the memphis precision runway monitor program … memphis precision runway monitor program instrument...
TRANSCRIPT

Lincoln LaboratoryMASSACHUSETTS INSTITUTE OF TECHNOLOGY
LEXINGTON, MASSACHUSETTS
DOT/FAA/NR-92/11
Project ReportATC-194
The Memphis Precision Runway Monitor Program Instrument Landing System
Final Approach Study
M.R. Owen
24 May 1993
Prepared for the Federal Aviation Administration,
Washington, D.C. 20591
This document is available to the public through the National Technical Information Service,
Springfield, VA 22161

This document is disseminated under the sponsorship of the Federal Aviation Administration, Department of Transportation, in the interest of information
exchange. The U.S. Government assumes no liability for its contents or use thereof.

TECHNICAL REPORT STANDARD TITLE PAGE
1. Report No. ATC-194
2. Government Accession No. 3. Recipient‘s Catalog No. DOT/FAA/NR-92/11
7. Author@) Martha Rehbein Owen
4. Title and Subtitle The Memphis Precision Runway Monitor Program Instrument Landing System Final Approach Study
8. Performing Organization Report No.
ATC-194
5. Report Date
6. Performing Organization Code 24 May 1993
~ ~~
9. Performing Organization Name and Address I 10. Work Unit No. (TRAIS)
Lincoln Laboratory, MIT P.O. Box 73 Lexington, MA 02173-9108
12. Sponsoring Agency Name and Address Department of Transportation Federal Aviation Administration Systems Research and Development Service Washington, DC 20591
~ ~ ~~
11. Contract or Grant No. . DTFA-01-93-Z-02012
13. Type of Report and Period Covered
Project Report
14. Sponsoring Agency Code
15. Supplementary Notes
This report is based on studies performed at Lincoln Laboratory, a center for research operated by Massachusetts Institute of Technology. The work was sponsored by the Department of the Air Force under Contract F19628-90-C-0002.
16. Abstract
This report documents the study of the lateral positions of aircraft on Instrument Landing system (ILS) approaches during the Memphis, Tennessee, Precision Runway Monitor (PRM) demonstration. The PRM is an advanced radar monitoring system that improved the arrival capacity of closely spaced parallel runways in poor weather conditions. The results of this study are used to assist in determining the minimum runway spacing that will be authorized for PRM.
The objective of this study was to quantify the lateral character of ILS arrivals and the consequent impact on independent simultaneous ILS arrival to closely spaced parallel runways. The sensitivity of the arriving aircrafts’ lateral positions to different variables such as visibility, wind runway, aircraft type, autopilot performance, and localizer beam width was determined. Also, the Memphis arrival data were compared to FAA Technical Center Chicago O’Hare ap- proach data. The analysis was primarily based on surveillance reports of 4,000 ILS arrivais into Memphis International Airport, coUected with the PRM AMPS sensor (ATCRBS Monopulse Processing System).
A major result of the study was that lateral aircraft positions wi l l not hamper independent arrivals to parallel runways spaced 3,400 feet apart, but will impede operations at 3,000 feet or smaller unless approach modifications are intro- duced. Lateral deviations were found to be most sensitive to reduced visibility and certain autopilots. Lateral deviations were also found to be somewhat more at Memphis relative to Chicago O’Hare. Recommendations for further data analysis and collection are discussed.
17. Key Words 18. Distribution Statement

EXECUTIVE SUMMARY
This report documents the study of the lateral positions of aircraft on Instrument Landing System (ILS) approaches during the Memphis, Tennessee, Precision Runway Monitor (PRM) demonstration. The PRM is an advanced radar monitoring system that improves the amval capacity to closely-spaced parallel runways in poor weather conditions. The results of this study are to assist in determining the minimum runway spacing that will be used for PRM.
BACKGROUND
The growth in air traffic has brought with it a steady increase in the number and duration of flight delays. To address the delays, the Federal Aviation Administration (FAA) is working to increase the current airport system capacity. Numerous approaches are under investigation including improvements to Air Traffic Control procedures, microwave landing systems, additional taxiways, additional runways and even airports, and application of new technology.
The Precision Runway Monitor (PRM) program is one of the new technology initiatives of the FAA. The PRM is an advanced radar monitoring system that improves the amval capacity to parallel runways in poor weather conditions. The airports that would benefit are the ones with closely-spaced parallel runways separated by less than 4,300 feet. Currently at these airports, when the weather is sufficiently clear, aircraft amving to parallel runways can use the two approaches independent from each other. Once the cloud ceiling drops and/or the visibility to the runway reduces past defined levels (instrument meteorological conditions, IMC), the two streams of traffic must become dependent on each other and stagger their approaches with prescribed spacings. At the Memphis International Airport, this reduces the amval rate from 55 to 45 aircraft an hour. The PRM system would avoid these delays by making it possible to safely conduct independent arrivals in IMC to closely-spaced parallel runways. 2
The principle objective of the MIT Lincoln Laboratory PRM Demonstration Program was to determine the runway spacings for which the PRM system could safely support independent instrument landing system approaches. To assist in this determination, the nature of the lateral deviations of aircraft on final approach needed to be characterized. When independent ILS arrivals are in effect, there is a 2,000-foot no transgression zone (NTZ) centered between the approach courses. The monitoring air traffic controllers ensure that this area remains clear of aircraft. If too many of the normal, lateral deviations of the approaching aircraft overlap with the NTZ, independent ILS operations would be impractical. This is because the monitor controllers would have to interrupt the normal final approach operations when there was an NTZ penetration in order to ensure safety. The interruptions would reduce or eliminate the benefits of the independent ILS operations.
The Instrument Landing System (ILS) is the most precise procedure in common use to safely guide appropriately equipped aircraft to the runway during IMC. ILS works by radio-navigation signals identifying a precise flight path, laterally with the localizer and vertically with the glide slope.
LaFrey, R.R., “Parallel Runway Monitor.” The Lincoln Laboratory Journal, Fall 1989, MIT Lincoln Laboratory, Lexington, MA, Vol. 2, Number 3. pp. 411-436.
Federal Aviation Administration, “Precision Runway Monitor Demonstration Report.” DOT/FAA/RD-9 1-5.
iii

The signals are displayed to the flight crew on an instrument (course deviation indicator, CDI) that indicates the location of the flight path relative to the current aircraft position.
The lateral deviations of aircraft on final approach studied in this report include the e m r of keeping the aircraft aligned with the ILS localizer beam. The measured deviations from the centerline of the approach also include the errors in the CDI itself, the ILS radio signal, and the radar that gathered the data. The combination of the lateral alignment e m f and the other errors is called the total navigational system error (TNSE).
The lateral final approach deviations have been studied in the past. This report goes beyond the earlier efforts by considering greater numbers of arrivals and including a larger group of variables.
SCOPE
This report characterizes the lateral component of the ILS final approach trajectories to the Memphis parallel runways during the PRM demonstration program. The impact of the approach distributions on an "I'Z was assessed, should there be independent anivals. The characterization was furthered by extensive study of the sensitivity of final approach lateral deviations to different variables. The results are based on data collected during 1989 - 1991.
METHODS AND DATA COLLECTION
The Memphis PRM data collection system was an integral part of the PRM demonstration. The equipment and software involved consisted of AMPS (ATCRBS Monopulse Processing System), an ARTS interface, experimental air-traffic control displays, automated blunder detection alarms, a weather data acquisition and recording system, and an audio recording of VHF communications.
While aircraft surveillance reports from the AMPS sensor were being recorded, current weather conditions from a dial-up weather service and from laser ceilometers located at two outer markers were recorded onto the same computer tape. The site personnel monitored the radio to receive Automated Terminal Information Service (ATIS) reports and also the tower announcements. This information, as well as system parameters and notable events during PRM operations, were written in a site logbook.
The Memphis PRM data collection effort was very successful in that over 7,000 final approaches were recorded. This success required that the data analysis also include reliable and flexible management of the data which was met with a relational database management system (RDMS). An important contribution to the analysis of the recorded Memphis approaches was a summary table in the relational database. This summary of all the data allowed for queries to create subsets of the data, to easily count number of arrivals in different subsets, and to label each approach with the assigned weather category. In addition, it simplified the process of combining database tables. The information contained in the summary table was the data collection period, the airline, flight number, aircraft type, runway, time that the track started and stopped, assigned weather category, and the time that the aircraft flew over the outer marker.
One of the last steps in preparing the final approach data for analysis was to sort the final approach track reports into discrete areas. Sorting the data into discrete bins simplified combining the many aircraft tracks used to study the population characteristics of the TNSE. The bins were
I
N ,

0.2nmi in range by 20 feet in centerline deviation within a grid system that covered the final approach region of 20 nmi by f5,000 feet.
Different groups of arrivals were compared using their means and standard deviations across each range bin. The 95% confidence limits on the standard deviations were used to determine significant differences. The means and standard deviations of the lateral deviations were calculated for all of the range bins from about 1.0 to 15 nmi. This moderated the effects of data in single range bins.
The final approaches to the Memphis parallel runways were considered as a representative sample of the whole population of amvals and were studied as a group. The approaches were not studied individually.
Final approach data into Memphis International Airport were collected from January 11, 1989, to November 15, 1989, and July 12, 1990, to March 1, 1991. In the first time span there were 162 data collection periods that recorded 7,333 arrivals to the parallel runways. The second time span was to collect final approach data while two of the four ILS localizer beams were narrowed. There were 16 data collection periods for this subset of data with 803 approaches.
The final approaches in the first collection effort were recorded in all weather conditions. The distribution of the collected data across different weather categories was 26.7% in Instrument Flight Rules (WR) conditions, 30.1% in Marginal Visual Flight Rules (MVFR) conditions, and 42.2% in Visual Flight Rules (WR) conditions. The IFR and MVFR conditions approach data were studied for this report, while the VFR conditions data were not.
RESULTS
The major results of the PRM study of the total navigational system error (TNSE) during final approaches into Memphis International include a characterization of the general pattern of approaches, its impact on NTZ penetrations, and the effect of different variables - weather, aircraft type, and airport. Three comparisons, where significantly smaller TNSEs were found, were between the arrivals in IFR and MVFR weather conditions, between B727 and B757 arrivals, and between Memphis and Chicago approaches. A summary of the results of the analysis follows.
The general character of lateral deviations for the population of approaches approximates a normal distribution with some extra central peakedness and slightly thicker tails. Close to the runway thresholds, the distribution has a standard deviation of less than 70 feet. The spread increases nearly linearly so that by 10 nmi away from the runway, the standard deviation is around 350 feet. Figure A shows the distribution of two parallel final approach streams. The vertical dimension is the frequency of aircraft found at that lateral position.
V

Figure A. Distribution of arrivals to dual runways.
Once it was determined how the Memphis amvals were distributed, their impact on an NTZ could be accessed, if the arrivals were independent approaches. In addition, the Memphis approaches were extrapolated to other runway spacings (2,600, 3,000 and 4,300 feet) to predict the effect of regular independent arrivals to those runway separations.
Figure B shows the resultant curves of the percentage of aircraft that are projected to be found in the NTZ as a function of range from the runway threshold. For example, consider aircraft 9 nmi from the runway threshold (this would be shortly after altitude separation is lost between adjacent aircraft). If the Memphis runways were 4,300 feet apart, essentially zero aircraft would be in the NTZ. At the real runway separation, 3,400 feet, 3.5% of the arrivals are in the NTZ. If the runways were 3,000 feet apart, 8% of the arrivals intrude into the NTZ. And if the runways were 2,600 feet apart, 20% of the approaches would be found in the NTZ at 9 nmi.
McLaughlin, Francis X., “Navigational Accuracy Demonstrated with the Instrument Landing System.” Franklin Institute Laboratories for Research and Development, FAA Contract F M R D - 1 4 . June 1959.
vi

35
30
25
20
15
10
5
0 0 .0 5.0 10.0
Range (nmi) 15.0
Figure B. The percentage @aircraft projected to be in an m a t 4 direrent runway spacings as a function of range from the runway threshold.
The approach data were further analyzed, by subgroup, to identify the significant characteristics of the lateral deviations of aircraft on final approach. The variables examined were runway, weather, aircraft type, autopilot usage and localizer width. By examining subcategories of data, the sensitivities of the TNSE to each variable were identified.
The first variable studied was the specific runways and it was found that each runway had its own pattern of amvals. The differences were mostly in the mean lateral positions. There was not a significant difference in the standard deviations of the arrivals.
The weather conditions had a more significant effect on the amvals when comparing the difference of the lateral deviations during approaches in MVFR and IFR weather conditions. Although statistically significant, this still means only a 175-foot difference in the total lateral spread of the amvals at 10 nmi. When the crosswinds were high (>11 knots), the data suggests that the approaches had more lateral scatter than with calm conditions. Finally, when comparing low IFR to high IFR arrivals, the low JFR arrivals flew more tightly.
There were many permutations in the comparisons of the TNSE of different aircraft and aircraft groups. The weight classes did not show differences in TNSE. Neither did the general aviation amvals show significant differences. The DEI, B727, SF34, and BA14 amvals were compared and only the BA14 approaches demonstrated a different TNSE, having an increased standard deviation between 3 and 10 m i . The B727 and B757 amvals were compared to each other, assuming that they represented one manufacturer's different generation autopilot systems. The B757 had significantly smaller TNSEs than the B727; the standard deviations differed by 70 feet between 5 and 9 mi. However, this difference was not apparent when all aircraft were divided into two
VU

generations (old and new) and compared. Also, there was no significant difference in the TNSE when aircraft that were hand-flown were compared to aircraft known to be using B727 generation autopilots.
One other variable studied in Memphis was the effect of the localizer beam width. In a controlled study, the approaches to two runways had localizer beam widths of 3.0 degrees and the other two localizers were set at 4.0 degrees. There was no significant difference in the TNSEs of these two sets of approaches. There was a small narrowing of the TNSE spread in the 3.0-degree approaches when they were compared to approaches to those two runways from before the beam was narrowed (from 4.3 degrees).
The data from Memphis were compared to the approaches recorded by the FAA Technical Center into Chicago OHare Airport. Inside of 6 nmi, the two groups of arrivals behaved similarly as compared by their means and standard deviations as a function of range. Between 6 and 11 nmi the approaches into Chicago had a significantly smaller spread than the Memphis approaches. The standard deviations differed by 50 feet between 6 and 11 m i . The mix of aircraft differs between Chicago and Memphis, which may contribute to the difference though this is not well supported by the Memphis studies. The major difference in the arrivals is that the Memphis approaches were dependent and the Chicago amvals were independent, but data does not exist that explicitly quantifies this effect.
CONCLUSIONS AND RECOMMENDATIONS
i
This report concludes that independent simultaneous arrivals to parallel runway closer than 3,400 feet apart will have significant numbers of aircraft entering the NTZ during their typical approaches. Of the variables studied (e.g., narrowing the localizer beam to its minimum), none would change this outcome.
There are two categories of recommendations for further work in this subject: 1) further analysis on the Memphis PRM data , and 2) more data collection. In the area of more study on this report's data, it is recommended that the overshoots on ILS acquisition be studied. It is likely that the intercept angle and range at ILS localizer acquisition affect the TNSE as well as the size of the localizer overshoots. It is also recommended that individual tracks be characterized for simulation purposes in risk analyses.
.-
Regarding more data collection, it is recommended that the FAA continue gathering TNSE data at periodic intervals at a number of airports in order to track change and understand differences and trends. As this report shows, evolving aircraft distributions and different airports affect the TNSE. If independent amvals are conducted at 4,300 feet or less, it is recommended that data be collected to compare to the dependent arrivals at Memphis. Also, it is recommended that additional data be collected on ILS amvals beyond 12 nmi. (In this regard, the FAA has begun a study in Los Angeles, California.)
, ;
viii

ACKNOWLEDGMENTS
Thanks is given to the members of Group 42, MIT Lincoln Laboratory who worked on all aspects of this endeavor, with special thanks to:
Raymond R. LaFrey, Group Leader
Eric M. Shank, PRM Project Leader
Dave G. Walz for considerable work with the data management
Mike J. Hoffman for programming the analysis software
Kate deM. Hollister and Woon Yao for programming support, and
Erick L. White and John J. ORourke at the Memphis PRM site for the excellent data collection effort
ix
I

T

TABLE OF CONTENTS
. . .
... Executive Summary .............................................................................................................. 111
Acknowledgments ................................................................................................................ ix List of Figures ................................................................................................................... .xm ...
.. List of Tables ..................................................................................................................... xvil
1 . INTRODUCI'ION .................................................................................................................. 1
Scope of this Re port ...................................................................................................... 2 Organization of this Report ........................................................................................... 2
2 . METHODS ............................................................................................................................ 3
1.1 1.2 . .
2.1 Data Collection .............................................................................................................. Digital Data Collection System .......................................................................... 7 2.1.1.1 Mode S Sensor and AMPS Surveillance ............................................. 8 2.1.1.2 ARTS Interface .................................................................................. 8 2.1.1.3 PRM Computer System Software ....................................................... 8 2.1.1.4 Aviation Weather Data Acquisition ..................................................... 8
2.1.2 Audio Data Recording System .......................................................................... 9 2.1.3 PRM Site Logbook ........................................................................................... 9
2.2 Data Analysis .............................................................................................................. 10 2.2.1 Analysis Hardware .......................................................................................... 10 2.2.2 Data Management ........................................................................................... 10
2.2.2.1 Relational Database Management System ......................................... 10 2.2.2.2 Data Entry ....................................................................................... 12
2.2.3.1 2.2.3.2
2.1.1
2.2.3 Analysis Software ........................................................................................... 1 3 PRM Approach Table ...................................................................... 1 4 Preparation and Analysis ................................................................. 1 5
3 . ANALYSIS AND RESULTS ................................................................................................ 2 3
3.1 Data Composition ....................................................................................................... 23 3.2 General Character of the Memphis Final Approaches .................................................. 26 3.3 Effect of TNSE on NTZ Penetration ........................................................................... 29
xi

TABLE OF CONTENTS (continued)
3.4 Memphis Data Subgroup Analyses ............................................................................. 33 3.4.1 Each of the Parallel Runways .......................................................................... 33 3.4.2 TNSE in Different Weather Conditions ........................................................... 36
3.4.2.1 Low IFR Amvals Compared to High IFR Arrivals ............................ 36 3.4.2.2 MVFR Weather Conditions vs IFR .................................................... 39 3.4.2.3 Crosswinds ....................................................................................... 41
3.4.3 Aircraft Types ................................................................................................ 43 3.4.3.1 Aircraft Weight Classes .................................................................... 43 3.4.3.2 General Aviation .............................................................................. 46 3.4.3.3 DC9. B727. SF34. BA14 .................................................................. 48 3.4.3.4 3.4.3.5 Age of Aircraft ................................................................................ 53
3.4.4 Autopilot Performance ................................................................................... 56 3.4.5 Narrowed Localizer Beam Experiment ............................................................ 59 Comparing the Chicago and Memphis Amvals ........................................................... 67 3.5.1 Localizer Acquisition Filter Approximation .................................................... 68 3.5.2 Adaptation of FAATC Filter to Memphis Data ................................................ 69 3.5.3 Statistical Comparison ..................................................................................... 70
Comparing the TNSE of B727 and B757 ......................................... 51
3.5
4 . CONCLUSIONS .................................................................................................................. 75
5 . RECOMMENDATIONS ...................................................................................................... 77
APPENDIX A ............................................................................................................................... 79
APPENDIX B ............................................................................................................................... 83
4
APPENDIX C ............................................................................................................................... 97
APPENDIX D ............................................................................................................................... 99
REFERENCES ............................................................................................................................ 101
GLOSSARY ................................................................................................................................ 103
xii

