structural stability of biochemical networks: …
TRANSCRIPT

8th IFAC Symposium on Robust Control Design ROCOND’15Bratislava, Slovenská Republika
July 10, 2015
STRUCTURAL STABILITY OFBIOCHEMICAL NETWORKS:
QUADRATIC VS. POLYHEDRALLYAPUNOV FUNCTIONS
Franco Blanchini and Giulia Giordano

A powerful insight into the features of living matter
Biological systems are extremely robust:fundamental properties are always preserved
despite huge uncertainties and parameter variations
STRUCTURAL ANALYSIS
Can we explain behavioursbased on the systeminherent structure only?
structure graph
motif ←→ structural property
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

A powerful insight into the features of living matter
Biological systems are extremely robust:fundamental properties are always preserved
despite huge uncertainties and parameter variations
STRUCTURAL ANALYSIS
Can we explain behavioursbased on the systeminherent structure only?
structure graph
motif ←→ structural property
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

A powerful insight into the features of living matter
Biological systems are extremely robust:fundamental properties are always preserved
despite huge uncertainties and parameter variations
STRUCTURAL ANALYSIS
Can we explain behavioursbased on the systeminherent structure only?
structure graph
motif ←→ structural property
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

A powerful insight into the features of living matter
Biological systems are extremely robust:fundamental properties are always preserved
despite huge uncertainties and parameter variations
STRUCTURAL ANALYSIS
Can we explain behavioursbased on the systeminherent structure only?
structure graph
motif ←→ structural property
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structural: more than robust
F family of systems, P property
Robust propertyP is robust if any element f ∈ F has the property P.
Structural propertyP is structural if, moreover, F is specified by a “structure”without numerical bounds.
Robust vs. Structural stability
A1 =
[−a bc −d
], A2 =
[−a −bc −d
], a, b, c , d > 0.
A1 is robustly stable if 0 ≤ b, c ≤ 1, 2 ≤ a, d ≤ 3.A2 is structurally stable.
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structural: more than robust
F family of systems, P property
Robust propertyP is robust if any element f ∈ F has the property P.
Structural propertyP is structural if, moreover, F is specified by a “structure”without numerical bounds.
Robust vs. Structural stability
A1 =
[−a bc −d
], A2 =
[−a −bc −d
], a, b, c , d > 0.
A1 is robustly stable if 0 ≤ b, c ≤ 1, 2 ≤ a, d ≤ 3.A2 is structurally stable.
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structural: more than robust
F family of systems, P property
Robust propertyP is robust if any element f ∈ F has the property P.
Structural propertyP is structural if, moreover, F is specified by a “structure”without numerical bounds.
Robust vs. Structural stability
A1 =
[−a bc −d
], A2 =
[−a −bc −d
], a, b, c , d > 0.
A1 is robustly stable if 0 ≤ b, c ≤ 1, 2 ≤ a, d ≤ 3.A2 is structurally stable.
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structural: more than robust
F family of systems, P property
Robust propertyP is robust if any element f ∈ F has the property P.
Structural propertyP is structural if, moreover, F is specified by a “structure”without numerical bounds.
Robust vs. Structural stability
A1 =
[−a bc −d
], A2 =
[−a −bc −d
], a, b, c , d > 0.
A1 is robustly stable if 0 ≤ b, c ≤ 1, 2 ≤ a, d ≤ 3.A2 is structurally stable.
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B, A + Bgab−−⇀↽−−gc
C , Cgc−⇀ D, D
gd−⇀ E , A + Egae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0−gab(a, b) + gc(c)−gae(a, e)
b = b0−gab(a, b) + gc(c)
c = gab(a, b)− gc(c)−gc(c)
d = gc(c)−gd(d)
e = gd(d)−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B
, A + Bgab−−⇀↽−−gc
C , Cgc−⇀ D, D
gd−⇀ E , A + Egae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0
−gab(a, b) + gc(c)−gae(a, e)
b = b0
−gab(a, b) + gc(c)
c =
gab(a, b)− gc(c)−gc(c)
d =
gc(c)−gd(d)
e =
gd(d)−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B, A + Bgab−−⇀↽−−gc
C
, Cgc−⇀ D, D
gd−⇀ E , A + Egae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0−gab(a, b) + gc(c)
−gae(a, e)
b = b0−gab(a, b) + gc(c)
c = gab(a, b)− gc(c)
−gc(c)
d =
gc(c)−gd(d)
e =
gd(d)−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B, A + Bgab−−⇀↽−−gc
C , Cgc−⇀ D
, Dgd−⇀ E , A + E
gae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0−gab(a, b) + gc(c)
−gae(a, e)
b = b0−gab(a, b) + gc(c)
c = gab(a, b)− gc(c)−gc(c)
d = gc(c)
−gd(d)
e =
gd(d)−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B, A + Bgab−−⇀↽−−gc
C , Cgc−⇀ D, D
gd−⇀ E
, A + Egae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0−gab(a, b) + gc(c)
−gae(a, e)
b = b0−gab(a, b) + gc(c)
c = gab(a, b)− gc(c)−gc(c)
d = gc(c)−gd(d)
e = gd(d)
−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks I
Species: A, B , C , . . .
Reactions:
∅ a0−⇀ A, ∅ b0−⇀ B, A + Bgab−−⇀↽−−gc
C , Cgc−⇀ D, D
gd−⇀ E , A + Egae−−⇀ ∅
Concentrations: a, b, c , . . .
ODE system:
a = a0−gab(a, b) + gc(c)−gae(a, e)
b = b0−gab(a, b) + gc(c)
c = gab(a, b)− gc(c)−gc(c)
d = gc(c)−gd(d)
e = gd(d)−gae(a, e)
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks II
ODE system:
a
bc
de
=
−1 −1 1 0 00 −1 1 0 00 1 −1 −1 00 0 0 1 −1−1 0 0 0 1
︸ ︷︷ ︸
S = stoichiometric matrix
gae(a, e)gab(a, b)gc(c)gc(c)gd(d)
︸ ︷︷ ︸
g = rate
+
a0b0000
︸ ︷︷ ︸
g0 = influx
Graph:
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks II
ODE system:
a
bc
de
=
−1 −1 1 0 00 −1 1 0 00 1 −1 −1 00 0 0 1 −1−1 0 0 0 1
︸ ︷︷ ︸
S = stoichiometric matrix
gae(a, e)gab(a, b)gc(c)gc(c)gd(d)
︸ ︷︷ ︸
g = rate
+
a0b0000
︸ ︷︷ ︸
g0 = influx
Graph:
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

