the advantages of generative grammatical encodings for physical design
TRANSCRIPT

The Advantagesof GenerativeGrammatical Encodingsfor Physical Design
GregoryS.Hornby415SouthStreet
DEMO LabBrandeisUniversityWaltham,MA 02454
Jordan B. Pollack415SouthStreet
DEMO LabBrandeisUniversityWaltham,MA 02454
Abstract- One of the applications of evolutionary algo-rithms is the automatic creation of designs. For evolu-tionary techniquesto scaleto the complexitiesnecessaryfor actual engineeringproblems,it has beenargued thatgenerative systems,where the genotypeis an algorithmfor constructing the final design,shouldbeusedasthe en-coding. Wedescribea systemfor creatinggenerativespec-ifications by combining Lindenmayer systemswith evolu-tionary algorithms and apply it to the problemof generat-ing table designs.Designsevolvedby our systemreachanorder of magnitude more parts than previous generativesystems. Comparing it against a non-generative encod-ing we find that the generative systemproducesdesignswith higher fitnessand is faster than the non-generativesystem.Finally, we demonstratethe ability of our systemto go fr om designto manufactureby constructing evolvedtable designsusing rapid prototyping equipment.
1 Intr oduction
Evolutionary algorithms(EAs) have beensuccessfullyap-plied to a variety of designproblems[1, 2, 3], but it hasyet to beshown thatevolutionarytechniquescanscaleto thecomplexitiesnecessaryfor typical designprojects.Pastworkhastypically useda direct encodingof the solution, eitherby parameterizingthe searchspace[1] or through a com-ponentbasedrepresentationof the solution [4, 5, 6]. It hasbeenarguedthat a generative encodingscheme,an encod-ing thatspecifieshow to constructthephenotype,canachievegreaterscalabilitythroughself-similarandhierarchicalstruc-ture [7, 8]. In addition,by re-usingpartsof the genotypeinthecreationof thephenotypeagenerativeencodingis amorecompactencodingof a solution. Someexamplesof genera-tivesystemsarecellularautomatarulesto produce2D shapes[9], context rulesto produce2D tiles[10], graphencodingfor3D animatedcreatures[11], andcellularencodingfor artifi-cial neuralnetworks[12].
Herewe useLindenmayersystems(L-systems)asa gen-erative encodingfor an EA. L-systemsare a grammaticalrewriting systemintroducedto model the biological devel-opmentof multicellularorganisms[13]. Rulesareappliedinparallelto all charactersin thestringjustascell divisionshap-penin parallel in multicellular organisms.Complex objectsarecreatedby successively replacingpartsof a simpleobject
by usingthesetof rewriting rules.L-systemshavebeenusedmainly to constructplants [14]. However, it is difficult tohand-makeanL-systemto producea desiredform. Previouswork combiningL-systemswith EAs hasbeento generateplant-like structures[14, 15, 16, 17] and architecturalfloordesigns[18] – but only limited resultshavebeenachieved.
Our work evolving L-systemsusesparametric,context-free L-systems(P0L-systems),a morepowerful classof L-systemsthan hasbeenpreviously evolved. Using this sys-temwe definea component-basedlanguagefor constructingobjectsmadeof voxels anddefinea fitnessfunction for ta-bledesignsfor whichweevolvetabledesignswith thousandsof voxels. We comparethe generative encodingto a non-generativeencodingandfind thatbetterdesignsevolve fasterwith the L-systemasa generative encodingandthe designshave more complex regularitiesthando tablescreatedwiththenon-generativerepresentation.Evolvedtablesarethenau-tomaticallymanufacturedusingrapidprototypingequipment.
In the following sectionwe outline the designspaceanddescribethecomponentsof ourgenerativedesignsystem.Wethengiveexamplesof tablesevolvedwith thedifferentencod-ing schemesanddiscusstheresults.
2 Method
The systemfor creatinggenerative designsconsistsof thedesignbuilder and evaluator, the L-systemmoduleand theevolutionaryalgorithm. L-systemsareevolvedby theevolu-tionary algorithmwith individual L-systemsscoredfor theirgoodnessby thedesignbuilderandsimulator. Theendresultof oursystemare3D staticstructures;in thispaperweevolvetables.
2.1 DesignBuilder and Evaluator
The designconstructorbuilds a model from a sequenceofbuild commands.Oncebuilt, amodelis simulatedandevalu-ated.Commandsarelistedin table1.
Thecommandstringconsistsof a sequenceof build com-mandsthat give instructionsto a LOGO-styleturtle that isused to constructan object out of voxels. The 3D ma-trix of voxels starts out empty and voxels are filled asthe turtle enters them. [ and ] push and pop the cur-rent state– consistingof the current and orientation– toand from a stack. Forward moves the turtle forward in

Table1: DesignLanguageCommand Description Symbol
[ ] push/poporientationto stack [ ]������������ ����repeat enclosed block
�times
���
forward ����
move in the turtle’s positiveX direction
�units
f
backward ����
move in the turtle’s negativeX direction
�units
b
up ����
rotateheading���������
abouttheturtle’sZ axis
�
down ����
rotate heading�����������
abouttheturtle’sZ axisv
left ����
rotateheading���������
abouttheturtle’sY axis
�
right ����
rotate heading�����������
abouttheturtle’sY axis
clockwise ����
rotateheading���������
abouttheturtle’sX axis
!
counter-clockwise
���� rotate heading�����������
abouttheturtle’sX axis
"
the currentdirection and backwardsmoves the turtle backone space,both placea block in the spaceif noneexists.Turn left/right/up/down/clockwise/counter-clockwise rotatetheturtle’sheadingabouttheappropriateaxisin unitsof
�#�#�.
