space robotics guidance, navigation and control challenges · 2 • space manipulators -...
TRANSCRIPT

Space Robotics Guidance, Navigation and Control
Challenges Jurek Sasiadek
Department of Mechanical & Aerospace Engineering
Carleton University Ottawa, Ontario, Canada
1 ICINCO 2012, Rome, Italy, July 2012

2
• Space manipulators - introduction - flexible joint control - flexible link control
• Mobile robots in Space • Flying robots
Presentation Outline
ICINCO 2012, Rome, Italy, July 2012

Manipulators Mobile robots (rovers, autonomous ground Flying and floating robots (UAV and
spacecraft)
3
Space manipulators vs Mobile robots
ICINCO 2012, Rome, Italy, July 2012

Space-based Robots
space robotic manipulators o can perform repetitive and lengthy tasks
with reduced risk and improved performance
o require less infrastructure than manned systems no life support systems
application examples o maintenance, repair, and assembly o spacecraft deployment and retrieval o extravehicular activity support o shuttle inspection 4 ICINCO 2012, Rome, Italy, July 2012

Space-based Robots flexible links and joints o operational control challenges due to
flexible effects, especially in the joints o link and joint flexibility effects introduce
vibrations that can lead to instability when neglected in the control system design
objectives o develop and validate advanced control
systems for flexible joint space robotic manipulators 5 ICINCO 2012, Rome, Italy, July 2012

Space-based Robots unresolved issues
o simple and efficient algorithms that account for practical limitations have yet to be developed
o applicability of existing control strategies to real-time space applications (no gravity, highly limited computational load) needs to be assessed
o performance validation should be done with large square trajectories (flexible effects are more noticeable → greater control challenge)
6 ICINCO 2012, Rome, Italy, July 2012

Space-based Robots
propose 4 control strategies for flexible joint space robots
compare their respective performance while tracking a 12.6 m x 12.6 m square trajectory
further Improvements o extend for robots with
unknown/variable joint stiffness coefficients
7 ICINCO 2012, Rome, Italy, July 2012
8
RMS, SSRMS and SPDM
http://twicsy.com/i/txBFg ICINCO 2012, Rome, Italy, July 2012

9
Remote Manipulator System (RMS)
ICINCO 2012, Rome, Italy, July 2012 www.csa.ca

15.3 m long Weight 408 kg Diameter 38 cm Payload 29,500 kg
10
Remote Manipulator System (RMS) Canadarm1 or Shuttle arm
ICINCO 2012, Rome, Italy, July 2012

MBS SSRMS SPDM
11
Mobile Servicing System
ICINCO 2012, Rome, Italy, July 2012 www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 12
Space Robotic System
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 13
Space Robotic System
www.csa.ca
ICINCO 2012, Rome, Italy, July 2012 14
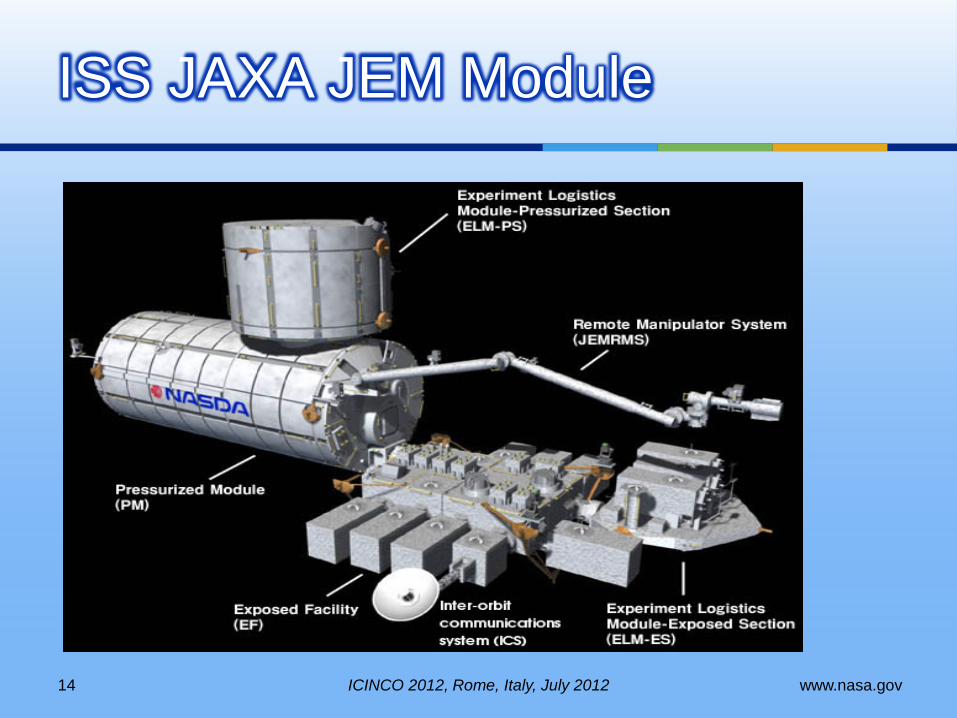
ISS JAXA JEM Module
www.nasa.gov

