unifying agent systemsresearch.gold.ac.uk/8794/1/unifying agent systems.pdfplying it to evaluate...
TRANSCRIPT

Luck, Michael and d’Inverno, Mark. 2003. Unifying agent systems. Annals of Mathematics andArtificial Intelligence, 37(1-2), pp. 131-167. ISSN 1012-2443 [Article]
http://research.gold.ac.uk/8794/
The version presented here may differ from the published, performed or presented work. Pleasego to the persistent GRO record above for more information.
If you believe that any material held in the repository infringes copyright law, please contactthe Repository Team at Goldsmiths, University of London via the following email address:[email protected].
The item will be removed from the repository while any claim is being investigated. Formore information, please contact the GRO team: [email protected]

Unifying Agent Systems
Mark d’Inverno MichaelLuckCavendishSchoolof ComputerScience Deptof ElectronicsandComputerScienceUniversityof Westminster Universityof SouthamptonLondon,W1M 8JS,UK Southampton,SO171BJ,[email protected] [email protected]
Abstract
Whilst therehasbeenan explosionof interestin multi-agentsystems,therearestill manyproblemsthatmayhave a potentiallydeleteriousimpacton theprogressof thearea.Theseprob-lemshavearisenprimarily throughthelackof acommonstructureandlanguagefor understandingmulti-agentsystems,andwith which to organiseandpursueresearchin this area.In responsetothis, previouswork hasbeenconcernedwith developinga computationalformal framework foragency andautonomywhich, we argue,providesanenvironmentin which to develop,evaluate,andcomparesystemsandtheoriesof multi-agentsystems.In thispaperwegosomeway towardsjustifying theseclaimsby reviewing the framework andshowing what we canachieve within itby developingmodelsof agentdimensions,categorisingkey inter-agentrelationshipsandby ap-plying it to evaluateexisting multi-agentsystemsin a coherentcomputationalmodel.We outlinethebenefitsof specifyingeachof thesystemswithin theframework andconsiderhow it allowsusto unify differentsystemsandapproachesin general.
1 Intr oduction
In recentyears,therehasbeenanexplosionof interestin agentsandmulti-agentsystems.Thishasnotonly beenin artificial intelligencebut in otherareasof computersciencesuchasinformationretrievaland software engineering. Indeed,thereis now a plethoraof different labelsfor agentsincludingautonomousagents[32], software agents[22], intelligent agents[59], interfaceagents[37], virtualagents [1], informationagents [35], mobileagents [57], andso on. The diverserangeof applica-tionsfor whichagentsarebeingtoutedincludeoperatingsystemsinterfaces[21], processingsatelliteimagingdata[54], electricitydistribution management[31], air-traffic control [34] businessprocessmanagement[29], electroniccommerce[26] andcomputergames[25], to namea few. Moreover,significantcommercialandindustrialresearchanddevelopmenteffortshavebeenunderway for sometime [9, 11,44, 45], andaresetto grow further.
However, thefield of agentsandmulti-agentsystemsis still relatively young,andtherearemanyproblemsthatmayhave a potentiallydeleteriousimpacton theprogressof thearea.Theseproblemshave arisenprimarily throughthelack of a commonstructureandlanguagefor understandingmulti-agentsystems,andwith whichto organiseandpursueresearchin multi-agentsystems.It is, therefore,importantto ensurethatany suchstructureswe generateareaccessibleif therearegoingto have anysignificantimpacton the way researchprogresses[38]. In particular, we needto be able to relatedifferenttheoriesandapproacheswithin MAS sothatdifferentsystemsandmodelscanbeintegrated.This canbeachieved in two stages:first we needto beableto isolatethepotentialinconsistenciesin
1

definitionsof fundamentaltermsfrequentlyusedwhendiscussingmulti-agentsystems,andsecondweneedto provide anenvironmentin which differentsystemsandtheoriescanbedeveloped,evaluatedandcompared.
1.1 Formal Frameworks
Wehavepreviouslyconsideredtherequirementsfor thestructuresor frameworksthatarenecessarytoprovidearigorousapproachto any discipline[19], andin particularto agentsandmulti-agentsystems[40]. Suchframeworksshouldpreciselyandunambiguouslyprovide meaningsfor commonconceptsandtermsbut in an accessiblemannersinceonly thenwill a commonconceptualframework havea chanceof emerging. (If thereis a generallyheld understandingof the salientfeaturesandissuesinvolved in the relevant classof modelsthenwe canassertthe existenceof a commonconceptualframework). Anotherimportantaspect,andkey to thework presentedin this paperis that it enablesmodelsandsystemsto beexplicitly presented,comparedandevaluated.Not only mustit provide adescriptionof thecommonabstractionsfoundwithin thatclassof models,but alsoit mustprovide ameansof furtherrefinementto specifyparticularmodelsandsystems.
Multi-agentsystemsareinherentlycomplicated,and,consequently, reasoningaboutthebehaviourof suchsystemsbecomesdifficult. The ability to formalisemulti-agentsystems,to do so in suchawaythatallows automatedreasoningaboutagents’behaviour and,additionally, to dosoin away thatis alsoaccessible, is thereforecritically important.
In what follows, we seekto show that the formal framework we have developedsatisfiestheserequirementsandprovidesjust sucha baseasis necessaryfor a rigorousanddisciplinedapproachtomulti-agentsystemsresearch.Ouraimhereis notto provideadetailedpresentationof our framework,whichhasbeenpresentedextensively elsewhere,but insteadto show how it maybeappliedto differentsystems,andhow they maybeaccommodatedwithin a singleoverarchingframework. Similarly, wearenot concernedin this paperwith the detailedspecificationof agentbehaviour, thoughwe haveaddressedthis previously in [16, 18], norwith reasoningaboutagentbehaviour, thoughagainrelatedwork hasaddressedthis, for examplein thecontext of Agentis[15, 56].
1.2 Overview
In this paper, we review andbuild on previous work that hasdevelopeda formal agentframeworkandextendit to constructseveralagentmodels.Thesemodelsrangefrom genericabstractmodelstoveryspecificsystemmodelsthathavebeendescribedandimplementedelsewhere.In thenext sectionwe review the framework we have developedandin Section4 andshow how it canbe extendedtodescribecertaintypesof agents,describingautonomousagents,planningagents,memoryagentsandsocial agents. Next, the paperpresentsthreecasestudiesin applying the framework. Thesecasestudieshave beenchosenasexemplarsspecificallybecausethey lie at oppositeendsof the multi-agentsystemspectrum;one is a relatively new mostly theoreticalmodel, while the other two arewell-known, fully developedandimplementedsystems.Finally, thepaperassessesthesignificanceofthis research,andconsidersfurtherwork.
2 Formal Specification
Oneseriousproblemwith many formal modelsof multi-agentsystemsis that they arevery rarelyapplicableto building real systems.Indeedthe gapbetweenformal theoreticalmodelson the onehandandimplementedsystemson theotheris now a widely acknowledgedissue[13, 30] andwhilst
2

therehave beenseveralnotableefforts to addressthis (e.g. [46, 58]), it is still thecasethatmostnewformalmodelsdo notevenoutlinetheir role in systemdesignandimplementation.
Thereis a large numberof formal techniquesand languagesavailable to specify propertiesofsoftwaresystems[14] includingstate-basedlanguagessuchasVDM [33], Z [53] andB [36], process-basedlanguagessuchasCCS[41] andCSP[28], temporallogics[20], modallogics[10], andState-charts[55]. However, in bringingtogethertheneedfor formalmodelsononehandandcomputationalmodelsthat relateto softwaredevelopmenton the other, we adoptthe Z specificationlanguage.Zis the mostwidely usedof formal methodsfrom softwareengineering,andoffers arguablythe bestchanceof theagentmodelsdevelopedachieving a significantdegreeof adoptionin thebroadercom-munity.
TheZ languageis usedboth in industryandacademia,asa strongandelegantmeansof formalspecification,and is supportedby a large array of books(e.g. [2, 27]), articles (e.g. [3, 4]) anddevelopmenttools. Its usein industryis both a reflectionof its accessibility(the languageis basedon simplenotionsfrom first orderlogic andsettheory)andits expressiveness,allowing a consistent,unifiedandstructuredaccountof acomputersystemsandits associatedoperations.Furthermore,Z isgainingincreasingacceptanceasa tool within theartificial intelligencecommunity(e.g.[24, 39, 42])andis consequentlyappropriatein termsof standardsanddisseminationcapabilities.
2.1 Z LanguageSyntax
Thekey syntacticelementof Z is theschema,which allows specificationsto bestructuredinto man-ageablemodularcomponents.Theschemabelow hasaverysimilarsemanticsto theCartesianproductof naturalnumbersbut without any notionof order. In addition,andascanbeseenin theexample,the schemaenablesany declaredvariablesto be constrained.In this casethe schemadeclarestwovariablesthatarebothnaturalnumbers,andconstrainsthemso that thevariable
�������is lessthanor
equalto thevariable��������
.
����� �������������������� ������������� ��������
Modularity is facilitatedin Z by allowing schemasto beincludedwithin otherschemas.We canselecta statevariable, ! � � , of a schema,
���"#��$ �, by writing
���"#��$ �&% ! � � . For example,it shouldbeclearthat
�'��� � % �������refersto thevariable
�����(�in theschema
����� �.
Now, operationsin a state-basedspecificationlanguagearedefinedin termsof changes to thestate. Specifically, an operationrelatesvariablesof thestateafter theoperation(denotedby dashedvariables)to thevalueof thevariablesbeforetheoperation(denotedby undashedvariables).Opera-tionsmayalsohave inputs(denotedby variableswith questionmarks),outputs(exclamationmarks)anda precondition.In the ) ���*� � �,+&-/.01����� schemabelow, thereis anoperationwith aninput variable,����243
; if����243
liesbetweenthevariables�����(�
and��������
, thenthevalueof�������
is replacedwith thevalueof
����243. Theoriginalvalueof
�����(�is theoutputas
�.0 �5. The 6 ����� � symbol,is anabbreviation
for�'��� �87 �'��� �19
and,assuch,includesin this schemaall thevariablesandpredicatesof thestateof�'��� �beforeandaftertheoperation.
3

) ���*� � �,+&-/.01������:��243;���6 �'��� ��.< �5�������������=����243�:��243>�?�������� �������@9BAC����243�������� 9 AD�������� �.< �5EAF�����(�
A key typein thespecificationcontainedin this paperis therelationtype,expressinga mappingbetweentwo sets:asourcesetanda targetset.Thetypeof a relationwith sourceG andtarget H is asimply a setof orderedpairs, IKJML�N&O . More formally, we have thefollowing definitionfor therelationtype.
GQP H A;ASR ITGVU=H8OBy wayof example,considerthefollowing relationbetweennaturalnumbers.� J � $4W�.X������. � � � ��Y��� P �� J � $4W�.X������. � � � ��ZAC[ IT\,L^]#O�L�IT_,L�`aO�L�ITb,L�\,O^c
Thedomainof a relation(dom) is thesetof relatedsourceelements,while therange(ran) is thesetof targetelements.In theexampleabove we have thefollowing.
dom� J � $4W�.0���^��. � � � ��ZAD[ \,L�_,L�bac
ran� J � $4W�.0���^��. � � � ��ZAD[ `,L�\,L^]#c
In thefollowing exampleweshow how asetof elementscanbedefinedusingsetcomprehension.[ J �d�fe Jhgji>kl`4mnJMc AD[po L�`,L^]EL�b,L�q,L�r o L�r�`,c
The“bullet” canalsobeusedin predicatessuchastheonebelow, which statesthat thesquareofany naturalnumberlessthan10 is lessthan100.
s �t�d�fea� g r o k � m � gur o�o
2.2 Z Extensions
In theschemagivenbelow,$ � W�����v
takesa functionanda sequenceandappliesthefunctionto eachelementof thesequenceand
$ � W&�����takesafunctionandasetandappliesthefunctionto eachelement
of theset.w GxLBHzy$ � W�����v{� ITG |} H{O~|} seqG |} seq H$ � W������n� ITG |} H8Oj|} R G |} R Hs ����v��;�
seqG��nJ �;��R Gx����� ��� G |} HCk$ � W&����v ��� ������v��zAD[d�Z���Ce,�Z� r %�%1� ����v�� k{I � L*�(� � I ����v���� O^O^c 7$ � W&����� ��� � J �zAC[ J � G e J � J � k��(� � JMc
4

