subsea flexible flowline installation
DESCRIPTION
Issues and SolutionsTRANSCRIPT

ENGINEERING SCIENCES
Subsea flexible flowline installation issuesand solutions
Kevin Huang(DMAR Engineering Inc.,Houston,Texas 77094,USA)
Abstract:Flexible flowlines and risers have been increasingly used for deepwater and ultra-deepwater field appli-cations,partially because of its low submerged weight and better dynamic characteristics comparing to rigid pipe-lines. The offshore installation of flowline may have advantages as well. However,it has special needs for the in-stallation aids,and it is challenging to install tie-in structures due to its low bending stiffness. This paper is to pre-sent some of the challenges during a recent flexible installation project with a total of more than 100 km flexibleflowlines,and 24 in-line sleds/pipeline end termination(PLET) in water depth up to 1 300 m.Key words:flexible;installation;normal lay;in-line sled;PLET
1 IntroductionFlexible flowlines have been widely used for
subsea oil and gas field development. Flexible com-prises of a multi- layer structure of helically woundmetallic wires and tapes and extruded thermo-plastics [1,2],and it can be designed to meet the specif-ic requirements for different applications based onconveyed fluid composition,pressure,temperature,water depth, service conditions,etc. It also hasmany other advantages when compared to rigid pipe-lines. However,flexible is still a relatively new con-cept,and its installation could be challenging aswell, especially when pipeline end termination(PLET) and in-line sleds are tied in.
Related publications on flexible installation arestill rare. This paper is the first of its kind to focus onthe flexible flowline installation,i.e. the common is-sues associated with flexible installation,and provideguidelines and recommendations that could lead to so-lutions. Flexible installation includes the major activi-ties such as load out,transpooling,initiation withPLET,normal laying,in- line sled tie- in,buoyancymodule selection, buoyancy module underwatertransfer,PLET/sled landing,and curve laying,etc.In this paper,the flexible initiation and laydown withPLET are discussed in Section 2 and 3 respectively.
During PLET initiation,PLET position control is es-sential to ensure that PLET is landed within theplanned target box,while during PLET laydown,thelayback distance is important to ensure a safe landingof PLET. It is recommended to initiate the 1st endPLET with crane whipline,and abandon the 2nd endPLET with A & R winch combined with buoyancymodules. Then typical issues during in-line sled tie-inare presented in Section 4. The issues include sled up-ending,lowering and landing. Sled maneuvering onthe vessel deck requires a PLET handling system(PHS). The PHS provides accurate control of the sledposition at the worktable in order to be tied in to theflowline. Existence of in-line sled also complicatesthe lowering and landing procedures. After that,thebuoyancy module wet parking and subsea transfer areassessed in Section 5 and 6 respectively. Effect of bot-tom current and rigging snatching loads are the mainareas studied. Then this paper continues to discuss themajor concerns during flowline transpooling in Sec-tion 7. Flexible transpooling is the area that could beeasily overlooked by many installation engineers,while it is one of the activities that incidents occurmost often. Last,flexible curve laying is investigatedin Section 8. Curve laying in strong current could bedifficult;however,it could become much easier ifthe curve stability is well understood,and vessel is
Received 20 March 2013
86
Vol. 11 No.4,Aug. 2013
maneuvered properly based on the current strengthand heading. Another option is to pre- install turningpoints along the lay corridor,which will add extratime to install and recover the turning points.
2 Flowline initiation with PLETFlowline is usually initiated with PLET,just
like rigid pipe flowline. The PLET could be loweredthrough the water column with flexible extending tothe installation vessel,as long as the flexible’s ten-sion capacity is sufficient. When the PLET approachesto the sea floor,it needs to be upended to a level posi-tion,and then landed on the target box. Therefore,the critical stage is this upending process. There aretwo options to consider.
1)Option 1:use buoyancy modules. The buoy-ancy modules could be attached to the PLET either onthe installation vessel,or through underwater trans-fer. When the buoyancy module is attached on the in-stallation vessel,clump weight is also needed to en-sure the PLET sink under water. This would requiresome simultaneous operations (SIMOPs) on the ves-sel. When the buoyancy module is transferred under-water,a wet parking buoyancy module may be neces-
sary,and remotely operated vehicle (ROV) opera-tions are also required.