(Bio)chemical reaction networks II
ODE system:
a
bc
de
=
−1 −1 1 0 00 −1 1 0 00 1 −1 −1 00 0 0 1 −1−1 0 0 0 1
︸ ︷︷ ︸
S = stoichiometric matrix
gae(a, e)gab(a, b)gc(c)gc(c)gd(d)
︸ ︷︷ ︸
g = rate
+
a0b0000
︸ ︷︷ ︸
g0 = influx
Graph:
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

General nonlinear model
Nonlinear model
x(t) = Sg(x(t)) + g0
S stoichiometric matrix
Reaction rate functions g : nonnegative and monotonicConstant influx vector g0 ≥ 0Dissipative reactions: ∂xi
∂xi< 0
Positive system
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

General nonlinear model
Nonlinear model
x(t) = Sg(x(t)) + g0
S stoichiometric matrixReaction rate functions g : nonnegative and monotonic
Constant influx vector g0 ≥ 0Dissipative reactions: ∂xi
∂xi< 0
Positive system
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

General nonlinear model
Nonlinear model
x(t) = Sg(x(t)) + g0
S stoichiometric matrixReaction rate functions g : nonnegative and monotonicConstant influx vector g0 ≥ 0
Dissipative reactions: ∂xi∂xi
< 0Positive system
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

