the singular value decomposition and least squares problems · the singular value decomposition and...
TRANSCRIPT
The Singular Value Decompositionand Least Squares Problems
Tom Lyche
University of Oslo
Norway
The Singular Value Decomposition and Least Squares Problems – p. 1/27
Applications of SVD1. solving over-determined equations
2. statistics, principal component analysis
3. numerical determination of the rank of a matrix
4. search engines (Google,...)
5. theory of matrices
6. and lots of other applications...
The Singular Value Decomposition and Least Squares Problems – p. 2/27
Singular Value Decomposition1. Works for any matrix A ∈ C
m,n
2. A = UΣV H with U , V unitary and Σ =[
Σ1 0
0 0
]
∈ Cm,n
3. Σ1 = diag(σ1, . . . , σr) with σ1 ≥ σ2 ≥ · · · ≥ σr > 0,
4. r is the rank of A.
5. We define σr+1 = · · · σn = 0 if r < n and call σ1, . . . , σn
the singular values of A.
6. The columns u1, . . . ,um of U and v1, . . . ,vn of V arecalled left- and right singular vectors respectively.
The Singular Value Decomposition and Least Squares Problems – p. 3/27
Relation to eigenpairs for ATA and AA
1. ATAvi = σ2i vi for i = 1, . . . , n.
2. The columns of V are orthonormal eigenvectors ofATA
3. The columns of U are orthonormal eigenvectors ofAAT
The Singular Value Decomposition and Least Squares Problems – p. 4/27
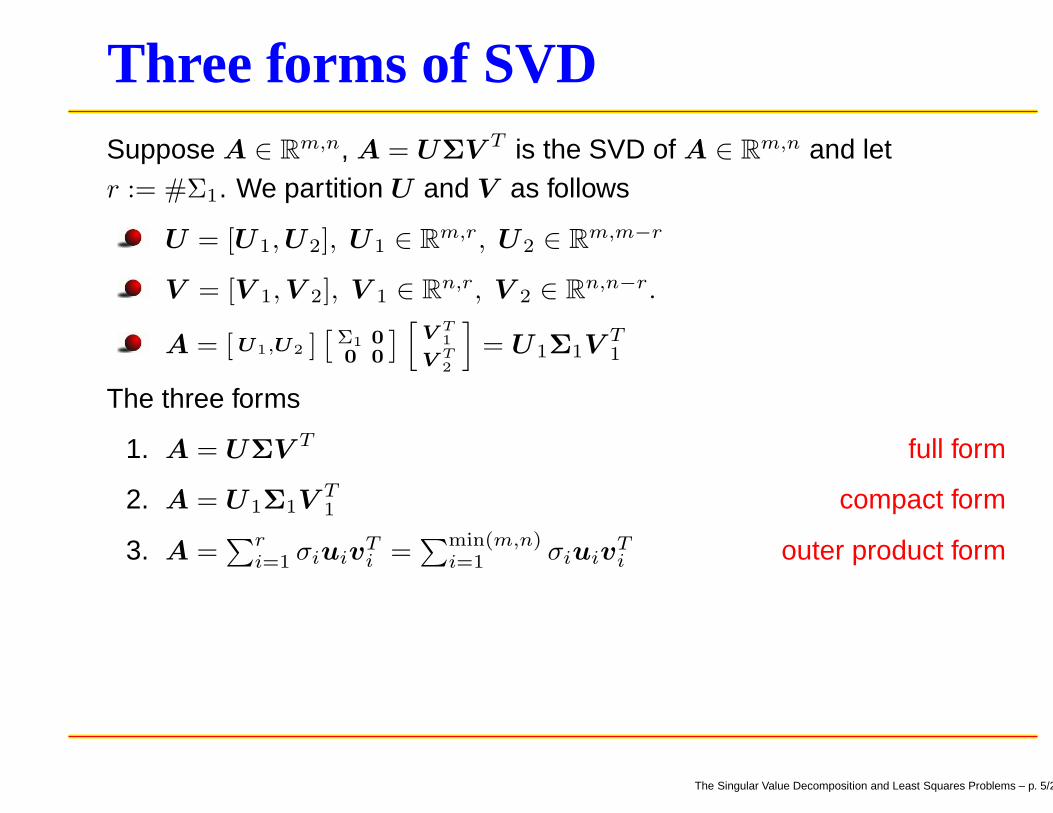
Three forms of SVDSuppose A ∈ Rm,n, A = UΣV T is the SVD of A ∈ Rm,n and letr := #Σ1. We partition U and V as follows
U = [U1, U2], U1 ∈ Rm,r, U2 ∈ R
m,m−r
V = [V 1, V 2], V 1 ∈ Rn,r, V 2 ∈ R
n,n−r.