Commandsequencesenclosedby�$�
arerepeateda numberof timesspecifiedby thebrackets’argument.
(a) (b)
Figure1: Two examplestructures.
For example,thestring,[�
[ forward(6) ] left(1)�(4) ] up(1) forward(3) down(1)[�
[ forward(4.5) ] left(1)�(4) ] up(1) forward(3) down(1)[�
[ forward(3) ] left(1)�(4) ] up(1) forward(3) down(1)for-
ward(3)is interpretedas:[ [ forward(6) ] left(1) [ forward(6) ] left(1) [ forward(6) ]left(1) [ forward(6) ] left(1) ] up(1) forward(3) down(1)[ [forward(4.5)] left(1) [ forward(4.5)] left(1) [ forward(4.5)]left(1) [ forward(4.5)] left(1) ] up(1)forward(3) down(1)[ [
forward(3)] left(1)[ forward(3)] left(1)[ forward(3)] left(1)[ forward(3) ] left(1) ] up(1)forward(3)down(1)forward(3)andproducesthestructurein figure1.a.
As the constructionlanguageonly allows voxels to beplacednext to existing voxels, evolved designsareguaran-teedto generatea single, connectedstructure. The designsimulatorthendeterminesthe stability of the object. OnceanL-systemspecificationis executed,andthestabilityof theobjectis determined,theresultingstructureis evaluatedusingthefitnessfunctiondescribedin section3.
2.2 Parametric 0L-Systems
Theclassof L-systemsusedastheencodingis a parametric,context-free L-system (P0L-system). Formally, a P0L-systemis definedasanorderedquadruplet,G = (V, % , & , P)where,
V is thealphabetof thesystem,% is thesetof formalparameters,&(' *)+��,�-.�0/
is anonemptyparametricwordcalledtheaxiom,andP 1 2)3� % -�4�656 % �7�8 *)3�69: % �;�<- is afinite setofproductions.
Thesymbols: and = areusedto separatethe threecompo-nentsof a production:thepredecessor, theconditionandthesuccessor. For example,aproductionwith predecessorA(n0,n1),conditionn1 5 andsuccessorB(n1+1)cD(n1+0.5,n0-2)is writtenas:
> ��?�:@;�7AB�DC��7A FE =HG ��7AJIKAL�0�MN ��7AJIO�:P E @;�?����Q��
A productionmatchesa modulein a parametricword if f theletter in the moduleand the letter in the productionprede-cessorarethe same,the numberof actualparametersin themoduleis equalto the numberof formal parametersin theproductionpredecessor, and the condition evaluatesto trueif the actualparametervaluesaresubstitutedfor the formalparametersin theproduction.
For implementationreasonswe add constraintsto ourP0L-system. The condition is restricted to be compar-isons as to whether a production parameteris greaterthan a constantvalue. Parametersto design commandsare either a constant value or a production parameter.Parameters to productions are equations of the form:R4SUT���V#WX��Y[Z\�B�3SX]#T�]�^�_.Y0_LTa`����B��b.Y0]��cYKdeRfIg`h� `��`:"$d�RBSUT���V�Wi�jY[Z[�B�eSk]�T�]#^�_LY0_LTe`l���B��b.Y0]��cY4d
. The followingis a P0L-systemusing the languagedefinedin table 1 andconsistsof two productionswith eachproductioncontainingonecondition-successorpair:
m �U ��?����C�?� A#P � = R m A# ��?��noA�P E �cdlW�Sp ;AL�pqi�BTLro]#T�VX �s��V��Br��4 0AB� m �U ��?�t�(AL�m A# ��?����C�?� A#P � = �$RLqi�BTBr�]�T�VX ��?�#�pd:�*_BqXY� ;AL�7�� �ul�

StartingthisP0L-systemwith P0(4),producesthefollow-ing sequenceof strings,
P0(4)
[ P1(6)] up(1)forward(3) down(1)P0(3)
[�
[ forward(6) ] left(1)�(4) ] up(1) forward(3) down(1)[
P1(4.5)] up(1)forward(3)down(1)P0(2)
[�
[ forward(6) ] left(1)�(4) ] up(1) forward(3) down(1)[�
[ forward(4.5) ] left(1)�(4) ] up(1) forward(3) down(1)[
P1(3)] up(1)forward(3)down(1)P0(1)
[�
[ forward(6) ] left(1)�(4) ] up(1)forward(3)down(1)[
�[ forward(4.5)] left(1)
�(4) ] up(1)forward(3) down(1)[
�[
forward(3) ] left(1)�(4) ] up(1)forward(3) down(1)
The last string of commandsproducesthe tree in fig-ure1.a. Treesof arbitrarysizecanbecreatedby startingtheproductionsystemwith a differentargument– thetreein fig-ure1.bis createdfrom this systemby startingit with P0(6).
2.3 Evolutionary Algorithm
An evolutionary algorithm is usedto evolve individual L-systems. The initial populationof L-systemsis createdatrandomand then evolution then proceedsby iteratively se-lecting a collectionof individualswith high fitnessfor par-entsandusingthemto createa new populationof individualL-systemsthroughmutationandrecombination.In additionto the L-system,eachindividual alsocontainsvaluesfor theinitial calling parametersof the first productionrule andthemaximumnumberof iterationupdatesto beperformed.Wenow describehow theinitial populationof L-systemsaregen-eratedandthenhow variationis appliedto them.
