under vehicle surveillance system - ijcta · method under vehicle surveillance is not ... receiver...
TRANSCRIPT

Abstract— At parking zones of public places, government offices,
malls, etc. cars were checked by the guard for security purpose
with the help of metal rod along with mirror pan. Using this
method under vehicle surveillance is not possible properly.
Another way to carry out this inspection by using three to four
cameras fixed under the hard steel and when the vehicle will pass
over this arrangement at a particular limited speed, so that
underneath of the vehicle can be inspected. But this will be costly.
So, came up with this project. This project consists of wireless
robotic vehicle wireless camera mounted on it whose video output
is viewed on the computer. The wireless robotic vehicle on which
wireless camera is mounted can be controlled from the computer
using graphical user interface application. This robotic vehicle
can be moved under the vehicle and thus the inspection of the
underside of that vehicle can be taken place.
This project can be implemented for security purposes in
government offices, parking lots, etc.
Index Terms— Under Vehicle Surveillance system (UVSS),
Graphical User Interface (GUI), etc
I. INTRODUCTION
ith national security raised to a major problem in our
lives, the research on under vehicle inspection has
drawn more attention than before. Underside of the
vehicles was checked by guard using mirror pan. But proper
surveillance is not possible with this method. Another way to
carry our this inspection by using three to four cameras fixed
under the hard steel and when the vehicle will pass over this
arrangement at a particular limited speed, so that underneath
of the vehicle can be inspected. But this will be costly. So here
we come with our project. This Consists of a robotic vehicle,
on which a camera is mounted, which can be operated from
remote location. So this vehicle would go under the vehicle of
which inspection to be done and the underside of that vehicle can be viewed on the screen of the computer. As robotic
vehicle move underneath the vehicle it will allow us to see
area which is hard to view. Thus the inspection can be done
properly.
This project can be decomposed into three main parts as
building a robotic vehicle, developing a GUI on the computer
screen from which this vehicle can be operated and the
communication between the vehicle and the computer. Here,
both the serial and wireless communication are used. Serial
communication is used for the transmission data between GUI
and RF transmitter whereas wireless communication is used
between robotic vehicle and RF transmitter.
A robotic vehicle can be build on chassis on which a camera
can be mounted which can also be moved in certain directions
like the vehicle to get the better view.
This project will help to improve the security at the places
such as public places, shopping malls, government offices, border crossings, airports etc.
The remainder of this paper is organized as follows. Section
II gives the idea about related previous work. Section III gives
the system description in which introduction to the major
requirements of this project are specified. Section IV gives the
design steps for developing the system while working of the
project is given in section V. In section VI we draw some
conclusion.
II. LITERATURE REVIEW
Criminals and terrorists have been known to carry
explosives and drugs and other form of goods in the
undercarriage of the vehicle. The word „under-carriage‟ means
the underside of the vehicle. The term vehicle includes at least
automobiles, vans, small trucks, large trucks, etc. Inspection
stations have been set up in a variety of locations to prevent
passage of forbidden items hidden in the undercarriage of the
vehicles. For example international and state borders, airports,
military and security check points and even many commercial
structures are protected by system designed to inspect vehicle
undercarriages.
Perhaps the most common inspection method used to
perform undercarriage inspection involves a human inspector
manipulating a mirror attached to the end of a stick. The inspector manually positions a mirror underneath a vehicle in
such a way that he or she can view portions of vehicle‟s
underside in the mirror‟s reflection. This allows the inspector
vehicle‟s underside without having to kneel down or crawl
underneath the vehicle.
The so called mirror and stick approach has a number of
fairly obvious shortcomings. Most obviously this approach
puts the inspector in physical danger by placing him or her
near potentially dangerous harmful substances e.g. explosives,
caustic chemicals biological weapons, etc. Furthermore
scanning the entire underside of the vehicle using mirror on
stick takes a considerable amount of time which may lead to
serious congestion of traffic at certain places of high traffic
areas. More ever human inspection fails to notice important
details when they are fatigued or in rush, thereby limiting the
reliability of their inspection.
A number of more sophisticated approaches have been
proposed in an attempt to provide safer, more efficient and more reliable ways of inspecting vehicle undercarriages. This
approach includes stationary under vehicle inspection devices
and unmanned robotic vehicle. Conventional stationary under
vehicle inspection devices are characterized by the use of
Under Vehicle Surveillance System
Sudarshan B. Divekar
M.Tech.(Electronics)
Department of Electrical Engg.