LIST OF FIGURES
ElmLm 2- 1 2-2 2-3 2-4 2-5 2-6
2-7(a-b)
2-7(~) 2-8 3- 1
3-2 3-3 3-4
3-5
3-6
3-7
3-8
3-9
3- 10
3-1 1
3-12
3-13
3- 14
3- 15
3-16
. MlT Lincoln Laboratory PRM location at Memphis International Airport ................. 3 MlT Lincoln Laboratory PRM sensor at the Memphis International Airpo rL ............. 5 Flow diagram of Memphis PRM data collection system .............................................. 7 A sample PRM site logbook page ............................................................................ 11 Illustrating the limits of the weather categories used in the data analysis ................... 15 Example of an aircraft radar track transformed to a runway Cartesian coordinate frame . The overlaid symbols show the portion defined to be stabilized on the localizer beam ............................................................................... 17 The effect of the range filter on the number of amvals and the mean centerline deviation .................................................................................................................. 18 The effect of the range filter on the standard deviation about the mean .................... 19 Example of the quantized flight data pooled together (density plot) ........................ 21 The types.of aircraft and their proportion of the arrivals in IFR and MVFR weather conditions ................................................................................................... 24 The distribution of airlines contributing to the Memphis PRM data. ......................... 26
Distribution of ILS amvals into Memphis in IMC (36L/R and 18LB
The distribution of approaches in IMC to Memphis 36L and 36R (303 and 320 arrivals. respectively) . A hypothetical NTZ is indicated ........................................... 29 Distribution of IMC approaches to MEM 18R showing the overlap of some arrivals into an NTZ ................................................................................................. 30 Cross section of the final approach density at 9 nmi . The solid area indicates the approaches inside the NTZ ................................................................................. 31 The percentage of Memphis final approaches in an NTZ as a function of range from the runway threshold ....................................................................................... 32 The percentage of aircraft projected to be in an NTZ at 4 different runway spacings as a function of range from the runway threshold ...................................... 32 The mean centerline deviation of the arrivals to Memphis 36LB and 18L/R in MVFR weather conditions ........................................................................................ 34 The number of arrivals to Memphis 36L/R and 18L/R in MVFR weather conditions ................................................................................................................ 35 The standard deviation of the centerline deviations of the arrivals to Memphis 36L/R and 18L/R in MVFR weather conditions ........................................................ 35 The number of aircraft over 12. 500 lbs approaching in high IFR and low IFR weather conditions ................................................................................................... 37 The mean centerline deviation of approaches in high lF'R and low IFR weather conditions ................................................................................................................ 37 The standard deviation of the aircraft lateral positions in high IFR and .10~ IFR weather conditions ................................................................................................... 38 The 95% confidence intervals on the standard deviations of the high IFR and low IFR condition amvals ........................................................................................ 38
Distribution of arrivals to dual runways .................................................................... 27
combined) ............................................................................................................... 28

3-17
3-18
3-19
3-20 3-2 1 3-22 3-23
3-24 3-25 3-26
3-27 3-28
3-29
3-30
3-3 1
3-32
3-33 3-34
3-35 3-36 3-37 3-38 3-39 3-40 3-4 1 3-42
3-43
3-44
3-45
LIST OF FIGURES (continued)
The number of aircraft over 12. 500 lbs . arriving in Memphis in IFR and MVFR weather conditions. stabilized by 9.4 mi ................................................................. 39 The mean lateral position of the approaches in IFR and MVFR weather conditions ................................................................................................................ 40 The standard deviation of the lateral positions of the IFR and MVFR weather arrivals ..................................................................................................................... 40 The 95% confidence intervals on the IFR and MVFR standard deviations ................ 41 The number of amvals during heavy crosswinds. stabilized by 9.4 m i .................... 42 Comparing the mean centerline deviations of crosswind to calm conditions ............. 42 Comparing the standard deviation of the centerline positions of crosswind to calm conditions ....................................................................................................... 43
The mean centerline deviations of the Memphis approaches by weight class ............ 45 Comparing the standard deviations of the lateral positions of the arrivals
The number of amvals categorized by aircraft weight class ...................................... 44
grouped by aircraft weight class ............................................................................... 45 The number of General Aviation amvals to the parallel runways .............................. 46 Comparing the mean lateral position of General Aviation amvals to approaches by heavy and large aircraft ...................................................................................... 47 Comparing the standard deviations of General Aviation approaches to heavy and large aircraft. (IFR and MVFR weather conditions) .......................................... 47 The 95% confidence limits on the standard deviations of General Aviation aircraft and heavy and large aircraft in IFR and MVFR weather conditions .............. 48 The number of DC9; B727. SF34. and BA14 aircraft that arrived during IFR and MVFR weather conditions ................................................................................. 49 Comparing the mean centerline positions of the four primary aircraft in the Memphis data .......................................................................................................... 49 Comparing the standard deviations of the four primary aircraft ............................... 50 Comparing the 95% confidence limits of the standard deviations of the four aircraft types . Notice the larger values of the BA14 aircraft ..................................... 50 The number of amvals in Memphis of B727 and B757 aircraft ............................... 51 Comparing the mean lateral positions of the B727 and B757 approaches ................. 52 Comparing the standard deviations of the B727 and B757 arrivals ........................... 52 Comparing the B727 and B757 95% standard deviation's confidence limits ............. 53 The number of amvals in the older and newer generation aircraft data set ............... 54 Comparing the mean lateral position of the newer and older generation aircraft ....... 55
The 95% confidence limits on the standard deviation of the older and newer aircraft in the Memphis PRM data ............................................................................ 56 The number of arrivals in the autopilot-coupled versus hand-flown approaches experiment .............................................................................................................. 57 The mean centerline deviation of the autopilot-coupled and hand-flown approaches .............................................................................................................. 5 8 The standard deviation of the centerline deviation of the autopilot-coupled and hand-flown approaches ............................................................................................ 5 8
The standard deviation of the newer and older aircraft TNSE in Memphis ............... 5 5
xiv

LIST OF FIGURES (continued)
..
3-46
3-47
3-48 3-49 3-50 3-5 1
3-52
3-53
3-54
3-55
3-56
3-57
3-58
3-59
3-60
3-61
3-62 B- 1
B-2a
B-2b
B-3
B-4
B-5
B-6
The 95% upper and lower confidence limits on the standard deviation of the
Diagram of the localizer beam widths on the Memphis parallel runways for the autopilot-coupled and hand-flown approaches ......................................................... 59
namwed localizer experiment ................................................................................. 60 The number of arrivals in the namwed localizer beam width experiment ................ 61 The number of arrivals in the namwed localizer experiment ................................... 62 The number of arrivals and corresponding coasts to 18L ......................................... 62 The mean TNSE centerline deviation as a function of range for the narrowed localizer approaches and their control .................................................. : ................... 63 The standard deviation of the TNSE centerline deviation as a function of range for the narrowed localizer approaches and their control ........................................... 64 The 95% confidence intervals for the standard deviation of the narrowed localizer beam amvals and their control ................................................................... 64 Comparing the number amvals to Memphis 36R and 18L when the localizer beam width was 3.0 degrees and 4.3 degrees ............................................................ 65 Showing the different mean lateral positions of the Memphis amvals when the localizer beam width was 3.0 degrees and 4.3 degrees .............................................. 66 Comparing the standard deviations of the amvals to 3.0-degree and 4.3-degree localizers ................................................................................................................. 66 The 95% confidence limits on the standard deviation of the 3.0-degree and 4.3-degree amvals ................................................................................................... 67 Comparing the MIT Lincoln Laboratory and FAATC localizer stabilization filters on the Memphis IFR weather conditions, heavy and large aircraft data ........... 69 The number of amvals in each of the Chicago FAATC and Memphis Lincoln Laboratory data sets ................................................................................................. 70 Comparing the mean centerline deviation of the approaches to Memphis and Chicago ................................................................................................................... 71 Comparing the standard deviation about the mean centerline position in the Memphis and Chicago arrivals ................................................................................. 71 Chicago OHare data collection aircraft distribution ................................................. 73 Memphis IFR approaches centerline deviations at 2 m i plotted on a normal probability. plot ........................................................................................................ 84 Memphis IFR approach centerline deviations at 5 nmi plotted on a normal probability plot ........................................................................................................ 84 Memphis IFR approach centerline deviations at 5 nmi plotted on a normal probability plot with the data beyond k370 feet from the mean removed ................. 85 Memphis IFR approach centerline deviations at 10 'nmi plotted on a normal probability plot ........................................................................................................ 85 The normal probability plots of the lateral positions of the Memphis approaches in MVFR weather conditions .................................................................................... 87 The lateral deviations of Memphis IMC amvals to 36L of aircraft over 12. 500 lbs . plotted on a nonlinear probability scale ............................................................. 89 The lateral deviations of Memphis IMC amvals to 36R of aircraft over 12. 500 lbs . plotted on a nonlinear probability scale ............................................................. 90
xv
LIST OF FIGURES (continued)
B-7
B-8
B-9
B-10
B-11
B-12
D- 1
D-2
The lateral deviations of Memphis IMC amvals to 18L of aircraft over 12,500 lbs. plotted on a nonlinear probability scale ............................................................. 91 The lateral deviations of Memphis IMC arrivals to 18R of aircraft over 12,500 lbs. plotted on a nonlinear probability scale ............................................................. 92 The lateral distribution of the Chicago amvals at 2.1 nmi compared to a gaussian curve with the same mean and standard deviation ....................................... 93 The lateral distribution of the Chicago amvals at 5.1 nmi compared to a gaussian curve with the same mean and standard deviation ....................................... 94 The lateral distribution of the Chicago arrivals at 10.2 nmi compared to a gaussian curve with the same mean and standard deviation ....................................... 95 The lateral distribution of the Chicago arrivals at 14.85 m i compared to a gaussian curve with the same mean and standard deviation ....................................... 96 The lateral distribution of the Memphis IMC arrivals of heavy and large aircraft at 2.2 - 2.4 nmi with a normal curve overlay ............................................ 100 The lateral distribution of the Memphis IMC arrivals of heavy and large aircraft at 4.2 - 4.4 nmi with a normal curve overlay ............................................ 100
xvi

Table No. 2- 1 3- 1 3-2 3-3
3-4 3-5 3-6 3-7 3-8 D- 1
3
LIST OF TABLES
EWi Data Collection Weather Categories ........................................................................... 14 Distribution of Recorded Amvals Among the Weather Conditions and Runways ...... 23 Distribution of Amvals After Localizer Stabilization by 9.4-nmi Filters ................... 24 The Types of Aircraft and Their Proportion of the Amvals in IFR and MVFR Weather Conditions ................................................................................................... 25
Distribution of Memphis Amvals to Compare Newer and Older Aircraft ................. 54 Weather for Chicago OHare Amvals Data Collection ............................................... 68 Chicago OHare Localizer Beam Widths ................................................................... 72
Comparing the ICAO Collision Risk Model (CAT I) to the PRM Approaches .......... 99
Data Analysis Weather Categories ............................................................................ 36
Distribution of Newer and Older Aircraft in Memphis and Chicago Data ................. 74
a
xvii


1. INTRODUCTION
.
The growth in air traffic has brought with it a steady increase in the number and duration of flight delays. To address the delays, the Federal Aviation Administration (FAA) is working to increase the current airport system capacity. Numerous approaches are under investigation including improvements to Air Traffic Control procedures, microwave landing systems, additional taxiways, additional runways and even airports, and application of new technology.
The Precision Runway Monitor (PRM) program is one of the new technology initiatives of the FAA. The PRM is an advanced radar monitoring system that improves the amval capacity to parallel runways in poor weather conditions. The airports that would benefit are the ones with closely-spaced parallel runways separated by less than 4,300 feet. Currently at these airports, when the weather is sufficiently clear, aircraft arriving to parallel runways can use the two approaches independent from each other. Once the cloud ceiling drops and/or the visibility to the runway reduces past defined levels (instrument meteorological conditions, IMC), the two streams of traffic must become dependent on each other and stagger their approaches with prescribed spacings. At the Memphis International Airport, this reduces the amval rate from 55 to 45 aircraft an hour [I]. The PRM system would avoid these delays by making it possible to safely conduct independent amvals in IMC to closely-spaced parallel runways [2].
The principle objective of the MIT Lincoln Laboratory PRM Demonstration Program was to determine the runway spacings for which the PRM system could safely support independent instrument landing system (ILS) approaches. To assist in this determination, the nature of the lateral deviations of aircraft on final approach needed to be characterized. When independent ILS amvals are in effect, there is a 2,000-foot no transgression zone (NTZ) centered between the approach courses. The monitoring air traffic controllers ensure that this area remains clear of aircraft. If too many of the normal, lateral deviations of the approaching aircraft overlap with the NTZ, independent ILS operations would be impractical. This is because the monitor controllers would have to intenupt the normal final approach operations when there was an NTZ penetration in order to ensure safety. The interruptions would reduce or eliminate the benefits of the independent ILS operations.
The Instrument Landing System (ILS) is the most precise procedure in common use to safely guide appropriately equipped aircraft to the runway during IMC. ILS works by radio-navigation signals identifying a precise flight path, laterally with the localizer and vertically with the glide slope. The signals are displayed to the flight crew on an instrument (course deviation indicator (CDI)) that indicates the location of the flight path relative to the current aircraft position.
The lateral deviations of aircraft on final approach studied in this report include the e m r of keeping the aircraft aligned with the ILS localizer beam. The measured deviations from the centerline of the approach also include the errors in the CDI itself, the ILS radio signal, and the radar that gathered the data. The combination of the lateral alignment e m r and the other errors is called the total navigational system error (TNSE).
The lateral final approach deviations have been studied in the past [3, 41. This report goes beyond the earlier efforts by considering greater numbers of amvals and including a larger group of variables.
1

1.1 SCOPE OF THIS REPORT
This report characterizes the lateral component of the ILS final approach trajectories to the Memphis parallel runways during the PRM demonstration program. The impact of the approach distributions on an NTZ was assessed, should there be independent amvals. The characterization was furthered by extensive study of the sensitivity of final approach lateral deviations to different variables. The results are based on data collected during 1989 to 1991.
1.2 ORGANIZATION OF THIS REPORT
This report is organized in the sequential manner in which the project was carried out. Section 2 includes a brief description of the data collection subsystem of the PRM Memphis demonstration site. Next is a description of the computer hardware and software that was used to manage the large amounts of data gathered in Memphis. Section 2 ends with a discussion of the data analysis software.
Section 3 reports on the analysis and results of the study of lateral deviations of the aircraft on final approach. A summary is presented of the data collected and used for analysis. The character of the population of ILS approaches is discussed. The effect of this character on NTZ penetrations is presented, followed by a comparison of the statistics of many variables. Section 3 concludes with a comparison of the Memphis and Chicago TNSE. Finally, Sections 4 and 5 present the conclusions and the recommendations for further study, respectively.
2

2. METHODS
The MI" Lincoln Laboratory Precision Runway Monitor was demonstrated at the Memphis International Airport in Memphis, Tennessee. The surveillance system was located at the south end of the parallel runways (Figure 2-1). The PRM installation is shown in Figure 2-2.
18R
36L
I= Federal 7 Express
9
Control lower
0
I Terminal !d
36R
FAA Sensor ..
Lincoln PRM Sensor
0 1 2
FT (x 1000)
Figure 2-1. MITLincoln Laboratory PRM location at Memphis International Airport.
3


Figure 2-2. MIT Lincoln Laboratory PRM sensor at the Memphis International Airport.
5


2.1 DATA COLLECTION
Su wei I lance Sensor
The Memphis PRM data collection system was an integral part of the PRM demonstration. The equipment and software involved consisted of AMPS (ATCRBS Monopulse Processing System), an Automated Radar Terminal System (ARTS) interface, experimental air traffic control displays, automated blunder detection alarms, a weather data acquisition and recording system, and an audio recording of VHF communications. Figure 2-3 is a flow diagram showing how all of the Memphis PRM system was implemented. The PRM system output was recorded in three media: 9-track digital tape, audio tape, and a site logbook. The following methods discussion is arranged by these recording medium.
/\
c I d I 1 ARTS 1 I Flight Identity Aircraft Type I n te rface - I
I Weather I I Weather Data Service
9-track digital data tape
I ’ \ - Site Logbook
Figure 2-3. Flow diagram of Memphis PRM data collection system.
2.1.1 Digital Data Collection System
The PRM computer system that processed the surveillance, ARTS, and weather data consisted of a Digital Equipment Corporation (DEC) MicroVAX engineering workstation. The computer also supported a high resolution monitor display, used by site personnel to watch during data collections to monitor the processes. A brief description of each subsystem in the PRM digital data collection system follows.
7

2.1.1.1 Mode S Sensor and AMPS Surveillance
The AMPS sensor provided surveillance performance of l-milliradian root-mean square (rms) azimuth accuracy and 30-foot rms range accuracy on all ATCRBS targets within the vicinity of the airport. The azimuth accuracy means that localizer deviation at 15 nautical miles (nmi) was measured with an rms e m r of 90 feet. The AMPS had a 2.4-second update interval in a 12Gdegree azimuth wedge (limited by the AMPS surveillance computer) or a 4.8-second update interval with 360aegree azimuthal coverage. The AMPS system also collected the aircraft altitudes using Mode C transponder data.
2.1.1.2 ARTS Interface
An ARTS interface was designed to transfer ARTS IIIA air traffic control display data tag information to the PRM system. The ARTS IIIA interface consisted of an Intel 80286 based single board computer and associated hardware that observed signals sent from the ARTS IOP MDBM to the DEDS maintenance display [SI. The data tag information signals were stored and provided to the PRM display system where they were associated with AMPS target data using Mode A discrete codes. This enabled the PRM displays to provide data tag formats identical to those seen on the operational DEDS displays. The ARTS data included the airline, flight number, aircraft type, and runway assignment.
2.1.1.3 PRM Computer System Sonware
The PRM computer system software received aircraft surveillance reports from the AMPS sensor. The surveillance reports, nominally one report per aircraft per antenna scan, were processed by the software as follows:
1. Each report was compared, by Mode A code, to data in the ARTS information table. If a valid correlation was made, the ARTS data were appended to the surveillance report. If valid data for a particular Mode A code were not available, the software requested the data from the ARTS interface computer. The data would be appended, when they became available, to future surveillance reports.
Reports were processed by tracking and prediction algorithms. These functions provided estimates of aircraft speed and direction of motion that were used by the automatic alarm algorithm and for the display of data. The data analysis of localizer deviations, however, was based on un-smoothed target reports.
Possible alarm conditions were tested. If any of the alarm conditions existed, the corresponding status bits were set in the surveillance report. In addition, coasts and questionable data were tagged with the status bits.
The surveillance reports were plotted on the monitor display and recorded on 9-track tape.
2.
3.
4.
2.1.1.4 Aviation Weather Data Acquisition
While surveillance data were being recorded, current weather conditions from a dial-up weather service and from laser ceilometers located at two outer markers were recorded onto the same 9-traC.k t a p .

