tracking
DESCRIPTION
Tracking. We are given a contour G 1 with coordinates G 1 ={ x 1 , x 2 , … , x N } at the initial frame t=1, were the image is I t=1 . We are interested in tracking this contour through several image frames, say through T image frames given by - PowerPoint PPT PresentationTRANSCRIPT

Computer Vision November 2003 L1.1© 2003 by Davi Geiger
Tracking
We are given a contour with coordinates ={x1 , x2 , … , xN} at the initial frame were the image is IWe are interested in tracking this contour through several image frames, say through T image frames given by
We will denote each of these contours by t and so 1 = t=1 . We will track each of the coordinates of the initial contour, i.e., we will focus on the tracking of the N initial coordinates. Thus, at any time the new contour will be characterized by t = {x1 , x2 , … , xN }, and these coordinates need not be connected. In order to create a connected contour at each frame one may fit a spline or another form of linking of this sequence of N coordinates. In a Bayesian framework we attempt to obtain the probability
)1()|( 11 Ip
11,...,, IIII TTT
We can make measurements at each image frame, accumulate them over time denoting by and we ask “Which state (coordinates) the contour will be at that time given all the measurements ?”
1I

Computer Vision November 2003 L1.2© 2003 by Davi Geiger
Propagating Probability Density
)2()|(),|()|(
),|(
)|,()|(
),|(
)|()|(
),|(
)|(),|()|(
1
),|()|(
11
11
11
11
11
11
1111
1111
dIPIpIIp
IIp
dIpIIp
IIp
IpIIp
IIp
IpIIpIIp
IIPIP
An interesting expansion of (1) is given by:
Assuming that such probabilities can be obtained, namely
than we have a recursive method to estimate,)|(),,|(),,|( 1111 IIpIpIIp
)|( 11 IP
PredictCorrect or make
Measurements)|(),|()|,( CBPCBAPCBAP
)|(),|()|(
1),|( :)on al(condition sBaye' CAPCABP
CBPCBAPC
B
CBAPCAP )|,()|( :yProbabilit Marginal

Computer Vision November 2003 L1.3© 2003 by Davi Geiger
Assumptions
Independence assumption on data generation, i.e., the current state completely defines the probability of the measurements/data (often the previous data is also neglected)
First order Markov process, i.e., the current state of the system is completely described by the immediate previous state, and possibly the data (often the data is also neglected).
)|( 1 IIp
)|(
),|(
1
1
p
or
Ip
)|(
),|(
11
11
Ip
or
IIp
This is a normalization constant that can always be computed by normalizing the recurrence equation (2)

Computer Vision November 2003 L1.4© 2003 by Davi Geiger
Linear Dynamics
);()|(
);()|( 111
m
d
MNIp
DNp
matrices.linear are and .matrix covariance and r mean vectowith
Gaussian a i.e., ,on distributi normal blemultivaria theis );(where
DM
N
Examples
Random Walk
Points moving with constant velocity
Points moving with constant acceleration
Periodic motion

Computer Vision November 2003 L1.5© 2003 by Davi Geiger
noise todue ismotion all
10
01);()|( 1111
DxDNxxpy
xx dx
Drift: New position is the previous one plus noise d
Random Walk of a Point
Computer Vision November 2003 L1.6© 2003 by Davi Geiger
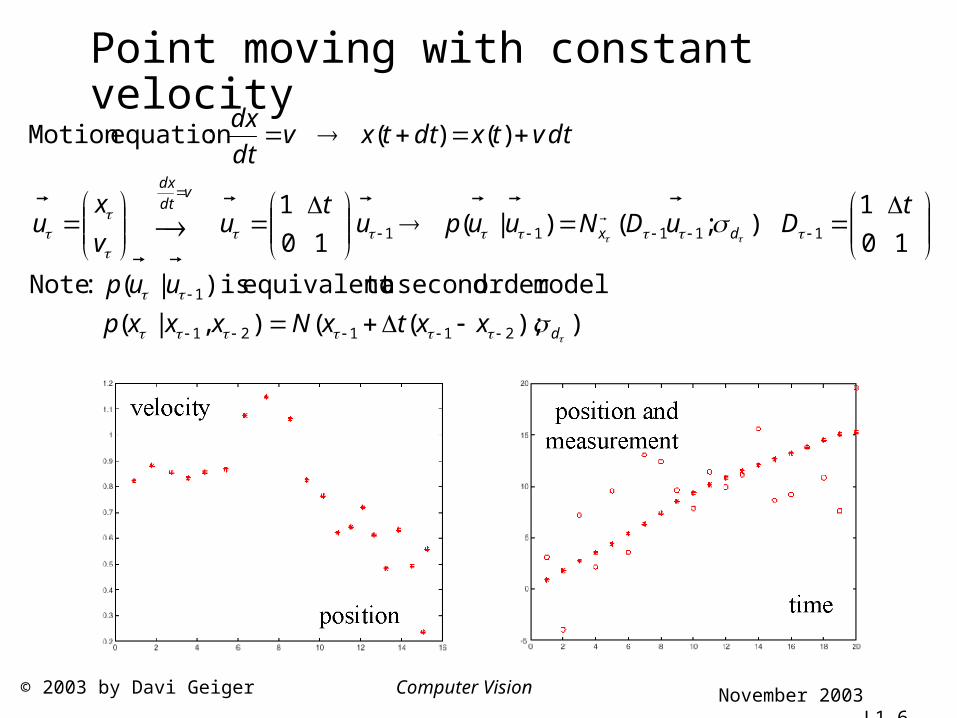
Point moving with constant velocity
));((),|(
modelorder second a toequivalent is)|( :Note
10
1);()|(
10
1
)()( :equationMotion
21121
1
11111
d
dx
vdt
dx
xxtxNxxxp
uup
tDuDNuupu
tu
v
xu
dtvtxdttxvdt
dx