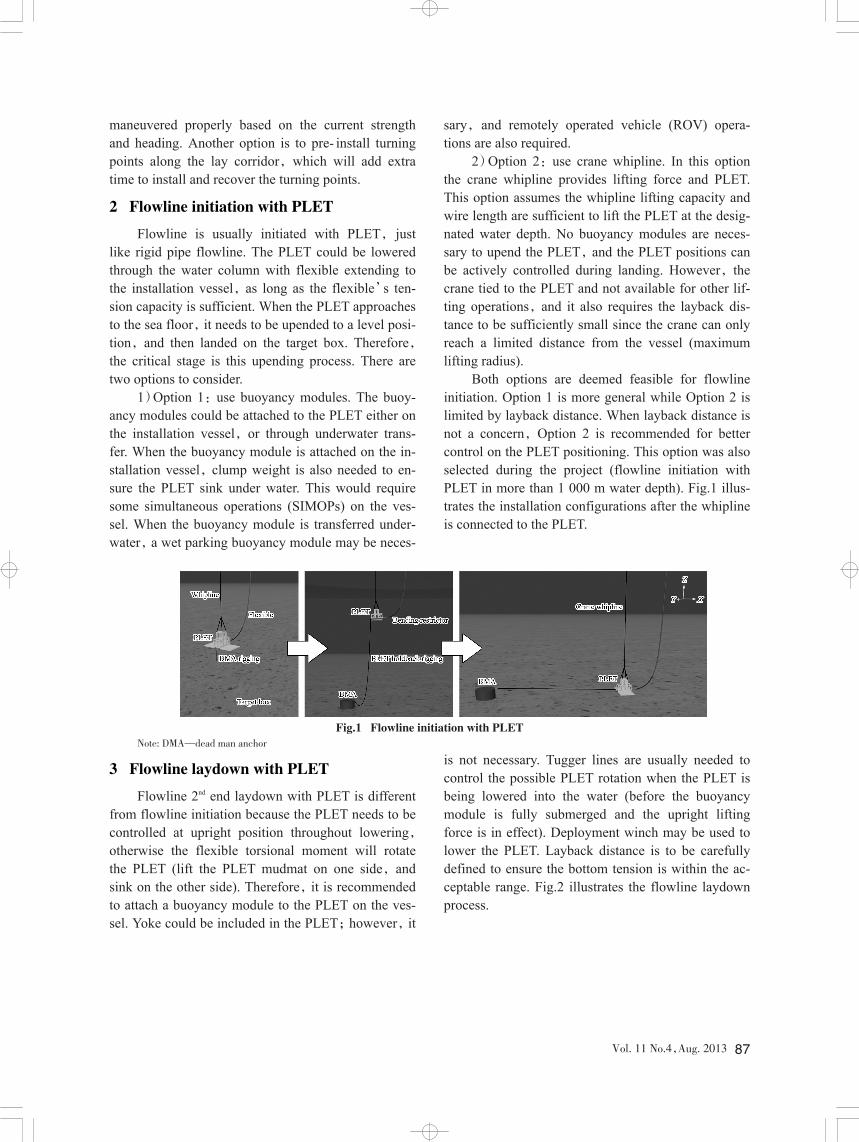
2)Option 2:use crane whipline. In this optionthe crane whipline provides lifting force and PLET.This option assumes the whipline lifting capacity andwire length are sufficient to lift the PLET at the desig-nated water depth. No buoyancy modules are neces-sary to upend the PLET,and the PLET positions canbe actively controlled during landing. However,thecrane tied to the PLET and not available for other lif-ting operations,and it also requires the layback dis-tance to be sufficiently small since the crane can onlyreach a limited distance from the vessel (maximumlifting radius).