We have found it usefulin this specificationto beableto assertthatanelementis optional. Forexample,in thespecificationgivenin this paper, whethera socialagenthasamodelof itself or not isoptional.Thefollowing definitionsprovide for a new type, �#�1�^� �E������� , for any existing type, � .
�#����� �E���d� w G�y A;Au[ J �>��R G e � J � � r1cMost othersyntacticconstructsin this paperarefairly standardbut morecompletetreatmentsof
Z canbefoundelsewhere[53].
3 The Agent Framework
Therearefour typesuponwhich all our notionsin the SMART (StructuredandModularAgentsandRelationshipTypes)agentframework arebased.The definitionswithin this paperwill be built upusingonly thesetypes;they aredeclaredbelow.
w�� �*��� �*� � �K� L � p� � �� L�) � . L�� d� � ! � � � �� yAn entity is somethingthatcomprisesa setof attributes,a setof actions,a setof goalsanda set
of motivations.Theschemabelow hasa declarative partcontainingfour variables.First,� �*��� ��� � �K�(�
is the setof featuresof the entity. Thesefeaturesare the only characteristicsof the entity that aremanifest.They neednot beperceivedby any particularentity, but mustbepotentiallyperceivableinanomniscientsense.Second,
� W �d��� . � � � �(�is thesetof actionsof theentity, andis sometimesreferred
to asthecompetenceof theentity. Next,+a � .��
and${d� � ! � � � ��E� arethesetsof goalsandmotivations
of theentity respectively. Goalsaresimply statesof affairs to beachieved in theenvironment,in thetraditionalartificial intelligencesense,while motivationsarehigher-level non-derivative componentscharacterisingthenatureof theagent,but arerelatedto goals.Motivationsare,however, qualitativelydifferentfrom goalsin thatthey arenotdescribablestatesof affairsin theenvironment.For example,themotivationgreeddoesnot specifyastateof affairsto beachieved,nor is it describablein termsoftheenvironment,but it may(if othermotivationspermit)give riseto thegenerationof a goalto rob abank. Thedistinctionbetweenthemotivationof greedandthegoalof robbinga bankis clear, withthe formerproviding a reasonto do the latter, andthe latterspecifyingwhatmustbedone. Finally,thepredicatepartstatesthattheentity musthave anon-emptysetof attributes.
� �&� � � N� �*��� �*� � �K�(�;�dR � �*��� �*� � �K� � W �d��� . � � � ���>��R � �� � ��+a � .��>��R ) � .$��� � ! � � � ��B�>��R � d� � ! � � � ��� �*��� �*� � �K�(���AC[ c
An objectis any entity thathascapabilities(aswell asattributes).Theschemadefininganobjectis thatof anentity with thefurtherproviso thattheobjecthasanon-emptysetof capabilities.
� �T� ����� �&� � � N � W �d��� . � � � �����AD[ c
5

In our framework an agent is an object that is servingsomepurpose. That is, an agentis aninstantiationof anobjecttogetherwith anassociatedgoalor setof goals.Theschemafor anagentissimply thatof anobjectbut with thefurtherrestrictionthatthesetof goalsof anagentis notempty.
� +a���&�� �T� ����+a � .����AD[ c
Wedefinean� � ! � ����B$����&� to beasetof attributes.
� � ! � �^��B$����&��A>AjR � �*��� ��� � �K�Next wedefineaninteraction.An interaction is simplywhathappenswhenactionsareperformed
in anenvironment. Theeffectsof an interactionon theenvironmentaredeterminedby applyingthe�� ����� � �&�K��� � p� � ��function in theaxiomdefinitionbelow to thecurrentenvironmentandtheactions
taken. This axiom definition is a global variableandis consequentlyalways in scope. We requireonly one function to describeall interactions,sincean actionwill result in the samechangeto anenvironmentwhethertakenby anobjector any kind of agent.
�* z��p� � ���K��� � �� � ��Z� � � ! � ����&$����&� } R � p� � �� |} � � ! � �^��B$������
3.1 Agent Perceptionand Agent Action
Perceptioncannow beintroduced.An agentin anenvironmentmayhave a setof perceptsavailable,which arethe possibleattributesthat an agentcould perceive, subjectto its capabilitiesandcurrentstate. We refer to theseas the possibleperceptsof an agent. However, due to limited resources,an agentwill not normallybe ableto perceive all thoseattributespossible,andwill baseits actionson a subset,which we call theactualperceptsof anagent. Indeed,someagentswill not be abletoperceive at all. In this case,the setof possibleperceptswill be emptyandconsequentlythe setofactualperceptswill alsobeempty.
To distinguishbetweenrepresentationsof mentalmodelsandrepresentationsof theactualenvi-ronment,a type, ¡ � ��2 , is definedto be the perceptionof an environmentby an agent. This hasanequivalenttype to thatof
� � ! � ����B$����&� , but now physicalandmentalcomponentsof thesametypecanbedistinguished.
¡ � ��2jA;AjR/¢ � �*��� �*� � �K�It is alsoimportantto notethatit is only meaningfulto considerperceptualabilitiesin thecontext
of goals.Thuswhenconsideringobjectswithout goals,perceptualabilitiesarenot relevant. Objectsresponddirectly to theirenvironmentsandmakenouseof perceptsevenif they areavailable.Wesaythatperceptualcapabilitiesareinert in thecontext of objects.
In the schemafor agentperception,� +,���&� � ���^��@W:�£�
, we add further detail to the definition ofagents,andsoincludetheschema
� +a���&�. An agenthasasetof perceiving actions,
WB���^�� � ! � �a+ � �� � ��E� ,whichareasubsetof thecapabilitiesof anagent.Thefunction,
� ��WE����(� � ! � , determinestheattributesthatarepotentiallyavailableto anagentthroughits perceptioncapabilities.Whenapplied,its argu-mentsare the currentenvironment,which containsinformation including the agent’s location andorientation(thusconstrainingwhatcanbeperceived) andtheagent’s capabilities.Thesecondpred-icate line statesthat thosecapabilitieswill be preciselythe set of perceptualcapabilities. Finally,
6

the function,2 � .£. WE���^�� � ! � , describesthoseattributesthatareactuallyperceivedby anagentandwill
alwaysbeappliedto its goals.
� +a���&� � ����(�@W��£�� +a���&�WB���^�� � ! � �a+ � �� � ��E�>�dR � p� � �� � ��WE����(� � ! �¤� � � ! � �^��B$����&� } R � p� � �� |} � � ! � �^��B$����&�2 � .£. WE����(� � ! �¤��R ) � . } � � ! � ����&$����&� } ¡ � ��2WB���^�� � ! � �a+ � �� � ��E�¤¥D � W ����� . � � � ���s ��� ! � � � ! � �^��B$����&� � � �;��R � �� � �� k� �>�
domI � ��WE���^�� � ! �¤��� !BO§¦ � �zA¨WE����(� � ! � �a+ � p� � ��E�dom2 � .£. WB���^�� � ! �>AD[�+� � .©� c
Directly correspondingto thegoalor goalsof anagent,is anaction-selectionfunction,dependenton thegoals,currentenvironmentandthe actualperceptions.This is specifiedin
� +,���&� � ��below,
with thefirstpredicateensuringthatthefunctionreturnsasetof actionswithin theagent’scompetence.Notealsothat if thereareno perceptions,thentheaction-selectionfunctionis dependentonly on theenvironment.
� +a���&� � ��� +a���&�� +a����� � �� � ��E�>��R ) � . } ¡ � ��2 } � � ! � �^��B$����&� } R � �� � ��s +��;��R ) � . �4! � ¡ � ��2 � ��� ! � � � ! � �^��B$������ k
I � +,���&� � p� � ��E��+�� ! ��� !BO ¥D � W ����� . � � � ���dom� +a���&� � �� � ��E�;Au[�+� � .©� c
3.2 Agent State
The stateof an agentdescribesan agentcurrently situatedin someenvironmentand is definedasfollows. This includestwo variables,
WE1���KWE���^��ªW��£�, describingthoseperceptspossiblein thecurrent
environment,and� �� � � . WE���^��ªW��£� , a subsetof thesewhich are the current(actual)perceptsof the
agent.Thesearecalculatedusingthe � ��WE����(� � ! � and
2 � .£. WE����(� � ! � functions.
� +a���&��«&� � �K���� ! � �^��B$����&�n� � � ! � �^��B$����&�� +a���&� � ����(�@W��£�� +a���&� � ��WE1���KWE���^��ªW��£�8� ¡ � ��2� �� � � . WE���^��ªW��£�¤� ¡ � ��22 � .£.< d���R � �� � ��� �� � � . WE���^��ªW��£�8¥FWE1���KWE���^��ªW��£�WB���^�� � ! � �a+ � �� � ��E��AC[ cj¦ W#1���TWE����(�@W��£�>AD[ cWE1���KWE���^��ªW��£�;A¬ � ��WB���^�� � ! �8��� ! � ����&$����&��WE���^�� � ! � �a+ � �� � ��E�� �� � � . WE���^��ªW��£�lAC2 � .£. WE����(� � ! �4+� � .©��W#1���TWE����(�@W��£�2 � .£.< dA � +,���&� � �� � ��E�'+� � .�� � �� � � . WE����(�@W��£�8��� ! � ����B$����&�
7

Lastly we specifyhow anagentinteractswith its environment.As a resultof an interaction,theenvironmentandthe
� +a���&��«&� � �K�change.
� +a���&� � � !�® �&�K��� � p�6 � +,���&��«&� � �K���� ! � �^��B$����&�ª9&A¬�* z��p� � �&�K��� � �� � ��Z��� ! � ����B$����&��2 � .£.0 dWE1���KWE���^��ªW��£��9:A¯ � ��WE����(� � ! �8��� ! � �^��B$������@9dWE���^�� � ! � �,+ � p� � ��B�� �� � � . WE���^��ªW��£��9:AC2 � .°. WE����(� � ! �'+a � .���W#1���KWE���^��ªW��£��92 � .£.< dd9&A � +a���&� � p� � ��B�'+a � .�� � �� � � . WE���^��ªW��£��9±��� ! � �^��B$������@9
3.3 Tropistic Agents
SMART specifiesa setof genericarchitectures.The types,functionsandschemasit containscanbeappliedto othersystemsandconcepts. In order to illustrate its usein this way, and to show howthemodelof interactionis sufficiently generalto capturemosttypesof agents,tropistic agents[23]are reformulatedasan exampleof an agent. It is oneof a setof coreagentarchitecturesusedbyGeneserethandNilssonto demonstratesomekey issuesof intelligent agentdesign. Theactivity oftropistic agents,aswith reflexive agents,is determinedentirely by the stateof the environmentinwhich they aresituated. First, the original descriptionof tropistic agentsis summarisedand thenreformulatedusingelementsof SMART.
According to Geneserethand Nilsson, the set of environmentalstatesis denotedby«
. Sinceagentperceptionsarelimited in general,it cannotbeassumedthatanarbitrarystateis distinguishablefrom every otherstate.Perceptionsthuspartition
«in sucha way thatenvironmentsfrom different
partitionscanbe distinguishedwhilst environmentsfrom the samepartition cannot. The partitionsaredefinedby thesensoryfunction,
�����, which mapsenvironmentscontainedin
«to environments
containedin � , thesetof all observed environments.Theeffectory function, �
, which determineshow environmentschangewhenanagentperformsanaction,takenfrom thesetof theagentactions,�
, mapstheagent’sactionandthecurrentenvironmenttoanew environment.Finally, action-selectionfor a tropisticagent,
� �� � ��, is determinedby perceptionsandmapselementsof � to elementsof
�.
Tropisticagentsarethusdefinedby thefollowing tuple.
I « La��L � L �����8�E« } ��L d�� � U « } « L � �� � ��Z� � } � O3.3.1 Reformulating Perception
TheSMART framework canbeappliedto reformulatetropisticagentsby first definingtypes:equatingtheset
«to the SMART type,
� � ! � ����B$����&� ; theset � (asit refersto agentperceptions),to thetype¡ � ��2 ; andtheset,
�, to thetype
� p� � ��. Thefollowing typedefinitionscanthenbewritten.
«xA;A � � ! � ����B$����&��7 � A;A ¡ � ��2j7 � A;A � p� � ��
Accordingto SMART, tropisticagentsarenotautonomous.Thustheagent-level of conceptualisa-tion is themostsuitablelevel, andthesearethemodelschosen.The functionsdefiningarchitectureat this level are
� ��WE����(� � ! � , 2 � .£. WE���^�� � ! � and� +a���&� � p� � ��B�
, definingthe possiblepercepts,actualperceptsandperformedactions,respectively. Theeffectof actionsonenvironmentsis independentofthe level chosenin theagenthierarchyanddefinedby
�� z���� � �&�K��� � �� � ��. Recallthat thesefunctions
have thefollowing typesignatures.
8

