uav-based remote sensing as a monitoring tool for smallholder cropping systems
TRANSCRIPT
UAV-based remote sensing as a monitoring tool for smallholder cropping systems
Adolfo Posadas2, Dieudonné Harahagazwe2, Arnold Bett1, Elijah Cheruiyot1,2
University of Nairobi
International Potato Center (CIP)
UAV Seminar, Geography DepartmentKenyatta University, 8 March 2016

2
Introduction
Background/history
Project objectives
Community of Practice / Training
Adolfo
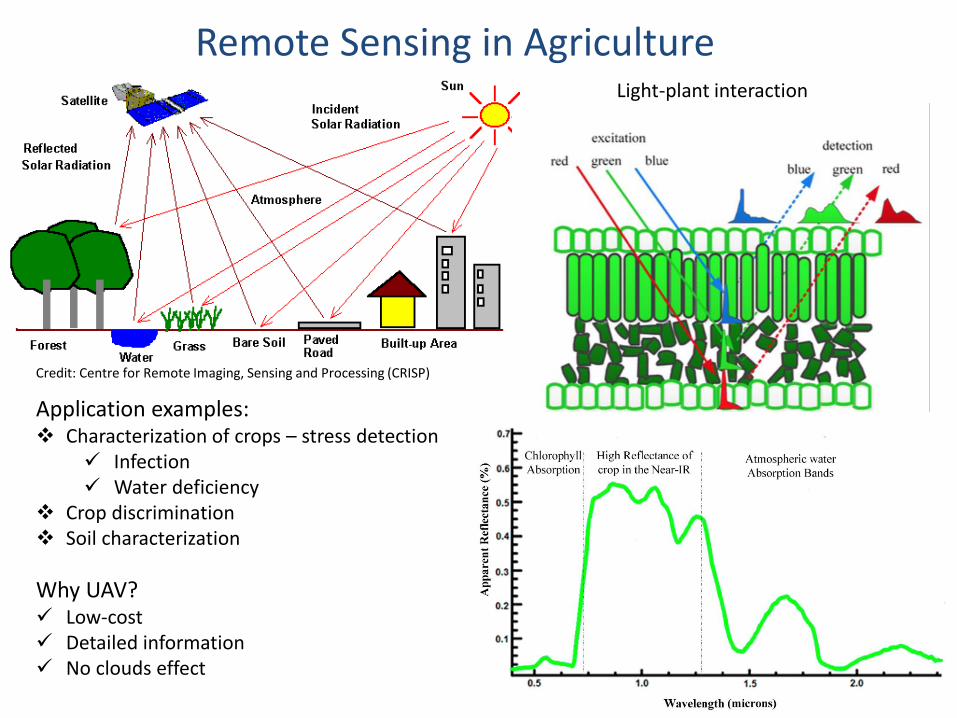
Light-plant interaction
Credit: Centre for Remote Imaging, Sensing and Processing (CRISP)
Application examples: Characterization of crops – stress detection
Infection Water deficiency
Crop discrimination Soil characterization
3
Remote Sensing in Agriculture
Why UAV? Low-cost Detailed information No clouds effect
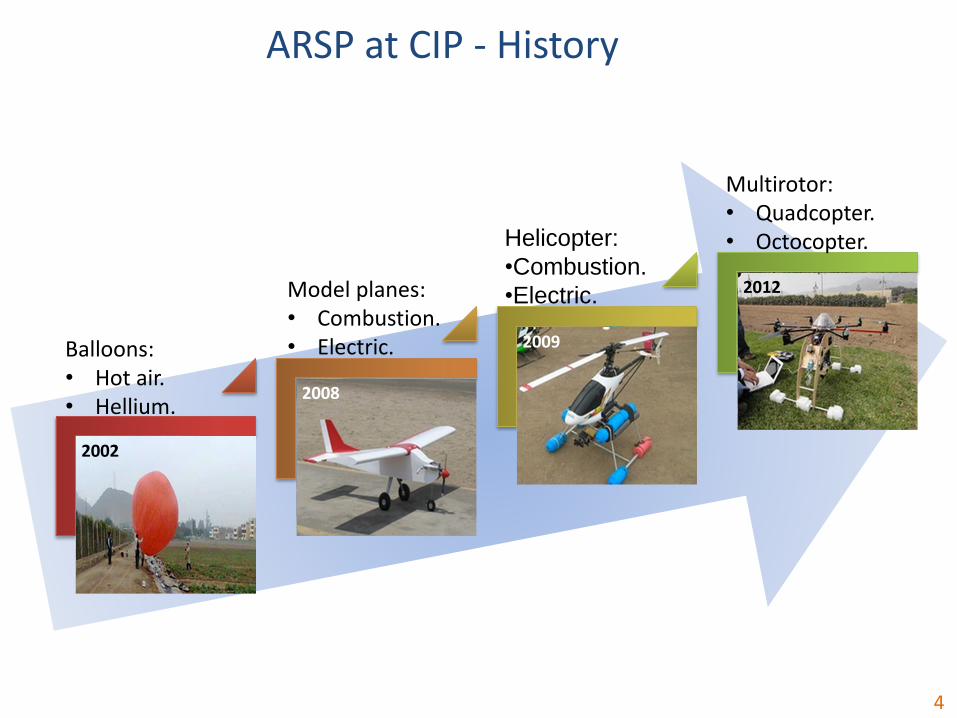
2002
Balloons:• Hot air.• Hellium.