2.1 .I .4.1 Sulface Reports and Winds Aloft
The PRM data collection system acquired a variety of local weather conditions. Surface observations and winds aloft were acquired using a Macintosh SE connected by modem to Weather Service International (WSI), a commercial weather services source. Macintosh software was developed to periodically dial up, log on, download weather reports, format the reports, and transfer them to the PRM Display MicroVAX computer for recording. The frequency of dial up was every five minutes. The weather service updated the reports once an hour or when there was a change in the weather.
The surface reports were in National Weather Service standard fonnat [6]. The information included was location and time of report, cloud density and height, visibility, sea level pressure, temperature, dew point, wind speed and direction, altimeter setting, and remarks. The winds aloft for the Memphis area were forecasts based on balloon soundings taken in Nashville, Tennessee, twice daily. The forecasts were of wind direction and speed for flight levels of 3,000 to 39,000 feet MSL in 3,000-foot increments.
2.1 .I .4.2 Ceilometers
Two laser ceilometers were installed at the FAA outer-marker sites for runways 36L and 18R to monitor the cloud layers on approach to Memphis. These locations are approximately 4.5 nmi from the runway thresholds. The ceilometers were modified to allow remote access over telephone lines. The ceilometer data were transferred to the PRM system via software for the weather Macintosh SE computer that provided automatic dial up, data retrieval, and data logging of the ceiling measurements at 10-minute intervals during a data collection session.. The ceilometer reports were then downloaded to the Display MicroVAX computer system for recording on the 9-track tape. The ceilometer reports were also displayed on the Macintosh for operator viewing.
The PRM laser ceilometer reported on zero to two layers of clouds, the heights of the cloud layers, and the range of reflection (thickness). They also estimated the vertical visibility.
2.1.2 Audio Data Recording System
A VHF communication and recording system was implemented to receive and record all significant air traffic control frequencies associated with amving aircraft at the Memphis Airport. The communication frequencies monitored included: amval feeders, arrival finals, local tower, ATIS, ground contml, etc. One of the tape tracks also was used to record RIG time code signals containing the day of the year and time. Up to eight channels could be recorded.
The radio system consisted of eight King KY-196.transceivers, a King KMA-24H-70 audio control panel, a power supply, audio amplifier, controls, interconnection cables. An Ionica TR-10 audio tape system recorded ten narrow band audio tracks on 1/4-inch tape. A 10 1/2-inch diameter reel provided 24-hour duration. The recorder was modified to selectively play back one or more tracks. A Datum model 9300 time code generator/translator was used to record and translate time signals on one of the tape recorder tracks.
2.1.3 PRM Site Logbook
A site logbook was kept during PRM operations. The data collection period (mission) was numbered, the date, time, and the location on 9-track tape were indicated. The corresponding audio tape was recorded with times and meter readings. Information about AMPS was recorded. The site
9

personnel monitored the radio to receive Automated Terminal Information Service (ATIS) reports and also the tower announcements. The ATIS weather reports were written into the logbook, as well as the Memphis tower announcements of active runways, and the ILS in operation. During the data collection period, weather changes and anomalies in the display system or with any of the observed flights were recorded. A sample logbook entry is shown in Figure 2-4.
2.2 DATA ANALYSIS
2.2.1 Analysis Hardware
The hardware used in the analysis consisteL of two Digital Equ.$ment Corporation (DEC) MicroVAXes and peripherals. One computer was dedicated to the relational database and the second computer was used for plotting and the analytical tasks. The hardware analysis system evolved during the PRM project as the expanding database defined the required capabilities.
The final hardware configuration for the relational database computer was a MicroVAX II/GPX with 13 megabytes of dynamic random access memory (RAM) and eight serial ports. The fixed magnetic disk drives were two drives with a storage capacity of 165 megabytes (RD-54) and two with a capacity of 677 megabytes each (MasterDisk). The Memphis arrival data were read by a nine track tape drive (TU-81). The computer used an eight millimeter (8-mm) tape drive (Masteffape 11) for short term backups and a removeable Write Once Read Many (WORM) optical disk drive (LaserDrive) for archiving purposes. The DEC tape cartridge drive (TK-50) was used for receiving new software. The terminals included a color graphics windowing terminal (VR-290) and a color graphics terminal (VT340).
The other analysis computer was a micmVAX 3500 with 16 megabytes of dynamic RAM and eight serial ports. There were two disk drives, one with a storage capacity of 280 megabytes (RA-70) and one with a capacity of 677 megabytes (MasterDisk). This computer had the same three tape drives as the relational database computer, except the tape cartridge was a TK-70. There was one color graphics windowing terminal (VR-290) connected along with a number of “text” terminals.
2.2.2 Data Management
The Memphis PRM data collection effort was very successful in that over 7,000 final approaches were recorded. This success required that the data analysis also include reliable and flexible management of the data. The core of the data management was a relational database management system (RDMS).
2.2.2.1 Relational Database Management System
The commercial relational database management system used was ORACLE which is based on the industry standard Structured Query Language (SQL). The relational database allowed flexibility by de-coupling the analysis from the data acquisition and storage. The data were easily queried for inconsistencies and also easily corrected using SQL.

t
P&CRM Data Collection Log MEMPHIS INTERNATIONAL AIRPORT
MISSION No. # 170 DATE 4'- /4 -89
pVAX #O TAPE No. PCRMOlVOOS000068 SYSTEM START TIME (7 '?+ 7 SOFTWARE VERSION 7.0
pVAX #1 TAPE No. FILE No.
SOFTWARE VERSION
FILE No. 2 SYSTEM STOP TIME OF0
PCRMO 1 VO 1 000 + VOICE TAPE?@ OR NO
A-PCRM89SOOOo38 AUDIO TAPE No.
TIME STARTED 253~.'d7.*99.'/i METER READING M 41 45
TIME STOPPEDa57;e ?.'o~:YQ
AMPS TAPE ?YES o@
METER READING pt 0358
14-DEC-88 LAST CAL DATE /I 1
AMPS MODE: < Back to Back 3 Single Face PRF # gb MAX RANGE (n.m.) 2s
ACTIVE SECTORS 6 TO / /
ENVIRONMENT FILE INSTALLED -&2 0
WEATHERlNTOpVAX ATIS WEATHER: l - 4 fl CEILING PI@ 7- O W S T -
TEMP. b< D.P. 6s WINDS 3 U / / d ALT. 2 7. 9 7 VIS I BlLlTY (n. m .) 1 5 &A- rn6
JOHN 0 Figure 2-4. A sample PRM site logbook page.
11

All data within a relational database appeared to be stored in table format to the analyst. The tables were made up of rows and columns. Each row was one record of information, for example, one track report and its corresponding data. The columns were the fields of information which make up each record, for example, report time, Mode A code, azimuth, range, etc.
The Memphis database had eight types of primary raw-data tables. The RDMS also allowed the analysts to create intermediate and summary tables. The central analysis summary table is discussed in Section 2.2.2.3. Short descriptions of the raw-data tables follow and complete field definitions are in Appendix A.
The PRM-LOGBOOK table contained a summary of information from the handwritten site logbook. (Figure 2-4 shows a sample.) This logbook table was referenced by the automated data entry functions in order to match a tape identification and file number with the correct mission number. This information was also used to locate classes or groups of particular missions.
The PRM-NOTES table was a transcription of the observation notes taken during each data recording session.
The SENSOR table contained data concerning the operating parameters of the AMPS equipment.
The WINDS-ALOFT table contained the reports of the projected Memphis winds aloft.
The SURFACE-REPORT table contained the WSI reports of the surface weather observations at the Memphis airport. This table contained data such as the temperature, the wind’s speed and direction, the dew point, and the visibility. The weather reports were on the data tape every 5 minutes. but were transferred to the RDMS only when there was new infomation (most often, only once every hour).
The SKY-REPORT table contained the WSI reports of the cloud conditions at the Memphis airport. This table contains data such as the cloud layer type and height. The weather reports were on the data tape every 5 minutes, but were transferred to the RDMS only when there was new information (most often, only once every hour).
The CEILOMETER table contained the cloud height measurements at the outer markers of Memphis 36L and 18R. MIT Lincoln Laboratory used these instnunents to measure the cloud base height at each runway approach every 10 minutes. Only when the report changed from the previous one was the ceilometer data stored on the database. The cloud heights measured by the ceilometer instruments were not required to agree with the WSI cloud height reports.
The MEMnnn table contained the surveillance radar target reports for data collection mission number “nnn.” Two hundred and sixty seven (267) separate mission database tables were on the database. Each record in these tables corresponds to a single AMPS radar target report.
2.2.2.2 Data Entry
The two methods to enter the PRM data into the relational database were through software and manual entry. The automated database input relied upon the ORACLE programmatic interface
12

c
tool PRO*C which embedded SQL statements into the C programs. The manual entry was assisted with several data entry forms programmed by an ORACLE Developers Tool, SQL*FORMS.
2.2.2.2.1 Automated Data Entry
Automated data entry consisted of reading the 9-track digital tapes recorded at Memphis, extracting the appropriate data, and storing it in the proper table in the database. Extracting the data were complicated because the target and weather reports were recorded as they happened.
Software filters were applied to limit the volume of data on the database while not eliminating valid information. One filter was that the ARTS field of the report had to contain a valid Memphis runway assignment. Another was that the blunder status field had to indicate a valid radar report, coast, beginning or end of track. The weather reports were compared with the previous one of the same type, and if there had been no change in the conditions, the report was not transferred to the database.
Extensive data checking was done to correct errors and omissions. After the data were entered into the PRM database, interactive SQL queries were used to identify problems. For example, often the ARTS infomation had errors from transmission noise or the runway assignments would be only “R* and “L.” The correct information would be found in related target reports or in the PRM site logbook, and the incorrect data would be replaced in the RDMS table. This patching was essential for later filtering and sorting of the approaches.
Test driver software was developed to test the weather report data entry onto the database. Most the conditions of the possible weather reports were identified beforehand and the data entry programs could be tested before reading any field data. As new and unexpected permutations in the weather reports were encountered the test drivers and data entry programs were updated.
2.2.2.2.2 Manual Data Entry
The data not recorded on the 9-track tape were manually entered into the PRM database. The mission operating parameters and notes from the Memphis PRM site logbook were typed into the PRM database using several data entry forms. The logbook information was sorted into three tables: PRM-LOGBOOK, SENSOR, and PRM-NOTES. Also, the first 62-data collection periods did not have automated weather recording, so those missions required manual entry of the weather data. The reports were obtained from the National Climatic Data Center in Asheville, North Carolina. SQL*FORMS was used to enter the weather observations into the RDMS tables SURFACE-REPORTS and SKY-REPORTS. The projected winds aloft for those 62-data collection periods will be entered at a later date if required for analysis.
2.2.3 Analysis Sofiware
The rest of the methods section describes the software used to analyze the Memphis PRM final approach total navigational system error. The software queried the database for relevant information, extracted selected tracks from the database, plotted the amval data, and performed statistical analysis on those tracks. Extensive checking of performance and logic was camed out throughout the analysis software.
13

2.2.3.1 PRM Approach Table
A very important contribution to the analysis of the recorded Memphis approaches was a summary table in the relational database. This summary of all the data allowed for queries to create subsets of the data, to easily count number of arrivals in different subsets, and to label each approach with the assigned weather category. The information contained in the summary table was the data collection period, the airline, fight number, aircraft type, runway, time that the track started and stopped, assigned weather category, and the time that the aircraft flew over the outer marker.
In a serious effort to be certain that only landing aircraft were included in the summary table, several restrictive'filters were used to determine the outer marker crossing time. First, the target had to have range values inside the outer marker for its assigned runway. Next, the aircraft had to be within a restricted azimuth value at the outer marker. No coasts or questionable reports were allowed within these range and angle limits. If the aircraft passed all these criteria, then the time that the aircraft passed over the outer marker was recorded in the PRM Approach table.
The weather category identified with each amval was based on the standard categorical outlooks [7]. The definitions of the limits of each of the weather conditions are shown in Table 2-1 and also illustrated in Figure 2-5.
Each arrival into Memphis was assigned a weather category based upon the approaches' outer marker time. First, each weather report time during a data collection period was categorized by the visibility and ceiling conditions. (Note that the winds aloft and ceilometer reports were not used.) Then, the outer marker time for each track was correlated to the closest weather report time previous to the outer marker time. The category associated with that weather report time was then assigned to the approach track.
VFR
IFR
Table 2-1
Data Collection Weather Categories
Categories (m Iles) (feet AGL) Visibility Ceiling
I Good 5 s v and 3000 I C I Marginal 3 s v < 5 and/or 1000 5 C < 3000 High 1 S V < 3 and/or 500 I C < 1000
1 Low v < l and/or C 500 I

4000
3000
2000
1000
500
.............. ................... ..................... ..................... *,*,*,*,**.,***, *,*,*,*. ..................... ..................... ~,~.~,~,...,~,...,...,.. ..................... ......................... *, *' *, ** *, *. *, .,*.*,*,*# .................. *, .. *. *. *.', *, *,'e *. *. *. .................... ..................... *,*,*e*, *, ** *'*, *e *,', *. *. *. .. *, .. *. *, .. *, *, *,
*, *. *# *e *a *e *e *a 'e *a *a -.
- *. *. *e 8 . *e '# *. *s *e
. *. *, *. *, *. *, *, *, *. *, *, *, ** *, *, *. *, *, *. .. *.*. *, *, *, *, .. *, *, .. ., *. ., *, ., ***,*e** .. *, , *e *. '* *, *. .... .. *. *, 8 .
0 1 2 3 4 5
Visibility (miles)
Figure 2-5. Illustrating the limits ofthe weather categories used in the data analysis.
2.2.3.2 Preparation and Analysis
The goals of the data analysis preparation were to check the tracks for reasonableness, convert coordinate frames, determine locations of localizer stabilization, and group the approach data. The analysis software used the grouped data to calculate statistics.
2.2.3.2.1 Final Approach Data Retrieval
Each final approach track was retrieved from storage in the relational database. The data were read from the RDMS with a C language interface to the Oracle database. The first phase was to list the aircraft observed in each data collection period. The aircraft were identified by their airline and flight number. This unique identifier was more reliable than the aircraft's A-code or the AMPS assigned track number. Using these flight identities, another C language interface to the Oracle database manager retrieved the radar report data.
2.2.3.2.2 Coordinate Transformation and Translation
The PRM data analysis was concerned with the deviation of a flight path from the extended runway centerline. The aircraft approach data were delivered from the radar in the cylindrical coordinates of slant range, azimuth and altitude with the origin at the radar location. So that the data could be more clearly displayed and more conveniently analyzed, a transformation was made to a Cartesian coordinate system and the origin was translated to the respective runway thresholds. The revised coordinate systems defined the range from the runway threshold as x, the centerline deviation
15

as y, and the altitude as z. The reported altitude was used to adjust the slant range to ground range outside of 8 nmi. Within 8 nmi the conversion was not significant for the landing aircraft altitudes.
Visual Review of Flight Data 2.2.3.2.3
Each final approach track was viewed to check the analysis software and the reasonableness of the data. Only x, y plots were examined. Figure 2-6 shows a sample of a final approach track plot. The problem most often found and corrected was an incorrect runway assignment in the ARTS information. If the flight had a missed approach or was a test flight, the data were not used in the analyses. The range, lateral deviation, and altitude data for each track were then stored in individual files.
2.2.3.2.4 Localizer Acquisition Filter
The track data were filtered for the segment where the landing aircraft appeared stabilized on the localizer beam. The filter algorithm is defined as follows. Once an aircraft had entered to within 1 degree of the extended runway centerline and stayed within this plus or minus 1 degree wedge, that position was marked. Then the aircraft was considered stabilized 1 nmi further in towards the runway. The one mile criteria was based on the Air Traffic Controller‘s Handbook where controllers are instructed to “provide at least 1 mile of straight flight prior to the final approach course intercept.” [8] Figure 2-6 shows an aircraft radar track with the filtered portions shown where the quantization symbols (see Section 2.2.3.3.6) overlay the track.
The aircraft radar tracks were also filtered by range for most of the data analysis. An approach passed the range filter if the point of localizer stabilization occurred at 9.4 nmi or more from the runway threshold. It was thought that the aircraft tracks so chosen resembled approaches of simultaneous ILS amvals. In addition, the range filter reduced effects of localizer acquisition that might not have been removed by the stabilization filter.
The value 9.4 nmi was determined by averaging the range where altitude separation was lost on the approaches to Memphis 18LLR and 36L/R. The arrivals to 18L and 36R are at 3,000 feet prior to glide slope intercept and MEM 18R and 36L are at 2,000 feet. Figure 2-7(a-c) illustrates the effect of the range filter on the number of amvals, the mean centerline deviation, and the standard deviation about the mean, respectively.
16

0 z 0
cu rl
n 5 Y
W I
W c. z W 0
z a 0
0 0 &
I
9
0
0 0
CQ I
9 4
0
0 0 v) (3
I
9
Stabilized on localizer
t
_e-- _--- ___---
0.00 4.00 8.00 12.00 16.00
DISTANCE TO RUNWAY (nml) 20.00
Figure 2-6. Exanqde @an aircrajit radar track tran@ormed to a runway Cartesian coordinate frame. The overlaid symbols show the portion defined to be stabilized on the localizer beam.
17

cn a > I
N
L
2 r 0
Q) L
n E a Z
r w -
600 -
500-
400 - 300 -
200 -
100 -
IFR conditions
0 No range filter With range filter at 9.4 nmi
0 : . . . . , . . . . I . . . .
0 5 10 15 Range (nmi)
150 I IFR conditions
100
501 0
MEM 36R All aircraft types
EI No range filter e With range filter at 9.4 nmi
-50: . - . . , . . I . . . .
0 5 10 Range (nmi)
15
Figure 2-7(a-b). The ~ e c t of the range filter on the number of arrivals and the mean centerline deviation.
18

n
Q) Q)
U
r U
J
0
i 400
With rake filter at 9.4 nrni
I . ' . . I . ' . .
300 -
200 -
100 -
MEM 36R All aircraft types
0 5 1 0
Range (nmi) 15
Figure 2-7(c). The effect of the range filter on the standard deviation about the mean.
2.2.3.3.6 Quantization
The last step in preparing the final approach data for analysis was to sort the final approach track reports into discrete areas. Sorting the data into discrete bins simplified combining the many aircraft tracks used to study the population characteristics of the TNSE.
The areas, or bins, were 0.2 nmi in range by 20 feet in centerline deviation within a grid system that covered the final approach region of 20 mi by f5,000 feet. The 20-foot centerline deviation bin width was selected as a reasonable compromise considering the 1 milliradian azimuth accuracy of the radar (6-foot cross-range at 1 nmi) and localizer deviation analysis. Each filtered final approach segment was overlaid with this grid system and the array bin that corresponded to the aircraft's (x, y) position was incremented. Data points outside of the filtered segment were not included in the bin counting. Figure 2-6 shows the segment of the aircraft track entered into the array bins. The minimum range of the track segment was set at 1 nmi.
The quantized flight data were normalized to adjust for the different speeds of the arriving aircraft. For example, if an aircraft had flown slow enough to have appeared twice within one range bin column, the accumulated statistics for that track were adjusted so that the aircraft was only counted once at that range. At this point, the amval data for each approach could be combined with other approaches.
To start analysis on a group of data, first the PRM approach table (Section 2.2.3.1) in the RDMS was queried for the list of flights that fit the specified criteria. For example, a query might request all of the flights amving in IMC that were general aviation aircraft. The resulting list was
19

used as input into the Binning program that then combined the listed tracks by runway. Figure 2-8 shows a sample of the resulting population density of the cross track deviations as a function of range.
2.2.3.3.7 Statistical Software
The main analysis tool was software that processed the grouped, binned track data and extracted data from specified range bins. It also combined the data from different runways, inverting the data about the extended runway centerline for 36R and 18R so that a positive lateral deviation was towards the other parallel runway approach. The program also set up ASCII files with the data extracted from the specified range bins in order to plot the cross sectional plots found in Section 3.2. The results in Section 3.3 were made by extracting the data from a range bin and summing the data beyond the specified NTZ boundary. The software conducted the core of the analysis with the mean, standard deviation, and 95% confidence limits of the lateral deviations in each range bin. The data and statistics were stored in ASCII fies for plotting with commercial software.
The analyses in Section 3 used the mean and standard deviation as an efficient and consistent way to compare different groups of amvals. (see Section 3.2 and Appendix B) The 95% confidence limits on the standard deviations were used to determine significant differences [9, 101. The means and standard deviations of the lateral deviations were calculated for all of the range bins from about 1.0 to 15 nmi. This moderated the effects of data in single range bins. It should be noted that the diminishing number of aircraft beyond 10 nmi often caused large variations in the statistics. It was decided to portray the means and standard deviations as such rather than delete out-of-range data based on an arbitrary rule since the number of aircraft that contributed to the statistics is provided.