� ��WE����(� � ! �8� � � ! � �^��B$����&� } R � p� � �� |} ¡ � ��22 � .£. WE����(� � ! �8��R ) � . } ¡ � ��2 } ¡ � ��2� +a����� � �� � ��E�8��R ) � . } ¡ � ��2 } � � ! � ����&$����&� } R � �� � ���* z��p� � ���K��� � �� � ���� � � ! � ����&$����&� } R � �� � �� } � � ! � ����B$����&�
Thesefunctionsincludeexplicit referenceto agentgoals,which arenot representedin themodelof tropistic agentssincethey are implicitly fixed in the hard-codedfunctions. In what follows, thevalueof thesegoalsis taken to be
+��andaccordinglysetall goalparametersof SMART functionsto
thisvalue.The goalsof a tropistic agentdo not constrainthe selectionof its perceptionsfrom thosethat
are available, and2 � .°. WE����(� � ! � is definedas the identity function on observed environments. In
SMART, the perceiving actionsare usedat every perceiving stepso that the secondargumentof � ��WE���^�� � ! � is alwaysappliedto the perceiving actions(WB���^�� � ! � �a+ � �� � ��E� ) of the agentsasspec-
ified in the� +,���&� � ���^��@W:� � ��
schema.Accordingly, tropisticperceptionis reformulatedin thesecondpredicatebelow. Thereis animplicit assumptionthat tropisticagentsarecapableperceivers;percep-tionsarealwaysa subsetof theactualenvironment. This assumptionis formalisedin the lastof thethreepredicatesbelow thattogetherdefinetropisticperception.
2 � .£. WE����(� � � ! ��+��zAD[ ! � ¡ � ��2 kI�!&L�!&O^cs �;�E« k �����>��AC2 � .°. WE����(� � ! �4+�� I � ��WE����(� � ! �8��WE����(� � ! � �a+ � �� � ��E� Os � L�! �E« k 2 � .£. WE����(� � ! �4+�� I � ��WB���^�� � ! ���WB���^�� � ! � �a+ � �� � ��E� O ¥D�
Thesetof partitionsin«
canbecalculatedusingsetcomprehension.
W � �(� � � � ��E�>A;Au[,� L�! � � � ! � ����B$����&��e ! AD�����>� k �����4²³[ !Bc�c3.3.2 Reformulating Action
Thedifferencebetweenthe SMART framework andtropisticagenteffectory functionsis simply thattheformerallows for a setof actionsto beperformedratherthanasingleaction.
s �;� � � ! � �^��B$����&� � � � � �� � �� k d I � L � O A¬�* z��p� � �&�K��� � �� � ��Z��[ � cTheactionselectedby a tropisticagentis dependentsolelyon its perceptions.In SMART, theac-
tionsperformedareadditionallydependentongoalsandtheenvironment.Theenvironmentcanaffecttheperformanceof selectedactionsif, for example,anagenthasincorrector incompleteperceptionsof it. By contrastit is assumedthat a tropistic agentcorrectlyperceives its staticenvironmentandperformsactionsthatareequivalentto thoseselected.Theseassumptionsmeanthat theenvironmentdoesnot affect the performanceof actionsoncethey have beenselected.In orderto specifythis inSMART, the
� � ! � ����B$����&� parameterof� +,���&� � �� � ��E�
is fixedto theemptyset,and� �� � ��
is definedusing
� +,���&� � p� � ��E�asfollows.
s ! � �Sk � �� � �� ! A � +,���&� � p� � ��E��+�� ! [ cReformulatingtropisticagentsusingSMART highlightsseveral issuesof note.First, SMART pro-
videsamoreintuitiveconceptualisationof anagentasanobjectwith apurpose.Goalsarehard-codedinto tropistic agentactionsandperceptionfunctions;they areneitherascribedto theagentsnor arethereany explicit mechanismsby whichagentgoalsdirectbehaviour. Second,explicitly incorporatingagentgoalsin SMART providesa moresophisticateddesignenvironment.It incorporatesthepremise
9

thatagentgoalschangeover time andthat theselectionof actionsandperceptionsmustbeadaptedaccordingly. Clearly, it is inefficient to have to re-write the functionsdefiningactionandperceptionselectionevery time new goalsareadopted.Third, featuresof SMART aremoregenerallyapplicablethanthosedescribedfor tropistic agents,andit canthereforebe usedto explicitly formaliseany as-sumptions(implicit or otherwise)regardingthe tropistic agent,its environment,andthe interactionbetweenthem.
In thissectionwe have constructeda formal specificationthatprovidesuswith ahierarchywhereall agentsareobjects,andall objectsareentities,with the distinctionbetweeneachcategory madeprecise. However, the agentsthat have beendefinedarenot in themselves especiallyusefulor in-teresting.Consequently, we mustconsiderhow we canrefinethis framework to developdefinitionsfor other, moreinterestingandmorevariedkindsof agents.Thenext sectiondescribesandspecifiesfour typesof agents,eachdescribingsomesubsetof theagentclass.Theseareautonomousagents,memoryagents,planningagentsandsocialagents.Eachdefinitionwill arisethrougha refinementoftheideasandschemaspresentedabove.
4 Classesof Agents
4.1 AutonomousAgents
Ourdefinitionof agentsentailsthenotionthatanentity is servingsomepurposeor, equivalently, thattheentity canbeascribedsomegoal. However, we have not asyet consideredhow goalsarisein thefirst place.In our view, goalsarederivative componentsthatareconstructedin responseto theneedseitherof theagentitself, or of someotheragent.Goalscanbeadoptedandtransferred,but if goalsarederivative aswe claim, thentheremustbesomeentitiesin theworld cangenerateor derive thesegoals.We definethenon-derivative componentsfrom which goalsarederived asmotivations;goalsaregeneratedsolelyin responseto motivations.It is this quality thatdefinesautonomy;anagentthathasanon-emptysetof motivations(from whichgoalsmaybecreated)is anautonomousagent.
An autonomousagent is anagenttogetherwith anassociatedsetof motivations.
� � �T����$� � � � +a���&�� +a���&�$��� � ! � � � ��B���AD[ c
An autonomousagentis definedasanagentwith motivationsandsomepotentialmeansof evalu-atingbehaviour in termsof theenvironmentandthesemotivations. In otherwords,thebehaviour oftheagentis determinedby both externalandinternalfactors.This is qualitatively differentfrom anagentwith goalsbecausemotivationsarenon-derivative andgovernedby internalinaccessiblerules,while goalsarederivative andrelatedirectly to motivations.
Autonomousagentsalsoperceive, but motivations,aswell asgoals,filter relevantaspectsof theenvironment.In theschemabelow, thefunction
� � �T�2 � .£. WE���^�� � ! � is thenamorecomplex versionof anagent’s
2 � .£. WB���^�� � ! � , but they arerelated— if wechooseto interpretthebehaviour of theagentsolelyin termsof its agenthood(andthereforeits goals)thenthe
2 � .£. W��^���� � ! � representationis appropriate,andif we wish to interpretits behaviour in termsof its autonomy(andthereforeits motivationsaswell asits goals)thenthefunction
� � �T�2 � .°. WE����(� � ! � will beappropriate.Nevertheless,thatwhichanautonomousagentis capableof perceiving atany timeis independent
of its goalsandmotivationsandwe just import thedefinitionof � ��WE���^�� � ! � from
� +a����� � ���^��ªW��£�.
10
� � �T����$� � � � +a���&� � ����(�@W��£�� � �T����$� � � � +a���&�� +a���&� � ����(�@W��£�� � �T�2 � .£. WB���^�� � ! ���R � �� � ! � � � �� } R ) � . } � � ! � ����B$����&� } ¡ � ��2dom� � �T�2 � .£. WE���^�� � ! �>Au[d$��� � ! � � � ��E� c
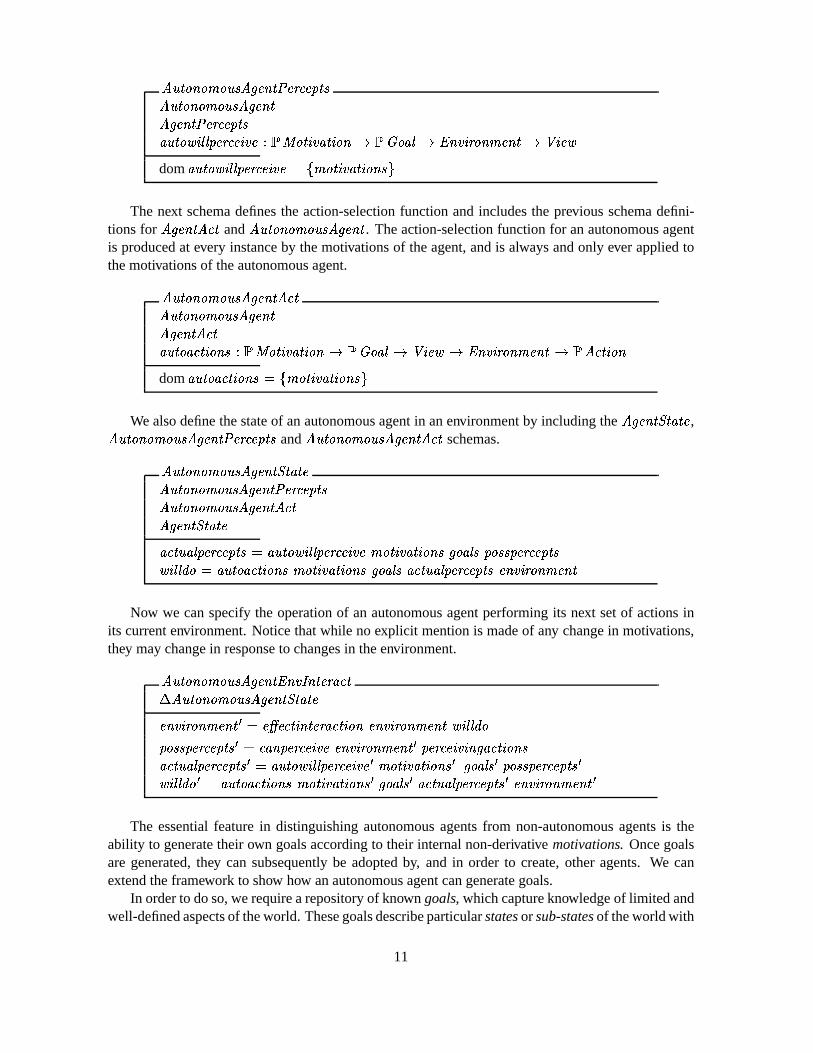
The next schemadefinesthe action-selectionfunction andincludesthe previous schemadefini-tionsfor
� +a���&� � ��and� � �T����${ � � � +,���&� . Theaction-selectionfunctionfor anautonomousagent
is producedat every instanceby themotivationsof theagent,andis alwaysandonly ever appliedtothemotivationsof theautonomousagent.
� � �T����$� � � � +a���&� � p�� � �T����$� � � � +a���&�� +a���&� � ��� � �T � �� � ��E�8��R � �� � ! � � � �� } R ) � . } ¡ � ��2 } � � ! � �^��B$����&� } R � �� � ��dom� � �T � �� � ��E�;AD[d$��� � ! � � � ��E� c
Wealsodefinethestateof anautonomousagentin anenvironmentby includingthe� +,���&��«&� � �K�
,� � �T����${ � � � +,���&� � ���^��ªW��£� and� � �T����$� � � � +a���&� � p� schemas.
� � �T����$� � � � +a���&��«&� � �K�� � �T����$� � � � +a���&� � ����(�@W��£�� � �T����$� � � � +a���&� � p�� +a���&��«&� � �K�� �� � � . WE���^��ªW��£�lA � � �T�2 � .£. WB���^�� � ! �>$��� � ! � � � ��E��+a � .���WE1���KWE���^��ªW��£�2 � .£.< dA � � �T � �� � ��E�l$��� � ! � � � ��E�4+� � .©� � p� � � . WE����(�@W��£�{��� ! � �^��B$������
Now we canspecifythe operationof an autonomousagentperformingits next setof actionsinits currentenvironment.Noticethatwhile no explicit mentionis madeof any changein motivations,they maychangein responseto changesin theenvironment.
� � �T����$� � � � +a���&� � � !�® �&�K��� � p�6 � � �T����$� � � � +a���&��«&� � �K���� ! � �^��B$����&�ª9&A¬�* z��p� � �&�K��� � �� � ��Z��� ! � ����B$����&��2 � .£.0 dWE1���KWE���^��ªW��£� 9 A¯ � ��WE����(� � ! �8��� ! � �^��B$������ 9 WE���^�� � ! � �,+ � p� � ��B�� �� � � . WE���^��ªW��£��9:A � � �T�2 � .£. WE����(� � ! �p9�${d� � ! � � � ��E��9¤+� � .©��9�W#1���KWE���^��ªW��£��92 � .£.< d 9 A � � �T � p� � ��B�;${d� � ! � � � ��E� 9 +a � .�� 9M� p� � � . WE����(�@W��£� 9 ��� ! � ����B$����&� 9
The essentialfeaturein distinguishingautonomousagentsfrom non-autonomousagentsis theability to generatetheir own goalsaccordingto their internalnon-derivative motivations. Oncegoalsaregenerated,they cansubsequentlybe adoptedby, and in order to create,otheragents. We canextendtheframework to show how anautonomousagentcangenerategoals.
In orderto doso,werequirearepositoryof known goals, whichcaptureknowledgeof limited andwell-definedaspectsof theworld. Thesegoalsdescribeparticularstatesorsub-statesof theworldwith
11