Technical Specs
ICINCO 2012, Rome, Italy, July 2012 15
Mobile Base System
Mass (approx) 1,450 kg Mass Handling/Transportation Capacity 20,900kg
Degrees of Freedom Fixed
Peak Power (Operational) 825 Watts
Average Power (Keep alive) 365 Watts
Total Length 5.7 m x 4.5 m x 2.9 m
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 16
Mobile Base Platform (MBS)
www.csa.ca
ICINCO 2012, Rome, Italy, July 2012 17
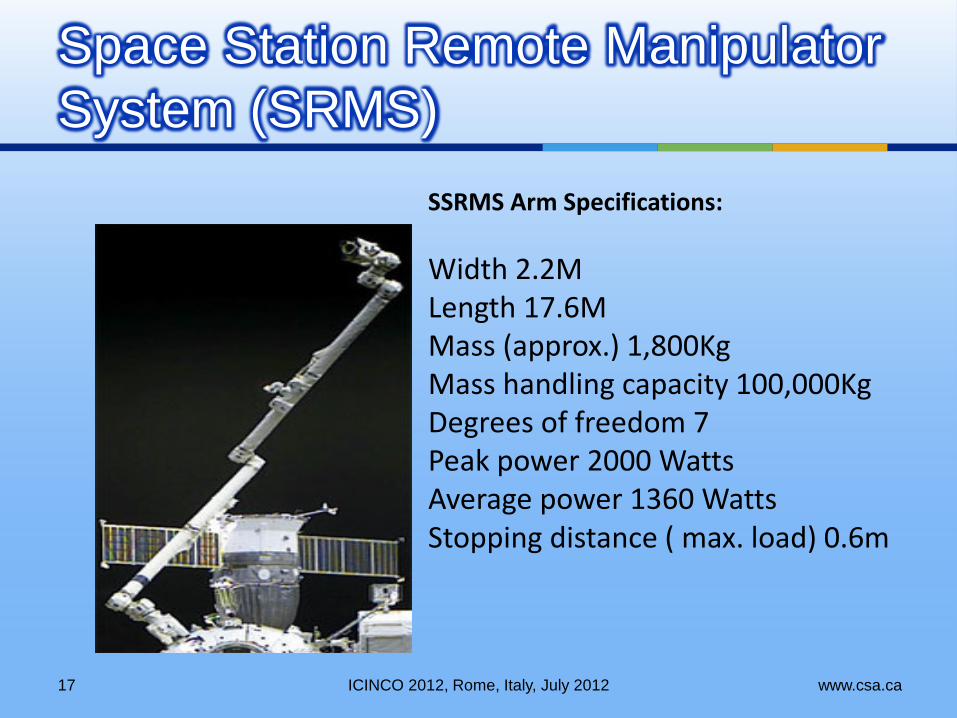
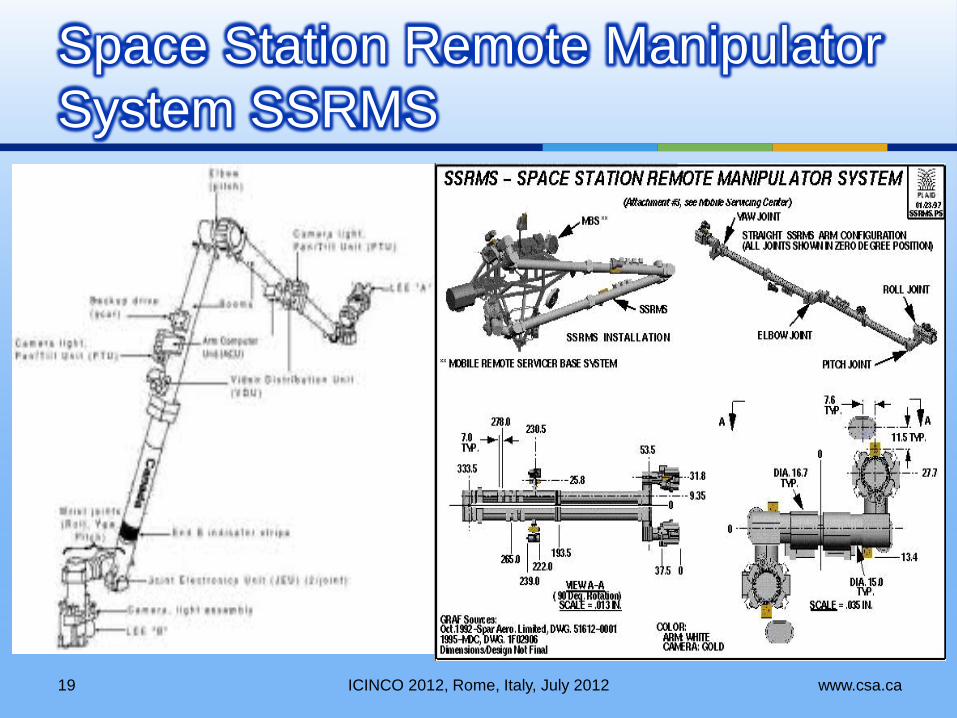
Space Station Remote Manipulator System (SRMS)
SSRMS Arm Specifications: Width 2.2M Length 17.6M Mass (approx.) 1,800Kg Mass handling capacity 100,000Kg Degrees of freedom 7 Peak power 2000 Watts Average power 1360 Watts Stopping distance ( max. load) 0.6m
www.csa.ca
ICINCO 2012, Rome, Italy, July 2012 18
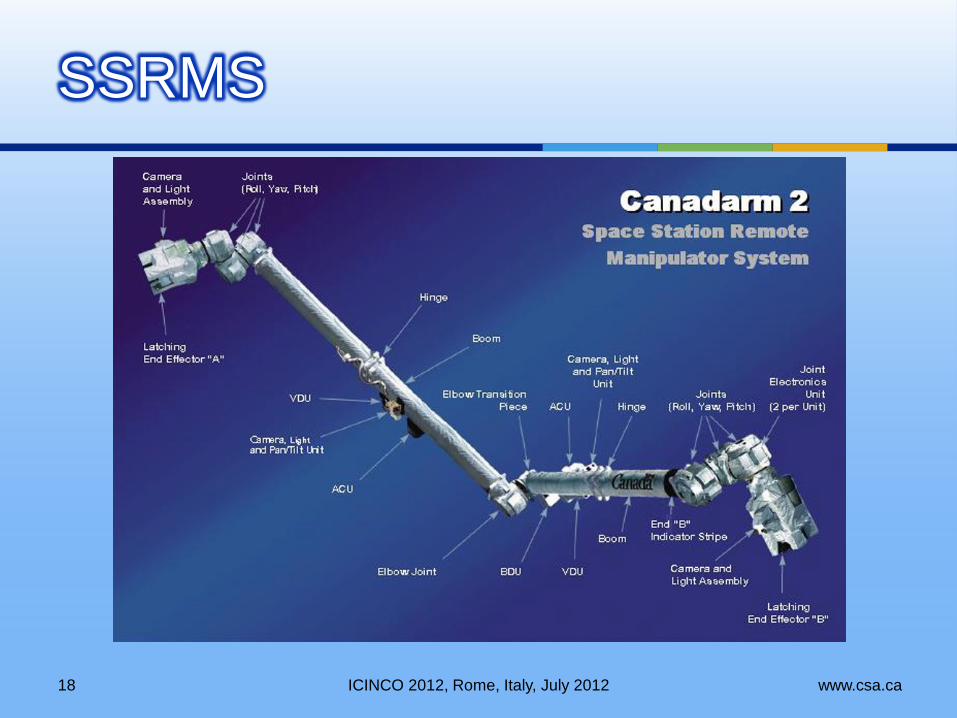
SSRMS
www.csa.ca
ICINCO 2012, Rome, Italy, July 2012 19
Space Station Remote Manipulator System SSRMS
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 20
SSRMS folded
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 21
Special Purpose Dextrous Manipulator (SPDM)
Length 3.5 m
Mass (approx) 1,662 kg
Mass Handling Capacity 600 kg
Degrees of Freedom 15
Peak Power 2000 Watts
Average Power 600 Watts
Stopping Distance (under max. load) 0.15 m
www.csa.gov