0
0 0
e3
9
0
0 0
e2
9 4
0
0 0 P-
9
O
0 0 rc I
9
0
0 0
e2 I
9 4
0
0 0 v) c3 I
9
-- - ---- ~ 100% density 50% density 10% denmity 52 denmity 42 density SZ density 2% density 12 den6ity
0.00 4.00 8.00 12.00
Range (nmi) 16.00 20.00
Figure 2-8. Example of the quantizedpight data pooled together (density plot).
21

P

3. ANALYSIS AND RESULTS
I 36L 36R 18L IFR 665 692 304 MVFR 752 734 365 VFR 715 783 91 1 Total 21 32 2209 1580
3.1 DATA COMPOSITION
18R Total -
297 1958 355 2206 760 31 69
1412 7333
Final approach data into Memphis International Airport were collected from January 11, 1989, to November 15, 1989, and July 12, 1990, to March 1, 1991. In the first time span there were 162 data collection periods that recorded 7,333 arrivals to the parallel runways. The second time span was to collect final approach data while two of the four ILS localizer beams were narrowed (see Section 3.3.6 for results and discussion). There were 16 data collection periods for this subset of data with 803 approaches.
The final approaches in the first collection effort were recorded in all weather conditions. The distribution of the collected data across different weather categories was 26.7% in Instrument Flight Rules (IFR) conditions, 30.1% in Marginal Visual Flight Rules (MVFR) conditions, and 42.2% in Visual Flight Rules (VFR) conditions. The IFR and MVFR conditions appmach data were studied for this report, while the VFR conditions data were not.
The final approach lateral deviations were first examined by the assigned runway and then by the weather conditions during the approach. Therefore, as part of the composition of the data, the number of arrivals in each of these subsets is delineated in Table 3-1. One of the drawbacks of collecting “targets of opportunity” is that they do not all “behave” as desired. The filters applied to the data (described in Section 2.3.2.3) restrict the data sets to arrivals that stabilize on the localizer by 9.4 m i from the runway thresholds. The arrivals that were studied reflect the number of final approaches that remained in the database after the filters were applied. (See Table 3-2.)
Table 3-1 a
Table 3-1 b
23

Table 3-2a
Dlstrlbutlon of Arrlvals After Localizer Stabilization by 9.4-nml Filters
I 3 6 L Low IFR 45 Hlgh IFR 299 Total IFR 344
Table 3-2b
36R 1 8 L 1 8 R Total 50 91 94 280
329 80 91 799 379 171 185 1079
Another major characteristic by which the amvals were sorted was the aircraft type. For the major analyses, the aircraft were divided into aircraft 12,500 pounds or less (7.5%) and aircraft over 12,500 pounds. This follows the FAA’s categories of “small” aircraft and “large” or “heavy” aircraft. The majority (91.2%) of the aircraft observed were “large” aircraft (greater than 12,500 and less than 300,000 pounds). The analyses also included an examination for differences in the TNSE between different aircraft types (Section 3.4.3). Figure 3-1 shows the distribution of aircraft types in IFR and MVFR weather conditions before the localizer stabilization filters. Table 3-3 has the same information in more detail. The aircraft designators are defined in Appendix C.
i
Figure 3-1. The types of aircrajit and their proportion of the arrivals in IFR and MVFR weather conditions.
24

Table 3-3
The Types of Alrcraft and Their Proportlon of the Arrivals In IFR and MVFR Weather Conditions
BE90 23 0.6%
FK28 22 0.5%
BE58 20 0.5%
84 other aircraft types 388 9.3%
The recorded approached into Memphis were primarily from Northwest Airlines, Northwest Express, Federal Express, Delta Air, and General Aviation. Figure 3-2 shows the percentage of amvals from each airline. Although the TNSE was not examined as a function of airline in this report, this distribution is included for completeness.
25

0.1 0,
7.4%
60.0%
15.1
Figure 3-2. The distribution of airlines contributing to the Memphis PRM data.
3.2 GENERAL CHARACTER OF THE MEMPHIS FINAL APPROACHES
The final approaches to the Memphis parallel runways were considered as a representative sample of the whole population of amvals and were studied as a group. The approaches have not been studied individually. The purpose of this section is to impart the general character of this population of arrivals.
This report is not the first to study flight data this way. The Franklin Institute gathered track data of 2,000 final approaches to 10 airports in 1959 and analyzed the distributions of the approaches [ll]. The following figure from that report illustrates how the amvals are dispersed about the extended runway centerlines (Figure 3-3). Close in to the runways, most of the aircraft are very close to the centerline. As the distance from the runway increases and the altitudes increase, the anivals become spread out.

Figure 3-3. Distribution ofarrivals to dual runways. [ll]
The population of final approaches into Memphis behaved in the same manner. Note that from the Memphis data in Figure 3-4, the changing spread of the lateral distributions as the distance from the runway threshold increases from 2 to 15 m i . The data shown are from aircraft over 12,500 lbs. in IFR weather conditions, the four runways combined. Figure 3-5 is also a cross-sectional plot, but now of the approaches to 36L and 36R at 10 mi. The approaches have similar distributions that are mirror images of each other.
27

0.15 . L
2 nmi
5 nmi
! ?
Q ! !
0.15-
< - c : 0.10:
I
: ? 10 nrni
- 0 c
0.10 r 0
c
E L
0.00 " O 5 0
15 nmi
?
? iL
0.00 - -1500 -1000 -500 0 500 1000 1500
Centerline Deviation (feet)
Figure 3-4. Distribution of ILS arrivals into Memphis in IMC (36LIR and 18LIR combined).
28

2 0 , a I I
cn E E
1 I I I I r I NTZ
I ' a I I
I I :
C -
10
5
0 -3000 -2000 -1000 0 1000 2000 3000
Lateral Position at 10 nmi (feet)
Figure 3-5. The distribution of approaches in IMC to Memphis 36L and 36R (303 and 320 arrivals, respectively). A hypothetical NlZ is indicated.
The approach distributions have shapes resembling normal curves except for some extra central peakedness and slightly thicker tails. The similarities, studied and reported in Appendix B, are such that the Memphis data can be approximately modeled with normal distributions. The approach distributions were also compared to the ICAO Collision Risk Model in Appendix D.
3.3 EFFECT OF TNSE ON NTZ PENETRATION
One of the goals of the PRM project was to assess the feasibility of independent approaches to the Memphis parallel runways (spacing 3,400 feet). The implementation of independent approaches would include an NTZ of 2,000 feet between the runways. This section examines the recorded Memphis approaches with respect to their position relative to an NTZ. In addition, the Memphis approaches are extrapolated to other runway spacings to predict the effect of TNSE on independent amvals to those runway spacings.
The Memphis amvals were examined as if they had been conducted with independent simultaneous parallel approaches. A direct illustration of an NTZ on the TNSE is in Figure 3-6 which is a density plot superimposed with NTZ boundaries. The reader can see that some of the aircraft would have been in the NTZ.
29

0
0 0 In c3
9
0
0 0
cu
9 w
n
Q) Q)
- 0
” r
.- I
I I - - - - - - - - - - - - - - - - - - - - - - - - - - - - I
0
0 0 In c3
9 I I I I I I I I I
I 0.00 4.00 8.00 12.00 16.00 20.00
Range (nmi)
Figure 3-6. Distribution of IMC approaches to MEM 18R showing the overlap of some arrivals into an NTZ.
3 0

To quantify NTZ penetrations, a more comprehensive examination was done using the cross sectional distributions in Section 3.2. Figure 3-7 demonstrates, with the solid area, the source of the number of aircraft in the NTZ. The percentage of aircraft in the NTZ was calculated for a number of ranges from the runway thresholds. The resultant curve is shown in Figure 3-8.
MVFR weather conditions Aircraft over 12,500 Ibs. I
I I I
I
a
! a I
I I I I I I
I NTZ
-1500 -1000 -500 0 500 1000 1500
Lateral Position at 9 nmi (feet)
Figure 3-7. Cross section of the final approach denn'ly at 9 nmi. The solid area indicates the approaches inside the NIZ.
Next, the Memphis data were extrapolated to three other runway spacings: 2,600, 3.000 and 4,300 feet. This was done by varying the distance on the cross-sectional distributions from the extended runway centerline to the NTZ boundary: 300, 500 and 1,150 feet, respectively. Figure 3-9 shows the resultant curves of the percentage of aircraft that are projected to be found in the NTZ as a function of range from the runway threshold. For example, consider aircraft 9 nmi from the runway threshold (this was shortly after altitude separation was lost). If the Memphis runways were 4,300 feet apart, essentially zero aircraft would be in the NTZ. At the real runway separation, 3,400 feet, 3.5% of the amvals are in the NTZ. If the runways were 3,000 feet apart, 8% of the arrivals intrude into the NTZ. And if the runways were 2,600 feet apart, 20% of the approaches would be found in the NTZ at 9 nmi.
31

15
10
5
34004 Runway Spacing MVFR weather conditions Aircraft over 12,500 Ibs.
P z E I
Y r E 2 a r
Y 0
E a
n
0 - 0 s 10
Range (nmi) 5
Figure 3-8. The percentage of Memphisjinal approachesin an NlZ as a function of range from the runway threshold.
35
30
25
20
15
10
5
0
r z E I
U r L a 2 a r 0 U E a a 2 n
5.0 10.0
Range (nmi) 15.0 0.0
Figure 3-9. The percentage of aircraft projected to be in an N7Z at 4 different runway spacings as a function of range from the runway threshold.
32

3.4 MEMPHIS DATA SUBGROUP ANALYSES
The approach data were further analyzed, by subgroup, to identify the significant characteristics of the lateral deviations of aircraft on final approach. The variables examined were runway, weather, aircraft type, autopilot usage and localizer width. By examining subcategories of data, the sensitivities of the TNSE to each variable were identified.
The method used to compare the final approach data was to graph the mean and standard deviation of the centerline distributions as a function of range from the runway threshold. Although the approach distributions are not normally distributed, for the purposes of analysis the distributions were approximated by normal distributions (Appendix B). For this assumption, the means and standard deviations provide a simple way to compare different subsets of data. In order to determine if two groups were significantly different, the 95% confidence limits on the standard deviation were compared. Statistically this means that if the area between two pairs of upper and lower confidence limits did not overlap, there is less than a 5% probability that the groups come from the same population.
The results of this analysis showed that the TNSE of approaches to individual runways only differed in the mean lateral deviation. While the level of weather had significant effects, differences in the TNSE of different aircraft were few. Narrowing the localizer beam did not have a significant effect on the TNSE. The following sections document the details of how each variable affects TNSE.
3.4.1 Each of the parallel runways
The first subgroup of the Memphis final approach data was the flights to the four parallel runways, 36L, 36R. 18L, and 18R. By showing that the approaches to the four runways were operationally similar, the data could be combined into one data set. This simplifies further analysis and enlarges the available database for comparisons.
Figure 3-10 shows the means of the four approach streams of large and heavy aircraft in MVFR conditions. MVFR conditions were used to be more conservative (see Section 3.4.2.2). Within the range where the data are “range filtered” (19.4 nmi), the only outlier is MEM 18L where the mean becomes about 100 feet greater towards the other runway than the other three groups. Otherwise, the means are within 100 feet of each other. (Recall that a positive deviation is towards the other runway.) Note in Figure 3-11, that beyond 9.4 m i the number of aircraft tracks diminishes which results in noisier estimates of the mean and a greater sensitivity to individual aircraft localizer acquisition patterns. It was decided, however, that the mean centerline deviations of the four data sets were operationally similar.
33

Figure 3-12 shows the standard deviations of the mean lateral positions for the four runway approach streams. Inside 9.4 nmi the standard deviations are very closely intertwined. Beyond 9.4nmi the two pairs of runway data (36L&R and 18L&R) separate, but not more than 150feet. once again probably due to localizer acquisition patterns. For the purposes of this report, the centerline deviations of the parallel final approach streams were considered operationally similar. With the conclusion that the statistics are equivalent, the data from the four Memphis runways can be combined.
200 n
Q) Q)
w
= 100
I U Q > Q)
I
n a 0
t I I
U c Q) 0 C Q
-1 00
r" -200
j Q MVFR36R 0 MVFR36L
MVFR 18R 0 MVFR 18L
heavy and large aircraft range filtered at 9.4 nmi
0 5 10
Range (nmi) 1
Figure 3-10. The mean centerline deviation of the arrivals to Memphis 36LIR and 18LIR in MVFR weather conditions.
34

800
600 WJ 0 > .I
I
L
4
S MVFR36L 0 MVFR36L rn MVFR18R 0 MVFR 18L
i I 0
0
a 5 E 23 - 200 ._j
rn heavy and large aircraft range filtered at 9.4 nmi
0 I . . . . I . . . .
0 5 10
Range (nmi) 15
Figure 3-11. The number of arrivals to Memphis 36LlR and 18LIR in MVFR weather conditions.
700
600 U Q) Q)
C 0
.! 400 >
- Y
500
- U
E E 5 200
5
300
0 U
100
0 0
1
I
MVFR36R 0 MVFR36L rn MVFR18R 0 MVFR 18L
heavy and large aircraft range filtered at 9.4 nmi
I I I
5 10 Range (nmi)
1 5
Figure 3-12. The standard deviation of the centerline deviations of the arrivals to Memphis 36LIR and 18LIR in MVFR weather conditions.
35

3.43 TNSE in Different Weather Conditions
The next variables studied were the cloud ceiling and visibility on approach and the effect of surface winds. The PRM approaches into Memphis were grouped according to the weather categories defined in Section 2.3.2.2.4, Low IFR, High IFR and MVFR. The definitions are reprinted here in Table 3-4.
Table 3 9
Data Analysls Weather Categorles
Categories Visibility (miles) Ceiling (feet AGL)
and/or 1000 5 C c 3000
High IFR 1 1 V c 3 and/or 500 I C c 1000
Low IFR V c l and/or C c 500
The Memphis approach data that were analyzed for this section consisted of aircraft over 12,500 pounds, also called heavy and large aircraft. Only aircraft that were stabilized on the localizer by 9.4 m i were included in this data set. The analysis combined the approaches to the four runways where a positive deviation is towards the other parallel runway.
3.4.2.1 Low IFR Arrivals Compared to High IFR Arrivals
Figures 3-13 to 3-16 show the comparison of anivals during High IFR weather conditions to amvals during Low IFR conditions. There were more than twice as many approaches in High IFR weather, which is consistent with the amount of severe weather in Memphis during the PRM demonstration. The mean lateral positions of the approaches (Figure 3-14) during Low IFR conditions were closer to zero than when the ceilings or visibility were higher, but only closer by an average of 16 feet inside of 9.4 nmi. The Low IFR approaches were slightly less spread out than the High IFR approaches (see Figure 3-15). However, the Low IFR - High IFR approach differences were insignificant because the 95% confidence limits overlap (see Figure 3-16).
36

v)
Q > I
I
L
3
t n E a
r 0
z
800
600
400
200
0 0
High IFR conditions -1 Low IFR conditions a
a '8, ia %I
s
0
0
IR . . . , . . . . , . . . . , " * .
5 10 1 5 Range (nrni)
2 0
Figure 3-13. The number of aircraft over 12500 lbs approaching in high IFR and low IFR weather conditions.
100
50
0
-50
-1 00
-1 50 0
High IFR weather conddions Low IFR weather conditions
0 0 0
0
0 0
4
I
5 10 Range (nmi)
15
Figure 3-14. The mean centerline deviation of approaches in high IFR and low IFR weather conditions.
37

n
Q) Q) = C 0
a > Q)
U
I
w .I
n E
G
Q U E a
600 I 4 High IFR weather conditions Low IFR weather conditions
500
400
300
200
100
0 5 10 Range (nmi)
1 5
Figure 3-15. The standard deviation of the aircraft lateral positions in high IFR and low IFR weather conditions.
800 - Q High IFF? weather conditions ( 1
700 - 0 Low IFR weather conditions . 600 - .*
500 - 400 - 300 - 200 - 100 -
0 t " I " "
0 5 10 15 Range (nmi)
Figure 3-16. The 95% confidence intervals on the standard deviations of the high IFR and low IFR condition arrivals.
38

3.43.2 MVFR Weather Conditions vs IFR
The next groups to be compared are the arrivals during IFR and MVFR weather conditions. The number of approaches in these two data sets are well matched (Figure 3-17). Both have nearly 1,OOO arrivals that remained after the localizer stabilization and range filters were applied. The mean centerline positions of these approaches were very similar inside of 9 nmi (Figure 3-18). Outside of 9nmi, the MVFR approaches tended more towards the extended runway centerline, but not more than 50 feet. An interesting result is that the standard deviations of the arrivals during IFFt are significantly less than the MVFR approaches, from 3 nmi and out (Figure 3-19). The magnitude of the differences in the standard deviations increases to 60 feet at 10 nmi. This is not a large amount, but the difference is consistent as shown in Figure 3-20.
1000
800
v)
Q > I - 600
2 r 0
D
3 z
400
E
200
0
IFR
I
0
0
d . . . , . . . . , . . . . , . . . *
0 5 10 1 5 2 0
Range (nmi)
39
Figure 3-17. The number of aircraft over l2JOO lbs. arriving in Memphis in IFR and MVFR weather conditions, stabilized by 9.4 nmi.

1 00
50 -
0 -
-50 9
-1 00 0
IFR MVFR
1 . . 1 . .
0 I 0
5 10 Range (nmi)
15
Figure 3-18. The mean lateral position of the approaches in IFR and MVFR weather conditions.
600
400 -OI
200 3001 100 4
p IFR 0 MVFR
I
0 5 10 Range (nmi)
15
Figure 3-19. The standard deviation ofthe lateral positions of the IFR and MVFR weather arrivals.
40

700
*- 600 - 500 - 400 - 300 - 200 - 100 -
im
0 : . . . . , . . . . , . . . . 0 5 10
Range (nmi) 15
Figure 3-20. The 95% confidence intervals on the IFR and MVFR standard deviations.
3.4.2.3 Crosswinds
Ten data collection periods had reports of surface crosswinds or gusts of 10 knots or greater. Only one data collection day had consistently strong crosswinds (November 15, 1989). In the other periods, the weather tended to calm down within a half an hour of the start of data collection. On November 15, 1989, the crosswinds were 11 to 17 knots with crosswind gusts up to 29 knots (both IFR and MVFR weather conditions). Of the 55 radar tracks in that data collection period, only 22 were of large or heavy aircraft that stabilized on the localizer by 9.4 m i (Figure 3-21). The mean centerline deviation and standard deviation of these arrivals are compared to the statistics of data collected during calm cross wind conditions on the same runways, Memphis 36L and 36R in Figures 3-22 and 3-23. A lot of the difference in the statistics are due to the different sample sizes, 22 for the windy conditions and about 1,200 for the calm. However, the author would still conclude that the crosswinds appear to have more lateral deviations from 6 nmi and out. That is what would be expected.