eachautonomousagenthaving its own suchrepository. An agenttries to find a way to mitigatemo-tivations,eitherby selectinganactionto achieve anexisting goal,by reactively performinganactionin direct responseto motivations,or by retrieving a goal from a repositoryof known goals.Thefirsttwo of thesealternativeswereaddressedby the
� � �T � �� � ��E� function in the� � �T����$� � � � +,���&� � ��
schemaseenearlier, while thelastis consideredbriefly below.In order to retrieve goalsto mitigate motivations,an autonomousagentmust have someway
of assessingthe effectsof competingor alternative goals. Clearly, the goalsthat make the greatestpositive contribution to themotivationsof theagentshouldbe selected.To do this, an autonomousagentmustmonitor its motivationsfor goalgeneration,andretrieve appropriatesetsof goalsfrom arepositoryof availableknown goals. We candefinea function that takesa particularconfigurationof motivationsanda setof existing goalsandreturnsa numericvaluerepresentingthemotivationaleffectof satisfyingthosegoals.Thenall thatis necessaryfor goalgenerationis to find thesetof goalsin the goalbasethat hasa greatermotivationaleffect thanany othersetof goals,andto updatethecurrentgoalsof theagentareupdatedto includethenew goals.
4.2 Memory Agents
Theagentsconsideredaboveareverysimpleandrelysolelyontheenvironment,goalsandmotivations(if available)to determineaction.Wehavenotyetspecifiedthewayin whichsomeagentsmaybeableto take into accountprior experience(exceptthroughany changesthatarisein goalsandmotivations).Agentswhocannottakepastexperienceinto accountwill beextremelylimited asaresult.By addingfurther detail to our existing definitionswe now provide a descriptionof agentswith the ability toaccessan internalstoreof attributesor memorythat canrecord,for example,prior experienceandotherrelevant information.Wecall anagentwith suchaninternalstoreamemoryagent.
A memoryagentdoesnot necessarilyrecordjust thoseattributesthat arecurrentlyavailable intheexternalenvironment,but mayalsostoresomeotherattributesregardingmoregenerallearnedoracquiredinformation.
� ��$��� N � +,���&�� +a���&�$���${�� N ��R � �*��� ��� � �K�$���${�� N �AD[ c
Thus a memoryagentdiffers from the previous agentsby having available, in addition to theexternalenvironment,an internalstoreof attributes,bothof which contribute to forming theagent’scurrentview of theworld. Clearly, a memoryagentwill requirecertainperceiving actionsin ordertoaccessthememory. In this respectit mayoftenbeusefulto divide theperceiving actionsof anagentinto internalandexternalpartsand,analogously, theenvironmentmayalsobesplit into internalandexternalcomponents,theinternalenvironmentbeingthememory.
Notethatwe referto theinternalsetof attributesasanenvironment, ratherthana ! � ��2 , sinceit isa physicalstoresimilar to theexternalenvironment.We cannow refinetheagentschemasto includethisconceptof memoryasfollows.
12

� ��$��� N � +,���&� � ���^��@W:�£�� ��$��� N � +,���&�� +a���&� � ����(�@W��£�� �&�K����� � . WE����(� � ! � �a+ � �� � ��E�¤�dR � p� � ��� J �K����� � . WE����(� � ! � �a+ � �� � ��E�¤�dR � p� � ��$���${ � ��WE����(� � ! �8� I � � ! � �^��B$����&� U � � ! � �^��B$������ O } R � �� � �� |} � � ! � ����&$����&�� �&�K����� � . WE����(� � ! � �a+ � �� � ��E�µ´Y� J �K����� � . WB���^�� � ! � �a+ � �� � ��E�>A¨WE����(� � ! � �a+ � p� � ��E�� �&�K����� � . WE����(� � ! � �a+ � �� � ��E�µ¶Y� J �K����� � . WB���^�� � ! � �a+ � �� � ��E�>AD[ cs ��� !�r�L ��� !,` � � � ! � �^��B$������ � � �;��R � �� � �� k� �>�
domI $���$� � ��WE���^�� � ! � I ��� !�r�L ��� !,`aO^O�¦ � �zA¨WB���^�� � ! � �a+ � �� � ��E�
A memoryagent’s possibleperceptsarederived from applyingits perceiving actionsto both itsexternalenvironmentandits internalmemory. Dependingon its goals,theagentwill selecta subsetof theseavailableattributes,asdefinedpreviouslyby
2 � .£. W�����(� � ! � in the� +a����� � ���^��ªW��£�
schema.Theactionthatsuchanagentselectsatany time is alsodeterminedin thesamewayasdefinedpreviouslyin the
� +a���&� � p�schema,sincethememoryis carriedthroughpossibleperceptsandactualpercepts
to theaction-selectionfunction,� +a���&� � p� � ��B�
.
� ��$��� N � +,���&� � ��� +a���&� � ��
� ��$��� N � +,���&��«&� � �K�� ��$��� N � +,���&� � ���^��@W:�£�� +a���&��«&� � �K�WE1���KWE���^��ªW��£�;Af$���$� � ��WB���^�� � ! � I ��� ! � ����B$����&� L $���$��� NBO WB���^�� � ! � �a+ � �� � ��E�
As a result of theserefinements,we must also considerthe consequencesof an action on theenvironmentandmemory. The performanceof someset of actionsmay, in addition to causingachangeto theexternalenvironment,alsocausea changeto thememoryof theagent.In this respect,we define two functions for theseinteractionsbelow, where the external environment function isexactly asdefinedearlier, but thememoryis updatedasa functionof boththe internalenvironment,externalenvironmentandthe currentgoalsof the agent. Goalsarerelevant herebecausethey mayconstrainwhatis recordedin memory, andwhatis not.
� J �K����� � .0�* z��p� � �&�K��� � �� � ���� � � ! � ����&$����&� } R � p� � �� |} � � ! � �^��B$������� �&�K����� � .0�* z��p� � �&�K��� � �� � ���� � � ! � ����&$����&� } � � ! � �^��B$����&� }R � �� � �� |} R ) � . } � � ! � �^��B$����&�
We cannow refineanotherschemato take into accountthesechanges.The following schema,whichspecifieshow amemoryagentinteractswith its environment,is anew versionof the� +a����� � � !�® �&�K��� � �� schemadefinedearlier.
13

� ��$��� N � +,���&� � � !�® �&�K��� � ��6�� ��$��� N � +,���&�� +a���&� � � !�® �&�K��� � p�� J �K����� � .0��� ! � ����B$����&�µ� � � ! � �^��B$����&�� J �K����� � .0��� ! � ����B$����&�ª9M� � � ! � ����B$����&�� J �K����� � .0��� ! � ����B$����&� 9 A¬� J �K���(� � .X�� ����� � �&�K��� � p� � ���� J �K���(� � .X��� ! � ����&$����&��2 � .£.0 d$���${�� N 9�A � �&�K����� � .0�* z��p� � ���K��� � �� � ��Z$���$��� N � J �K���(� � .X��� ! � �^��B$�������2 � .£.< d>+� � .��
Thesememoryagentsaresimilar in spirit to theknowledge-level agentsof GeneserethandNils-son[23], in which an agent’s mentalactionsareviewed asinferenceson its database,so that priorexperienceandknowledgecanbetakeninto accountwhenconsideringwhatactionto take.
4.3 Planning Agents
Planningis the processof finding a sequenceof actionsto achieve a specifiedgoal. Our definitionof agentsrequiresthe presenceof goals,and althoughwe have briefly discussedhow goalsmaybe generated,we have not consideredhow agentsplan to achieve them. This sectionincreasesthecomplexity of theagentspecificationsothatit capturestheessenceof aplanningagent.
4.3.1 Modelling Plans
This involvesdefiningfirst the componentsof a plan, andthenthe structure of a plan, asshown inFigure1. Thecomponents,which we call plan-actions, eachconsistof a composite-actionanda setof relatedentitiesasdescribedbelow. Thestructureof plansdefinestherelationshipof thecomponentplan-actionsto oneanother. For example,plansmaybe total anddefinea sequenceof plan-actions,partial andplacea partialorderon theperformanceof plan-actions,or treesand,for example,allowchoicebetweenalternative plan-actionsatevery stagein theplan’s execution.
Weidentify four typesof actionthatmaybecontainedin plans,calledprimitive, template, concurrent-primitive andconcurrent-template. Theremay be othercategoriesandvariationson thosewe havechosen,but not only do they provide a startingpoint for specifyingsystems,they alsoillustratehowdifferent representationscan be formalisedand incorporatedwithin the samemodel. A primitiveaction is simply a baseactionasdefinedin the agentframework, andan action templateprovidesa high-level descriptionof what is requiredby an action,definedasthe setof all primitive actionsthat may result throughan instantiationof that action-template.An examplewherethe distinctionis manifestis in dMARS (seeSection7.2), wheretemplateactionswould representactionformulaecontainingfreevariables.Onceall thefreevariablesareboundto values,theactionis thenaprimitiveactionandcanbeperformed.Wealsodefineaconcurrent-primitive actionasasetof primitiveactionsto be performedconcurrentlyanda concurrentaction-templateasa setof templateactionsthat areperformedconcurrently. A new type,
� ����±-·�$4W, is thendefinedasacompound-actionto includeall
four of thesetypes.Actions mustbe performedby entities,so we associateevery composite-actionin a plan with a
setof entities,suchthateachentity in thesetcanpotentiallyperformtheaction.At somestagein theplanningprocessthis setmay be empty, indicatingthat no choiceof entity hasyet beenmade. Wedefinea plan-actionasa setof pairs,whereeachpair containsa composite-actionanda setof thoseentitiesthatcouldpotentiallyperformtheaction.Plan-actionsaredefinedasasetof pairs ratherthanasinglepair sothatplanscontainingsimultaneousactionscanberepresented.
14

