the solution of multi-objective multimode resource ... · `silvae genetica (issn: 0037-5349)...
TRANSCRIPT

`SILVAE GENETICA (ISSN: 0037-5349)
Available online May 2015
www.sauerlander-verlag.com
20
The Solution of Multi-Objective Multimode Resource-Constrained Project
Scheduling Problem (RCPSP) with Partial Precedence Relations by Multi-
Objective Bees Algorithm
Behzad Ghasemi1,Amir Sadeghi
2*, Mehdi Roghani
3
1 Young Researchers and Elite Club, South Tehran Branch, Islamic Azad University, Tehran, Iran
2 PhD Student, Department of Industrial Management, College of Management & Accounting, South Tehran
Branch, Islamic Azad University, Tehran, Iran 3 department of Industrial Management omidiyeh branch, Islamic Azad University, Omidiyeh, Iran
*Corresponding author : [email protected]
ABSTRACT
Resource Constrained Project Scheduling Problem (RCPSP) is the most general scheduling problem. Job shop
scheduling, flow shop scheduling and other scheduling problems are the subsets of RCPSP. The present paper
examines the multimode multi-objective resource constrained project scheduling problem (RCPSP) with partial
precedence relations. To enhance the practical aspects of this prominent problem, important practical purposes
including minimizing the completion time of the project, maximizing the quality of project activities and
minimizing the total cost of the project were considered. After validation of the model using the Bees
Algorithm, the proposed multi-objective model was solved. The results obtained from the proposed model were
compared with those obtained from NSGA-II. The results demonstrated the good performance of the proposed
algorithm in solving RCPSPs.
Key words: Project scheduling, Resource constraints, Multi-objective, RCPSP, MOBEE algorithm, NSGA-
II
SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
21
INTRODUCTION
Resource Constrained Project Scheduling
Problem (RCPSP) is the most general
scheduling problem. Job shop scheduling, flow
shop scheduling and other scheduling
problems are the subsets of RCPSP. Project
scheduling is one of the main tasks and
activities of project management. Project
scheduling is a difficult task because of
resource constraints and precedence relations
among activities. In practice, special software
is used for project scheduling. The software is
based on a formal model that allows
description of the real project only by one set
of scheduling constraints and an objective
function [1].
There are two general modes for project
scheduling:
In the first method, the scheduling program is
first developed only by taking into account
specified precedence relations (using
CPM/PERT method). Then, the resources are
entered to obtain per period consumption and
distribution of resources throughout the
program. According to this information, the
resources are supplied or tasks are outsourced
to implement the program. In the case where
there are resource constraints, resource
leveling is attempted. Resource leveling may
lead to the prolongation of the project. In this
method, the scheduling is not optimal, but is
acceptable. However, this method is mostly
used due to the ease of calculation. The
commercial software includes this method.
In the second method, the program is
scheduled by taking into account both
prerequisites and resources. Indeed, network
computations have no priority on satisfaction
of resource constraints, but both are
considered simultaneously. In this method, the
objective is to minimize the completion time
of the project. There are numerous studies on
single-objective models and this is considered
as the main drawback of such studies. The
scheduling models developed based on the
second are known as RCPSP.Table 1 shows
the development process for RCPSP models.
Table 1: Development of project scheduling models
Year Author Method
1961 Kelley Critical Path Model (CPM)
1962 Roy MPM
1963 kelley RCPSP
1967 Pritsker GERT
1969 Pritsker The first formulation for RCPSP
1983 Blazevicz RCPSP as a NP-Hard problem
1988 Kaplan RCPSP formulation with preemptive activities
1993 Alvarez Another formulation for RCPSP
1997 Goldratt CCM
1998 Mingozzi Another formulation for RCPSP
1998 Brucker Classification of RCPSP models
2000 Klein Another formulation for RCPSP
2000-2014 Other Researcher The use of different methods for solving various
RCPSPs
Resource Constrained Project Scheduling
Problem (RCPSP) is scheduling project
activities considering both precedence
relations and resource constraints. RCPSP
includes a project with J activities, where j =
1,..., J. The t completion time (duration) of the
activity j is shown by Di. Each activity can be
started only once, and the activities can be
preemptive or non-preemptive. Due to
technical requirements, there are precedence
relations among activities which are shown by
a set of relations, Pj. The activity j can be
started when all precedence relations and
requirements ( jPi) are completed.
Precedence relations can be displayed using
“activity on node” (AON) networks. This
assumption is displayed by non-circularity of
Silvae Genetica 57, 1 (2015)

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
22
the network. Each activity needs a specified
amount of resources to be performed [1].
According to Blazewicz et al [2], RCPSP is a
strong NP-Hard problem. The mathematical
model of RCPSP was developed by Pritsker et
al.[3] The standard RCPSP model is shown by
maxCprecps representing a project
scheduling problem with precedence relations
between activities aimed at minimizing the
project completion time. Although the RCPSP
model described above is a very capable
model, it cannot cover all real situations.
Accordingly, researchers have developed
many general models for project scheduling
problem. These models often use the standard
RCPSP model as a starting point.
RCPSP Types
Various RCPSP types have been studied in
different modes. RCPSPs can be classified as
follows:
1- Based on the nature of activities
2- Based on required resources
3- Based on precedence relations
4- Based on the type of objective function
5- Based on the number of objective functions
6- Based on the number of projects
The classification criteria and sub-criteria in
the following chart will be explained in detail.
Classification Criteria
The n
ature
of Ac
tivity
Reso
urce
Typ
e
Type
of P
rece
denc
e
Relat
ion
Type
of
Objec
tive F
uncti
on
Numb
er of
Objec
tive F
uncti
on
Natur
e of
Objec
tives
Numb
er of
proje
ct
Single Mode/ Multi Mode
Preemptive/Non-Preemptive
Probability/ Difinite /Fuzzy
Renewable
Non-Renewable
Dual
Partially Renewable
Dedicated Resource
Resource capacities
varying with time
Continous Resource
Partial
GPR
Regular
Unregular
Single objective
Bi-objective
Multi-objective
Time-based objective
Current-value base objective
Cost-based objective
Renewable Resource
based objective
Non-Renewable Resource
based objective
Consistency based objective
Single Project
Multi Project
Figure 1: Classification of RCPSPs

