table of contentsecesd.engr.uconn.edu/.../12/ece193me32_interimreport.docx · web viewdan messner...
TRANSCRIPT

ECE193/ME32 November 25, 2013
Sikorsky Wireless Test Instrumentation for Rotating
PartsECE 193:
Olivia BonnerDavid Vold
Brendon RuschMichael Grogan
ME 32:Andrew Potrepka
Kyle Lindell
UCONN Faculty Advisors:Rajeev Bansal
Robert Gao
Sikorksy Contacts:Paul InguantiChris WinslowDan Messner
University of Connecticut Storrs, CT 06269Website: http://ecesd.engr.uconn.edu/ecesd193/ E-Mail: [email protected]

Sikorsky Wireless Test Instrumentation 2
Table of Contents1 Abstract………………………………………………………………………………………………………………...32 Introduction………………………………………………………………………………..………..………………33 Problem Statement.………………………………………………………………………………………………4
3.1 Statement of Need………………………………………………………………………………….43.2 Preliminary Requirements……………………………………………………………………….53.3 Basic Limitations……………………………………………………………………………………..63.4 Other Data………………………………………………………………………………………………6
4 Proposed Solution Overview………………………………………………………………..……………….75 Power Circuitry……………………………………………………………………………………………………..8
5.1 Voltage Regulator…………………………………………………………………………………..95.2 Charging Circuit…………………………………………………………………………………….10
6 Electronics…………………..………………….......…………………………………………………………….136.1 Microcontroller………………………………………………………………………………….…136.2 Sensors………………………………………………………………………………………………….146.3 Wireless Transceiver..…………………………………………………………………………...16
7 Data Analysis……………………………………………………………………………………………………….167.1 Data Transmission…………………………………………………………………………………17
8 Battery…………………………………………………………………………………………………………………179 Energy Harvesting……………………………………………………………………………………………..…1910 Test Rig……………………....…………………………………………………….……………………….……..2311 Budget……………………………………………………………………………………………………………….24
11.1 Estimated Costs…………………………………………………………………………………..2512 Timeline…………………………………………………………………………………………………………….2613 References…………………………………………………………………………………………………………27

Sikorsky Wireless Test Instrumentation 3
1 AbstractSikorsky has requested of this team a wireless sensor system for use within rotating parts to replace wired slip rings. The system must be able to transmit a clean signal from at least two sensors a distance of at least 40 feet in a range of environmental operating conditions. The system must also be able to function for a minimum of 12 hours per day for a full year and continue functioning after a 30 day period of inactivity. The team has proposed a solution utilizing an Arduino Nano v3.0, a WiFly module attachment and several sensors. The unit will be powered by a 2-cell lithium polymer battery coupled with an energy harvesting unit that will recharge the battery while the unit is rotating. All parts have been ordered save for a rectifier and power switching circuit. The unit will be tested using the same test rig as last year’s team.
2 Introduction
Sikorsky helicopters rely on numerous rotating systems. These systems are crucial to the operation of the aircraft and must be monitored in order to detect system faults. Sikorsky currently utilizes a monitoring system that consists of wired sensors and slip rings. These slip rings, however, are extensively utilized at high rotational speeds and often fail due to erosion. Additionally, the wires from the sensors and slip rings add unnecessary weight to the aircraft. Consequently, Sikorsky has proposed the concept of a wireless electronic monitoring system; this system would more quickly and more efficiently monitor parameters such as temperature, noise, stress, strain and vibrations. United Technologies, Sikorsky Aircraft, has asked UCONN team EE193/ME32 to come up with a wireless solution to monitor the pitch change bearings of their S92 Helicopter. The team was

Sikorsky Wireless Test Instrumentation 4
allocated a budget of $2,000 to update and redesign the system created by the previous senior design team (2012-2013)[1].
The 2012-2013 UCONN student team created a wireless system in which one sensor was used. The system was powered by a battery that could handle 12 hours of operation per day and a lifetime of at least a year. In order to successfully demonstrate their system the team created a test rig to represent the tail rotor of the S-92 helicopter. The test rig included an accurate representation of the electronics cavity. An accelerometer was used to measure the acceleration near the tail rotor bearings. The 2012-2013 UCONN student team successfully created a test rig for the tail rotor of an S-92 helicopter and a wireless sensor system that utilized one sensor and was powered by a battery.
Sikorsky has asked the current team to further the project with the addition of at least one other sensor and the utilization of energy harvesting. The team will be using a new Arduino nano microcontroller due to lack of documentation of the previous PCB and microcontroller. The team will test the following sensors as viable options for the second sensor: microphone, infrared temperature and thermometer. Wi-Fi will be used instead of Zig-Bee to transmit the signals. In order to power the system the team will use a small electric generator coupled with a battery. The generator will use gravitational torque to keep the shaft stationary via an off-center weight.

