transformation wen-chieh (steve) lin department of computer science & institute of multimedia...
Post on 20-Dec-2015
224 views
TRANSCRIPT

TransformationTransformation
Wen-Chieh (Steve) Lin
Department of Computer Science &
Institute of Multimedia Engineering
Rich Riesenfeld’s CG Slides,
Shirley, Fundamentals of Computer Graphics, Chap 6.2—6.5, 5.2

ILE5014 Computer Graphics 10F 2
Uses of TransformationsUses of Transformations
• Modeling transformations– build complex models by positioning
simple components
– transform from object coordinates to world coordinates
• Viewing transformations– placing the virtual camera in the
world
– i.e. specifying transformation from world coordinates to camera coordinates
• Animation– vary transformations over time to
create motion
WORLD
OBJECT
CAMERA

ILE5014 Computer Graphics 10F 3
Brief Review on BasesBrief Review on Bases
• A basis is a linearly independent set of vectors whose combinations will get you anywhere within a space, i.e. span the space
• n vectors are required to span an n-dimensional space
• If the basis vectors are normalized and mutually orthogonal, the basis is orthonormal

ILE5014 Computer Graphics 10F 4
Brief Review on Bases (cont.)Brief Review on Bases (cont.)
• There are lots of possible bases for a given vector space; there’s nothing special about a particular basis—but our favorite is probably one of these.
y
x
z
zx
y

ILE5014 Computer Graphics 10F 5
Vectors Represented in a BasisVectors Represented in a Basis
Every vector has a unique representation in a given basis
• V = v1E1 + v2E2 + … vnEn
• The vectors {E1, E2, …, En} are the basis
• The scalars (v1, v2, …, vn) are the components or coordinates of V with respect to that basis
• Changing the basis changes the components, but not the vector

ILE5014 Computer Graphics 10F 6
Linear TransformationLinear Transformation
• A function (or map, or transformation) F is linear if F(A+B) = F(A)+F(B) and F(kA) = kF(A)
for all vectors A and B, and all scalars k.
• Any linear map is completely specified by its effect on a set of basis vectors:
V = v1E1 + v2E2 + v3E3
F(V) = F(v1E1 + v2E2 + v3E3) = F(v1E1 ) + F(v2E2 ) + F(v3E3) = v1F(E1 ) + v2F(E2 ) + v3F(E3)

ILE5014 Computer Graphics 10F 7
Example: Rotation of a BasisExample: Rotation of a Basis
,
,
,
E1
E2
E3
E’1
E’2
E’3
E’i=F(Ei)
V = v1E1 + v2E2 + v3E3
F(V) = F(v1E1 + v2E2 + v3E3) = F(v1E1 ) + F(v2E2 ) + F(v3E3) = v1F(E1 ) + v2F(E2 ) + v3F(E3) = v1E’1 + v2E’2 + v3E’3

ILE5014 Computer Graphics 10F 8
Transforming a Vector
• The coordinates of the transformed basis vector (in terms of the original basis vectors):
The transformed general vector V becomes:
and its coordinates (still w.r.t. the original basis) are
The matrix multiplication formula!v1 = (f11v1 + f12v2 + f13v3)v2 = (f21v1 + f22v2 + f23v3)v3 = (f31v1 + f32v2 + f33v3)
33122111)( EEEE 11 fffF
332222122 )( EEEE 1 fffF 333223133)( EEEE 1 fffF
F(V) = v1F(E1 ) + v2F(E2 ) + v3F(E3) = (f11E1+f21E2+f31E3)v1 + (f12E1+f22E2+f32E3)v2 + (f13E1+f23E2+f33E3)v3
=(f11v1+ f12v2 + f13v3)E1 + (f21v1+ f22v2+ f23v3) E2 + (f31v1+ f32v2 + f33v3)E3

ILE5014 Computer Graphics 10F 9
Brief Review on MatricesBrief Review on Matrices
• An nxn matrix F represents a linear function in n dimensions
– i-th column shows what the function does to the corresponding basis vector
3
2
1
333231
232221
131211
3
2
1
ˆ
ˆ
ˆ
v
v
v
fff
fff
fff
v
v
v

ILE5014 Computer Graphics 10F 10
Brief Review on MatricesBrief Review on Matrices
• Transformation = linear combination of columns of F
– first component of the input vector scales first column of the matrix
– accumulate into output vector
– repeat for each column and component
3
2
1
333231
232221
131211
3
2
1
ˆ
ˆ
ˆ
v
v
v
fff
fff
fff
v
v
v