Veermata Jijabai Technological Institute, Matunga, Mumbai [email protected]
W
Sudarshan B Divekar, Int.J.Computer Technology & Applications,Vol 5 (2),756-758
IJCTA | March-April 2014 Available [email protected]
756
ISSN:2229-6093
fixed cameras that image some portion of vehicle‟s
undercarriage as the vehicle is driven over the device. A
typical stationary under vehicle inspection device comprises a
camera strip that captures a number of images of the vehicle‟s
underside and then sends images to human inspector for
analysis.
III. SYSTEM DESCRIPTION
The system in major have following requirements.
1) Microcontroller p89v51rd2
2) Wireless camera
3) Wireless interface
4) GUI control
1) Microcontroller p89v51rd2:
The present paper aim to illustrate a notable application using
a microcontroller 8051
2) Wireless camera:
Mini wireless security set for quick and easy amateur
surveillance, with an included long range wireless receiver and
a super small 1/3 inch CMOS wireless camera with both audio
and video capturing. The mini cam features good low light
gathering 3LUX as well as a wide angle 4mm lens and the
ability to be powered either from a wall socket or from a
standard 9V battery with the included adapters, and the
receiver can be used not only with the included camera, but
using the channel tuning, with most wireless cameras
transmitting on the 1.2GHz spectrum.
3) Graphical User Interface:
The GUI is used to control the Robotic Vehicle for navigation
i.e. left, right, forward and backward. This will be built using MATLAB. After that, we will click on START Button due to
which the other buttons of navigation become active and the
label of START button changes to STOP.
4) Wireless Interface:
The STT-433 is ideal for remote control applications
where low cost and longer range is required. The transmitter
operates from a 1.5 -12V supply, making it ideal for battery-
powered applications. The transmitter employs a SAW-
stabilized oscillator, ensuring accurate frequency control for
best range performance. Output power and harmonic
emissions are easy to control, making FCC and ETSI
compliance easy. The manufacturing-friendly SIP style
package and low-cost make the STT-433 suitable for high
volume applications
IV. DESIGN STEPS
Following are the steps to be followed in order to
accomplish our project.
1. Building of robotic vehicle 2. Mounting of camera transmitter and RF receiver
on the robotic vehicle
3. Developing GUI from where the robot and camera has to be operated
4. Attaching RF transmitter at the computer end via
microcontroller from which communication between robotic vehicle and GUI will take place smoothly.
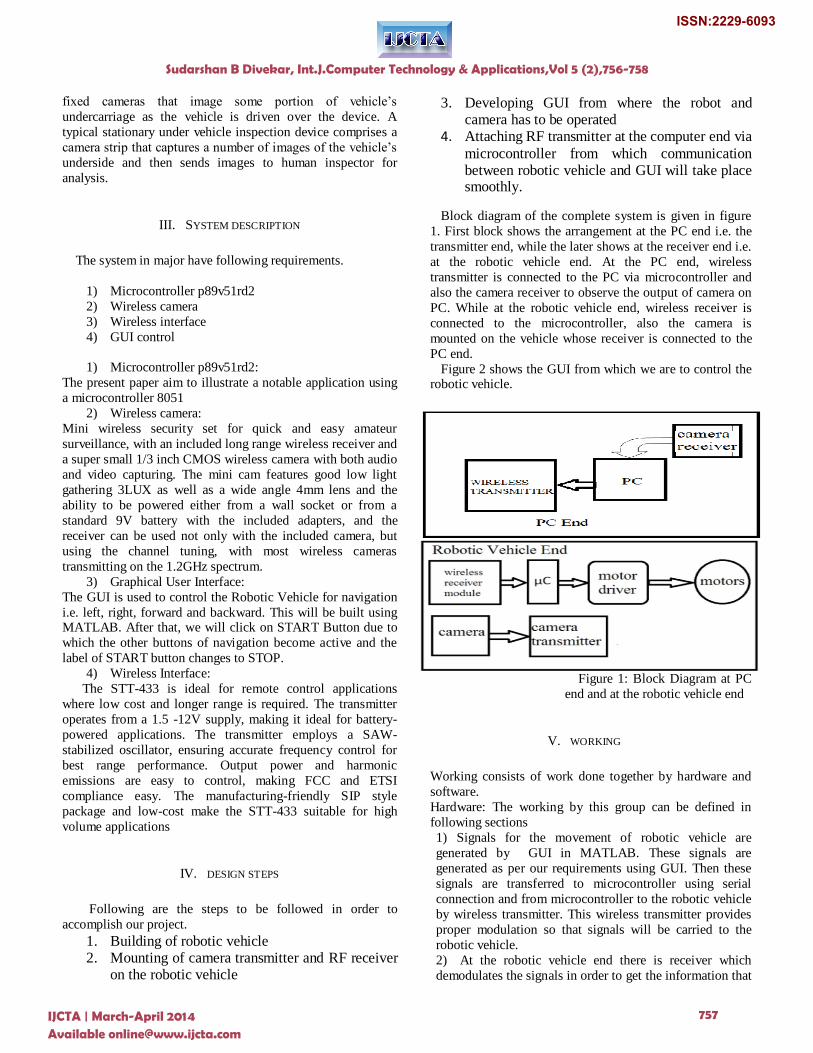
Block diagram of the complete system is given in figure
1. First block shows the arrangement at the PC end i.e. the
transmitter end, while the later shows at the receiver end i.e.
