steady-state analysis of a multi-class map/ph/c queue … outline background ... we consider a...
TRANSCRIPT

Steady-state Analysis of a Multi-class
MAP/PH/c Queue with Acyclic PH Retrials
Tugrul DayarDepartment of Computer Engineering
Bilkent [email protected]
(Joint Work with M. Can Orhan)To appear in Applied Probability Trust journal, 2016
14 January 2016

Outline
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 2 / 31
■ Background
▲ An Example
■ Mathematical Model
▲ An Example (cont’d)
■ Ergodicity Condition
▲ Necessary Part▲ Sufficient Part
■ Kronecker Representation
▲ An Example (cont’d)
■ Numerical Results■ Conclusion

Background
Outline
Background
An Example
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 3 / 31
We consider a multi-class MAP/PH/c queueing system with
■ K customer classes■ class-dependent MAP (Markovian Arrival Process) arrivals■ class-dependent PH (phase-type) services in c servers■ class-dependent acyclic PH retrials of customers
who find the servers busy upon arrival
Model has infinite state space due to infinite retrial queue (orbit)

Background (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 4 / 31
Earlier Work on the Subject
■ Kulkarni: 2-class BM/G/1 with EXP retrial (JAP ’86)
■ Falin: Multi-class BM/G/1 with EXP retrial (AAP ’88)
■ Neuts, Rao: M/M/c with EXP retrial (QS ’90)
■ Falin, Templeton: Retrial Queues (Chapman and Hall, ’97)
■ Diamond, Alfa: MAP/PH/1 with EXP retrial (SM ’98)
■ Diamond, Alfa: M/PH/1 with PH retrial (EJOR ’99)
■ Choi, Chang: MAP1,2/M/c/∞,K with EXP retrial (MCM ’99)
■ Choi, Chang, Kim: MAP1,2/M/c/c+K,∞ with EXP retrial (TOP ’99)
■ He, Li, Zhao: BMAP/PH/c/c+K with PH retrial, impatience (QS ’00)
■ Dudin, Klimenok: BMAP/SM/1 with EXP retrial (QS ’00)
■ Breuer, Dudin, Klimenok: BMAP/PH/c with EXP retrial (QS ’02)
■ Artalejo, Gomez-Corral: MAP/PH/c with PH retrial, finite source (IEEE CL ’07)

Background (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 5 / 31
Earlier Work on the Subject
■ Artalejo, Gomez-Corral: Retrial Queueing Systems (Springer ’08)
■ Shin: M/M/c with PH2 retrial (JAMI ’11)
■ Shin, Moon: M/M/c with PH retrial (EJOR ’11)
■ Phung-Duc, Kawanishi: M/M/c/c+K with EXP retrial, after-call work (NACO ’11)
■ Kim, Mushko, Dudin: BMAP/PH/c with EXP retrial, impatience (AOR ’12)
■ Artalejo, Phung-Duc: M/M/c with EXP retrial, two-way communication (JIMO ’12)
■ Kumar, Sohraby, Kim: M/M/c with PH retrial, impatience (IEEE CL ’13)
■ Chakravarty: MAP/PH/c with PH retrial (Ed. book, Springer ’13)
■ Shin, Moon: Multiclass M/M/c with EXP retrial (MCAP ’14)
■ Phung-Duc, Kawanishi: M/M/c/c+K with EXP retrial, after-call work, impatience(PE ’14)
■ Sakurai, Phung-Duc: M/M/c with EXP retrial, two-way communication,class-dependent service (TOP ’15)

Background (cont’d)
Outline
Background
An Example
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 6 / 31
Customers of class k ∈ {1, . . . ,K} arrive according to MAP
(Ck,Dk) of order mAk
which is an irreducible MC with state space {1, . . . ,mAk } and
generator matrix (Ck +Dk), whereCk: nonsingular with negative diagonal,
nonnegative off-diagonal elements, andcharacterizing transitions without an arrival
Dk: nonnegative and characterizing transitions with one arrival
There exists a nonnegative row vector θk ∈ R1×mA
k
≥0 s.t.
θk(Ck +Dk) = 0 and θke = 1
Average arrival rate of class k: λk = θkDke

Background (cont’d)
Outline
Background
An Example
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 7 / 31
Customers of class k ∈ {1, . . . ,K} receive service according toPH distribution
(βk,T k) of order mSk and T 0
k = −T ke
which is distribution of time until absorption in a finite MC with
■ state space {1, . . . ,mSk + 1}
■ generator matrix Tk =
[
T k T 0k
0 0
]
(mSk+1)×(mS
k+1)
■ initial probability vector (βk, 1− βke) ∈ R1×(m+1)≥0
whereT k: nonsingular with negative diagonal and
nonnegative off-diagonal elements
Average service rate of class k: µk = [−βk(T k)−1e]−1

Background (cont’d)
Outline
Background
An Example
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 8 / 31
If all servers are busy upon arrival, an arriving customer of class kjoins orbit k and retries to capture a server according to acyclic
PH distribution
(ξk,Uk) of order mRk and U0
k = −Uke
where Uk is upper-triangular
Average retrial rate of class k: δk = [−ξk(Uk)−1e]−1