¸:¹@º<»�º0¼<º<½�¾±¿·¿ÁÀ�Â^¼<º0Ã(ÄÅ�¾ª»ÇÆdÈÊÉ�¼X¾§¿·¿ÌË�À�Â^¼<º0Ã(ÄÍ Ã(Ä1ÂK¸M¹Kº<»�º<¼<º<½�¾§¿·¿�Ë�ÀMÂ^¼<º0Ã(ÄÍ Ã(Ä1Â�Å�¾ª»±ÆdÈÊÉ(¼X¾·¿·¿�Ë&Î<Ë�À�Â^¼<º<Ã(ÄaÏÀ�Â^¼<Ä Í Ã(»±Æ>Ð�Ð ¿t¸:¹Kº<»lÑ ÑÒ¸M¹Kº<»�º<¼<º<½�¾�Ó ÓÔ Å�¾ª»ÇÆBÑ Ñ�Å1¾ª»±ÆdÈÊÉ�¼X¾�Ó ÓÔ Í Ã(Ä1ÂK¸M¹Kº<»lÑ Ñ Í Ã(Ä�ÂK¸:¹Kº<»�º0¼<ºÕ½�¾�Ó ÓÔ Í Ã(Ä1Â�Å�¾ª»±ÆBÑ Ñ Í Ã(Ä1Â�Å�¾ª»±ÆdÈÊÉ(¼X¾�Ó Ó
Å1Ã�¼0É(È ¸�ÈÊÉ(Ä4¿·¿seq�ÈÊÉ(Ä�À�Â^¼<º0Ã�Ä
Å�¹�¾K¾T¸MÈÊÉ(ÄÖЩР¿fÅ,º ÆEÑ ÑÒ¸MÈÊÉ(ÄpÀMÂ^¼<º0Ã(Ä�Ó ÓÔØ× Ã�¹TÙ�Ñ Ñ<Ë&Ú^ÎÒ¸MÈÊÉ(ÄpÀMÂ^¼<º0Ã(Ä>Û�Å�¹�¾T¾T¸�ÈÊÉ(Ä�Ï�Ó Ó
¸MÈÊÉ(Ä Ð©Ð ¿Ü¸MÉ(¹@¼@Ñ ÑÒ¸�É�¹ª¼<º0É(È ¸�ÈÊÉ(ÄdÓ ÓÔ Å1Ã(¼0É�飄 Ñ�Å1Ã�¼0É�È ¸MÈÊÉ(Ä�Ó ÓÔ Å�¹�¾T¾�Ñ Ñ�Å�¹�¾K¾T¸MÈÊÉ(Ä�Ó Ó
ÆdÈÊÉ�Ä�ÆpÉ(º<¹KݧÐ�¸�ÈÊÉ(Ä4Þ Ë�¸MÈÊÉ(ÄpÀMÂ^¼<º0Ã(ÄÆdÈÊÉ�Ä�¾ªÄ�¼<º<¼<ºX¾ªÝ·Ð�¸MÈÊÉ(Ä4ÞuË·ßMÄ1¼<º0¼<à^á>Ã^â�¾�ÈÆdÈÊÉ�Ä�É�Â^¼<º0Ã�Ä1Ý·Ð�¸�ÈÊÉ(ÄzÞ Ë�À�Â^¼<º<Ã(Ä
¸�ÈÊÉ�ÄpÀ�Â^¼<º<Ã(Ä4¿·¿ÌË�ΰÀMÂ^¼<Ä Í Ã(»ÇÆ8Û'Ë�ß:Ä�¼<º<¼<à�á>Ã^â�¾�ÈXϸ�É�¹ª¼<º0É(È ¸�ÈÊÉ(Ä4¿·¿ÁãªÆ�ݧÐ�¸MÈÊÉ(Ä�À�Â^¼<º0Ã(Ä�äu¸�ÈÊÉ(Ä�À�Â^¼<º0Ã�Ä Ô^å É�æ�ç·Ð�¸MÈÊÉ(ÄpÀMÂ^¼<º0Ã(Äzè
Î*É�æ�É�Ï/éê Æ�Ý�ë¤ì�Î*É�æ�ç�Ï ê Æ�Ý�ë8í¬ÎTç(æ^É�ϱéê Æ�Ý�ë¤èÇÆ�Ý�î
Figure1: Plancomponentsandstructure
We specify threecommonly-foundcategoriesof plan accordingto their structureas discussedearlier, thoughothertypesmaybespecifiedsimilarly.
k Partial Plans.
A partial plan imposesa partial orderon the executionof actions,subjectto two constraints.First, an actioncannotbe performedbeforeitself and,second,if plan-action
�is before
�,�
cannotbebefore�. Formally, apartialplanis a relationshipbetweenplan-actionssuchthatthe
pair I � L � O is not in thetransitiveclosureand,further, if thepair I � L � O is in thetransitiveclosureof therelationthenthepair I � L � O is not.
k Total Plans. A planconsistingof a total orderof plan-actionsis a total plan. Formally, this isrepresentedasa sequenceof plan-actions.
k TreePlansA planthatallowsachoicebetweenactionsateverystageis atree.In general,a treeis eithera leafnodecontainingaplan-action,or a fork containinganode,anda(non-empty)setof brancheseachleadingto a tree.
Theseareformalisedin Figure1.Using thesecomponentswe candefinea planningagent. Any planningagentmusthave a set
of goalscurrentlybeingpursued,+a � .��
, anda setof plansassociatedwith thesegoals,W�. � �E�
. Theplansassociatedwith eachof thegoalsis givenby thefunction,
� �� � ! �@W�. � �,+� � . . Therewill alsobearepositoryof all goals,
+� � . ��� ���, a repositoryof all plans,
W�. � � ��� ���, anda functionassociatingplans
in theW�. � � ��� ���
with thegoalsin the+a � . ��� ���
,W�. � �a+a � .
.
15

� . � �B� � �a+ � +a���&�� +a���&�� �� � ! �@W�. � �,+� � .·� ) � . } R � . � �W�. � �B�>��R � . � �W�. � �,+� � .·� ) � . } R � . � �+a � . ��� ���8��R ) � .W�. � � ��� ���¤��R � . � �dom� �� � ! �ªW�. � �a+� � ./A?+� � .©�ï I ran� �� � ! �@W�. � �,+� � . O A¨W�. � �E�ï I ranW�. � �,+� � . O A¨W�. � � ��� ���
domW�. � �a+� � .�¥~+� � . ��� ���
+a � .��¤¥¨+a � . ��� ���
Theway in whichaplanningagentchooseshow to actis now alsoa functionof its currentplans.This is shown in the
� . � �B� � �a+ � +a���&� � ��schemabelow.
� . � �B� � �a+ � +a���&� � p�� . � �B� � �a+ � +a���&�� +a���&� � ��W�. � �&� � �,+ � +,���&� � p� � ��E�¤��R ) � . } R � . � � } ¡ � ��2 } � � ! � ����&$����&� } R � �� � ��s +��;��R ) � . � W��;��R � . � � �'! � ¡ � ��2 � ��� ! � � � ! � ����&$����&�
kI W�. � �B� � �a+ � +a���&� � p� � ��B�4+���W�� ! ��� !BO ¥u � W �d��� . � � � ���domW�. � �B� � �a+ � +,���&� � �� � ��E�>AD[�+� � .©� cs W��>��R � . � � k W&�>� domI W�. � �B� � �a+ � +a����� � �� � ��E�4+a � .�� O�¦ W&�zAjW�. � �E�
Here,we have only extendedour descriptionof an agentto includethe ability to plan. Furtherwork is necessaryto investigateandspecifyhow theplansof anagentalsoaffect its reasoning.Forexample,we mustaddressthequestionsof whenanagentshouldabandonplans,generatenew plans,abandongoalsbecauseof a lack of appropriateplans,andsoon. However, this is beyond thescopeof thecurrentwork andwill not be addressedfurther in this paper. Nevertheless,we have provideda framework within which suchissuesandrelatedtheoriesandsystemscanbeformally presentedasweshallshow in thenext sectionwhenweshow how plansaremodelledfor variousexistingsystems.
4.4 SociologicalAgents
4.4.1 Agent Models
We have alreadystatedthatanagentwill have certainperceptsavailableto it. If anagentcanmakesenseof theseattributesandgroupcertainsetsof themtogetherinto entity-describingmodels,thenwe have thebeginningsof a sociologicalagent,which we take to be anagentthat is awareof otheragents,andtheirroleandfunction.Specificallytheagentframework providesthestructurethatallowsanagentto constructmeaningfulandusefulmodelsof theserolesandfunctionsin a very simplebuteffective way. Suchmodelsaredescribedbelow.
If theagentdoesnothaveamemory, thentheunionof theattributesof thesetof entitiesit modelsmustbea subsetof its currentperceptions.If theagentdoeshave a memory, however, this conditioncanberelaxed.
16

Onceagain,we refinetheschemasgiven earlierto constructour modelof a sociologicalagent.Theschemabelow describesanagentthathasgroupedattributesinto distinctentities.
� +a���&� � p ���. � �&� � � � �(�� +a���&��«&� � �K����&� � � � �����dR � �&� � � N���&� � � � ���{�AC[ cï;[,�>�����&� � � � �(� k � %Ò� �*��� �*� � �K�(� c ¥ � �� � � . WE���^��ªW��£�
Thoughthe agentdoesnot necessarilyhave memory, this still constitutesa modelof the worldthatit possesses,sinceit imposesastructureby groupingattributes.Thiskind of modellingis usedbymechanismssuchasa robotarmon aproductionline. Thearmis only concernedwith theperceptualstimuli neededfor it to performtheappropriateactionon anentity. In many cases,it will not needtoknow aboutthecapabilitiesof theentity.
Now anagentmay, in addition,associatecapabilitieswith someentity, andits modelof theworldwill thereforebea collectionentitiesandobjects.(This will typically involve theuseof memory, butwe will not considermemoryfurtherhere,sothatwe mayclearlydifferentiatethequalitiesthatarisefor distinctreasons.)
� +a���&� � p ���.�� �*� ��p�£�� +a���&� � p ���. � �&� � � � �(� �*� ����£�;��R�� �*� ���� �*� ����£���AC[ c �*� ����£�>¥C���&� � � � ���
Similarly, a moresophisticatedagentmaybeableto modeltheworld asa setof entities,objectsandagents.
� +a���&� � p ���. � +,���&�£�� +a���&� � p ���.�� �*� ��p�£�� +a�����£�;��R � +,���&�� +a�����£���AD[ c� +a�����£�>¥u �*� ��p�£�
At this level of modelling,anagentis awareof theconceptof agenthood.Thatis, it is awarethatsomeof the entitiesin the world areservinga purpose.However, we cannotyet claim this to be asociologicalagent,sinceit mustbeawarenotonly thatagoalis beingsatisfied,but also
2§" N thegoalexists. In otherwords,it mustknow that thegoalhasbeengeneratedby someagent.A sociologicalagentmustthusunderstandtheconceptof autonomousagents,which aretheonly agentscapableofgeneratinggoals.Wethereforedefineasociological agentto beany agentthathastheability to modelanentityasanautonomousagent.
Note that in building up this notionof a sociologicalagent,we areproviding only a basicfoun-dationalconceptthatallows usto describeagentscapableof modellingothers.Furthercategoriesofagentsmay be constructedon top of this and, indeed,this notion of sociologicalagentsis distinctfrom socialagentsthatinteractwith others.However, in orderfor socialbehaviour to beeffective,wearguethatsociologicalcapabilitiesareneeded.
17

«�� � �.0�+ � � . � +a������ +a���&� � p ���. � +,���&�£�� � �T����$� � � � +,���&�£�8��R � � �T����${ � � � +,���&�� � �T����$� � � � +,���&�£���AD[ c� � �T����$� � � � +,���&�£�¥ � +,���&�£�
According to this view, an agentcanbe sociologicaleven it hasno socialcapabilities(suchasrhetoricaldevices)otherthanthatit recognisesautonomy.
If we expandthe previous schema,thena sociologicalagentconsidersthe world to consistofentities,objects,agentsandautonomousagents,whereall autonomousagentsareagents,all agentsareobjectsandall objectsareentities.In addition,if it canrecogniseagentsthatareautonomousandobjectsthatareagentsthenit will certainlybeableto recogniseagentsthatarenot autonomousandobjectsthatarenot agents.Theseareknown asServerAgentsandNeutral Objectsrespectively, andaredefinedasfollows.
«:��� ! ��� � +a������ +a���&�$��� � ! � � � ��B��AD[ c
ð � � ��� � .�� �*� ����� �T� ����+a � .���AD[ c 7Ø$��� � ! � � � ��E�;AD[ c
A sociologicalagentmay also have a modelof itself. This is given in the following schema.Notethata sociologicalagentis not necessarilyanautonomousagent,nor is anautonomousagentasociologicalagent.(For adefinitionof �#����� �E�1��� thereaderis askedto consulttheAppendixA.)
«�� � �.0�+ � � . � +a����� � � ���.«�� � �.0�+ � � . � +a������:� � ��� � .< �T� ����£�>�dR ð � � ��� � .�� �*� ��p������ ! ��� � +,���&�£�;�dR�«���� ! ��� � +a���&�����. � � �#����� �E�1��� w�� +,���&� y� +a�����£�zA � � �T����$� � � � +a���&�£�µ´t����� ! ��� � +,���&�£� �*� ����£�zAf��� � ��� � .< �*� ����£�µ´ � +a���&�£�
Naturally, if an agentwant to take advantageof its ability to modeltheseagents,it will needtousecertainpersuasive devicesasdescribedin [6], but whichwill notbeconsideredhere.
Suppose,for example,thata robotwishesto usea radio. Also, supposethat the radio is alreadyswitchedon, andthat the robot understandsthat the radio is servingsomepurpose.Sincethe robotis a sociologicalagentandunderstandsautonomy, it is awarethat theradio is servingsomepurpose,ultimately for someautonomousagent. The robot can simply take control of the radio (if it hadthenecessarycapabilities),fully awarethat theradiowould not thenbeservingits original purpose.Alternatively, the robot may decidenot to interferewith the radio. In both cases,thereis no social
18

