sustainable mobility in smart cities: research ... · sustainable mobility in smart cities:...
TRANSCRIPT

Sustainable Mobility in Smart Cities: Research Achievements and Challenges
Dr. George Dimitrakopoulos
Asst. prof., Harokopio University of Athens, Informatics and Telematics
e-mail: [email protected] Tel: +30 210 9549426
Prague, January 20th, 2016

Dr. George Dimitrakopoulos 2
Overview
Introduction – Smart(er) Cities
Smart(er) City Operations
Innovative mobility concepts inside Smarter Cities (Telematics in transportation)
Intelligent Transport Systems: basic concepts
Case studies
1. Dynamic ridesharing (car pooling)
2. Global warning system
3. Reconfigurable driving styles
4. Autonomous parking management
Conclusions and Future Challenges
Indicative research projects and publications

3
Introduction: smart and smarter cities
Smart Cities
Cities that provide smart services to their citizens
Numerous pillars - multidisciplinary interest fields
Enablers: Utilization of Information and Communication Technologies (ICT)
Concept coined by IBM
Smarter Cities
City like natural living organism
Continuous evolution
What is smart today is not smart tomorrow
Immense research
Dr. George Dimitrakopoulos

Smart(er) City Operations (1/3)
Smart(er) City Operations (SCOs)
City operations based on ICT and offer solutions for better quality of life
Indicative areas
Health, mobility, governance, energy, etc.
Example1: Electronic patient record for public hospitals in a city, doctors booking, telemedicine, etc.
Example2: Cooperative mobility, internet-connected vehicles, parking management, car pooling, etc.
Example3: provision of compliant public documents to citizens oIP
Example4: provision of motives for citizens to reform energy sources utilization.
4 Dr. George Dimitrakopoulos

Smart(er) City Operations (2/3)
SCO aspects
1. Level of intelligence (“smartness”) required
At short, medium and long time scale
Consider needs, plans and opinions of all stakeholders involved in its operations, such as (i) citizens, (ii) service providers, (iii) businesses, (iv) municipal authorities and (v)
(inter)national standards. 2. Scalability with respect to the
definition of objectives to be achieved
Smartness should be scalable enough, in that a city should appropriately design the objectives to be achieved at various scales.
5 Dr. George Dimitrakopoulos

Smart(er) City Operations (3/3)
SCO aspects (continued)
3. Formulation of city-specific objectives
A city sets at a local level some standards to be achieved at various time scales.
Then, some Key Performance Indicators (KPIs) are monitored (city-selected criteria / benchmarks).
KPIs should be adaptive enough to respond to new (external) requisitions.
4. Consideration of the economic growth of a smart city
Enable internally operating business groups to obtain income from outside its geographical region, and then enable the obtained revenues to circulate within its region.
Long term SWOT analysis will allow a city to continue attracting immense attention for businesses, whilst being comfortable and secure for its citizens.
6 Dr. George Dimitrakopoulos

Telematics in transportation as SCO
Telematics = Telecommunications and Informatics
Telematics refers to the combined utilization of telecommunications and informatics and involves all kinds of data transfer among systems and devices
Telematics applications
Internet of Things, m-health – emergency incidents management, Avionics, Shipping, Road transport
Example (Fleet management)
Needs to effectively manage fleets of large or smaller companies
Mass transport media (Buses, trains, even taxis)
School buses
Telematics is intrinsically linked to transportation
Fundamental part of operation provided in the context of Smart Cities
Dr. George Dimitrakopoulos 7

8
Intelligent Transport Systems: overview
Overview of transportation inside cities Increased utilization of vehicles
Traffic congestions Pollution Degradation of life quality Emergencies / accidents
Inefficiencies related to transportation
Research in innovative mobility concepts Cooperative mobility and the use of
telecommunications systems inside vehicles Transportation is facilitated by means of newly
introduced, revolutionary telecommunication techniques and gadgets
Improvement of the driver’s safety Improvement of the passengers’ quality of life through
entertainment
Intelligent Transport Systems (ITS) Expected benefits
Improvement of mobility quality in cities Improvement of life quality in cities (less time losses) Reduction of environmental pollution Passengers’ entertainment Targeted marketing solutions
Dr. George Dimitrakopoulos

Intelligent Transport Systems: main technologies
Vehicle-to-Vehicle (V2V) communications
IEEE 802.11p (5.9GHz, 75MHz bandwidth)
It is at an early stage of adoption
It does meet the requirement for minimal infrastructure investment
It suffers from reliability, resilience to interference and stability problems
It faces the ‘fax machine problem’ – it’s only any good if you can communicate with a second party that has similar equipment.
Vehicle-to-Infrastructure (V2I) communications
IEEE 802.11p, Wide Area Networking (WAN) technologies such as 2G/GPRS/EDGE, 3G/UMTS/HSPA/HSPA+ and 4G/LTE
These suffer from location accuracy which could be improved by secondary mechanism such as GPS.
They require high infrastructure costs (e.g. sensors)
Dr. George Dimitrakopoulos 9