ICINCO 2012, Rome, Italy, July 2012 22
SPDM - Dextre
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 23
SPDM
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 24
RMS Robot
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 25
Shuttle Arm (RMS)
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 26
Space Robotics

ICINCO 2012, Rome, Italy, July 2012 27

ICINCO 2012, Rome, Italy, July 2012 28
Space Robotics 3

ICINCO 2012, Rome, Italy, July 2012 29
Satellite retrieval
www.csa.ca

ICINCO 2012, Rome, Italy, July 2012 30
Satellite robot (SPDM Dextre from CSA) – Tumbling Satellite Problem
www.csa.ca

31 ICINCO 2012 Rome, Italy, July 2012
Space Robotic Manipulators • Represent an ideal technology to perform repetitive and
lengthy tasks • Require less infrastructure than humans (such as life
support systems)
Application Examples • Maintenance, repair and assembly • Spacecraft deployment and retrieve • Extravehicular activity support • Shuttle inspection
Context
Image courtesy of ESA

32 ICINCO 2012 Rome, Italy, July 2012
Manipulators • Operational control challenges due to flexible effects,
especially in the joints • Joint flexibility effects introduce vibrations and can lead to
instability when neglected in the control system design
Main Objective • Develop and validate advanced control systems for
flexible joint space robotic manipulators
Context

33
Two-Link Space Robot
ICINCO 2012 Rome, Italy, July 2012 I
Rigid Dynamics qqqCqqMτ ),()( rr +=
where ( ) 21221
22
212
21111 cos2 IIqllllmlmM cccr +++++=
( ) 22212222112 cos IqlllmMM ccrr ++==
222222 IlmM cr +=
and
+−=
0sin),(
1
2122212 q
qqqqllm cr
qqC
34
Two-Link Space Robot
ICINCO 2012 , Rome, Italy, July 2012
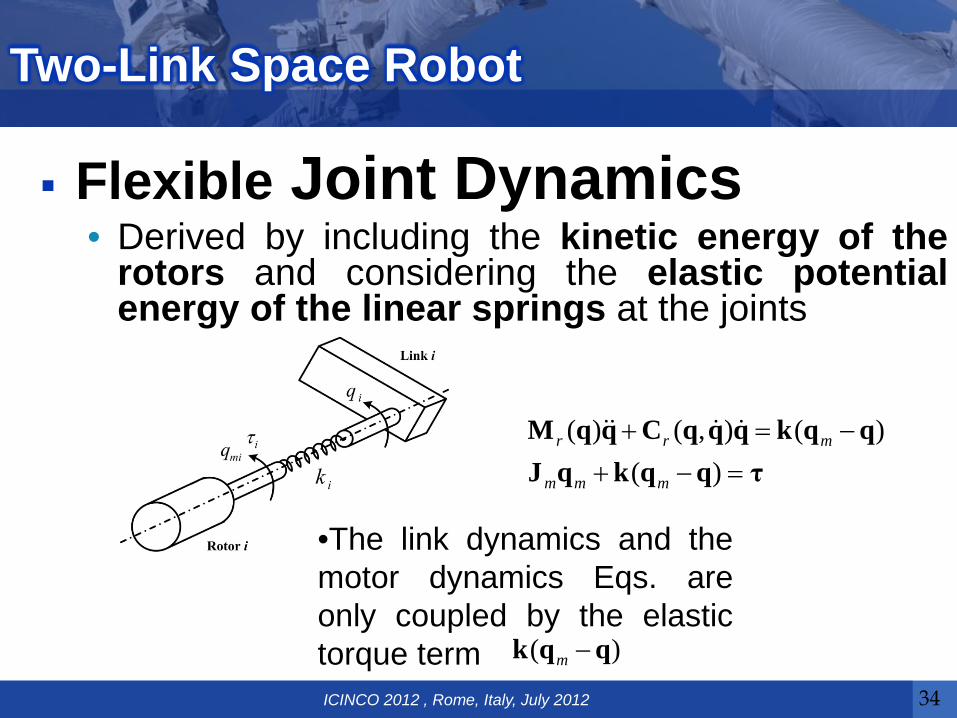
Flexible Joint Dynamics • Derived by including the kinetic energy of the
rotors and considering the elastic potential energy of the linear springs at the joints
τqqkqJqqkqqqCqqM
=−+−=+
)()(),()(
mmm
mrr
)( qqk −m
•The link dynamics and the motor dynamics Eqs. are only coupled by the elastic torque term