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
23
Multi-objective resource-constrained
project scheduling problem
Obviously, in an ideal situation it is better to
consider more than one objective to implement
the project scheduling. Considering only one
objective to solve such problems may cause
large losses in practice. Consequently, some
authors have used multiple objectives in
project scheduling.
Nadtasmbon and Randaha [4] proposed a
broad practical approach for considering
multiple objectives by creating a weighted
objective function of multiple objective
functions. The weighted function includes
several functions such as cost minimization,
minimizing weighted tardiness, resource
leveling and the usage of non-renewable
resources.
Witt and Vob [5] studied a multimode RCPSP
with three objectives including cost
minimization, minimizing weighted tardiness
and minimizing the preparation costs. The
activities can be categorized by taking into
account the preparation costs. This was in fact
a production planning problem in a steel
factory. Haouri and Al-Fawzan [6] integrated
two objectives including maximization of the
total free float and minimization of the
completion time of the project. The other
solution for multi-objective RCPSPs is to
develop an optimal Pareto scheduling. Davis et
al [7] investigated minimization of the project
completion time and overuse of renewable
resources. Viana and de Sousa [8] integrated
minimization of the overuse of nonrenewable
resources and the weighted tardiness. Hapke et
al [9] used a multi-objective approach
involving time-based, resource-based and
financial goals.Slowiniski et al [10] examined
a multimode RCPSP with a variety of
objectives including minimizing the project
duration and the delay weight of all delayed
activities, leveling the resource profile, the
weight of consumed resources and the present
value.Dorner et al [11] examined a time-cost
trade-off problem with three objectives. The
first objective was minimizing the project
completion time. The second and third
objectives were monetary and non-monetary
costs of the failure of activities.According to
Brooker Classification, the optimal Pareto
scheduling can be shown as a vector of all
objective functions.Weglarz and Nabrzynski
[12] used a well-known approach for the
multimode project scheduling problem and a
set of critical times and costs. They studied the
project completion time and resource leveling,
the delay weight of workflow (time), the
weight of total consumed resources and the
present value. Table 2 summarizes the theses
on RCPSP in Iran:
Table 2: Iranian Thesis on RCPSP
Thesis Title University Year
1 Analysis of DH branch and bound method for solving
multi resource-constrained project scheduling problem, a
data structure model and computer program
Isfahan
University of
Technology
2000
2 Scheduling the multi-mode resource-constrained project
activities considering the time value of money using the
refrigeration simulation and the Tabu search
Tehran
University 2005
3 Resource-constrained project scheduling by genetic
algorithm
Iran University
of Science and
Technology
2002
4 Multi-criteria resource-constrained fuzzy planning using
genetic algorithm
Tehran
University 2005
5 An efficient genetic algorithm for solving the resource-
constrained project scheduling problems
Tehran
University 2006
6 A heuristic algorithm for project scheduling using the
critical chain
Tehran
University 2002
7 The design of database-oriented decision support system
for scheduling RCSPS network
Amirkabir
University 2003
8 A heuristic method for RCSPS
Isfahan
University of 1986

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
24
Technology
9 A heuristic algorithm for project scheduling problem to
maximize the net present value
Isfahan
University of
Technology
2002
1
0 An algorithm to apply constraint theory in project
scheduling
Tarbiat
Modarres
University
1998
1
1 A method based on PSO algorithm for RCSPS Bu-Ali Sina
University 2009
1
2 The design of a combined genetic algorithm for solving
multimode RCSPS
Tarbiat
Modarres
University
2011
1
3 RCSPS: completion time, capabilities and NPV using the
MOPSO meta-heuristic method
Bu-Ali Sina
University 2011
The proposed model for the multi-objective
RCPSP
According to literature, the models used to
solve RCPSP suffer from some deficiencies.
Developing these models, a more
comprehensive and applicable model can be
obtained. The proposed model is defined to
cover the weaknesses of the previous models.
Due to the multi-objective nature of the
problem, a multi-objective model is proposed
considering the major objectives and goals of
executives in the industry.
The proposed model includes three objectives
of minimizing completion time, minimizing
the project costs and maximizing the quality of
the project activities. The first objective
(completion time minimization) is the most
famous objective in this kind of problems. By
minimizing the completion time of the last
activity in the project, this objective can be
achieved. Another objective in today's world
despite the enormous economic constraints is
minimizing the project costs. In this study, this
objective will be achieved through minimizing
the cost of each activity in the execution mode.
The last objective is to maximize the quality of
the project activities. This objective is highly
regarded by employers and project managers
in recent years. In this research, this objective
will be realized by maximizing the geometric
mean of the quality of each activity. To obtain
a more comprehensive and applicable model,
the general precedence relations between
activities are considered. Below, the decision
variables, presumptions and constraints are
described.
The presumptions of the proposed model are
as follows:
1- “This is multimode deterministic problem.”
The proposed model is intended to be
deterministic and thus the probable modes are
not considered. Therefore, it is recommended
to develop this model to consider uncertainty
or fuzzy modes in the proposed problem. In
addition, multimode project activities can be
included in the model. In practice, an activity
can be fulfilled in several ways. Therefore,
multimode activities are considered in the
proposed model.
2- “After the start of each activity, stoppage is
not permitted.”
In this research, preemptive mode is not
considered in the proposed problem and thus
activities can be done or failed at various
times. Therefore, after the start of an activity,
it must be continuously done until the end.
3- “The capacity of resources is specified and
limited.”
In the proposed model, the resources are
limited, renewable and non-renewable. The
capacity of resources is limited and specified
at the beginning of the project. Items such as
project budget are also considered as
renewable resources.
4- “No preparation time is required to perform
activities.”