ILE5014 Computer Graphics 10F 11
Brief Review on MatricesBrief Review on Matrices
• Usually compute it a different way:
– dot row i with input vector to get component i of output vector
3
2
1
333231
232221
131211
3
2
1
ˆ
ˆ
ˆ
v
v
v
fff
fff
fff
v
v
v

ILE5014 Computer Graphics 10F 12
Aside: Matrix DecompositionAside: Matrix Decomposition
• Any matrix M can be decomposed via singular value decomposition (SVD) into a rotation times a scale times another rotation
• If M is symmetric,
• See Chap. 5.2.7 for SVD
M = R1SR2
M = RSR-1

ILE5014 Computer Graphics 10F 13
Basic 2D TransformationsBasic 2D Transformations
• Translation
• Scaling
• Rotation about origin by Ө

ILE5014 Computer Graphics 10F 14
Basic 2D Transformations (cont.)Basic 2D Transformations (cont.)
• Shear
y
ayx
y
xaShx 10
1
ybx
x
y
x
bShy 1
01
y
yx
y
xShx
tan
10
tan1

ILE5014 Computer Graphics 10F 15 15x x
y
y
yx
y
xShx
tan
10
tan1
y tanΦ
Φ
Geometric View of Shear in xGeometric View of Shear in x

ILE5014 Computer Graphics 10F 16
Affine TransformationAffine Transformation
• A function F is affine if it is linear plus a translation
– Thus the 1-D transformation y = mx + b is not linear, but affine
– Similarly for a translation and rotation of a coordinate system
– Affine transformations preserve lines

ILE5014 Computer Graphics 10F 17
Homogeneous CoordinatesHomogeneous Coordinates
• Translation is not linear--how to represent it as a matrix?
• Trick: add extra coordinate to each vector
• This extra coordinate is the homogeneous coordinate, or w
1100
10
01
1
y
x
t
t
y
x
y
x

ILE5014 Computer Graphics 10F 18
Homogeneous CoordinatesHomogeneous Coordinates
• When extra coordinate is used, vector is said to be represented in homogeneous coordinates
• The associated transformation matrices Homogeneous Transformations
• Drop extra coordinate after transformation (project to w=1)
11001
2221
1211
y
x
tff
tff
y
x
y
x

ILE5014 Computer Graphics 10F 19
w!? Where did that come from?w!? Where did that come from?
• Practical answer:– w is a clever algebraic trick.
– Don’t worry about it too much. The w value will be 1.0 for the time being.
– If w is not 1.0, divide all coordinates by w to make it so.

ILE5014 Computer Graphics 10F 20
w!? Where did that come from?w!? Where did that come from?
• Clever Academic Answer:
– (x, y, w) coordinates form a 3D projective space.
– All nonzero scalar multiples of (x, y, 1) form an equivalence class of points that project to the same 2D Cartesian point (x, y).
– For 3-D graphics, the 4D projective space point (x, y, z, w) maps to the 3D point (x, y, z) in the same way.

ILE5014 Computer Graphics 10F 21
Homogeneous 2D TransformationsHomogeneous 2D Transformations
• The basic 2D transformations becomeTranslate: Scale: Rotate:
• Any affine transformation can be expressed as a combination of these.
• We can combine homogeneous transforms by multiplication.
• Now any sequence of translate/scale/rotate operations can be collapsed into a single homogeneous matrix
100
10
01
y
x
t
t
100
00
00
y
x
s
s
100
0cossin
0sincos

ILE5014 Computer Graphics 10F 22
Location and Direction in 2D Homogeneous CoordinatesLocation and Direction in 2D Homogeneous Coordinates
• Location
• Direction
• Homogeneous coordinates can elegantly represent the translational invariance of a direction vector!
1
y
x
p
0
y
x
v
11100
10
01
' x
x
y
x
ty
tx
y
x
t
t
p
vv
00100
10
01
' y
x
y
x
t
t
y
x

ILE5014 Computer Graphics 10F 23
Composition of TransformationComposition of Transformation
• Build compound transformations by stringing basic ones together, e.g.
– “first apply a scale S, and then a rotation R
V3 = R(SV1)
V2 = SV1, then V3 = RV2

ILE5014 Computer Graphics 10F 24
Composition of TransformationComposition of Transformation
• Any sequence of linear transformations can be collapsed into a single matrix formed by multiplying the individual matrices together
• This is good: can apply a whole sequence of transformation at once
V3 = R(SV1)
V2 = SV1, then V3 = RV2 V3 = MSV1
M = RS
M = M1M2 ...Mn

ILE5014 Computer Graphics 10F 25
Sequences of TransformationsSequences of Transformations
• Often the same transformations are applied to many points
• Calculation time for the matrices and combination is negligible compared to that of transforming the points
• Reduce the sequence to a single matrix, then transform
M
M
M
x x x x x x x x x x
x' x' x' x' x' x' x' x' x'
PA
RA
ME
TE
RS
MA
TR
ICE
S
UNTRANSFORMED POINTS
TRANSFORMED POINTS

ILE5014 Computer Graphics 10F 26
Order of Transformations Does Matter!Order of Transformations Does Matter!
• Matrix multiplication isn’t commutative!