2008
Model planes:• Combustion.• Electric. 2009
Helicopter:
•Combustion.
•Electric. 2012
Multirotor:• Quadcopter.• Octocopter.
ARSP at CIP - History
4
The aim of this “proof of concept” project is to develop and validate a low-cost UAV-basedremote sensing tool for crop area determination (ARSIS) using sweet potato as a pilot crop
Specific objectives include:
• Acquire and test digital commercial, multi- and hyper- spectral cameras, design,acquire, assemble, and test micro-sensors
• Implement methods to remove noise and enhance relevant information fromextremely high resolution imageries obtained by Drone
• Introduce Multi scaling algorithms, based on non-linear approaches, capable ofmeasuring at one scale while probabilistically making inference at other spatial scales
• An out scaling plan that describes a path forward for the validated UAV-ARSIS, as alogical next step of the “Proof of Concept” project.
5
Project Objectives
Key Highlights:
– Costs, accessibility, and user-friendliness
– Involving local institution at different stages is a must
– Stepwise – From simple to complex tools
– Complementarity with satellite imageries
– Multiple crops
– Yield assessment?
– Is it feasible to discriminate varieties?
6
32 Participants:
– National, Regional and International institutions
– 5 CGIAR Centers (CIP, ICRAF, CIAT, IITA and ILRI), and ICIPE
Community of PracticeInception Workshop – October 2014, Nairobi
Unmanned Aerial Vehicle (UAV) – platform
Sensors
Support system – power supply, communication, data storage
Arnold
7
Hardware
8
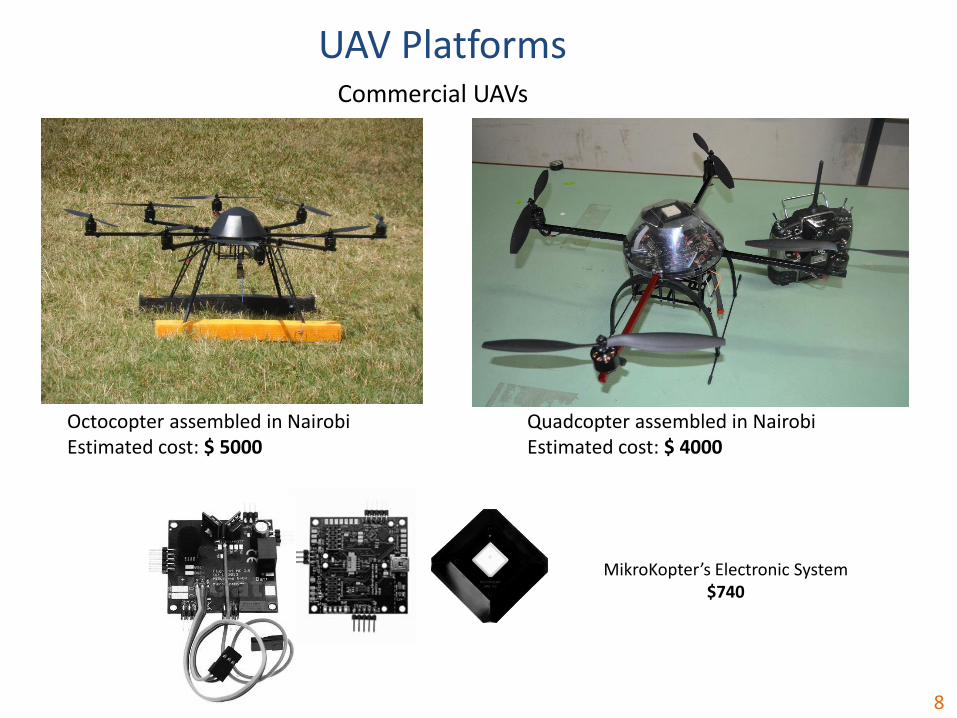
Commercial UAVs
UAV Platforms
Octocopter assembled in NairobiEstimated cost: $ 5000
Quadcopter assembled in NairobiEstimated cost: $ 4000
MikroKopter’s Electronic System$740

9
Ardupilot’s Electronic System$250
Quadcopter Open Source
UAV Platforms
Quadcopter Open Source designed and assembled locally based on ArdupilotEstimated cost: $ 500
