transductores electricos
TRANSCRIPT

UNIVERSIDAD ICEL CAMPUS ERMITA
INGENIERIA EN SISTEMAS COMPUTACIONALESMATERIA: ELECTRONICA 1ER. CUATRIMESTRE
NOMBRE DEL PROFESOR: ING. ROBERTO BADILLO TRISTAN
NOMBRE DEL ALUMNO: LAZARO GUTIERREZ ALCAUTER
MATRICULA: 301007FUENTE DE LA INVESTIGACION: UNIVERSIDAD
NACIONAL DEL SUR - DEPARTAMENTO DE INGENIERÍA
ELECTRICA Y DE COMPUTADORAS AREA 7 - LABORATORIO DE MEDIDAS ELECTRICAS 2
(Cod.2774)

QUE ES UN TRANSDUCTOR ELECTRONICO?
El término transductor ha sido aplicado a dispositivos, o combinaciones de dispositivos, que convierten
señales, o energía, de una forma física a otra forma. Más específicamente, en sistemas de medición, un transductor se define como un dispositivo que provee una salida usable, en respuesta a una medida
especificada. La medida es "una cantidad física, propiedad o
condición, la cual es medida" y la salida es una "cantidad eléctrica, producida por un transductor, que es función de la medida".

TRANSDUCTORES ELECTRICOS

TRANSDUCTOR ACTIVO
Los transductores activos son aquellos que generan un voltaje de salida por si mismos. Las salidas autogeneradas
son usualmente de bajo nivel y requieren una etapa posterior de amplificación.


TRANSDUCTOR PASIVO Se Llaman transductores pasivos a
aquellos que requieren una fuente eléctrica externa como excitación.
En ellos, la magnitud medida produce un cambio en un elemento eléctrico pasivo del circuito (resistencia,
capacitor, o inductancia).

EJEMPLO DE TRANSDUCTOR PASIVO

Clasificación de Transductores
Se puede clasificar los transductores según distintos puntos de vista. Por ejemplo:
Si necesitan excitación externa (pasivos o �activos)
Por el tipo de salida (analógica o digital)� Por el principio de funcionamiento� Por la magnitud que miden, aunque esta �
clasificación presenta la dificultad de que un mismo transductor
puede medir diversas magnitudes.

EJEMPLOS DE TRANSDUCTORES

QUE SON LOS ACTUADORESELECTRICO?
Los actuadores electricos son los mas extendidos y los que poseen un mayor campo de aplicacion dada la facil disponibilidad de la energia electrica atraves de las redes de distribucion.
Ademas son altamente versatiles debido a que se utilizan cables electricos para transmitir senales de control y la electricidad, por lo que practicamente no hay restricciones respecto a la distancia entre la fuente de poder y el actuador.

De echo hay actuadores que dependen de una etapa previa realizada por un accionamiento electrico, como son los actuadores neumaticos o hidraulicos
( un accionamiento electrico debe mover inicialmente un compresor o una bomba ), o el los gravitorio (donde previamente se tiene que desplazar el elemento que caera por gravedad al sitio por el que caera), etc.
Existe una gran cantidad de modelos y es facil utilizarlos con motores electricos estandarizados segun la aplicacion.


TIPOS DE ACTUADORES.
Motores de corriente alterna. . Monofasicos. . Trifasicos.Motores de corriente continua.. Bobinados en derivacion..Bobinados en serie.. Exitacion independiente.Motores paso a paso.Servomotores.Motor universal.

MONOFASICOS.
Este tipo de motores poseen una unica face y un neutro. Sirven unicamente para potencias pequenas o medias (< 3kw). Poseen el incoveniente de necesitar de un arrancador.

MOTORES DE CORRIENTE ALTERNA.
Son en general motores robustos, sencillos, seguros, compactos y que necesitan poco mantenimiemto. Ademas suelen ser mas baratos que los motores de corriente continua para potencias equivalentes, se considera el motor industrial por excelencia.

TRIFASICOS.
Presentan las mismas caracteristicas que los monofasicos, con la diferencia de que se pueden poner en marcha sin nesecidad de arrancador. Se construye para potenias mayores.

MOTORES DE CORRIENTE CONTINUA.
Este tipo de motores son pesados, caros y necesitan bastante mantenimiento, debido al chisporroteo continuo de las escobillas.
No obstante, eran la mejor opcion para las aplicaciones en las que se nesecitaba controlar la velocidad y/o el par asta que se desarrollo el variador de frecuencia, aparato que subsana esta carencia de los motores asincronos.
Tambien se utilizan en aquellos sitios donde la alimentacion probiene de una bateria. La velocidad es facilmente ajustable poniendo unicamente reostato (resistencia variable), en el inductor.