Both options are deemed feasible for flowlineinitiation. Option 1 is more general while Option 2 islimited by layback distance. When layback distance isnot a concern,Option 2 is recommended for bettercontrol on the PLET positioning. This option was alsoselected during the project (flowline initiation withPLET in more than 1 000 m water depth). Fig.1 illus-trates the installation configurations after the whiplineis connected to the PLET.
Fig.1 Flowline initiation with PLETNote: DMA—dead man anchor
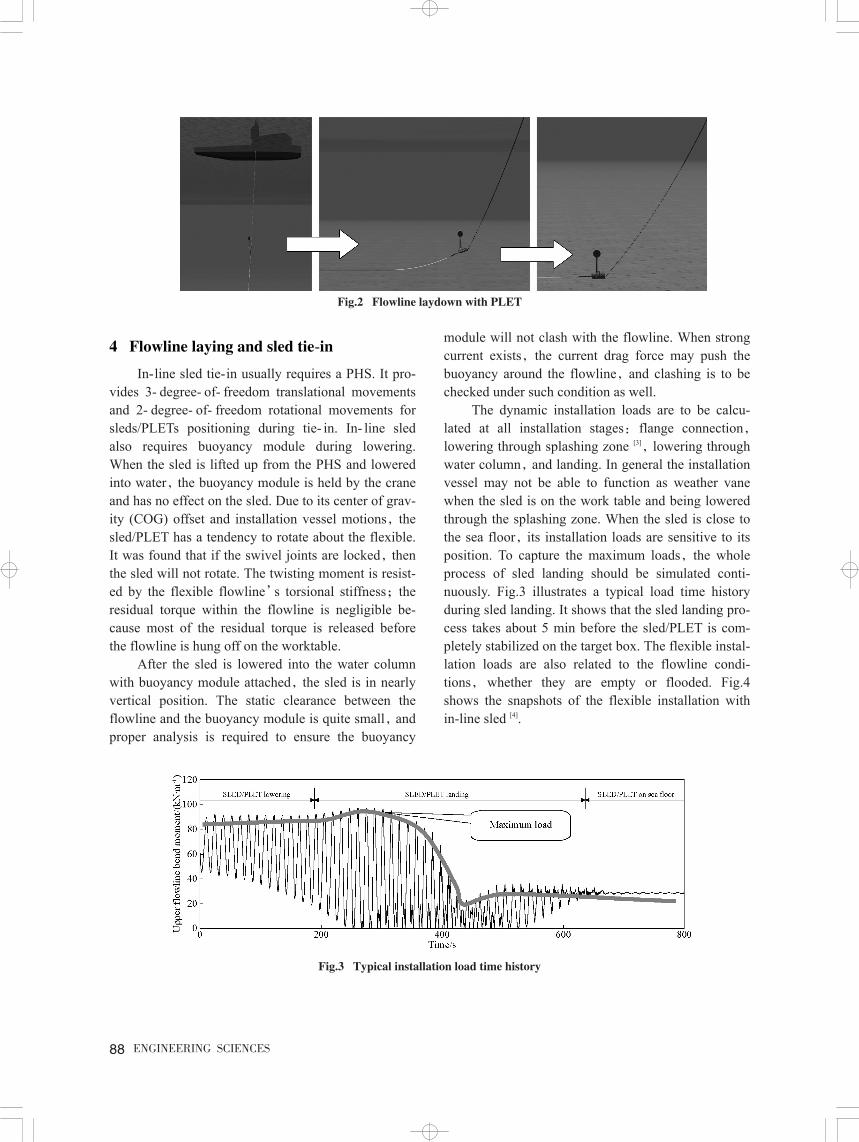
3 Flowline laydown with PLETFlowline 2nd end laydown with PLET is different
from flowline initiation because the PLET needs to becontrolled at upright position throughout lowering,otherwise the flexible torsional moment will rotatethe PLET (lift the PLET mudmat on one side,andsink on the other side). Therefore,it is recommendedto attach a buoyancy module to the PLET on the ves-sel. Yoke could be included in the PLET;however,it
is not necessary. Tugger lines are usually needed tocontrol the possible PLET rotation when the PLET isbeing lowered into the water (before the buoyancymodule is fully submerged and the upright liftingforce is in effect). Deployment winch may be used tolower the PLET. Layback distance is to be carefullydefined to ensure the bottom tension is within the ac-ceptable range. Fig.2 illustrates the flowline laydownprocess.