2.4 Initialization
L-systemshave a predeterminednumberof productionruleswith a fixednumberof argumentsandproductionbodies.Anew L-systemis createdby generatingarandomstringof 3 to8 build commandsfor eachproductionbody– for trialsusinga singlecommandstringthis 4 to 104commands– in blocksof 1 to 3 commands.Eachaddedblock canbe enclosedbypush/popbrackets[ a(1)] , block-repetitionparenthesis
�b(1)
c(2)�(3), or not at all d(1) e(2)f(3).
2.5 Mutation
Mutation createsa new individual by copying the parentin-dividual andmakinga small changeto it. First a productionrule is selectedat randomfrom oneof the usedproductionrules and then this rule is changedin someway. Changesthatcanoccurare:replacingonecommandwith another;per-turbingtheparameterto a commandby adding/subtractinga
small valueto it; changingthe parameterequationto a pro-duction; adding/deletinga sequenceof commandsin a suc-cessor;changingthe conditionequation;or encapsulatingablock of commandsandturning it into a, previously unused,productionrule.
For example,if the productionm �
is selectedto be mu-tated,m �U ��?�:@<�7AL�DCv�?� FE P � = �w]i 0A�P �#�p�� *Q:P ���7�l ��7AB�
�?� Q:P � = R m A� ��7Aw�xA#P �U@;�?�l!yQJP �#�kd
someof thepossiblemutationsare,Mutatethecondition:m �U ��?�:@<�7AL�DCv�?� {z P}| = �w]i ;A�P �#���y *QJP �#�7�� ��7AL�
�?� Q:P � = R m A� ��7Aw�xA#P �U@;�?�l!yQJP �#�kd
Mutateanargument:m �U ��?�:@;�7AB�DCv�?� FE P � = �w]X ;A�P �#�~�� *Q:P �����l ��7AL�
�?� Q:P � = R m A# *�������?P |?@;�?�l!yQJP �#�id
Mutatea symbol:m �U ��?�:@<�7AL�DCv�?� FE P � = �w�U ;�kP}|k�~�� 2QJP �#�4�� ��7AB�
�?� Q:P � = R m A� ��7Aw�xA#P �U@;�?�l!yQJP �#�kd
Deleterandomcharacter(s):m �U ��?�:@<�7AL�DCv�?� FE P � = �w]i 0A�P �#�7�� ��7AL�
�?� Q:P � = R m A� ��7Aw�xA#P �U@;�?�l!yQJP �#�kd
Inserta randomsequenceof character(s):m �k ��?�U@;�7AL�DCv�?� FE P � = ��]i 0A�P �#�c�y *QJP �#�p�l ��7AB�i�U *��P}|k�
�?� QJP � = R m A# ��7A��(A�P �:@<�?��!�QJP �#�kd
Encapsulatea blockof characters:m �k ��?�U@;�7AL�DC �?� FE P � = ������ ���|�@<�D�l�4�� ��7AL�
�?� QJP � = R m A# ��7A��(A�P �:@<�?��!�QJP �#�kd���� ���|�@<�D�l��C���| �z P}| =H� 0�XP |X�?�w 2�?P}|k���| �cP}| =H� 0�XP |X�?�w 2�?P}|k�
2.6 Recombination
Recombinationtakestwo individuals,SpA
andSXQ
, asparentsandcreatesonechild individual,
�, by makingit a copy of
S�Aandtheninsertinga smallpartof
SiQinto it. This is doneby
replacingonesuccessorof�
with asuccessorofSXQ
, insertinga sub-sequenceof commandsfrom a successorin
SiQinto
�,
or replacinga sub-sequenceof commandsin a successorof�
with a sub-sequenceof commandsfrom asuccessorinSiQ
.For exampleif parent1 hasthefollowing rule,m sU ��?�:@<�7AL�DCv�?� FE P � = ��]i 0A#P ������ 2QJP �#���l ��7AB�
�?� Q:P � = R m A� ��7A��(A�P �:@;�?�l!yQ:P ���kd
andparent2 hasthefollowing rule,m sU ��?�:@;�7AB�DCv�7A sUP � = �� *s:P �#��]X 2QJP �#�
�?� A#P � = m A� ��7A��(A�P �:@;�7A���QJP �#�

Thensomeof thepossibleresultsof a recombinationon suc-cessorP3are:Replaceanentirecondition-successorpair:
m sU ��?�:@<�7AL�DC��D� ��P}| = �� 2�?P}|X� � \�cP}|X��?� Q:P � = R m A� ��7A��(A�P �:@;�?�l!yQ:P ���kd
Replacejust asuccessor:
m sU ��?�:@;�7AB�DCv�?� FE P � = �w]X ;A�P �#�p�� *Q:P ���7�l ��7AL��?� Q:P � = �6�i ��D���(�kP}|?@��������?P |X�
Replaceoneblockwith another:
m sk ��?�:@<�7AL�DCv�?� {E P � = ��]i 0A#P ���p�� 2QJP �#�7�� ��7AB��?� QJP � = R.�w *��P}|k� � 2�?P}|k�?d
3 Experimentsand Results
In this sectionwe presentthe resultsof evolving tableswiththe non-generative encoding,andthe P0L-systemasa gen-erative encoding.All trials arerun for a maximumof 1000generationsusingan evolutionaryalgorithm with 100 indi-viduals. Thebest2 individualsof onegenerationarecopiedto the next (an elitism of 2) and remainingindividuals arecreatedwith anequalprobabilityof usingmutationor recom-bination. The grid size for evolved tablesis 40 wide
�40
deep�
40 high – exceptfor thethegrid usedfor tablesthatweremanufactured,which usea grid of 50 wide
�20 deep�
20 high.