Sikorsky Wireless Test Instrumentation 5
Figure 1. An interior sketch of the tail rotor gearbox on the S92 helicopter
3 Problem Statement3.1 Statement of NeedSikorsky helicopters rely on numerous rotating systems. These systems are crucial to the operation of the aircraft and must be monitored in order to detect system faults. Technicians and mechanics have been responsible for monitoring these rotating parts via manufacturer specifications; such maintenance testing occurs after a designated number of flight hours. This type of system monitoring, however, has proven to be very inefficient. These rotating parts are deeply embedded in the aircraft and, consequently, are very difficult to get to when maintenance is required. Additionally, the time and labor essential for this type of guess-and-check maintenance has proven to be costly.Sikorsky currently utilizes a monitoring system that consists of wired sensors and slip rings. These slip rings, however, are extensively utilized at high rotational speeds and often fail due to erosion. Additionally, the wires from the sensors and slip rings add unnecessary weight to the aircraft.Consequently, Sikorsky has proposed the concept of a wireless electronic monitoring system; this system would more quickly and more efficiently monitor parameters such as temperature, noise, stress, strain and vibrations. This advancement would,

Sikorsky Wireless Test Instrumentation 6
thereby, allow system faults to be detected at an earlier stage, and essentially create a safer environment onboard the aircraft. Wireless electronic monitoring also presents an overall weight reduction by eliminating unnecessary leads and wires that run from sensors to on-board computers. Assembling the monitoring system in a more readily accessible area can also reduce labor and repair costs. Additionally, if the monitoring system can be self-contained with an independent power source, it can be easily replaced.
3.2 Preliminary RequirementsSikorsky has asked the 2013-2014 UCONN team to expand upon last year’s project proposal. The company requested the UCONN team to design a self-contained, wireless monitoring system with an independent power source, all within an enclosure of a specified size. Sikorsky requires the system to have at least two sensors (i.e. a thermocouple, strain gage, microphone, etc.) with each sensor measuring a different parameter. The primary objective is to transmit and receive a clear signal over a minimum distance of 20 feet. In order to assure the quality of the generated signals, they will be compared to a calibrated signal during prototype testing. The company proposed a second objective of increasing the battery life possibly via energy harvesting within the enclosure. The final objective presented to the UCONN team was to propose a sensor design in which the signals are able to pass through barriers, such as doors, without interference. Sikorsky is currently planning a date for the spring semester for the UCONN team to test /demonstrate this design at company facilities.
3.3 Basic Limitations Electronics Compartment:
• Size: 1.5” diameter x 5.1” long• Temperature: -20 to 250 degrees F
Rotating Speed of Tail Rotor Shaft• 1200 RPM
Battery Life• 1-year min (3 years recommended)• Run for 12 hours a day• Must survive 30 days of inactivity
Data Processing

Sikorsky Wireless Test Instrumentation 7
• Measure vibration• Store data temporarily• Transmit to stationary system and available at request of user• Data must travel wirelessly upwards of 40 feet
Environmental Parameters• Oil lubricated cavity• Moisture • High vibration level• Must not be visible on the exterior (hostile elements present)
3.4 Other Data The UCONN team will be expanding upon last year’s system model, incorporating the updated requirements proposed by Sikorsky. The company has given the team a budget of $2,000 to further advance the 2012-2013 wireless, self-powered transmitter package.Sikorsky is interested in this project on a conceptual basis; therefore, the team’s design will behave as research to see if a wireless monitoring system is feasible and acceptable for their helicopters.

Sikorsky Wireless Test Instrumentation 8
4 Proposed Solution Overview
Figure 2. General system block diagram
Figure 2 illustrates the general system block diagram that the team will be utilizing. The two sensors, the accelerometer and the thermometer, are illustrated to the far left and will be communicating with the Arduino via a Serial Peripheral Interface Bus (SPI Bus) and an interrupt. The interrupt signal temporarily stops the program from collecting data, as it is only necessary to collect this information upon user command. When the device is not collecting data, it shall remain in standby mode in order to save battery life. The Arduino will be in communication with the Static Random Access Memory (SRAM) via data lines and an address. Additionally, the Arduino will be in communication with the wireless transceiver via another SPI Bus and a sleep/wake, input/output signal. The transceiver will communicate with the antenna receiver. Lastly, the Arduino will be powered via an applicable battery and an energy-harvesting source (to save/maintain battery life).