A = [ U1,U2 ][
Σ1 0
0 0
]
[
VT
1
VT
2
]
= U1Σ1VT1
The three forms
1. A = UΣV T full form
2. A = U1Σ1VT1 compact form
3. A =∑r
i=1 σiuivTi =
∑min(m,n)i=1 σiuiv
Ti outer product form
The Singular Value Decomposition and Least Squares Problems – p. 5/27
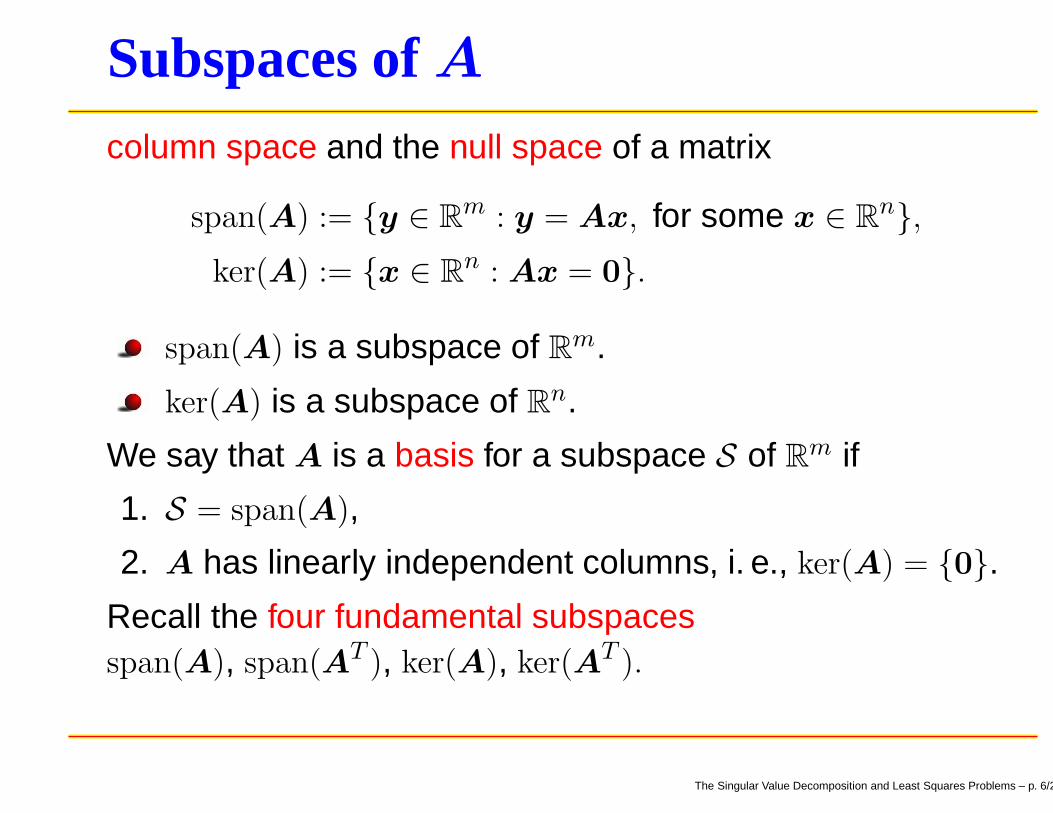
Subspaces of A
column space and the null space of a matrix
span(A) := {y ∈ Rm : y = Ax, for some x ∈ R
n},
ker(A) := {x ∈ Rn : Ax = 0}.
span(A) is a subspace of Rm.
ker(A) is a subspace of Rn.
