towards social robotics on smartphones with simple xyzv sensor feedback
TRANSCRIPT

2015/11/29
Marat Zhanikeev [email protected] HCI研@別府
PDF: bit.do/151129
Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback

(dumb) Robotics Today
• most robots today are dumb• if you have all the necessary inputs, no room/need for AI, just use your inputs
• the case of HAL: weight shifting,bioelectricity, relative angles
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 2/192/19
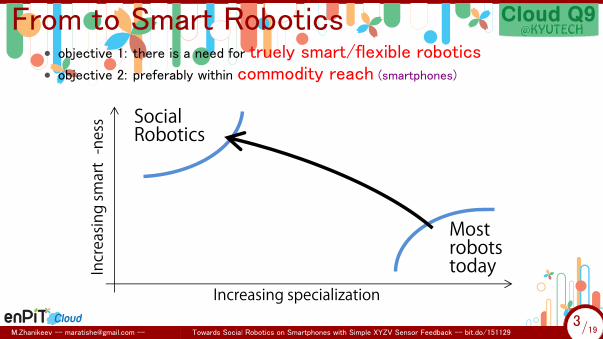
From to Smart Robotics• objective 1: there is a need for truely smart/flexible robotics• objective 2: preferably within commodity reach (smartphones)
Increasing specialization
Increasing smart-ness
Most robots today
Social Robotics
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 3/193/19

Social Robotics Basics
• basic idea: start with a blankrobot and teach it a task◦ humans are trainers
• optimization: reasoning byreinforcement learning
• complexity: reducesearch space via humanfeedback
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 4/194/19
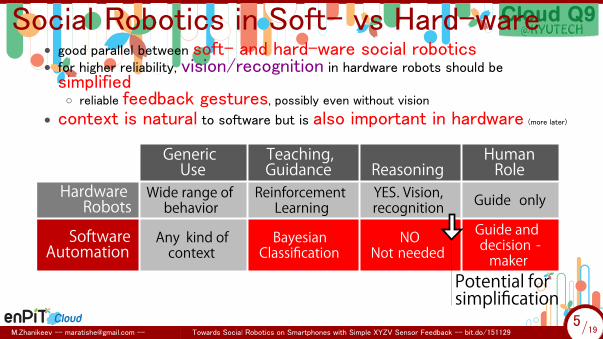
Social Robotics in Soft- vs Hard-ware• good parallel between soft- and hard-ware social robotics• for higher reliability, vision/recognition in hardware robots should besimplified◦ reliable feedback gestures, possibly even without vision
• context is natural to software but is also important in hardware (more later)
Generic Use
Teaching, Guidance Reasoning
Human Role
Hardware Robots
Wide range of behavior
Reinforcement Learning
YES. Vision, recognition Guide only
Software Automation
Any kind of context
Bayesian Classification
NO Not needed
Guide and decision - maker
Potential for simplification
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 5/195/19

Social Robotics in Context Management• example of software robot that processes folksonomy bigdata
Robot
(careless) Input
Human Human
{structure}
(pinpoint) Select
Browse (or use otherwise)
Some Knowledge
(folksonomies, knowledge bases, databases, indexes, ontologies, etc.)
(metromaps )
guide, trainer
sources, crowd
Recommendation Bot = Rebot
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 6/196/19

Social Robotics in Context (2)
0 5.2 10.4 15.6 20.8 26Time/Learning Sequence
0
4
8
12
16
20
Rebo
t Ord
er v
s Use
r Sel
ectio
n
Linear fit (circle bullets)Rebot: New TrainingRebot: Order of Selection in Rebot List
0 5.2 10.4 15.6 20.8 26Time/Learning Sequence
0
4
8
12
16
20
Rebo
t Ord
er o
f Use
r Sel
ectio
n
• starts off really dumn, but gets better with time
• diff between human and robot decisions decreases
• when diff is mostly zero, human trainer can go home
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 7/197/19

Social Robotics and Blackswans• a useful "show me only the blackswans" application
• useful in : disaster scenarios, literature reviews, etc.• crucial to remove human component as some point
Human judgment
Auto judgement
Folksonomy
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 8/198/19

Social Robotics and Blackswans (2)
Metromap Classifier
Human
Check Metromap
Fuzzy?
Cold? Hot?
Robot (Automatic Classification)
Bad
Input
No Yes
No
No
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 9/199/19

Simple XYZV Channel
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 10/1910/19

Model of Robotic Decision Making• on smartphones, easy access to XYZ gravity and V acceleration = XYZV input
• perfect if the same channel can be used for sensor input and human feedback
Model
Human
Robot
Actions
Constraints, logic
Same -channel interaction
Context management
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 11/1911/19

The Single-Channel Objective
Number of distinct data inputs
Reliability
Single-channel
Acceptable level
1
Dumb curve Smart curve
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 12/1912/19

Experiment (1)
• attach smartphone to one ankle• detect up-the-stairs steps• use human feedback to learn whichdetections are wrong
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 13/1913/19

Experiment (1) Feedback
1. smartphone notifies detected steps viavibration
2. human punishes smartphone for baddetections (negative feedback)
• stroke/hit your smarphone when it is wrong/bad
• jerk/shake a leg to loosen it up
• both are natural interactions for humans
• positive feedback is harder (so far)
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 14/1914/19

Experiment (1) : Resultsnegative mirror = moving average“Stroke” feedback x
yzv
“Jerk” feedback
Event detected
StepStroke
StepJerk
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 15/1915/19

Experiment (1) : Other Results
• about 100 experimental sessions
• 60% are FPs, 30% are FNs• within the FPs, in 90% of them stroke/jerk feedback was detected
◦ 3s timeout, detect unusual XYZV signal right after vibration◦ vibration itself is too small to register in XYZV
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 16/1916/19

Experiment (2) Context
• current work in progress
• idea: establish context first, then detect steps• experiment: walk with a smartphone in yourpocket
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 17/1917/19

Experiment (2) Context (2)xyzv
flat walking• horizontal/flatwalking
xyzvwalking up the stairs
• walking up thestairs
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 18/1918/19

That’s all, thank you ...
M.Zhanikeev -- [email protected] -- Towards Social Robotics on Smartphones with Simple XYZV Sensor Feedback -- bit.do/151129 19/1919/19