Sikorsky Wireless Test Instrumentation 9
Figure 3. Circuit schematic utilized from the previous team (2012-2013)[1]
The team has the above circuitry from the previous team; we plan to further analyze the system they created in order make necessary improvements.
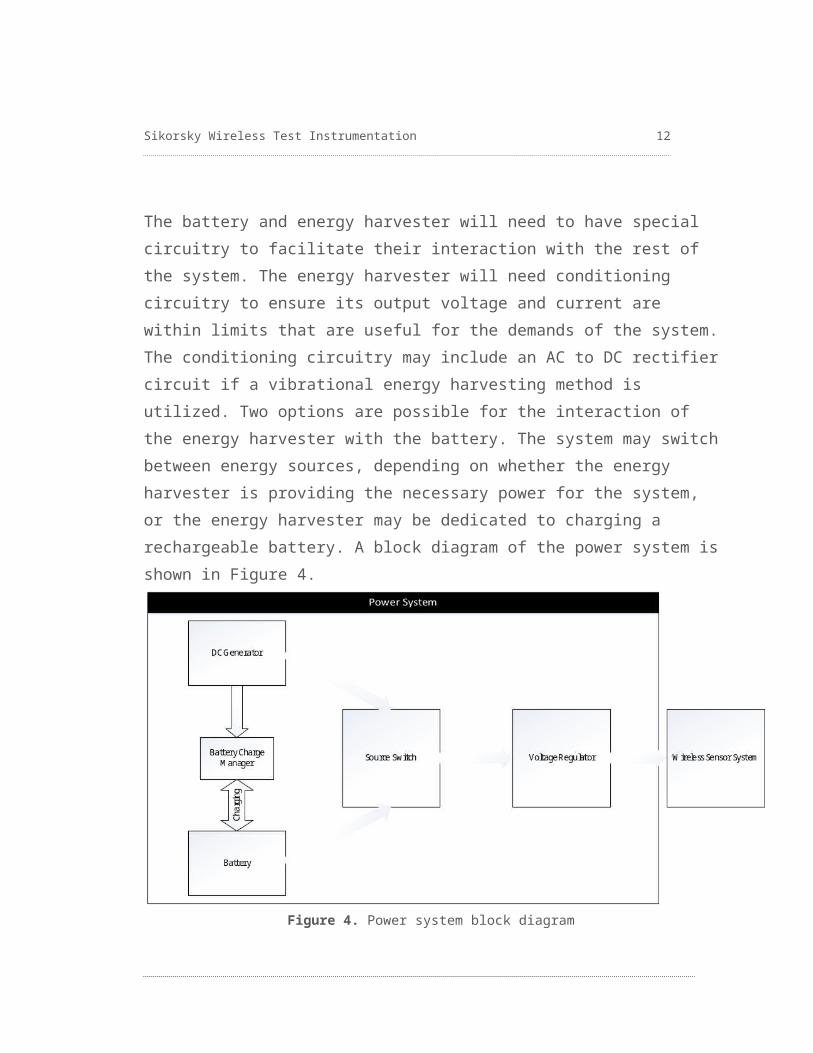
5 Power CircuitryThe battery and energy harvester will need to have special circuitry to facilitate their interaction with the rest of the system. The energy harvester will need conditioning circuitry to ensure its output voltage and current are within limits that are useful for the demands of the system. The conditioning circuitry may include an AC to DC rectifier circuit if a vibrational energy harvesting method is utilized. Two options are possible for the interaction of the energy harvester with the battery. The system may switch between energy sources, depending on whether the energy harvester is providing the necessary power for the system, or the energy harvester may be dedicated to charging a rechargeable battery. A block diagram of the power system is shown in Figure 4.

Sikorsky Wireless Test Instrumentation 10
Figure 4. Power system block diagram
5.1Voltage RegulatorA voltage regulator is required to keep the voltage supplied to the wireless sensor package constant. Two options were considered for voltage regulation; linear regulators and switching regulators.
Regulator type Part number EfficiencyNoise Table 5.1
Linear Regulator L7805 Approximately 67% No noiseSwitching Regulator PTH08080W 93.5% [2] Noise induced by
switching frequency.
The efficiency for the linear regulator can be approximated by the ratio of output voltage to input voltage: VO/VI x 100% [3]. Using a 7.4 V battery the efficiency would be 5/7.4 x 100% = 67%. Due to low efficiency, linear regulators dissipate power as heat and sometimes require heat sinks which take up extra space. A drawback of the switching regulator is that the switching frequency can add undesirable noise to the system [4]. The switching regulator option was chosen due to its superior efficiency

Sikorsky Wireless Test Instrumentation 11
which allows for a smaller implementation. A diagram of the implementation of the PTH08080W from [2] is shown in Figure 5.
Figure 5. PTH08080W Switching Voltage Regulator, RSET=348 Ω for 5V output [2].
5.2 Charging Circuit
We have analyzed several methods to charge two lithium polymer cells. The first method we looked into was to completely create our own circuit. The first circuit we discovered through research is seen below.
Sikorsky Wireless Test Instrumentation 12
Figure 6. Lithium-Ion Battery ChargerThe circuit could provide an output voltage that we desire. The circuit is also fairly simple and is focused around the use of a transistor. However, the problem with creating our own charging circuit is the size and PCB. We would need to have a PCB made for the circuit. Also, due to the transistor a heat sink might be needed. This would also take up space in the small compartment.
The second method the team investigated was the use of power management IC chips. Linear Technology offers a few chips specifically made for energy harvesting. The chip that caught the team’s attention was the LTC4071. This chip specializes in low current applications. The applications listed on the datasheet for it are:

Sikorsky Wireless Test Instrumentation 13
Low Capacity, Li-Ion/Polymer Battery Back-Up Thin Film Batteries Energy Scavenging/Harvesting Solar Power Systems with Back-Up Memory Back-Up Embedded Automotive
The first problem with this chip is that it can only output 3.7 V to 4.2 V. Also, we would need to create a PCB with the chip or order a premade evaluation board from Linear Technology. The evaluation board from Linear Technology was far too large for our dimensions. A second chip the team studied was a Texas Instrument DVT2057. TI states this chip can combine high-accuracy current and voltage regulation, battery conditioning, temperature monitoring, charge termination, charge-status indication, and AutoComp charge-rate compensation in a single 8-pin IC.This chip is made specifically for two cell lithium polymer. We ran into the same problem with size constraints. The evaluation board offered by TI is also too large.
The final method the team has chosen to implement is to use PRT-1123 lithium polymer chargers. These chargers feature:
MCP73831 Single Cell LiPo charger at 500mA TPS61200 Boost Converter Selectable output voltage 3.3 or 5V 5V @ 600mA max 3.3V @ 200mA max Undervoltage lock out at 2.6V (with disable jumper) Quiescent current, less than 55uA JST connector for LiPo battery micro-USB connector for charge power source Inductor: 4.7uH, 1.2A Sumida CDRH2D18
The chargers contain a charging IC chip with accompanying PCB. The two charger will be wired to the two batteries in parallel. The Arduino will then be wired in series

Sikorsky Wireless Test Instrumentation 14
which balances the charge between the batteries. The reason the team chose this product is due to the small size. We will not have a problem implementing the chargers in the electronics compartment.
6 Electronics
6.1 MicrocontrollerWe’ve decided to move the project to the open source Arduino platform. The switch has several advantages compared to the PCB used by last year’s team. Arduino will give us more flexibility in our design, as the platform offers more connectivity with a greater number of inputs, and has a wide range of compatible sensors, which are readily available. Arduino is also available at a much lower price point than similar custom designs. For comparison, the custom built PCB from last year cost the team around $1300, while a stock Arduino nano evaluation board costs around $30 and offers additional functionality. Lastly, Arduino is a mature platform with plenty of documentation. This is arguably the greatest advantage in the platform switch, as any problems or questions that arise during development can likely be solved using the ample sources available online. Last year’s team did not leave much information about the specifics of their design, and it would be a significant hurdle just to learn the full capabilities of their design, which may or may not meet our needs for this year. The one drawback of switching to Arduino would be an increase in power consumption. However, the additional power requirements will be mitigated by the new energy harvesting solution, which will be discussed in detail in section 9.
The particular evaluation board we will use is the Arduino Nano v3.0. We believe this board offers the best combination of features while still fitting inside our size specifications. Measuring just 1.70” by 0.73”, the nano is a compact package that actually reduces the space needed from the custom PCB of last year. It however does not compromise on speed by offering the same 16Mhz Atmel ATmega328

Sikorsky Wireless Test Instrumentation 15
microcontroller that is used on full sized Arduino packages. It also provides 8 analog input pins and 14 digital I/O pins, which should satisfy our connectivity needs.
6.2 Sensors
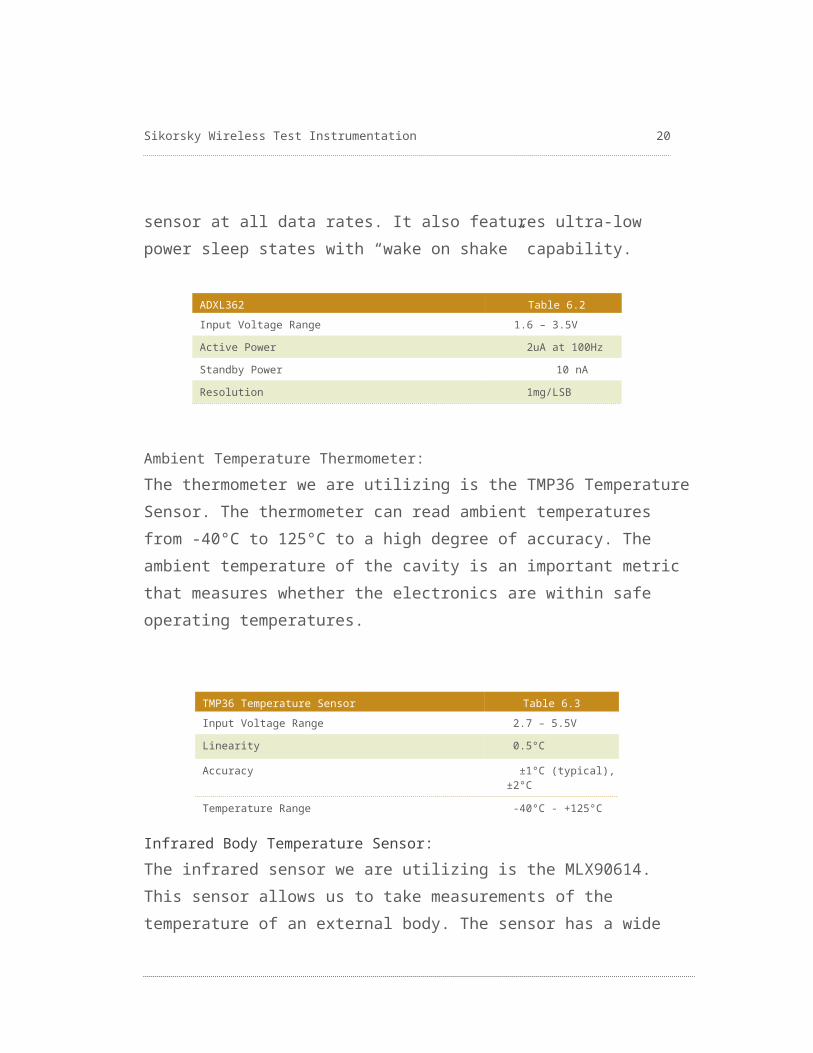
Accelerometer:The accelerometer we are utilizing is the ADXL362; this component is an ultra low power 3 axis MEMS accelerometer. It consumes less than 2uA at 100Hz output data rate. This device samples the full bandwidth of the sensor at all data rates. It also features ultra-low power sleep states with “wake on shake” capability.
Ambient Temperature Thermometer:The thermometer we are utilizing is the TMP36 Temperature Sensor. The thermometer can read ambient temperatures from -40°C to 125°C to a high degree
Arduino Nano v3.0 Specifications Table 6.1Operating Voltage 5VInput Voltage Range 7-12VDigital I/O Pins 14
(6 PWM Outputs)Analog Input Pins 8Flash Memory 32 KBSRAM 2 KBDimensions 0.70” x 1.70”
ADXL362 Table 6.2Input Voltage Range 1.6 – 3.5VActive Power 2uA at 100HzStandby Power 10 nAResolution 1mg/LSB