An Example
Outline
Background
An Example
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 9 / 31
Let K = 2, c = 2, and
C1 =
[
−0.8 0.8
0 −0.8
]
2×2
, D1 =
[
0 0
0.8 0
]
2×2
, C2 =[
−0.3]
1×1, D2 =
[
0.3]
1×1
ξ1=
[
1 0]
1×2, U1 =
[
−1 1
0 −1
]
2×2
, ξ2=
[
1]
1×1, U2 =
[
−0.5]
1×1
β1=
[
0.75 0.25]
1×2, T 1 =
[
−1 0.25
0 −0.25
]
2×2
, β2=
[
1]
1×1, T 2 =
[
−0.5]
1×1
Hence,
U0
1 =
[
0
1
]
2×1
, U0
2 =[
0.5]
1×1, T
0
1 =
[
0.75
0.25
]
2×1
, T0
2 =[
0.5]
1×1
and
λ1 = 0.4, λ2 = 0.3, δ1 = δ2 = 0.5, µ1 = 0.4, µ2 = 0.5
mA1 = 2, m
A2 = 1, m
R1 = 2, m
R2 = 1, m
S1 = 2, m
S2 = 1

Mathematical Model
Outline
Background
Mathematical Model
An Example (cont’d)
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 10 / 31
Let
■ Xk(t): phase of arrival process of class k customers■ XbR
k+iR
k(t): # of class k retrial customers in phase iRk
■ XbSk+iS
k(t): # of servers serving class k customers in phase iSk
for iRk = 1, . . . ,mRk and iSk = 1, . . . ,mS
k , where
mR =
K∑
k=1
mRk , mS =
K∑
k=1
mSk
bRk = K +k−1∑
k′=1
mRk′ , bSk = K +mR +
k−1∑
k′=1
mSk′
Then we have multi-dimensional MC
X(t) = {X1(t), . . . , XK+mR+mS (t) : t ≥ 0}

Mathematical Model (cont’d)
Outline
Background
Mathematical Model
An Example (cont’d)
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 11 / 31
with state space S = SA × SR × SS where
SA = ×Kk=1
{
1, . . . ,mAk
}
SR = ZmR
≥0
SS = {y = (y1, . . . , ymS ) ∈ ZmS
≥0 | ye ≤ c}
and a possible state representation of the model is
x = (x1, . . . , xK+mR+mS ) ∈ S
# of busy servers in state x: n(x) =∑K
k=1
∑mSk
i=1 xbSk+i
SS is defined so that n(x) ≤ c
|SS | =c
∑
i=0
(i+mS − 1)!
i! (mS − 1)!

An Example (cont’d)
Outline
Background
Mathematical Model
An Example (cont’d)
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 12 / 31
The model has 8 dimensionssince K = 2, mR = 3, mS = 3
Moreover, bR1 = 2, bR2 = 4, bS1 = 5, bS2 = 7, n(x) = x6 + x7 + x8
Therefore, the state space of the MC is given by
S = SA × SR × SS ,
whereSA = {1, 2} × {1} , SR = Z
3≥0
SS = {(0, 0, 0), (0, 0, 1), (0, 0, 2), (0, 1, 0), (0, 1, 1),
(0, 2, 0), (1, 0, 0), (1, 0, 1), (1, 1, 0), (2, 0, 0)}
for c = 2

Mathematical Model (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 13 / 31
Matrix QAk is associated with arrival of class k customers:
QAk (x,y) =
Ck(xk, i) if i 6= xk and y = x+ (i− xk)eTk
Dk(xk, i)ξk(j) if n(x) = c and y = x+ (i− xk)eTk + eT
bRk+j
Dk(xk, i)βk(j′) if n(x) < c and y = x+ (i− xk)e
Tk + eT
bSk+j′
0 otherwise
for i = 1, . . . ,mAk , j = 1, . . . ,mR
k , j′ = 1, . . . ,mS
k , and x,y ∈ S
Matrix QRk is associated with retrial of class k customers:
QRk (x,y) =
xbRk+iUk(i, j) if i 6= j and y = x− eT
bRk+i
+ eTbRk+j
xbRk+iU
0k(i)βk(j
′) if n(x) < c and y = x− eTbRk+i
+ eTbSk+j′
0 otherwise
for i, j = 1, . . . ,mRk , j
′ = 1, . . . ,mSk , and x,y ∈ S

Mathematical Model (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 14 / 31
Matrix QSk is associated with service of class k customers:
QSk (x,y) =
xbSk+iT k(i, j) if i 6= j and y = x− eT
bSk+i
+ eTbSk+j
xbSk+iT
0k(i) if y = x− eT
bSk+i
0 otherwise
for i, j = 1, . . . ,mSk and x,y ∈ S
Therefore, generator matrix underlying X(t) can be written as
Q = Qoff + diag(−Qoffe) with Qoff =∑K
k=1
(
QAk +QR
k +QSk
)