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
25
According to literature, a time is considered
for preparation of resources to start and
perform an activity. In the proposed model, no
preparation time is needed for various project
activities.
Indices i, j: The number of project activities
mi: The executive mode of the activity i
ti: The time interval between the earliest and
latest start times of the activity i
k: The renewable or non-renewable resource
type
i : The nonrenewable resource k
di: Completion time of the activity
The decision variable
The decision variable is a binary variable
called Ximt. If the activity i is started at time t
in the executive mode m Ximt= 1, otherwise
Ximt=0. Ximt is defined as follows:
iiiimt lsestMmnix ,..,;,...,2,1;,...,2,1}1,0{
Since this is a multimode problem, three
indices are used for the decision variable. The
first index, i, represents the corresponding
activity, m denotes the executive mode of the
activity i and t shows the completion time of
the activity i and t is a time between the
earliest and latest start time of the activity i.
Model parameters
The parameters of the model are as follows:
i Activity i
Mi The executive modes of the activity i
A The set of activities
qim The quality of implementation of the
activity i in the executive mode m
Lsi The latest start time for the activity i
Esi The earliest start time for the activity i
Cim The implementation cost of the
activity i in the executive mode m
EFs The finish-start set of precedence
relations
FSij Minimal or maximal lag time between
the start and completion of the activity
i, j
dim The duration of the activity i in mode
m
rimk The per period usage of (total resource
consumption) of the activity j of
renewable resource k in the execution
mode m
The availability of the renewable
resource type k at each period
The per period usage of (total resource
consumption) of the activity j of
nonrenewable resource k in the
execution mode m
The availability of the nonrenewable
resource type k in the entire project
Mathematical model
The mathematical model of the problem is as
follows:
S.t.
s.t.
[1]
[2]
imt
Ai Mm
im
ls
est
XcfMini
i
i
3
k
imkr
ka
AM
m
imtim
ls
estAi
i i
i
XqfMax
1
1
1
n
n
ls
est
tnxtfMin 12 .
imt
Ai Mm
im
ls
est
XcfMini
i
i
3
1
1
iM
m
ils
iest
imtX
1 1
( ) ( , )j ji i
i i i
i j
M lsM ls
im ij im t jm t fs
m t es m t es
t d FS X tx i j E
k
n
i
M
m
lst
esdts
imsimk
i i
iim
xr
1 1
},1min{
},max{

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
26
[3] K=1,…,K , t=1,….,T
[4] K=1… K , t=1,…., T
[5]
I=1,,,, n
[6]
Presumptions
This is a deterministic problem with
multimode activities.
After the start of each activity,
stoppage is not permitted.
The time required to perform a certain
activity is deterministic.
No preparation time is required to
perform activities.
The capacity of resources is specified
and limited.
An activity is implementable when
the prerequisites are completely done.
The objective functions
The first objective is to maximize the quality
of the entire project. The geometric mean of
the quality of all activities is used to measure
the quality of the entire project. Basically, the
geometric mean is used for scattered quality of
activities.
The second objective is to minimize the
completion time of the last activity. As a
result, the project completion time is
minimized. The third objective is to minimize
the total cost of the project.
Constraints There are several constraints in the proposed
problem including:
- Start time
According to Constraint (1), each activity can
be implemented in a single mode. In fact, if an
activity has several execution modes and an
execution mode is selected based on
conditions, the activity will be executed in that
mode by the end of the activity. The execution
mode cannot be converted into other execution
modes.
- Precedence relations
As mentioned, partial precedence relations are
considered in the proposed model. Constraint
(2) is the most common constraint in all
RCPSPs with partial precedence relations.
This is a Finish-Start (FS) constraint. This
constraint is applied to those activities that can
be performed after an activity.
- Renewable resources
Like in the basic RCPSP, constraint (3)
concerns renewable resources. All resources
with the maximum applicable capacity in each
period are included. Renewable constraints
such as manpower and equipment are also
included in this constraint.
- Nonrenewable resources
Constraint (4) concerns non-renewable
resources. The total amount of nonrenewable
resources is specified at the beginning of the
project. The nonrenewable resources are
gradually reduced by consumption. Resources
such as project funding, supplies and
consumables are nonrenewable resources. The
implementation cost of activities is minimized
through the third objective function. In
addition, project funding also can be
considered as a renewable resource. Thus, to
avoid additional costs, a new constraint is not
defined and the project budget constraint is
included in the constraint (4).
k
n
i
M
m
ls
ess
imsimk
i i
i
xr 1 1
i
ls
est
imt
M
m
im
i
i
xq 1
1,0imtx