behaviour. However, if the robothastheability to modelthe relationshipbetweentheradioandtheagentsfor which that radio is servinga purpose,which may in turn be servinga purposefor otheragents,it may be ableto identify the autonomousagentat the top of the regressive agentchain. Inthis case,therobotmayattemptto persuadethis agentto releasetheradio from its original purpose,sothatit mayuseit instead.
In otherwords,we still needan understandingof the relationshipsbetweenthe variousentitiesin the world accordingto the purposesthey serve. We needto be able to identify the originatorsof thesepurposesor goals,the autonomousagentsthat generatedthem. This requiresan ability tomodelanagentdirectly engaging a server agent,andanautonomousagentcooperating with anotherautonomousagent.We now specifythesocialstructureswe call engagementsandcooperations thatexist in amulti-agentworld.
4.4.2 Engagementand Cooperation
A direct engagementtakesplacewhenever a neutral-objector a server-agentadoptssomegoals. Ina direct engagement,an agentwith somegoals,which we call theclient, usesanotheragent,whichwe call the server, to assistthem in the achievementof thosegoals. Note that accordingto ourprevious definition, a server-agentis non-autonomous.It eitherexists alreadyas a result of someotherengagement,or is instantiatedfrom a neutral-objectfor the currentengagement.Thereis norestrictionplacedon aclient-agent.
We definea directengagementin thefollowing schema,which consistsof a client agent,�. � ���&�
,a server agent,
����� ! ��� , andthegoal that����� ! ��� is satisfyingfor
�. � ���&�. Necessarily, anagentcannot
engageitself, andbothagentsmusthave thegoalof theengagement.
ñ>� �^���� � �a+ � +,��$�������. � ������� � +a���&������ ! ���¤�E«���� ! ��� � +,���&�+a � ./� ) � .�. � �����4�AD����� ! ���+a � .§� I �. � ���&� % +� � .©�'¶t����� ! ��� % +� � .©� O
An engagementchain representsasequenceof directengagements. For example,supposearobotusesacomputerterminalto runa programto accessa databasein orderto locatea library book,thenthereis adirectengagementbetweentherobotandtheterminal,of theterminalandtheprogram,andof theprogramandthe database,all with the goal of locatingthebook. An engagementchainthusrepresentsthegoal andall the robotsinvolved in the sequenceof direct engagements.In the aboveexample,theagentsinvolvedwouldbeasfollows:
ò � �� La� ���($ � � � . L � �^�+d� � $ L ñ8� � ����� ���
Specifically, an engagementchain comprisessomegoal+� � .
, the autonomousclient-agentthatgeneratedthe goal,
� � �T � +a����� , anda sequenceof server-agents,�" ��� �
, whereeachone in the se-quenceis directly engagingthe next. For any engagementchain,theremustbe at leastoneserver-agent,all theagentsin involved mustshare
+� � ., andthesameagentcannotbe involved morethan
once.
19

� �a+ � +a��$����&��-±" ��� �+a � ./� ) � .� � �T � +a���&�n� � � �T����${ � � � +,���&��" ��� �t�
seq¢ � +,���&�
+a � .§� � � �T � +,���&� % +a � .��+a � .§�tï>[��;� � +a�����µe,�>�ran�" ��� � k � % +� � .©� c� I ran
�" ��� � O A � �" ��� �
Thetermcooperation is reservedfor useonly whenthepartiesinvolvedareautonomousandpo-tentially capableof resisting. If they arenot autonomous(andnot capableof resisting),then onesimply engagestheother. A cooperation describesa goal,theautonomousagentthatoriginally gen-eratedthatgoal,andthoseautonomousagentswhohave adoptedthatgoalfrom thegeneratingagent.Thusin thisview, cooperationcannotoccurunwittingly betweenautonomousagents.
-·p�WE��� � � � ��+a � ./� ) � .+,������� � � � �a+ � +a���&�n� � � �T����${ � � � +,���&����WE��� � � � �a+ � +a���&�£���R � � �T����$� � � � +,���&�� ���WB��� � � � �,+ � +,���&�£�{ó rs ��� �����WB��� � � � �,+ � +,���&�£� k +� � .·� �d�&% +� � .��+a � .§�Á+a������� � � � �a+ � +a����� % +a � .��
A sociologicalagentthusviews theworld asacollectionof engagements,engagementchainsandcooperationsbetweentheentitiesin theworld.
ð ��2·«�� � �.0�+ � � . � +a����� � � ���.«�� � �.0�+ � � . � +a����� � � ���. a���a+ � +a��$����&����R ñ>� ����p� � �a+ � +a��$����&����a+��" ��� �t�dR � �a+ � +a��$����&��-±" ��� ����WE��� � � � ��B�8��Rt-·p�WE��� � � � ��
Theseschemasprovide usefulstructurethat canbe exploited by intelligent agentsfor moreef-fective operation.This is only possibleif eachagentmaintainsa modelof their view of the world.Specifically, eachagentmustmaintaininformationaboutthedifferententitiesin theenvironment,sothat both existing andpotentialrelationshipsbetweenthoseentitiesmay be understoodandconse-quentlymanipulatedasappropriate.
5 Application of the Framework
Thestructuresdescribedabove will bepresentto agreateror lesserextentin all multi-agentsystems.Naturally, thesemodelsand the modelsthat an agenthasof otherentitiescanbecomeeven moresophisticated.For example,anagentmaymodelotheragentsasplanningagentsaswe shallseelaterin this section.In this way, agentscancoordinatetheir activities andenlistthehelpof othersin orderthatplanscanbeachievedsuccessfullyandefficiently.
In thissection,wecompletethepathfrom our initial framework throughmodelsof varyinglevelsof abstractionto detailedformal specificationsof threedistinctapplications.Thefirst is dMARS (the
20

distributedMulti-Agent ReasoningSystem),which hasbeenappliedin perhapsthemostsignificantmulti-agentapplicationsto date. The secondis the well-known contractnet protocol [51, 52, 12],which againis situatedin the domainof practical implementedsystems. The third applicationisthesocialdependencenetwork[49, 50], which is a structurethat forms thebasisof a computationalmodelof SocialPower Theory[7, 8]. Thesenetworks allow agentsto reasonaboutandunderstandthecollective groupof agentsthatmake up themulti-agentworld in which they operate.Below, weconsidereachof thesein turn,andshow how they canbeformalisedin thecontext of previousmodels.In orderto achievethis,wereuse,refineandelaboratetheschemaspresentedsofar, in orderto specifythesemulti-agentsystemsata detailedlevel of description.
5.1 Application 1: The distrib uted Multi-Agent ReasoningSystem(dMARS)
While many differentandcontrastingsingle-agentarchitectureshavebeenproposed,perhapsthemostsuccessfularethosebasedon thebelief-desire-intention (BDI) framework. In particular, theProce-dural ReasoningSystem(PRS),hasprogressedfrom an experimentalLISP version to a full C++implementationknown asthedistributedMulti-Agent ReasoningSystem(dMARS).PRS,which hasits conceptualroots in the belief-desire-intention (BDI) modelof practicalreasoning,hasbeenthesubjectof a dual approachby which a significantcommercialsystemhasbeenproducedwhile thetheoreticalfoundationsof theBDI modelcontinueto becloselyinvestigated.
As part of our work, we have soughtto formalisetheseBDI systemsthroughthe direct repre-sentationof the implementationson the one hand,and throughrefinementof the detailedmodelsconstructedthroughthe abstractagentframework on the other. This work hasincludedthe formalspecification[16] of the AgentSpeak(L)languagedevelopedby Rao[46], which is a programminglanguagebasedonanabstractionof thePRSarchitecture;irrelevantimplementationdetailis removed,andPRSis strippedto its bareessentials.Our specificationreformalisesRao’s original descriptionsothat it is couchedin termsof stateandoperationson statethatcanbeeasilyrefinedinto animple-mentedsystem.In addition,beingbasedonasimplifiedversionof dMARS,thespecificationprovidesa startingpoint for actualspecificationsof thesemoresophisticatedsystems.Subsequentwork con-tinuedthis themeby moving to producean abstractformal specificationof dMARS itself, throughwhichanoperationalsemanticsfor dMARSwasprovided,offeringabenchmarkagainstwhichfutureBDI systemsandPRS-like implementationscanbecompared.
Due to spaceconstraints,we cannothopeto getanywhereneara specificationof eitherof thesesystems,but insteadwe aim to show how we canfurther refinethemodelsof plansdescribedaboveto get to a point at which we canspecifythedetailsof suchimplementations.Thevalueof this is intheeaseof comparisonandanalysiswith themoreabstractnotionsdescribedearlier.
We begin our specification,shown in Figure2 by definingthe allowablebeliefsof an agentindMARS, which are like PROLOG facts. To start,we definea term, which is eithera variableor afunction symbolappliedto a (possiblyempty)sequenceof terms,andan atom, a predicatesymbolappliedto a (possiblyempty)sequenceof terms. In turn, a belief formula is eitheran atomor thenegationof anatom,andthesetof beliefsof anagentis thesetof all groundbelief formulae(i.e. thosecontainingno variables). (We assumean auxiliary function
� ��. ! � ��� which, given a belief formula,returnsthesetof variablesit contains.)Similarly, asituationformulais anexpressionwhosetruthcanbeevaluatedwith respectto a setof beliefs.A goal is thena belief formulaprefixedwith anachieveoperatoror asituationformulaprefixedwith aqueryoperator. Thusanagentcanhaveagoaleitherofachieving astateof affairsor of determiningwhetherthestateof affairsholds.
Thetypesof actionthatagentscanperformmaybeclassifiedaseitherexternal(in whichcasethedomainof theactionis theenvironmentoutsidetheagent)or internal (in whichcasethedomainof the
21

w ¡ � � L�ôM� �&« N $ L � ���� �« N $ y� ���($õ�0��A ! � �EöÊö ¡ � �d÷Ê÷�e �(� ����T��EöÊö ô:� �B« N $ U seq � ���($Ì÷Ê÷� �T�$"#� � �� � �^�� �« N $�K���($8�;�
seq � ���($
ø ��. � � ��ô ��($ � . � �0��AùW#1��öÊö � �T�$�÷Ê÷4e;�����öÊö � �T�$�÷Ê÷ø ��. � � � A>Au[ � � ø ��. � � ��ô ��($ � . � e � ��. ! � ��� � A=ú k � c« � � � � � � �� ô ���$ � . � �0��A � ��. � ��($töÊö ø ��. � � �^ô ���$ � . � ÷Ê÷e � �� MöÊöª« � � � � � � �� ô ���$ � . � U « � � � � � � �� ô ���$ � . � ÷Ê÷eD��EöÊöª« � � � � � � �� ô ��($ � . � U « � � � � � � �� ô ��($ � . � ÷Ê÷eu��� � �{e � � .����
) � ./�0��A � �" � � ! �,öÊö ø ��. � � ��ô ��($ � . � ÷Ê÷4e¤v � ��� N öÊöª« � � � � � � �� ô ���$ � . � ÷Ê÷� J � � p� � ��� � $��¤� � �� � ��B« N $�K���($8�;�
seq � ���($
® �&� � �� � ����0��A � � MöÊö ø ��. � � ��ô ���$ � . � ÷Ê÷lea����$� ! �,öÊö ø ��. � � ��ô ��($ � . � ÷Ê÷
� � � +p+,��� � ! ���&���0��A � � � ��.0� ! ������öÊö ø ��. � � � ÷Ê÷eu����$ � ��.0� ! ���&��öÊö ø ��. � � � ÷Ê÷eD�T�.0 �� ! ������öÊö � �T�$Ì÷Ê÷eS+a � .X� ! ���&��öÊö ) � .*÷Ê÷ø � � ���"��0��Aû� J � � �� � ��§öÊö � J � � �� � ���÷Ê÷4e � �&� � p� � ��·öÊö ® �&� � �� � ���÷Ê÷4ea� � � +� � .ªöÊö ) � .�÷Ê÷ø � N �0��A � �� MöÊöª«&� � �K��÷Ê÷4e ô ���ü:öÊö°R�¢ I «&� � �K� U ø � � ���" U ø p NBO ÷Ê÷� . � �� � ! � � � � +p+,��� � ! ���&����&�K� J �n� �#�1�^� �E����� w « � � � � � � �� ô ���$ � . � y� p N � ø p N$ ��� �&�n�E« � � � � � � �� ô ��($ � . �� � �l� seq® ��� � p� � ��� ��� ./� seq® ��� � p� � ��
Figure2: Plansin dMARS
22