Intelligent Transport Systems: example areas
Traffic assessment and management
In-vehicle and on-road safety management Active / passive
Emergency management
Driver modeling
Parking management
Infotainment
Environmental effects of transportation
Application of technologies like sensor networks or network entities’ control techniques
2 directions
A) inform the driver/passenger
B) intervene in CAN-BUS and take over
AUTONOMOUS DRIVING
Dr. George Dimitrakopoulos 10
Retrieve context
information from other
vehicles and the
infrastructure
Intelligently process
information and plan
actions
Issue directives to
driver / propose actions
V2I
V2IV2V
Intelligent Transport Systems: research challenges
Traveler’s information enhancement: Real-time, accurate and tailored information provision to the driver, especially when information originates from multiple sources and is associated with large amounts of data.
Deployment cost reduction: At this time, ITS are associated with high costs that are associated with the distributed infrastructure necessary for their deployment.
Communication availability improvement for ITS: Availability of state-of-the-art communication infrastructure/technologies nation-wide.
Vehicle Co-operation improvement: In-vehicle intelligence, connectivity and co-ordination among heterogeneous technologies.
Driving safety improvement: Solutions that will assist the driver in effectively handling sudden or unforeseen situations (Advanced Driver Assistance Systems – ADAS).
Dr. George Dimitrakopoulos 11

Case study 1: car pooling - Introduction
Intelligent Management Functionality for Improving Transportation Efficiency by means of the Car Pooling Concept
Motivation
The increasing level of utilization of vehicles, linked to the minimization of vehicle passengers, due to the increase in vehicle ownerships.
Creation of traffic volumes and therefore intensifies the difficulties mentioned above.
Solution
Car-independent life styles
The concept of car pooling
The establishment of agreements among a driver and one or more passengers to share a ride inside one vehicle, instead of making the same trip independently.
Results
(i) the reduction of the number of vehicles on the route
(ii) the reduction of expenses for gas
(iii) the reduction of energy consumption (CO2 emissions) and pollution
(iv) the provision of social connections in an increasingly disconnected society
12 Dr. George Dimitrakopoulos
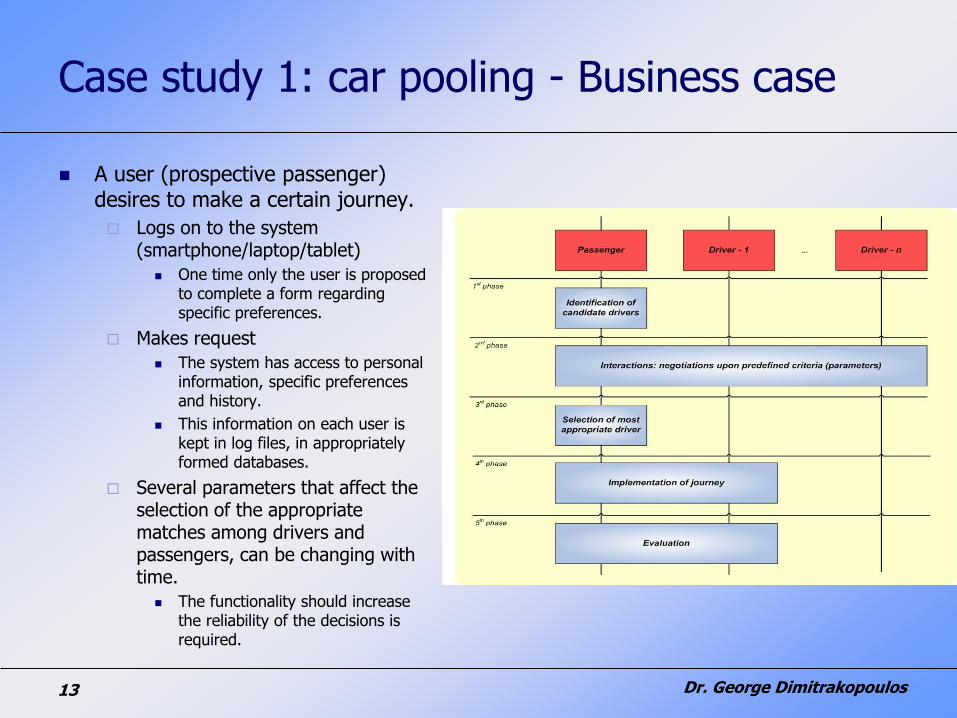
Case study 1: car pooling - Business case
A user (prospective passenger) desires to make a certain journey.
Logs on to the system (smartphone/laptop/tablet)
One time only the user is proposed to complete a form regarding specific preferences.
Makes request
The system has access to personal information, specific preferences and history.
This information on each user is kept in log files, in appropriately formed databases.
Several parameters that affect the selection of the appropriate matches among drivers and passengers, can be changing with time.
The functionality should increase the reliability of the decisions is required.
13 Dr. George Dimitrakopoulos

TM-CPS Detailed Analysis
TM-CPS Detailed Analysis
User Profile Aspects
Service Aspects
Optimization Method
Feedback – Evaluation