87
ENGINEERING SCIENCES
Fig.2 Flowline laydown with PLET
4 Flowline laying and sled tie-inIn-line sled tie-in usually requires a PHS. It pro-
vides 3- degree- of- freedom translational movementsand 2- degree- of- freedom rotational movements forsleds/PLETs positioning during tie- in. In- line sledalso requires buoyancy module during lowering.When the sled is lifted up from the PHS and loweredinto water,the buoyancy module is held by the craneand has no effect on the sled. Due to its center of grav-ity (COG) offset and installation vessel motions,thesled/PLET has a tendency to rotate about the flexible.It was found that if the swivel joints are locked,thenthe sled will not rotate. The twisting moment is resist-ed by the flexible flowline’s torsional stiffness;theresidual torque within the flowline is negligible be-cause most of the residual torque is released beforethe flowline is hung off on the worktable.
After the sled is lowered into the water columnwith buoyancy module attached,the sled is in nearlyvertical position. The static clearance between theflowline and the buoyancy module is quite small,andproper analysis is required to ensure the buoyancy
module will not clash with the flowline. When strongcurrent exists,the current drag force may push thebuoyancy around the flowline,and clashing is to bechecked under such condition as well.
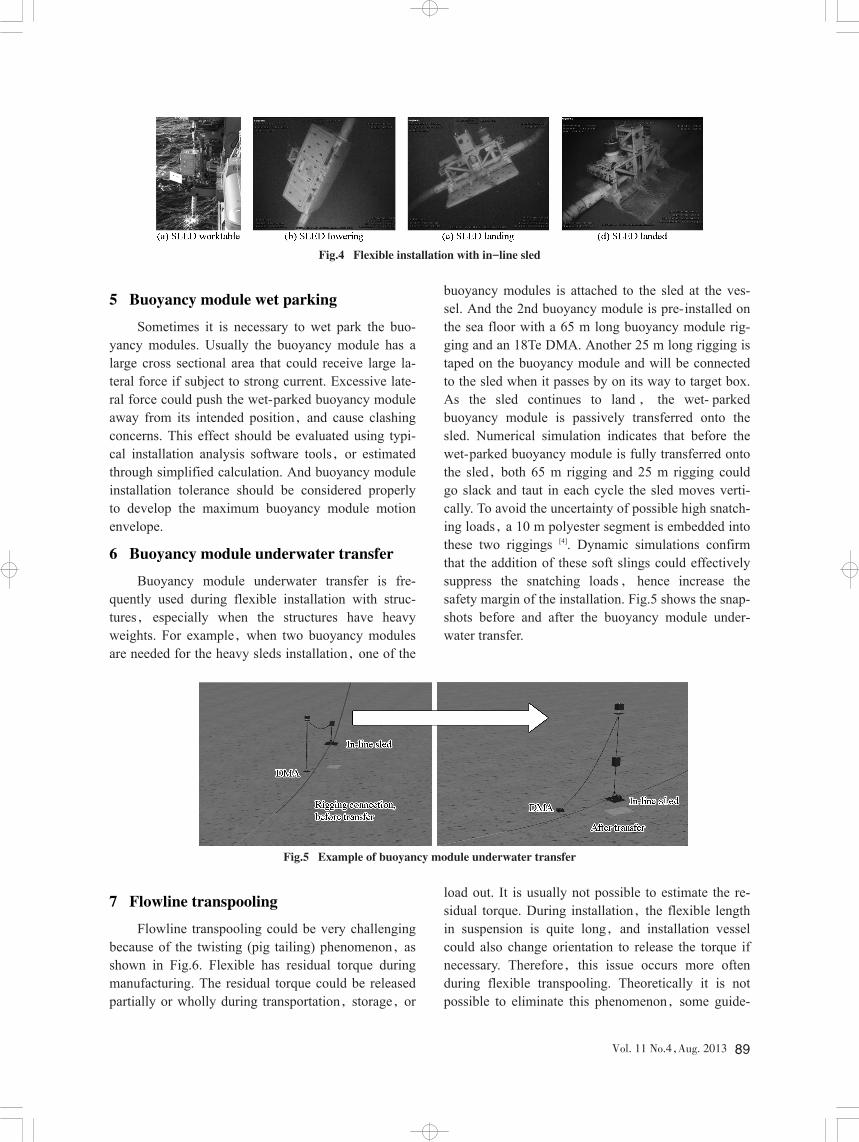
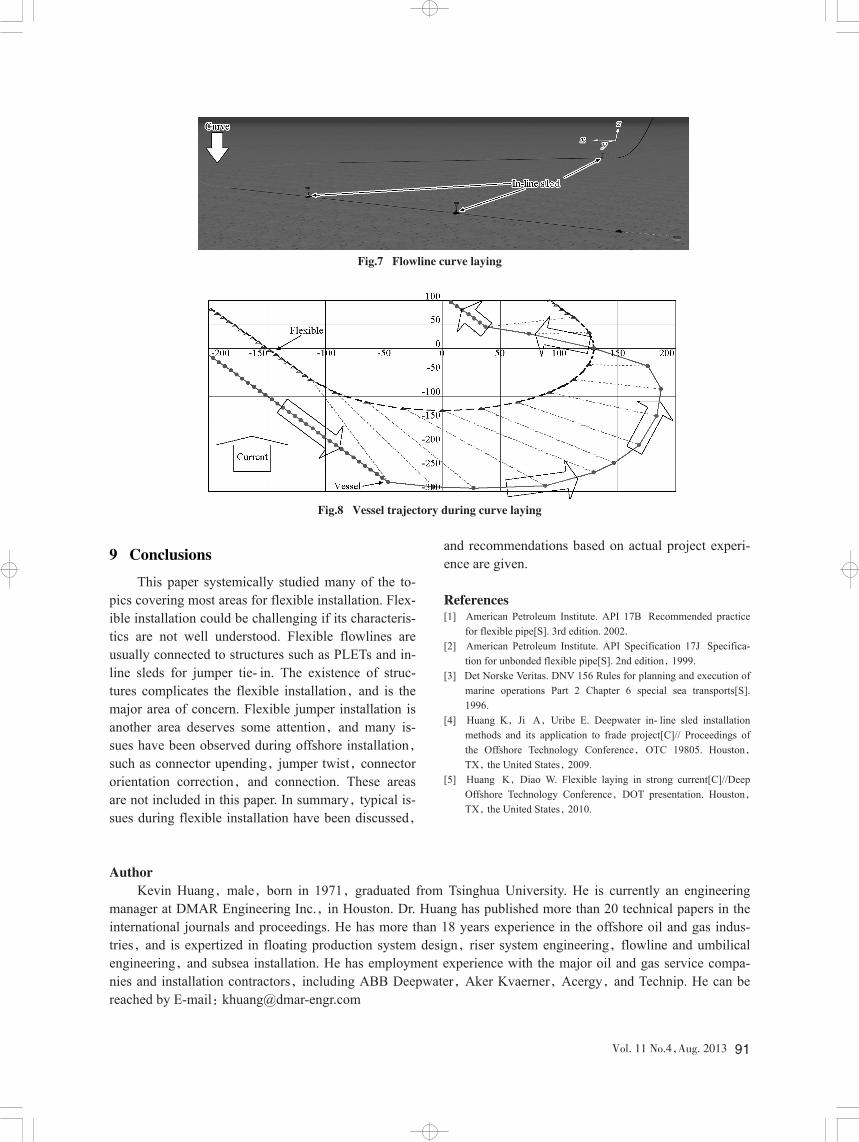
The dynamic installation loads are to be calcu-lated at all installation stages:flange connection,lowering through splashing zone [3],lowering throughwater column,and landing. In general the installationvessel may not be able to function as weather vanewhen the sled is on the work table and being loweredthrough the splashing zone. When the sled is close tothe sea floor,its installation loads are sensitive to itsposition. To capture the maximum loads,the wholeprocess of sled landing should be simulated conti-nuously. Fig.3 illustrates a typical load time historyduring sled landing. It shows that the sled landing pro-cess takes about 5 min before the sled/PLET is com-pletely stabilized on the target box. The flexible instal-lation loads are also related to the flowline condi-tions,whether they are empty or flooded. Fig.4shows the snapshots of the flexible installation within-line sled [4].