Computer Vision November 2003 L1.7© 2003 by Davi Geiger
Point moving with constant acceleration
d
du
xxxtxxtxNxxxxp
dtadttvtxtxuup
t
t
DuDNuup
a
v
x
u
dtatvdttv
);2()(2
1)(),,|(
,)(2
1)()()(using model,order thirda toequivalent is)|(:Note
100
10
01
);()|(
)()( :onacceleraticonstant h Motion wit
2312
211321
21
1111

Computer Vision November 2003 L1.8© 2003 by Davi Geiger
Point moving with periodic motion
0
0);()|(
)()()()(
)()()()( equations coupledorder first toequivalent
cos)(solution periodic)( :Motion Periodic
1111
2
2
t
tDuDNuup
v
xu
dttxtvdttvtxdt
dv
dttvtxdttxtvdt
dx
tAtxtxdt
xd
du

Computer Vision November 2003 L1.9© 2003 by Davi Geiger
111111
1 )|(),|()|(
),|()|(
1
dxIxPIxxpIIp
IxIpIxP
x
Tracking one point (dynamic programming like)
Equation (2) is written as
t
)|( 11 xIP
)|( 1 xxp
xx
x
IxFIIpIxF
IxFIxP
IxPIxxpIxIpIxF
)|()|(: thatnote)|(
)|()|(
)|(),|(),|()|(
1
11111
1
)|( xIp
x1x
)|( IxP
)|( 11 IxP