25 IFR and MVFR weather conditions Heavy and large aircraft mmmmrmrrmrrpmmm
BJm IJmmIJ 0-
10 - . 5 -
r 0
aa m
z
L
E a
rn * P
Q m IJ
IaQ m
p39 m
83 m
Lcp - r n
8 0 0 8
Figure 3-21. The number of arrivals during heavy crosswinds, stabilized by 9.4 nmi.
C 0
Q > aa
Q) E
I Y
I
n
5 .I I
c, E aa 0 E Q
2" -1501
IFR and MVFR weather conditions Heavy and large aircraft
P CJ
L3 Crosswinds
Calmwinds
Q Q
IJ CJ
1 -200 : . I . I . . . 1 . I . 1 . I , , . , . I ,
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Range (nmi)
Figure 3-22. Comparing the mean centerline deviations of crosswind to calm conditions. The approaches are to Memphis 36L and 36R. combined. The calm conditions have 1,243 arrivals.
i 42

n
a? a? = c 0
0 >
U
- U
.I
s E
z 0 0 E Q
Heavy and large aircraft
Ip Crosswinds
0 Calmwinds 500
300
200
700 IFF? and MVFR weather conditions
Q
#I
El
0
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Range (nmi)
Figure 3-23. Cokaring the standard deviation of the centerline positions of crosswind to calm conditions. The approaches are to Memphis 36L and 36R, combined. The calm conditions have 1,243 arrivals.
3.4.3 Aircraft types
Another important variable in the total navigational system error is the aircraft type. The approaches were analyzed in numerous combinations: weight class, General Aviation, individual aircraft, and age of autopilot systems. In summary, the aircraft type does not in general change the TNSE. A few of the comparison did show differences, most markedly between the B727s and the B757s.
In the analysis of the effect of the aircraft type on the TNSE, the data from the IFR and MVFR weather conditions were combined. Even though there was a small difference in TNSE from the weather, combining the data sets allowed more variables to be studied; for instance, there were only enough heavy aircraft to study in the combined weather. This approach has the effect of making the results slightly more conservative.
3.4.3.1 Aircraft Weight Classes
The first groups compared were the three aircraft weight classes. A small aircraft has a maximum take-off weight of 12,500 pounds. Large aircraft are more than 12,500 but less than 300,000 Ibs. and heavy aircraft are 300,000 lbs. or more [15]. The reader can see in Figure 3-24 that the large aircraft dominate the PRM amval data set. The mean lateral positions of the three weight classed (Figure 3-25) are similar out to about 10 nmi where the mean position of the heavy aircraft leaves the other two. The standard deviation of the three weight classes are intertwined (Figure 3-26).
43

Inside of the outer markers (about 4.5 nmi) the heavy aircraft's TNSE is the least, and the small aircraft have the largest TNSE. Between 7 and 12 nmi the small aircraft have the smallest TNSE. Over all, the three weight classes do not appear to have significantly.different TNSEs.
2000
1500
lo00
500
Large Aircraft
IFR and MVFR weather conditions 0 - . . . , . . . . , . . . . , . . . -
0 5 10 15 20 1 50 1
I Q HeavyAircraft a- 0 Small Aircraft
lo0
50
0 0 5 10 15 20
I Range (nmi)
Figure 3-24. The number of am'vals categorized by aircrafr weight class.
44

n
Q) 0)
C 0
a > aa 0
aa E
U
r U
I U
I
I - z U E
3 E a
200
1 00
0
-1 00
-200 0
Q Heavy Aircraft 0 LargeAircraft n Small Aircraft
Qn
Q
IFR and MVFR weather conditions
5 10
Range (nmi)
1 5
Figure 3-25. The mean centerline deviations of the Memphis approaches by weight class.
n
Q) 0) = E 0
Q > a 0
U
- U
I
E
5
a U c a
700
600
500
400
300
200
100
0 0
HeavyAircraft 0 Large Aircraft
SmallAircraft
I n .J e I.,
5 10
Range (nmi)
1 5
Figure 3-26. Comparing the standard deviations ofthe lateral positions of the am'vals grouped by aircraft weight class.
45

3.4.3.2 General Aviation
The next grouping examined was the TNSE of the General Aviation aircraft. Figure 3-27 shows the low numbers of these aircraft in the PRM database. Most of the General Aviation amvals are to Memphis runways 27 and 9, not to the parallel runways. The General Aviation TNSE in IFR and MVFR weather conditions combined was compared to the heavy and large aircraft in the same weather. Figure 3-28 to 3-30 show that there was no significant difference in the TNSE between the General Aviation and the heavy and large aircraft. This conclusion is confinned in Figure 3-30 where the area between the 95% confidence limits on the General Aviation's TNSE include the limits on the heavy and large aircraft deviations. The wide spread of the General Aviation 95% confidence limits as compared to the heavy and large aircraft's limits is most likely due to the much lower number of aircraft in the samples.
0 5 10 15 Range (nrni)
2 0
Figure 3-27. The number of General Aviation arrivals to the parallel runways.

n
0) Q) = C 0
Q > Q)
Q) C
Q)
C
U
I
CI
I
n
I I
L U
3
E" C Q
0
4 e
Q rn
0
1
0 5 10 1 5 Range (nmi)
Figure 3-28. Comparing the mean lateral position @General Aviation arrivals to approaches by heavy and large aircraff. The data from IFR and MVFR weather conditions are combined.
J
500 - n
0) Q) Z 400-
c 0
Q 300- >
w
I
Y
I
8
5 100
2
z * O 0 1
Q U
General Aviation Aircraft Heavy and Large Aircraft l
0 5 10 Range (nmi)
15
Figure 3-29. Comparing the standard deviations of General Aviation approaches to heavy and large arcrqft. (IFR and MVFR weather conditions)
47

800
n
c z
= C E O
02 600 u)
-.I)
Q a- : 400
I Y
General Aviation Aircrafl Heavy and Large Aircraft
0 : . . . . , . . . . , . . . . 0 5 10
Range (nmi) 15
Figure 3-30. The 95% co@dence limits on the standard deviations @General Aviation aircraft and heavy and large aircraft in IFR and MVFR weather conditions.
3.4.3.3 DC9, B727, SF34, BA14 This section examines the TNSE of the four most predominant aircraft in the PRM database,
the DC9, B727, SF34, and the BA14. Figure 3-31 shows the number of arrivals of these four aircraft in IFR and MVFR weather conditions. The mean centerline positions of the four aircraft were similar inside of 9.4 mi (Figure 3-32). Outside of 9.4 nmi the BA14 aircraft tended more towards the other parallel runway. Figure 3-33 shows the standard deviations of the TNSE of the four aircraft. The DC9, B727, and SF34 all flew quite similarly. The BA14 aircraft were significantly more scattered inside of 9.4 nmi. The 95% confidence limits have a line drawn at 9.4 nmi to emphasize the pattern of the BA14 TNSE (Figure 3-34).
48
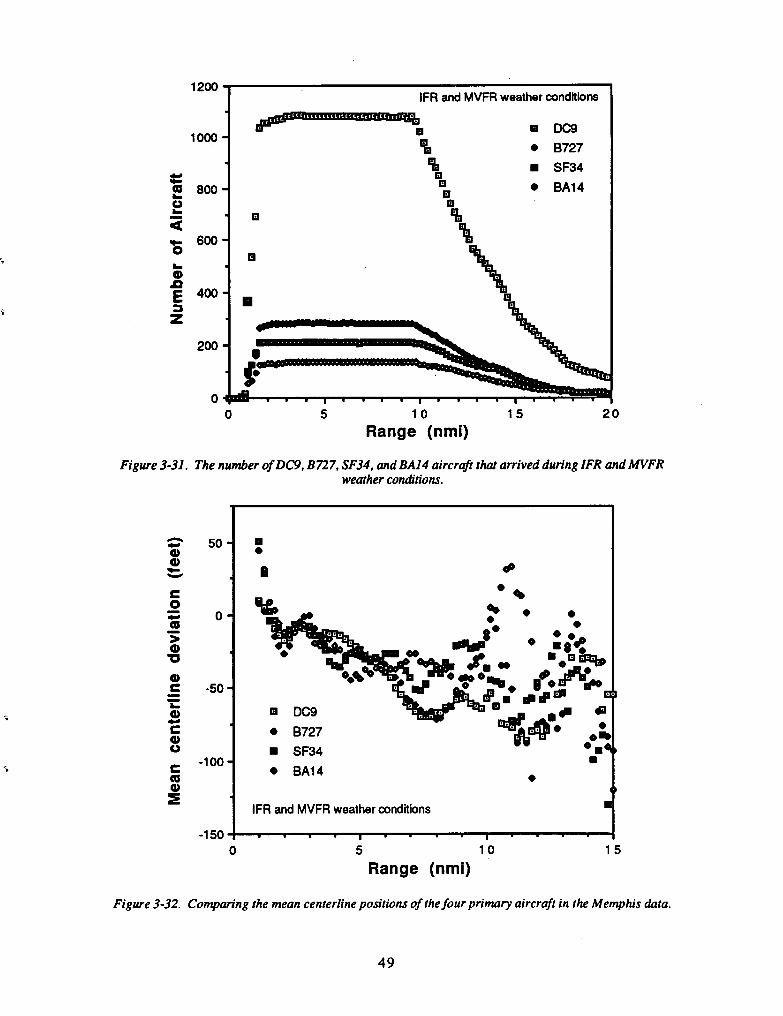
1200
1 000
Y c 800
2 a
t E 400
0
r 600 0
a 3 I
200
0
5
IFR and MVFR weather condlions
19 m D c 9 0 B727 Q
Q
B SF34 0 BA14
Q e Q e
Q B % \ 13
e
0 5 1 0 1 5 2 0 Range (nmi)
Figure 3-31. The number of DC9, B727. SF34, and BA14 aircrdt that arrived during IFR and MVFR weather conditions.
50
0
-50
-1 00
-1 50 0
0 0
0
13 Dc9 0 8727
SF34 0 BA14
- 0
I IFR and MVFR weather conditions
I " " I " "
5 10 Range (nmi)
1 5
Figure 3-32. Comparing the mean centerline positions of the four primary aircraft in the Memphis data.
49

o ! . . . . , .
I
0 5 1 0 15 Range (nmi)
Figure 3-33. Conparing the standard deviations ofthe four primary aircr@.
800 I I
I IFR and MVFR weather conditions m
700 - 600 - 500 - 400 - 300 - 200 - 100 -
m I . * A D C 9
8727 SF34
0 BA14
. I I
I m
0 : . . . . I . . I
I " "
0 5 10
Range (nmi) 1 5
Figure 3-34. Comparing the 95% coy5dence limits of the standard deviations of the four aircrafi types. Notice the larger values of the BA14 aircraft.
50

3.4.3.4 Comparing the TNSE of B727 and B757 It is of interest to compare the lateral deviations on approach of the two Boeing Company
aircraft, B727 and B757, because of the difference in age of the aircraft systems. There were not enough data to do a similar comparison with another manufacturer's aircraft.
The following four figures compare the anivals of B727 to B757 in IFR weather conditions (Figures 3-35 to 3-38). The mean centerline positions (Figure 3-36) are not different, but the standard deviation of the lateral TNSE is significantly different (Figure 3-37). There is about a 70-foot difference between the standard deviations within 5 and 9 nmi. The 95% confidence limits of the two aircraft do not overlap except between 10 and 11 nmi (Figure 3-38). The results when the data from IFR and MVFR weather conditions are combined are similar, but not so dramatic.
,
150
cn - p 100
2
t n E 50 a
- L
r 0
Z
0
0
El
IFR weather conditions
8727 B 8757
4a
8 I . . ' . I ' " ' I '
0 5 10 1 5 2 0 Range (nmi)
Figure 3-35. The number of arrivals in Memphis of B727 and B757 aircrqft.
51

50
0
-50
-1 00
19 8727 (IFR) 0
0 8757 (IFR) 0
0 O 0
0
Q
1 ' 1 . 1 . 1 ' 1 ' 1 . 1 ' ~ . ~ . ~ . ~ .
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 Range (nmi)
Figure 3-36. Conparing the mean lateral positions of the B727 and B757 approaches.
400
n - 300 Q) Q) = c 0 - c, 200 - > Q) 0
2
3i
Q 100 U r a
0
8727(IFR) 0 8757 (IFR)
I J ,
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 Range (nmi)
Figure 3-37. Comparing the standard deviations of the B 727 and 8757 arrivals.
52
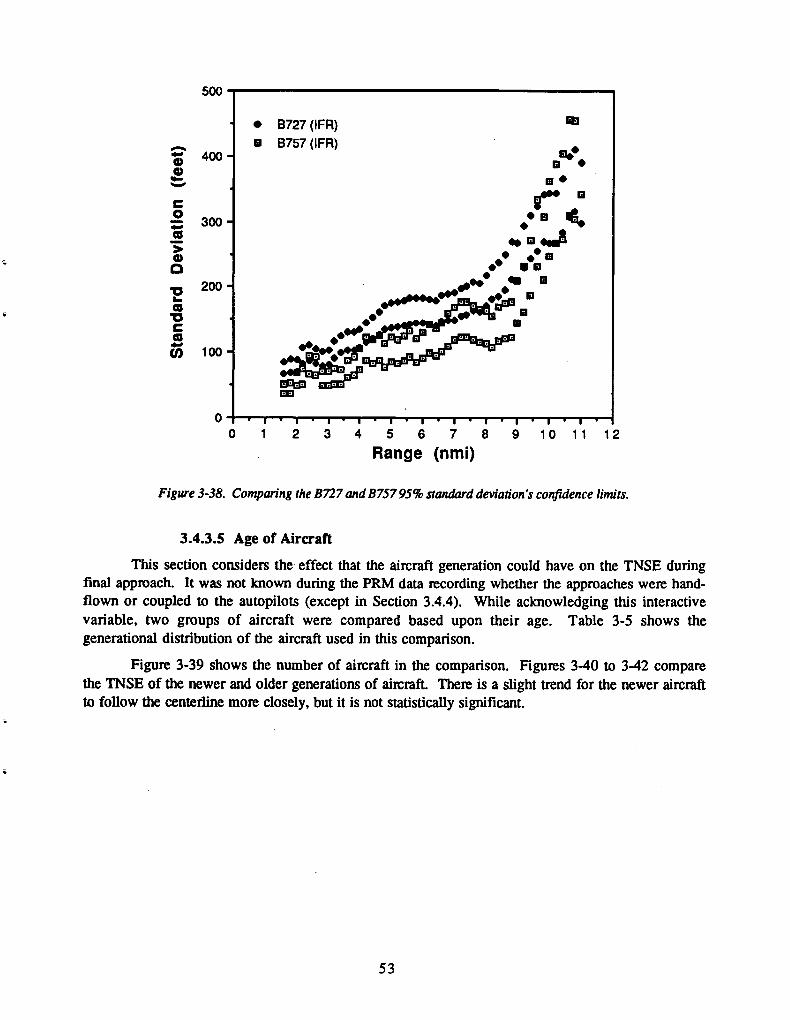
B727(IFR) n Q B757(IFR)
Q)
400
r U
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 Range (nmi)
Figure 3-38. Comparing the 8727 and B757 95% standard deviation's confidence limits.
3.4.3.5 Age of Aircraft
This section considers the effect that the aircraft generation could have on the TNSE during final approach. It was not known during the PRM data recording whether the approaches were hand- flown or coupled to the autopilots (except in Section 3.4.4). While acknowledging this interactive variable, two groups of aircraft were compared based upon their age. Table 3-5 shows the generational distribution of the aircraft used in this comparison.
Figure 3-39 shows the number of aircraft in the comparison. Figures 3-40 to 3-42 compare the TNSE of the newer and older generations of aircraft. There is a slight trend for the newer aircraft to follow the centerline more closely, but it is not statistically significant.
53

Table 3-5
Distrlbution of Memphis Arrivals to Compare Newer and Older Aircraft
Percent of MEM Percent of MEM Older aircraft IFR, MVFR data Newer alrcraft IFR, MVFR data
8727 13.3 MD80 0.9 DC9 49.7 8757 2.8 DC10 1.2 SF34 9.0
I 1.4
BA14 BA3 1
I FK28 I 0.5 I1 I I
Total 72.1 Total 12.7
1500
1000
500
0
IFR and MVFR weather conditions
rJ Newer 0 0 Older
-0 0
t 0 0 0 0 0 0
0 0 .. 'c \ 0
'c OO
% 0
-\
0 5 10 15 20 Range (nmi)
Figure 3-39. The number of arrivals in the older and newer generation aircr@t data set.

VI
VI
0
v,
=10
P)
3
(P
tD n
3 3 -. Y
..A 0
-.
v,
Sta
ndar
d D
evia
tion
(fee
t)
A
ru
0
v1
Q)
0
0
0
0
0
80
0
0
0
0
0
0
Mea
n C
ente
rlin
e D
evia
tion
(fee
t)
i
i
0
0
0
VI
0
0
VI
0
in

E - n 0 %
0 a 700
IFR and MVFR weather conditions
600 - 500 - 400 - 300 -
200 - 100 -
0 : - . . . , . . I " ' .
0 5 10 Range (nmi)
1 5
Figure 342. The 95% confidence limits on the standard deviation ofthe older and newer aircraJt in the Memphis PRM data.
3.4.4 Autopilot Performance
TNSE data from autopilot coupled approaches were examined to discover any differences between autopilot and hand-flown approaches. It was supposed that autopilots might reduce the flight technical error (FIE) portion of the TNSE and thus facilitate independent approaches to closely-spaced parallel runways. An experiment to test this hypothesis was performed in Memphis with the cooperation of Federal Express [12]. The results of the Memphis experiment did not show a distinct difference between the two approach modes except outside of 7 m i . The study used B727 and DClO aircraft (80% and 20%. respectively, of the total). Boeing Company data on the performance of newer autopilots were also examined [13]. The newer autopilots show significantly smaller deviation than the approaches measured at Memphis.
The autopilot-coupled approach versus hand-flown approach experiment was camed out during normal Federal Express operations at Memphis. Data were gathered during five late-night amval periods: May 30 to June 2, 1989, consecutively, and the night of September 25, 1989. Visual meteorological conditions (VMC) prevailed all five nights with light winds, and the airport was operating under visual flight rules (VFR). Pilots were selected alternately to fly manually without outside visual reference or using the autopilot.
The approach data were processed using the same methods as the other Memphis site radar data, described in Section 2.3.2.3, except they were not filtered by the range that localizer
5 6
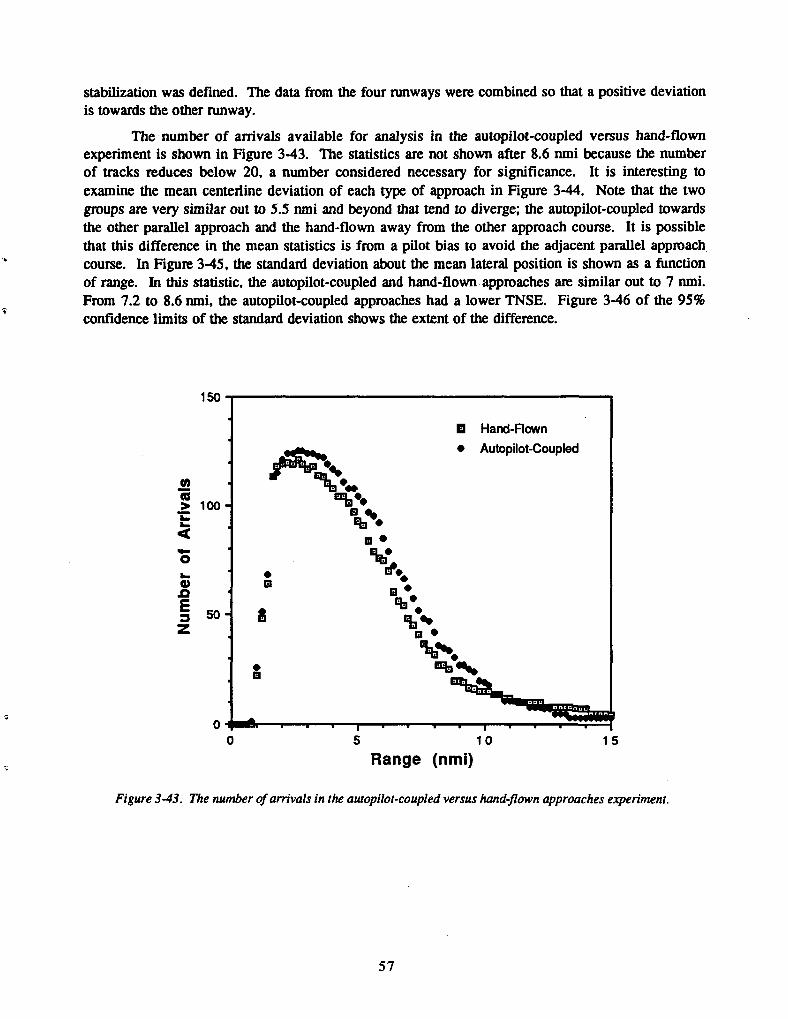
stabilization was defined. The data from the four runways were combined so that a positive deviation is towards the other runway.
The number of arrivals available for analysis in the autopilot-coupled versus hand-flown experiment is shown in Figure 3-43. The statistics are not shown after 8.6 nmi because the number of tracks reduces below 20, a number considered necessary for significance. It is interesting to examine the mean centerline deviation of each type of approach in Figure 3-44. Note that the two groups are very similar out to 5.5 nmi and beyond that tend to diverge; the autopilot-coupled towards the other parallel approach and the hand-flown away from the other approach course. It is possible that this difference in the mean statistics is from a pilot bias to avoid the adjacent parallel approach course. In Figure 3-45, the standard deviation about the mean lateral position is shown as a function of range. In this statistic, the autopilot-coupled and hand-flown approaches are similar out to 7 nmi. From 7.2 to 8.6 m i , the autopilot-coupled approaches had a lower TNSE. Figure 3-46 of the 95% confidence limits of the standard deviation shows the extent of the difference.
150
1 Hand-Flown
0 5 10
Range (nmi) 15
57
Figure 3-43. The number of arrivals in the autopilot-coupled versus hand-flown approaches experiment.