User Profile Aspects Age
Gender
Educational Level
Family State
Work
Smoking
Language
Nationality
Source
Destination
Commuter Cost
Evaluation
Driving Skills, Social Behavior, Repeat Match
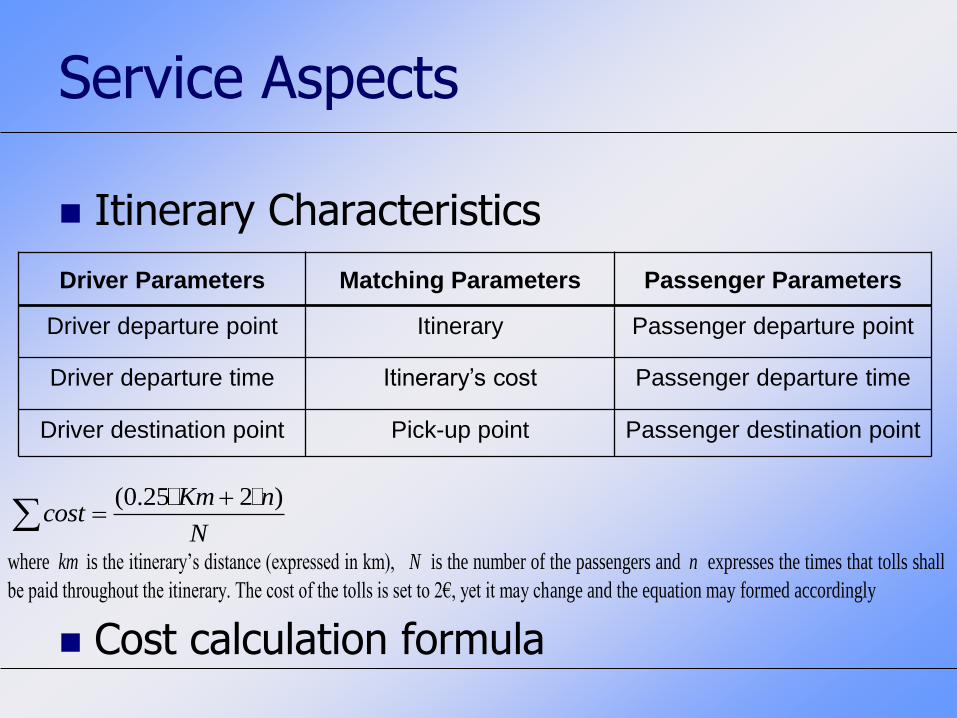
Service Aspects
Itinerary Characteristics
Cost calculation formula
Driver Parameters Matching Parameters Passenger Parameters
Driver departure point Itinerary Passenger departure point
Driver departure time Itinerary’s cost Passenger departure time
Driver destination point Pick-up point Passenger destination point
(0.25 2 )Km ncost
N
where km is the itinerary’s distance (expressed in km), N is the number of the passengers and n expresses the times that tolls shall
be paid throughout the itinerary. The cost of the tolls is set to 2€, yet it may change and the equation may formed accordingly
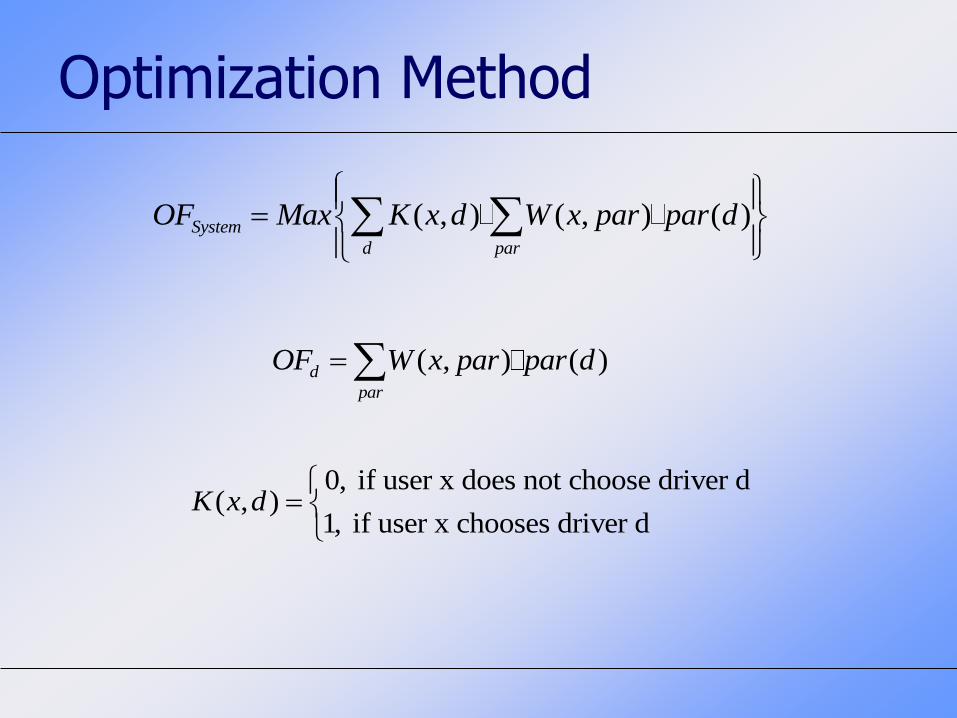
Optimization Method
( , ) ( , ) ( )System
d par
OF Max K x d W x par par d
( , ) ( )d
par
OF W x par par d
0, if user x does not choose driver d( , )
1, if user x chooses driver dK x d
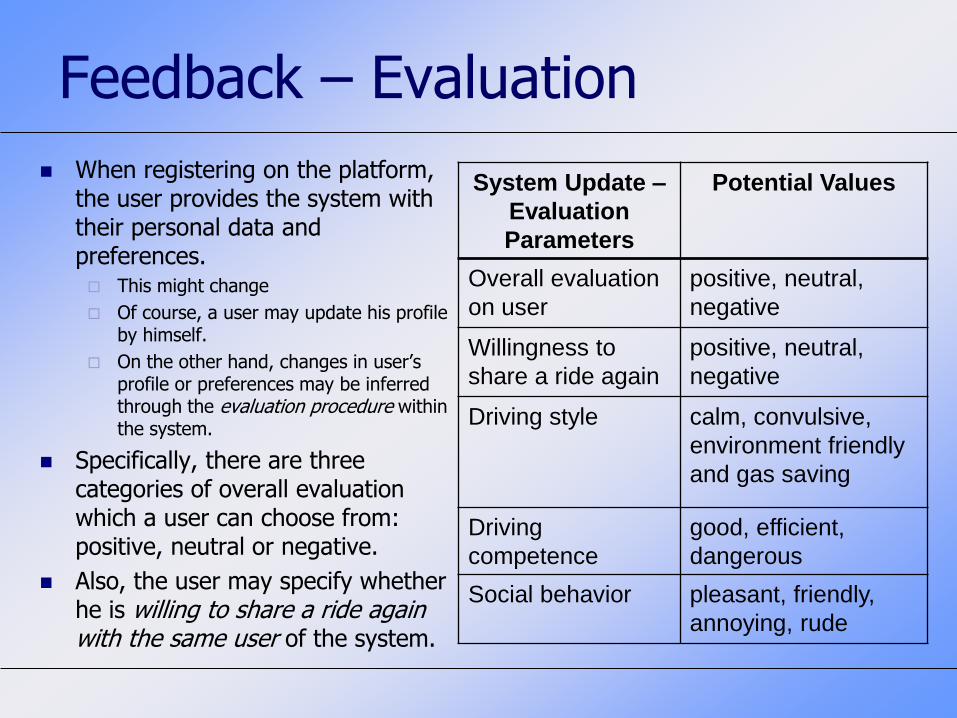
Feedback – Evaluation
When registering on the platform, the user provides the system with their personal data and preferences. This might change
Of course, a user may update his profile by himself.
On the other hand, changes in user’s profile or preferences may be inferred through the evaluation procedure within the system.
Specifically, there are three categories of overall evaluation which a user can choose from: positive, neutral or negative.
Also, the user may specify whether he is willing to share a ride again with the same user of the system.
System Update –
Evaluation
Parameters
Potential Values
Overall evaluation
on user
positive, neutral,
negative
Willingness to
share a ride again
positive, neutral,
negative
Driving style calm, convulsive,
environment friendly
and gas saving
Driving
competence
good, efficient,
dangerous
Social behavior pleasant, friendly,
annoying, rude