35
Flexible Joint Control Survey
ICINCO 2012 , Rome. Italy. July 2012
Flexible Joint Control Categories • Proportional Derivative (Tomei, 1991) • Singular Perturbation-Based (Spong, 1989) • Integral Manifold (Ghorbel and Spong, 1992) • Feedback Linearization (De Luca, 1998, 2005, 2008) • Optimal (Merabet and Gu, 2008) • Adaptive (Slotine, 1987, 1988, 2008) • Simple Adaptive Control (Sasiadek, Ulrich, Barkana, 2009,
2010, 2011, 2012) • Robust (Lee, Yeon, Park and Yim, 2006, 2007) • Nonlinear Backstepping (Brogliato, 1995, 1998) • Fuzzy and Neural Network (Zeman, 1989, 1997) • Iterative (Wang, 1995)

36
Flexible Joint Control Survey
ICINCO 2012, Rome. Italy, July 2012
Unresolved Issues • Simple and efficient algorithms considering practical
limitations are yet to be developed • Applicability of existing control strategies to real-time
space applications (no gravity, highly limited computational load) needs to be assessed
• Performance validation should be done with large square
trajectories (flexible effects are more noticeable → greater control challenge)

37
Compare 4 control strategies for flexible joint space robots • Slotine and Li controller • PD controller • Singular Perturbation-Based controller • Nonlinear Backstepping controller
Compare their respective performance while
tracking a 12.6 m x 12.6 m square trajectory
Advanced Control Strategies
ICINCO 2012, Rome, Italy, July 2012

38
Slotine and Li Control Strategy Slotine J. J. E. and Li W., “On the Adaptive Control of Robot Manipulators,” International Journal of Robotics
Research, Vol. 6, No. 3, pp. 49-59, 1987.
where
Advanced Control Strategies
ICINCO 2012, Rome, Italy, July 2012
sKqqqCqqMτ drrrrr −+= ),()(
)( qqΛqq −+= ccr
)( qqΛqq −+= ccr
rcc qqqqΛqqs −=−−−−= )()(
=dK positive constant gain matrix

39
PD Control Strategy Tomei P., “A Simple PD Controller for Robots with Elastic Joints,” IEEE Transactions on Automatic Control, Vol. 36, No. 10,
pp. 1208-1213, 1991.
where
Advanced Control Strategies
ICINCO 2012, Rome, Italy, July 2012
mdmmcp qKqqKτ −−= )(
cmc qq =
=dK positive constant gain matrix
=pK positive constant gain matrix

40
Singular Perturbation-Based Control Strategy Spong M. W., “Adaptive Control of Flexible Joint Manipulators,” Systems and Control Letters, Vol. 13, pp. 15-21, 1989.
where where
Advanced Control Strategies
ICINCO 2012 , Rome, Italy, July 2012
fs τττ +=
== rs ττ
=vK positive constant gain matrix
)( mvf qqKτ −=
SLI control algorithm for space robots defined earlier

41
Nonlinear Backstepping Control Strategy Brogliato B., Ortega R. and Lozano R., “Global Tracking Controllers for Flexible Joint Manipulators: A Comparative
Study,” Automatica, Vol. 31, No. 7, pp. 941-956, 1995
where
Advanced Control Strategies
ICINCO 2012 , Rome, Italy, July 2012
[ ] )()()(2)(2 qqkssqqqqqJτ −++−−−−−= mmcmmcmmcm
=k joint stiffness matrix
qτkq += −rmc
1
qτkq += −rmc
1
qτkq += −rmc
1
rcc qqqqΛqqs −=−−−−= )()(
Note: The joint acceleration can be obtained by inverting the link dynamics equation and the jerk is obtained by time-differentiating the acceleration

42
Simulation Results
Advanced Control Strategies
ICINCO 2012 , Rome, Italy, July 2012
Slotine and Li PD

43
Advanced Control Strategies
ICINCO 2012 , Rome, Italy, July 2012
Singular Perturbation-Based Nonlinear Backstepping

44
Further Improvement • The Singular Perturbation-Based strategy must be
extended for robots with unknown/variable joint stiffness coefficients
• The idea is to replace the rigid term (SLI) with an adaptive control algorithm
• As a first step, a novel model reference adaptive control
(MRAC) scheme for rigid joint space robots is presented
Novel Adaptive Control Scheme
ICINCO 2012, Rome, Italy, July 2012
fs τττ +=