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
27
- Quality
Finally, the constraint (5) ensures that the
quality of each activity is not lower than a
predetermined level. The calculation rule is
explained in the following sections.
Constraint (6) shows the binary decision
variable, Ximt.
The standard PSPLIB problems are used as a
benchmark for the new model. Here,
multimode RCPSP are used. The number of
execution modes and the completion time for
each activity are available. The only change is
the amount of resources available. The amount
of resources in the new problem is 2 times the
amount of resources available in the basic
MRCPSP model. This is permitted due to the
complexity and multi-objective nature of the
problem.
Bees Algorithm
The Bees Algorithm is a population-based
search algorithm which was developed in
2005. It mimics the food foraging behavior of
honey bee colonies. In its basic version the
algorithm performs a kind of neighborhood
search combined with random search, and can
be used for both combinatorial optimization
(for simultaneous optimization of several
variables) and functional optimization. A
colony of honey bees can extend itself over
long distances and in multiple directions
simultaneously to harvest nectar or pollen
from multiple food sources (flower patches).
The flower patches with high nectar or pollen
that may be collected with less effort are
searched by a large fraction of the colony. The
flower patches with low nectar or pollen
attract a small fraction of the colony. The food
foraging is started by scout bees searching for
promising flower patches (with high hopes of
nectar or pollen).
The scout bees move randomly from a flower
patch to another. During the harvest season
(flowering), the colony keeps a number of
scout bees ready to continue food foraging.
When all flower patches were searched, the
scout bees perform a ritual known as waggle
dance on a highly profitable food source.
Through the waggle dance a scout bee
communicates the location of the flower patch,
the distance to the flower patch and its quality
to idle bees. Using this data, the follower bees
will go to the highly profitable flower patches
[13].
Figure 2: The Bees Algorithm flowchart for multi-objective problems [14]

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
28
Most of follower bees go to more promising
flower patches with higher hopes of nectar and
pollen. When all bees go to the same area, they
will be scattered around the flower patch due a
limited dancing range. Accordingly, not a
flower patch, but the best flowers in the flower
patch are indentified. The Bees Algorithm
evaluates each point in the parametric space
(consisting of possible solutions) as a food
source. The scout bees are simulated as
random agents to simplify the solution space.
They report the quality of the searched sites by
a merit function. Simplified solutions are
ranked. Other "bees" are new forces to search
the surrounding area of the solution space to
find the elite sites called “flower patch”. The
algorithm selectively searches other flower
patches to find the maximum point of the
merit function [15]. Figure 2 shows the
flowchart of the Bees Algorithm for single-
objective and multi-objective problems. The
flowchart mimics the food foraging behavior
of bees to find the best food resources. The
next figure is the flowchart of the Bees
Algorithm for multi-objective problems.
Bees Algorithm parameters
The Bees Algorithm needs the following
parameters
n= number of scout bees
m= number of sites selected out of n
previously visited sites
e= number of sites selected out of the m
selected sites
nep= number of bees recruited for the best e
sites
nsp= number of bees recruited for other (m-e)
selected sites
ngh= the initial size of patches including the
site, its neighborhood and the stopping
criterion
The algorithm is started by n soldiers (scout
bees) placed randomly in the search space. The
suitability of the sites searched by scout bees
is assessed in the step 2.
Step 1: The initial population with random
solutions
Step 2: Evaluate fitness of population
Step 3: Forming new population
Step 4: Select sites for neighborhood search
Step 5: Recruit bees for the selected places and
evaluate fitness
Step 6: Select the fittest bee from each patch
Step 7: Assign remaining bees to search
randomly and evaluate their fitness
Step 8: The end
The proposed Bees Algorithm for multi-
objective RCPSP
The Bee Algorithm steps for solving multi-
objective RCPSP are as follows:
The parameters of the proposed algorithm
- Number of scout bees
- Number of archive solutions
- Number of selected sites
- Number of the best sites
- Number of bees assigned to search the
neighborhood of selected sites
- Number of bees assigned to search the
neighborhood of the best sites
The neighborhood is defined as in the single-
objective mode.
The steps of the proposed algorithm
Step 1: generate an initial solution
The scout bees are randomly placed in sites
containing the values of all three objectives.
Step 2: Ranking based on the Pareto
solutions

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
29
In this step, the generated solutions are ranked.
The Pareto solutions that are not dominated by
any solution rank 1. In contrast, the non-
dominated solutions relative to the first ranked
solutions which are dominated relative to other
solutions rank 2. Similarly, all solutions are
ranked.
The crowding distance (CD) is obtained for
each solution and then the solutions are sorted
based on the Pareto rank and crowding
distance. Then, all initial scout bees are
located in the archive list.
Step 3: the main loop of the algorithm
In this step, the following items are executed
for a predetermined number of iterations:
First, the scout bees in the archive list are
selected. Novice bees are determined based on
the following formula:
Number of novice bees= number of scout bees
× number of best sites
Waggle dance is performed for best sites and
the bees search the neighborhood of the best
sites. At the same time, the above operations
are performed for other selected sites which
are not best solutions. A random number
between 0 and 1 is generated for the excluded
site. If the random number is smaller than 0.5,
bees will randomly search for other sites
within the solution interval. Otherwise, they
will search for neighborhood in the previous
solution site.
Step 4: Archive Solutions
Solutions generated by new bees are added to
the archived solutions. Then, the archive is
sorted by the Pareto ranking and crowding
distance according to Step 2.
If the number of archived solutions is greater
than the number of predetermined archived
solutions (here equal to 50), the solutions at
the end of the list will be deleted such that the
remainder of the archive is equal to the
predetermined value.
Step 5 (final step): Return to Step 3
Comparison of the proposed Bees
Algorithm and NSGA-II
According to the literature [16], NSGA-II
outperforms strong algorithms such as PSA,
SPEA-II used for multi-objective RCPSP.
Therefore, this algorithm is compared with the
Bees Algorithm used in this study. To
compare the two algorithms, a standard
mathematical problem called FON function is
used. FON is defined as follows:
Figure 3: The Pareto solutions of the NSGA-
II
Figure 4: The Pareto solutions of the Bees
Algorithm
As can be seen(Fig 3,4), both algorithms give
reasonable results for this problem, but the
Bees Algorithm outperforms the NSGA-II in
terms of the regularity of Pareto solutions.
To evaluate these two algorithms in the
proposed model, “regularity”, “number”,
“relative and qualitative criteria”, “scattering”
and CPU time are used.
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f1
f 2
Front 1
))3
1(exp(1)( 2
3
1
1 i
ixxf