0
500000
1e+06
1.5e+06
2e+06
2.5e+06
3e+06
3.5e+06
4e+06
0 100 200 300 400 500 600 700 800 900 1000
fitne
ss�
generation
generativenon-generative
Figure 2: Performancecomparison between the non-generative encodingand the P0L-systemgenerative encod-ing.
The fitnessof a table is a function of its height, surfacestructure,stabilityandnumberof excessvoxelsused.Heightis thenumberof voxelsabove the ground.Surfacestructureis the numberof voxels at the maximumheight. Stabilityis a function of the volumeof the tableandis calculatedbysummingthe areaat eachlayer of the table,except for the
surface. Maximizing height, surfacestructureand stabilitytypically resultin tabledesignsthataresolid volumes,thusameasureof excessvoxels is usedto reward designsthat usefewerbricks.
qy�B�[���j�.���theheightof thehighestvoxel, �k���j� Pq��[�B��� �� �¡�thenumberof voxelsat �k���j� P
qy�\� �¢ ��£¤����¥ � ¦L§�¨<©�ª?«¬¥�c® q � �¯� � �°:�
q � ��� � �°:���areain theconvex hull atheighty.qy� �B �0�0�±�numberof voxelsnot on thesurface.
For theseexperimentswecombinethesemeasuresinto asin-gle function1,
fitness��q��L�0�¤���.�w��qy�0�L�¯� �� �o��q��\� ��¢ �¤£��¤��¥#!�qy� �B �0�0� (1)
(a) (b)
(c) (d)
(e) (f)
Figure3: Tablesevolvedusinganon-generativeencoding.
1A moreappropriatemethodof evolving againstthesecriteriamaybetouseamulti-objective approach[19].
(a) (b)
(c) (d)
(e) (f)
(g) (h)
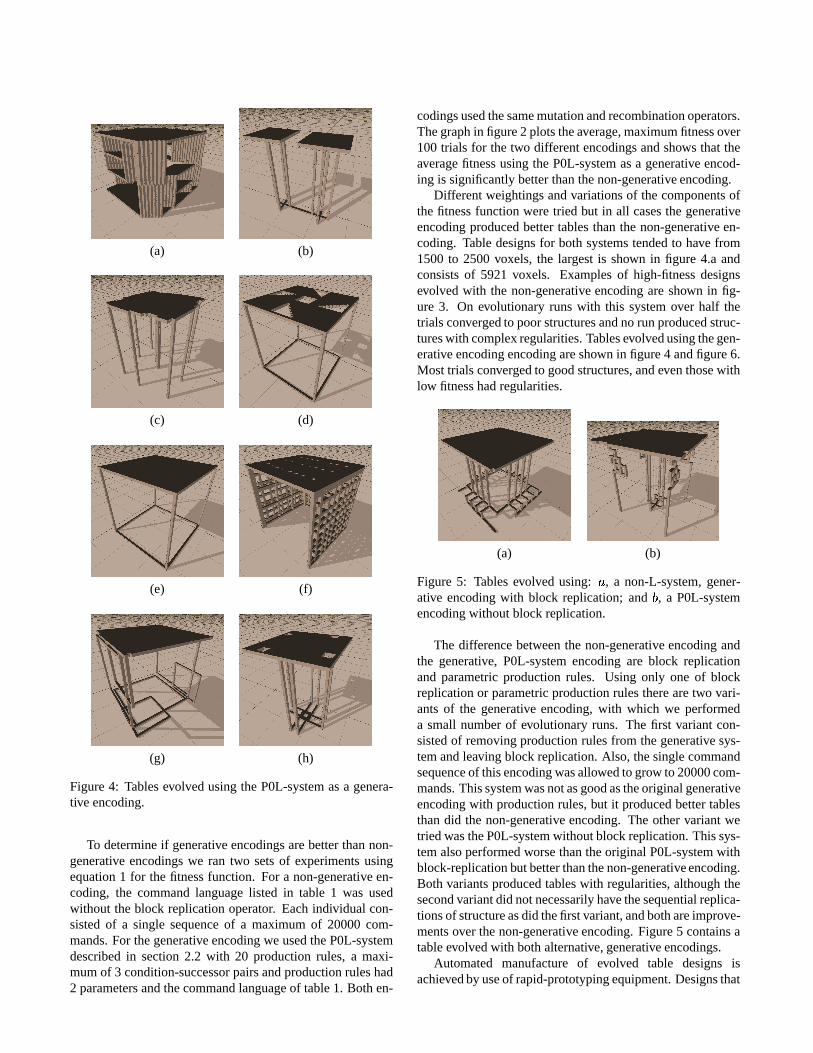
Figure4: Tablesevolvedusingthe P0L-systemasa genera-tiveencoding.
To determineif generative encodingsarebetterthannon-generative encodingswe ran two setsof experimentsusingequation1 for the fitnessfunction. For a non-generative en-coding, the commandlanguagelisted in table 1 was usedwithout theblock replicationoperator. Eachindividual con-sistedof a single sequenceof a maximumof 20000com-mands.For thegenerativeencodingwe usedtheP0L-systemdescribedin section2.2 with 20 productionrules, a maxi-mumof 3 condition-successorpairsandproductionruleshad2 parametersandthecommandlanguageof table1. Bothen-
codingsusedthesamemutationandrecombinationoperators.Thegraphin figure2 plotstheaverage,maximumfitnessover100 trials for thetwo differentencodingsandshows that theaveragefitnessusingthe P0L-systemasa generative encod-ing is significantlybetterthanthenon-generativeencoding.