Indicative simulation results – scenario 1 (regular service request) (1/4)
We consider user Mary, who has already registered on the TM-CPS and therefore disposes a unique identity in the system.
Her starting point is SP-A and her destination point is DP-A
18 kilometers (km).
3 drivers make a car pooling system request, making the system aware that they are going to follow the itinerary SP-A to DP-A.
Δρ. Δημητρακόπουλος Γεώργιος 19
Parameter Weight
Age 0,09
13 – 17 0,1
18 – 24 0,25
25 – 34 0,4
35 – 44 0,16
45 – 54 0,05
55 – 64 0,02
65 – 70 0,02
Gender 0,02
Male 0,5
Female 0,5
Educational Level 0,07
Higher 0,6
Medium 0,2
Low 0,2
Marital Status 0,05
Married 0,3
Single 0,7
Occupation 0,07
Employed 0,4
Unemployed 0,05
Housewife 0,05
Student/ Pupil 0,5
Smoking 0,25
Yes 0,1
No 0,9
Language 0,02
English 0,3
French 0,3
Greek 0,3
Other 0,1
Nationality 0,05
English 0,8
Other 0,2
Evaluation
Driving Competence 0,25
Good 0,5
Medium 0,35
Low 0,15
Social Behavior 0,08
Good 0,8
Medium 0,1
Low 0,1
Itinerary Cost 0,05
Economic 0.6
Non-economic 0.4
Repeat Match
(NMB) No Match Before
Yes
No