Ergodicity Condition
Outline
Background
Mathematical Model
Ergodicity Condition
Necessary Part
Sufficient Part
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 15 / 31
With the help of Lyapunov functions, we show that
∑Kk=1
λk
µk< c
is a necessary and sufficient ergodicity condition
Lyapunov function used to show sufficiency aids intruncating S with a given steady-state probability mass
We start with Lyapunov functions that work for simple models,and add terms for additional complexities of model
Two vectors, uk and vk, used in additional terms are introduced

Ergodicity Condition (cont’d)
Outline
Background
Mathematical Model
Ergodicity Condition
Necessary Part
Sufficient Part
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 16 / 31
There exists a unique vector uk ∈ RmA
k×1 for MAP (Ck,Dk)
and λk = θkDke s.t.
(Ck +Dk)uk = λke−Dke and uke = 1
Since transition rates describing MAP arrivals depend on phase,elements of uk are used in additional terms to obtain a conditionbased on λk instead of phase-dependent arrival rates in Dk
There exists a unique vector vk ∈ RmS
k×1
≥0 for PH service
distribution (βk,T k) and µk = [−βk(T k)−1e]−1 s.t.
vk = −µk(T k)−1e and βkvk = 1
Since transition rates describing PH service depend on phase,elements of vk are used in additional terms to obtain a conditionbased on µk instead of phase-dependent service rates in T 0
k
Necessary Part
Outline
Background
Mathematical Model
Ergodicity Condition
Necessary Part
Sufficient Part
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 17 / 31
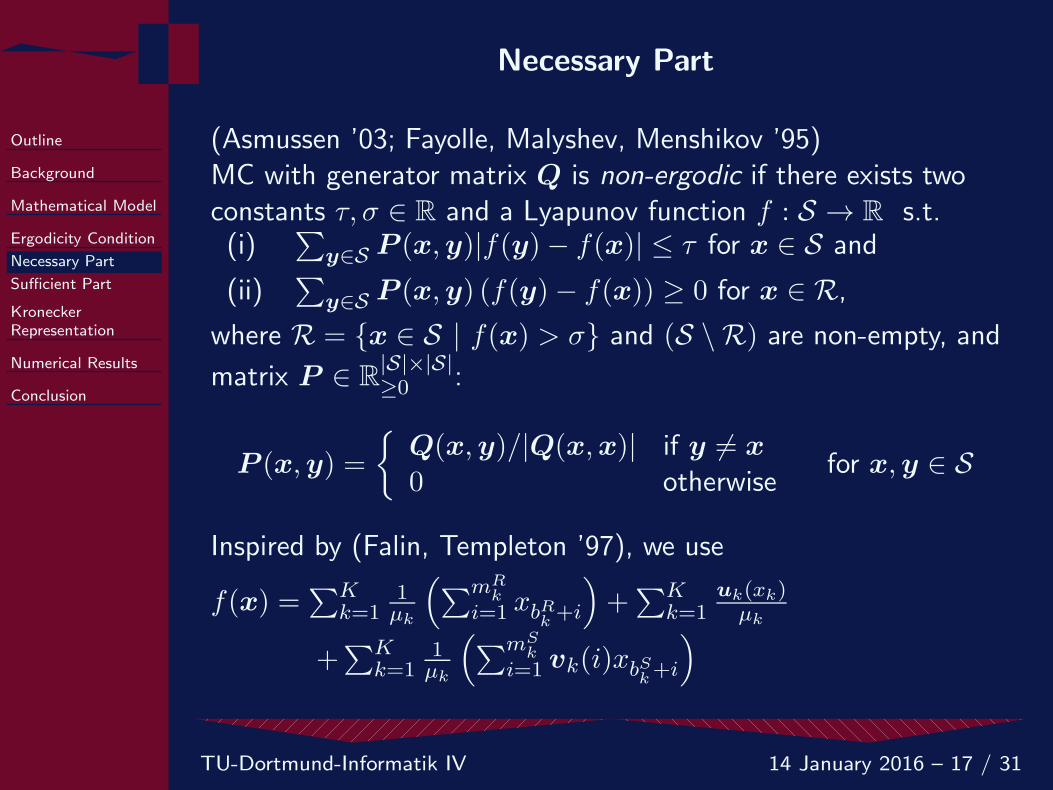
(Asmussen ’03; Fayolle, Malyshev, Menshikov ’95)MC with generator matrix Q is non-ergodic if there exists twoconstants τ, σ ∈ R and a Lyapunov function f : S → R s.t.(i)
∑
y∈S P (x,y)|f(y)− f(x)| ≤ τ for x ∈ S and
(ii)∑
y∈S P (x,y) (f(y)− f(x)) ≥ 0 for x ∈ R,
where R = {x ∈ S | f(x) > σ} and (S \ R) are non-empty, and
matrix P ∈ R|S|×|S|≥0 :
P (x,y) =
{
Q(x,y)/|Q(x,x)| if y 6= x
0 otherwisefor x,y ∈ S
Inspired by (Falin, Templeton ’97), we use
f(x) =∑K
k=11µk
(
∑mRk
i=1 xbRk +i
)
+∑K
k=1uk(xk)
µk
+∑K
k=11µk
(
∑mSk
i=1 vk(i)xbSk+i
)