10
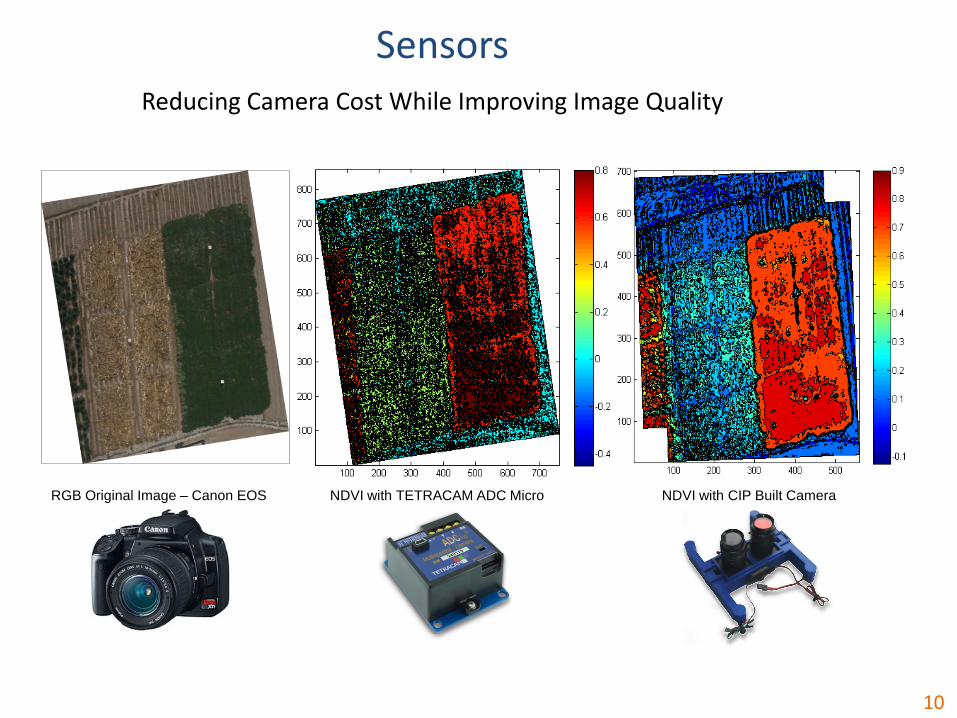
Reducing Camera Cost While Improving Image Quality
NDVI with TETRACAM ADC Micro NDVI with CIP Built CameraRGB Original Image – Canon EOS
Sensors

11
Active Sensors Under Construction
Sensors
Fluorescence sensor
Photochemical Reflectance Index (PRI) sensor under construction
12
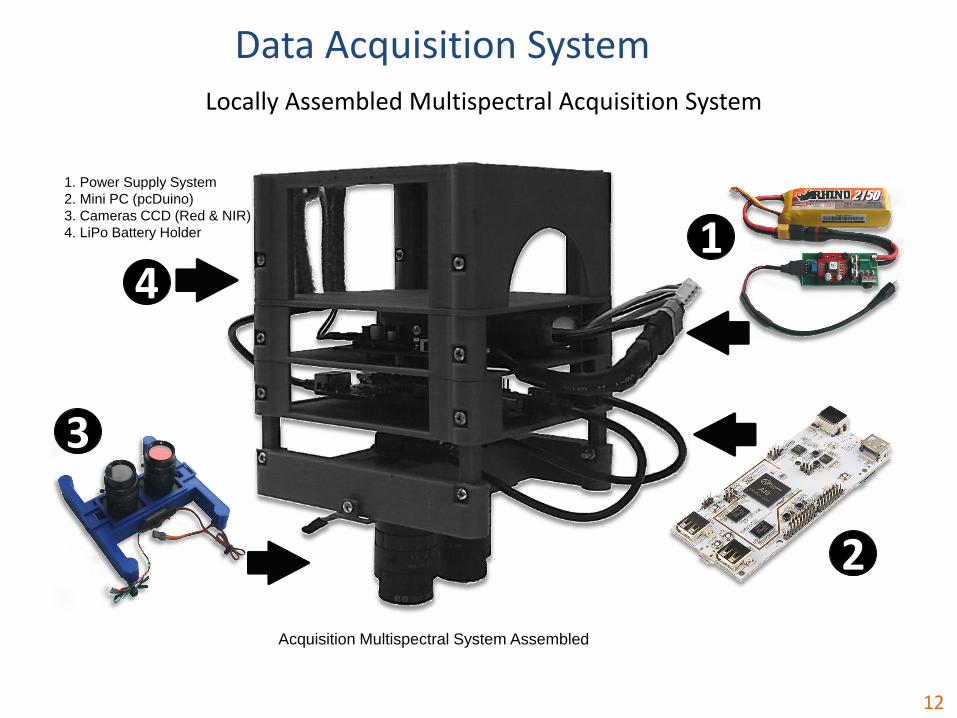
Locally Assembled Multispectral Acquisition System
Acquisition Multispectral System Assembled
1. Power Supply System
2. Mini PC (pcDuino)
3. Cameras CCD (Red & NIR)
4. LiPo Battery Holder 1
2
3
4
Data Acquisition System
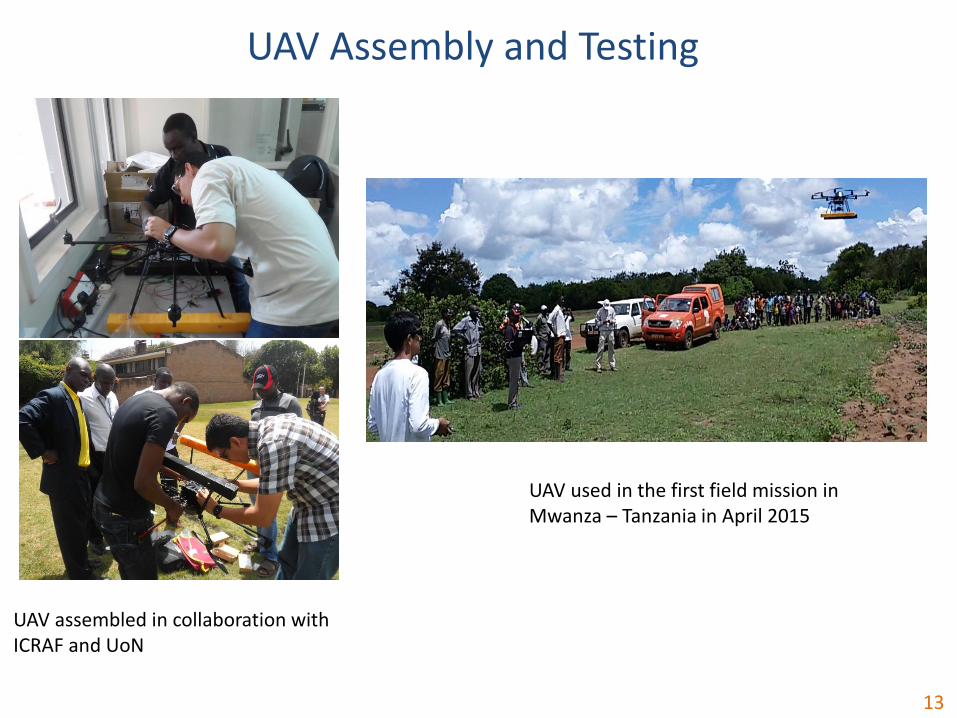
UAV assembled in collaboration with ICRAF and UoN
13
UAV Assembly and Testing
UAV used in the first field mission in Mwanza – Tanzania in April 2015

14
Capacity to Repair Broken Down UAVs - Demonstrated
UAV Repair and Maintenance
FixedCrashed Octocopter
Fixed3D-printed Quadcopter crashed
15
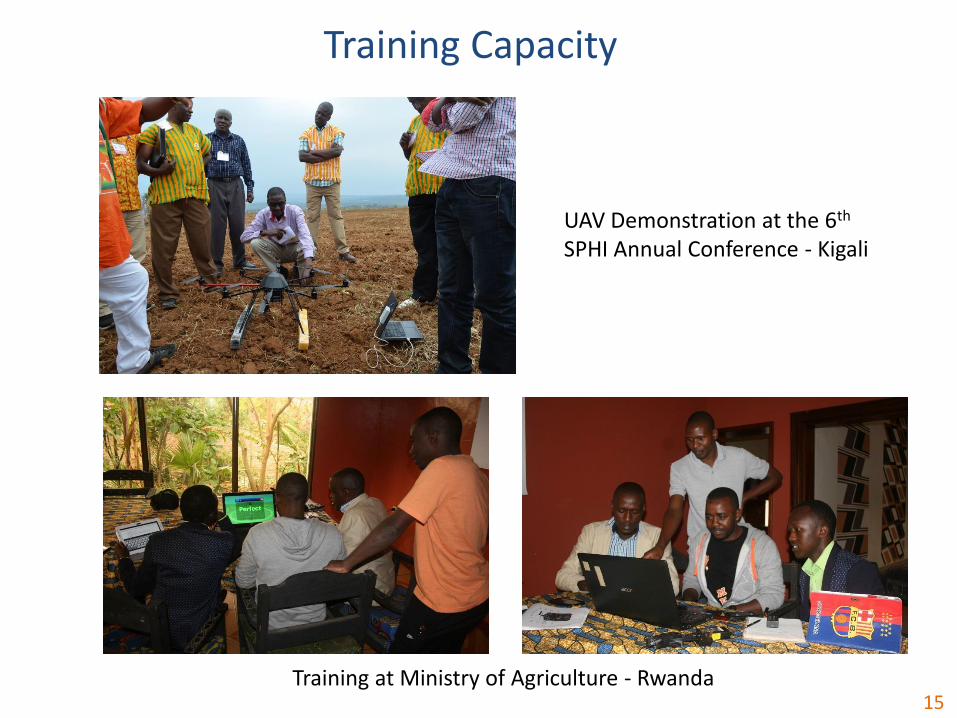