Computer Vision November 2003 L1.10© 2003 by Davi Geiger
Kalman Filter (Special Case of a Linear System)Simplify calculation of the probabilities due to good Gaussian properties (applied to ) ),|(and),|( 111 IpIIp
)|( IP
111111
1 )|(),|()|(
),|()|(
1
dIPIpIIp
IIpIP
Reminder: From equation (2) we have
1D case: For one dimension point and Gaussian distributions
11111
)|();()|(
);()|(
1
dxyxPxdNyyp
xmNyxP
x
dxmy
Kalman observed the recurrence: if
then
where
);()|( 1111 1
x
NyxP
21
222
2
)(,)()(
)(
ddm
m22
21
2
)(
)(and
m
m
m
dym
);()|( x
NyxP
Computer Vision November 2003 L1.11© 2003 by Davi Geiger
Then
21
21
11'
21
2111'
1'
11111
111
)()(;);(
)(
)()(;);(
)(,
);();();(
)(
);();();()|(
1
1
1
1
1
1
ddNmymNc
i
ddxdNxmNc
iidcc
dxNdxdNxmNdc
i
dxNxdNxmNcyxP
dxmx
dmy
x
x
dxmy
x
x
dxmy
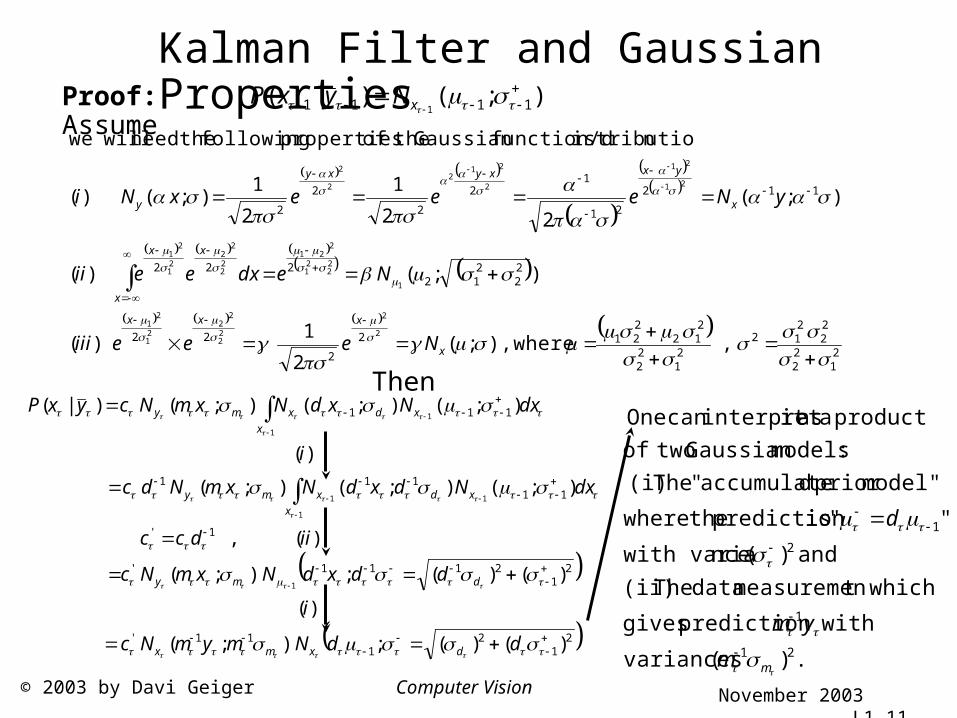
Kalman Filter and Gaussian PropertiesProof: Assume );()|( 1111 1
x
NyxP
21
22
22
212
21
22
212
2212
2
22
22
212
222
112
21
12
2
2
2
, where),;(2
1)(
);()(
);(22
1
2
1);()(
nistributiofunction/dGaussian theof properties following theneed willwe
2
2
22
22
21
21
1
22
21
221
22
22
21
21
21
21
2
212
2
2
x
xxx
x
-x
x
x
yxxyxy
y
Neeeiii
Nedxeeii
yNeeexNi
.)( variances
with prediction gives
t which measuremen data The (ii)
and)( ncewith varia
"" is prediction thewhere
model"prior daccumulate" The (i)
:modelsGaussian twoof
product a asit interpret can One
21
1
2
1
mm
ym
d