Sufficient Part
Outline
Background
Mathematical Model
Ergodicity Condition
Necessary Part
Sufficient Part
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 18 / 31
(Tweedie ’75) MC is ergodic if and only if there exists aLyapunov function g : S → R and a finite set C ⊂ S s.t.(i) {x ∈ S | g(x) ≤ τ} is finite for all τ < ∞,(ii) d(x) ≤ −γ for all x ∈ S \ C and some γ > 0, and(iii) d(x) < ∞ for all x ∈ S,
where d(x) =∑
y∈S Q(x,y) (g(y)− g(x)) is called the drift instate x ∈ S
For acyclic PH retrial distribution (ξk,Uk),
let Uk = Uk + diag(U0k) and ηk ∈ R
mRk×1 be given as
ηk(i) =
{
−c/µk if i ∈ Ik0 otherwise
for i = 1, . . . ,mRk ,
where Ik = {i ∈ {1, . . . ,mRk } | U0
k(i) = 0}
Then there exists wk ∈ RmR
k×1 s.t. Ukwk = ηk
Sufficient Part (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 19 / 31
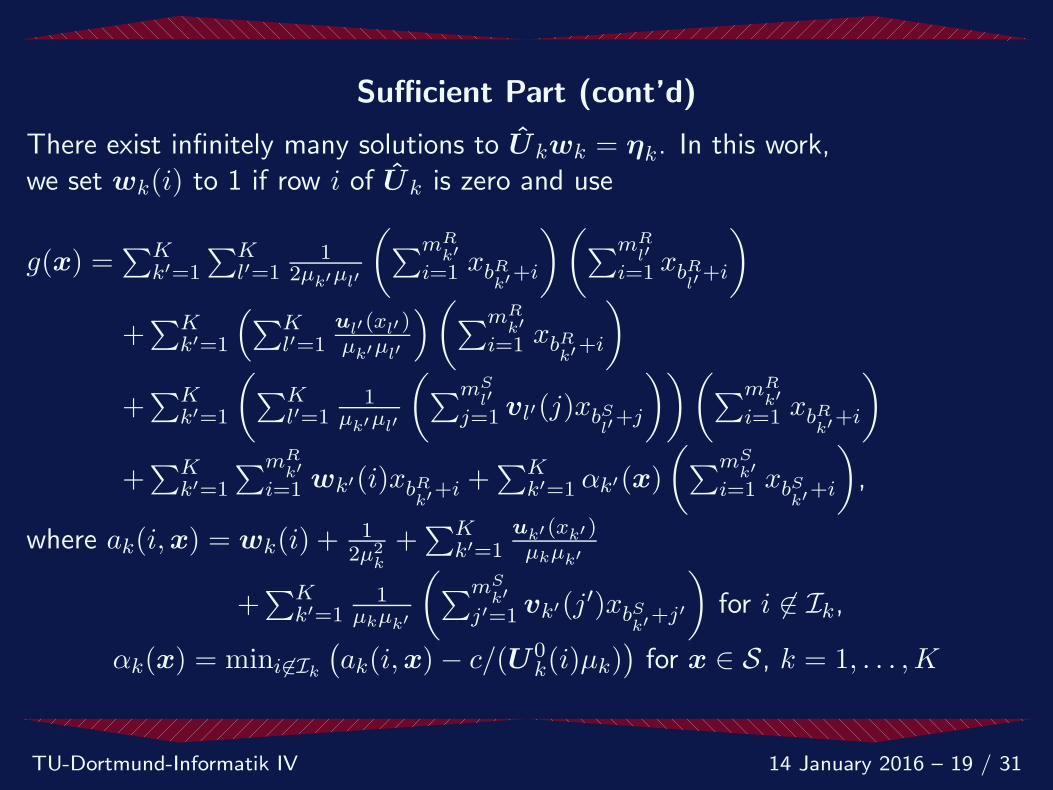
There exist infinitely many solutions to Ukwk = ηk. In this work,we set wk(i) to 1 if row i of Uk is zero and use
g(x) =∑K
k′=1
∑Kl′=1
12µk′µl′
(
∑mRk′
i=1 xbRk′+i
)(
∑mRl′
i=1 xbRl′+i
)
+∑K
k′=1
(
∑Kl′=1
ul′ (xl′ )µk′µl′
)
(
∑mRk′
i=1 xbRk′+i
)
+∑K
k′=1
(
∑Kl′=1
1µk′µl′
(
∑mSl′
j=1 vl′(j)xbSl′+j
))(
∑mRk′
i=1 xbRk′+i
)
+∑K
k′=1
∑mRk′
i=1 wk′(i)xbRk′+i +
∑Kk′=1 αk′(x)
(
∑mSk′
i=1 xbSk′+i
)
,
where ak(i,x) = wk(i) +1
2µ2
k
+∑K
k′=1uk′ (xk′ )µkµk′
+∑K
k′=11
µkµk′
(
∑mSk′
j′=1 vk′(j′)xbS
k′+j′
)
for i 6∈ Ik,
