statics and dynamics ch 1
TRANSCRIPT

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 1/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.11
Chapter 1: Introduction to Newton’s Laws
1-1 Governing Equations for Dynamics and Statics
Prior to Sir Isaac Newton’s formulation of his three famous laws in 1687, scientists were notcompletely successful in explaining the motion or lack of motion of bodies. Newton’s laws
allow us to be successful in both areas as long as the velocities are much less than the speed of
light and the bodies are much larger than individual atoms. In such extreme cases, Einstein’srelativistic mechanics, published in 1905, and other complex theories of physics would have to
be used. Therefore, in the vast majority of cases, Newton’s laws serve perfectly well as the
foundation for applications of mechanics to practical situations. Newton’s second law states that
the sum of all forces acting on a body equals the product of its mass times its acceleration.
∑ G F = m a (1.1)
This governing equation will be the starting point for our study of Dynamics. Later we will seethat the acceleration in this equation must be the acceleration of the center of gravity ( CG) of the
body, thus the subscript “G” on the acceleration. This equation will be integrated in two special
ways to yield the governing equations two additional methods, i.e. the work-energy method (Chapter 9) or the impulse-momentum method (Chapter 10). When the body is restrained so
that it cannot move, or at least has a zero acceleration (i.e., constant velocity), Newton’s first law
is the result. This simplified version of the second law says simply that if the sum of all forces
acting on a body equals zero, the body is either (a) in static equilibrium, i.e. has no motion
at all, or (b) moves with constant velocity. In either case, equation (1.1) reduces to
∑F = 0 (1.2)
which is Newton’s first law. It is simply a special case of the second law and it forms thestarting point for our study of Statics. These two simple but important laws clearly show the
close relationship of Dynamics and Statics. These equations refer to lack of motion or motion
Statics vs. Dynamics
photo courtesy of: www.la-magic.com/ladyann/space/shuttle.html

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 2/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.12
along a straight or curved line, motion referred to as translation, which we will define more
precisely later. We will show how to modify these equations to describe rotational motion orlack of such rotation as follows:
α ∑ G G M = I (1.3)
and
∑ M = 0 (1.4)
The terms in these equations will be defined later as required, but for now, equations (1.3 – 1.4)can be interpreted as Newton’s Second and First Laws for rotational motion or lack of such
motion, respectively. Motion involving both translation and rotation is referred to as general
motion and will require satisfaction of the dynamic form of both the translational and rotationalequations (1.1 and 1.3). Static equilibrium implies the lack of all motion and therefore requires
that the zero forms of both equations (1.2 and 1.4) are satisfied. You will see that pure
translation requires satisfaction of the dynamic form of the translational equation (1.1) along
with the zero form (static form) of the rotational equation (1.4). Conversely, you will see that pure rotational motion about the center of gravity of a rigid body requires satisfaction of the
opposite forms of the equations (1.2 and 1.3).
Newton also developed a third law that is equally important in Dynamics and in Statics. This
states that when two separate bodies contact each other or attract each other, the
interacting forces are equal in magnitude and opposite in direction. You can feel this easily by pushing two fingers together or linking them and pulling on them.
You may be surprised to learn that the foundation for this integrated course has now been statedin terms of equations (1.1 – 1.4) comprising the static form (zero form) and the dynamic form
(nonzero form) of Newton’s Second Law for translation and rotation. We still need to define the
terms in the rotational equations. We also must define the physical point on the body known as
the “center of gravity”, and will do so very soon.
In Dynamics the governing kinetics equations introduced above will be supplemented with
additional equations of kinematics which describe the relationships between translational and
rotational motions and how they relate to time and position . In Dynamics we will sometimes
use integrated forms of Newton’s Second Law to formulate problems in terms of Work-
Energy and/or Impulse-Momentum principles. However, with only a very few exceptions, Newton’s Second Laws for translation and rotation can be used for any static or dynamic
situation. In some cases, however, the other methods may lead to simpler formulations and
quicker solutions.
1-2 Force of Gravity
Newton formulated his universal law of gravitation when he discovered that any two masses
have equal and opposite attractive forces on each other. This is actually a quantitative version of
his third law. Our weight is simply the attractive force that the mass of the earth has on our bodymass. As discussed in the introduction, weight is a force and it will be measured in N or lb.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 3/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.13
Newton’s law of gravitation states that the attractive force F between two stationary masses m1 and m2 whose centers are a
distance r apart as shown at right is given by
(1.5)
where the gravitational constant G is given by
G = 6.673 x 10-11
m3/(kg-sec
2) in SI, and G = 3.439 x 10
-8 ft
4/(lb-sec
4) in USC.
Since the earth is notspherical (radius larger
at equator than poles),
the distance r varieswith latitude, as well as
elevation. Since theearth rotates, there is a
slight tendency for bodies to be thrown off
the surface due to this
rotation. This effectalso varies from
maximum at the equator
to minimum at the poles.Therefore, the total
effective interactiveforce between any body
and the earth is a
function of position(latitude and elevation).
So the measured weight of any body is maximized at the poles and minimized at the equator.
Since weight is also defined as mass times the so called “acceleration of gravity”, g , themagnitude of g also varies in the same way as weight. The chart in Figure 1.1 summarizes the
acceleration of gravity at sea level at different locations on the earth. If the earth did not rotate,
the curve with higher values would apply. The effect of earth’s rotation is included in the lowercurve. In this course, we will always assume an average value of g = 9.81 m/s
2 in the SI system
or 32.2 ft/s2 in the USC system, unless a different value can be justified by additional given
information. Given the values of g at the equator and the poles for a nonrotating earth in
Figure 1.1 and the mass of the earth = 5.976 x 1024
kg, find the earth’s radius at the equator
and at the poles.
F = (G) (m1 m2 )/( r
2
)
Figure 1.1 “Acceleration” of Gravity. (from Meriam & Kraige)
m1
F m2
r
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 4/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.14
1-3 Free Body Diagrams and Kinetic Diagrams
The most important step in formulating and solving dynamics and statics problems is to draw
simple sketches that represent the two sides of the equation stating Newton’s second law.
On the left hand side, we need to represent all forces acting on the body so they can be summed.
The sketch that shows the body and all known and unknown forces acting on it is called the freebody diagram (FBD). The magnitude and direction of known forces are shown. Unknown
forces are shown with an assumed direction and an identifying name. The term free simply
means the body has been cut free from all supports or connections to other bodies and thoseunknown reaction or connection forces are shown with names and directions as they are known
to act or are assumed to act on the body. If a support prevents motion in a particular direction,
there is a reaction force opposite to that direction. The kinetic diagram (KD) is drawn torepresent the right hand side of Newton’s second law when modeling a dynamic condition. It
shows the magnitude and directions of known accelerations or the assumed magnitudes and
identifying names of unknown accelerations. In static equilibrium, the kinetic diagram is simplya zero and can be omitted.