We say that A is a basis for a subspace S of Rm if
1. S = span(A),
2. A has linearly independent columns, i. e., ker(A) = {0}.
Recall the four fundamental subspacesspan(A), span(AT ), ker(A), ker(AT ).
The Singular Value Decomposition and Least Squares Problems – p. 6/27
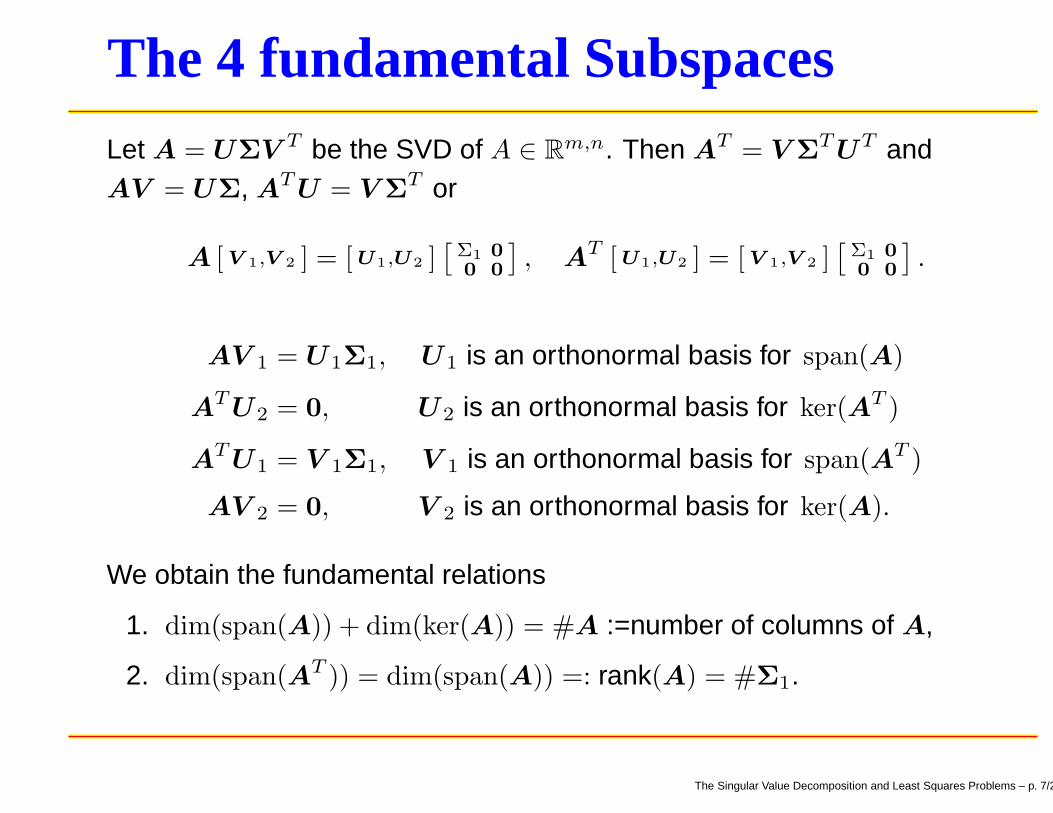
The 4 fundamental SubspacesLet A = UΣV T be the SVD of A ∈ Rm,n. Then AT = V Σ
T UT andAV = UΣ, AT U = V Σ
T or
A [ V 1,V 2 ] = [ U1,U2 ][
Σ1 0
0 0
]
, AT [ U1,U2 ] = [ V 1,V 2 ][
Σ1 0
0 0
]
.