actionis theagentitself). Externalactionsarespecifiedasif they areprocedurecalls,andcompriseanexternalactionsymbol(analogousto theprocedurename)takenfrom theset
w�� p� � ��&« N $ y , andasequenceof terms(analogousto theparametersof theprocedure).Internalactionsmaybeoneof twotypes:addor removea belief from thedatabase.
Plansareadoptedby agentsand,onceadopted,constrainanagent’s behaviour andactas inten-tions. They consistsof six components:an invocationcondition (or triggering event); an optionalcontext (asituationformula)thatdefinesthepre-conditionsof theplan,i.e.,whatmustbebelievedbytheagentfor aplanto beexecutable;theplan body, which is a treerepresentinga kind of flow-graphof actionsto perform;amaintenanceconditionthatmustbetruefor theplanto continueexecuting;asetof internalactionsthatareperformedif theplansucceeds;andfinally, asetof internalactionsthatareperformedif theplanfails. Thetreerepresentingthebodyhasstatesasnodes,andarcs(branches)representingeithera goal,aninternalactionor anexternalactionasdefinedbelow. Executinga plansuccessfullyinvolvestraversingthetreefrom theroot to any leafnode.
A triggereventcausesaplanto beadopted,andfour typesof eventsareallowableastriggers:theacquisitionof a new belief; the removal of a belief; the receiptof a message;or theacquisitionof anew goal. This last type of trigger event allows goal-driven aswell asevent-driven processing.Asnotedabove, plan bodiesaretreesin which arcsarelabelledwith eithergoalsor actionsandstatesareplaceholders. Sincestatesarenot importantin themselves,we definethemusingthe given setw «&� � �K� y . An arc(branch)within aplanbodymaybelabelledwith eitheraninternalor externalaction,or a subgoal.Finally, adMARS planbodyis eitheranendtip containinga state,or a fork containingastateanda non-emptysetof brancheseachleadingto anothertree.
All thesecomponentscanthenbe broughttogetherinto the definition of a plan. The basicex-ecutionmechanismfor dMARS agentsinvolves an agentmatchingthe trigger andcontext of eachplanagainstthechosenevent in theeventqueueandthecurrentsetof beliefs,respectively, andthengeneratinga setof candidate,matchingplans,selectingone,andmakingaplan instancefor it.
Spaceconstraintsprohibit going into further detailsof the variousaspectsof this work, but wehopethat it hasbeenpossibleto show how increasinglevels of analysisanddetail enabletransitionbetweenabstractconceptualinfrastructureandimplementedsystem.
5.2 Application 2: The Contract Net Protocol
TheContractNetasdescribedbySmith[12, 51, 52] isacollectionof nodesthatcooperatein achievinggoalswhich, together, satisfysomehigh-level goalor task.Eachnodemaybeeithera manager whomonitorstaskexecutionandprocessestheresults,or a contractor who performstheactualexecutionof thetask.
5.2.1 The Contract Net Structur e
First, we specify the different kinds of entity from which a contractnet is constructed,andwhichparticipatein it. A nodein acontractnetis just anobject.
- ð � ��� �T� ����
Then,reusingourdefinitionof agents,wedefinea-·��&��� � p� � +,���&�
asany nodewhich is currentlyservingsomepurpose.
23

-·��&��� � �� � +a�����- ð � ��� +a���&�
Davis andSmith[12] alsodescribeasingleprocessornodein adistributedsensingexamplecalledamonitornode,whichstartstheinitialisationasthefirst stepin netoperation.If this is justanodethatpasseson informationto another, thenit is nodifferentto themanagerspecifiedabove. If it generatedthegoalor taskto performby itself, thenit is anautonomousagent.
� �� � �T��� � �T����$� � � � +a���&�-·��&��� � �� � +a�����
Thecontractnetconsistsof��� ����
, whichareobjects.Of these,someare���&��� � p� � +a���&�£�
, whichareagents,anda subsetof theseare
$��� � �T����, whichareautonomousagents.
� .°. ð p ��(���� ��(�¤��Rt� �*� ��p����&��� � �� � +a�����£�¤��Rt� �T� ����$��� � �T����>��R � � �T����$� � � � +a���&�$��� � �T����¤¥u���&��� � �� � +a�����£�¥ ��� ��(�
However, this is preciselythe sameasthe schema,«�� � �.0�+ � � . � +a�����
, which describeda soci-ological agent’s view of the world. We canthereforedefine
� .°. ð p ��(�in termsof this schemaby
renamingor substitutingthevariousstatevariableswithin it asfollows.� .°. ð p ��(�«�� � �.0�+ � � . � +a����� w ��� ��(��ý# �T� ����£� L ���&�*� � �� � +a�����£�1ý � +a���&�£� L $��� � �T��(��ý � � �T����$� � � � +,���&�£� y
A managerengagescontractorsto performcertaintasks,wherea taskis just thesameasa goal,sinceit specifiesastateof affairsto beachieved.
� � ��ü�A;A ) � .In a contractnet,a
���&��� � ��comprisesa task,anda pair of nodes,a manageranda contractor.
Yetagainwecandefineacontractby reusingpreviousschemas.A contractis aspecifictypeof directengagementin which the client of the engagementis the managerof the contract,the server is thecontractor, and the goal of the engagementis the task of the contract. Consequently, we defineacontractasfollows.
-·��&��� � ��ñ>� �^���� � �a+ � +,��$������ w $ � � � +a����ý#�. � ���&� L ���&��� � ��T��dý������ ! ��� L � � ��üBý�+� � . y
Now we candefinethesetof all contractscurrentlyin operationin thecontractnet. Theschemabelow includes
� .£. ð � a�(�, anddefines
���&��� � ��£�to bethesetof all contractscurrentlyin thenet.The
managersarethesetof nodesmanagingacontractandthecontractorsarethesetof nodescontracted.Theunionof thecontractorsandthemanagersgivesthesetof contractagents.
24

� .°.*-·��&��� � ��£�� .°. ð p ��(����&��� � ��£�8��R�-·��&��� � p�$ � � � +a�����>��RZ-·��&��� � �� � +a���&����&��� � ��T����8��R�-·��&��� � p� � +,���&�$ � � � +a������AC[al�±-·������ � p�4e#;�Ø���&��� � p�£� k % $ � � � +a��� c���&��� � ��T����;AD[a;�Ç-·��&��� � ��4eE>�Y���&��� � ��£� k % ���&��� � ��T�� c$ � � � +a�����n´Z���&��� � ��T����>A¯���&��� � �� � +,���&�£�
We also introducethe notion of eligibility. A nodeis eligible for a task if its actionsand at-tributessatisfythe taskrequirements.
� . � + �*��� . � � N is a typecomprisinga setof actionsandattributesrepresentinganeligibility specification.This hasjust thesametypeasanobject.
� . � + �*��� . � � N A;Aþ� �*� ��p�
Thefirst stepin establishinga contractis a taskannouncement. A � � ��ü � �&�� � �����$����&� is issuedby a
«����� a���to a setof
ò �� � W � ���&�s to requestbids for a particular � � ��ü from agentswith a given� . � + �*��� . � � N specification.
«:���� ����>A;Aÿ- ð � ��ò �� � W � ���&��A>Aÿ- ð p ��
� � ��ü � �B�� � �����$����&������� a���8�B«����� ����������;��R ò �� � W � ���&�� � ��ü�� � � ��ü��. � + �*��� . � � N � � . � + ����� . � � N
Noticethatthecombinationof a tasktogetherwith aneligibility is, in fact,an� +,���&�
requirement.In responseto a taskannouncement,agentscanevaluatetheir interestusingtaskevaluationpro-
ceduresspecificto theproblemathand.If thereis sufficient interest,thenthatagentwill submitabidto undertake to performthetask.A bid involvesa nodethatdescribesa subsetof itself in responsetoaneligibility specification,whichwill beusedin evaluatingthebid.
ø�� ���� ��¤�Ç- ð � ����. � + �*��� . � � N � � . � + ����� . � � N��. � + �*��� . � � N % � W ����� . � � � ���¤¥u���� �� % � W �d��� . � � � �(���. � + �*��� . � � N %Ò� �*��� �*� � �K���>¥u���p �� %Ò� �*��� �*� � �K���
The stateof the contractnet cannow be representedasthe currentsetof nodes,contracts,taskannouncementsandbids.Eachtaskannouncementwill haveassociatedwith it somesetof bids,whicharejust eligibility specificationsasdescribedabove. In addition,eachnodehasa meansof decidingwhetherit is capableof, andinterestedin, performingcertaintasks(andsobiddingfor them).
25

-·��&��� � �� ð ���� .°.*-·��&��� � ��£���� ��;� � � ��ü � �&�� � �����$����&� |} R ø'� � �&�K���^���(�K�� h�Ç- ð p �� } � � ��ü } � p�.� � ��ü � �B�� � ��(��$����&�£�8��R � � ��ü � �B�� � ��(��$������� � ��ü � �B�� � ��(��$����&�£�;A dom
��� 1�
5.2.2 Making TaskAnnouncementsand Bids
Theoperationof a nodemakinga taskannouncementis thengivenin theschemabelow wherethereis achangeto
-·������ � p� ð ���, but nochangeto
� .£.�-·��&��� � ��£�. A nodethatissuesa taskannouncement
must be an agent. Note that the variableswith a3
suffix indicate inputs. The secondpart of theschemaspecifiesthat the recipientsandthesendermustbenodes,that the taskmustbe in thegoalsof thesender, andthat thesendermustnot be ableto satisfytheeligibility requirementsof the taskalone.Finally, thetaskannouncementis addedto thesetof all taskannouncements,andanemptysetof bidsis associatedwith it.
� � ü�� � � ��ü � �B�� � ��(��$����&�6 -·��&��� � �� ð ���� � .°.*-·��&��� � p�£�$�3l�±-·��&��� � �� � +a������ � ��ü � �B�M3>� � � ��ü � �B�� � �����$����&�$�3;����� ��(�� � ��ü � �B�M3 % ������¥ ��� a�(�� � ��ü � �B�M3 % ������ ����¤AC$Ì3� � ��ü � �B�M3 % � � ��ü��x$Ì3 % +a � .��� I^I � � ��ü � �B�M3 % ��. � + �*��� . � � N % � W �d��� . � � � �(��¥ $�3 % � W �d��� . � � � �(� O 7
I � � ��ü � �B��3 % ��. � + ����� . � � N %Ò� �*��� ��� � �K���¥=$Ì3 %Ò� �*��� �*� � �K�(� O^O� � ��ü � �B�� � ��(��$����&�£��9�A¯� � ��ü � �B�� � ��(��$������£�µ´t[�� � ��ü � �&�M3 c��� ���9&A ��� ���´t[ I � � ��ü � �B��3 L [ c�O^c
In responseto a taskannouncement,a nodemaymake a bid. Theschemabelow specifiesthatanodemakinga bid mustbeoneof thereceiversof thetaskannouncement,that it mustbeeligible forthetask,that it is interestedin performingthetask,andthatit is not thesender. As a resultof a nodemakinga bid, the setof taskannouncementsdoesnot change,but the bids associatedwith the taskannouncementareupdatedto includethenew bid.
26

� � ü�� ø�� 6 -·��&��� � �� ð �������3l�±- ð � ����� B3;� ø�� � � 3;� � � ��ü � �B�� � ��(��$����&���� B3 % ���� ��lA¯���M3����3;����� ��(�� � 3>�x� � ��ü � �B�� � �����$����&�£�����3;�x� � 3 % �^����� � 3 % ��. � + ����� . � � N % � W �d��� . � � � �(�8¥ ��� B3 % ��. � + �*��� . � � N % � W �d��� . � � � ���� � 3 % ��. � + ����� . � � N %Ò� �*��� ��� � �K���¤¥ ��� B3 % ��. � + ����� . � � N %Ò� �*��� ��� � �K�(�� �&�K���^���(�K�� ����M3 I � � 3 % � � ��ü O A � � � �����3��Af� � 3 % ������ ����� � ��ü � �B�� � ��(��$����&�£��9�A¯� � ��ü � �B�� � ��(��$������£���� �� 9 A ��� ����j[ I � � 3 L ��� 1�;� � 3�´�[ ��� B3 c�O^c
5.2.3 Making and Breaking Contracts
After receiving bids, the issuerof a taskannouncementawardsthecontractto thehighestratedbid.Thenodethatmakestheawardmustbethenodethatissuedthetaskannouncement,andthebid thatisselectedmustbein thesetof bidsassociatedwith thetaskannouncement.In orderto choosethebestbid, the
òµ� � � �a+functionis usedto provide a naturalnumberasanevaluationof a bid with respectto
a taskannouncement.Thusthebid with thehighestratingis selected.After makinganaward,thesetof all contractsis updatedto includea new contractfor theparticulartaskwith the issuerof the taskannouncementasmanagerandtheawardedbidderascontractor, wherethecontractoris instantiatedfrom theold nodeasa new agentwith theadditionaltaskof thecontract.Notice that thecontractorwaspreviously eithera neutralobjectin which caseit now becomesinstantiatedasa contractagent,or a contractagentandnow becomesinstantiatedasa new contractagent.Thetaskannouncementisnow satisfiedandremovedfrom thesystem,andthesetof bidsis updatedaccordingly.
� � ü�� � 2 � �^ 6 -·��&��� � �� ð ���$�3l�±-·��&��� � �� � +a������ � 3;� � � ��ü � �B�� � ��(��$����&���� B3;� ø�� ò'� � � �,+�� � � ��ü � �B�� � ��(��$����&� } ø'� } �$�34Af� � 3 % ������ ������� B3>� ��� 1�l� � 3s � � ø�� te � � ��� 1�z� � 3 k òµ� � � �a+Ì� � 3 ��� B3>ó òµ� � � �a+�� � 3 ����&��� � ��£� 9 A¬���&��� � p�£�µ´[d$ � ü������&��� � ��µ� � 3 % � � ��ü�$�3 I ð ��2 � +,���&� ��� B3 % ���� ��¤� � 3 % � � ��ü O^c���&��� � �� � +a�����£��9:A¯������� � p� � +a���&�£���[ ��� B3 % ���� �� c ´t[ ð ��2 � +,���&� ��� B3 % ���� ��¤� � 3 % � � ��ü c� � ��ü � �B�� � ��(��$����&�£��9�A¯� � ��ü � �B�� � ��(��$������£����[�� � 3 c��� �� 9 A ��� �����[ I � � 3 L ��� 1�>� � 3 O^c
27