Computer Vision November 2003 L1.12© 2003 by Davi Geiger
Kalman Filter …(continuing the proof)
;
)(
)(;
)(
)(
)()(
)()(;
)()(
)()(
)(
)()(;);(
...)|(
22
22
22
21
2
212
221
212
211
21'
21
21
11'
x
m
m
m
mx
m
m
m
mx
dxmx
N
mm
dymN
m
m
m
mdymNc
iii
ddNmymNc
yxP
Computer Vision November 2003 L1.13© 2003 by Davi Geiger
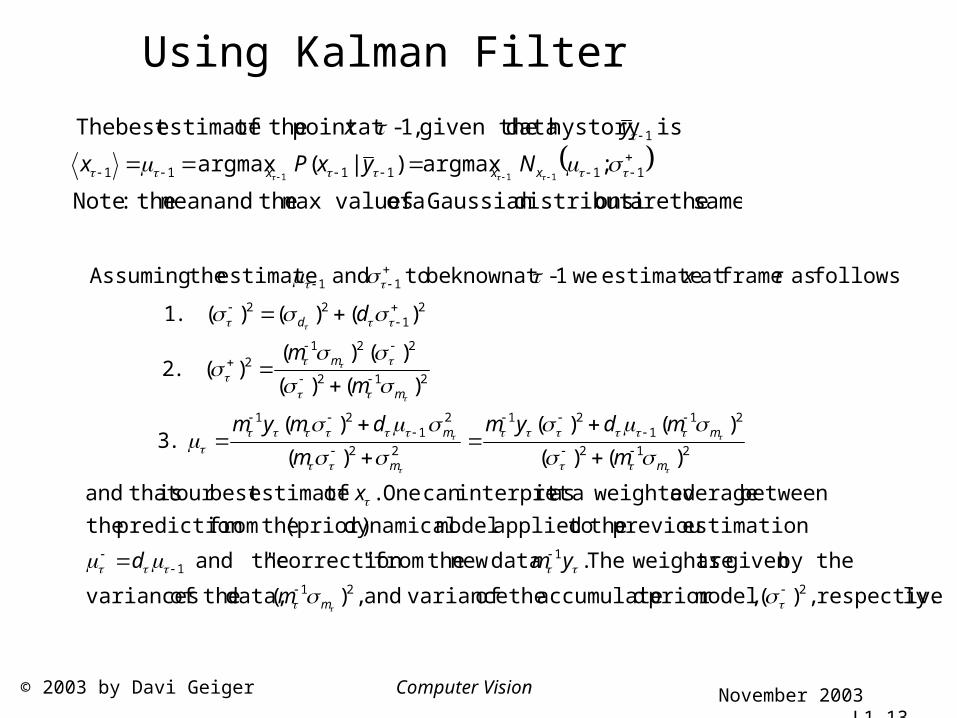
Using Kalman Filter
ly.respective ,)(,modelprior daccumulate theof varianceand ,)( data, theof variances
by thegiven are weightsThe. data new thefrom "correction" theand
estimationpreviou the toapplied model dynamical (prior) thefrom prediction the
between average weighteda asit interpret can One. of estimatebest our is that and
)()(
)()(
)(
)(.3
)()(
)()()(.2
)()()(.1
follows as frameat estimate we 1-at known be to and estimate theAssuming
221
11
212
211
21
22
21
21
212
2212
21
22
11
m
m
m
m
m
m
m
d
m
ymd
x
m
mdym
m
dmym
m
m
d
τx
same theare onsdistributiGaussian a of max values theandmean the:Note
; argmax)|( argmax
is hystory data given the,1-atpoint theof estimatebest The
111111
1
111
xxx NyxPx
yx
Computer Vision November 2003 L1.14© 2003 by Davi Geiger
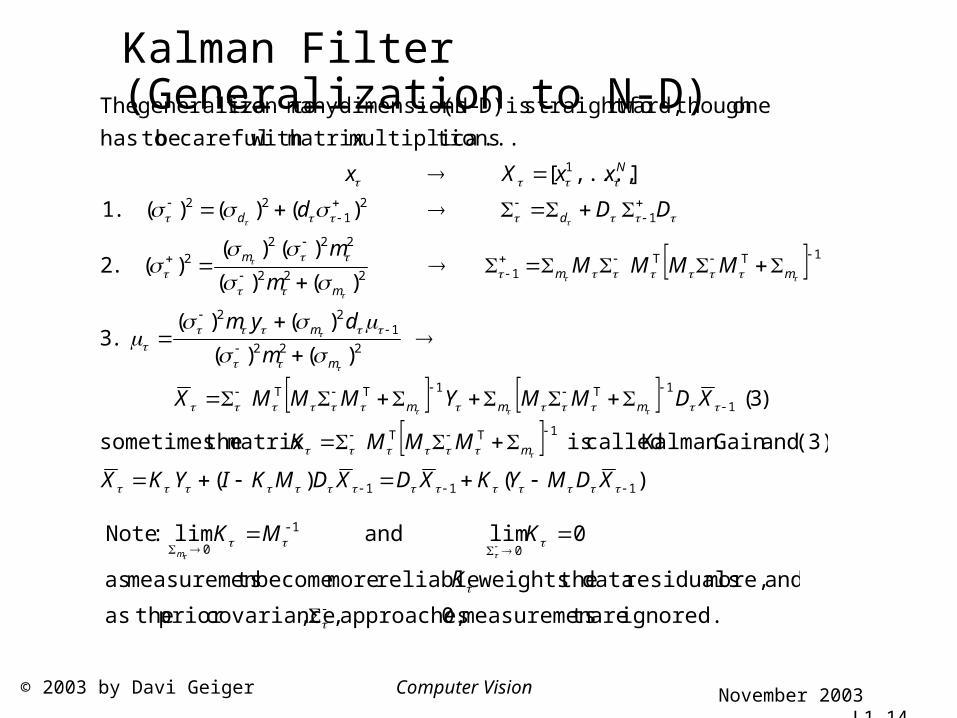
Kalman Filter (Generalization to N-D)
)()(
(3)andGain Kalman called is matrix thesometimes
)3(
)()(
)()(.3
)()(
)()()(.2
)()()(.1
],...,[
... tionsmultiplicamatrix with careful be tohas
one though rward,straightfo is D)-(N dimensionsmany tion togeneraliza The
111
1TT
1
1T1TT
222
122
1TT1222
2222
12
122
1
XDMYKXDXDMKIYKX
MMMK
XDMMYMMMX
m
dym
MMMMm
m
DDd
xxXx
m
mmm
m
m
mmm
m
dd
N
ignored. are tsmeasuremen 0, approaches, ,covarianceprior theas
and more, residuals data theweights reliable more become tsmeasuremen as
0lim andlim :Note0
-1
0
K
KMKm