General nonlinear model
Nonlinear model
x(t) = Sg(x(t)) + g0
S stoichiometric matrixReaction rate functions g : nonnegative and monotonicConstant influx vector g0 ≥ 0Dissipative reactions: ∂xi
∂xi< 0
Positive system
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems
General nonlinear model
Nonlinear model
x(t) = Sg(x(t)) + g0
S stoichiometric matrixReaction rate functions g : nonnegative and monotonicConstant influx vector g0 ≥ 0Dissipative reactions: ∂xi
∂xi< 0
Positive system
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Absorb the nonlinear model in a LDI
x(t) = Sg(x(t)) + g0
Idea: g(a, b) − g(a, b) =g(a, b) − g(a, b)
(a− a)︸ ︷︷ ︸δa(a,b)
(a− a) +g(a, b) − g(a, b)
(b − b)︸ ︷︷ ︸δb(a,b)
(b − b)
Linear Differential Inclusionz.
= x − x , Sg(x) + g0 = 0
z(t) = S [g(z(t) + x)− g(x)] = BD(z(t))Cz(t)
D(z(t)) diagonal positive matrix of partial derivatives
The Jacobian of the original system at the equilibrium has the form
J = BDC
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Absorb the nonlinear model in a LDI
x(t) = Sg(x(t)) + g0
Idea: g(a, b) − g(a, b) =g(a, b) − g(a, b)
(a− a)︸ ︷︷ ︸δa(a,b)
(a− a) +g(a, b) − g(a, b)
(b − b)︸ ︷︷ ︸δb(a,b)
(b − b)
Linear Differential Inclusionz.
= x − x , Sg(x) + g0 = 0
z(t) = S [g(z(t) + x)− g(x)] = BD(z(t))Cz(t)
D(z(t)) diagonal positive matrix of partial derivatives
The Jacobian of the original system at the equilibrium has the form
J = BDC
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Absorb the nonlinear model in a LDI
x(t) = Sg(x(t)) + g0
Idea: g(a, b) − g(a, b) =g(a, b) − g(a, b)
(a− a)︸ ︷︷ ︸δa(a,b)
(a− a) +g(a, b) − g(a, b)
(b − b)︸ ︷︷ ︸δb(a,b)
(b − b)
Linear Differential Inclusionz.
= x − x , Sg(x) + g0 = 0
z(t) = S [g(z(t) + x)− g(x)] = BD(z(t))Cz(t)
D(z(t)) diagonal positive matrix of partial derivatives
The Jacobian of the original system at the equilibrium has the form
J = BDC
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Absorb the nonlinear model in a LDI
x(t) = Sg(x(t)) + g0
Idea: g(a, b) − g(a, b) =g(a, b) − g(a, b)
(a− a)︸ ︷︷ ︸δa(a,b)
(a− a) +g(a, b) − g(a, b)
(b − b)︸ ︷︷ ︸δb(a,b)
(b − b)
Linear Differential Inclusionz.
= x − x , Sg(x) + g0 = 0
z(t) = S [g(z(t) + x)− g(x)] = BD(z(t))Cz(t)
D(z(t)) diagonal positive matrix of partial derivatives
The Jacobian of the original system at the equilibrium has the form
J = BDC
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

BDC–decomposition: example
z = BDCz ,
D � 0
D = diag{∂gab∂a
,∂gab∂b
,∂gc∂c
,∂gc∂c
,∂gd∂d
,∂gae∂a
,∂gae∂e
}
B =
−1 −1 1 0 0 −1 −1−1 −1 1 0 0 0 0
1 1 −1 −1 0 0 00 0 0 1 −1 0 00 0 0 0 1 −1 −1
and C =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 1 0 00 0 0 1 01 0 0 0 00 0 0 0 1
Structure: parameter free, no numerical boundsHow can we structurally assess stability (for any Di > 0)?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

BDC–decomposition: example
z = BDCz ,
D � 0
D = diag{∂gab∂a
,∂gab∂b
,∂gc∂c
,∂gc∂c
,∂gd∂d
,∂gae∂a
,∂gae∂e
}
B =
−1 −1 1 0 0 −1 −1−1 −1 1 0 0 0 0
1 1 −1 −1 0 0 00 0 0 1 −1 0 00 0 0 0 1 −1 −1
and C =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 1 0 00 0 0 1 01 0 0 0 00 0 0 0 1
Structure: parameter free, no numerical boundsHow can we structurally assess stability (for any Di > 0)?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

BDC–decomposition: example
z = BDCz ,
D � 0
D = diag{∂gab∂a
,∂gab∂b
,∂gc∂c
,∂gc∂c
,∂gd∂d
,∂gae∂a
,∂gae∂e
}
B =
−1 −1 1 0 0 −1 −1−1 −1 1 0 0 0 0
1 1 −1 −1 0 0 00 0 0 1 −1 0 00 0 0 0 1 −1 −1
and C =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 1 0 00 0 0 1 01 0 0 0 00 0 0 0 1
Structure: parameter free, no numerical boundsHow can we structurally assess stability (for any Di > 0)?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