Fig.3 Typical installation load time history
88
Vol. 11 No.4,Aug. 2013
Fig.4 Flexible installation with in-line sled
5 Buoyancy module wet parkingSometimes it is necessary to wet park the buo-
yancy modules. Usually the buoyancy module has alarge cross sectional area that could receive large la-teral force if subject to strong current. Excessive late-ral force could push the wet-parked buoyancy moduleaway from its intended position,and cause clashingconcerns. This effect should be evaluated using typi-cal installation analysis software tools,or estimatedthrough simplified calculation. And buoyancy moduleinstallation tolerance should be considered properlyto develop the maximum buoyancy module motionenvelope.
6 Buoyancy module underwater transferBuoyancy module underwater transfer is fre-
quently used during flexible installation with struc-tures, especially when the structures have heavyweights. For example,when two buoyancy modulesare needed for the heavy sleds installation,one of the
buoyancy modules is attached to the sled at the ves-sel. And the 2nd buoyancy module is pre-installed onthe sea floor with a 65 m long buoyancy module rig-ging and an 18Te DMA. Another 25 m long rigging istaped on the buoyancy module and will be connectedto the sled when it passes by on its way to target box.As the sled continues to land , the wet- parkedbuoyancy module is passively transferred onto thesled. Numerical simulation indicates that before thewet-parked buoyancy module is fully transferred ontothe sled,both 65 m rigging and 25 m rigging couldgo slack and taut in each cycle the sled moves verti-cally. To avoid the uncertainty of possible high snatch-ing loads,a 10 m polyester segment is embedded intothese two riggings [4]. Dynamic simulations confirmthat the addition of these soft slings could effectivelysuppress the snatching loads, hence increase thesafety margin of the installation. Fig.5 shows the snap-shots before and after the buoyancy module under-water transfer.
Fig.5 Example of buoyancy module underwater transfer
7 Flowline transpoolingFlowline transpooling could be very challenging
because of the twisting (pig tailing) phenomenon,asshown in Fig.6. Flexible has residual torque duringmanufacturing. The residual torque could be releasedpartially or wholly during transportation,storage,or
load out. It is usually not possible to estimate the re-sidual torque. During installation,the flexible lengthin suspension is quite long,and installation vesselcould also change orientation to release the torque ifnecessary. Therefore,this issue occurs more oftenduring flexible transpooling. Theoretically it is notpossible to eliminate this phenomenon,some guide-
89

ENGINEERING SCIENCES
lines to mitigate the risks associated with the flexiblepig tailing are as follows.
1)Know the flexible allowable twisting limits.These limits should be evaluated and provided by theflexible vendors.
2)Use straight line arrangement for transpoo-ling. If straight line arrangement is not possible,sharp turns need to be avoided.
3) Increase the flexible free suspension length,to allow for easy and early identification of the pigtailing,and higher twist angle tolerance.
4) Monitor the flexible closely during transpoo-ling. Once pig tailing occurs,stop and select appro-priate contingency plans.
5) Transpooling tensioner could prevent the flexi-ble twist from propagating from one side to the otherside,and accumulate the twist at one side. Open thetensioner could balance the torque between the twosides of the tensioner.
6) The transpooling procedures should be rever-sible. This would allow the flexible to be restoredback to where it comes from,and provide a final safeplan in case all other contingency plans fail.
Overall,flexible transpooling needs to be care-fully planned. There has been many incidents resul-ting in damaged flexible pipe interior layer,or da-maged outer sheath in past projects. Yet this phenome-non has not been fully understood as of now.