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
30
Here, some small and large RCPSPs including
j102-2, j122-8, j141-8 and j301-1 are solved.
These problems are generated by MATLAB
according to the proposed RCPSP. The graphs
are compared with each other.
- Setting parameters for solving multi-
objective RCPSP
The following parameters are set to solve the
above multi-objective problems:
Number of scout bees: 20
Number of archived solutions: 50
Number of selected sites: 10
Number of best sites: 5
Number of bees assigned to search the
neighborhood of the selected sites: 10
Number of bees assigned to search the
neighborhood of the best sites: 30
To set the parameters, those influencing the
criteria were determined by solving various
problems. For this purpose, a variable
parameter was selected and other parameters
were fixed. The problems were solved several
times and the results were analyzed.
According to the results, the number of scout
bees and the number of bees assigned to the
selected sites and those assigned to the best
sites influence the performance of algorithm,
but other parameters have a very significant
impact on the results. Therefore, these three
parameters were adjusted.
To set the influencing parameters, an interval
was defined for each parameter according to
standard problems in the literature. Then, the
standard problems were solved using the
parameters with specified intervals. According
to the results, the value leading to the best
solution for multi-objective problems
including CPU time and the objective function
values was determined as the optimum value
of parameter.
The performance of two algorithms in
terms of “number”
The Bees Algorithm and NSGA-II were
compared according to the criteria defined in
the previous section. Table 2 summarizes the
results obtained for the criterion “number”
Table 3: Comparison of Bees Algorithm and NSGA-II in terms of “number”
NSGA-II Bees
Algorithm
Criterion Number
Problem
32 35 J102-2
30 35 J122-8
28 35 J141-8
31 33 J203-2
33 41 J301-1
As is clear from Table 2, the Bees Algorithm
outperforms the NSGA-II in terms of the
criterion “number” in all problems with
different sizes.
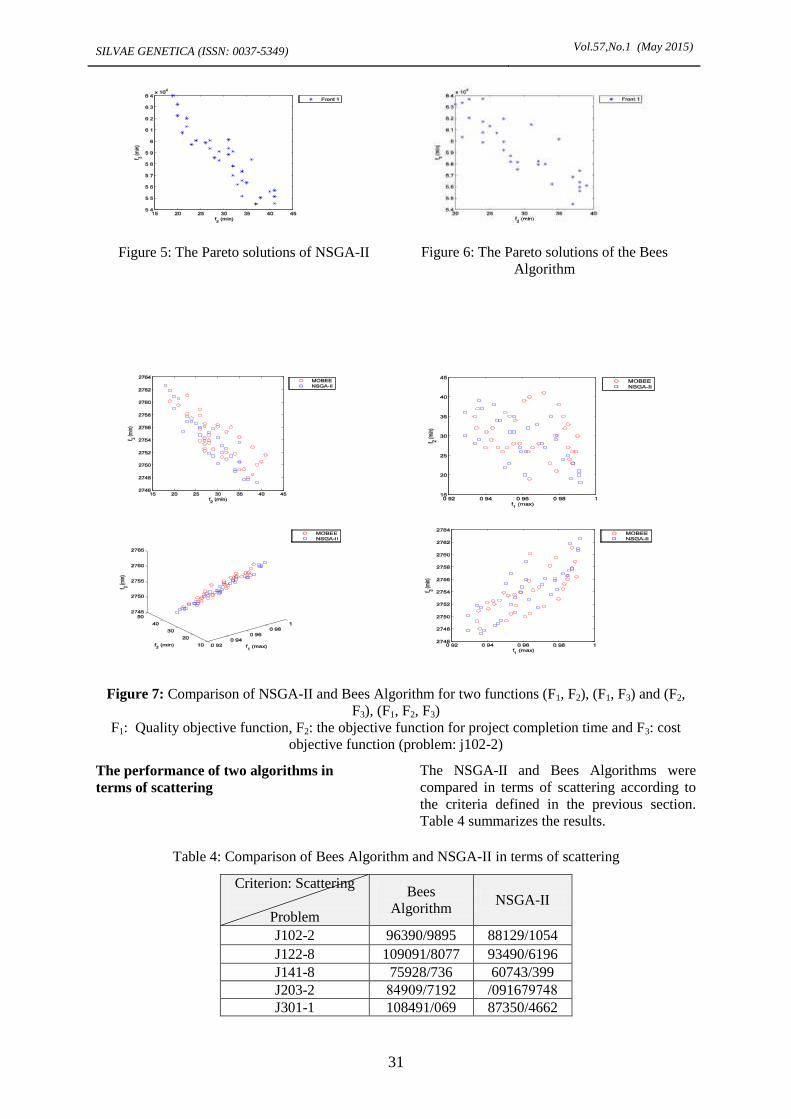
Figures 5 and 6 show the Pareto solutions of
j102-2 generated by NSGA-II and the Bees
Algorithm, respectively.
SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
31
Figure 5: The Pareto solutions of NSGA-II
Figure 6: The Pareto solutions of the Bees
Algorithm
Figure 7: Comparison of NSGA-II and Bees Algorithm for two functions (F1, F2), (F1, F3) and (F2,
F3), (F1, F2, F3)
F1: Quality objective function, F2: the objective function for project completion time and F3: cost
objective function (problem: j102-2)
The performance of two algorithms in
terms of scattering
The NSGA-II and Bees Algorithms were
compared in terms of scattering according to
the criteria defined in the previous section.
Table 4 summarizes the results.
Table 4: Comparison of Bees Algorithm and NSGA-II in terms of scattering
NSGA-II Bees
Algorithm
Criterion: Scattering
Problem
88129/1054 96390/9895 J102-2
93490/6196 109091/8077 J122-8
60743/399 75928/736 J141-8
/091674797 79444/7192 J203-2
87350/4662 108491/069 J301-1