αk(x) = mini 6∈Ik(
ak(i,x)− c/(U0k(i)µk)
)
for x ∈ S, k = 1, . . . ,K
Kronecker Representation
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
An Example (cont’d)
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 20 / 31
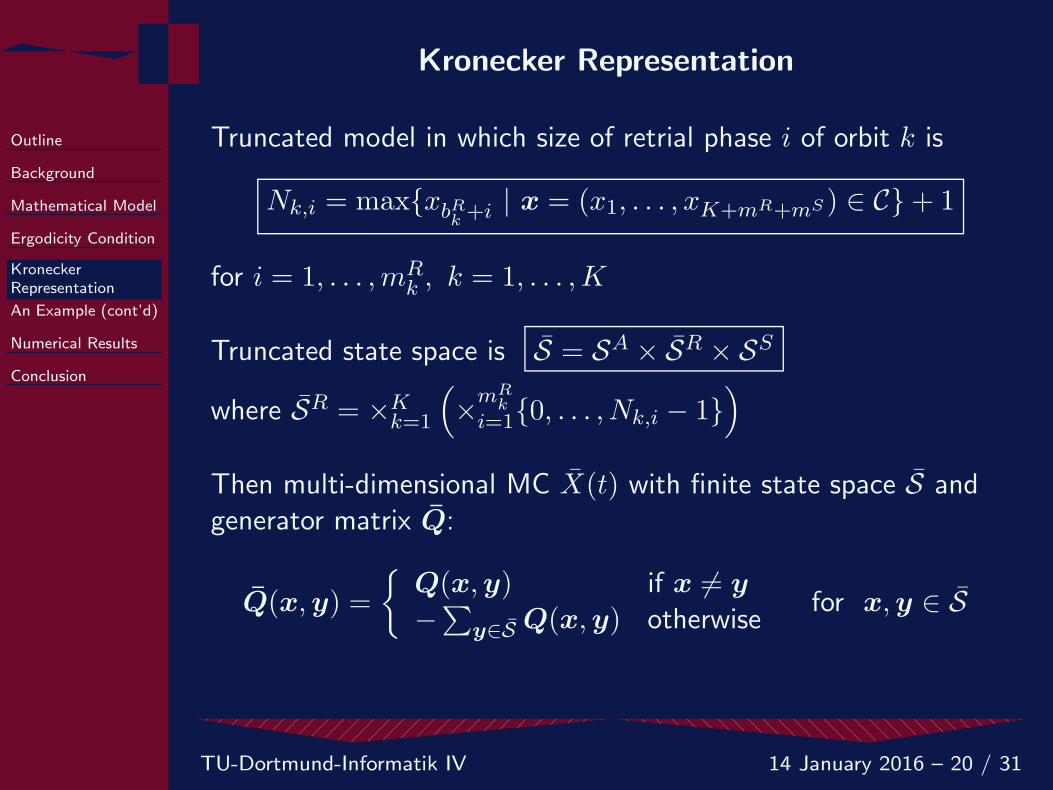
Truncated model in which size of retrial phase i of orbit k is
Nk,i = max{xbRk+i | x = (x1, . . . , xK+mR+mS ) ∈ C}+ 1
for i = 1, . . . ,mRk , k = 1, . . . ,K
Truncated state space is S = SA × SR × SS
where SR = ×Kk=1
(
×mR
k
i=1{0, . . . , Nk,i − 1})
Then multi-dimensional MC X(t) with finite state space S andgenerator matrix Q:
Q(x,y) =
{
Q(x,y) if x 6= y
−∑
y∈S Q(x,y) otherwisefor x,y ∈ S
Kronecker Representation (cont’d)
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
An Example (cont’d)
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 21 / 31
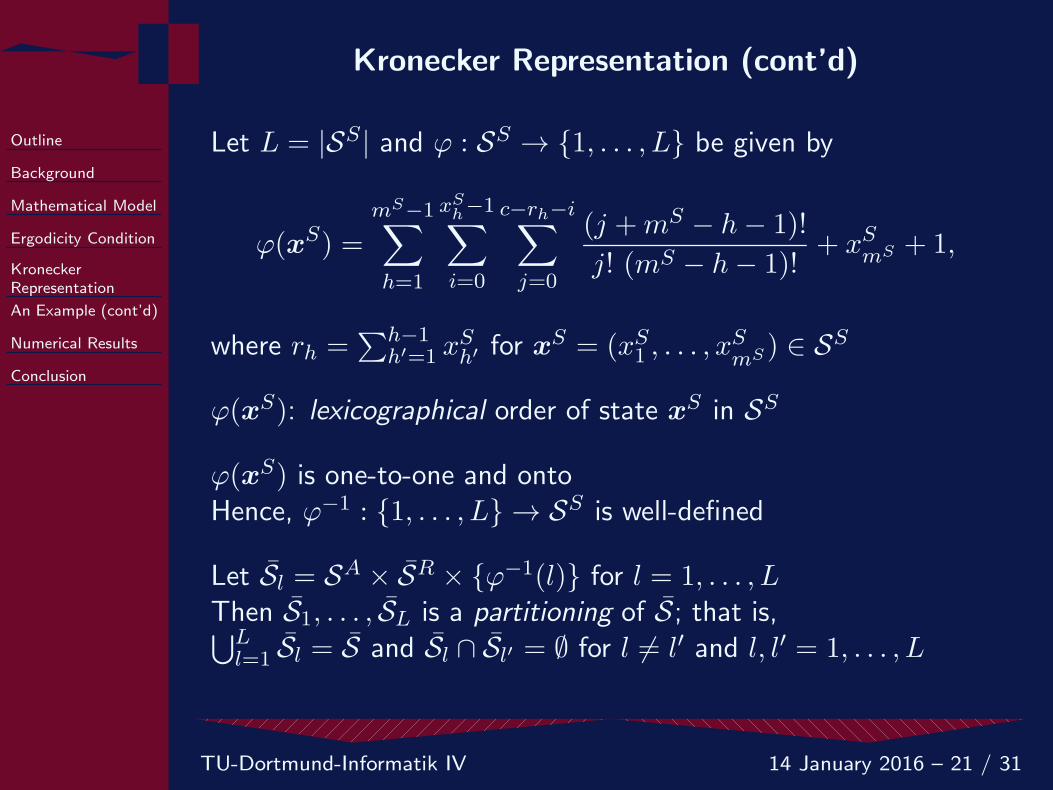
Let L = |SS | and ϕ : SS → {1, . . . , L} be given by
ϕ(xS) =mS−1∑
h=1
xSh−1
∑
i=0
c−rh−i∑
j=0
(j +mS − h− 1)!
j! (mS − h− 1)!+ xSmS + 1,
where rh =∑h−1
h′=1 xSh′ for xS = (xS1 , . . . , x
SmS ) ∈ SS
ϕ(xS): lexicographical order of state xS in SS
ϕ(xS) is one-to-one and ontoHence, ϕ−1 : {1, . . . , L} → SS is well-defined
Let Sl = SA × SR × {ϕ−1(l)} for l = 1, . . . , LThen S1, . . . , SL is a partitioning of S; that is,⋃L
l=1 Sl = S and Sl ∩ Sl′ = ∅ for l 6= l′ and l, l′ = 1, . . . , L