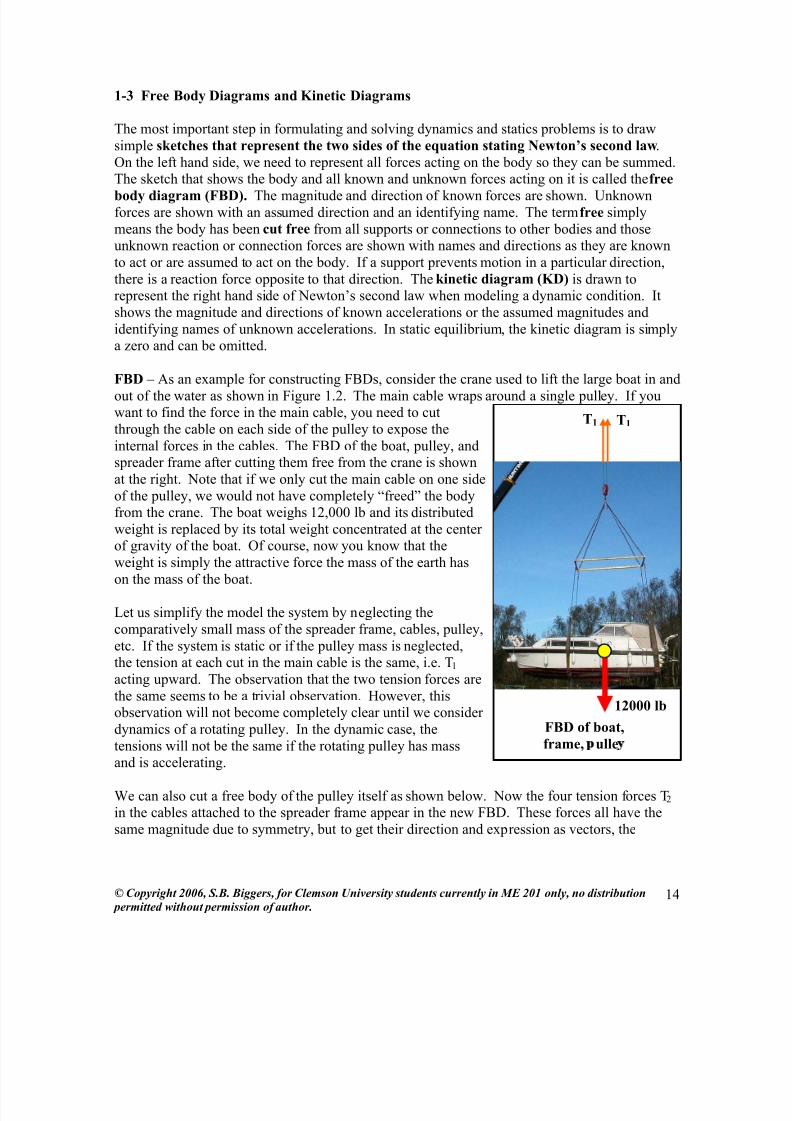
FBD – As an example for constructing FBDs, consider the crane used to lift the large boat in and
out of the water as shown in Figure 1.2. The main cable wraps around a single pulley. If youwant to find the force in the main cable, you need to cut
through the cable on each side of the pulley to expose the
internal forces in the cables. The FBD of the boat, pulley, andspreader frame after cutting them free from the crane is shown
at the right. Note that if we only cut the main cable on one side
of the pulley, we would not have completely “freed” the bodyfrom the crane. The boat weighs 12,000 lb and its distributed
weight is replaced by its total weight concentrated at the centerof gravity of the boat. Of course, now you know that the
weight is simply the attractive force the mass of the earth has
on the mass of the boat.
Let us simplify the model the system by neglecting the
comparatively small mass of the spreader frame, cables, pulley,
etc. If the system is static or if the pulley mass is neglected,the tension at each cut in the main cable is the same, i.e. T1
acting upward. The observation that the two tension forces are
the same seems to be a trivial observation. However, thisobservation will not become completely clear until we consider
dynamics of a rotating pulley. In the dynamic case, the
tensions will not be the same if the rotating pulley has massand is accelerating.
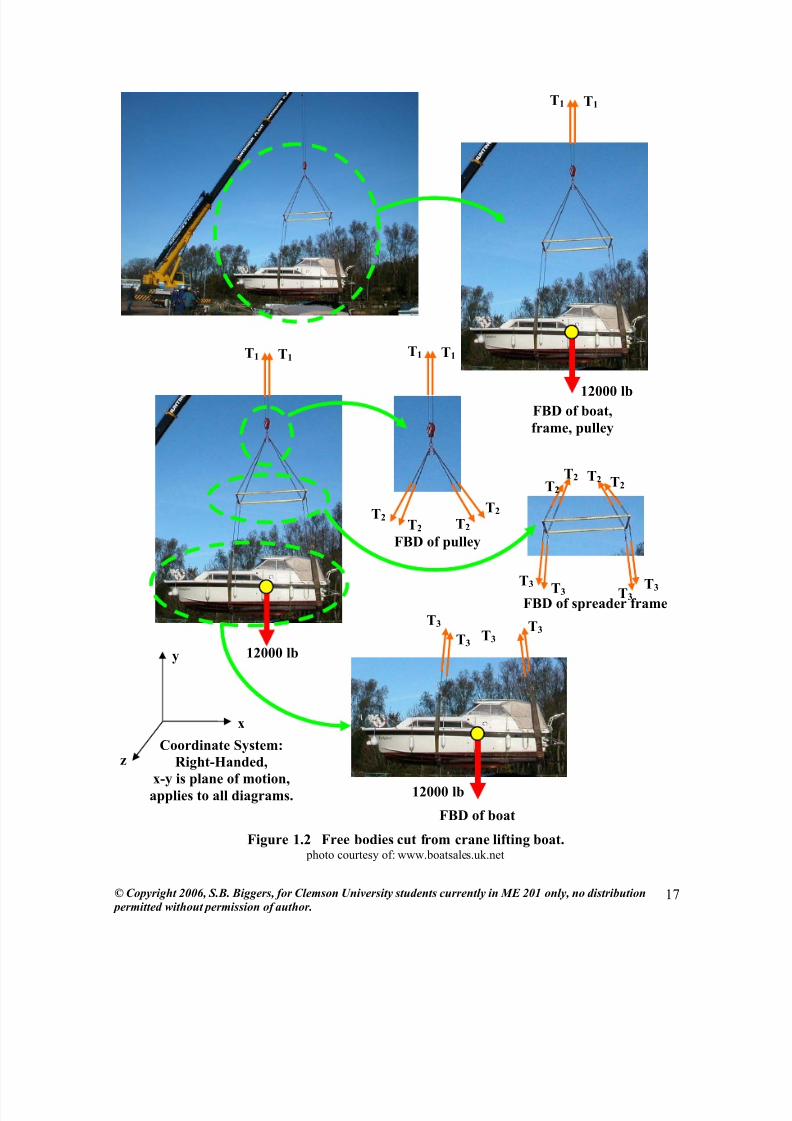
We can also cut a free body of the pulley itself as shown below. Now the four tension forces T2 in the cables attached to the spreader frame appear in the new FBD. These forces all have the
same magnitude due to symmetry, but to get their direction and expression as vectors, the
T1 T1
FBD of boat,
frame, ulle
12000 lb

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 5/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.15
geometry of the spreader frame is needed. We will return to this
problem in Chapter 5 after discussing ways to define vectors in 3-D space in the Chapter 2.
Next, we can cut a free body of only the spreader frame as shown.
Now the four equal tension forces T3 in the nearly vertical strapssurrounding the boat appear in the new FBD. Finally, the FBD of
the boat alone is shown in Figure 1.2 as supported by the T3 forces
in the straps.
Note that in all cases, tension forces “pull” on the body on which
they act. Internal forces on either side of a cut are always equal inmagnitude and opposite in direction (Newton’s Third Law). It is
very important to note that the internal forces are not shown on a
FBD unless there has been a cut made in the support (cable in thisinstance) on that particular FBD. Then the internal force is shown
as it acts on the cut surface. There are many other FBDs thatcould be cut and drawn from the original photo and later we will
do some of these. It is a good practice to actually indicate on theoriginal body exactly where the FBD is being cut free. This has
been done with the dashed green lines on the photo in Figure 1.2.
The FBD is only what is inside the dashed line and internal forcesare shown only where the dashed line cuts through a supporting
element. Your instructor will ask you to practice drawing FBDs
for a number of situations. You will be expected to do thiscorrectly as the first step in formulating the governing equations
using Newton’s Second Law for dynamics or statics. You will also be given some FBDs that
are incomplete or include mistakes that students often make and you will be asked to find and
correct the mistakes.