Sikorsky Wireless Test Instrumentation 16
of accuracy. The ambient temperature of the cavity is an important metric that measures whether the electronics are within safe operating temperatures.
Infrared Body Temperature Sensor:The infrared sensor we are utilizing is the MLX90614. This sensor allows us to take measurements of the temperature of an external body. The sensor has a wide range of measurable temperatures and could theoretically be used to measure the heat given off by a bearing.
Microphone:The microphone we will be utilizing is a CEM-C9745JAD462P2.54R Electret microphone. Although it does not have a direct helicopter application, it will allow us to determine the wireless signal quality.
TMP36 Temperature Sensor Table 6.3 Input Voltage Range 2.7 – 5.5VLinearity 0.5°C
Accuracy ±1°C (typical), ±2°CTemperature Range -40°C - +125°C
MLX90614 Infrared Thermometer Table 6.4Input Voltage 3VAccuracy ±0.5°CResolution 0.02°C - 0.14°CTemperature Range -70°C - +380°C
Electret Microphone Table 6.5Input Voltage Range 2.7V to 5.5VFreq. Range 100-10,000HzSensitivity -46 ± 2dB

Sikorsky Wireless Test Instrumentation 17
6.3 Wireless Transceiver
We are purchasing an add-on board for the Wi-Fi module to make initial prototyping easier. It is not yet known whether it will be used in the final prototype design as it adds considerable bulk.
The wireless transceiver is an RN-XV WiFly module. It is a low power wifi module that operates on the 802.11b/g standard, and supports a serial data rate of 464kps. It also features configurable transmit power for power savings when we don’t need the extra range and a low power sleep mode.
7 Data AnalysisOnce the circuit has been assembled and the wireless system set up to interface with the computer, the data from the sensors will need to be analyzed to confirm the validity of this project. If a wired set of sensors have data similar to data transmitted from the wireless sensor network, this wireless data will be considered a "clean" signal.
XBee Add-on Table 6.6On-board Regulator 3.3V, 250mADimensions 3.7”x1.1”
RN-XV WiFly Module Table 6.7 Average Active Current 38mASleep Current 4uAInput Voltage 3.3V
Serial Data Rate 464 kbpsEncryption Support yesTransmit Power 0 -12 dB
Sikorsky Wireless Test Instrumentation 18
In order to compare signals there are two properties that should be considered: amplitude and frequency. In order to compare amplitude, the data can be sent to an Excel file or to Matlab and plotted. Depending on how the amplitude changes, relative maximum and minimum values can be found at different periods. To compare the frequencies, a fast Fourier transform (FFT) can be calculated using LabView software.[5] Comparisons between the frequencies and amplitudes can also be done in Excel and/or Matlab.
7.1 Data TransmissionOne option to save energy and battery life is to choose that data be sent only when a certain threshold or change triggers the sensor network to output a stream of continuous raw data until the sensor network resets to a sleep state after a set number of signaling cycles. [6] The use of WiFi with the Arduino limits the protocols available for use. TCP and UDP have been considered. TCP is a protocol which confirms that each packet of data has been received once it has been transmitted. This would draw too much power and slow down transmission of data while processing confirmation of received packets. UDP does not check that every packet is received, so it is favorable to TCP for streaming continuous raw data where speed is favored over absolute accuracy.
8 Battery
The Arduino Nano and add-ons can be run through the Arduino’s on-board linear regulator with an input voltage of 7V to 12V or powered directly from a regulated 5V source, preferably using an efficient switching regulator.
Item Current Draw Table 8.1Arduino Nano [7] 17mA (direct 5V power with LED
removed) to 25mA (on-board regulator used, LED intact)
Wi-Fi Module [8] 38mASensors <10mA (depending on sensors chosen)