Indicative simulation results – scenario 1 (regular service request) (2/4)
Parameters George Kate Nicolas
Age 29 yrs (0,4) 26 yrs (0,4) 34 yrs (0,4)
Gender Male (0,5) Female (0,5) Male (0,5)
Educational Level Medium (0,2) Higher (0,6) Higher (0,6)
Marital Status Married (0,3) Single (0,7) Single (0,7)
Occupation Employed (0,4) Student (0,5) Employed (0,5)
Smoker No (0,9) Yes (0,1) Yes (0,1)
Language English (0,3) English (0,3) English (0,3)
Nationality English (0,8) English (0,8) English (0,8)
Departure SP-A SP-A SP-A
Destination DP-A DP-A DP-A
Itinerary Cost Non - Economic (0,4) Economic (0,6) Non-Economic (0,4)
Evaluation
1. Driving Competence Good (0,5) Good (0,5) Medium (0,35)
2. Social Behavior Good (0,8) Medium (0,1) Good (0,8)
3. Repeat Match NMB NMB Yes
3 candidate drivers

Indicative simulation results – scenario 1 (regular service request) (3/4)
Weights of Parameters
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
AG GEN EL FS WOR SM LAN NT CC DS SB
Parameters
Weig
hts George
Kate
Nicolas
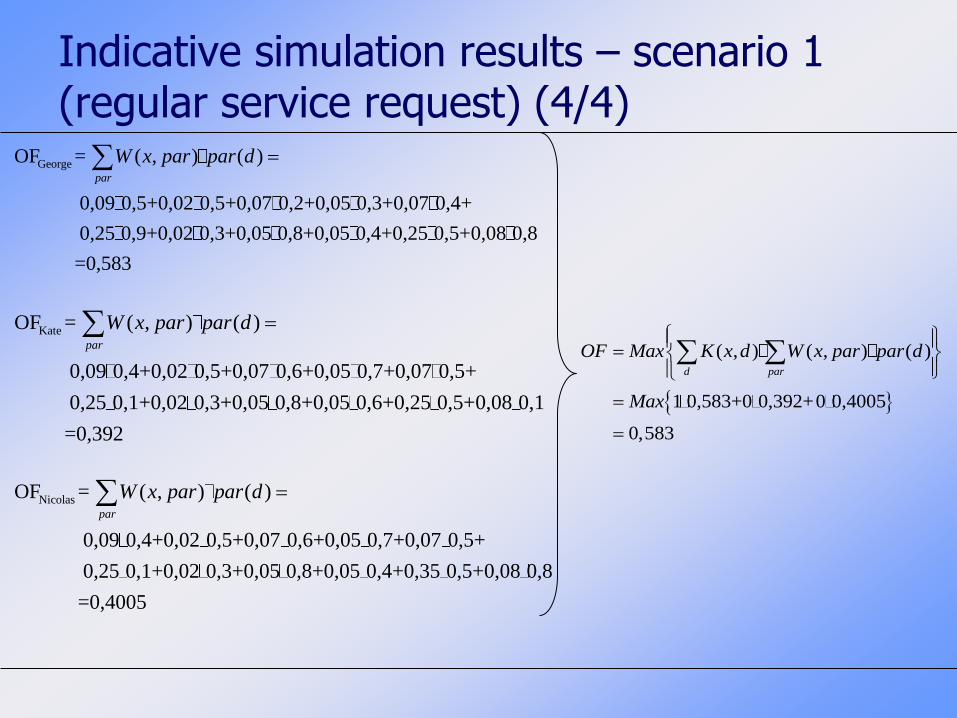
Indicative simulation results – scenario 1 (regular service request) (4/4)
GeorgeOF = ( , ) ( )
0,09 0,5+0,02 0,5+0,07 0,2+0,05 0,3+0,07 0,4+
0,25 0,9+0,02 0,3+0,05 0,8+0,05 0,4+0,25 0,5+0,08 0,8
=0,583
par
W x par par d
KateOF = ( , ) ( )
0,09 0,4+0,02 0,5+0,07 0,6+0,05 0,7+0,07 0,5+
0,25 0,1+0,02 0,3+0,05 0,8+0,05 0,6+0,25 0,5+0,08 0,1
=0,392
par
W x par par d
NicolasOF = ( , ) ( )
0,09 0,4+0,02 0,5+0,07 0,6+0,05 0,7+0,07 0,5+
0,25 0,1+0,02 0,3+0,05 0,8+0,05 0,4+0,35 0,5+0,08 0,8
=0,4005
par
W x par par d
( , ) ( , ) ( )
1 0,583+0 0,392+0 0,4005
0,583
d par
OF Max K x d W x par par d
Max