A complete FBD shows:
• A simple sketch of the body that has been cut free and all forces acting on that particular body including:
o The weight, located at the CG, with magnitude and direction shown
o The magnitude and direction of any other known forces tending to cause, restrict,
or prevent motion
o Any unknown forces in members that were cut to free the body but tending to
cause, restrict, or prevent motion – an assumed direction and a unique name
should be shown.
• A coordinate system identifying directions used in vector expressions
• Important geometric information needed to solve the problem. If this information is tooextensive, sometimes it is best to show it on a separate diagram.
KD – The kinetic diagram is much simpler than the FBD. It represents the termG
m a on the
right hand side of Newton’s Second Law for forces and translation, and the term α G
for
T1 T1
T2T2 T2
T2
FBD of pulley
T2
T2 T2 T2
T3T3T3
T3
FBD of spreaderframe

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 6/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.16
moments and rotation (to be examined later). Sometimes the KD is so simple students bypass
drawing it because it seems to be trivial. However, this tendency must be avoided in formulatingthe governing equations for dynamics. Drawing the KD forces you to make a conscious decision
about which mass or masses you are considering and which ones are actually accelerating. You
are also forced to make a first estimate or assumption of the direction(s) of the acceleration(s)
and to show the point to which the acceleration applies. It aids in making observations aboutrelationships of motions of different points on the body and in recording any assumptions about
these accelerations.
A complete KD shows:
• A simple sketch of the body under consideration and the accelerations that particular body may be experiencing including:
o The linear acceleration vector at the CG with the given, assumed, or observeddirection(s) shown and the vector or vector components named.
o The angular acceleration of the body with the given, assumed, or observed
direction(s) shown and the vector or vector component(s) named. In cases of 2-D
motion, only a vector component normal to the plane of motion will be present.• Any support or connection to another element that restricts the motion in any way, be thatzero motion or nonzero motion. (Note this is quite different from the FBD which must be
shown free from all supports, and shows forces not motion.)
Some students attempt to combine the FBD and KD into a single diagram. This should never
be done. Some examples of FBDs and KDs a successful student would create for the boatlifting problem are shown in Figure 1.3. You will be expected to do this correctly as the
second step in formulating the governing equations using Newton’s Second Law for
dynamics.
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 7/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.17
T1 T1
T2T2 T2
T2
T2
T2 T2 T2
T3T3T3
T3
T1 T1
T1 T1
12000 lb
12000 lb
T3
T3
T3
T3
12000 lb
FBD of boat
FBD of spreader frame
FBD of pulley
FBD of boat,
frame, pulley
Figure 1.2 Free bodies cut from crane lifting boat. photo courtesy of: www.boatsales.uk.net
Coordinate System:
Right-Handed,
x-y is plane of motion,
applies to all diagrams.
y
x
z

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 8/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.18
FBD of pulley
Figure 1.3 Student FBDs and KDs.
KD of pulley
KD of boat,
frame, pulley
FBD of boat,
frame, pulley
KD of boatFBD of boat
Coord
System
FBD of frame KD of frame
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 9/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.19
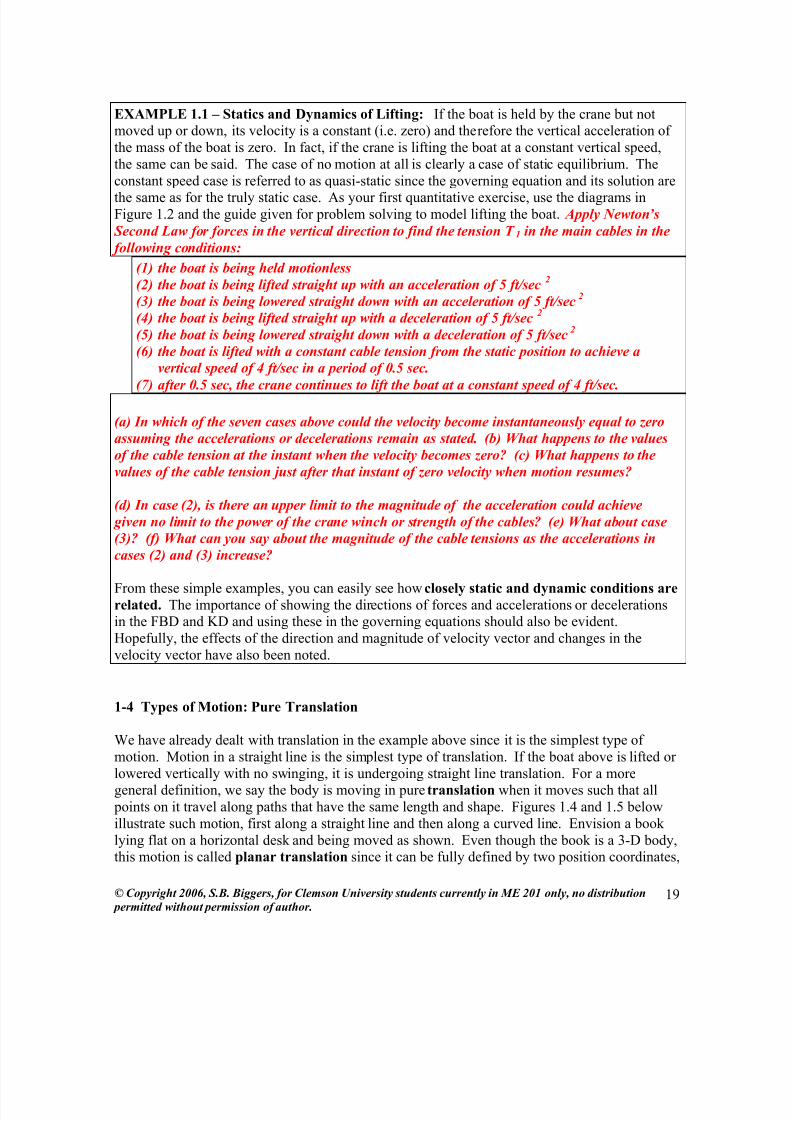
EXAMPLE 1.1 – Statics and Dynamics of Lifting: If the boat is held by the crane but notmoved up or down, its velocity is a constant (i.e. zero) and therefore the vertical acceleration of
the mass of the boat is zero. In fact, if the crane is lifting the boat at a constant vertical speed,
the same can be said. The case of no motion at all is clearly a case of static equilibrium. The
constant speed case is referred to as quasi-static since the governing equation and its solution arethe same as for the truly static case. As your first quantitative exercise, use the diagrams in
Figure 1.2 and the guide given for problem solving to model lifting the boat. Apply Newton’s
Second Law for forces in the vertical direction to find the tension T 1 in the main cables in the
following conditions:
(1) the boat is being held motionless
(2) the boat is being lifted straight up with an acceleration of 5 ft/sec2
(3) the boat is being lowered straight down with an acceleration of 5 ft/sec2
(4) the boat is being lifted straight up with a deceleration of 5 ft/sec2
(5) the boat is being lowered straight down with a deceleration of 5 ft/sec2
(6) the boat is lifted with a constant cable tension from the static position to achieve a
vertical speed of 4 ft/sec in a period of 0.5 sec.(7) after 0.5 sec, the crane continues to lift the boat at a constant speed of 4 ft/sec.
(a) In which of the seven cases above could the velocity become instantaneously equal to zero
assuming the accelerations or decelerations remain as stated. (b) What happens to the values
of the cable tension at the instant when the velocity becomes zero? (c) What happens to the
values of the cable tension just after that instant of zero velocity when motion resumes?