AV 1 = U1Σ1, U1 is an orthonormal basis for span(A)
AT U2 = 0, U2 is an orthonormal basis for ker(AT )
AT U1 = V 1Σ1, V 1 is an orthonormal basis for span(AT )
AV 2 = 0, V 2 is an orthonormal basis for ker(A).
We obtain the fundamental relations
1. dim(span(A)) + dim(ker(A)) = #A :=number of columns of A,
2. dim(span(AT )) = dim(span(A)) =: rank(A) = #Σ1.
The Singular Value Decomposition and Least Squares Problems – p. 7/27
Existence of SVDTheorem 1. Every matrix has an SVD.
The Singular Value Decomposition and Least Squares Problems – p. 8/27
Uniqueness
If the SVD of A is A = UΣV T then ATA = V ΣTΣV T .
Thus σ21, . . . σ
2n are uniquely given as the eigenvalues of
ATA arranged in descending order.
Taking the positive square root uniquely determines thesingular values.
From the proof of the existence theorem it follows thatthe orthogonal matrices U and V are in general notuniquely given.
The Singular Value Decomposition and Least Squares Problems – p. 9/27
Application I, rankGauss-Jordan cannot be used to determine ranknumerically
Use singular value decomposition
numerically will normally find σn > 0.
Determine minimal r so that σr+1, . . . , σn are "close" toround off unit.
The Singular Value Decomposition and Least Squares Problems – p. 10/27
Application II, overdetermined EquationsGiven Am,n and b ∈ R
m.
The system Ax = b is over-determined if m > n.
This system has a solution if b ∈ span(A), the column space of A,but normally this is not the case and we can only find an approximatesolution.
A general approach is to choose a vector norm ‖·‖ and find x whichminimizes ‖Ax − b‖.
We will only consider the Euclidian norm here.
The Singular Value Decomposition and Least Squares Problems – p. 11/27
The Least Squares ProblemGiven Am,n and b ∈ R
m with m ≥ n ≥ 1. The problem to find x ∈ Rn
that minimizes ‖Ax − b‖2 is called the least squares problem.
A minimizing vector x is called a least squares solution of Ax = b.
Several ways to analyze:
Quadratic minimization
Orthogonal Projections
SVD
The Singular Value Decomposition and Least Squares Problems – p. 12/27
Quadratic minimization
Define function E : Rn → R by E(x) = ‖Ax − b‖2
2
E(x) = (Ax − b)T (Ax − b) = xT Bx − 2cT x + α, where
B := AT A, c := AT b and α := bT b.
B is positive semidefinite and positive definite if A hasrank n.
Since the Hessian HE(x) :=(∂2E(x)
∂xi∂xj
)
= 2B we can findminimum by setting partial derivatives equal zero.
∇E(x) :=(∂E(x)
∂xi
)
= 2(Bx − c) = 0
Normal equations AT Ax = ATb.
The Singular Value Decomposition and Least Squares Problems – p. 13/27
A simple example
x1 = 1
x1 = 1
x1 = 2
, A =
1
1
1
, x = [x1], b =
1
1
2
,
Quadratic minimization problem:‖Ax − b‖2
2 = (x1 − 1)2 + (x1 − 1)2 + (x1 − 2)2.
Setting the first derivative with respect to x1 equal to zero we obtain2(x1 − 1) + 2(x1 − 1) + 2(x1 − 2) = 0 or 6x1 − 8 = 0 or x1 = 4/3
The second derivative is positive (it is equal to 6) and x = 4/3 is aglobal minimum.