Indicative simulation results – scenario 2 (cost – driven scenario) (1/4)
In this case, user Thomas (a driver now) wishes to drive an itinerary of 463km, having as starting point the SP-K and destination point the DP-L. This means that the itinerary is an interurban itinerary and it definitely involves tolls. Driver Thomas specifies the day and time of departure, the possible stops he is going to make during the itinerary and the number of tolls he is going to pay:
Starting Point: SP-K
Destination Point: DP-L
Kilometers: 463 Km
Number of tolls: 5
Δρ. Δημητρακόπουλος Γεώργιος 23
Parameter Weight
Age 0,1
13 – 17 0,15
18 – 24 0,3
25 – 34 0,3
35 – 44 0,1
45 – 54 0,05
55 – 64 0,05
65 – 70 0,05
Gender 0,02
Male 0,5
Female 0,5
Educational Level 0,09
Higher 0,5
Medium 0,35
Low 0,15
Marital Status 0,04
Married 0,45
Single 0,55
Occupation 0,08
Employed 0,2
Unemployed 0,25
Housewife 0,05
Student/ Pupil 0,5
Smoking 0,15
Yes 0,6
No 0,4
Language 0,02
English 0,3
French 0,3
Greek 0,3
Other 0,1
Nationality 0,05
English 0,65
Other 0,35
Evaluation
Driving Competence 0,0
Good 0,0
Medium 0,0
Low 0,0
Social Behavior 0,1
Good 0,8
Medium 0,1
Low 0,1
Itinerary Cost 0,35
Economic 0,1
Non-economic 0,9
Repeat Match
(NMB) No Match Before
Yes
No
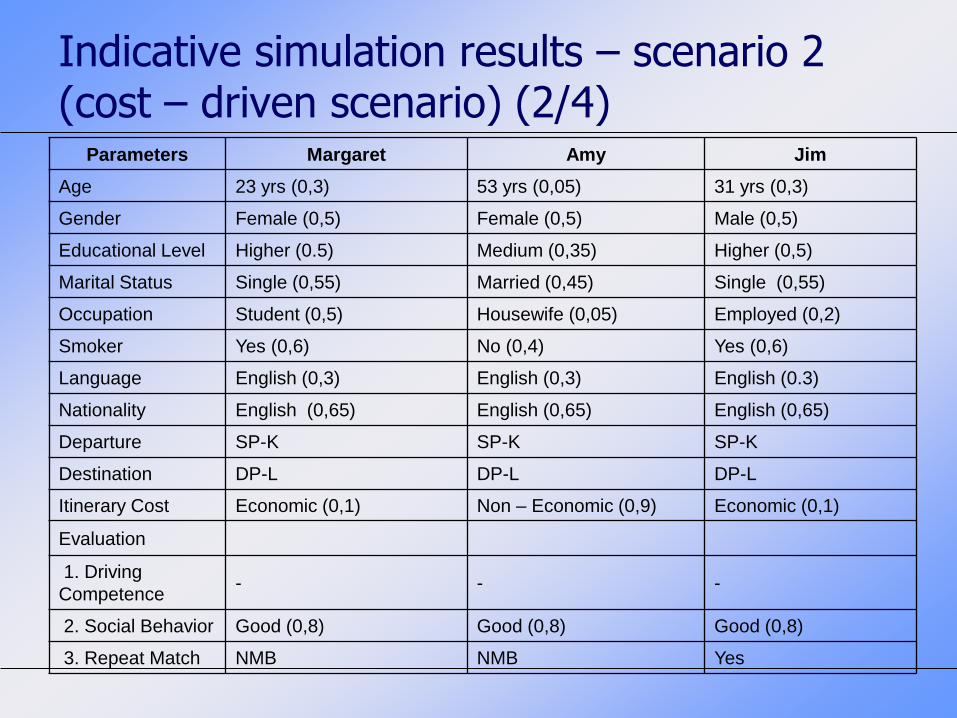
Indicative simulation results – scenario 2 (cost – driven scenario) (2/4)
Parameters Margaret Amy Jim
Age 23 yrs (0,3) 53 yrs (0,05) 31 yrs (0,3)
Gender Female (0,5) Female (0,5) Male (0,5)
Educational Level Higher (0.5) Medium (0,35) Higher (0,5)
Marital Status Single (0,55) Married (0,45) Single (0,55)
Occupation Student (0,5) Housewife (0,05) Employed (0,2)
Smoker Yes (0,6) No (0,4) Yes (0,6)
Language English (0,3) English (0,3) English (0.3)
Nationality English (0,65) English (0,65) English (0,65)
Departure SP-K SP-K SP-K
Destination DP-L DP-L DP-L
Itinerary Cost Economic (0,1) Non – Economic (0,9) Economic (0,1)
Evaluation
1. Driving
Competence - - -
2. Social Behavior Good (0,8) Good (0,8) Good (0,8)
3. Repeat Match NMB NMB Yes
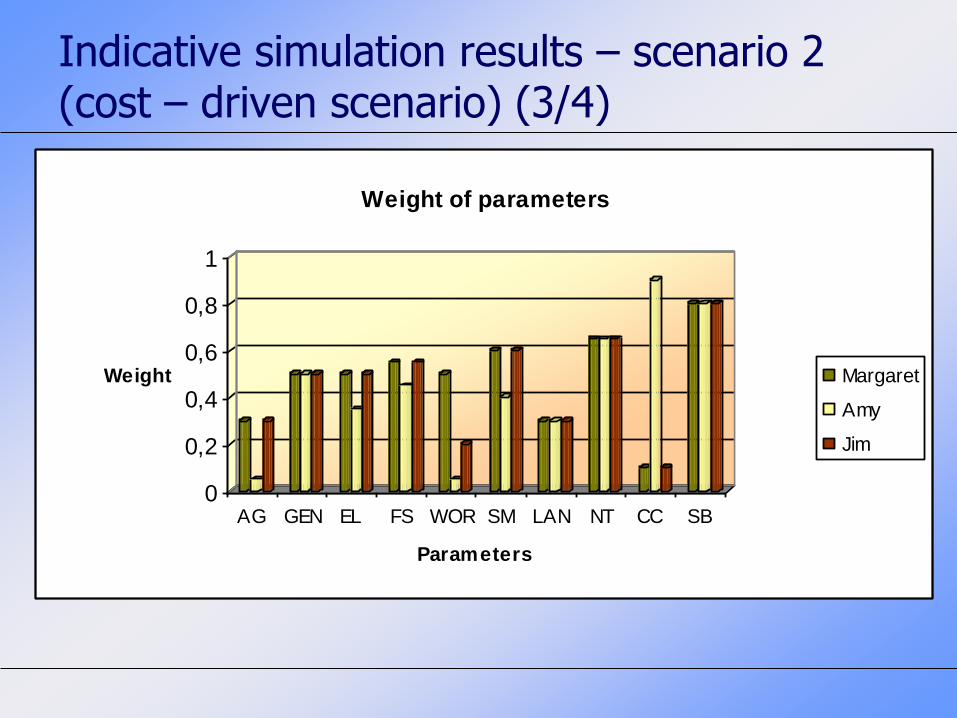
Indicative simulation results – scenario 2 (cost – driven scenario) (3/4)
0
0,2
0,4
0,6
0,8
1
Weight
AG GEN EL FS WOR SM LAN NT CC SB
Parameters
Weight of parameters
Margaret
Amy
Jim