(d) In case (2), is there an upper limit to the magnitude of the acceleration could achieve
given no limit to the power of the crane winch or strength of the cables? (e) What about case
(3)? (f) What can you say about the magnitude of the cable tensions as the accelerations in
cases (2) and (3) increase?
From these simple examples, you can easily see how closely static and dynamic conditions are
related. The importance of showing the directions of forces and accelerations or decelerationsin the FBD and KD and using these in the governing equations should also be evident.
Hopefully, the effects of the direction and magnitude of velocity vector and changes in the
velocity vector have also been noted.
1-4 Types of Motion: Pure Translation
We have already dealt with translation in the example above since it is the simplest type ofmotion. Motion in a straight line is the simplest type of translation. If the boat above is lifted or
lowered vertically with no swinging, it is undergoing straight line translation. For a moregeneral definition, we say the body is moving in pure translation when it moves such that all
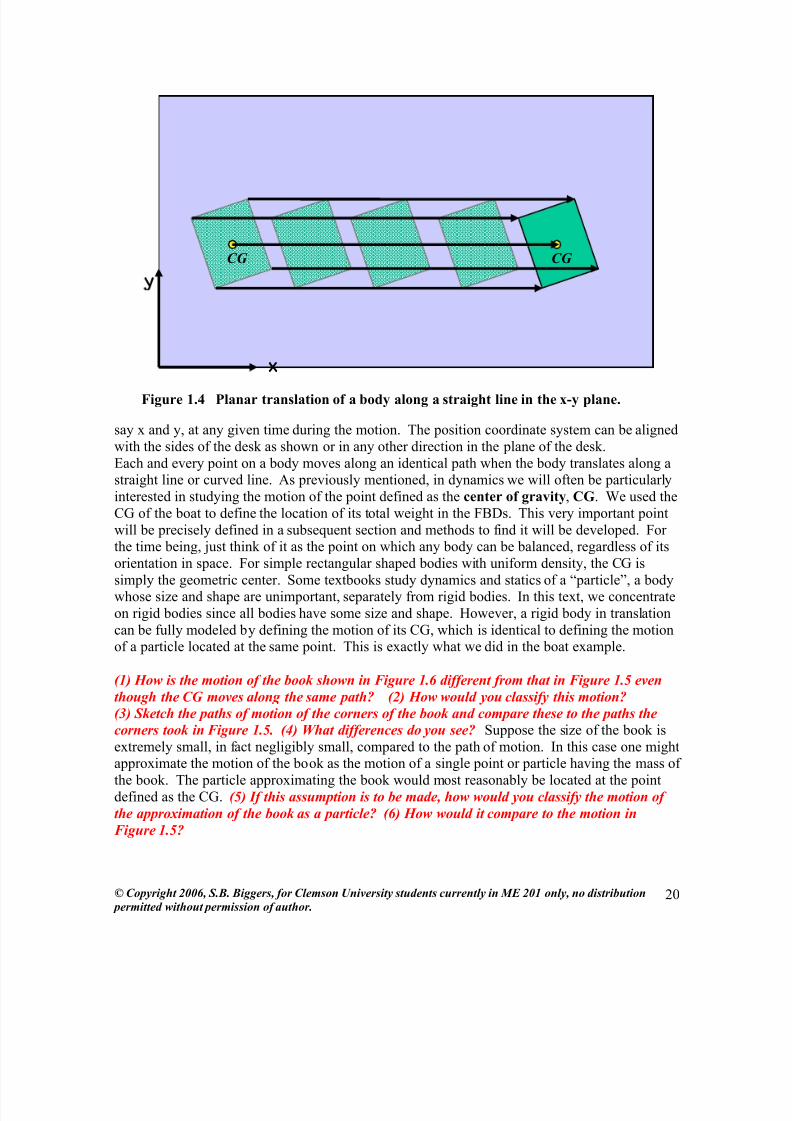
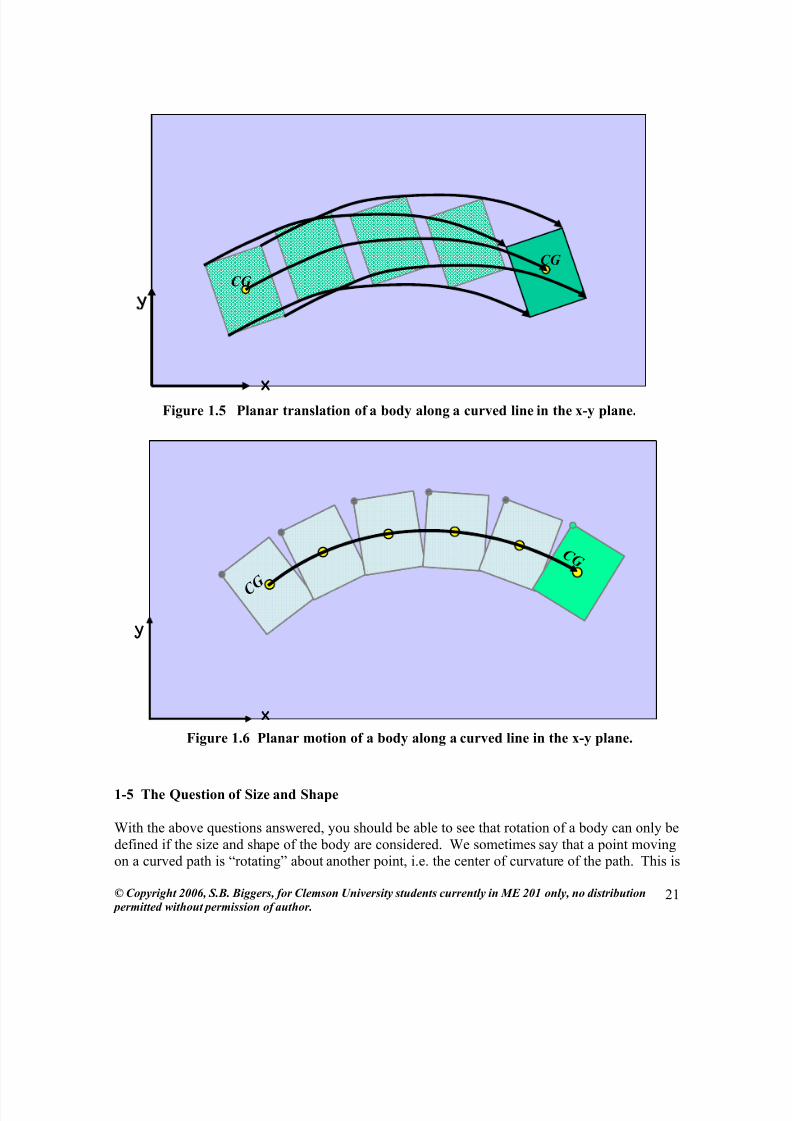
points on it travel along paths that have the same length and shape. Figures 1.4 and 1.5 below
illustrate such motion, first along a straight line and then along a curved line. Envision a book
lying flat on a horizontal desk and being moved as shown. Even though the book is a 3-D body,this motion is called planar translation since it can be fully defined by two position coordinates,
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 10/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.20
say x and y, at any given time during the motion. The position coordinate system can be aligned
with the sides of the desk as shown or in any other direction in the plane of the desk.
Each and every point on a body moves along an identical path when the body translates along astraight line or curved line. As previously mentioned, in dynamics we will often be particularly
interested in studying the motion of the point defined as the center of gravity, CG. We used the
CG of the boat to define the location of its total weight in the FBDs. This very important point
will be precisely defined in a subsequent section and methods to find it will be developed. For
the time being, just think of it as the point on which any body can be balanced, regardless of itsorientation in space. For simple rectangular shaped bodies with uniform density, the CG is
simply the geometric center. Some textbooks study dynamics and statics of a “particle”, a bodywhose size and shape are unimportant, separately from rigid bodies. In this text, we concentrate
on rigid bodies since all bodies have some size and shape. However, a rigid body in translation
can be fully modeled by defining the motion of its CG, which is identical to defining the motionof a particle located at the same point. This is exactly what we did in the boat example.