100 I n
Q) Q)
E 0
0 >
U
= 5 0 -
I c
0 - .I
z Q) E I -50-
E
..II
t U
-1 00 - 3 E Q
0
0 .* .. 0
Q Hand-flown 0 Autopilotcoupled Qa
e
- 1 5 0 : . I . I . I . I . I . I . , . I . I ,
0 1 2 3 4 5 6 7 8 9 10
Range (nmi) Figure 3 4 . The mean centerline deviation of the autopilot-coupled and hand-flown approaches.
300 n Q) Q)
E 0 u 200 Q > Q)
U
= I
I
n 2
G
100 E 0
e 13
Q Hand-flown 0 Autopilotcoupled 1 3 p
13 Q
e 13
Q Hand-flown 0 Autopilotcoupled 1 3 p
13 Q
0 1 2 3 4 5 6 7 8 9 10
Range (nmi)
Figure 3-45. The standard deviation of the centerline deviation of the autopilot-coupled and hand-flown approaches.
5 8

Io 95% Hand-flown GI
e 95% of autopilot-coupled QQ rn
0 1 2 3 4 5 6 7 8 9 10 Range (nmi)
figure 3-46. The 95% upper and lower confidence limits on the standard daiation ofthe autopilot-coupled and handflown approaches.
To form an understanding of the performance of the more advanced autopilots available in aircraft being manufactured today, flight test, and simulated flight test data provided by the Boeing Company were examined [13]. The data consisted of the maximum lateral deviations relative to the extended runway centerline of B747-400 aircraft during ILS approaches. These data also represent the localizer tracking performance for the B757 and B767 aircraft.
The following conclusions may be drawn from the Boeing Company data. The maximum centerline deviation for each approach was highly dependent on the localizer intercept angle, and the distance from the centerline where the turn to final approach was started. Almost all of the approaches remained within 600 feet of the extended runway centerline after passing through the stabilization filter described in Section 4.3.2. One nmi past stabilization, all but four of the 668 simulated approaches remained within 200 feet of the extended runway centerline. The advanced autopilot tracking performance was much better than that observed in the Memphis experiment [12]. The Boeing Company data suggest that more advanced autopilots can provide significant reductions in localizer deviations.
3.4.5 Narrowed Localizer Beam Experiment
It is possible that the angular width of the localizer beam significantly influences the TNSE of the arriving aircraft. In order to assess any affects, an experiment was performed by the Memphis PRM group from July 1990 to March 1991. The localizer beams on 36R and 18L were narrowed from 4.3 degrees to 3.0 degrees. The beam widths on the approaches to 36L and 18R remained at
59

4.0 degrees. These beam widths were checked by the FAA flight inspection aircraft. A diagram of the experimental setup is shown in Figure 3-47.
\ I
18R
36L
Memphis narrowed localizer experiment, 14 Data collection sessions July 90 thru March 91
\ I \
t - 30- I I I I I I I I I I I I I I I I I I I i
J 18L
36R
Figure 347. Diagram of the localizer beam widths on the Memphis parallel runways for the narrowed localizer experiment.
There were a total of 14 data collection periods with 803 complete approach radar tracks. Forty-eight percent of the ILS arrivals were in IFR weather conditions, 47% were in MVFR weather conditions, and 5% were in VFR weather conditions. The aircraft were pnmanly in the large weight class, 90%. while 1% were heavy aircraft and 9% were aircraft weighing less that 12,500 pounds. The
60

TNSE of the small aircraft and the arrivals during VFR weather conditions were not studied in the following analysis.
For the analysis of the TNSE in this experiment, the data for the namwed localizer runways were combined as were also the approach data to the other two runways. This provided a simultaneous control for the experiment. The number of arrivals in each of the two groups is shown in Figure 348. The effect of the stabilization range filter is apparent by the plateau in arrivals inside 9.4 nmi except that the amval count for 36W18L has some degradation. The most probable reason for the fluctuation in arrival count is that there were many coasted tracks in the radar data on arrivals to 18L due to surveillance problems that existed during this data collection activity. (The coasts during a radar track were not included in the analysis database.) Figure 3 4 9 shows the amval count to each runway and Figure 3-50 shows the number of arrivals to 18L with also the number of coasts for the tracks in this data set. The number of coasts in a range bin added to the arrival count does not result in the expected plateau because there can be a coast and a target report for the same aircraft in one range bin. It was concluded, though, that the number of coasts explains the degradation in the amval count.
200
cn 150 0 > - .I L
2 O 100
$ E
c
P
3 z 50
0
3.0 deg (36R, 18L) e- 0 4.0deg (36L 18R) 0 0
6
I Q u
8" e
a IFR and MVFR weather conditions Heavy and Large aircraft types
P , , . , . . . . I , . . . 1 . . . . 0 5 10 15 20
Range (nmi)
Figure 3-48. The number ofarrivals in the narrowed localizer beam width experiment.

120 Q 36R
100 j . 18L 0 36L
rn i 18R
’ IFR and MVFR weather conditions
0 5 1 0 15 20 Range (nmi)
Figure 3-49. The number ofarrivals in the narrowed localizer experiment. Notice the “dip” in the number of arrivals to 18L.
1 00
UJ w 3 80
6 L 0
Q > UJ 60 - - L
40 2 r 0
aa L n E 20 a Z
0
. ~~
3.0 deg localizer be& to Memphis 18L IFR and MVFR weather conditions Heavy and large aircraft
* . . . Q
b
0 5 1 0 1 5 20
Range (nmi)
Figure 3-50. The number of arrivals and corresponding coasts to 18L.
62

Figure 3-51 shows the mean TNSE centerline deviation of the approaches with 3.0-degree and 4.0-degree localizer beams. The means intertwine over the range shown, and they stay within 150 feet of each other. Considering aircraft size, the means are operationally similar.
IFR and MVFR weather conditiins Heavy and Large aircraft types
3.0 deg (36R, 18L)
0 4.0 deg (36L. 18R)
-50
O i 0
4 w
-100 : . . . . , . . I . . . .
0 5 1 0
Range (nmi)
15
Figure 3-51. The mean TNSE centerline deviation as a function of range for the narrowed localizer approaches and their control.
The standard deviation of the TNSE lateral positions is shown in Figure 3-52. The standard deviation of the approaches to the narrowed ILS is either the same as the standard ILS or drops slightly below. In an effort to determine if these lower values are significantly different, the 95% confidence intervals for the standard deviation are examined. In Figure 3-53, there is a 95% probability that the standard deviation lies between the pairs of cuwes for each data set. Note that although the standard deviation curves depart from one another, the 95% confidence intervals do not totally separate. Therefore, it is concluded that there is insufficient evidence to say the TNSE with the narrowed localizer beam is smaller than the TNSE of the 4.0-degree arrivals.
63

800 IFR and MVFR weather conditions Heavy and Large aircraft types e
800 -
600 -
400 -
200 -
6l 3.0 deg (36R, 18L) Q
PI
0 : . . . . , . . . . I . . . . , . . . . 0 5 1 0 15 20
Range (nmi)
Figure 3-52. The standard deviation ofthe TNSE centerline deviation as a fwrction of range for the narrowed localizer approaches and their control. .
I3 1000 S 3.0 deg (36R, 18L) 0 4.0 deg (36L, 18R) 0 0
E P Q IFR and MVFR weather conditions Heavy and Large aircraft types
o ! . . . . , . . . . , . . . . I . . . . 0 5 10 1 5 20
Range (nmi)
Figure 3-53. The 95% confidence intervals for the standard deviation ofthe narrowed localizer beam am’vals and their control. The statistics are smoothed over 3 points for easier comparison.
64

To consider whether the amvals to each runway have their own character (Section 3.4.1). this report also compared the narrowed localizer amvals to amvals to the same runways prior to the localizer change. The width of the localizer beams before narrowing were 4.3 degrees. Figures 3-54 to 3-57 show this comparison. The mean lateral position on amval differed inside of 9.4 nmi (Figure 3-55). The 4.3-degree approaches were more towards the other runway by about 50 feet. The standard deviations of the 3.0-degree approaches were less than the 4.3-degree amvals (Figure 3-56) and significantly less between 4 nmi and 9.5 nmi and 11.5 nmi to 14 nmi (Figure 3-57).
1000 I
3.0 deg, 36R and 18L 1 0-z 6 4.3deg136Rand 18L
Cn 8 0 0 i Q) S 0 a 0 8 600 L
a
400
200
0
0 .. 0 0 0 0
6 t
0 5 10 1 5 2 0
Range (nmi)
65
Figure 3-54. Comparing the number arrivals to Memphis 36R and 18L when the localizer beam width was 3.0 degrees and43 degrees.

n
aa aa
E 0
0 > Q)
Q) E
Q)
E
w
= I Y
0
n
0 0
L
Y
3
r" E Q
loo I 50 1 0
-50
-1 00
3.0 deg, 36R and 18L 4.3 deg, 36R and 18L
0 5 10 15 Range (nmi)
Figure 3-55. Showing the diflerent mean lateral positions of the Memphis arrivals when the localizer beam width was 3.0 degrees and 4 3 degrees.
600
- 500- 0) aa
E 400- 0
Q
$ 300-
w
). v
I Y
I
n E Q 200- U E 0
5 100-
3.0 deg, 36R and 18L 4.3 deg, 36R and 18L
0 5 10 Range (nmi)
15
Figure 3-56. Comparing the standard deviations of the arrivals to 3.0degree and 43degree localizers.
66

700
4 3.0deg,36Rand18L 4.3 deg, 36R and 18L
Q)
5 4
6 0-
0 : . . . . , . . I . ’ . .
0 5 10 Range (nmi)
15
Figure 3-57. The 95% confidence limits on the standard deviation of the 3.0degree and 43degree arrivals.
3.5 COMPARING THE CHICAGO AND MEMPHIS ARRIVALS
At Memphis, a l l amvals to the parallel runways during IMC use dependent parallel approach procedures. In order to assess potential effects that may be different during independent ILS approaches, independent arrival data were collected by the FAA Technical Center (FAATC) at Chicago’s OHare International Airport. The data collection methods used in the FAATC study are described in the report “Chicago O’Hare Simultaneous JLS Approach Data Collection and Analysis” [14]. The Chicago data set conditions are considered similar enough to the Memphis conditions for a satisfactory comparison.
The Chicago O’Hare data that were utilized in this report consisted of large air carriers conducting simultaneous amvals to parallel runways. Of the 3,197 aircraft final approaches recorded, 79% were the large air carriers (2,526 amvals). The data from ten parallel runways are combined so that a positive deviation is towards the other parallel runway.
Most of the data (95%) were recorded in IMC. Table 3-6 shows the weather conditions for all of the FAATC Chicago data collected. The few amvals that arrived in MVFR weather conditions are indicated. This is not viewed as a problem due to the low number in MVFR weather conditions.

Table 3-6
Weather for Chlcago OHare Arrlvals Data Collection
3.5.1 Localizer Acquisition Filter Approximation
The Chicago data were fdtered for localizer stabilization in a different method than the Memphis data in this report. A summary of that method follows derived from the pseudo-code in the Appendix D of [14]. The Chicago data amved at MIT Lincoln Laboratory filtered, so it was necessary to adapt the FAATC filter and use it on the Memphis data in order to compare the two groups on similar ground.
The FAATC localizer stabilization filter examined each aircraft track, starting at the outer end, for a horizontal position within 500 feet of the extended runway centerline. Once that point was found, the next 3 nmi toward the runway were examined. If the aircraft did not cross the centerline and travel more than 1,OOO feet from the centerline, then that point was saved. Otherwise, the algorithm was repeated until those conditions were met. Also each aircraft track was searched for where level flight changed to descent. If the deviation point from above was between the runway and the change to descent, then that was where the track was said to be stable on the localizer. If the deviation point was beyond the descent point, then the average is taken of the two ranges, and if the deviation is 500 feet or less at that point, then the average is the stabilization point. Otherwise the track was searched inbound from the average to no further than the descent point and if a deviation of 500 feet or less is found, that is the stabilization point.
The Chicago data also were subjected to a range filter. The technique used in this report included a track for analysis if the stabilization point occurred at or before where altitude separation was lost based on the glide slopes (Section 2.3.2.3.5). The value used with the Chicago data was 10.5 nmi. However, it should be noted that the approaches into ORD are at 5,000 and 4,000 feet which means that the aircraft following the glide slopes loose altitude separation at 15.7 nmi.
68

3.53 Adaptation of FAATC Filter to Memphis Data
Upon examining the FAATC localizer stabilization filter, the decision was made not to use the altitude as part of the algorithm. At Chicago 0- the anivals are at 5,000/4,000 feet so the altitude separation between the parallel arrivals is lost at 15.7 nmi. The core of the arrival data starts at 12 m i so all of the aircraft should be descending in the track data that are available. Therefore, in the adaptation of the FAATC filter, only the horizontal part of the algorithm was used. This means each aircraft track was examined starting at the outer end for a horizontal position within 500 feet of the extended runway centerline. Once that point was found, the next 3 nmi toward the runway were searched. If the aircraft did not cross the centerline and travel more than 1,OOO feet from the centerline, then that point was declared the place that localizer stabilization began. Figure 3-58 shows a set of Memphis approach data passed through each of the localizer stabilization filters. The standard deviations do not significantly differ inside of the 9.4 m i range filter, as would be expected. Note that MIT Lincoln Laboratory filter is more conservative and reflects the angular nature of the localizer beam.
. 500 - Memphis arrivals with MIT LL filter
400 -
300 -
200 -
100 -
rP Memphis arrivals with FAATC filter
o ! . . . . , . . I . . . .
I
0 5 10 Range (nmi)
1 5
Figure 3-S8. Comparing the MIT Lincoln Laboratory and FAATC localizer stabilization filters on the Memphis IFR weather conditions, heavy and large aircrqft data.
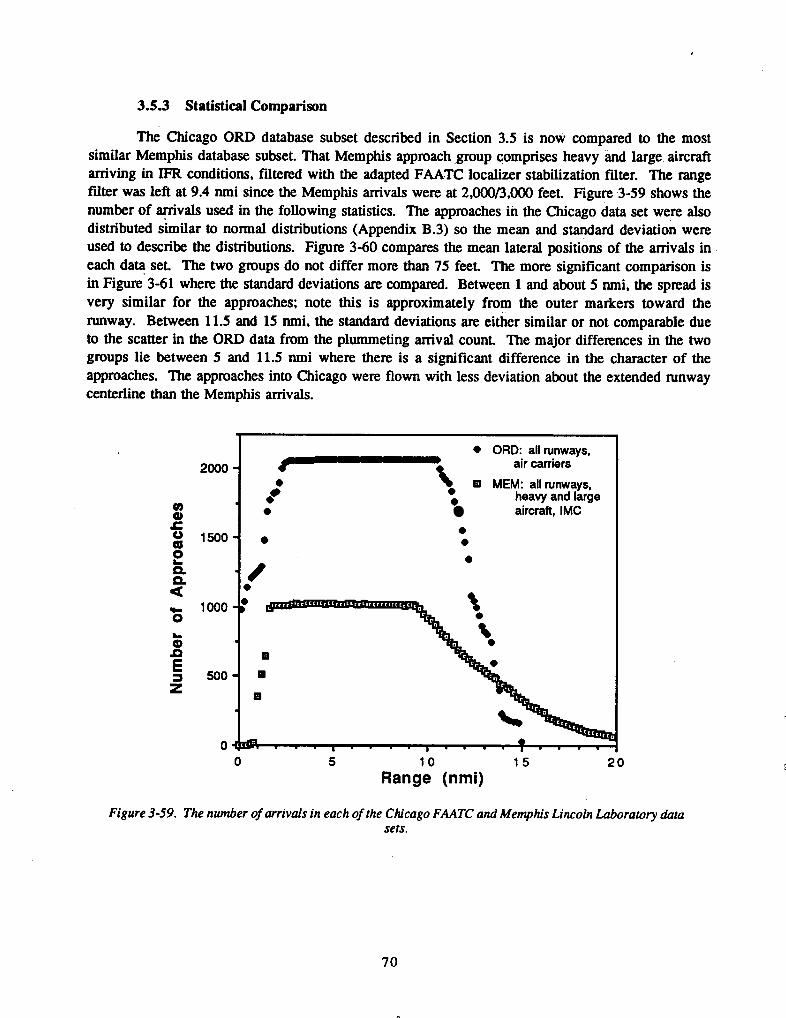
3.5.3 Statistical Comparison
The Chicago ORD database subset described in Section 3.5 is now compared to the most similar Memphis database subset. That Memphis approach group comprises heavy and large aircraft arriving in IFR conditions, filtered with the adapted FAATC localizer stabilization filter. The range filter was left at 9.4 nmi since the Memphis amvals were at 2,000/3,000 feet. Figure 3-59 shows the number of arrivals used in the following statistics. The approaches in the Chicago data set were also distributed similar to normal distributions (Appendix B.3) so the mean and standard deviation were used to describe the distributions. Figure 3-60 compares the mean lateral positions of the amvals in each data set. The two gmups do not differ more than 75 feet. The more significant comparison is in Figure 3-61 where the standard deviations are compared. Between 1 and about 5 nmi, the spread is very similar for the approaches; note this is approximately from the outer markers toward the runway. Between 11.5 and 15 nmi, the standard deviations are either similar or not comparable due to the scatter in the ORD data from the plummeting amval count. The major differences in the two groups lie between 5 and 11.5 nmi where there is a significant difference in the character of the approaches. The approaches into Chicago were flown with less deviation about the extended runway centerline than the Memphis amvals.
cn L
0 ORD: allrunways, air carriers 2000
a 0 0 15004 0
1000
500
0
s MEM: all runways, heavy and large 0
0 aircraft, IMC
0 0
0
L . . . I . . . . , . . . . t . . . . 7 0 5 10 1 5 2 0
Range (nmi)
,
JI
Figure 3-59. The number of arrivals in each of the Chicago FAATC and Memphis Lincoln Laboratory data sets.
7 0 I

n
Q) Q) = E 0
Q >
c
I c I
Q) C
Q)
E
.II I
L
c
6 E 0
5 0 , MEM: IFR, Heavy and Large aircraft, FAATC filter
0 ORD: IFR, Air Carriers, FAATC filter
0
El
25
0 -
-25
-- EP I
5 10
Range (nmi) 15
Figure 340. Conparing the mean centerline deviation of the approaches to Memphis and Chicago. The data from the direrent runways were combined such that the parallel runway is in the positive direction.
400
n
0) Q) = E 0
Q > 0)
Y
300 - Y
I
n 200
2 Q 'ZI E
100
0 0
0 I Q MEM: IFR, heavy and large aircraft, FAATC filter I
I 0 ORD: IFR, Air Carriers, FAATC filter
I I I I I
5 10
Range (nmi) 15
Figure 3-61. Comparing the standard deviation about the mean centerline position in the Memphis and Chicago arrivals.
71