45
Adaptive Jacobian Scheme
where
Novel Adaptive Control Scheme
ICINCO 2012, Rome, Italy, July 2012
+
=
y
xd
y
xp
T
ee
tee
t
)()()( KKqJτ
=)(qJ Jacobian matrix
[ ] ( ) ( )[ ]TrefrefT
yx yyxxee −−=
[ ] ( ) ( )[ ]TrefrefT
yx yyxxee −−=
)cos(cos 21211 qqlqlx ++=
)sin(sin 21211 qqlqly ++=
22
2
2 nn
n
c
ref
c
ref
ssyy
xx
ωζωω
++==
46
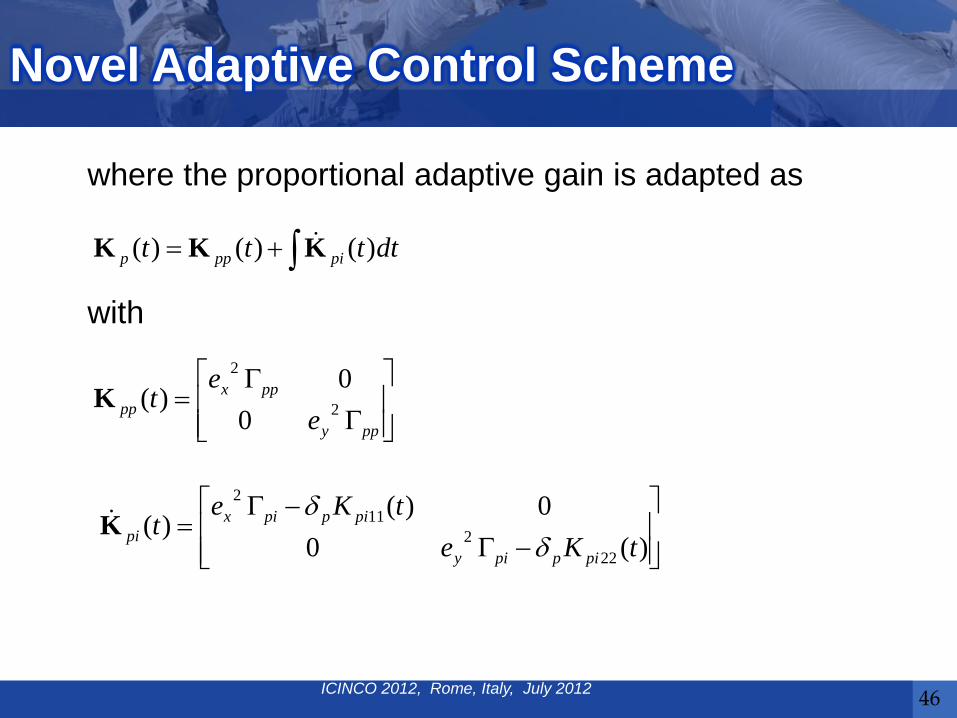
where the proportional adaptive gain is adapted as with
Novel Adaptive Control Scheme
ICINCO 2012, Rome, Italy, July 2012
∫+= dtttt pippp )()()( KKK
ΓΓ
=ppy
ppxpp e
et 2
2
00
)(K
−Γ−Γ
=)(0
0)()(
222
112
tKetKe
tpippiy
pippixpi δ
δK

47
Simulation Results
Novel Adaptive Control Scheme
ICINCO 2012, Rome, Italy, July 2012

Viking Lander Missions Pathfinder/Sojourner Mission (Pathfinder
landed July 4-th, 1997) Spirit / Opportunity Mission Curiosity Mission (will land on August 6,
2012)
ICINCO 2012, Rome, Italy, July 2012 48
Space Robotic Missions to Mars

ICINCO 2012, Rome, Italy, July 2012 49
Mars robotic missions
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 50
Viking Lander Missions (Orbiter 1 and Orbiter 2)
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 51
Phoenix Lander
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 52
“Spirit”/’Opportunity” and “Pathfinder”/ “Sojourner” Rovers
www.nasa.jpl.gov

ICINCO 2012, Rome, Italy, July 2012 53
NASA “Spirit” Rover itinerary
www.nasa.jpl.gov

ICINCO 2012, Rome, Italy, July 2012 54
NASA Mars Rover Opportunity Mission image taken between Dec. 21, 2011, and May 8, 2012
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 55
Image taken by NASA “Opportunity” robot
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 56
Image taken by “Opportunity” robot
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 57
Images taken by Opportunity robot
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 58
Space Robots (Phoenix lander and Curiosity mobile robot)
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 59
“Curiosity” Mars Rover
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 60
Curiosity landing site

ICINCO 2012, Rome, Italy, July 2012 61
Mobile space robots design 2
www.nasa.gov

ICINCO 2012, Rome, Italy, July 2012 62
“Curiosity”, “Spirit” and “Sojourner”
www.nasa.gov

Guidance, Navigation and Control
Autonomous robot
Outdoor navigation
Structured environment
Unstructured environment
Indoor navigation
Structured environment
63 ICINCO 2012, Rome, Italy, July 2012

Mapping
static
dynamic
Mapping
local
global
64 ICINCO 2012, Rome, Italy, July 2012