Sikorsky Wireless Test Instrumentation 19
Total 65mA-73mA
If power is regulated with the on-board linear regulator, total power draw will be 7V * 73mA = 511mWIf power is regulated with an external switching regulator with minimal loss, total power draw will be 5V * 65mA = 325mWUsing the on-board regulator, minimum input voltage (7V) necessitates a 2-cell lithium battery pack (7.4V) or a 6-cell NiCd or NiMH pack (7.2V). Being a linear regulator, all energy from voltage over 5V is dissipated as heat.Sikorsky’s minimum requirement is that the unit must operate 12 hours per day for one year.(12 hours/day)*(365 days/year)*(73mA) = 319740mAhThus, in order to meet Sikorsky’s requirements with a battery alone, the unit would need a 320Ah battery, either as a two-cell lithium pack or a six-cell NiCd/NiMH pack.
Using an external regulator, minimum input voltage could be lower, close to 5V, and potentially slightly lower with a step-up regulator.(12 hours/day)*(365 days/year)*(325mW) = 1423500WhFor a two cell lithium pack,(1432500Wh) / (7.4V) = 384730mAh = 193AhFor a four-cell NiCd/NiMH pack,(1432500Wh) / (4.8V) = 296563mAh = 297Ah
In all cases, the battery requirements cannot be achieved within the unit’s space constraints. Thus, our design will have only a small battery coupled with an energy harvesting unit. The main functions of this battery will be to power the unit during startup and shutdown and to ensure a constant power source, as power received from an energy harvester will vary through time.
Sikorsky Wireless Test Instrumentation 20
Several types of battery were considered:
NiCd NiMH Li-Ion Li-Poly Table 8.2Energy Density [9] Poor Average Good GoodVoltage Output Per Cell [9]
Poor (1.2V) Poor (1.2V) Good (3.6V-4.2V) Good (3.6V-4.2V)
Memory [10] Significant Minimal None NoneCharging Method [11]
Simple Simple More Complex More Complex
Operating Temperature Range [9]
Suitable for low or average temperatures
Average, no specialty
Suitable for average or high temperatures
Suitable for average or high temperatures
Impact/Shock Resistance [9]
Good Good Poor Poor
For this application, lithium polymer cells are the most suitable option due to high energy density, high voltage output per cell, lack of memory issues, and a higher maximum operating temperature than nickel-based cells.
The unit must be able to turn on after 30 days of inactivity. In standby mode, the Arduino draws much less than 1mA of current. Assuming that it draws a full milliampere, we can calculate a battery size that will definitely meet this requirement:1mA * (30 days) * (24 hours / day) = 720mAhThus, a 720mAh or larger 2-cell pack would be more than sufficient for our purposes.
9 Energy Harvesting
The wireless test sensor system will require an energy harvesting unit in order to recharge its battery. This unit will be expected to provide power at least equal to power consumed so that no external charging of the battery is required. Energy harvesting methods investigated include piezoelectric, thermoelectric, and magnetic.

Sikorsky Wireless Test Instrumentation 21
Thermoelectric Piezoelectric Magnetic Table 9.1Power Output Insufficient Insufficient SufficientSize Small Workable WorkableOptimal Operating Conditions
Large temperature gradient
Consistent vibration frequency within narrow band
Fairly high rotation rate
Additional Operating Conditions
-------- -------- Gravitational torque or attachment to stationary component necessary
Piezoelectric energy harvesting will not be able to supply the necessary power for the wireless system. Maximum output for a piezoelectric unit that could fit within the electronics cavity is on the order of tens of milliwatts. One unit in particular [12] was investigated, having the following properties:Operating frequency: 52HzOpen circuit voltage: 20.9VClosed circuit current: (5.7*10-5A/Hz )*(52Hz) = 2.964mAEven if this unit could provide this voltage and current simultaneously (impossible to achieve), the power output would be well below that required of it.(20.9V)*(2.964mA) = 61.9mW < 325mW (minimum power requirement)The space occupied by the unit (3” by 1.25” by 0.07”) also precludes the possibility of fitting more than one within the electronics cavity, and it may even be too large on its own.
Thermoelectric energy harvesting requires a thermal gradient from which to draw energy. Within the electronics cavity, it is expected there will be some temperature difference between the inboard end (closer to the bearing) and outboard end (near ambient air). Sikorsky has not yet provided very specific temperature conditions, so only general approximations can be made at present. The maximum temperature expected within the electronics cavity is approximately 250°F and the temperature at the outboard end of the cavity will likely be somewhat above ambient, between 0°F and 150°F. This leaves a temperature difference of between 100°F and 250°F. The voltage output of a thermoelectric generator is related to the temperature

Sikorsky Wireless Test Instrumentation 22
difference across it by the Seebeck coefficient, S [13].V = -SΔTThe necessary Seebeck coefficient can thus be calculated from temperature conditions and the required voltage.S = V/ΔT(5V) / (250°F) = 0.02V/°F (best case scenario with external regulator and maximum temperature difference)(7V) / (100°F) = 0.07V/°F (worst case scenario with on-board regulation and minimum temperature difference)These values are unrealistically high for a thermoelectric generator, so thermoelectric energy harvesting is unlikely to work for this application.
Magnetic energy harvesting is by far the most promising, but there are significant difficulties with installing such a unit in the rotating electronics cavity due to lack of access to any stationary parts. The only immediately apparent way to overcome this is with a unit that utilizes gravitational torque [14]. Such a unit would consist of a generator mounted to the rotating unit and an off-center weight attached to its shaft. Gravity would keep the weight stationary while the rest of the unit rotates. The amount of torque needed to keep the shaft stationary can be calculated from the power draw and the operating RPM:
Power draw = 325mW, operating at 1200RPM = 20HzTorque = Power / Frequency of rotation0.325W / 20Hz = Torque = 0.01625N*m
The maximum available torque from a weight within the compartment can be calculated from its dimensions and density. The weight is assumed to be a half cylinder:
Radius of electronics compartment = 0.75in = 0.01905mCentroid of half circle is located at 4r/3π from circle center = 0.008085mArea of half circle = πr2/2 = 0.0005700m2
Torque = length*area*density*centroid radius*gravitational accelerationAssume lead weight, density = 11340kg/m3