Indicative simulation results – scenario 2 (cost – driven scenario) (4/4)
Objective Function
0,3905
0,562
0,3665
0
0,1
0,2
0,3
0,4
0,5
0,6
Margaret Amy Jim
Candidate Passengers
OF
valu
e
Case study 1: car pooling - potential extensions
Extensions
Further machine learning techniques that could create collective knowledge that would be exploited by the systems more efficiently in reaching the appropriate decisions.
Possibility to change the importance (weights) attributed to the personal and service profile parameters during the robust discovery phase and test the functionality’s response. Integration of the concept of car pooling in larger management functionality for intelligent transportation systems based on knowledge and experience.
27 Dr. George Dimitrakopoulos

28
Case study 2: ADAS: global warning system
Vehicle sensors and vehicular ad hoc networks Inputs: vehicle condition, velocity, direction, data of vehicles nearby, infrastructure elements
(traffic lights, signs, etc), congestion, driver profiles
Outputs: notification of driver on forthcoming dangers (alert levels)
Benefits: increase in driving efficiency, increase in safety, reliability and stability, cost reduction
Algorithmic manner: optimization of objective function (heuristic)
V2I
Alerts issuing
Contextual
acquisition
Profiles, goals
and policies
derivation
Sensors
Sensors
ESCA
ESCA global
safety algorithm
Input
Output
Algorithmic
process
Kn
ow
led
ge
an
d
ex
pe
rie
nc
e c
rea
tio
n
Repository
(database)
Sensors
Ad-hoc vehicular
sensor networks
(AVSNs)
Dr. George Dimitrakopoulos

Case study 3: Reconfigurable driving styles (1/3)
Driving style
Combination of parameters
Vehicle reactions, controls, gear changes, suspension
Adaptation of driving style
Α) Manually
Β) Dynamically
Parameter-based (road condition, vehicle condition, driver condition / fatigue / profile, etc.)
System that increases the reliability of decisions taken (Bayesian networks)
Benefit: increase in in-vehicle intelligence
29 Dr. George Dimitrakopoulos

Case study 3: Reconfigurable driving styles (2/3)
1. A set of drivers that may drive a certain vehicle is assumed (one of them is also enough for the case), as well as a set of driving styles.
The drivers and the driving styles are associated with specific parameters
i.e. (a) context information deriving from measurements obtained from the vehicle’s sensors
data on the driver’s personal profile parameters
data associated with style related parameters
A set of overarching policies reflects driver/styles preferences, in the form of weights (importance) attributed to the aforementioned parameters.
2. The manner in which a driver operates the vehicle can change from time to time.
Change of the personal profile parameters.
Thus, a change in the driving style of the vehicle may be desirable (change of suspension adjustments, gear ratios, speed of vehicle reaction, etc.).
3. Goal of functionality
Interact, on behalf of the driver, with all candidate driving styles and find and propose an optimum match
30 Dr. George Dimitrakopoulos