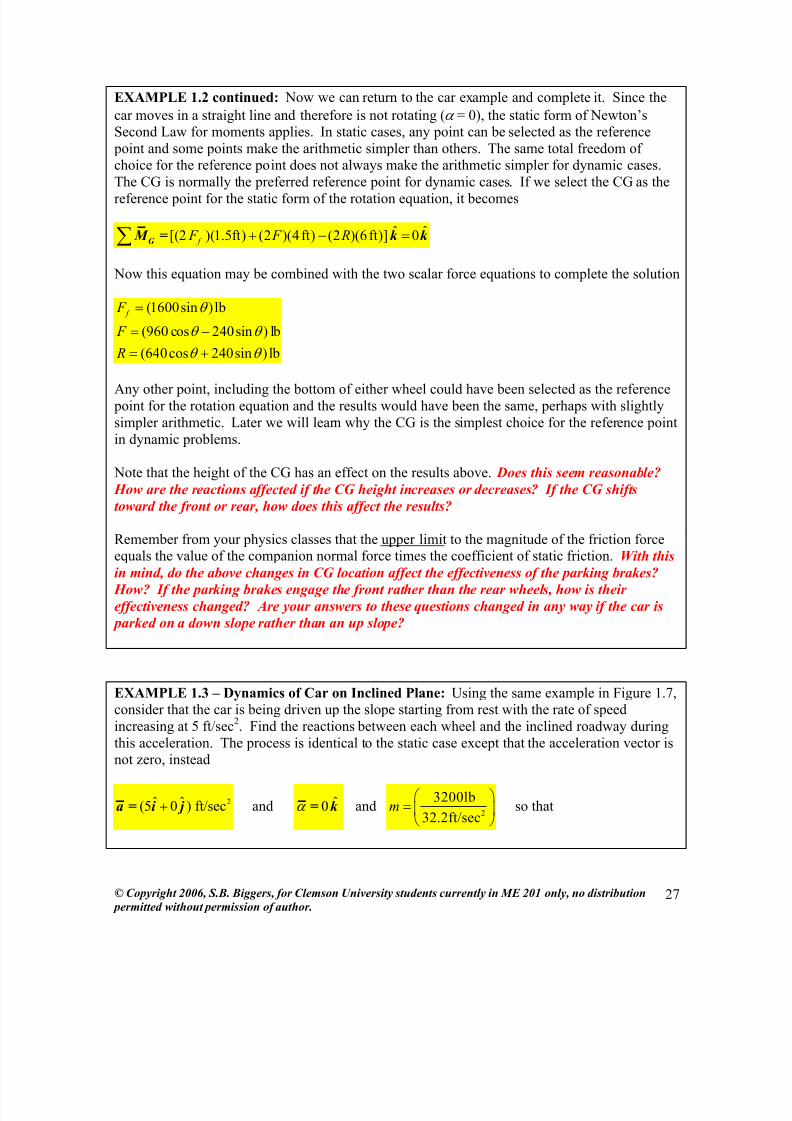
(1) How is the motion of the book shown in Figure 1.6 different from that in Figure 1.5 even
though the CG moves along the same path? (2) How would you classify this motion?
(3) Sketch the paths of motion of the corners of the book and compare these to the paths the
corners took in Figure 1.5. (4) What differences do you see? Suppose the size of the book is
extremely small, in fact negligibly small, compared to the path of motion. In this case one mightapproximate the motion of the book as the motion of a single point or particle having the mass of
the book. The particle approximating the book would most reasonably be located at the point
defined as the CG. (5) If this assumption is to be made, how would you classify the motion of
the approximation of the book as a particle? (6) How would it compare to the motion in
Figure 1.5?
x
Figure 1.4 Planar translation of a body along a straight line in the x-y plane.
CG CG
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 11/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.21
1-5 The Question of Size and Shape
With the above questions answered, you should be able to see that rotation of a body can only be
defined if the size and shape of the body are considered. We sometimes say that a point movingon a curved path is “rotating” about another point, i.e. the center of curvature of the path. This is
x
Figure 1.5 Planar translation of a body along a curved line in the x-y plane.
CG
CG
y
x
C G
C G
Figure 1.6 Planar motion of a body along a curved line in the x-y plane.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 12/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.22
technically true. However using the language of dynamics, this motion of a point or particle is
actually only translation along a curved path and equations (1.3) and (1.4) are of no use. Oncethe body has significant size and shape, then one of these two equations will be required to
model the motion of the body in addition to equation (1.1) or (1.2).
EXAMPLE 1.2 – Statics of Car on Inclined Plane: Questions of accelerations of a rigid bodyor a particle moving along a curved path require special attention and this will be addressed in
Chapter 2 and afterwards. But for the time being, let us examine this question of size on a
simpler, straight-line translational motion problem. Consider the motion of a car, along astraight inclined roadway as shown in Figure 1.7. The car weighs a total of 3200 lb, is
symmetric left to right, and has a CG located as shown. Due to symmetry, the wheel reactions
will be identical left to right. The car is rear wheel drive and the roadway provides sufficientfriction to prevent slipping of the tires. Effects of rotation of the wheels and axles as the car
translates are neglected for the present. First find the reactions between each wheel and the road
if the car is parked with the parking brakes engaged (lock rear wheels only). Anothersimplifying assumption made here is that the so called “rolling resistance”, associated with
rolling of flexible tires and imperfect wheel bearings, is negligible. This rolling resistance can beaccounted for rather easily and will be considered in later examples. But it should not be
confused with the contact friction between the tires and roadway that allows the car to remainstationary or to accelerate.
First, free the car from the roadway and draw the FBD. The KD is zero in this static case but is
shown here for consistency with examples to follow.
FBD of car KD of car
Right-Handed Coordinate System:
x- is lane of motion.
y
x
z
CG
2F
2R
W = 3200 lb
2F f
=
a x = 0
Photo courtesy of
http://forums.beyond.ca/showthread/t-50075.html
Figure 1.7 Static Equilibrium of a Car Parked on an Incline.
Car Geometry
6 ft 4 ft
1.5 ft
θ

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 13/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.23
The friction reaction prevents the car from sliding down the incline and acts parallel to the slope.
Friction preventing sliding or resulting from sliding will always be tangent to the surface of potential sliding. The factors of 2.0 are present on the unknown reactions due to the left-to-right
symmetry. Note that the coordinate system is oriented along the incline for simplicity in writing
the force vectors since the three unknown reactions are in these directions. Because such choices
are possible but not necessary, it is essential to show a sketch of the chosen coordinate systemalong with each FBD. A vertical and horizontal system could have been used if desired. Unit
vectors ˆ ˆ ˆi, j,k are defined in the given x,y,z directions, respectively. Using this coordinate
system, the weight must be resolved into components in the coordinate directions. Then the
static form of Newton’s Second Law for the forces is written as
ˆ ˆ ˆ ˆ[2 (3200lb)sin ] [2 2 (3200lb)cos ] 0 0θ θ − + + − = +∑ f F R F F = i j i j
Separating the scalar equations for the forces in the x- and y-directions, we get the sum of forces
in the x- and the y-directions shown below. In many simple problems, we will write these two
scalar equations direction without first writing the combined vector equation.