Kronecker Representation (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 22 / 31
The truncated generator matrix is
Q = Qoff
+ diag(−Qoff
e)
where
Qoff
=
Qoff1,1 . . . Q
off1,L
.... . .
...
QoffL,1 . . . Q
offL,L
Let auxiliary matrices with transitions among subsystems corresponding to phasesof arrival processes be
W (C,k′) = (⊗k′−1
k=1 ImAk) ⊗C
offk′ ⊗ (
⊗Kk=k′+1 ImA
k)
W (D,k′) = (⊗k′−1
k=1 ImAk) ⊗Dk′ ⊗ (
⊗Kk=k′+1 ImA
k)
for k′ = 1, . . . ,K, where matrix Coffk′ includes only off-diagonal elements of Ck′

Kronecker Representation (cont’d)
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
An Example (cont’d)
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 23 / 31
For n ∈ Z≥0, let
E−n (i, j) =
{
i if j = i− 10 otherwise
, E+n (i, j) =
{
1 if j = i+ 10 otherwise
for i, j = 0, . . . , n− 1
Then auxiliary matrices with transitions among subsystemscorresponding to phases of retrial processes are
A(k′,i′) =K⊗
k=1
mRk
⊗
h=1
A(k′,i′)k,h , R(k′,i′,j′) =
K⊗
k=1
mRk
⊗
h=1
R(k′,i′,j′)k,h
S(k′,i′) =
K⊗
k=1
mRk
⊗
h=1
S(k′,i′)k,h ,