Differentweightingsandvariationsof thecomponentsofthefitnessfunctionweretried but in all casesthe generativeencodingproducedbettertablesthanthe non-generative en-coding. Tabledesignsfor bothsystemstendedto have from1500to 2500voxels, the largestis shown in figure 4.a andconsistsof 5921 voxels. Examplesof high-fitnessdesignsevolved with the non-generative encodingareshown in fig-ure 3. On evolutionary runswith this systemover half thetrialsconvergedto poorstructuresandnorunproducedstruc-tureswith complex regularities.Tablesevolvedusingthegen-erativeencodingencodingareshown in figure4 andfigure6.Most trialsconvergedto goodstructures,andeventhosewithlow fitnesshadregularities.
(a) (b)
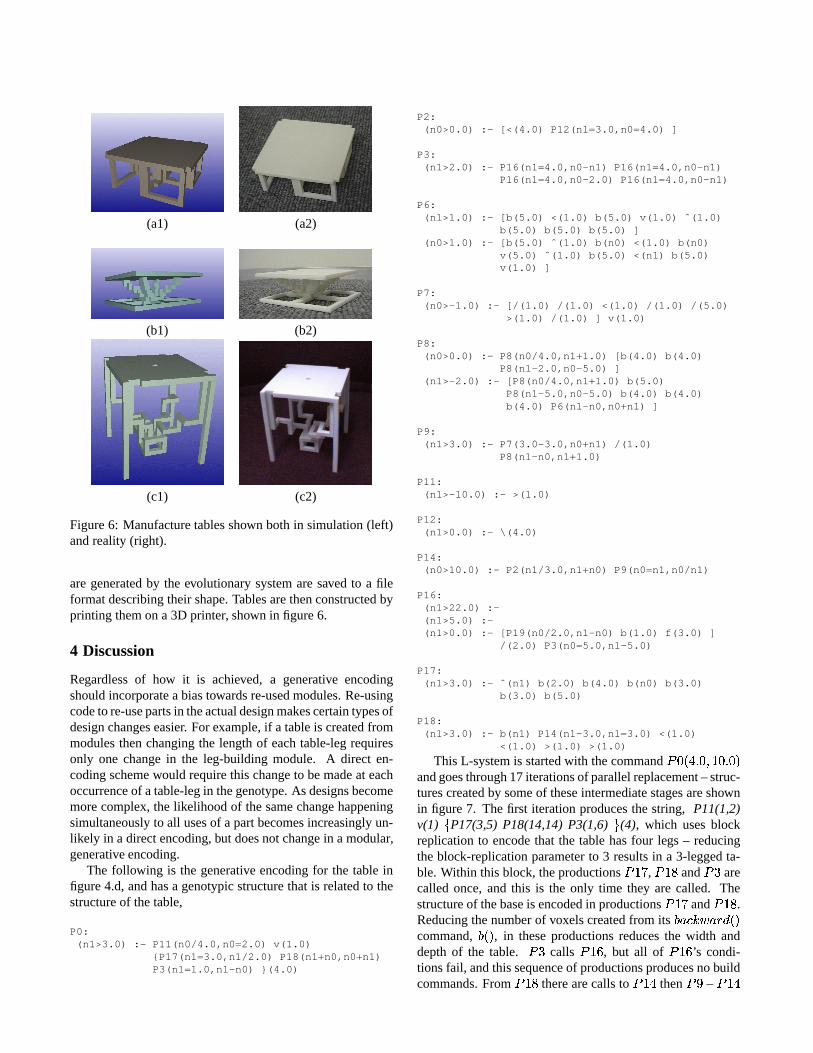
Figure 5: Tablesevolved using:], a non-L-system,gener-
ative encodingwith block replication;and�, a P0L-system
encodingwithout block replication.
The differencebetweenthe non-generative encodingandthe generative, P0L-systemencodingare block replicationand parametricproductionrules. Using only one of blockreplicationor parametricproductionrulestherearetwo vari-antsof the generative encoding,with which we performeda small numberof evolutionaryruns. The first variantcon-sistedof removing productionrulesfrom thegenerative sys-temandleaving block replication.Also, thesinglecommandsequenceof thisencodingwasallowedto grow to 20000com-mands.Thissystemwasnotasgoodastheoriginalgenerativeencodingwith productionrules,but it producedbettertablesthandid the non-generative encoding.The othervariantwetriedwastheP0L-systemwithoutblockreplication.Thissys-temalsoperformedworsethantheoriginal P0L-systemwithblock-replicationbut betterthanthenon-generativeencoding.Both variantsproducedtableswith regularities,althoughthesecondvariantdid notnecessarilyhavethesequentialreplica-tionsof structureasdid thefirst variant,andbothareimprove-mentsover thenon-generativeencoding.Figure5 containsatableevolvedwith bothalternative,generativeencodings.
Automated manufacture of evolved table designs isachievedbyuseof rapid-prototypingequipment.Designsthat
(a1) (a2)
(b1) (b2)
(c1) (c2)
Figure6: Manufacturetablesshown bothin simulation(left)andreality (right).
aregeneratedby the evolutionarysystemaresaved to a fileformatdescribingtheir shape.Tablesarethenconstructedbyprinting themon a 3D printer, shown in figure6.
4 Discussion
Regardlessof how it is achieved, a generative encodingshouldincorporateabiastowardsre-usedmodules.Re-usingcodeto re-usepartsin theactualdesignmakescertaintypesofdesignchangeseasier. For example,if a tableis createdfrommodulesthenchangingthe lengthof eachtable-leg requiresonly one changein the leg-building module. A direct en-codingschemewould requirethis changeto bemadeat eachoccurrenceof atable-leg in thegenotype.As designsbecomemorecomplex, the likelihoodof thesamechangehappeningsimultaneouslyto all usesof a partbecomesincreasinglyun-likely in a directencoding,but doesnot changein a modular,generativeencoding.