Training Capacity
UAV Demonstration at the 6th
SPHI Annual Conference - Kigali
Training at Ministry of Agriculture - Rwanda
Spectral data acquisition
Image mosaicking
Texture-aided supervised classification
Elijah
16
Software/Processing
17
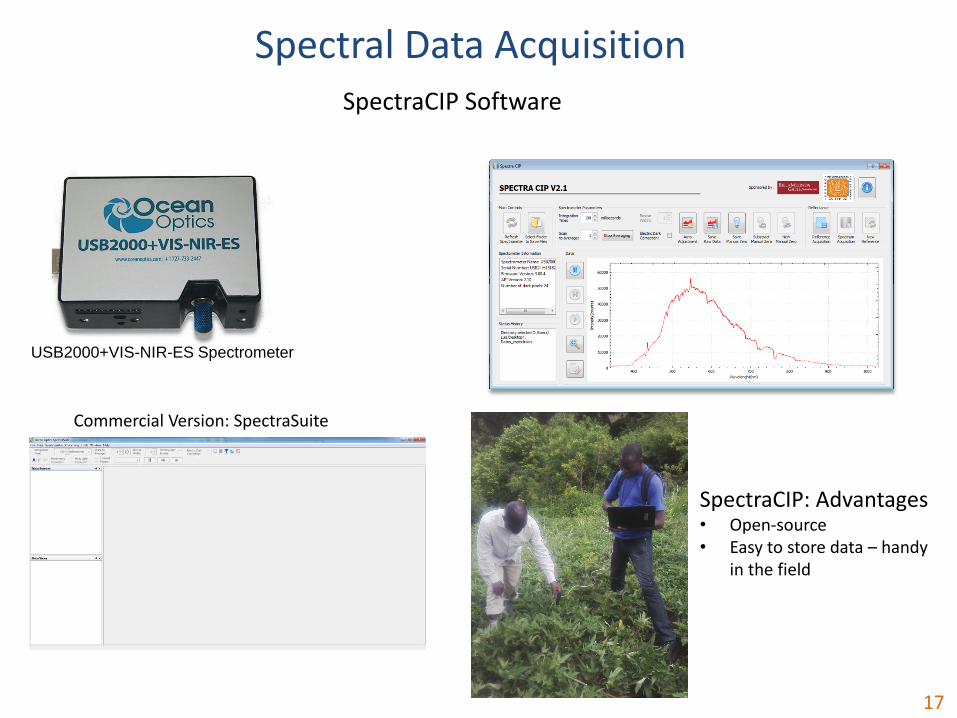
SpectraCIP Software
USB2000+VIS-NIR-ES Spectrometer
Spectral Data Acquisition
Commercial Version: SpectraSuite
SpectraCIP: Advantages• Open-source• Easy to store data – handy
in the field
18
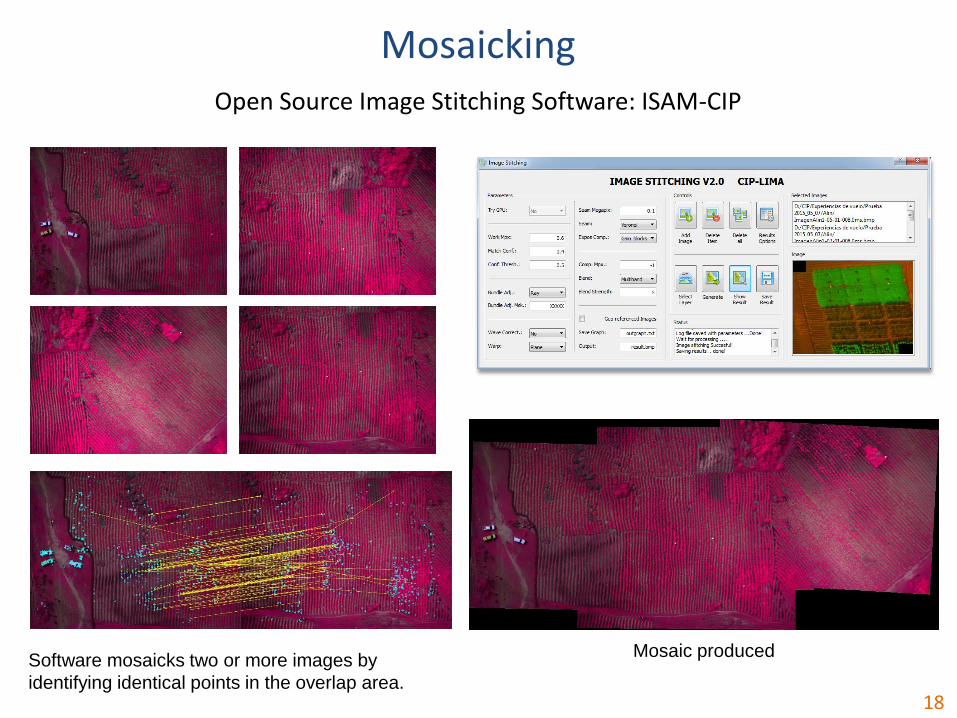
Open Source Image Stitching Software: ISAM-CIP
Mosaic producedSoftware mosaicks two or more images by
identifying identical points in the overlap area.
Mosaicking
19
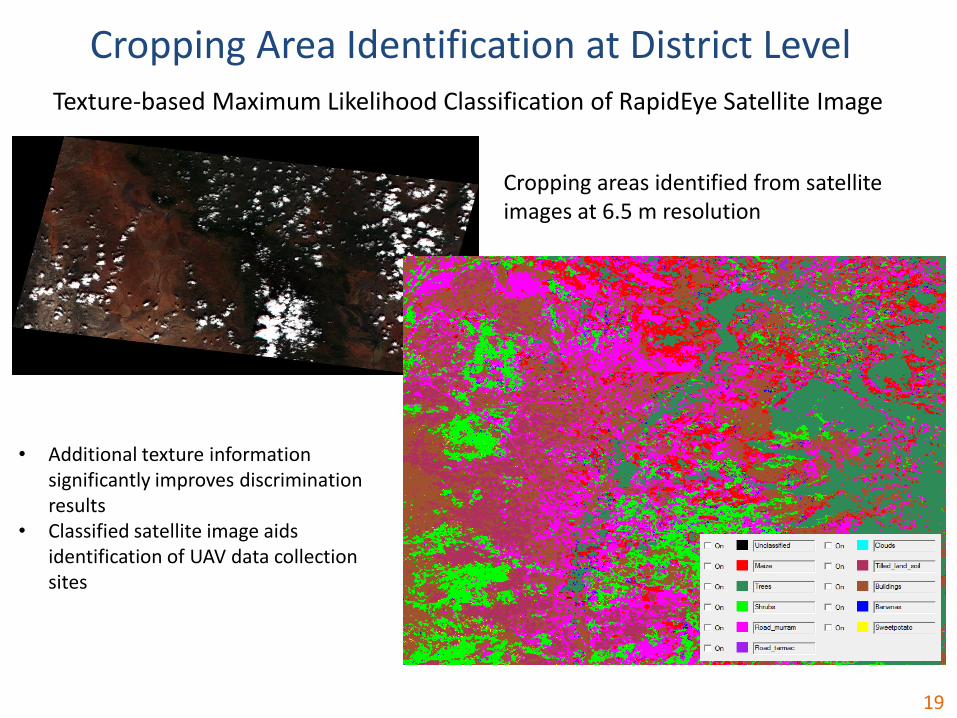
Texture-based Maximum Likelihood Classification of RapidEye Satellite Image
Cropping areas identified from satellite images at 6.5 m resolution
Cropping Area Identification at District Level
• Additional texture information significantly improves discrimination results