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
32
Figures 8 and 9 show the Pareto solutions of
the problem, j 122-8, generated by NSGA-II
and Bees Algorithm, respectively. As shown
in Table 4, the Bees Algorithm outperforms
the NSGA-II in all problems with various
tasks.
Figure 8: The Pareto solutions of NSGA-II
Figure 9: The Pareto solutions of the Bees
Algorithm
Figure 10: Comparison of NSGA-II and bees algorithm for two functions (F1, F2), (F1, F3) and (F2, F3),
(F1, F2, F3) F1: Quality objective function, F2: the objective function for project completion time and
F3: cost objective function (problem: j122-8)
The performance of two algorithms in
terms of regularity
The NSGA-II and bees algorithms were
compared in terms of regularity according to
the criteria defined in the previous section.
Table 5 summarizes the results.
Table 5: Comparison of Bees Algorithm and
NSGA-II in terms of regularity
NSGA-
II
Bees
Algorithm
Criterion:
Regularity
Problem
0/4103 0/58989 J102-2
0/86105 0/83146 J122-8
0/87667 0/69209 J141-8
4/29746 4/71417 J203-2
0/66011 0/62211 J301-1

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
33
Figures 11 and 12 show the Pareto solutions of
the problem, j 141-8, generated by NSGA-II
and Bees Algorithms, respectively. As shown
in Table 5, the Bees Algorithm outperforms
NSGA-II algorithms in most problems expect
for problems with 10 and 20 activities.
Figure 11: The Pareto solutions of NSGA-II
Figure 12: The Pareto solutions of bees algorithm
Figure 13: Comparison of NSGA-II and bees algorithm for two functions (F1, F2), (F1, F3) and (F2, F3),
(F1, F2,F3) F1: Quality objective function, F2: the objective function for project completion time and
F3: cost objective function (standard problem: j 203-2)
The performance of two algorithms in
terms of relative and qualitative criteria
According to the criteria defined in the
previous section, the NSGA-II and bees
algorithms were compared in terms of relative
and qualitative criteria. Table 6 summarizes
the results.
Table 6: Comparison of Bees Algorithm and
NSGA-II in terms of relative and qualitative
criteria