The following is the generative encodingfor the tableinfigure4.d,andhasa genotypicstructurethat is relatedto thestructureof thetable,
P0:(n1>3.0) :- P11(n0/4.0,n0=2.0) v(1.0)
{P17(n1=3.0,n1/2.0) P18(n1+n0,n0+n1)P3(n1=1.0,n1-n0) }(4.0)
P2:(n0>0.0) :- [<(4.0) P12(n1=3.0,n0=4.0) ]
P3:(n1>2.0) :- P16(n1=4.0,n0-n1) P16(n1=4.0,n0-n1)
P16(n1=4.0,n0-2.0) P16(n1=4.0,n0-n1)
P6:(n1>1.0) :- [b(5.0) <(1.0) b(5.0) v(1.0) ˆ(1.0)
b(5.0) b(5.0) b(5.0) ](n0>1.0) :- [b(5.0) ˆ(1.0) b(n0) <(1.0) b(n0)
v(5.0) ˆ(1.0) b(5.0) <(n1) b(5.0)v(1.0) ]
P7:(n0>-1.0) :- [/(1.0) /(1.0) <(1.0) /(1.0) /(5.0)
>(1.0) /(1.0) ] v(1.0)
P8:(n0>0.0) :- P8(n0/4.0,n1+1.0) [b(4.0) b(4.0)
P8(n1-2.0,n0-5.0) ](n1>-2.0) :- [P8(n0/4.0,n1+1.0) b(5.0)
P8(n1-5.0,n0-5.0) b(4.0) b(4.0)b(4.0) P6(n1-n0,n0+n1) ]
P9:(n1>3.0) :- P7(3.0-3.0,n0+n1) /(1.0)
P8(n1-n0,n1+1.0)
P11:(n1>-10.0) :- >(1.0)
P12:(n1>0.0) :- \(4.0)
P14:(n0>10.0) :- P2(n1/3.0,n1+n0) P9(n0=n1,n0/n1)
P16:(n1>22.0) :-(n1>5.0) :-(n1>0.0) :- [P19(n0/2.0,n1-n0) b(1.0) f(3.0) ]
/(2.0) P3(n0=5.0,n1-5.0)
P17:(n1>3.0) :- ˆ(n1) b(2.0) b(4.0) b(n0) b(3.0)
b(3.0) b(5.0)
P18:(n1>3.0) :- b(n1) P14(n1-3.0,n1=3.0) <(1.0)
<(1.0) >(1.0) >(1.0)
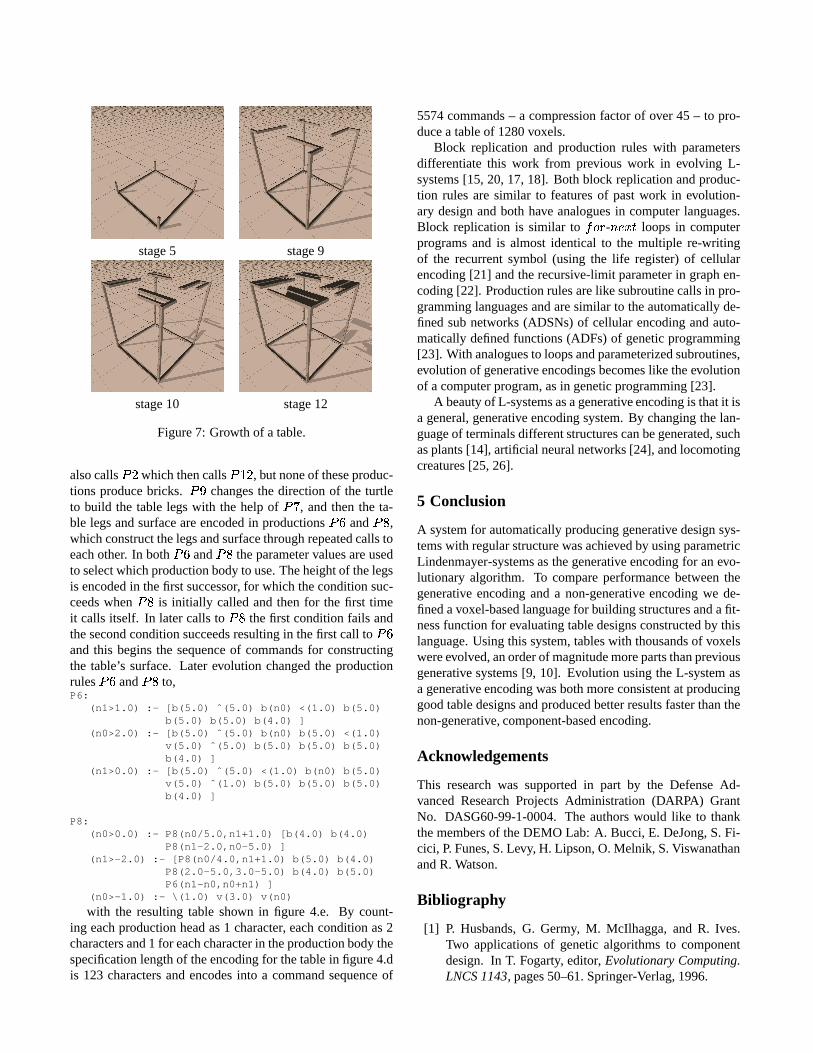
This L-systemis startedwith thecommandm �k �ukP �U@A.�UP ���
andgoesthrough17iterationsof parallelreplacement– struc-turescreatedby someof theseintermediatestagesareshownin figure7. Thefirst iterationproducesthestring, P11(1,2)v(1)
�P17(3,5)P18(14,14)P3(1,6)
�(4), which usesblock
replicationto encodethat the tablehasfour legs – reducingtheblock-replicationparameterto 3 resultsin a 3-leggedta-ble. Within this block, theproductions
m A�²,m A.³
andm s
arecalled once,and this is the only time they are called. Thestructureof thebaseis encodedin productions
m AB²and
m A.³.