BDC–decomposition: example
z = BDCz ,
D � 0
D = diag{∂gab∂a
,∂gab∂b
,∂gc∂c
,∂gc∂c
,∂gd∂d
,∂gae∂a
,∂gae∂e
}
B =
−1 −1 1 0 0 −1 −1−1 −1 1 0 0 0 0
1 1 −1 −1 0 0 00 0 0 1 −1 0 00 0 0 0 1 −1 −1
and C =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 1 0 00 0 0 1 01 0 0 0 00 0 0 0 1
Structure: parameter free, no numerical boundsHow can we structurally assess stability (for any Di > 0)?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structurally assess stability: Lyapunov functions
Quadratic functions
VP(x) = x>Px ,P positive definite matrix
Polyhedral functions
VX (x) = inf{‖w‖1 : Xw = x},X full row rank matrix
conservative
��
��
��
��
��������������������
non–conservativefor proving robust stability of linear differential inclusionsBrayton & Tong (1980), Molchanov & Pyatnitsky (1986, 1989)
Are quadratic functions suitable for our reaction networks?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structurally assess stability: Lyapunov functions
Quadratic functions
VP(x) = x>Px ,P positive definite matrix
Polyhedral functions
VX (x) = inf{‖w‖1 : Xw = x},X full row rank matrix
conservative
��
��
��
��
��������������������
non–conservativefor proving robust stability of linear differential inclusionsBrayton & Tong (1980), Molchanov & Pyatnitsky (1986, 1989)
Are quadratic functions suitable for our reaction networks?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structurally assess stability: Lyapunov functions
Quadratic functions
VP(x) = x>Px ,P positive definite matrix
Polyhedral functions
VX (x) = inf{‖w‖1 : Xw = x},X full row rank matrix
conservative
��
��
��
��
��������������������
non–conservativefor proving robust stability of linear differential inclusionsBrayton & Tong (1980), Molchanov & Pyatnitsky (1986, 1989)
Are quadratic functions suitable for our reaction networks?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Structurally assess stability: Lyapunov functions
Quadratic functions
VP(x) = x>Px ,P positive definite matrix
Polyhedral functions
VX (x) = inf{‖w‖1 : Xw = x},X full row rank matrix
conservative
��
��
��
��
��������������������
non–conservativefor proving robust stability of linear differential inclusionsBrayton & Tong (1980), Molchanov & Pyatnitsky (1986, 1989)
Are quadratic functions suitable for our reaction networks?
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Polyhedral Lyapunov functions: a numeric procedure
Idea: associate the Linear Differential Inclusion (1)with a Discrete Difference Inclusion (2)
such that (1) robustly stable iff (2) robustly stablewith the same (weak) polyhedral Lyapunov function
Based on (2), numerical algorithm computes the unit ball ofthe polyhedral Lyapunov function (if any) via set iteration
The procedure converges=⇒ structurally stable
F. Blanchini and G. Giordano, “Piecewise-linear Lyapunov Functions forStructural Stability of Biochemical Networks”, Automatica, vol. 50, n. 10,pp. 2482–2493, 2014
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Polyhedral Lyapunov functions: a numeric procedure
Idea: associate the Linear Differential Inclusion (1)with a Discrete Difference Inclusion (2)
such that (1) robustly stable iff (2) robustly stablewith the same (weak) polyhedral Lyapunov function
Based on (2), numerical algorithm computes the unit ball ofthe polyhedral Lyapunov function (if any) via set iteration
The procedure converges=⇒ structurally stable
F. Blanchini and G. Giordano, “Piecewise-linear Lyapunov Functions forStructural Stability of Biochemical Networks”, Automatica, vol. 50, n. 10,pp. 2482–2493, 2014
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Polyhedral Lyapunov functions: a numeric procedure
Idea: associate the Linear Differential Inclusion (1)with a Discrete Difference Inclusion (2)
such that (1) robustly stable iff (2) robustly stablewith the same (weak) polyhedral Lyapunov function
Based on (2), numerical algorithm computes the unit ball ofthe polyhedral Lyapunov function (if any) via set iteration
The procedure converges=⇒ structurally stable
F. Blanchini and G. Giordano, “Piecewise-linear Lyapunov Functions forStructural Stability of Biochemical Networks”, Automatica, vol. 50, n. 10,pp. 2482–2493, 2014
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
B
Bimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs I
Monomolecular reactions chain: ∅ a0−⇀ Ag(a)−−⇀ B
g(b)−−⇀ ∅
a = a0 − ga(a)
b = ga(a)− gb(b)
J =
[−α 0α −β
]α = ∂ga/∂a, β = ∂gb/∂b
No P � 0 exists s.t. J>P + PJ � 0 for any choice of α, β > 0
Polyhedral Lyapunov function with X = I2=⇒ Structurally stable, but not quadratically!
Reversible monomolecularreaction: A
g(a)−−⇀↽−−g(b)
BBimolecular reaction: ∅ a0−⇀ A,
∅ b0−⇀ B , A + Bg(a, b)−−−−⇀ ∅
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