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
34
NSGA-
II
Bees
Algorithm
Criterion: Relative
and qualitative
Problem
0/55357 0/54643 J102-2
0/63636 0/56364 J122-8
0/175 0/825 J141-8
4/725 4/675 J203-2
0/77083 0/72917 J301-1
In this case, NSGA-II outperforms the Bees
Algorithm. In contrast, the Bees algorithm
outperforms NSGA-II in J14 series problem. It
should be noted the difference between the
results is negligible as compared with other
criteria.
The performance of two algorithms in
terms of CPU Time
Table 7: Comparison of the Bees Algorithm
and NSGA-II in terms of CPU time
NSGA-II Bees
Algorithm
Criterion:
CPU Time
(s)
Problem
74/1694 74/4429 J102-2
77/7491 79/6999 J122-8
44/6491 77/4192 J141-8
146/4614 47/4991 J203-2
164/4991 169/7169 J301-1
Of important criterion used to compare the
meta-heuristic algorithms is CPU time to
obtain a solution. Therefore, the NSGA-II and
Bees Algorithm were compared in terms of
CPU time. Obviously, with increasing the
number of activities, the time to achieve a
solution is increased. But in all cases, the Bees
Algorithm reaches the final result sooner with
the same number of iterations as compared
with NSGA-II. To implement both algorithms,
a computer with 2.1 GHz CPU and Windows
XP operating system was used. Since the
problem was solved in MATLAB software,
surely the time to solve these problems is
comparable to other algorithms used for
solving this problem. Almost all of them have
been programmed by C++ or Java and thus are
not comparable. Thus, only CPU times for j30
and j60 and j120 series are given and CPU
times are not compared with other algorithms.
Accordingly, it is recommended programming
the algorithm by C or Java to examine the
performance of the algorithm in terms of CPU
time.
Comprehensive analysis of the bees and the
NSGA-II algorithm
To evaluate the performance of the algorithm,
the performance of the proposed algorithm in
solving small and large problems was
investigated in detail. The results are given the
following tables and figures. The results show
the relative superiority of the Bees Algorithm.
For this purpose, 20 small problems (j10, j12,
j14, j 16 series) and 20 large problems (j18,
j20 and j30) were selected and solved by both
algorithms. The results are given in Table 8.
Table 8: The performance of NGSA-II and Bees Algorithm in solving small problems
Small
problems
Number Scattering Regularity
Relative and
qualitative
MOBEE
NSGA-
II MOBEE NSGA-II MOBEE
NSGA-
II MOBEE
NSGA-
II
1 j102-4 36 32 1839150.851 1612700.15 0.58352 0.61364 0.66038 0.33962
2 j104-2 32 35 1497739.15 1613744.11 0.89318 1.036 0.35849 0.64151
3 j106-3 36 35 2523933.408 2443121.95 0.62875 0.75111 0.39655 0.60345
4 j108-6 32 34 1661382.631 1763999.3 0.65665 0.89325 0.45455 0.54545
5 j1011-5 40 36 2177656.797 2032103.86 0.52433 0.75618 0.76923 0.23077
6 j1064-10 37 38 2082972.302 2138625.77 0.95624 0.62958 0.36207 0.63793
7 j1211-2 33 40 1957940.852 1979058.2 0.69657 0.80428 0.8722 1
8 j1211-10 36 36 2443121.949 1832490.31 0.63441 0.8996 0.39655 0.39655
9 j12-12-7 41 34 2751256.849 2240360.6 0.77645 0.83215 0.67857 0.32143
SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
35
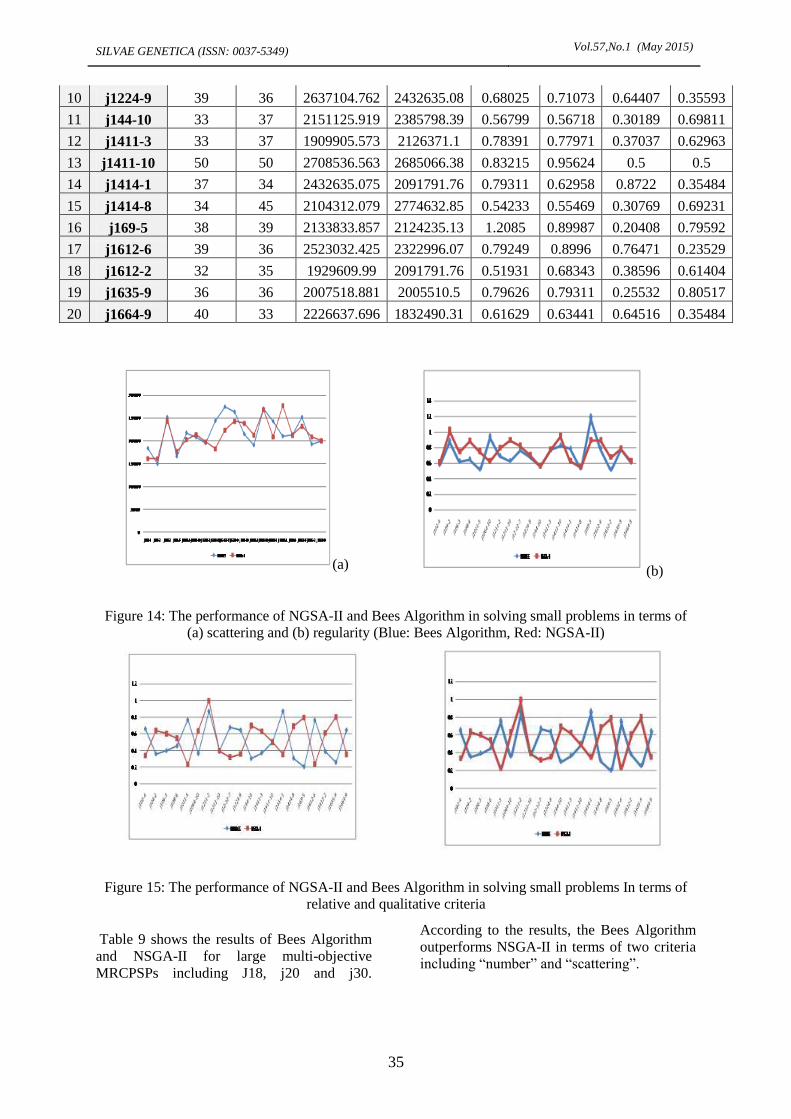
10 j1224-9 39 36 2637104.762 2432635.08 0.68025 0.71073 0.64407 0.35593
11 j144-10 33 37 2151125.919 2385798.39 0.56799 0.56718 0.30189 0.69811
12 j1411-3 33 37 1909905.573 2126371.1 0.78391 0.77971 0.37037 0.62963
13 j1411-10 50 50 2708536.563 2685066.38 0.83215 0.95624 0.5 0.5
14 j1414-1 37 34 2432635.075 2091791.76 0.79311 0.62958 0.8722 0.35484
15 j1414-8 34 45 2104312.079 2774632.85 0.54233 0.55469 0.30769 0.69231
16 j169-5 38 39 2133833.857 2124235.13 1.2085 0.89987 0.20408 0.79592
17 j1612-6 39 36 2523032.425 2322996.07 0.79249 0.8996 0.76471 0.23529
18 j1612-2 32 35 1929609.99 2091791.76 0.51931 0.68343 0.38596 0.61404
19 j1635-9 36 36 2007518.881 2005510.5 0.79626 0.79311 0.25532 0.80517
20 j1664-9 40 33 2226637.696 1832490.31 0.61629 0.63441 0.64516 0.35484
(b) (a)
Figure 14: The performance of NGSA-II and Bees Algorithm in solving small problems in terms of
(a) scattering and (b) regularity (Blue: Bees Algorithm, Red: NGSA-II)
Figure 15: The performance of NGSA-II and Bees Algorithm in solving small problems In terms of
relative and qualitative criteria
Table 9 shows the results of Bees Algorithm
and NSGA-II for large multi-objective
MRCPSPs including J18, j20 and j30.
According to the results, the Bees Algorithm
outperforms NSGA-II in terms of two criteria
including “number” and “scattering”.