The difference in the TNSE between the Chicago and Memphis arrivals motivated a study of possible contributing factors. In 1959 a study was made on the accuracy of ILS approaches at 10 different airports, and the following quote was in the report summary. “The results of this study have indicated that although it is possible to make general statements about the accuracy of ILS approaches, each airport must be treated as an individual and unique entity unto itself.” [ll] Differences in the airports, excluding the independentldependent ILS arrivals, are the runway separations, geographic and aeronautic differences, localizer beam widths, and aircraft mix. The localizer beam widths and the aircraft mix were studied further in this report.
’
The localizer beam widths in Chicago, shown in Table 3-7, were obtained from Aviation National Standards in Oklahoma City. The average beam width, weighted by the number of recorded amvals, was 3.72 degrees. The weighted average Memphis localizer beam width was 4.14 degrees. This is only a difference of 0.42 degrees. From the Memphis narrowed localizer experiment results (Section 3.4.9, where 1.3 degrees made only a small difference, one would conclude that the localizer beam widths are not a contributing factor to the Chicago-Memphis TNSE differences.
Table 3-7
Chicago OHare Localizer Beam Widths
A more likely contributing variable to the Chicago-Memphis TNSE differences is the difference in the types of aircraft in each database. The results of Section 3.4.3 are that some aircraft consistently have smaller or greater TNSE than the general population of aircraft The following analysis examined the types of aircraft in the Chicago data and how that could contribute to the differences seen.
The recorded Memphis approaches were primarily DC9s and B727s. as was shown in Figure 3-3. The recorded Chicago ORD arrivals showed a different mix (Figure 3-6). Since the main causal effect may be whether the cockpit equipment is a newer or older generation, Table 3-8 shows the generation type breakdown for the aircraft in the Memphis and Chicago databases. The unknowns in the table were the B737s which could be either old or new generation equipment. If the B737s are split evenly, the Chicago arrivals would have been 70% old style and 30% newer and the Memphis arrivals would have been 83% older, 17% newer. The comparison of the TNSE of the
-
- ”
72

B727 and B757 in Section 3.4.3.4 imply that the age of the equipment is an important variable, but the Section 3.4.3.5 did not show that the generation of aircraft is significant across a mix of manufacturers. Therefore, the age difference portrayed in Table 3-8 is not sufficient to explain the Memphis - Chicago O'Hare TNSE differences.
The TNSE difference may also be due to the fact that the Memphis arrivals were dependent and staggered and the Chicago ORD amvals were independent approaches, although there is no documented evidence that supports this hypothesis. Finally, it is possible that Chicago approaches were more stable in the 6-1 1 nmi region, This would have been because the Chicago amvals join the final approach course further out which provided the pilot or autopilot more time to establish a stable track on the localizer. Some combination of this and the other factors above is the likely reason for ' the reduced TNSE at Chicago O'Hare.
Figure 3-62. Chicago O'Hare data collection aircrqft distribution. 1141

Table 3-8
8737, 17.3 2.1 either old or new
J
Dlstrlbutlon of Newer and Older Alrcraft In Memphis and Chicago Data
74

4. CONCLUSIONS
The major results of the PRM study of the TNSE (total navigational system error) during final approaches into Memphis International include a characterization of the general pattern of approaches, its impact on an NTZ, and the effect of different variables - weather, aircraft type, and airport. Three comparisons, where significantly smaller TNSE were found, were between the arrivals in IFR and MVFR weather conditions, between B727 and B757 arrivals, and between Memphis and Chicago approaches. A summary of all of the analysis follows.
The general character of the lateral deviations for the sample of Memphis approaches approximated a normal distribution with some extra central peakedness and slightly thicker tails. Close to the runway thresholds, the distribution has a standard deviation of less than 70 feet. The spread increases nearly linearly so that by 10 nmi away from the runway, the standard deviation is around 350 feet. With this distribution of the approaches, if there were independent amvals, some aircraft would be in the NTZ. If the parallel runways were less than 3,400 feet, a significant number of aircraft would enter the NTZ (see Figures 3-6 and 3-8).
The first variable studied was the specific runways, which is still part of the description of the character of the approaches. Each runway had its own pattern of amvals. The differences were mostly in the mean lateral positions. There was not a significant difference in the standard deviations of the arrivals.
The weather conditions had a significant effect on the arrivals only when comparing the difference in spread of lateral deviations during approaches in MVFR and IFR weather conditions. Although relatively significant, this still means only a 175-foot difference in the total spread at 10 nmi. However, when the crosswinds were high (>11 knots), the trend of the approaches were more laterally scattered and when comparing low IFR to high IFR amvals, the low IFR amvals flew more tightly.
There were many permutations in the comparisons of the TNSE of different aircraft and aircraft gmups. The weight classes did not show differences in TNSE. The general aviation amvals did not show differences either. When the DC9, B727, SF34, and BA14 amvals were compared, only the BA14 approaches demonstrated a different TNSE, having an increased standard deviation between 3 and 10 nmi. The B727 and B757 amvals were compared to each other, assuming that they represented one manufacturer's different generation autopilot systems. The B757 had significantly smaller TNSEs than the B727; the standard deviations differed by 70 feet between 5 and 9 mi. However, this difference was not apparent when all aircraft were divided into two generations (old and new) and compared. Also, there was no significant difference in the TNSE when aircraft that were hand-flown were compared to aircraft known to be using B727 generation autopilots.
One other variable studied in Memphis was the effect of the localizer beam width. In a controlled study, the approaches to two runways had localizer beam widths of 3.0 degrees and the other two localizers were set at 4.0 degrees. There was no significant difference in the TNSEs of these two sets of approaches. There was a small narrowing of the TNSE spread in the 3.0-degree approaches when they were compared to approaches to those two runways from before the beam was narrowed (from 4.3 degrees).
75

The data from Memphis were also compared to the approaches recorded by the FAATC into Chicago OHare Airport. Inside of 6 mi, the two groups of arrivals behaved similarly as compared by their means and standard deviations as a function of range. Between 6. and 11 nmi, the approaches into Chicago had a significantly smaller spread than the Memphis approaches. The standard deviations differed by 50 feet between 6 and 11 m i . The mix of aircraft differs between Chicago and Memphis, which may contribute to the difference though this is not well supported by the Memphis studies. Another difference in the amvals is that the Memphis approaches were dependent and the Chicago amvals were independent, but data does not exist that explicitly quantifies this effect. Finally, the longer frnal approaches at Chicago afford those aircraft more time to stabilize on the localizer, which would also contribute to smaller TNSEs.
76

5. RECOMMENDATIONS
There are two categories of recommendations for further work in this subject: 1) further analysis on the Memphis PRM data, and 2) more data collection. In the area of more study on this report's data, it is recommended that the overshoots on ILS acquisition be studied. It is likely that the angle and range of ILS acquisition affect the TNSE as well as the size of the localizer overshoots. It is also recommended that individual tracks be characterized for simulation purposes in risk analyses.
In the area of more data collection, it is recommended that the FAA continue gathering TNSE data at periodic intervals at a number of airports to track changes and understand differences and trends. As this report shows, evolving aircraft distributions and different airports affect the TNSE. If independent amvals are conducted at 4,300 feet or less, it is recommended that data be collected to compare to the dependent amvals at Memphis. Also, it is recommended that additional data be collected on ILS amvals beyond 12 m i . (In this regard, the FAA has begun a study in Los Angeles, California.)
77


APPENDIX A
The Memphis database had eight types of primary raw-data tables and one central summary
The time formats are DD-MON-YYYY HH24:MI:SS unless otherwise noted.
a) The PRM-LOGBOOK MISSION
table. This appendix contains the field descriptions of these RDMS tables.
The unique mission identifier for the data collection session. AIRPORT SYS-START System start time. SYS-STOP System stop time. VAXO-TAPE VAXO-FILE VAX 1-TAPE VAX1-FILE SOFTWARE PCRM display software version. AUDIO-TAPE Audio tape identifier. AUDIO-START Audio start time (DDD:HH24:MI:SS). AUDIO-STOP Audio start time (DDD:HH24:MI:SS). METER-START Audio meter start setting. METER-STOP Audio meter stop setting. CLASS
TYPE CONDITION
b) The PRM-NOTES MISSION AIRPORT m M E The observation local time. TRACK Target AMPS track number. TAG CODE Target mode-A code. EVENT
c) SENSOR MISSION SITE KAFt
The airport for this mission (e.g., MEM).
Digital tape identifier for recording from VAX #OO.
Mission digital tape file number for VAX #OO.
Digital tape identifier for recording from VAX #Ol. Mission digital tape file number for VAX #O1.
The general class of data (ARRIVAL or DEPARTURE). Type of data collection (e.g., DATA, UN/COUPLED, etc). The general weather condition (ILS,UNK,VFR, VMC).
The unique mission identifier for the data collection session. The airport for this mission (e.g., MEM).
Target ARTS flight tag (e.g., NWA9876).
The 132 character unstructured space for operator comments.
The unique mission identifier for the data collection session. The AMPS radar site (e.g.. MEM or MODSEF). Use of AMPS Keep All Replies parameter (yes or no).
79

KAT NRT PRF MAX-RANGE FIRST-SECTOR LAST-SECTOR UPDATE-RATE ANTENNA ENV-FILE LA=-CAL
d) WINDS-ALOFT MISSION STATION FIRST-USE LAST-USE MSL SPEED DIR TEMP
Use of AMPS Keep All Targets parameter (yes or no). Use of AMPS Non Real Time parameter (yes or no). A M P S Pulse Repetition Frequency (pulses per second). Maximum AMPS range (nautical miles). The first active AMPS radar sector (1 to 16). The last active AMPS radar sector (1 to 16). The radar surveillance update period (2.4 or 4.8 sec.). Single face or back to back operation. AMPS environment fde identifier. The date of the the last calibration
The unique mission identifier for the data collection session. Station identifier. Greenwich mean time for first use. Greenwich mean time for last use. Altitude of measurement in feet, from mean sea level. Wind speed in knots. Direction of wind from true north. Air temperature in degrees Centigrade.
e) SURFACE-REFQRT MISSION m M E RPlTYPE TEMP DEW-POINT WlND-DJR WIND-SPEED LOCAL-PRESSURE SEA-PRESSURE ALTIMETER ACCUM-PRECIP WEATHER SURFACI-VIS TOWER-VIS PIREPS
The unique mission identifier for the data collection session. Report time in local standard time. Weather report type (regular hourly report or a special report). Air temperature in degrees Fahrenheit. The dew point temperature in degrees Fahrenheit. Direction of wind from true north. Wind speed in knots. Atmospheric pressure in inches of Hg. Sea level pressure in milli bars. Local altimeter setting in inches of Hg. Accumulated precipitation in inches. The coded weather description. The visibility as seen from the surface in nautical miles. The visibility as seen from the tower in nautical miles. The coded pilot weather reports.
80

STATION PE AK-SPEED WINDTYPE
f ) SKY-REPORT MISSION m M E STATION RPlTYPE METHOD TYPE HEIGHT OBSCURED WEATHER
g) CEILOMETER MISSION m M E SENSOR STATUS AIRPORT LAYERS HEIGHT THICKNESS
The originating station of this report. The peak gusting wind speed in knots. Generally NULL, otherwise GUSTS.
The unique mission identifier for the data collection session. Report time in local standard time. Station identifier. Weather report type gular hourly report or a special report). Method used to determine the cloud layer height. Amount of cloud cover (e.g. broken, overcast, scamred, clear). Cloud layer height in feet. States whether the sky is PARTLY or COMPLETELY obscured. Short-hand weather report (e.g,. F=fog, R=rain, T=thunderstom).
The unique mission identifier for the data collection session. Report time in local standard time. Unique ceilometer identifier, 1,2,3, or 4.
The ceilometer alarm status.
Unique airport identifier. The number of the cloud layers; 0, 1, or 2. Cloud layer height above the ground, in feet. Cloud layer thickness in feet.
h) The M E M M table m M E AMPS surveillance report time.
c
HITIME LOTIME RUNWAY AIRLINE FLTNO ACl'YPE TRKNO ACODE ACONF ALTYF'E
RPTTIME's high order word of the 64 bit VAX rpttime. RF'lTIME's low order word of the 64 bit VAX rpttime. ARTS runway assignment (e.g., N for 36R).
Air camer portion of the ARTS flight id (e.g. NWA). Flight number portion of the ARTS flight id. ARTS aircraft type information (e.g., B727). The AMPS assigned or PRM modified AMPS track number. The Mode A transponder code. The Mode A code bit-wise confidence. Mode C altitude report type (e.g., garbled or no Mode C)
81

ALTCONF Mode C altitude confidence. SPECBITS AMPS special status bits. SLRANGE ALT AZIMUTH BLDSTAT PRM blunder status bits. CONFLICT1 CONFLICT2 CONFLICT3 STAMP
(i) PRMNPROACHES AIRPORT The airport identifier. MISSION AIRLINE FLTNO ACIYPE RUNWAY TRKSTART TRKSTOP FLTRULES OUTERMARKER
Radar slant range in nautical miles. Mode C transponder altitude report. Radar azimuth, degrees from true north.
TRKNO of first conflicting aircraft. TRKNO of second conflicting aircraft. TRKNO of third conflicting aircraft. Analyst validation stamp (good, bad, ARTS edited, overflight).
The unique mission identifier for the data collection session. The air-carrier portion of the flight id. The flight number portion of the flight id. The ARTS data aircraft type (e.g., DC9). The ARTS data runway assignment. The earliest valid report time for the aircraft. The latest valid report time for the aircraft. The weather defined flight rules (IFR, MVFR, VFR). The earliest valid report time after the aircraft passes the marker.
82 1

APPENDIX B
It is useful to know whether the amvals are approximately normally distributed or not. When they are normal (or gaussian), the mean and standard deviation completely define the data distributions. This provides a reliable and simple method with which to compare groups of data.
Goodness-of-fit tests were not used to evaluate whether or not the approaches had gaussian distributions. This was because “whenever the sample size is large almost any goodness-of-fit test will result in rejection of the null hypothesis. It is almost impossible to find data that are exactly normally distributed. For most statistical tests, it is sufficient that the data are approximately normally distributed.,, [ 161
The distributions of the amvals were examined in three groups. The first set studied the lateral deviations’ of the combined arrivals to the Memphis runways 36L/R, 18L/R at three ranges: 2,s and 10 m i . The second set is the TNSE data to each of the Memphis runways at four ranges: 2,5, 10 and 15 m i . The third set examined the Chicago approach lateral deviations at four ranges: 2.1, 5.2, 10.2, 14.85 nmi. It is assumed that the approach data in between the studied ranges was distributed similarly.
The normalcy of the first two sets of data were checked by plotting the deviation about the extended m w a y centerline on a nonlinear probability scale. If the data are gaussian, the points will lie approximately on a straight line [17]. The normalcy can be further evaluated by the value of the skewness and the kurtosis of the distribution [18]. The Chicago data were evaluated by comparing the lateral deviations to gaussian distributions.
B.l MEMPHIS COMBINED RUNWAY ANALYSIS
The lateral positions of the measured Memphis amvals to the four parallel runways were combined together. The first and more extensive analysis is of the combined approaches in IMC. That is followed by analysis of the amvals during MVFR weather conditions. In both data sets, the aircraft are greater than 12,500 lbs.
The Memphis IMC final approach data are for almost 1,OOO aircraft. The deviations at 2, 5 and 10 nmi are shown in Figures B-1 through B-3. (The reported kurtosis values have had three subtracted.) The measured Memphis amval distributions are approximately normal. The deviations from normal are primarily in the tails of the distribution and some extra central peakedness.
At 2 nmi (Figure B-1) the skewness value indicates a 95% probability that the distribution is normal, but the kurtosis value indicates that the distribution is more peaked than a normal distribution. When the data beyond f180 feet from the mean are removed (2% of the data at 2 nmi), the kurtosis becomes 0.157, indicating a 99% probability that the kurtosis is normal.
At 5 nmi (Figure B-2a) the distribution does not appear normal. When the data beyond f370 feet from the mean are removed (2% of the data at 5 nmi), the distribution becomes normal (Figure B-2b). The skewness is -0.051 and the kurtosis becomes 0.286, both of which are within 99% probability of normal.
At 10 nmi the distribution is about normal except for the tails (Figure B-3). The skewness value is within 99% probability of normal. When the data beyond 790 feet to either side of the mean centerline deviation are removed (3% of the data at 10 nmi), the kurtosis (0.310) also goes to 99% probability of normal.
83

300 I I I 1 I I I I I I I 1 I
lr! #/:11 I , I , I I I I I
Mean = -18 feet
100 1 Kurtosis = 1.80 N = 968 arrivals
n U *O0 St.dev.=73 Q) Q)
E 0 Q >
Q)
Q) s -300 7 0
-400
Skew = -0.20
/- - u 0 : -
;t 3
p" -100 - = - -200 L
U
Figure B-I . Memphis IFR approach centerline deviations at 2 nm' plotted on a normal probability plot.
-
; 800
600 n U
8 400 = 200
0
-200
-400
-600
I I I I I I I I I I I I I
-* - - Mean = -29 feet - - Skew = 0.35 -
St. dev. = 144
K~rtOsis = 3.14 - N = 982 arrivals -
- -
- -
- - . -800 1 I I t
I , I , I I t I I I I
.01 .1 1 5 10 2030 50 7080 90 95 99 99.999.99
Percent
Figure B-2a. Memphis IFR approach centerline deviations at 5 nni plotted on a normal probability plot.
84

400 i 1 I I I I I I I I I 1 I I I c -
- - - - - -
n
Q) Q) = U
Mean = -31 feet r i St. dev. = 121 Skew = -0.05 Kurtosis = 0.29 N = 958 arrivals -
s /- x -
z - -
rf ls- -
E 0 Q w
I c. I
8
1400 I
- Mean = -56 feet 1000 - St.dev.=327
- Skew = -0.09 6oo Kurtosis= 1.28
N=939anivals
I I I I I 1 I I I I I I
n a Q)
E 0
Q >
Q)
E -600 -
U
a c. 200 - - 8 -200 -
3 5 -1000 -
I
M
0 -1 400 I I I I I I I I I I I I I
300
200
100
0
-1 00
-200
-300
-400
-
-
- - -
-
Figure B-2b. Memphis IFR approach centerline deviations at 5 nm' plotted on a normal probability plot with the data beyond B70 feet from the mean removed.
85
Figure B-3. Memphis IFR approach centerline deviations at 10 nm' plotted on a normal probabiliry plot.