The Singular Value Decomposition and Least Squares Problems – p. 14/27
Theory; Direct sum and Orthogonal SumSuppose S and T are subspaces of a vector space (V , F). We define
1. Sum: X := S + T := {s + t : s ∈ S and t ∈ T };
2. Direct Sum: If S ∩ T = {0}, then S ⊕ T := S + T .
3. Orthogonal Sum: Suppose (V , F, 〈·, ·〉) is an inner product space.Then S ⊕ T is an orthogonal sum if 〈s, t〉 = 0 for all s ∈ S and allt ∈ T .
4. orthogonal complement:T = S⊥ := {x ∈ X : 〈s, x〉 = 0 for all s ∈ S}.
The Singular Value Decomposition and Least Squares Problems – p. 15/27
Basic factsLemma 1. Suppose S and T are subspaces of a vector space (V , F).
1. S + T = T + S and S + T is a subspace of V .
2. dim(S + T ) = dimS + dim T − dim(S ∩ T )
3. dim(S ⊕T ) = dimS +dimT . Every v ∈ S ⊕T can be decomposed uniquely
as v = s + t, where s ∈ S and t ∈ T . s is called the projection of v into S .
4. Pythagoras: If 〈s, t〉 = 0 then ‖s + t‖2 = ‖s‖2 + ‖t‖2.
5. Here ‖v‖ :=√
〈v, v〉.
v
t
sS
The Singular Value Decomposition and Least Squares Problems – p. 16/27
Column space of A and null space of A
Rm = span(A) ⊕ ker(AT ) and this is an orthogonal sum.
Thus ker(AT ) = span(A)⊥ the orthogonal complement of span(A).
Example
A =[
1 00 10 0
]
, span(A) = span(e1, e2), ker(AT ) = e3.
The Singular Value Decomposition and Least Squares Problems – p. 17/27
Proof that Rm = span(A) ⊕ ker(AT ) using SVD
sT t = 0 for all s ∈ span(A) and t ∈ ker(AT ).
For if s ∈ span(A) and t ∈ ker(AT ) then s = Ax for some x ∈ Rn and
AT t = 0.
But then 〈s, t〉 = (Ax)T t = xT (AT t) = 0
Suppose A = UΣV T = U1Σ1VT1 is the SVD of A.
Then I = UUT = [ U1 U2 ][
U1
U2
]
= U1UT1 + U2U
T2 .
For any b ∈ Rm we have b = (U1U
T1 + U2U
T2 )b = b1 + b2, where
b1 := U1UT1 b = AA†b with A† = V 1Σ
−11 UT
1 ,
and b2 := U2UT2 belongs to ker(AT ) since
AT b2 = (V 1Σ1UT1 )U2U
T2 b = V 1Σ1(U
T1 U2)U
T2 b = 0.
The Singular Value Decomposition and Least Squares Problems – p. 18/27
Projections and pseudoinverseb1 := AA†b is the projection of b into span(A).
The matrix A† := V 1Σ−11 UT
1 = V Σ†UT ∈ Rn,m is called the
pseudoinverse of A = UΣV T ∈ Rm,n.
Σ† :=
[
Σ−1
10
0 0
]
∈ Rn,m is the pseudoinverse of Σ.
b2 := (I − AA†)b is the projection of b into ker(AT ).
Example
A =[
1 00 10 0
]
= UΣV T = I3AI2, A† = I2 [ 1 0 00 1 0 ] I3 = [ 1 0 0
0 1 0 ] .
b =
[
b1
b2
b3
]
, b1 = AA†b =[
1 0 00 1 00 0 0
]
b =[
b1
b2
0
]
b2 = (I3 − AA†)b =[
0 0 00 0 00 0 1
]
b =[
00b3
]
The Singular Value Decomposition and Least Squares Problems – p. 19/27
LSQ; Existence and UniquenessTheorem 2. The least squares problem always has a solution. The solution is unique if
and only if A has linearly independent columns.
Proof. Let b = b1 + b2, where b1 ∈ span(A) is the (orthogonal) projection of b
into span(A) and b2 ∈ ker(AT ).