Data association
Computational constraints
Local versus global Mapping
metric
probabilistic
topological
connectivity points
65 ICINCO 2012, Rome, Italy, July 2012
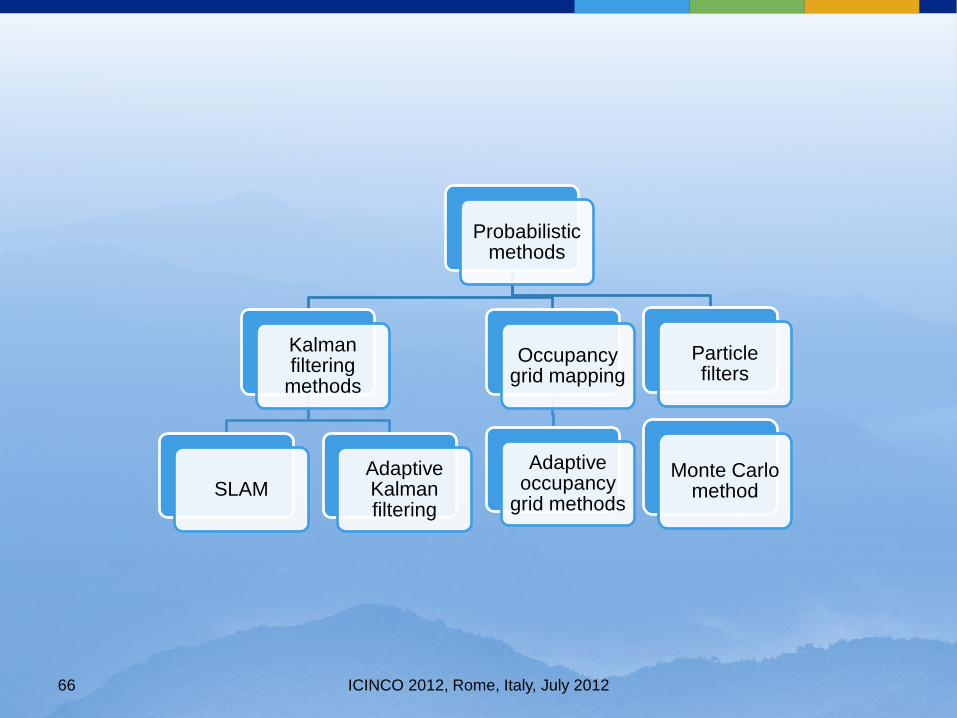
Probabilistic methods
Kalman filtering
methods
SLAM Adaptive Kalman filtering
Occupancy grid mapping
Adaptive occupancy
grid methods
Particle filters
Monte Carlo method
66 ICINCO 2012, Rome, Italy, July 2012

Sensor fusion is a measurement integration procedure
Sensor fusion is one of the most important elements of robot GNC system
ICINCO 2012, Rome, Italy, July 2012 67
Sensor/Data Fusion

Sensor Fusion
Sensor Fusion
Probabilistic methods
Least square methods
Intelligent methods
68 ICINCO 2012, Rome, Italy, July 2012

Collision avoidance
Cluttered environment
Static
Proportional navigation
Constant angle navigation
Dynamic
Mapping and active collision
avoidance
69 ICINCO 2012, Rome, Italy, July 2012

Trajectory Tracking
Sensors
Coordinate frames
Localization Positioning
Relative
Internal External
Absolute
Sensor fusion
70 ICINCO 2012, Rome, Italy, July 2012

Gate passage problem Navigation with vision system
ICINCO 2012, Rome, Italy, July 2012 71
Mobile robot navigation through two identifiable points

ARGO 6x6 Conquest (Ontario Drive & Gear Limited Inc )
6 wheel drive 4 cycle engine with 200 HP 617 cc and load capacity of 700 lbs electronic ignition
72 ICINCO 2012, Rome, Italy, July 2012

Equipped Sensors
NovAtel GPS, MicroStrain inertial sensor, Built in wheel odometry, LMS-221 laser scanner (SICK)
1.4
73 ICINCO 2012, Rome, Italy, July 2012

Gate Through Navigation
Location (GPS) Heading (INS)
74 ICINCO 2012, Rome.Italy, July 2012 Jerzy Sasiadek

Gate Recognition
75 ICINCO 2012, Rome, Italy, July 2012

Solution for Gate Through Navigation
Zones of Gate Area
76 ICINCO 2012, Rome. Italy, July 2012

Visibilities of Gate Segments
77

A full scan of 180°provides 361 range values
(indexed according to a scanning angle)
20
40
60
80
30
60
90
120
150
180 0
Laser Sensor Scanning
78 ICINCO 2012, Rome, Italy, July 2012

Flowchart of gate navigation module ARGO Position
from GPS/INS
Scanning Data from LMS
Raw Map Building
Map Filtering
Gate segments Fitting
Create Current Signature
Standard Signatures
(2-norm)<e
Localization
Gate through Control
Model Start
Mission Abort
Y
N
Y
N
Data reading
Unexpected Error Check
79 ICINCO 2012

Control System
a
c
O
X
Y
CT PGATE
PENRTE
PGATE
PENRTE
80 ICINCO 2012, Rome, Italy, July 2012

Parking Control / Astolfi-controller / cos/ sin //
d dt Vd dt Vd dt
ρ αα α ρ ωψ ω
= −= −= −
1 2
KVK K
ρρω α ψ=
= +
or
1 2
2 2
(arctan( ) ) ( )2
K
K K
V x yyx
ρ
πω θ θ
= +
= − + −
In x-y coordinate
81 ICINCO 2012, Rome, Italy, July 2012