at the robotic vehicle end. At the PC end, wireless
transmitter is connected to the PC via microcontroller and
also the camera receiver to observe the output of camera on
PC. While at the robotic vehicle end, wireless receiver is
connected to the microcontroller, also the camera is
mounted on the vehicle whose receiver is connected to the
PC end.
Figure 2 shows the GUI from which we are to control the robotic vehicle.
Figure 1: Block Diagram at PC
end and at the robotic vehicle end
V. WORKING
Working consists of work done together by hardware and
software.
Hardware: The working by this group can be defined in
following sections
1) Signals for the movement of robotic vehicle are
generated by GUI in MATLAB. These signals are
generated as per our requirements using GUI. Then these
signals are transferred to microcontroller using serial
connection and from microcontroller to the robotic vehicle
by wireless transmitter. This wireless transmitter provides
proper modulation so that signals will be carried to the
robotic vehicle.
2) At the robotic vehicle end there is receiver which
demodulates the signals in order to get the information that
Sudarshan B Divekar, Int.J.Computer Technology & Applications,Vol 5 (2),756-758
IJCTA | March-April 2014 Available [email protected]
757
ISSN:2229-6093

has been sent. These signals act as source for the robotic
vehicle to move
Software: Here we have to use two different tools. First one
is for the robotic vehicle movement and the other for GUI.
1) For the robotic vehicle movement, we have to program
microcontroller. We‟ll use Keil to compile our program
and this will also give hex code to burn into
microcontroller. The hex code can be burnt to the
microcontroller using flashmagic.
2) For GUI we can use Visual Basic as well as MATLAB,
but here we‟ll use MATLAB to create GUI. GUI may
look like as in figure 2.
So finally we can take our robotic vehicle to inspect
the undercarriage of the vehicle using GUI and hence
under vehicle can be taken place.
figure 2: GUI using MATLAB
VI. CONCLUSION
This paper shows one of the notable application of
microcontroller 8051, which explains about how can we inspect the undercarriage of a vehicle. This can give us low
cost under vehicle surveillance system, which can be used in
the parking lots of malls, government offices, etc.
References
[1] “Muhammad Ali Mazidi (2008), The 8051 Microcontroller And
Embedded Systems Using Assembly And C,Pearson,India”
[2] “B. Hunt, R. Lipsman, J. Rosenberg, K. Coombes, J. Osborn, G. Stuck 2001,A guide to MATLAB,Cambridge,United Kingdom”
[3] “Scott Y. Harmon,1987,VOL. RA-3,page no. 266, The Ground
Surveillance Robot (GSR): An Autonomous Vehicle Designed to Transit Unknown Terrain”
[4] “Thomas Bräunl(2006), Embedded Robotics Mobile Robot Design And Applications With Embedded Systems, Springer, Germany”
[5] “Fadnavis Shubham,Research Journal of Engineering Sciences ,A Design of GUI Based Wireless Robotic Car,2012,vol1-2,26-31,”
Sudarshan B Divekar, Int.J.Computer Technology & Applications,Vol 5 (2),756-758
IJCTA | March-April 2014 Available [email protected]
758
ISSN:2229-6093