The distributions of the Memphis amvals in MVFR weather conditions were also reviewed. Figure B-4 show the normal probability plots for the data at 2, 5 , 10 and 15 nmi from the runway thresholds. The deviations about the extended runway centerline are very nearly linear at all four ranges. At 15 nmi the tails of the distribution start to deviate from normal, but also the sample size drops from over 900 to 258 amvals. Over all, the amvals in MVFR weather conditions are distributed about the centerline with a gaussian like distribution.
86
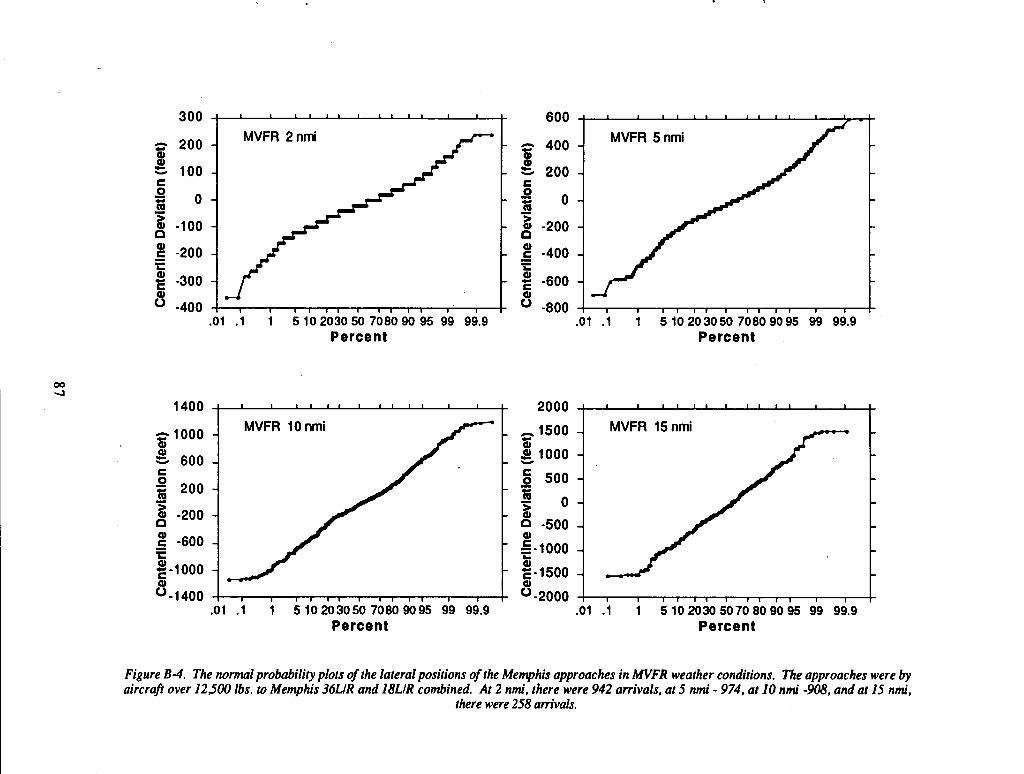
2 200 Q)
8 100 E 0
0 = o
-100 n -
-400
1400
= 1000
s 600
= 200
a
C 0 (II
>
a
I
g -200
c -600 -
MVFR 2 n d
.01 .l 1 5 10 2030 50 7080 90 95 99 99.9 Percent
- 400 z - s 200 - = 0 0 C
(0
0
- - -200
- -400 - - 8 - E -600
- -800 Q)
I 1 I
I I I I I I I I I I I I 1 I
MVFR 10 nmi
I I I I I I I I I I I I I I I I I
.01 .1 1 5 10203050 70809095 99 99.9 Percent
2000
I I I I I 1 1 1 1 1 I I I I 1 I I
.01 .l 1 5 10 203050 7080 9095 99 99.9 Percent
I I I I I I I I I I I 1 1 I I I I
j- MVFR 15nmi
500
g -500
- w 0 s o
E 4 0 0 0 Q)
I I I I 1 1 1 1 1 I t 1 1 I I I 1
.01 .1 1 5 1020305070809095 99 99.9 Percent
Figure 8-4. The normal probability plots of the lateral positions of the Memphis approaches in MVFR weather conditions. The approaches were by aircrafr over 12500 lbs. to Memphis 36LIR and 18LIR combined. At 2 nmi, there were 942 arrivals, at 5 nmi - 974, at 10 nm' -908, and at 15 nm',
there were 258 am'vals.

B.2 MEMPHIS INDIVIDUAL RUNWAY ANALYSIS
The lateral distributions of the Memphis final approach data for each parallel runway were also studied. The approaches were by aircraft greater than 12,500 lbs. arriving in IFR weather conditions. Again, the ranges of 2, 5, 10 and 15 nmi from the runway threshold were chosen to represent the amvals. The deviations from the extended runway centerlines are shown in normal probability plots in Figures B-5 to B-8. Overall, there is good agreement in the plots that the amvals are distributed normally about the centerline. As with the combined data in Section B.l, the deviations from normal are primarily in the tails of the distribution. These deviations from normal tend to be on the side that is towards the other parallel runway (a positive deviation).
88

68
,Cen
terli
ne D
evia
tion (
feet
) P
O&
nr
;3
1U
Cn
OP
&
A
AA
00
00
00
00
0
00
00
00
0
9 :
-
I I
I 1
I I
1 I
I I
,Ceq
teri(
ne D
evia
tion (
feet
) W
PO
&n
r;
3~
Cn
OP
A
AA
A
A
00
00
00
00
0
00
00
00
00
0
9 --
A-
A-
m-
A
0-
N,
0
0-
0
VI-
0 4
0-
m
- 0
(D
-
0
to-
m
to,
to
(0 E-
t
Cen
teril
ne D
evia
tion
(feet
) &
A
&N
O
00
0
00
0
00
00
0
Cen
terli
ne D
evia
tion
(feet
) &
&A
I6
I
uP
Q)
W
00
00
0
00
0
00
00
00
00
0

06
Cen
terl
ine
Dev
iati
on (f
eet)
A
2
A
PO
cn
r6
Nc
nO
0
00
00
00
0
00
00
00
Cen
terl
ine
Dev
iati
on (f
eet)
A0
br
;n
ac
nO
P
4d
I
I
dd
00
00
00
00
0
00
00
00
0
'I
I 1
I 1
I 1
I I
I I
Cen
terl
ine
Dev
iati
on (f
eet)
b
Gh
I.
A
h3
0
00
00
0
00
0
00
00
00
0
I I 1
I I
I I
I I I
Cen
terl
ine
Dev
iati
on (f
eet)
b
br
;
NP
cn
Q)
0
00
0
00
0
00
00
00
00
9 -y------
A

16
?
Y
,Cen
terli
ne D
eviat
ion (f
eet)
4.
A
Nd
ob
*
ah
)
00
0
00
0
00
00
00
0
.Cer
Mer
line D
eviat
ion (f
eet)
dd
ro
u
lo
ul
o
00
00
0
00
0
00
00
00
0
I.
A
d
vl
oi
n
VI
0
-.
Cen
terlin
e D
eviat
ion (f
eet)
kl
.
dh
)O
0
0
00
0
00
00
00
W
W w :I C
enter
line
Dev
iation
(fee
t) b
ir
j
wu
pm
0
00
0
00
0
00
00
00
Si
I I
I I
I
t A-
-.-
VI-
0-
h)_
A
'0 8-
3 a
- 5 :-
no
(P
0)-
0
(0
-
0
W-
V
I
(0
-
0
W 2-
I
I
I I
I I
I I
,.

11
26
A
,Cen
terl
ine
Dev
iati
on (f
eet)
A
.
Nd
ob
P
Q)
N
00
0
00
0
00
00
00
0
I I I
I I
I I
I I
,Cen
terl
ine
Dev
iati
on (f
eet)
d
-A
d
00
0
00
00
0
00
00
00
0
Nd
pi
P
CQ
NQ
) t
Cen
terl
ine
Dev
lati
on (f
eet)
Cen
terl
ine
Dev
iatl
on (f
eet)
6
ik
N
PQ
)
00
0
00
0
00
00
00
0

B.3 CHICAGO O'HARE ANALYSIS
The distributions of the Chicago O'Hare final approach lateral positions were also studied. The data set is the same as the one in Section 3.6. The data are a combination of air camer anivals to 10 different parallel runways in IMC. The centerline deviations were examined at four ranges chosen for similarity to the Memphis analysis: 2.1, 5.2, 10.2, 14.85 m i . Because of the way that the Chicago data were configured, the population of arrivals were evaluated by comparing the lateral deviations to gaussian distributions of the same mean and standard deviation. It can be seen in Figures B-9 through B-12 that the normal curves fit the arrival data distributions very well.
2!
-500 -400 -300 -200 -100 0 100 200 300 400 500
Centerline Deviation (feet)
ORD anivals at 2.1 nmi
Mean I -22 feet St. Dev. I 84 feet 1903 approaches 95% IFR Air Carriers Range filtered from 10.5 nmi
Final approach data, all runways combined
*ooopI Theoretical Gaussian distribution
Figure B-9. The lateral distribution of the Chicago arrivals at 2.1 nm' compared to a gaussian curve with the same mean and standard deviation.

0.08
0.06
0.04
0.02
DRD anivals at 5.1 nmi
Mean = -1 5 feet St. Dev. = 133 feet 2070 approaches 95% IFR Air caniers Range filtered from 10.5 nmi
Final appmach data, all runways combined
Theoretical Gaussian distribution
0.00 -1 000 -500 0 500 1000
Centerllne Deviation (feet)
Figure B-IO. The lateral distribution of the Chicago arrivals at 5.1 nm’ compared to a gaussian curve with the same mean and standard deviation.
94

0.05
0.04
* 0 E Q) 3 0.03 U
LL
Q)
Q
s! I * 0.02 c - P
0.01
0.00
ORD anivals at 10.2 nmi
Mean I -26 feet St. Dev. = 241 feet 2070 approaches 95% IFR Air camers Range filtered from 10.5 nmi
Rnal approach data, all funways combined
IRA Theoretical Gaussian distribution
-1500 -1000 -500 0 500 1000 1500 Centeriine Deviation (feet)
Figure B-11. The lateral distribution ofthe Chicago am'vals at 102 nm' compared to a gaussian curve with the same mean and standard deviation.
95

ORD arrivals at 14.85 nmi
Mean -1 1 feet St. Dev. = 219 feet 161 approaches 95% IFR Air carriers Range filtered from 10.5 nmi
Final approach data, all runways combined
-. Theoretical Gaussian distribution
-1 500 -1 000 -500 0 500 1000 1500
Centerllne Devlatlon (feet)
Figure B-12. The lateral distribution of the Chicago arrivals at 14.85 nmi compared to a gaussian curve with the same mean and standard deviation.
I-
:'
96

"
APPENDIX C
AIRCRAFT TYPE DESIGNATORS [151
DESIGNATOR NAME MANUFACTURER CATEGORY * d
(between 12,500 and 300,000 pounds)
AT42 B727 B737 B757 BA14 BA31 BA46 DC9 DC87 FK27 FK28 m80 SF34 SHD6
ATR 42 Boeing 727 Boeing 737
Jetstream 31 Jetstream 31 BAC 146/200 Nightingale/sky train II Super DC-8 70 Friendship F27 Fellowship
SF 340 Model 360
Boeing 757-200
DC-9/80
Aerospatiale Aexitalia Boeing Company Boeing Company Boeing Company British Aerospace British Aerospace British Aerospace McDonnell-Douglas McDonnell-Douglas Fokker BV VFW Fokker
Saab/Fairchild Short
McDonnelt-Douglas
Heavv Aircraft (300,000 pounds or more)
B767 Boeing 767 Boeing Company DClO DC- 10 McDonnell-Douglas
Multi-engine turboprop Civilian turbojet Civilian turbojet Civilian turbojet Multi-engine turboprop Multi-engine turboprop Civilian turbojet Civilian turbojet Civilian turbojet Multi-engine turboprop Civilian turbojet Civilian turbojet Multi-engine turboprop Multi-engine turboprop
Civilian turbojet Civilian turbojet
97

I

APPENDIX D
CRM
Range 4200 m 7800 m
ICAO (International Civil Aviation Organization) sponsored a study in the 1970's of the distributions of approaches in order to define terminal instrument approach procedures for ILS landings. A result of that work is the Collision Risk Model (CRM). There are three ranges from the runway threshold that are used by the CRM to define lateral distributions [19]. The Memphis PRM data overlaps with the outer two distances. The Memphis PRM heavy and large aircraft approaches in IFR weather conditions are compared with the CRM distribution statistics in Table D-1. The Memphis arrivals had narrower standard deviations and larger kurtosis values than the CRM. To illustrate the Memphis arrival lateral distributions at the CRM ranges, Figures D-1 and D-2 show the Memphis PRM data with normal curve overlays of the Same mean and standard deviation as the data.
CRM Standard CRM PRM Range PRM Standard PRM Deviation Kurtosis Devlation Kurtosis
35.9 m 4.3 4074 - 4445 m 24.0 m 5.9
67.5 m 4.1 7778 - 8149 m 39.0 m 4.8
Table D-1
Comparing the ICAO Collision Risk Model (CAT I) to the PRM Approaches [19]
99

I
0 U
r 0 C 0 0
IL
- U
E
-600-500-400-300-200-100 0 100 200 300 400 500 600
Centerllne Devlatlon (feet)
Figure D-I. The lateral distribution ofthe Memphis IMC am'vals of heavy and large aircra$t at 2.2-2.4 nmi with a normal curve overlay.
0.08
0.07 1 - Q U
r 0 C 0
0
IL
- U
2
O a o 6 I 0.05
-600-500-400-300-200-100 0 100 200 300 400 5 0 0 600
Centerllne Devlatlon (feet) Figure 0-2. The lateral distribution of the Memphis XMC arrivals of heavy and large aircraft at 4.2-4.4 nmi
with a normal curve overlay. 100

REFERENCES
LaFrey, R.R., “Parallel Runway Monitor.” The Lincoln Laboratory Journal, Fall 1989, MIT Lincoln Laboratory, Lexington, MA, Vol2, Number 3. pp. 41 1436.
Federal Aviation Administration, “Precision Runway Monitor Demonstration Report.” DOT/FAA/RD-91/5.
“Lateral Separation.” Resalab Incorporated, Advanced Systems Department, Report NO. FAA-RD-72-58, Volumes I and 11, July 1972.
Buckanin, D and Biedlzycki, R. “Navigational Performance of Aircraft Making Dependent Instrument Landing System (ILS) Approaches at Memphis International Airport.” DOT/FAA/CI’-TN86/59.
Saunders, K. W. and M. J. Hoffman, “The PRM ARTS Interface.” MIT Lincoln Laboratory, Lexington, MA, Report ## 42PM-PRM-0001
Aviation Weather Sewices AC0045C, 1985 (supplement to Aviation Weather ACOO-6A)
“AOPA’S Handbook for Pilots 1989.” Collins, R. L., editor, et al., Published by Aircraft Owners and Pilots Association, Frederick, Maryland, 1989. p. 108.
Air Traffic Controller‘s Handbook, 7110.65D CHG 5 5/8/86, Section 5-1264.
. . Chatfield, C., Statlstlcs for Technologv . New York:, NY, Chapman and Hall, 1983, pp. 131- 132.
[ 101 Snedecor, G.W. and W.G. Cochran, Statistical Methods. The Iowa State University Press, Ames, Iowa, 1980, pp. 470471.
[ 111 McLaughlin, Francis X., “Navigational Accuracy Demonstrated with the Instnunent Landing System.” Franklin Institute Laboratories for Research and Development, FAA Contract FAABRD-14. June 1959.
[12] Owen, M., “A Study of Instrument Landing System Localizer Deviations: Autopilot versus Handflown.” ATC Project Memo 42PM-PRM-0004.
[ 131 Orgun, M. and S. Flannigan, The Boeing Company 747-757-767 Autopilot Flight Director Systems Group, (Letters and Personal communication, 1990).
[14] Thomas, J. and D. Timoteo, “Chicago OHare Simultaneous ILS Approach Data Collection and Analysis.” DOT/FAA/CT-TN90/11.
[15] Federal Aviation Administration, “Contractions 7340.1K CHG 5 US DOT.” February 1, 1990.
101

[16] Norusis, Marija J. SPSS Base System User’s Guide. Chicago, Illinois: SPSS, Inc., 1990. pp.
[17] Chatfield, Christopher. Statistics for Technology. New Yo&: Chapman and Hall, 1983. pp.
[ 181 Taylor, John K. Statistical Techniques for Data Analysis. Chelsea, Michigan: Lewis Publishers,
[ 191 Pate, D. P. and A. Jones, Federal Aviation Administration, Office of Aviation System Standards,
115.
95-98.
I ~ c . , 1990. pp. 27-38.
(Letters and Personal communication, 1993).
102

GLOSSARY
A M P S
ARTS
ATC
ATCRBS
ATIS
CDI
DEC
DEDS
FAA
FAATC
FIE
ICAO
IFR
ILS
IMC
IOP MDBM *
. IRIG
MODSEF
ModeA
Mode S
MSL
ATCRBS Monopulse Processing System
Automated Radar Terminal System
Air TMic Control
Air TMic Control Radar Beacon System
Automatic Terminal Information Service
Course Deviation Indicator
Digital Equipment Corporation
Data Entry and Display Subsystem of ARTS
Federal Aviation Administration
Federal Aviation Administration Technical Center
Flight Technical E H O ~ the lateral alignment error of the pilot or autopilot with the CDI International Civil Aviation Organization
Instrument Flight Rules
Instrument Landing System; radio-navigation signals identifying a precise flight path, laterally with the localizer and vertically with the glideslope.
Instrument Meteorological Conditions
Input/Output Processors Multiplexed Display Buffer Memory (part of ARTS)
Inter-Range Instrumentation Group
Mode S Experimental Facility
Secondary Surveillance Radar (SSR) identity mode
Expansion of SSR with discrete address beacon system
Mean Sea Level
103

MVFR
nmi
Nlz
PRM
RDMS
r m S
SQL
TNSE
WORM
WSI
VFR
GLOSSARY (continued)
Marginal Visual Flight Rules
Nautical mile(s) (6,076 feet)
No Transgression Zone
Precision Runway Monitor
Relational Database Management System
Root-mean-square
Structured Query Language
Total Navigational System Error, the combination of the FIE, the CDI error, the ILS error, and the errors in the sensor.
Write Once Read Many
Weather Service International
Visual Flight Rules
104