Fig.6 Flowline twisting during transpooling
8 Flowline curve layingCurve stability depends on the friction force be-
tween the flowline and the seabed soil. Flowlinecurve laying could be difficult, especially layingsmall curves with one or more sleds suspended in thewater column. The reasons are:a. the layback dis-tance is higher than the normal laying condition (with-out sleds),and consequently the flowline static bot-tom tension is also higher;b. the existence of thesleds causes higher dynamic tensions within the flow-line. When subject to strong bottom current,the cur-rent could induce lifting force on the flowline,and re-duce the friction force between the flowline and thesoil. The flowline bottom tension varies with differentsled positions.
To determine the curve stability during flowlineinstallation,several scenarios need to be checked:a. a curve is being laid while one or more sleds arelowered down through the water column,and in thiscase the flowline bottom tension at the touch downpoint is used for curve stability check;b. a curve hasbeen laid not too far away from the sled target box. Inthis case this curve also requires stability check be-cause the flowline bottom tension is much higher dur-
ing sled landing. The tension for curve stability checkwould be the flowline tension at the touch down pointminus the axial friction generated by the flowlinestraight segment between the curve and the touchdown point. For better curve stability it is recom-mended to position the small curves at a certain dis-tance away from the sled target box. Note that thecurve stability during installation also depends on thelaying direction. Losing curve stability during installa-tion results in flowline slippage,which could relocatethe flowline outside of its laying corridor,generateunnecessary overlength,and cause the downstreamsled to miss its target box. Usually the flowline needsto be recovered after slippage occurs. Curve stabili-zing devices,such as sand bags,should be consid-ered for small radius curves that have high possibilityof losing stability. Fig.7 shows an example of the flex-ible curve laying with sleds [4]. Installation vessel ma-neuvering is also critical to ensure the vessel is on thecorrect position that will not over pull the flexible.One example of the vessel trajectory is shown inFig.8,where the vessel is laying a 180 degree curveturn with small radius under strong current comingfrom South [5].
90
Vol. 11 No.4,Aug. 2013
Fig.7 Flowline curve laying
Fig.8 Vessel trajectory during curve laying
9 ConclusionsThis paper systemically studied many of the to-
pics covering most areas for flexible installation. Flex-ible installation could be challenging if its characteris-tics are not well understood. Flexible flowlines areusually connected to structures such as PLETs and in-line sleds for jumper tie- in. The existence of struc-tures complicates the flexible installation,and is themajor area of concern. Flexible jumper installation isanother area deserves some attention,and many is-sues have been observed during offshore installation,such as connector upending,jumper twist,connectororientation correction,and connection. These areasare not included in this paper. In summary,typical is-sues during flexible installation have been discussed,
and recommendations based on actual project experi-ence are given.
References[1] American Petroleum Institute. API 17B Recommended practice
for flexible pipe[S]. 3rd edition. 2002.
[2] American Petroleum Institute. API Specification 17J Specifica-
tion for unbonded flexible pipe[S]. 2nd edition,1999.
[3] Det Norske Veritas. DNV 156 Rules for planning and execution of
marine operations Part 2 Chapter 6 special sea transports[S].
1996.
[4] Huang K,Ji A,Uribe E. Deepwater in- line sled installation
methods and its application to frade project[C]// Proceedings of
the Offshore Technology Conference,OTC 19805. Houston,
TX,the United States,2009.
[5] Huang K,Diao W. Flexible laying in strong current[C]//Deep
Offshore Technology Conference,DOT presentation. Houston,
TX,the United States,2010.
AuthorKevin Huang,male,born in 1971,graduated from Tsinghua University. He is currently an engineering
manager at DMAR Engineering Inc.,in Houston. Dr. Huang has published more than 20 technical papers in theinternational journals and proceedings. He has more than 18 years experience in the offshore oil and gas indus-tries,and is expertized in floating production system design,riser system engineering,flowline and umbilicalengineering,and subsea installation. He has employment experience with the major oil and gas service compa-nies and installation contractors,including ABB Deepwater,Aker Kvaerner,Acergy,and Technip. He can bereached by E-mail:[email protected]
91