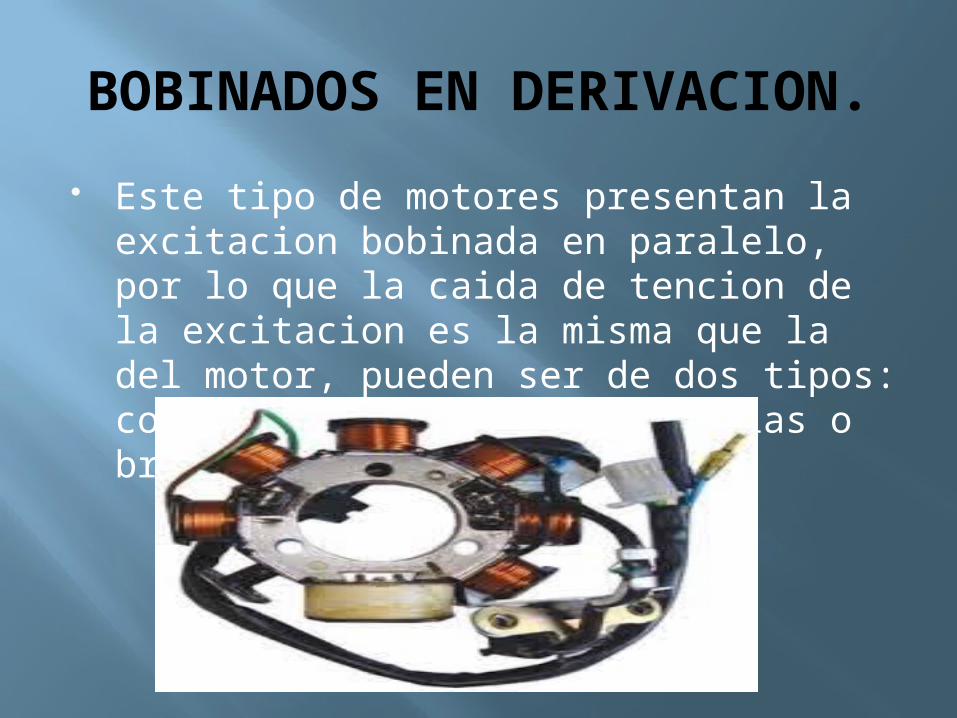
BOBINADOS EN DERIVACION.
Este tipo de motores presentan la excitacion bobinada en paralelo, por lo que la caida de tencion de la excitacion es la misma que la del motor, pueden ser de dos tipos: con escobillas y sin escobillas o brushlees (en ingles).

CON ESCOBILLAS.
Presentan inconvenientes en cuanto al mantenimiento, ya que las bobinas chisporrotean continuamente y se desgastan.

SIN ESCOBILLAS O BRUSHLEES:
Presentan un menor costo de mantenimiento al funcionar sin escobillas.

BOBINADOS EN SERIE.
Este tipo de motores presentan la excitacion bobinada en serie, por lo que la caida de tension de la excitacion no es fija. Al igual que los motores con excitacion en paralelo, pueden ser con escobillas o sin escobillas o brushlees.

CON EXCITACION INDEPENDIENTE.
Este tipo de motores presentan la alimentacion del devanado inductor mediente una fuente de alimentacion externa a la maquina. Por este motivo, es muy facil controlar su velocidad variando unicamente la corriente de excitacion. Con este tipo de motores se puede controlar la velocidad del mismo incluso en lazo abierto.
MOTORES PASO A PASO.
Son dispositivos electromagneticos, rotativos, incrementales que convierten pulsos digitales en rotacion mecanica. La cantidad de rotaciones directamnte proporsional al numero de pulsos y la velocidad de rotacion es relativa a la frecuencia de dichos pulsos. Este tipo de motores avanzan a impulsos un angulo prefijado. Gereralmente se utilizan alimentados mediante un dispositivo programable que es el que le suministra los impulsos. Mediante este tipo de motores se consigue un motor de posicion aseptable a bajo costo, siempre y cuando la inercia del sistema sea baja ( el sistema tarda poco en ecelerarse y frenarse)
Su uso mas abitual es en aparatos de pequena potencia, tales como impresoras, escaner, ect.

SERVOMOTORES.
Es un motor de corriente continua, que tiene la capicidad de ubicarse en cualquier posicion dentro de su rango de operacion y mantenerse estable en dicha posicion. El control de posicion del motor se realiza en lazo cerrado, con lo que se consigue un control de la posicion muy preciso, con requisitos de mantenimiento minimos. Se utilizan en maquinas de presicion, tales como maquinas-herramientas, robots, impresoras, plotters, actuadores de control de superficie de aeronaves, etc. Las ventajas que tales motores ofrecen incluye un momento de torsion elevado, un modelo pequeno de estructura y una carga ligera, asi como una curva de velocidad lineal, la cual reduce el esfuerzo computacional.

MOTOR UNIVERSAL.
Sirven para pequenos electrodomesticos (pequenas potencias), como taladoras, batidoras, etc., donde se requiere gran velocidad con cargas debiles. Se pueden conectar tanto a corriente continua como a corriente alterna.