Sikorsky Wireless Test Instrumentation 23
Setting the torque provided by the weight equal to the torque needed for the power draw allows calculation of the minimum length of weight needed:
0.01625N*m = length*0.0005700m2*11340kg/m3*0.008085m*9.8m/s2
minimum length = 0.0317m = 1.25inThis length is a little larger than ideal, but should still be possible to fit with the other components. Using a more dense material, such as tungsten, a smaller weight could be used, reducing the space concerns.There are limitations to the gravitational torque design that would likely create problems when used in a helicopter- when at extreme angles, the weight would no longer be kept stationary and could potentially begin rotating, producing significant vibrations. Thus, alternatives to gravitational torque will continue to be explored.
The generator in this design will be an electric motor. The most important property of the motor for our purposes is the KV rating. This is the RPM output of the motor per volt input. The inverse of this will provide the approximate voltage output for a given RPM input when the motor is used as a generator. An estimate of the KV rating needed can be calculated from the RPM of the tail rotor and the input voltage needed to charge the batteries: (1200RPM) / (7.4V) = 162RPM/VThis is a fairly low KV rating, and most available motors of this rating are too large to fit within the electronics compartment. Gearing allows us to run a higher KV motor at a higher RPM in order to get a high enough voltage output. One motor with a built-in gearbox [15] was selected, as it has a low enough effective KV for our purposes. A smaller generator [16] was also purchased with the intention of building a gearbox for it. From the voltage/RPM data given, it provides 1.5V at 500RPM = 333KV. In order to provide at least 7.4V, the following gear ratio is needed:7.4 = 1200*r / 333r = 2.05A gear ratio of 2.5 to 1 would provide more than sufficient voltage to charge the cells at 1200RPM.

Sikorsky Wireless Test Instrumentation 24
10 Test Rig
The previous team (from 2012-2013), created a rig in order to test the wireless sensing system[1]. This team’s main goal was to test and analyze specific parameters of a rotating system through the use of sensors. What was produced was a mock-up of the tail rotor without the propellers. The rig has an open compartment on the end to insert the electronics capsule into and holes bored for screws which mount the capsule onto the rig once it is in the compartment. Since the size of our electronics cavity is the same dimensions as the previous year, we will be reusing the same motor and attached rig. We have ideas to modify the rig to work better with our design this year outlined below in this section.
A variable-speed electric motor was mounted to a plate. The driveshaft of the motor was then connected to a shaft of the same diameter via a clutching mechanism. The shaft then tapers to the diameter of the helicopter’s rotor shaft and its length at this diameter is just longer than the electronics capsule, which fits into a center-bored cylindrical cavity, opening to the end. There are two sets of bearings: the smaller is a spherical cartridge bearing, along the taper and the larger is a roller cartridge bearing, around the midsection of the wider portion of the shaft (the portion with the same diameter as the rotor shaft). The bearings are mounted to the same plate as the motor. The use of cartridge bearings last year allowed for the team to switch out a working bearing with an intentionally damaged bearing to see if they could test the difference with their sensing system. The previous team did research into the bearings and found the larger bearing to fit the design specifications designated by Sikorsky. It was originally thought that these bearings would need replacement because they created a loud scraping sound, which would interfere with sensing via a microphone, but upon inspection of their physical condition, it was found that they only needed lubrication from a Teflon spray to reduce the noise.

Sikorsky Wireless Test Instrumentation 25
Potential Modifications to the Test Rig:The main purpose of this design project is to be able to transmit, receive and then analyze data from the sensor network, but if time is available, the plate may be mounted so the pitch of the motor and shaft can change. The data from an accelerometer in the cavity could be used to derive the pitch angle of the mount and confirm the validity of the project. Since we will be using different circuitry and electronics from last year, the electronics capsule may need to be redesigned as well to better hold everything in place.
Figure 7. Test rig created by the previous team (2012-2013)
11 Budget
Sikorksy has granted team EE193/ME32 a budget of $2,000 to update and redesign the 2012-2013 Wireless Network System[1]. The team has planned to utilize the mechanical components from the previous year, which should reduce the total cost to prototype and test the design.