ILE5014 Computer Graphics 10F 27
Post Multiply vs. Pre MultiplyPost Multiply vs. Pre Multiply
• Consider the composite function ABCD, i.e. p’ = ABCDp
• Matrix multiplication is associative, so we can calculate from right to left or left to right: ABCD = (((AB) C) D) = (A (B (CD))).
• Iteratively replace either the leading or the trailing pair by its product
• Postmultiply: left-to-right (reverse of function application.)
• Premultiply: right-to-left (same as function application.)
• Postmultiply: left-to-right (reverse of function application.)
• Premultiply: right-to-left (same as function application.)
M D
M CM
M BM
M AM
M A
M MB
M MC
M MD
or both give the same result.
Premultiply Postmultiply

ILE5014 Computer Graphics 10F 28
Column Vector ConventionColumn Vector Convention
• The convention in the previous slides
– transformation is by matrix times vector, Mv
– textbook uses this convention, 90% of the world too
• The composite function A(B(C(D(x)))) is the matrix-vector product ABCDx
11
333231
232221
131211
y
x
mmm
mmm
mmm
y
x
ILE5014 Computer Graphics 10F 29
Beware: Row Vector Convention
• The transpose is also possible
• How does this change things?– all transformation matrices must be transposed
– ABCDx transposed is xTDTCTBTAT
– pre- and post-multiply are reversed
• OpenGL uses transposed matrices!– You only notice this if you pass matrices as arguments to
OpenGL subroutines, e.g. glLoadMatrix.
– Most routines take only scalars or vectors as arguments.
332313
322212
312111
11
mmm
mmm
mmm
yxyx

ILE5014 Computer Graphics 10F 30
Windowing TransformationWindowing Transformation
• [a, A] x [b, B] [c, C] x [d, D]
• Translate(-a, -b)
• Scale
• Translate(c, d)
100
10
01
100
00
00
100
10
01
b
a
bB
dDaA
cC
d
c
M

ILE5014 Computer Graphics 10F 31
Basic 3D TransformationsBasic 3D Transformations
• 3-D transformations are very similar to the 2-D case
• Homogeneous coordinate transforms require 4x4 matrices
• Scaling and translation matrices are simply:
1000
100
010
001
z
y
x
t
t
t
1000
000
000
000
z
y
x
S
S
S

ILE5014 Computer Graphics 10F 32
3D Rotation Matrices3D Rotation Matrices
• Rotation is a bit more complicated in 3-D
• More possible axes of rotation
• e.g., rotate about z-axis: only x and y coordinate change
1000
0100
00cossin
00sincos
Rotate-z(Φ) =

ILE5014 Computer Graphics 10F 33
3D Rotation Matrices about x- and y- axes3D Rotation Matrices about x- and y- axes
1000
0cossin0
0sincos0
0001
Rotate-x(Φ) =
1000
0cos0sin
0010
0sin0cos
Rotate-y(Φ) =

ILE5014 Computer Graphics 10F 34
Properties of Rotation MatricesProperties of Rotation Matrices
• Rotation matrices are orthonormal
– Rows/Columns are mutually orthonormal
– Rows/Columns form a Cartesian coordinate
• Geometrically, R-1(θ) = R(-θ)
• Algebraically, R-1(θ) = RT(θ)
– Prove by yourself that RT(θ)R(θ) = R(θ)RT(θ) = I using orthonormality of R
• R-1(θ) = R(-θ) = RT(θ)

ILE5014 Computer Graphics 10F 35
Arbitrary 3D Rotations Arbitrary 3D Rotations
• Can we construct an arbitrary 3D rotation using basic rotation matrices Rx() Ry() Rz()?
y
x
a+θ
α
z

ILE5014 Computer Graphics 10F 36
Rotate + about axis a: Ra(+ ) Rotate + about axis a: Ra(+ )
y
z
x
a+θ
α

ILE5014 Computer Graphics 10F 37
First, Rotate about z by : Rz( ) First, Rotate about z by : Rz( )
Now in the
(y-z)-plane
y
z
x
a
α
+α