Since b1 ∈ span(A) there is an x ∈ Rn such that Ax = b1. Thus
b2 = b − Ax.
By Pythagoras, for any s ∈ span(A) with s 6= b1
‖b − s‖2 = ‖b1 − s‖2 + ‖b2‖2 = ‖b1 − s‖2 + ‖b − Ax‖2 > ‖b − Ax‖2.
Since the projection b1 is unique, the least squares solution x is unique if and only if
A has linearly independent columns.
The Singular Value Decomposition and Least Squares Problems – p. 20/27
The Normal EquationsTheorem 3. Any solution x of the least squares problem is a solution of the linear system
AT Ax = AT b.
The system is nonsingular if and only if A has linearly independent columns.
Proof. Since b − Ax ∈ ker(AT ), we have AT (b − Ax) = 0 or
AT Ax = AT b.
AT A is nonsingular. Suppose AT Ax = 0 for some x ∈ Rn. Then
0 = xT AT Ax = (Ax)T Ax = ‖Ax‖22. Hence Ax = 0 which implies that
x = 0 if and only if A has linearly independent columns.
The linear system AT Ax = AT b is called the normal equations.
The Singular Value Decomposition and Least Squares Problems – p. 21/27
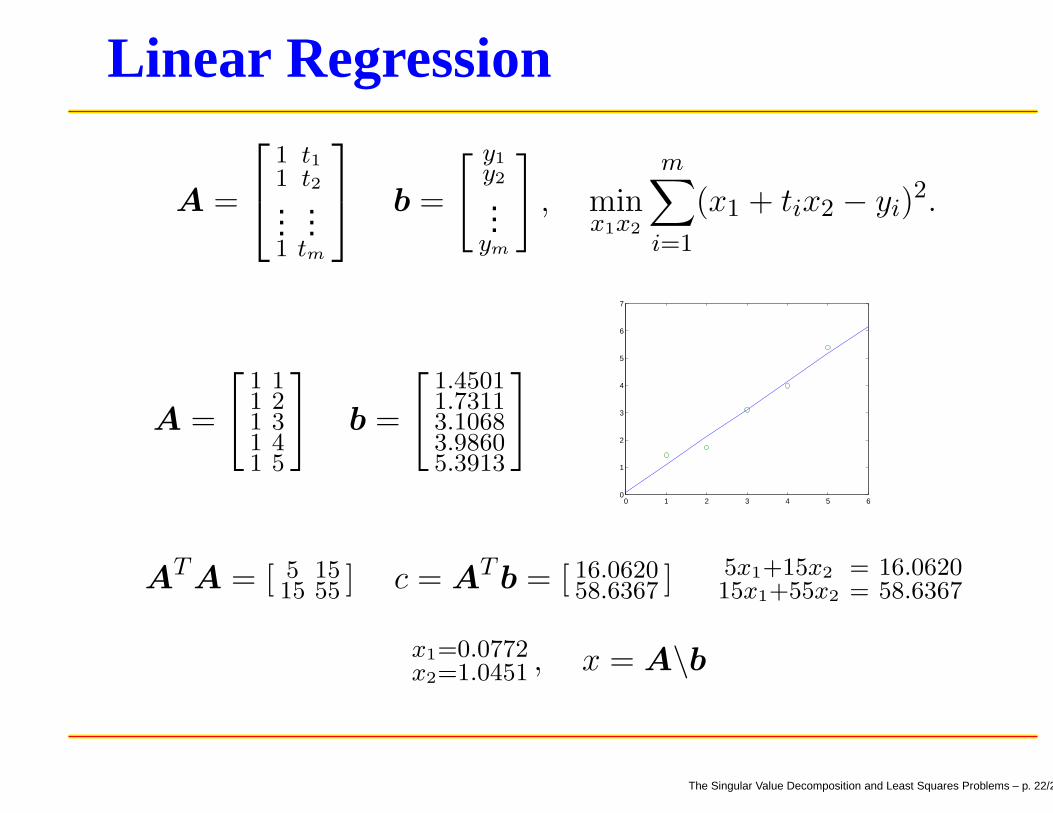
Linear Regression
A =
1 t11 t2...