ˆ : 2 (3200lb)sin 0
ˆ : 2 2 (3200lb)cos 0
θ
θ
− =
+ − =
f F
R F
i
j
The first equation shows that the friction force at each rear wheel needed to keep the car static is
simply equal and opposite to half the x-component of the weight,
(1600sin )lbθ = f F
acting up the slope as assumed on the FBD. It should seem reasonable that as the angle θ goestoward zero, the required friction force also approaches zero. The opposite is true as the angle
increases. This is a rather obvious example of examining limiting cases to ensure your solution
is reasonable.
The scalar equation for the y-direction has two unknowns. Therefore, unless we make a
simplifying assumption, we cannot solve for the unknown normal reaction forces R and F . If thecar were to be treated as a particle and its size neglected, the front and rear wheel reactions
would become equal, would be located at the CG, and the simplified problem could be solved.
The normal wheel reactions would each be one fourth of the y-component of the car’s weight.The friction reaction is not affected by this simplification. However, it is hard to justify treating
such a sizable body as a particle and the simplified solution must be treated as a crudeapproximation.
If a more realistic solution is required, we are forced to find another governing equation.
Equation (1.4), the static form of Newton’s Second Law for rotation, is available. But first we
must define the concept of a moment. After this important development, the car example will be
revisited.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 14/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.24
1-6 Moment of a Force about a Point and Definition of a Couple
When Newton and his predecessors were trying to come to a firm understanding of what forces
are and how they affect static and dynamic bodies, they finally came to recognize that the
position of a force on a body was important, as well as its magnitude and direction of the force.Forces applied to an unrestrained body along a line in any direction but passing through the
balance point (CG) produced pure translation. Other forces along any line not passing throughthe CG produced translation AND ROTATION. One meaning of the word “moment” in the
dictionary is “importance” and we often speak of “momentous” occasions as those of special
importance. Therefore, Newton came to talk to his colleagues about the “moment” orimportance of a force, some having more moment or importance than others depending on how
the line along which they acted was located relative to the CG and how much the force tended to
rotate the body. The moment of a force about any given point was defined as the strength anddirection of that tendency to rotate the body about that point.
They also found that pairs of equal and opposite forces that are parallel but not collinear, produced only rotation and no translation of the CG since the sum of the force vectors is zero.This special set of forces obviously creates a moment since the pair produces rotation. Their
moment is given the special name of “couple.” They might have used the word “pair” and we
would still be using it in that way. Instead of pair, we use couple. Special properties of a couplewill be examined and used in later chapters.
In solid mechanics we have come to use the single word moment to represent “moment of aforce”. Whereas a force always tends to push or pull (i.e. translate) a body, a moment of a force
tends to rotate a body. The moment must be defined for a given force as being relative to agiven point since the tendency to rotate will change as the position of the force changes relative
to the point. When you use a wrench, you are applying a force to create rotation of a nut or bolt.
The force you apply is also pushing or pulling on the nut, but rotation is the objective. Thedistance of your hand’s force from the nut and the direction of the force are equally important.
In vector terms, a moment M of a force about a point is defined very precisely as the cross
product
× M = r F (1.6)
where r is the position vector from the reference point to any point on the line of action of the
force vector F . The given order of the terms in the cross-product is critical and the position
vector must originate at the reference point. Note that the moment is a vector that is
perpendicular to the plane formed by the vectors r and F . The line through the moment vectoris parallel to the axis about which the body tends to rotate. In plane motion in the x-y plane,moments will always be in the plus or minus z-direction and the axis of rotation or tendency to
rotate will always be perpendicular to the x-y plane of the body’s motion. In 3-D motion,
moments can have components in all three coordinate directions just as force and positionvectors can. The corresponding axis of rotation will be a line in 3-D space oriented according to
the components of the moment vector.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 15/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.25
Recall from your math courses that the magnitude of a cross product ( M in this case) of twovectors can be written in scalar for as
( ) ( ) sin M r F θ = (1.7)
where θ is the angle between the two vectors. The sign (direction) of the cross-product isdetermined by the right-hand-rule. In your math courses, you saw various geometric
interpretations of the cross product, especially when both vectors are position vectors havingunits of length. The moment is a physical interpretation of the cross product.
By regrouping the terms as shown in equation (1.8) and
recognizing that (r sinθ ) is the perpendicular distance
d p in the plane of the two vectors from the force vectorto the reference point, the magnitude of the moment can
be determined using a more physical scalar approach
( ) ( sin ) ( )( ) p F r F d θ = = (1.8)
The perpendicular distance is shown in the figure to the
right. When geometric information is two-dimensionaland given in a form so that d p is obvious, some prefer to
obtain the magnitude of the moment using equation
(1.8). The sign (direction) of the moment must then be determined by observation. Whengeometric information is 3-dimensional, it will almost always be preferable to use the more
formal vector approach to finding moments since the vector approach provides both the
magnitude and direction of the moment. Convince yourself that either of equations (1.6), (1.7),
or (1.8) yields the same magnitude of the moment and your observation gives the same direction
as the vector approach.
Figure 1.8 shows a wrench with several forces that are attempting to tighten the lug nut on thewheel. The wrench is horizontal. Think about how effective these forces are in doing this and
qualitatively rank them without computation. Then compute the moment of the force about
the nut. Do some by hand and some on your calculator, some with scalars and some with
cross-products, and a few with both methods for verification. Compare your computed values
to your qualitative ranking. Try to justify any differences from your qualitative rankings.
Recompute the moments about the center of the wheel, i.e. what tendency do the forces have to
rotate the wheel assuming the nut is tight. If the wheel is raised off the ground, with no
brakes applied and transmission out of gear, would the wheel rotate? If so, in which
direction?
You should have found the results for cases (a) and (i) are the same. Cases (b) and (d) should
also be the same. This illustrates a useful idea known as the “transmissibility of a force”. Put
this idea into words based on these examples?
If the wheel is in firm contact with the ground (center is 14 inches above ground) with the
transmission in neutral and no brakes applied and sufficient friction to keep the wheel from
F
r θ
pd
pd
reference
point

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 16/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.26
rotating, find the friction force for case (d). Draw the FBD of the wheel with wrench in place
to solve for the friction force. Then draw separate FBDs of the wrench and then the wheel so
that you get the same results.
The FBD of the wrench should show the applied force and the reaction the nut places on the left
end of the wrench. This illustrates that the wrench by itself is in static equilibrium and that thereactions from the nut on the wrench allow this equilibrium.
The FBD of the wheel alone illustrates another useful idea known as equivalent force-couple
system. The wheel with the “equivalent force and couple moment from the wrench, applied on
the nut, is still in static equilibrium. Observe the relationship between the reactions of the nut
on the wrench and the wrench on the nut. Observe how these relate to the equivalent force-
couple system. Also, remember Newton’s Third Law about bodies in contact with each other.
Right-Handed System:
x-y is plane of motion.
y
x
z
a
g
fed
cb
h
Fi ure 1.8 Effect of force location and direction on Moment about a oint.