Case study 3: Reconfigurable driving styles (3/3)
31
Context information
1. Mean driving speed
2. Frequency of turns
3. Mean level of
revolutions / minute
4. Frequency of gear
changes
Personal profile
parameters
1. Age / experience
2. Gender
3. Mental state/fatigue
(a) (b)
Driving style
parameters
1. Vehicle reaction
2. Control
3. Economy
4. Comfort
Robust Discovery
phase(probabilities that parameters
will achieve reference values,
based on candidate matches)
CPTsContext
information
(data on current
vehicle driving
parameters from
sensor
measurements)
Profile Parameters
(information on
driver’s personal
profile preferences)
Policies
(importance of
parameters)
Decision Making
phase(selection of the most
appropriate matching, based
on the maximum probabilities
identified)
Ne
w C
PT
va
lue
s
Algorithmic process
Selection of
driving
styles
Input Output
Feedback - Evaluation
Adjustment of
suspension, gear
ratios, speed limits,
etc.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
OF
Valu
e
Number of Computations
DS=1
DS=2
DS=3
Dr. George Dimitrakopoulos

Case study 4: autonomous parking management
Data aggregation
(i) the municipality data base with information about the number and location of all available parking spots within an area
(ii) built – in as well as additional infrastructure to gather real – time information (cameras, ultrasound sensors)
(iii) TMC data flow regarding current traffic.
Data analytics
Evaluate all information gathered and extract accurate, real time results regarding the available parking spots within a specific geographical area.
User – friendly, fast and accurate communication between the driver and the i-park server through a smartphone application
Dr. George Dimitrakopoulos 32
Municipality data
base
Built-in and
additional
infrastructure
(cameras, ultrasound
sensors
Data flow from TMC
i – park serverData aggregation &
analysis algorithms
Response for available
parking spots
Request for parking spot in the area
Directives issuing:
- parking white spaces
- optimized route
- additional useful
driving commands
Context
acquisition
Profiles, goals
and policies
derivation
i-park-wireless parking
management system
Parking
management
algorithmic
processes
Input
Output
Decision
Making
Kn
ow
led
ge
an
d
exp
erie
nc
e c
rea
tio
n
Repository
(database)
Data
sources
End user /
application

Conclusions and future challenges
Conclusions
Smart Cities are getting more and more smart
This requires capital expenditure
Novel solutions are sought for in various areas
Transportation is an area where SCO find prosper ground
ITS can increase the quality of mobility in large cities
Challenges: further exploitation of ITS principles in Smart City Operations
100% real-time assessment of traffic congestions
A priori identification of forthcoming dangers
Directives for multimodal transport inside a city / region
Directives for identification of white parking spaces / autonomous parking
Inform drivers on city-specific events (cultural, etc.)
Inform drivers on city-specific incidents (e.g. protests, works, etc.)
Targeted/focused ads and infotainment
Confront privacy issues
Decrease of infrastructure costs
Potential utilization of future mobile communication infrastructures (LTE, 5G D2D)
33 Dr. George Dimitrakopoulos

Indicative R&D projects and publications
R&D projects
i-DOHA (Design Requirements: Capability-Driven Requirements Engineering with Application on i-Doha for the 2022 World Cup), funded by Qatar National Research Fund (QNRF) under the 7th National Priorities Research Programme (Collaborative Project). 01/03/2015 –28/02/2018.
EMC2, Embedded Multi-Core Systems for Mixed Criticality Applications in Dynamic and Changeable Real-Time Environments, EU FP7 JTI-CP-ARTEMIS (Joint Technology Initiatives - Collaborative Project). 01/04/2014 – 31/03/2017
Publications
G. Dimitrakopoulos, T. Zographos and G. Bravos, “A Holistic Framework for Embedded Safe and Connected Automation in Vehicles”, in Proc. 13th IEEE International Conference on Industrial Informatics (INDIN) 2015, Cambridge, UK, July 2015.
G. Dimitrakopoulos, G. Bravos, M. Nikolaidou and D. Anagnostopoulos, “A Proactive, Knowledge-Based Intelligent Transportation System based on Vehicular Sensor Networks”, IET Intelligent Transport Systems journal, vol. 7, Issue:4, pp 454 - 463, December 2013.
G. Dimitrakopoulos, P. Demestichas, V. Koutra, "Intelligent Management Functionality for Improving Transportation Efficiency by means of the Car Pooling Concept", IEEE Transactions on Intelligent Transportation Systems, vol 13, issue 2, June 2012, pp. 424-436.
G. Dimitrakopoulos and J. Ghattas, “Autonomic Decision Making for Vehicles based on Visible Light Communications”, in Proc. IEEE 14th Wireless Telecommunications Symposium (WTS) 2015, New York, USA, April 2015.
G. Dimitrakopoulos, “Knowledge-based Reconfiguration of Driving Styles for IITS”, International Journal of Artificial Intelligence and Neural Networks”, vol. 4, issue 4, December 2014.
G. Dimitrakopoulos, P. Demestichas, “Intelligent Transportation Systems based on Cognitive Networking Principles”, IEEE Vehicular Technology Magazine (VTM), March 2010.
34 Dr. George Dimitrakopoulos

Thank you!
Dr. George Dimitrakopoulos Harokopio University of Athens,
Informatics and Telematics department
9 Omirou str., 17778, Athens, GREECE
Tel: +30 210 9549 426, Fax: +30 210 9549 281
Cel: +30 697 2005781
e-mail: [email protected]
Web: www.dit.hua.gr
Dr. George Dimitrakopoulos 35