ILE5014 Computer Graphics 10F 38
Then Rotate about x by + : Rx( ) Then Rotate about x by + : Rx( )
Rotate in the
(y-z)-plane
y
z
x
a
+β
+β

ILE5014 Computer Graphics 10F 39
Now, + Rotation about z-axis: Rz(+ )Now, + Rotation about z-axis: Rz(+ )
Now aligned with z-axis
39
y
z
x
a
+θ

ILE5014 Computer Graphics 10F 40
Then rotate about x by - : Rx(- ) Then rotate about x by - : Rx(- )
Rotate again in
the (y-z)-plane
y
z
x
a
-β
-β

ILE5014 Computer Graphics 10F 41
Now, + Rotation about z by : Rz( ) Now, + Rotation about z by : Rz( )
Now to original position of a
y
z
x
a-α
-α

ILE5014 Computer Graphics 10F 42
We Effected + rotation about Arbitrary axis a: Ra(+ ) We Effected + rotation about Arbitrary axis a: Ra(+ )
y
z
x
a
y
z
x
+θ
α
)()()( RRR z xa )( Rz)()( RRx z

ILE5014 Computer Graphics 10F 43
Rotation about Arbitrary AxisRotation about Arbitrary Axis
• Rotation about a-axis effected by (nonunique) composition of 5 elementary rotations
• We show arbitrary rotation as succession of 5 rotations about coordinate axes

ILE5014 Computer Graphics 10F 44
1000
0)cos()sin(0
0)sin()cos(00001
10000100
00)cos()sin(
00)sin()cos(
)(
Ra
1000010000cossin00sincos
1000
0cossin0
0sincos00001
1000010000cossin00sincos
)( Rz
In matrix terms, Ra(+ ) = )( Rz
)( Rx
)( Rx
)( Rz

ILE5014 Computer Graphics 10F 45
Euler Angles for 3-D RotationsEuler Angles for 3-D Rotations
• Euler angles - 3 rotations about each coordinate axis, however
– angle interpolation for animation generates bizarre motions
– rotations are order-dependent, and there are no conventions about the order to use
• Widely used anyway, because they're “simple”
• Coordinate axis rotationsRotate-x(Φ)Rotate-y(θ)Rotate-z(φ)

ILE5014 Computer Graphics 10F 46
Euler Angles for 3-D RotationsEuler Angles for 3-D Rotations
• Roll, pitch, yaw angle

ILE5014 Computer Graphics 10F 47
QuaternionsQuaternions
• Complex numbers can represent 2-D rotations
• Quaternions, a generalization of complex numbers, can represent 3-D rotations
• Quaternions represent 3-D rotations with 4 numbers:
– 3 give the rotation axis - magnitude is sin(α/2)
– 1 gives cos(α/2)
– unit magnitude - points on a 4-D unit sphere

ILE5014 Computer Graphics 10F 48
What is a Normal?What is a Normal?
• Indication of outward facing direction for lighting and shading
Order of definition ofvertices in OpenGL
Right hand rule
Note: GL conventions… glFrontFace(GL_CCW) glFrontFace(GL_CW)

ILE5014 Computer Graphics 10F 49
Transforming Normal VectorsTransforming Normal Vectors
• If we transform normals like points
• We need a different rule to transform normals.

ILE5014 Computer Graphics 10F 50
Normals Transform Like PlanesNormals Transform Like Planes
plane transform to
point transform to
spacedtransforme in plane on point for equation
spaceoriginal in plane on point for equation
TTT
T
T
T
T
TTT
da,b,c
zyxdcba
dczbyax
nMMnn
Mpp
pn
MpMn
pMMn
Ipn
np
pnpnpn
11
1
1
)(
))((
)(
0
:magic some do answer, thefind To
? transform should how ed, transformis If
offset. theis normal, plane theis )(
1 , where,0
writtenbecan 0 planeA

ILE5014 Computer Graphics 10F 51
Inverses of Transformation MatricesInverses of Transformation Matrices
• Inverse geometrically
– T-1(tx, ty, tz) = T(-tx, -ty, -tz)
– S-1(sx, sy, sz) = S(1/sx, 1/sy, 1/sz)
– R-1 = R
• M = M1M2...Mn
2zyx1 )Rs,s,S(sRM
11
11n
1n MMMM
1
TT12
1 /1/1/1 )Rs,s,sS(RM zyx
SVD