Sikorsky Wireless Test Instrumentation 26
11.1 Costs to Date and Estimated CostsThe cost of components ordered are shown below, as well as cost estimates for planned components, which have not yet been finalized.
12 Timeline
Shopping List Table 11.1Arduino Nano $70.00Mini B USB Cable $4.50XBee Add-On Board $25.00
Wifi Module $35.00Nano Protoshield $15.00Triple Axis Accelerometer $15.00Infrared Thermometer $20.00Thermometer $1.50
Electret Microphone $8.00Motor/Generator $59.10Power Management Circuitry (Estimated) $30.00Battery $83.60Battery Charging Circuit $40.00Wires $8.50Printed Circuit Boards (Estimated) $200.003D Printed Electronics Capsule (Estimated) $10.00 Total Price $625.2

Sikorsky Wireless Test Instrumentation 27
The team has come up with an orderly timeline in order to track our progress. The timeline illustrated below displays our project goals over the course of the year.
Figure 8. EE193/ME32 Timeline for 2013-2014
13 References

Sikorsky Wireless Test Instrumentation 28
[1] Bienkowski, Bogan, Browning, Golob, Handahl, Neaton and Thompson, “Wireless Test Instrumentation System for Rotating Parts” 2013. Nov2013 Web. <http://ecesd.engr.uconn.edu/ecesd167/files/2012/09/team29_report.docx>
[2] “2.25-A, Wide-Input Adjustable Switching Regulator” 2013.Texas Instruments Inc. Nov2013 Web.<http://www.ti.com/lit/ds/slts235d/slts235d.pdf>
[3] Hunter and Rowland, “Digital Designer’s Guide to Linear Voltage Regulators and Thermal Management” 2003. Nov2013 Web. <http://www.ti.com/lit/an/slva118/slva118.pdf>
[4] “Understanding How a Voltage Regulator Works” 2009. Analog Devices Inc. Nov2013 Web.<http://www.analog.com/static/imported-files/pwr_mgmt/PM_vr_design_ 08451a.pdf>
[5] "Discrete Fourier transform" princeton.edu. Princeton University [US]. Nov2013 Web. <http://www.princeton.edu/~achaney/tmve/wiki100k/docs/Discrete_Fourier_transform.html>.
[6] Paradis and Han, "A data collection protocol for real-time sensor applications." Pervasive and Mobile Computing Vol.5-2009: p.369-384. Microsoft Corporation [US], Department of Math and Computer Sciences, Colorado School of Mines [US] Nov2013 Web.<http://inside.mines.edu/fs_home/qhan/ research/publication/pmc09.pdf>
[7] "Arduino Board Nano" arduino.cc. Nov 2013. Arduino SA. Nov2013 Web.<http://www.arduino.cc/en/Main/ArduinoBoardNano>.
[8] "RN-XV WiFly Module - Wire Antenna" sparkfun.com. 2011. Spark Fun Electronics Inc [US]. Nov2013 Web.<https://www.sparkfun.com/products/10822>.
[9] Linden and Reddy, "Engineering Processes Battery Primer" Handbook of batteries. Massachusetts Institute of Technology. Nov2013 Web.<http://web.mit.edu/2.009/www/resources/mediaAndArticles/ batteriesPrimer.pdf>.
[10] Buchmann, Isidor. "Memory: Myth or Fact" batteryuniversity.com. Mar2011. Cadex Electronics Inc. [CA]. Nov2013 Web. <http://batteryuniversity.com/learn/article/memory_myth_or_fact>.
[11] Keeping, Steven. "A Designer's Guide to Lithium Battery Charging" digikey.com. Sep2012. Digi-Key Corporation [US]. Nov2013 Web.<http://www.digikey.com/us/en/techzone/power/resources/articles/a-designer-guide-lithium-battery-charging.html>.
[12] "Piezoelectric Energy Harvesting Kit." Piezo Systems CATALOG . Vol8-2011: p.20-21. Piezo Systems, Inc. [US]. Nov2013 Web. <http://www.piezo.com/prodproto4EHkit.html><http://www.piezo.com/ catalog8.pdf%20files/Cat8.20&21.pdf>
[13] Molki, Arman. "Simple Demonstration of the Seebeck Effect " scienceeducationreview.com Science Education Review Vol. 9(3)-2010. The Petroleum Institute, Abu Dhabi [UAE]. Nov2013 Web. <http://www.scienceeducationreview.com/open_access/molki-seebeck.pdf>.
[14] Toh, Bansal, Hong, Mitcheson, Holmes and Yeatman, "Energy Harvesting from Rotating Structures" imperial.ac.uk. 2007. Department of Electrical & Electronic Engineering, Imperial College London [UK]. Nov2013 Web. <http://www3.imperial.ac.uk/pls/portallive/docs/1/34453718.PDF>.
[15] "Wind Turbine Generator W/ Wires" kidwind.org. Kid Wind Project. Nov2013 Web. <http://store.kidwind.org/wind-energy-kits/parts-materials/parts-to-build-a-turbine/ wind-turbine-generator>.
[16] "Amico DC 12V 50mA 500RPM 0.3Kg-cm High Torque Permanent Magnetic DC Gear Motor" amazon.com. Amico. Nov2013 Web. <http://www.amazon.com/Amico-500RPM-0-3Kg-cm-Permanent-Magnetic/dp/B00858RX36/ref=sr_1_19?ie=UTF8&qid=1384970142&sr=8-19&keywords=dc+motor>.