• Classified satellite image aids identification of UAV data collection sites
20
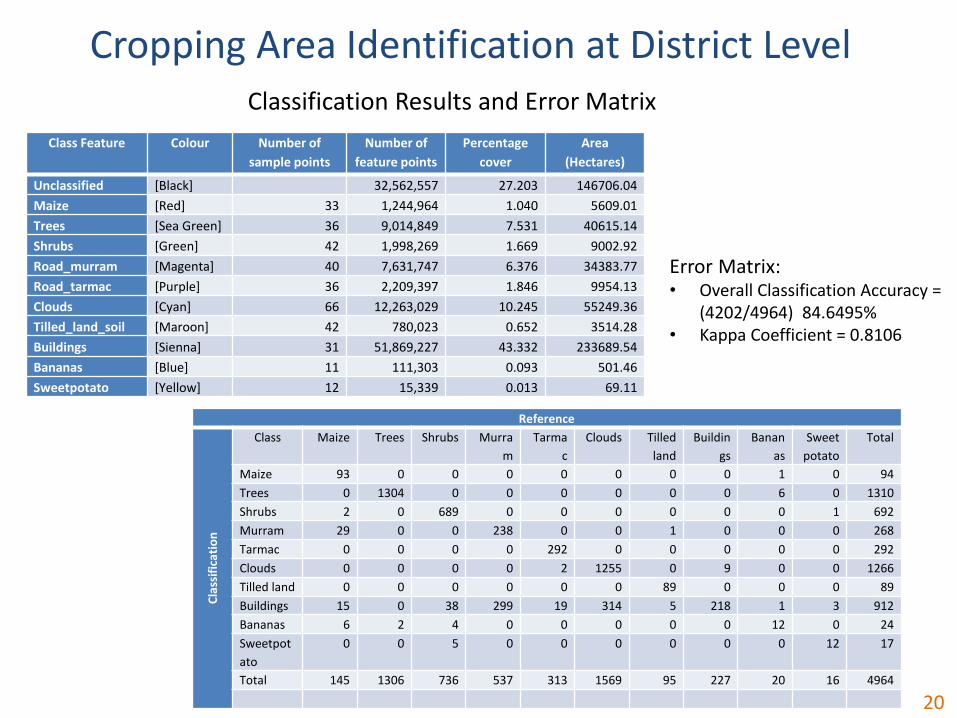
Classification Results and Error Matrix
Cropping Area Identification at District Level
Error Matrix:• Overall Classification Accuracy =
(4202/4964) 84.6495%• Kappa Coefficient = 0.8106
Class Feature Colour Number of
sample points
Number of
feature points
Percentage
cover
Area
(Hectares)
Unclassified [Black] 32,562,557 27.203 146706.04
Maize [Red] 33 1,244,964 1.040 5609.01
Trees [Sea Green] 36 9,014,849 7.531 40615.14
Shrubs [Green] 42 1,998,269 1.669 9002.92
Road_murram [Magenta] 40 7,631,747 6.376 34383.77
Road_tarmac [Purple] 36 2,209,397 1.846 9954.13
Clouds [Cyan] 66 12,263,029 10.245 55249.36
Tilled_land_soil [Maroon] 42 780,023 0.652 3514.28
Buildings [Sienna] 31 51,869,227 43.332 233689.54
Bananas [Blue] 11 111,303 0.093 501.46
Sweetpotato [Yellow] 12 15,339 0.013 69.11
Reference
Cla
ssif
icat