...1 tm
b =
[ y1
y2
...ym
]
, minx1x2
m∑
i=1
(x1 + tix2 − yi)2.
A =
[
1 11 21 31 41 5
]
b =
[
1.45011.73113.10683.98605.3913
]
0 1 2 3 4 5 60
1
2
3
4
5
6
7
AT A = [ 5 1515 55 ] c = AT b = [ 16.0620
58.6367 ] 5x1+15x2 = 16.062015x1+55x2 = 58.6367
x1=0.0772x2=1.0451 , x = A\b
The Singular Value Decomposition and Least Squares Problems – p. 22/27
Analysis of LSQ using A = UΣV T
Define y := V Tx =[
V T1 x
V T2 x
]
=[ y
1
y2
]
. Recall ‖Uv‖2 = ‖v‖2 for
any U ∈ Rn,n with UT U = I and any v ∈ R
n.
‖b − Ax‖22 = ‖UUTb − UΣy‖2
2 = ‖UT b − Σy‖22 = ‖
[
UT1 b
UT2 b
]
−[
Σ1 0
0 0
] [ y1
y2
= ‖[
UT1 b−Σ1y1
UT2 b
]
‖22 = ‖UT
1 b − Σ1y1‖22 + ‖UT
2 b‖22.
We have ‖b − Ax‖2 ≥ ‖UT2 b‖2 for all x ∈ R
n with equality ifand only if
x = V y = [ V 1 V 2 ][
Σ−1
1UT
1 by
2
]
= V 1Σ−11 UT
1 b+V 2y2, for all y2 ∈ Rn−r.
(1)
The Singular Value Decomposition and Least Squares Problems – p. 23/27
The general solution of min‖Ax − b‖2
The columns of V 2 is a basis for ker(A) so thatker(A) = {z = V 2y2 : y2 ∈ R
n−r}.
Therefore the solution set is
{x ∈ Rn : ‖Ax − b‖2 is minimized } = A†b + ker(A).
If r = n then A has linearly independent columns andATA is nonsingular.
Since AT Ax = AT b we obtain A† = (ATA)−1AT in thiscase.
The Singular Value Decomposition and Least Squares Problems – p. 24/27
The Minimal Norm SolutionSuppose A is rank deficient (r < n).
Let x = A†b + V 2y2 be a solution of min‖Ax − b‖2.
A†b and V 2y2 are orthogonal
By Pythagoras ‖x‖22 = ‖A†b‖2
2 + ‖V 2y2‖22 ≥ ‖A†b‖2
2.
The solution x∗ = A†b is called the minimal normsolution to the LSQ problem.
Orthogonal. Since V T2 A† = (V T
2 V 1)Σ−11 UT
1 = 0 wehave (V 2y2)
T A†b = 0 for any y2.
The Singular Value Decomposition and Least Squares Problems – p. 25/27
More on the pseudoinverse
If A is square and nonsingular then A† = A−1.
A† is always defined.
Thus A† is a generalization of usual inverse.
If B ∈ Rn,m satisfies
1. ABA = A
2. BAB = B
3. (BA)T = BA
4. (AB)T = AB
then B = A†.
Thus A† is uniquely defined by these axioms.
The Singular Value Decomposition and Least Squares Problems – p. 26/27
Example
Show that the pseudoinverse of A =[
1 11 10 0
]
is B = 14 [ 1 1 0
1 1 0 ].
We have BA = 12 [ 1 1
1 1 ] and AB = 12
[
1 1 01 1 00 0 0
]
. Thus
1. ABA = A
2. BAB = B
3. (BA)T = BA
4. (AB)T = AB
and hence A† = B.
The Singular Value Decomposition and Least Squares Problems – p. 27/27