Kronecker Representation (cont’d)
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
An Example (cont’d)
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 24 / 31
where
A(k′,i′)k,h =
{
E+Nk,h
if k = k′ and h = i′
INk,hotherwise
R(k′,i′,j′)k,h =
E−Nk,h
if k = k′ and h = i′
E+Nk,h
if k = k′ and h = j′
INk,hotherwise
S(k′,i′)k,h =
{
E−Nk,h
if k = k′ and h = i′
INk,hotherwise
for i′, j′, h = 1, . . . ,mRk , i′ 6= j′, k, k′ = 1, . . . ,K
T. Dayar, M. C. Orhan, On vector-Kronecker productmultiplication with rectangular factors, SISC 37(5), 2015.
Kronecker Representation (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 25 / 31
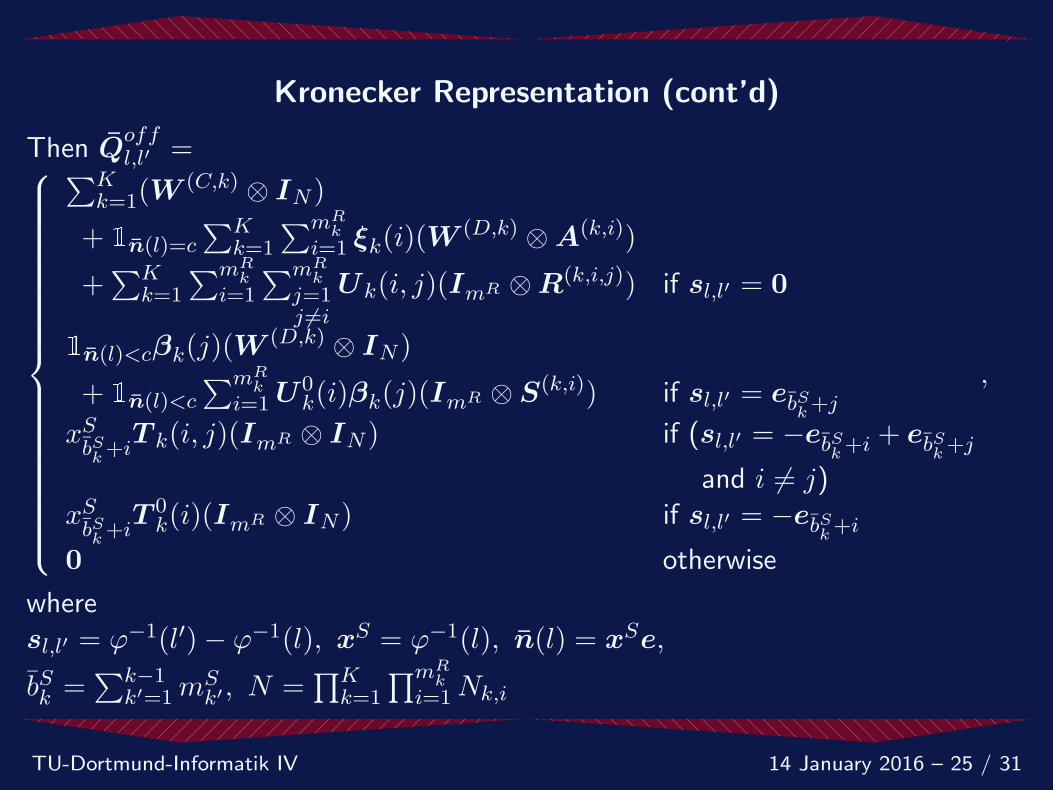
Then Qoffl,l′ =
∑Kk=1(W
(C,k) ⊗ IN )
+ 1n(l)=c
∑Kk=1
∑mRk
i=1 ξk(i)(W(D,k) ⊗A(k,i))
+∑K
k=1
∑mRk
i=1
∑mRk
j=1j 6=i
Uk(i, j)(ImR ⊗R(k,i,j)) if sl,l′ = 0
1n(l)<cβk(j)(W(D,k) ⊗ IN )
+ 1n(l)<c
∑mRk
i=1U0k(i)βk(j)(ImR ⊗ S(k,i)) if sl,l′ = ebS
k+j
xSbSk+iT k(i, j)(ImR ⊗ IN ) if (sl,l′ = −ebS
k+i + ebS
k+j
and i 6= j)xSbSk+iT 0
k(i)(ImR ⊗ IN ) if sl,l′ = −ebSk+i
0 otherwise
,
wheresl,l′ = ϕ−1(l′)− ϕ−1(l), xS = ϕ−1(l), n(l) = xSe,
bSk =∑k−1
k′=1mSk′ , N =
∏Kk=1
∏mRk
i=1Nk,i

An Example (cont’d)
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
An Example (cont’d)
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 26 / 31
|SS | = 10, N1,1 = 97, N1,2 = 111, N2,1 = 139ϕ(0, 0, 0) = 1, ϕ(0, 0, 1) = 2, ϕ(0, 0, 2) = 3, ϕ(0, 1, 0) = 4ϕ(0, 1, 1) = 5, ϕ(0, 2, 0) = 6, ϕ(1, 0, 0) = 7, ϕ(1, 0, 1) = 8ϕ(1, 1, 0) = 9, ϕ(2, 0, 0) = 10
Hence, Qoff
includes 100 blocks and the auxiliary matrices are
Coff1 =
[
0 0.80 0
]
2×2
, Coff2 = [0]1×1, A(1,1) = E+
N1,1⊗IN1,2
⊗IN2,1
A(1,2) = IN1,1⊗E+
N1,2⊗ IN2,1
, A(2,1) = IN1,1⊗ IN1,2
⊗E+N2,1
R(1,1,2) = E−N1,1
⊗E+N1,2
⊗IN2,1, R(1,2,1) = E+
N1,1⊗E−
N1,2⊗IN2,1
S(1,1) = E−N1,1
⊗ IN1,2⊗ IN2,1
, S(1,2) = IN1,1⊗E−
N1,2⊗ IN2,1
S(2,1) = IN1,1⊗ IN1,2
⊗E−N2,1
, W (C,1) = Coff1 ⊗ I1
W (C,2) = I2 ⊗Coff2 , W (D,1) = D1 ⊗ I1, W (D,2) = I2 ⊗D2