ion
Class Maize Trees Shrubs Murra
m
Tarma
c
Clouds Tilled
land
Buildin
gs
Banan
as
Sweet
potato
Total
Maize 93 0 0 0 0 0 0 0 1 0 94
Trees 0 1304 0 0 0 0 0 0 6 0 1310
Shrubs 2 0 689 0 0 0 0 0 0 1 692
Murram 29 0 0 238 0 0 1 0 0 0 268
Tarmac 0 0 0 0 292 0 0 0 0 0 292
Clouds 0 0 0 0 2 1255 0 9 0 0 1266
Tilled land 0 0 0 0 0 0 89 0 0 0 89
Buildings 15 0 38 299 19 314 5 218 1 3 912
Bananas 6 2 4 0 0 0 0 0 12 0 24
Sweetpot
ato
0 0 5 0 0 0 0 0 0 12 17
Total 145 1306 736 537 313 1569 95 227 20 16 4964

21
Texture-based Classification of UAV Image
Better classification results could be obtained with multispectral imageries, but this require special equipment and knowledge
Crops identified at farm level from images taken with <5 cm resolution using a regular digital camera
Crop Discrimination at Farm Level
Multifractal analysis
Spatial scaling
Adolfo
22
Non-linear Processing
23
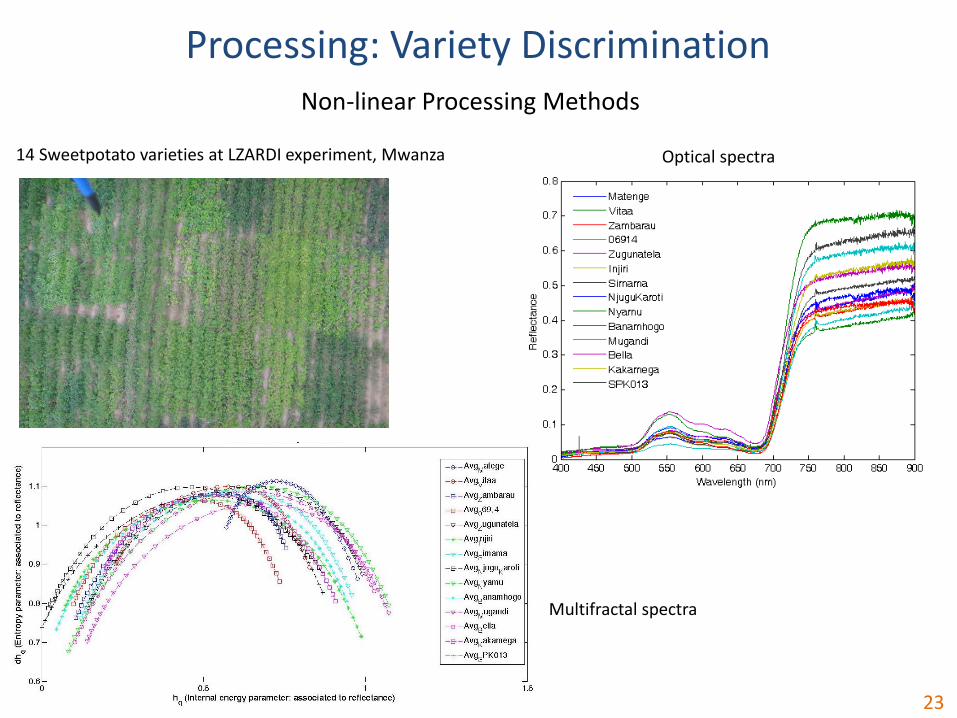
Non-linear Processing Methods
14 Sweetpotato varieties at LZARDI experiment, Mwanza Optical spectra
Multifractal spectra
Processing: Variety Discrimination
24
Way Forward
• Develop a UAV Regional Hub in Nairobi:
– Training on UAV hardware and software development
– Training on UAV applications
• Engage in advocacy to improve an enabling environment for the use of UAVs for development in the region
• Etc.

Videos:
• AgroTV–16 – Spanish;
• ARSIS Video – English;
Blog Posts:
• Invasion of the Potato Drones – Lima;
• Community of Practice – SSA;
• UAV Assembling – SSA;
• Crop Discrimination;
• Airborne Agriculture
Photos:
• Testing the Unmanned Aerial Vehicle – Flickr;
Join UAV Community on Online Platforms:
• UAV4Ag on DGroups;
• @UAV4Ag on Twitter.
25
Learn More!

Thank you!
Contacts:Roberto Quiroz, PhD
International Potato Center (CIP)
Q/A
Contributing authors:Adolfo Posadas
Arnold BettElijah Cheruiyot
Dieudonné HarahagazweHildo Loayza
Susan PalaciosMario Balcázar
Luis SilvaRoberto Quiroz