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
36
Table 9: The performance of Bees Algorithm and NSGA-II in solving large problems
Large
problems
Number Scattering Regularity
Relative and
qualitative
MOBEE NSGA-
II MOBEE NSGA-II MOBEE
NSGA-
II MOBEE
NSGA-
II
1 j181-1 37 36 1085767.516 105681.7881 0.6926 0.68306 0.55556 0.44444
2 j1810-6 33 33 1097612.673 1081743.445 0.76626 0.76626 0.36872 0.46513
3 j1812-2 33 35 1675511.336 1631433.53 0.632 0.67321 0.75432 0.73144
4 j1812-9 38 38 1092453.633 1093534.524 0.78445 0.6723 0.8791 0.85632
5 j1821-1 40 41 2198343.342 2298843.111 0.6421 0.67622 0.5681 0.67132
6 j2011-8 36 33 1091636.622 1060042.94 0.70381 1.064 0.72 0.48
7 j2012-8 37 37 1894211.633 1954465.345 0.3463 0.5352 0.53 0.6722
8 j2030-1 39 40 1979058.203 1909915.573 0.89325 0.89987 0.67857 0.67857
9
j2030-
10 35 35 187531.131 186632.1313 0.5653 0.7632 0.61 0.57913
10 j2050-7 35 36 2637304.762 2432635.075 0.62103 0.71073 0.64417 0.75593
11 j2061-8 39 36 2637104.762 2432635.075 0.68025 0.71324 0.64407 0.45391
12 j2062-1 34 33 1408232.322 1058232.421 0.5211 0.6792 0.5613 0.6711
13
j2064-
10 36 36 1872431.231 1866131.001 0.4421 0.7619 0.8713 0.6721
14 j304-1 36 41 105655.7086 1260267.683 0.60549 0.72183 0.7069 0.52778
15 j304-3 40 38 147611.3211 1466671.313 0.8101 0.67813 0.6711 0.78131
16 j305-2 38 38 107903.4213 1086932.434 0.67432 0.64533 0.65242 0.59083
17 j304-10 37 35 1198776.322 1187763.434 0.7832 0.69024 0.6732 0.7133
18 j309-9 42 42 189123.131 183432.2412 0.7523 0.7632 0.67452 0.59032
19 j3050-6 39 40 2179058.203 2092915.573 0.89325 0.89987 0.67857 0.67857
20
j3064-
10 40 42 121740.7972 127806.096 0.64304 0.82878 0.50755 0.79245
For the ease of comparison, the results listed in Table 9 are depicted in Figures 16 and 17.

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
37
(a)
(b)
Figure 16: The performance of the Bees Algorithm and NSGA-II in solving large problems
in terms of number and scattering
(a)
(b)
Figure 17: The performance of the Bees Algorithm and NSGA-II algorithms in solving large
problems
in terms of (a) regularity and (b) the relative
and qualitative criteria
Conclusion The present paper proposed a multi-objective
mathematical model with the most important
objectives in the real world to solve the
multimode project scheduling problem. The
problem was then solved by the meta-heuristic
Bees Algorithm. According to the literature,
NGSA-II outperforms other algorithms in
solving multi-objective problems. Thus, the
results were compared with the results of
NSGA-II. The results demonstrated the good
performance of the meta-heuristic Bees
Algorithm. It is recommended to develop the
mathematical model proposed in this study to
replace the partial precedence relations with
general precedence relations (GPR). In
addition, the preparation time can be included
in the model to develop a more complex and
more practical problem.
References
1. Demeulemeester W S.,.Herrolen W S,2002,
Project Scheduling,Kluwer Academic
Publishers.
2. Blazewicz J., Lenstra J.K., Rinnooy Kan
A.H.G.,1983 , Scheduling subject to resource
constraints: Classification and complexity,
Discrete Applied Mathematics 5,11-24
3. Pritsker A.A.B., Watters L.J., Wolfe
P.M.,1969,, Multiproject scheduling with
limited resources: A zero-one programming
approach, Management Science6,93-107.

SILVAE GENETICA (ISSN: 0037-5349) Vol.57,No.1 (May 2015)
38
4. Sadeghi A.,Kalanaki A,Noktehdan A.,Safi
Samghabadi A. and Barzinpour F., 2011,Using
Bees Algorithm to Solve the Resource
Constrained. Project Scheduling Problem in
PSPLIB, Communications in Computer and
Information Science Volume 164, pp 486-494
5. Vos S., Witt A,2007, Hybrid flow shop
scheduling as a multi-mode multiproject
scheduling problem with batching
requirements: A real-world
application,International Journal of Production
Economics ,105,2,445-458.
6. Al-Fawzan M., Haouari M., ,2005, A bi-
objective model for robust resource
constrained project scheduling, International
Journal of Production Economics ,96,175-187.
7. Davis K.R., A. Stam, R.A. Grzybowski, 1992,
Resource constrained project scheduling with
multiple objectives: A decision support
approach, Computers and Operations Research
,19,7,657-669
8. Viana A., de Sousa J.P,2000, Using
metaheuristics in multi objective
resourceconstrained project scheduling,
European Journal of Operational Research,
120,359-374.
9. Ling Wang, Chen Fang, Ponnuthurai
Nagaratnam Suganthan, Min Liu , 2014,
Solving system-level synthesis problem by a
multi-objective estimation of distribution
algorithmOriginal Research Article, Expert
Systems with Applications, Volume 41, Issue
5, Pages 2496-2513,
10. SLowinski R. , B. Soniewicki, J. 1994,
We_glarz, DSS for multiobjective project
scheduling, European Journal of Operational
Research, 79, (2) , 220–229.
11. Dorner K.F., Gutjahr W.J., Hartl R.F., Strauss
C., Stummer C.,2008, Natureinspired
metaheuristics for multiobjective activity
crashing, Omega 3,6,1019-1037.
12. Blazewicz J., Ecker K., Pesch E., Schmidt G.,
Weglarz J.,2007, Handbook on Scheduling,
Springer, Berlin, Germany.
13. Pham D.T., Ghanbarzadeh A. ,2007, Multi-
Objective Optimisation using the Bees
Algorithm, Proceedings of IPROMS
Conference
14. Pham D. T. and Ghanbarzadeh A., 2007.
Multi-Objective Optimisation using the Bees
Algorithm,3rd International Virtual
Conference on Intelligent Production
Machines and Systems (IPROMS2007),
Whittles, Dunbeath, Scotland.
15. Amir Sadeghi; Abolfazl Kalanaki; Azadeh
Noktehdan; Azamdokht Safi Samghabadi;
Farnaz Barzinpour,2011,Using Bees Algorithm
to Solve the Resource Constrained Project
Scheduling Problem in PSPLIB,
Communications in Computer and Information
Science, 486-494.
16. Francisco Ballestín, Rosa Blanco , January
2011, Theoretical and practical fundamentals
for multi-objective optimisation in resource-
constrained project scheduling problems
Original Research Article , Computers &
Operations Research, Volume 38, Issue 1,
Pages 51-62.