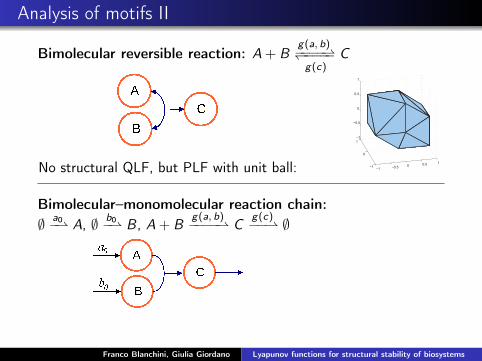
Analysis of motifs II
Bimolecular reversible reaction: A + Bg(a, b)−−−−⇀↽−−−−g(c)
C
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
0
1
−1
−0.5
0
0.5
1
Bimolecular–monomolecular reaction chain:∅ a0−⇀ A, ∅ b0−⇀ B , A + B
g(a, b)−−−−⇀ Cg(c)−−⇀ ∅
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs II
Bimolecular reversible reaction: A + Bg(a, b)−−−−⇀↽−−−−g(c)
C
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
0
1
−1
−0.5
0
0.5
1
Bimolecular–monomolecular reaction chain:∅ a0−⇀ A, ∅ b0−⇀ B , A + B
g(a, b)−−−−⇀ Cg(c)−−⇀ ∅
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems
Analysis of motifs II
Bimolecular reversible reaction: A + Bg(a, b)−−−−⇀↽−−−−g(c)
C
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
0
1
−1
−0.5
0
0.5
1
Bimolecular–monomolecular reaction chain:∅ a0−⇀ A, ∅ b0−⇀ B , A + B
g(a, b)−−−−⇀ Cg(c)−−⇀ ∅
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Analysis of motifs II
Bimolecular reversible reaction: A + Bg(a, b)−−−−⇀↽−−−−g(c)
C
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
0
1
−1
−0.5
0
0.5
1
Bimolecular–monomolecular reaction chain:∅ a0−⇀ A, ∅ b0−⇀ B , A + B
g(a, b)−−−−⇀ Cg(c)−−⇀ ∅
No structural QLF, but PLF with unit ball: −1−0.5
00.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Example
∅ a0−⇀ Ag(a)−−⇀ B + C , B
g(b)−−⇀ ∅, A + Cg(a, c)−−−−⇀ ∅
a = a0 − ga(a)− gac(a, c)
b = ga(a)− gb(b)
c = ga(a)− gac(a, c)
J3 =
−(α + δ) 0 −γα −β 0
α− δ 0 −γ
α = ∂ga/∂a, β = ∂gb/∂b,γ = ∂gac/∂c , δ = ∂gac/∂a
Not structurally quadratically stable,but structurally stable!
Polyhedral Lyapunov function with unit ball:
−1−0.5
00.5
1
−1−0.5
00.5
1−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Example
∅ a0−⇀ Ag(a)−−⇀ B + C , B
g(b)−−⇀ ∅, A + Cg(a, c)−−−−⇀ ∅
a = a0 − ga(a)− gac(a, c)
b = ga(a)− gb(b)
c = ga(a)− gac(a, c)
J3 =
−(α + δ) 0 −γα −β 0
α− δ 0 −γ
α = ∂ga/∂a, β = ∂gb/∂b,γ = ∂gac/∂c , δ = ∂gac/∂a
Not structurally quadratically stable,but structurally stable!
Polyhedral Lyapunov function with unit ball:
−1−0.5
00.5
1
−1−0.5
00.5
1−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Example
∅ a0−⇀ Ag(a)−−⇀ B + C , B
g(b)−−⇀ ∅, A + Cg(a, c)−−−−⇀ ∅
a = a0 − ga(a)− gac(a, c)
b = ga(a)− gb(b)
c = ga(a)− gac(a, c)
J3 =
−(α + δ) 0 −γα −β 0
α− δ 0 −γ
α = ∂ga/∂a, β = ∂gb/∂b,γ = ∂gac/∂c , δ = ∂gac/∂a
Not structurally quadratically stable,but structurally stable!
Polyhedral Lyapunov function with unit ball:
−1−0.5
00.5
1
−1−0.5
00.5
1−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Example
∅ a0−⇀ Ag(a)−−⇀ B + C , B
g(b)−−⇀ ∅, A + Cg(a, c)−−−−⇀ ∅
a = a0 − ga(a)− gac(a, c)
b = ga(a)− gb(b)
c = ga(a)− gac(a, c)
J3 =
−(α + δ) 0 −γα −β 0
α− δ 0 −γ
α = ∂ga/∂a, β = ∂gb/∂b,γ = ∂gac/∂c , δ = ∂gac/∂a
Not structurally quadratically stable,but structurally stable!
Polyhedral Lyapunov function with unit ball:
−1−0.5
00.5
1
−1−0.5
00.5
1−1
−0.5
0
0.5
1
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Summary
Structural stability of (bio)chemical reaction networks:polyhedral vs. quadratic Lyapunov functions.
Set of basic motifs: structurally stable with polyhedralLyapunov functions, but not quadratically.
For any network that contains one of these motifs,quadratic Lyapunov functions are not suitable.