Controller for Gate Through Navigation
/ sin sin( )/ sin cos( ) //
d dt Vd dt Vd dt
ρ ψ α ψα ψ α ψ ρ ωψ ω
= − += + −= −
After linearization:
1 2
1 2
//
d dt K K Kd dt K K
ρα α ψ ψ
ψ α ψ
= − − +
= − −
The control law is: 1 2K Kω α ψ= − −
The gains are experimentally set to : 1 20.1; 0.9; 0.4K K Kρ = = = −
α is estimated online by sensing .
82 ICINCO 2012, Rome, Italy, July 2012

Navigation
Experimental results
25 30 35 40 45 50 55 60-10
-5
0
5
10
15
20
25
30
X (meter)
Y (m
eter
)
ARGO Trajectory
Start point
End point
83 ICINCO 2012, Rome, Italy, July 2012

Gate Through Navigation
Experimental results
24 26 28 30 32 34 36 38 400
2
4
6
8
10
12
14
16
18
20
X (meter)
Y (m
eter
)
ARGO
GATE
84 ICINCO 2012, Rome, Italy, July 2012

Gate Through Navigation Experimental results
85 ICINCO 2012, Rome, Italy, July 2012

Experimental results 2
Video 3 Video 4
86 ICINCO 2012, Rome, Italy, July 2012

Particle Filtering to estimate the robot pose: o measurements (scanning) from the
SICK sensor are compared with the map scanning results
robot pose estimation by particle filtering is suitable for this problem: o a set of hypotheses (particles) about
the robot’s pose or about the locations of the objects around the robot are maintained
87 ICINCO 2012, Rome, Italy, July 2012

Particle Filtering
particle filtering algorithm is divided into four steps:
o initial sampling; o prediction; o update; o re-sampling
88 ICINCO 2012, Rome, Italy, July 2012

Simulations
The robot running along the desired patrolling path is simulated. It is assumed that the robot has the pose information from GPS/Odometry sensor and the LRS supplies the scan data. Also, the a priori map of the environment is supposed to be known and is used to obtain the reference scan data. The robot starts from a point in the bottom edge and runs in anti-clockwise direction.
1 2 3 4 56
7
8
910111213
4.1
89 ICINCO 2012, Rome, Italy, July 2012

Localization with Particle Filtering
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
45
50
X (meter)
Y (m
eter
)
The distribution of particles
Simulation of particle filtering – initial distribution
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
45
50
X (meter)
Y (m
eter
)
The distribution of particles
Simulation of particle filtering – re-sampling
90 ICINCO 2012, Rome, Italy, July 2012

Localization with Particle Filtering
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
45
50
X (meter)
Y (m
eter
)
The distribution of particles
Simulation of particle filtering – re-sampling
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
45
50
X (meter)
Y (m
eter
)
The distribution of particles
Simulation of particle filtering – re-sampling
91 ICINCO 2012, Rome, Italy, July 2012

Mobile Robot Navigation Using Vision objective o achieve accurate rover navigation
in crowded environments o accurate positioning, localization,
and mapping o fusion of odometry, inertial
navigation unit (INU), and vision data,
92 ICINCO 2012, Rome, Italy, July 2012
Robot Navigation Using Vision cameras are carried by robots o can cameras be used for accurate
navigation?
robot position and pose come from rotation and translation of fixed camera
key initial operation o identification and localization of
points-of-interest
93 ICINCO 2012, Rome, Italy, July 2012

ICINCO 2012, Rome, Italy, July 2012 94
Navigation with vision system
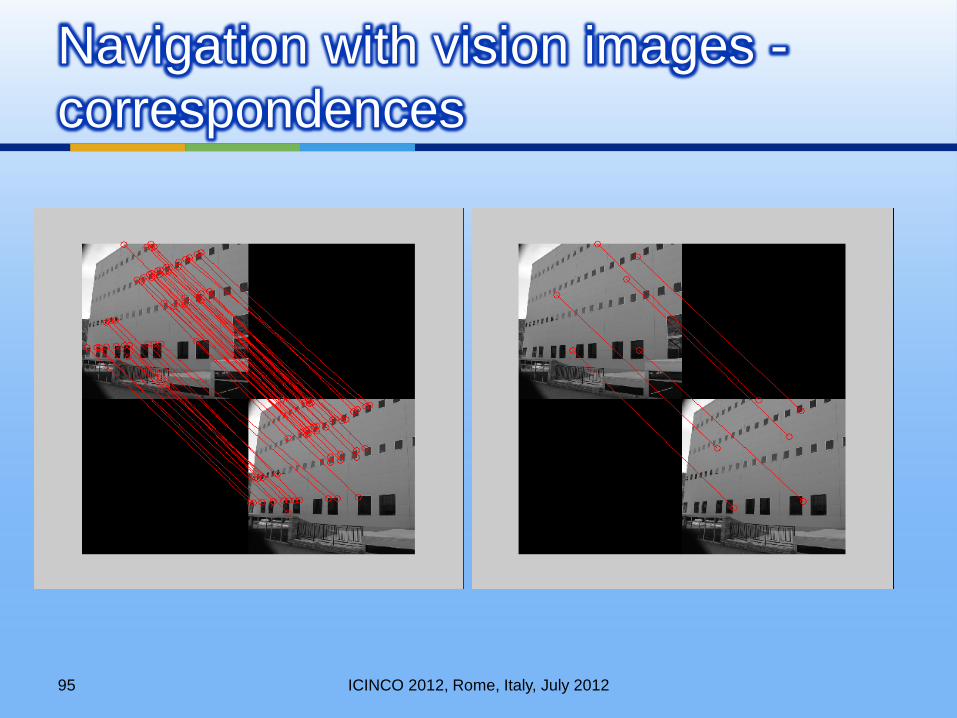
ICINCO 2012, Rome, Italy, July 2012 95
Navigation with vision images -correspondences