2 2 4
0.8
(lengths in inches)
55o
F = 20 lb
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 17/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.27
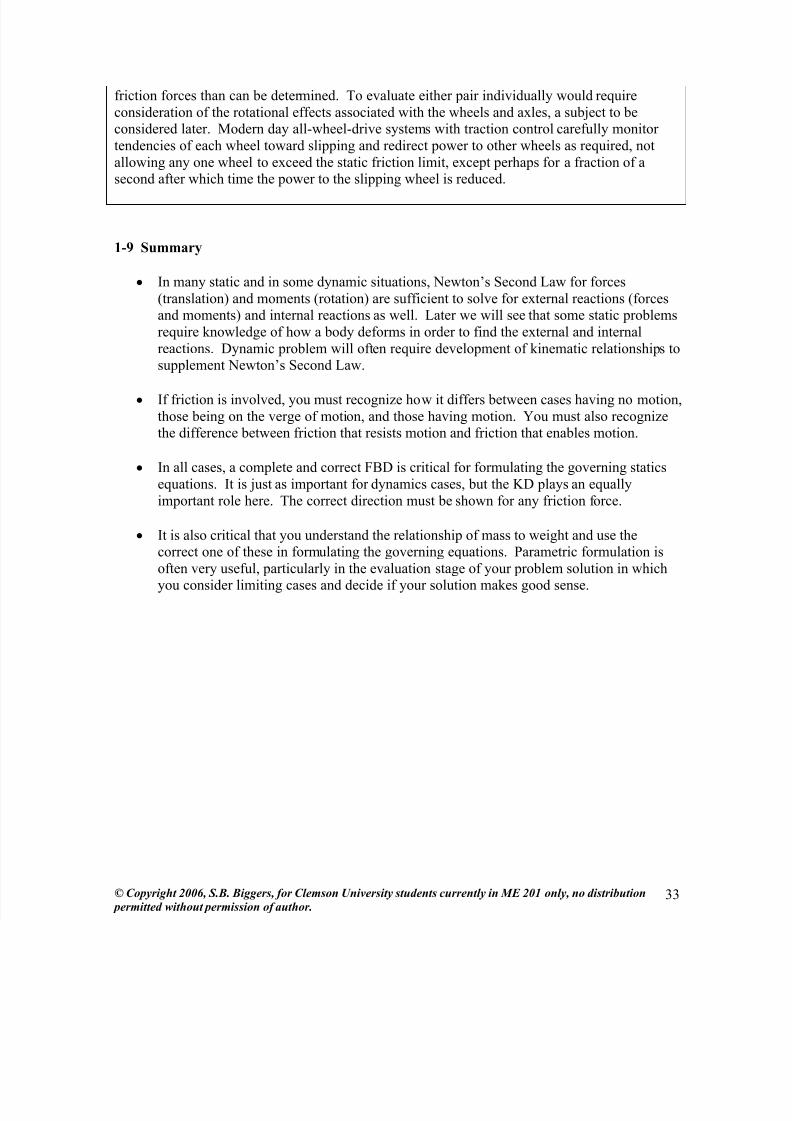
EXAMPLE 1.2 continued: Now we can return to the car example and complete it. Since the
car moves in a straight line and therefore is not rotating (α = 0), the static form of Newton’sSecond Law for moments applies. In static cases, any point can be selected as the reference
point and some points make the arithmetic simpler than others. The same total freedom ofchoice for the reference point does not always make the arithmetic simpler for dynamic cases.
The CG is normally the preferred reference point for dynamic cases. If we select the CG as thereference point for the static form of the rotation equation, it becomes
ˆ ˆ[(2 )(1.5ft) (2 )(4ft) (2 )(6ft)] 0 f F F R+ − =∑ G M = k k
Now this equation may be combined with the two scalar force equations to complete the solution
(1600sin )lb
(960 cos 240sin ) lb
(640cos 240sin ) lb
f F
F
R
θ
θ θ
θ θ
=
= −
= +
Any other point, including the bottom of either wheel could have been selected as the reference
point for the rotation equation and the results would have been the same, perhaps with slightly
simpler arithmetic. Later we will learn why the CG is the simplest choice for the reference point
in dynamic problems.
Note that the height of the CG has an effect on the results above. Does this seem reasonable?
How are the reactions affected if the CG height increases or decreases? If the CG shifts
toward the front or rear, how does this affect the results?
Remember from your physics classes that the upper limit to the magnitude of the friction force
equals the value of the companion normal force times the coefficient of static friction. With thisin mind, do the above changes in CG location affect the effectiveness of the parking brakes?
How? If the parking brakes engage the front rather than the rear wheels, how is their
effectiveness changed? Are your answers to these questions changed in any way if the car is
parked on a down slope rather than an up slope?
EXAMPLE 1.3 – Dynamics of Car on Inclined Plane: Using the same example in Figure 1.7,consider that the car is being driven up the slope starting from rest with the rate of speed
increasing at 5 ft/sec2. Find the reactions between each wheel and the inclined roadway during
this acceleration. The process is identical to the static case except that the acceleration vector isnot zero, instead
2ˆ ˆ(5 0 ) ft/sec+a = i j and ˆ0α = k and2
3200lb
32.2ft/sec
=
m so that

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 18/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.28
2
2
3200 lbˆ ˆ ˆ ˆ[2 (3200 lb)sin ] [2 2 (3200 lb) cos ] (5 0 ) ft/sec32.2 ft/sec
θ θ
− + + − = +
∑ f F R F F = i j i j
ˆ ˆ[(2 )(1.5 ft) (2 )(4 ft) (2 )(6 ft)] 0 f F F R+ − =∑ G M = k k
Again, separating the scalar equations as follows:
2
2
3200 lbˆ : 2 (3200lb)sin (5 ft/sec )32.2 ft/sec
ˆ : 2 2 (3200lb)cos 0
ˆ : (2 )(1.5 ft) (2 )(4 ft) (2 )(6 ft) 0
f
f
F
R F
F F R
θ
θ
− =
+ − =
+ − =
i
j
k
the reactions are found to be
(1600sin 248.4) lb
(960 cos 240sin 37.27) lb
(640cos 240sin 37.27) lb
f F
F
R
θ
θ θ
θ θ
= +
= − −
= + +
As expected, the friction force required to accelerate the car is greater than that required to hold
it static. The y-direction and z-direction equations are unchanged from the static case, but thefront normal reaction is decreased and rear normal reaction is increased compared to the static
case. Intuition might or might not lead you to think the normal reactions should change from the
static case since the normal direction equation is unchanged.
Is it reasonable for the front reaction to get smaller as the acceleration increases, the
inclination angle increases, the CG moves toward the rear, and/or height of the CG increases?
Do the results confirm these expectations based on common sense? Can you think of a
similar case you have seen where the front reaction goes to zero? What conclusions could you
make if any of the above parameters changed sufficiently to yield a negative value of the front
reaction?
Can you modify the above three equations for the dynamic case to create the governing
equations for the static case? Can you use these equations to produce static and dynamic
solutions for the case where the car is facing down the incline? Using a slope of 20 degrees,
compare the static and dynamic solutions for an upward slope to those for a downward slope.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 19/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.29
1-7 Friction and the Limits on Friction
Friction plays an important part in most dynamics and many statics problems. Sometimes
friction prevents, limits, or resists motion; but sometimes it enables motion. The latter is the case
in the accelerating car example or when you start walking across the floor. The former is the
case in the parked car example or while you are bring your walking to a halt. In both carexamples, it was assumed that there was sufficient friction to prevent the wheels from slipping or
spinning regardless of the other parameters in the problem. If the roadway or tires are slick, thismay not be true. As you were reminded in the above example, friction forces that resist sliding
between two dry, unlubricated surfaces have upper limits. Before sliding starts, the friction force
can take any value between zero, when there is no tendency to slide, up to the static limit atwhich point sliding starts. That upper limit on the friction force for static behavior is
( ) µ f s nmax staticF = ( ) (F ) (1.9)
where µ s is the coefficient of static friction and
nF is the force normal to the sliding surfaces. It
is very important not to simply use this limiting value for every static friction force and to
recognize that it gives only the largest value possible before sliding starts. If this limit is
eventually reached and sliding begins, the friction force can be approximated as a constant valueuntil such time as sliding stops. The dynamic friction force is
( ) µ f k ndynamic
F = ( ) (F ) (1.10)
where µ k is the coefficient of kinetic friction. Both coefficients of friction are physical
properties that must be determined experimentally. They are functions of both surfaces in
contact. Some typical ranges for values of static and kinetic coefficients of friction are given inTable 1.1 below. The condition of the surfaces can make a big difference in the exact value.