ILE5014 Computer Graphics 10F 52
Coordinate TransformationsCoordinate Transformations
• So far, we think of transformation as moving points around.
• Transformation can be viewed as changing the coordinate system
Moving points
Moving coordinate
=

ILE5014 Computer Graphics 10F 53
Global vs. Local Coordinate SystemGlobal vs. Local Coordinate System
• Need to handle multiple coordinate systems
• A “canonical” coordinate system is usually designated as the frame-of-reference for all other coordinates
– Global coordinate
– World coordinate
– Frame of reference
• The others are called local coordinates

ILE5014 Computer Graphics 10F 54
Global vs. Local Coordinate SystemGlobal vs. Local Coordinate System
• x, y, u, v, o, e are all in global system
• P in global: (x(0), y(0)), P in local: (u(1), v(1))
• Convert local to global: vuep )1()1()0()0( ),( uuyx
11
0
0
100
10
01
1
)1(
)1(
)0(
)0(
v
u
e
e
y
x
y
x
vu
1100
10
01
1001
)0(
)0(
)1(
)1(
y
x
e
e
v
u
y
xT
T
v
u

ILE5014 Computer Graphics 10F 55
Transformation as Change in Coordinate SystemTransformation as Change in Coordinate System
• Useful in many situations
• Use most natural coordination system locally
• Tie things together in a global system

ILE5014 Computer Graphics 10F 56
ExampleExample
1
2
34
y
x

ILE5014 Computer Graphics 10F 57
is the transformation that takes a
point in coordinate system j and
converts it to a point in coordinate
system i
M ji
ExampleExample
p j)(
p i)(
pMpji
ji
)()(
pMpkj
kj
)()(
MMM kjki ji

ILE5014 Computer Graphics 10F 58
Example: Rotating CoordinateExample: Rotating Coordinate
X0
Y0
X1
Y1
Local coordinateGlobal coordinate
X1 Y1
Basis or Local Coordinate Frame
pMpji
ji
)()(

ILE5014 Computer Graphics 10F 59
Change of Coordinate SystemChange of Coordinate System
• Describe the old coordinate system in terms of the new one.
x’y’y
x
ILE5014 Computer Graphics 10F 60
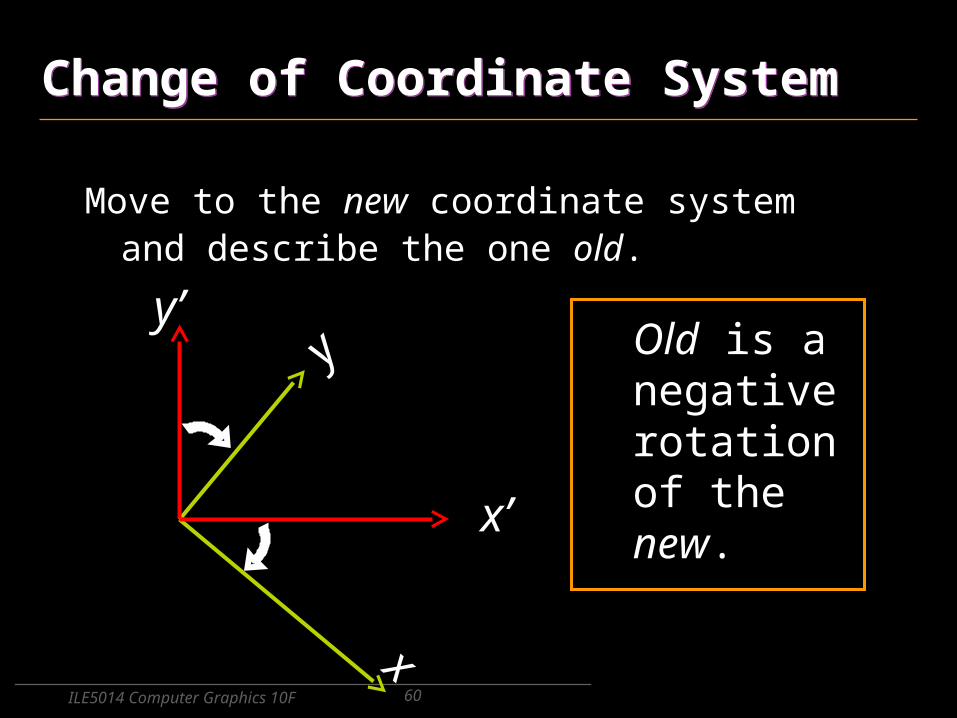
Change of Coordinate SystemChange of Coordinate System
Move to the new coordinate system and describe the one old.
x
y
x
y Old is a negative rotation of the new.x’
y’