Reducingthenumberof voxelscreatedfrom its�j]l�lr�]�T�VX *�
command,�� 2�
, in theseproductionsreducesthe width anddepthof the table.
m scalls
m AL´, but all of
m A.´’s condi-
tionsfail, andthissequenceof productionsproducesnobuildcommands.From
m A.³therearecallsto
m Authen
m �–m Au
stage5 stage9
stage10 stage12
Figure7: Growth of a table.
alsocallsm Q
whichthencallsm ALQ
, but noneof theseproduc-tions producebricks.
m �changesthe directionof the turtle
to build the tablelegs with the help ofm ²
, andthenthe ta-ble legsandsurfaceareencodedin productions
m ´and
m ³,
whichconstructthelegsandsurfacethroughrepeatedcallstoeachother. In both
m ´and
m ³theparametervaluesareused
to selectwhichproductionbodyto use.Theheightof thelegsis encodedin thefirst successor, for which theconditionsuc-ceedswhen
m ³is initially calledandthenfor the first time
it calls itself. In latercalls tom ³
thefirst conditionfails andthesecondconditionsucceedsresultingin thefirst call to
m ´andthis begins the sequenceof commandsfor constructingthe table’s surface. Later evolution changedthe productionrules
m ´and
m ³to,
P6:(n1>1.0) :- [b(5.0) ˆ(5.0) b(n0) <(1.0) b(5.0)
b(5.0) b(5.0) b(4.0) ](n0>2.0) :- [b(5.0) ˆ(5.0) b(n0) b(5.0) <(1.0)
v(5.0) ˆ(5.0) b(5.0) b(5.0) b(5.0)b(4.0) ]
(n1>0.0) :- [b(5.0) ˆ(5.0) <(1.0) b(n0) b(5.0)v(5.0) ˆ(1.0) b(5.0) b(5.0) b(5.0)b(4.0) ]
P8:(n0>0.0) :- P8(n0/5.0,n1+1.0) [b(4.0) b(4.0)
P8(n1-2.0,n0-5.0) ](n1>-2.0) :- [P8(n0/4.0,n1+1.0) b(5.0) b(4.0)
P8(2.0-5.0,3.0-5.0) b(4.0) b(5.0)P6(n1-n0,n0+n1) ]
(n0>-1.0) :- \(1.0) v(3.0) v(n0)
with the resultingtable shown in figure 4.e. By count-ing eachproductionheadas1 character, eachconditionas2charactersand1 for eachcharacterin theproductionbodythespecificationlengthof theencodingfor thetablein figure4.dis 123 charactersandencodesinto a commandsequenceof
5574commands– a compressionfactorof over 45 – to pro-ducea tableof 1280voxels.
Block replication and productionrules with parametersdifferentiatethis work from previous work in evolving L-systems[15, 20, 17, 18]. Both block replicationandproduc-tion rules aresimilar to featuresof pastwork in evolution-ary designandboth have analoguesin computerlanguages.Block replicationis similar to
qi�BT-�?_LµUY
loops in computerprogramsand is almost identical to the multiple re-writingof the recurrentsymbol (using the life register) of cellularencoding[21] andtherecursive-limit parameterin graphen-coding[22]. Productionrulesarelikesubroutinecallsin pro-gramminglanguagesandaresimilar to theautomaticallyde-fined subnetworks (ADSNs) of cellular encodingandauto-maticallydefinedfunctions(ADFs) of geneticprogramming[23]. With analoguesto loopsandparameterizedsubroutines,evolutionof generativeencodingsbecomeslike theevolutionof a computerprogram,asin geneticprogramming[23].
A beautyof L-systemsasagenerativeencodingis thatit isa general,generative encodingsystem.By changingthelan-guageof terminalsdifferentstructurescanbegenerated,suchasplants[14], artificial neuralnetworks[24], andlocomotingcreatures[25, 26].
5 Conclusion
A systemfor automaticallyproducinggenerativedesignsys-temswith regularstructurewasachievedby usingparametricLindenmayer-systemsasthegenerativeencodingfor anevo-lutionary algorithm. To compareperformancebetweenthegenerative encodingand a non-generative encodingwe de-finedavoxel-basedlanguagefor building structuresandafit-nessfunctionfor evaluatingtabledesignsconstructedby thislanguage.Usingthis system,tableswith thousandsof voxelswereevolved,anorderof magnitudemorepartsthanpreviousgenerative systems[9, 10]. Evolution usingtheL-systemasa generativeencodingwasbothmoreconsistentatproducinggoodtabledesignsandproducedbetterresultsfasterthanthenon-generative,component-basedencoding.
Acknowledgements
This researchwas supportedin part by the DefenseAd-vancedResearchProjectsAdministration (DARPA) GrantNo. DASG60-99-1-0004.The authorswould like to thankthemembersof theDEMO Lab: A. Bucci,E. DeJong,S.Fi-cici, P. Funes,S.Levy, H. Lipson,O.Melnik, S.ViswanathanandR. Watson.