An Example (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 27 / 31
The nonzero blocks of Qoff
are
Q1,1 = Q2,2 = Q4,4 = Q7,7 = (W (C,1) ⊗ IN ) + (I2 ⊗R(1,1,2))
Q3,3 = Q5,5 = Q6,6 = Q8,8 = Q9,9 = Q10,10
= (W (C,1) ⊗ IN ) + (W (D,1) ⊗A(1,1)) + (W (D,2) ⊗A(2,1)) + (I2 ⊗R(1,1,2))
Q1,2 = Q2,3 = Q4,5 = Q7,8 = (W (D,2) ⊗ IN ) + 0.5(I2 ⊗ S(2,1))
Q1,4 = Q2,5 = Q4,6 = Q7,9 = 0.25(W (D,1) ⊗ IN ) + 0.25(I2 ⊗ S(1,2))
Q1,7 = Q2,8 = Q4,9 = Q7,10 = 0.75(W (D,1) ⊗ IN ) + 0.75(I2 ⊗ S(1,2))
Q4,1 = Q5,2 = Q7,4 = Q8,5 = Q9,6 = Q9,7 = 0.25I2N
Q7,1 = Q8,2 = Q9,4 = 0.75I2N
Q2,1 = Q5,4 = Q6,4 = Q8,7 = Q10,9 = 0.5I2N , Q3,2 = I2N , Q10,7 = 1.5I2N

Numerical Results
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 28 / 31
Kronecker solver built on the Nsolve package of the APNNtoolbox to
■ obtain truncated state space of the model■ generate Kronecker structured matrix of truncated model■ compute steady-state solution using SOR with ω = 0.9
||πQ||∞ < 10−15
Six different models with ǫ = 0.2
ERL1: model introduced in our exampleERL2: (0.75C1, 0.75D1)ERL3: (0.5C1, 0.5D1)
EXP1: ERL1 except retrial time of class 1 customers ≈ exp(0.5)EXP2: EXP1 except (0.75C1, 0.75D1)EXP3: EXP1 except (0.5C1, 0.5D1)

Numerical Results (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 29 / 31
Traffic intensity: ρ = (∑K
k=1 λk/µk)c−1
|S|: # of states in truncated state space
E1,1: average # of class 1 customers in retrial phase 1E1,2: average # of class 1 customers in retrial phase 2E2,1: average # of class 2 customers in retrial phase 1
Pblock: probability of finding all servers busy
||πQ||1: 1-norm of the residual vector of the truncated model||πQ||1: 1-norm of the residual vector of the infinite model
||πQ||1 =∑
x∈S
|r(x)−∑
y 6∈S
π(x)Q(x,y)|+∑
x∈S
∑
y 6∈S
π(x)Q(x,y) with r = πQ

Numerical Results (cont’d)
TU-Dortmund-Informatik IV 14 January 2016 – 30 / 31
λ1/µ1 > λ2/µ2 and δ1 = δ2
Hence, # in orbit 1 increases faster than # in orbit 2
Table 1: Numerical resultsModel ρ |S| E1,1 E1,2 E2,1 Pblock ||πQ||1 ||πQ||1ERL1 0.8 29, 932, 260 0.2584 2.0165 2.8985 0.6784 9e− 14 9e− 14ERL2 0.6 811, 800 0.1097 0.4422 0.6756 0.4164 2e− 14 2e− 12ERL3 0.4 12, 800 0.0317 0.0860 0.1511 0.2048 6e− 15 7e− 6EXP1 0.8 270, 400 3.1663 2.5486 0.6755 8e− 14 8e− 14EXP2 0.6 25, 600 0.7154 0.6302 0.4142 2e− 14 2e− 11EXP3 0.4 1, 600 0.1464 0.1461 0.2038 4e− 15 6e− 6

Conclusion
Outline
Background
Mathematical Model
Ergodicity Condition
KroneckerRepresentation
Numerical Results
Conclusion
TU-Dortmund-Informatik IV 14 January 2016 – 31 / 31
In ERL1, ERL2, and ERL3,E1,2/E1,1 is larger when Pblock is larger
# in orbit 1 of ERLi < # in orbit 1 of EXPi for i = 1, 2, 3since customers in phase 1 in ERLi are not blockedif they retry when all servers are busy
Because servers are less likely to be captured by class 1 customersin EXPi, # in orbit 2 of ERLi is larger than that of EXPi
Relative difference between average numbers of retrial customersin ERLi and EXPi becomes relatively large as ρ increases.
Relative difference between blocking probabilities is around 0.005.
In general, truncation error is larger than numerical error.
As ρ increases, choosing a smaller ǫ value does not introduceadditional inaccuracy to the computed solution