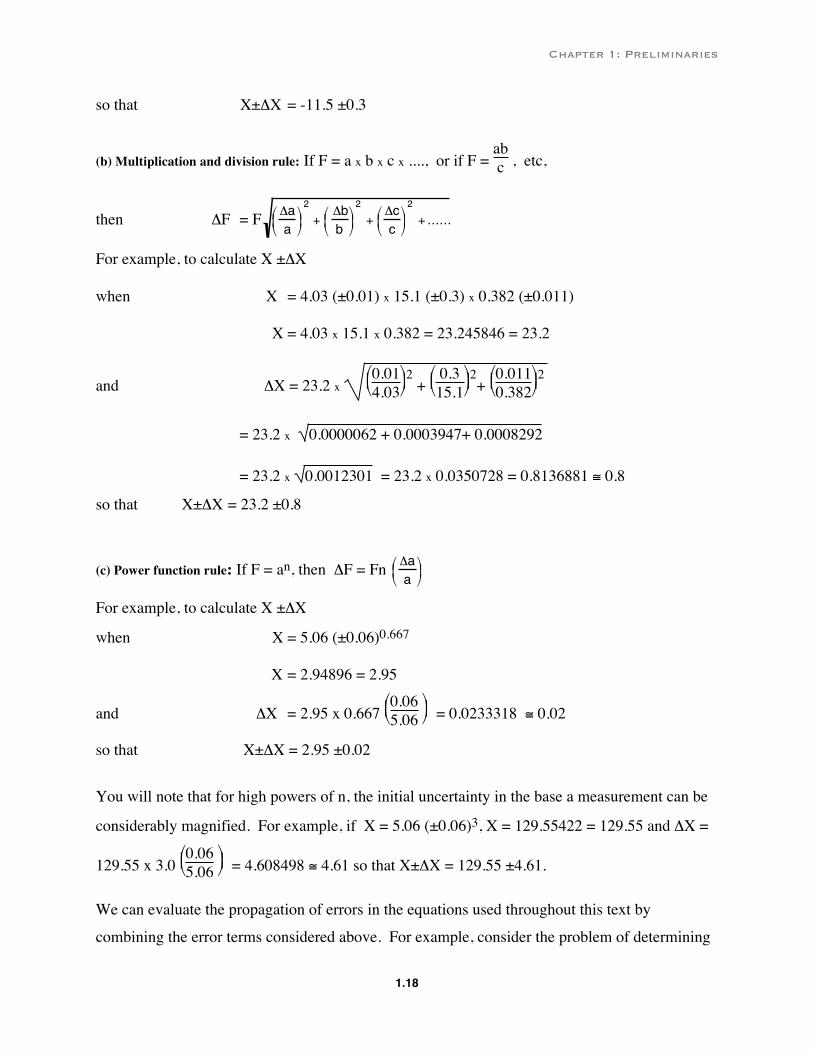
(b) Multiplication and division rule: If F = a x b x c x ...., or if F = abc , etc,
then ΔF = F Δaa
2
+Δbb
2
+Δcc
2
+ ......
For example, to calculate X ±ΔX
when X = 4.03 (±0.01) x 15.1 (±0.3) x 0.382 (±0.011)
X = 4.03 x 15.1 x 0.382 = 23.245846 = 23.2
and ΔX = 23.2 x
0.01
4.032 +
0.3
15.12+
0.011
0.3822
= 23.2 x 0.0000062 + 0.0003947+ 0.0008292
= 23.2 x 0.0012301 = 23.2 x 0.0350728 = 0.8136881 ≅ 0.8
so that X±ΔX = 23.2 ±0.8
(c) Power function rule: If F = an, then ΔF = Fn Δaa
For example, to calculate X ±ΔX
when X = 5.06 (±0.06)0.667
X = 2.94896 = 2.95
and ΔX = 2.95 x 0.667
0.06
5.06 = 0.0233318 ≅ 0.02
so that X±ΔX = 2.95 ±0.02
You will note that for high powers of n, the initial uncertainty in the base a measurement can be
considerably magnified. For example, if X = 5.06 (±0.06)3, X = 129.55422 = 129.55 and ΔX =
129.55 x 3.0
0.06
5.06 = 4.608498 ≅ 4.61 so that X±ΔX = 129.55 ±4.61.
We can evaluate the propagation of errors in the equations used throughout this text by
combining the error terms considered above. For example, consider the problem of determining

Chapter 1: Preliminaries
1.19
the uncertainty in the magnitude of roughness n computed from Manning's equation if the
following measurement errors apply:
water surface slope, s = 0.005 ±0.001
mean flow depth, d = 2.00 ±0.30 m
mean flow velocity, v = 2.00 ±0.20 ms-1
The Manning equation states that:
n =
€
d2 / 3s1/ 2
v= 2.00
2 / 30.0051/ 2
2.00= 0.06 ±Δn
We deal with the errors in the order of the operations involved, powers first followed by the
multiplication and division. In the case of d2/3, we know from the power function rule [F = an;
ΔF = Fn Δaa
] that the uncertainty in (2.0 ±0.3)2/3 is ΔF = (2.0)2/3
2
3
0.3
2.0 = 0.15874. Note
that you can carry as many decimals through the calculations as you fancy, provided the final
result is reported with the correct number of significant figures.
Entering the uncertainty for d2/3 in the Manning equation yields:
n = (1.5874 ±0.15874)s1/2
v
The uncertainty in the other power function, s1/2, is obtained in the same way so that
ΔF = (0.005)1/2 1
2
0.001
0.005 = 0.00707.
Entering this value for s1/2 and the specified uncertainty in v (2.00±0.2) in the Manning equation
yields:
n = (1.5874 ± 0.15874)(0.0707 ± 0.007)2.00 ± 0.2
The uncertainty in n can now be evaluated by using the rule for multiplication and division:
Δn = (1.5874)(0.0707)
(2.0)0.158741.5874
2
+0.0070.0707
2
+0.202.00
2
= 0.009687 =0.01
So we can report the calculated value of n together with its uncertainty Δn, as
Chapter 1: Preliminaries
1.20
n = 0.06 ±0.01
Concluding Remarks
We have just touched on the topics of this chapter sufficient to serve our immediate needs in the
pages to follow. If you would like to explore further such topics as dimensional analysis and
error analysis there are several excellent sources listed in the references for this chapter that you
might like to explore. Meanwhile, we must turn our attention to the application of Newton’s
laws of motion to fluids moving through channels with rigid boundaries.
References
Blatt, F.J., 1989, Principles of Physics, Allyn and Bacon, Boston.
College Physics Hypertextbook: http://www.rwc.uc.edu/koehler/biophys/text.html
University of Guelph, Physics Tutorials: http://www.physics.uoguelph.ca/tutorials/tutorials.html