To ensure you understand the above discussion, consider the simple case shown in Figure 1.9.
A horizontal force F x is applied to a 100 lb box with negligible size in an attempt to slide it
across the horizontal surface. The static and kinetic coefficients are shown. If F x is applied
starting from zero and increases gradually up to 100 lb, graph the friction force versus the
applied force F x in the space to the right of the figure.

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 20/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.30
Table 1.1 Typical Ranges of Coefficients of Dry Friction
Contact Surfaces Static Kinetic
Metal on Metal 0.15 – 0.60 0.12 - .0.50Metal on Wood 0.20 – 0.60 0.15 – 0.45
Metal on Stone 0.30 – 0.70 0.25 – 0.60
Wood on Wood 0.25 – 0.50 0.20 – 0.45
Stone on Stone 0.40 – 0.70 0.35 – 0.60
Rubber on Concrete 0.60 – 0.90 0.50 – 0.75
EXAMPLE 1.3 continued: Now that friction forces are understood to be limited by the
coefficients of static and kinetic friction and the associated normal forces, other questions can be
examined for the car on the inclined roadway. For example, the maximum acceleration that carcan achieve can now be found. (a) Decide whether this would occur with the rear driving
wheels spinning or not spinning. (b) Then find the maximum possible acceleration if s = 0.30
and k = 0.20 and with a 20 degree inclination angle. (c) If the car were all wheel drive, how
fast could it accelerate?
Another question might be to ask whether, for the above values of the parameters, the parked car
can remain static or will it slide down the incline. (d) If you decide it is in static equilibrium,
find the angle at which the parked car would start sliding backward if the slope of the incline
were increased. (e) Find the acceleration the car would experience at an angle just greater
than that limiting value as it slides backward down the increased slope.
1-8 Parametric Formulation
Fx
Ff
0 1000
Figure 1.9 Variation of Friction Force
during Static and Dynamic Response.
Fx
100 lb
= 0.30 and k = 0.20

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 21/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.31
In Examples 1.2 and 1.3, many questions were asked as a way of examining the governingequations and their solution. Some of these questions were “what-if” questions similar to those
that might be asked in a design situation. The governing equations were formulated with only
one variable parameter, i.e. the inclination angle θ . This allowed some of the questions to beanswered easier than others. Often in real-world engineering work, it is preferable to formulate
the governing equations in terms of many parameters that could take on ranges of values. This isa particularly important approach when a system is being designed rather than simply analyzedIt also allows critical examination of the equations and the solution to be obtained and used with
relative ease.
EXAMPLES 1.2 and 1.3 reformulated: Let us reformulate the car on incline problem using
the parametric approach. The only numbers that will appear are due to the restriction that the car
has four wheels and is symmetric left to right. The wheels are assumed to remain in contact withthe roadway and rotational effects of the wheels and axles are neglected as before. The system
parameters are defined in Figure 1.10.
The FBD shows that the possibility of 4-wheel drive, rear-wheel drive, or front-wheel drive is
allowed due to the presence of friction forces on the front and/or rear wheels. Either friction
forces may be set to zero, or to limiting values to investigate different scenarios. In addition, theKD shows a positive x-direction acceleration. This is a good practice in complex problems if the
direction cannot be observed but must be determined. The acceleration can be set to zero for the
parked car problem. Negative computed values of acceleration will indicate the car is sliding backward down the slope. While the algebra associated with solving the parametric equations is
y
x
z Fi ure 1.10 Parametric Formulation for a Car on an Incline.
Variable Parameters: b, c, h, W, F, R, F f , θ, a x
FBD of carKD of car
b c
h
θ
CG
2F
2R
W
2F f
=
Car Geometry
a x
m=W/g
Photo courtesy ofhttp://forums.beyond.ca/showthread/t-50075.html

8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 22/23
© Copyright 2006, S.B. Biggers, for Clemson University students currently in ME 201 only, no distribution
permitted without permission of author.32
not too complex in this case, symbolic math programs such as Maple or MathCad are quiteuseful in finding a parametric solution. MATLAB can also be used with the symbolic toolbox.
Units will not be shown in the equations because units are associated with each parameter. The
combinations of parameters in each term must produce units consistent with the other terms. The
FBD is drawn as before showing known and unknown parameters. Observations of zero andnonzero accelerations are made and shown on the KD, i.e.
ˆ ˆ0 xa +a = i j and ˆ0α = k along with ( )/m W g =
Then using the FBD and KD along with Newton’s Second Law as before, the governing
equations are
( )ˆ ˆ ˆ ˆ[2( ) sin ] [2 2 cos ] / ( 0 ) fR fF x F F W R F W W g aθ θ + − + + − = +∑F = i j i j
ˆ ˆ[2( + ) (2 ) (2 ) ] 0 fR fF
F F h F c R b+ − =∑ G M = k k
Separating the scalar equations yields
( )ˆ : 2( ) sin /
ˆ : 2 2 cos 0
ˆ : 2( ) (2 ) (2 ) 0
fR fF x
fR fF
F F W W g a
R F W
F F h F c R b
θ
θ
+ − =
+ − =
+ + − =
i
j
k
After some algebra, or using a symbolic math program, the reactions are found to be
( )( )
( )
( ) 0.5 / sin
cos sin /0.5
cos sin /0.5
fR fF x
x
x
F F W a g
b h a g F W
b c
c h a g R W
b c
θ
θ θ
θ θ
+ = +− +
= +
+ + =
+
You may want to practice with your chosen math program to see if you can duplicate these
results. You can see that all terms added together in any part of any equation have like units.
Units are consistent on the left and right hand sides of the equations. The parametric solution
can be specialized to produce the solutions to both the parked car and accelerating car examples.Furthermore, all of the questions you were asked to answer concerning effects of changes in
values such as location of the CG, angle of inclination, which wheels drive the car, etc. can be
easily answered by simply observing where the quantities are in the solution, what signs theyhave or by assigning numerical over a range of values. Math programs are also good ways to
numerically evaluate at range of parameter values or even to plot results as a function of the
parameters. If a 4-wheel drive arrangement is selected, and if neither front nor rear wheelfriction forces are at their static limit or either pair of wheels is spinning, it is the sum of the 4
8/12/2019 Statics and Dynamics Ch 1
http://slidepdf.com/reader/full/statics-and-dynamics-ch-1 23/23
© Copyright 2006 S B Biggers for Clemson University students currently in ME 201 only no distribution 33
friction forces than can be determined. To evaluate either pair individually would require
consideration of the rotational effects associated with the wheels and axles, a subject to beconsidered later. Modern day all-wheel-drive systems with traction control carefully monitor
tendencies of each wheel toward slipping and redirect power to other wheels as required, not
allowing any one wheel to exceed the static friction limit, except perhaps for a fraction of a
second after which time the power to the slipping wheel is reduced.
1-9 Summary
• In many static and in some dynamic situations, Newton’s Second Law for forces
(translation) and moments (rotation) are sufficient to solve for external reactions (forcesand moments) and internal reactions as well. Later we will see that some static problems
require knowledge of how a body deforms in order to find the external and internal
reactions. Dynamic problem will often require development of kinematic relationships to
supplement Newton’s Second Law.
• If friction is involved, you must recognize how it differs between cases having no motion,
those being on the verge of motion, and those having motion. You must also recognizethe difference between friction that resists motion and friction that enables motion.
• In all cases, a complete and correct FBD is critical for formulating the governing statics
equations. It is just as important for dynamics cases, but the KD plays an equally
important role here. The correct direction must be shown for any friction force.
• It is also critical that you understand the relationship of mass to weight and use the
correct one of these in formulating the governing equations. Parametric formulation isoften very useful, particularly in the evaluation stage of your problem solution in whichyou consider limiting cases and decide if your solution makes good sense.