UAV Navigation Using Vision
one camera o motion can be derived from
geometrical considerations if camera view is of points on a plane
two cameras o image depth can be derived o rotation and translation can be
derived using iterative closest point algorithm
96 ICINCO 2012, Rome, Italy, July 2012
Autonomous Vehicle Using SLAM Objective o to develop an efficient navigation
method for autonomous robots based on SLAM and Rao-Blackwellised particle filtering with the following considerations • Data association • Computational complexity • Non-linear motion and sensor
models 97 ICINCO 2012, Rome, Italy, July 2012
Simultaneous Localization and Mapping
Basics • what does the
environment look like? • where am I? • where am I supposed
to go? • how can I get there?
98 ICINCO 2012, Rome, Italy, July 2012

0 500 1000 1500 2000 2500 3000 3500 4000 45000
10
20
30
40
50
60
70
80
90
100EKF-SLAM with Nom-Gaussian Implication
Time (s)
Estim
ated
pos
ition
erro
rA Comparison between EKF-SLAM and Fast-SLAM
0 500 1000 1500 2000 2500 3000 3500 4000 45000
10
20
30
40
50
60
70
80
90
100EKF-SLAM with Nom-Gaussian Implication
Time (s)
Estim
ated
pos
ition
erro
r
0 500 1000 1500 2000 2500 3000 3500 4000 45000
0.2
0.4
0.6
0.8
1
1.2
1.4Fast-SLAM with Non-Gaussian Implication
Time (s)
Pos
ition
est
imat
ion
erro
r
Time [s] Time [s]
Posi
tion
erro
r alo
ng y
axi
s [m
]
x direction [m]
y di
rect
ion
[m]
y di
rect
ion
[m]
x direction [m]
EKF-SLAM with Gaussian Assumption
Fast-SLAM with Non-Gaussian Assumption
Posi
tion
erro
r alo
ng y
axi
s [m
]
99 ICINCO 2012, Rome, Italy, July 2012

0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
x direction
y d
irection
EKF Performance for multiple objects
True PathDead ReckoningEstimated Path (EKF)
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
x direction
y d
irection
RBPF performance for multiple objects
True PathDead ReckoningEstimated Path (RBPF)
x direction [m] x direction [m]
y di
rect
ion
[m]
y di
rect
ion
[m]
EKF-SLAM FAST-SLAM
FAST-SLAM Vs. EKF-SLAM in a Dense Map for Multiple Objects (750 Landmarks)
100 ICINCO 2012, Rome, Italy, July 2012

0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Detectable landmarks
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
True map
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Detectable landmarks
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
x direction
y di
rect
ion
Mapping multipleobjects by EKF
x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x
x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x
x x x x
x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x
x x x x
x x x x x x x x x x x x x x
x x x
x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Mapping multiple objects by RBPF
x x x
x
x
x
x x x x x x x x x x x x x
x x
x
x
x x x x x x
x x x x x x x x x x x x x x x
x
x
x x
x x x x x x x x x x x x x x x x
x x x x
x x x x x x x x
x x x x
x x x x x x
x x x x x x x x x x x x
x
x x x x x x x x x x x x x x x x x
x x x x x x x x x
x
x
x x x x x x x x x
x x
x x x x
x x
x x
x
x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x
x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x x x x x x x
x x
x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
Fast-SLAM vs. EKF-SLAM in a Dense Map for Multiple Objects (750 Landmarks)
101 ICINCO 2012, Rome, Italy, July 2012

0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
True map
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Detectable landmarks
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
x direction
y di
rect
ion
Mapping multipleobjects by EKF
x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x
x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x
x x x x
x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x
x x x x
x x x x x x x x x x x x x x
x x x
x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Mapping multiple objects by RBPF
x x x
x
x
x
x x x x x x x x x x x x x
x x
x
x
x x x x x x
x x x x x x x x x x x x x x x
x
x
x x
x x x x x x x x x x x x x x x x
x x x x
x x x x x x x x
x x x x
x x x x x x
x x x x x x x x x x x x
x
x x x x x x x x x x x x x x x x x
x x x x x x x x x
x
x
x x x x x x x x x
x x
x x x x
x x
x x
x
x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x
x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x
x x x x
x x
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
x x x x x x
x x x x x x x x x
x x
x x x x x x x x x x x x x x x x x x x x x x
x x x x x x x x x x x x x x x x x x
FAST-SLAM Vs. EKF-SLAM in a Dense Map for Multiple Objects (750 Landmarks)
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
y di
rect
ion
x direction
Detectable landmarks
102 ICINCO 2012, Rome, Italy, July 2012

Space robotics includes many control challenges;
Present applications of robots in Space are not fully autonomous;
Full autonomous operations should be our objective.
ICINCO 2012, Rome, Italy, July 2012 103
Conclusions

ICINCO 2012, Rome, Italy, July 2012 104
Follow your Curiosity!

Images courtesy of Canadian Space Agency and NASA or from sites:
www. csa.ca www.nasa.gov www.oldrobots.com
ICINCO 2012, Rome, Italy, July 2012 105
Acknowledgement

Thank you ! Questions?
106 ICINCO 2012, Rome, Italy, July 2012