Bibliography
[1] P. Husbands,G. Germy, M. McIlhagga, and R. Ives.Two applicationsof geneticalgorithmsto componentdesign. In T. Fogarty, editor, EvolutionaryComputing.LNCS1143, pages50–61.Springer-Verlag,1996.

[2] H. Lipson and J. B. Pollack. Automatic designandmanufactureof roboticlifeforms.Nature, 406:974–978,2000.
[3] P. J.Bentley, editor. EvolutionaryDesignbyComputers.MorganKaufman,1999.
[4] CouroKaneandMarc Schoenauer. Geneticoperatorsfor two-dimentionalshapeoptimization.In J.-M.Alliot,E. Lutton, E. Ronald,M. Schoenauer, and D. Snyers,editors,Artificiale Evolution - EA95. Springer-Verlag,1995.
[5] P. J.Bentley. GenericEvolutionaryDesignof SolidOb-jectsUsinga GeneticAlgorithm. PhDthesis,Universityof Huddersfield,1996.
[6] P. FunesandJ. Pollack. Computerevolution of build-ableobjects. In Phil HusbandsandInmanHarvey, edi-tors,Proceedingsof theFourthEuropeanConferenceonArtificial Life, pages358–367,Cambridge,MA, 1997.MIT Press.
[7] Marc Schoenauer. Shaperepresentationsandevolutionschemes.In L. J. Fogel, P. J. Angeline,andT. Back,editors,EvolutionaryProgramming5. MIT Press,1996.
[8] P. J. Bentley. Exploring component-basedrepresen-tations - the secretof creativity by evolution? InFourth InternationalConferenceon AdaptiveComput-ing in DesignandManufacture(ACDM 2000), 2000.
[9] HugodeGaris.Artificial embryology: Thegeneticpro-grammingof an artificial embryo. In Branko Soucekand the IRIS Group, editors, Dynamic, GeneticandChaoticProgramming. Wiley, 1992.
[10] P. Bentley andS.Kumar. Threewaystogrow designs:Acomparisonof embryogeniesof anevolutionarydesignproblem. In Banzhaf,Daida,Eiben,Garzon,Honavar,Jakiel, and Smith, editors, Geneticand EvolutionaryComputationConference, pages35–43,1999.
[11] Karl Sims. Evolving Virtual Creatures.In SIGGRAPH94ConferenceProceedings, AnnualConferenceSeries,pages15–22,1994.
[12] Frederic Gruau. Neural NetworkSynthesisUsing Cel-lular EncodingandtheGeneticAlgorithm. PhDthesis,EcoleNormaleSuperieuredeLyon,1994.
[13] A. Lindenmayer. Mathematicalmodelsfor cellular in-teractionin development.partsI andII. Journalof The-oreticalBiology, 18:280–299and300–315,1968.
[14] P. Prusinkiewicz andA. Lindenmayer. TheAlgorithmicBeautyof Plants. Springer-Verlag,1990.
[15] C. Jacob. GeneticL-systemProgramming.In Y. Davi-dor andP. Schwefel,editors,Parallel ProblemSolvingfrom Nature III, Lecture Notesin ComputerScience,volume866,pages334–343,1994.
[16] C. TraxlerandM. Gervautz. Using geneticalgorithmsto improvethevisualquality of fractalplantsgeneratedwith csg-pl-systems.In Proc.FourthInternationalCon-ferencein Central Europeon ComputerGraphicsandVisualization96, 1996.
[17] G. Ochoa.On geneticalgorithmsandlindenmayersys-tems. In A. Eiben,T. Baeck,M. Schoenauer, andH. P.Schwefel,editors,Parallel ProblemSolvingfrom Na-tureV, pages335–344.Springer-Verlag,1998.
[18] P. Coates,T. Broughton, and H. Jackson. Explor-ing three-dimensionaldesignworldsusinglindenmayersystemsandgeneticprogramming.In P. J.Bentley, edi-tor, EvolutionaryDesignby Computers, 1999.
[19] CarlosM. FonsecaandPeterJ.Fleming.An overview ofevolutionaryalgorithmsin multiobjectiveoptimization.EvolutionaryComputation, 3(1):1–16,1995.
[20] C. TraxlerandM. Gervautz. Using geneticalgorithmsto improvethevisualquality of fractalplantsgeneratedwith csg-pl-systems.In Proc.Fourth Intl. Conf. in Cen-tral Europe on ComputerGraphicsand Visualization96, 1996.
[21] Frederic GruauandKameelQuatramaran.Cellularen-codingfor interactive evolutionaryrobotics. TechnicalReport425,Universityof Sussex, 1996.
[22] Karl Sims. Evolving 3d morphology and behaviorby competition. In R. Brooks and P. Maes, editors,Proceedingsof the Fourth Workshopon Artificial Life,pages28–39,Boston,MA, 1994.MIT Press.
[23] J.R. Koza.GeneticProgramming:ontheprogrammingof computersbymeansof natural selection. MIT Press,Cambridge,Mass.,1992.
[24] H. Kitano. Designingneuralnetworksusinggenetical-gorithmswith graphgenerationsystem. Complex Sys-tems, 4:461–476,1990.
[25] G.S.Hornby, H. Lipson,andJ.B. Pollack.Evolutionofgenerative designsystemsfor modularphysicalrobots.In Intl. Conf. on RoboticsandAutomation, 2001.
[26] G.S.HornbyandJ.B. Pollack.Body-braincoevolutionusing l-systemsas a generative encoding. In GeneticandEvolutionaryComputationConference, 2001.