Yet, for the same network, structural stability may be provedvia polyhedral Lyapunov functions.
Examples are:enzymatic reactions gene expression metabolic networks
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Summary
Structural stability of (bio)chemical reaction networks:polyhedral vs. quadratic Lyapunov functions.
Set of basic motifs: structurally stable with polyhedralLyapunov functions, but not quadratically.
For any network that contains one of these motifs,quadratic Lyapunov functions are not suitable.
Yet, for the same network, structural stability may be provedvia polyhedral Lyapunov functions.
Examples are:enzymatic reactions gene expression metabolic networks
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Summary
Structural stability of (bio)chemical reaction networks:polyhedral vs. quadratic Lyapunov functions.
Set of basic motifs: structurally stable with polyhedralLyapunov functions, but not quadratically.
For any network that contains one of these motifs,quadratic Lyapunov functions are not suitable.
Yet, for the same network, structural stability may be provedvia polyhedral Lyapunov functions.
Examples are:enzymatic reactions gene expression metabolic networks
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Summary
Structural stability of (bio)chemical reaction networks:polyhedral vs. quadratic Lyapunov functions.
Set of basic motifs: structurally stable with polyhedralLyapunov functions, but not quadratically.
For any network that contains one of these motifs,quadratic Lyapunov functions are not suitable.
Yet, for the same network, structural stability may be provedvia polyhedral Lyapunov functions.
Examples are:enzymatic reactions gene expression metabolic networks
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Summary
Structural stability of (bio)chemical reaction networks:polyhedral vs. quadratic Lyapunov functions.
Set of basic motifs: structurally stable with polyhedralLyapunov functions, but not quadratically.
For any network that contains one of these motifs,quadratic Lyapunov functions are not suitable.
Yet, for the same network, structural stability may be provedvia polyhedral Lyapunov functions.
Examples are:enzymatic reactions gene expression metabolic networks
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Conclusions
Unfortunately, quadratic Lyapunov functions(well known to be conservative for robust stability of LDIs)cannot help in our setup.
Polyhedral Lyapunov functions: promising tool for assessingstructural stability of biochemical networks.
Ďakujem!
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Conclusions
Unfortunately, quadratic Lyapunov functions(well known to be conservative for robust stability of LDIs)cannot help in our setup.
Polyhedral Lyapunov functions: promising tool for assessingstructural stability of biochemical networks.
Ďakujem!
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems

Conclusions
Unfortunately, quadratic Lyapunov functions(well known to be conservative for robust stability of LDIs)cannot help in our setup.
Polyhedral Lyapunov functions: promising tool for assessingstructural stability of biochemical networks.
Ďakujem!
Franco Blanchini, Giulia Giordano Lyapunov functions for structural stability of biosystems