Thefunctions$ � üd�����&��� � ��
andð ��2 � +,���&�
aredefinedasfollows.
$ � üd�����&��� � ��µ� � � ��ü |} -·��&��� � �� � +a���&� |} - ð � �� |} -·������ � p�s ��� � � ��ü � $õ�/-·��&��� � �� � +a���&� � l�/- ð � a� � ���Z�Ç-·��&��� � p� k$ � ü������&��� � ��µ��z$ A¯����� �µ� I $ % +� � .©� O 7F$V�A¯�7��� % � � ��ü�Af��7Ü��� % $ � � � +,���¤AC$ÿ7³��� % ���&��� � ��T��{A ð ��2 � +,���&����
ð ��2 � +a���&���Ç� �*� ��p� } ) � . } «���� ! ��� � +,���&�s +Ì� ) � . � �.0 ��Ç� �T� ���� � ����2 �&«���� ! ��� � +a���&� kð ��2 � +,���&���.< {+�AC�:��2� ����2 % +� � .©�;A¯�.0 % +� � .���´t[�+ c7F����2 % � W �d��� . � � � �(�lA¬�.< % � W �d��� . � � � ���;7F�:��2 %Ò� �*��� ��� � �K�(��A¯�.< %Ò� �*��� �*� � �K�(�Finally, a managercan terminatea contractwherethe contractis removed from the set of all
contracts. Whilst the contractorwill remove the task from its set of goalsthe managerwill not,sinceit may still be a contractorfor that taskor the monitor of the goal. The goal is thereforere-moved only from the goalsof the contractoragent. If this nodeis still an agent,therewill be nochangeto
���&��� � �� � +,���&�£�, but if thenodepreviously hadonly onegoal thenit will beremovedfrom���&��� � �� � +,���&�£�
sinceit is no longeranagent.
5.3 Application 3: SocialDependenceNetworks
As statedabove, dependencenetworks arestructuresthat form the basisof a computationalmodelof SocialPower Theory. They allow agentsto reasonabout,andunderstand,thecollective groupofagentsthatmakeup themulti-agentworld in which they operate.Thissectionintroducesdependencenetworksandexternaldescriptions,datastructuresusedto storeinformationaboutotheragents,basedon thework reportedby Sichmanet al. [49].
Externaldescriptionsstoreinformationaboutotheragents,andcomprisea setof goals,actions,resourcesandplansfor eachsuchagent.Thegoalsarethoseanagentwantsto achieve, theactionsarethoseanagentis ableto perform,theresourcesarethoseover whichanagenthascontrol,andtheplansarethoseavailableto theagent,but usingactionsandresourcesthatarenot necessarilyownedby theagent.This meansthat oneagentmay dependon anotherin termsof actionsor resourcesinorderto executeaplan.
First,webriefly describetheoriginalwork,andthenreformulateit in our framework. Thefollow-ing descriptionandreformulationis basedon work previously presentedin [17].
An agent�
is denotedby� +�
, andany suchagenthasa setof external descriptionsof all of theotheragentsin theworld, denotedby
� J � ������������ ï����� ¢ � J � ����� I � + � Owhere
� J � ����� I � + � O ������ [ ) ����� I � + � O�L � ����� I � + � O�L ò ����� I � + � O�L � ����� I � + � O^csuchthat) ����� I � + � O is thesetof goals� ����� I � + � O is thesetof actionsò ����� I � + � O is thesetof resources
28

� ����� I � + � O is thesetof plansthatagent
�believesagent
�has.
Noticethatanagenthasa modelof itself aswell asothers.Theauthorsadoptwhat they call thehypothesisof externaldescriptioncompatibility, which statesthatany two agentswill have preciselythesameexternaldescriptionof any otheragent.This is statedasfollows.
� J � ����� I � +� O A � J � ���! I � +� O 7 � J � ����� I � + � O A � J � ���! I � + � ONow,
� ����� I � + � L +#" O representsthe�����
of plansthat agent�
believes that agent�
hasin ordertoachieve thegoal
+#". Eachplanwithin this setis givenby
W$����� %:
W&����� % I � + � L +#" O ������ [�+#" L ò I W$����� % I � + � L +#" O^O�L�®�I W$����� % I � + � L +#" O^O^cwhere
ò I W$����� % O representsthesetof resourcesrequiredfor theplanand ®�I W$����� % O is a����v � ������ of
instantiatedactionsusedin this plan. Eachinstantiatedactionwithin a plan is definedby theactionitself andthesetof resourcesusedin theinstantiationof thisaction:
�!' I W ����� % I � + � L +#" O^O ������ [ �(' L ò ��) I W ����� % I � + � L +#" O^O^c5.3.1 Reformulating DependenceNetworks
Wecaneasilyreformulatethiswork in our framework. In thetheoryof socialdependencenetworksaplanis takento bea total orderon primitive actions.
« ñzð W�. � �ÁA;Aseq� �� � ��
Wetake a resourceto besomeentity — anobject,agentor autonomousagent.Thedefinitionof a planningagentfor this work is thena simplifiedversionof thegeneralmodel
givenearlier.
« ñzð W�. � �B� � �a+ � +,���&�� +a���&�W�. � �B�>��R�« ñ�ð W�. � �W�. � � � ��*+� � .�� ) � . } R�« ñ�ð W�. � �W�. � � ��� ���¤��R�« ñ�ð W�. � �+a � . ��� ���8��R ) � .W � ��� � ! �@W�. � � � ��*+� � .�� ) � . } R�« ñ�ð W�. � �+a � .��¤¥
domW�. � � � ��*+� � .ï I ran
W�. � � � ��*+� � . O A¨W�. � �B�+a � . ��� ���¥domW � ��� � ! �@W�. � � � ��*+� � .ï I ran
W�. � � � ��*+� � . O A¨W�. � � ��� ���
At this point we arenow in a position to specifyan external description. In order to do this,we mustrefinethis definition of a planningagentby including threeadditionalvariables.The first,�2·���� ����(�� � �^���� , representsthe set of resourcesan agent
�2·�E�. The second,
� �E�(�£�(�^��v, models
the set of resourcesneededto instantiatean action within a plan. The third, redundantvariable,���(�� � �^����� � W�. � � , is includedfor readabilityandrecordsthetotal setof resourcesrequiredby aplan.
29

Therearetwo predicatesin thelower partof theschema,which relatethevariablesin theschemaasfollows: strippingthesetof entitiesaway from eachinstantiatedactiongivestheoriginalplan;andtheresourcesof a planaretheunionof eachof thesetsof entitiesassociatedwith eachactionof theplan.
� J �K����� � . ñ �(���� � W:� � ��« ñzð W�. � �B� � �a+ � +,���&��2·���� ����(�� � ��(�(���R � ��� � � N� �E���£������v�B« ñzð W�. � � } I seqI � �� � �� U R � �&� � � N&O^O���(�� � ��(�(�� � W�. � �Y�B« ñ�ð W�. � � } R � �&� � � NW�. � �B��AC$ � W&����� I $ � W�����v�������� O�I ran
� �E�(�£�(�^��v Os W��E« ñ�ð W�. � � k �^���� � �^��(�� � W�. � ��WÁA ï I ranI $ � W&����v>�������� I � �E���£������v'W O^O^O
Now, sinceevery externaldescriptionof anagentis thesame,we canmodeltheformalismverysimply. An agent,
�, hasassociatedwith it anexternaldescription,which is preciselythemodelthat
every agent(including agent�
) hasof agent�
(accordingto thehypothesisof externaldescriptioncompatibility).
� J � ñ �(�� J �T ����;� � +,���&� |} � J �K����� � . ñ �(���� � W:� � ��
Presentingthemodelwithin theformal framework highlightssomeapparentdifficultieswith theoriginal formalism. First, the distinctionbetweena resourceandan agentis not clear. This is animportantdistinctionsincethe natureof a plan assumesthat all of the
�^���� � �^���� of an actionhavealreadybeenidentified,but the agentsthat could possiblyperformsomeactionhave not. Second,it is limiting in its representationof planssincesimultaneousactionscannotbe represented.In themulti-agentworld this is particularlylimiting becausenotwo agentscanthenperformthesameactionsimultaneously. Third, thenotionof ownership in theseexternaldescriptionsis notclear. Presumably,we shouldtake it to meanthat an agentownsanotherentity, if, for whatever the reason,that entitycanbe usedfor anyactionwithin its capabilitieswhenever theagentrequiresit. This is too strong,sinceit becomesimpossibleto representthenonotionof asharedresource,andclearly, amuchrichernotionof ownershipis requiredin general.Finally, thehypothesisofexternaldescriptioncompatibilityensuresthatany two agentswill agreeon themodelof themselvesandeachother. However, a trulyautonomousagentwill haveits own view of theworld aroundit, whichmaybearnorelationto anotheragent’s interpretationof its world, andcannever know theplansandgoalsof anotheragent;it mayonly infer themby evaluatingthebehaviour of theotheragent.
In responseto theseproblems,we usethe SMART framework describedearlier to ensurethatan autonomousagentwill have their own modelof the world and, in addition,we allow for planscontainingconcurrentactions.Theagenthierarchyallows us to bemuchcleareraboutthenatureofthesocialrelationships— suchasownership— whichwill dependonthetypesof entitiesandthegoaldependencenetworksthatexist betweenentitiesin theenvironment.Further, usingthehierarchy, wedonothave to arbitrarilydistinguishagentsfrom resources,but insteadconsideragentswith differentfunctionalities. In this way we canprovide a clearerandmoreintuitive representationof the socialstructuresin theworld sinceaplanningagentwouldhave to considermerelythesetof
� +,���&�£�thatare
requiredin aplan.
30

An agent� +�
will be ���+*p� for agivengoal+("
, according to a setof plans�-, "
if thereis aplanthatachievesthisgoalin thissetandevery actionappearingin thisplanbelongsto
� I � +� O :An agent
� +�will be .£�+*p� for agivengoal
+#", according to a setof plans
��, "if thereis aplanthatachievesthisgoalin thissetandevery resourceappearingin this planbelongsto
ò I � +� O :An agent
� + will be /��+*p� for agivengoal
+#", according to a setof plans
��, "if heis both ���0*�� and .£�+*p� for thisgoal.
Table1: Original Definitionof Action andResourceAutonomy
� �2143 I � +� L +#" L ��, " O ������ 5 +#"±� )¤I � +� O 5 W76 "/� �-, " s � ' � I W76 " O � ®�I W76 " O � ' � � I � +� O I98 % baO� �2143 I � + L +#" L ��, " O ������ 5 +#"±� )¤I � + O 5 W76 "/� �-, " s � ' � ò I W$6 " O � ' � ò I � + O I98 % i�O���2143 I � +� L +#" L ��, " O ������ � �2143 I � +� L +#" L �-, " O 7F�4�2143 I � +� L +#" L �-, " O I98 % qaO
Table2: Original Formalisationof Action andResourceAutonomy
5.3.2 Definitions of Autonomy
Usingexternaldescriptions,Sichmanet al. distinguishthreedistinctcategoriesof autonomyreferredto as ���0*�� , .£�+*p� and /��0*�� . According to thesedefinitionsagentsare autonomousif they have thenecessarycapabilitiesandresourcesto achieve agoalandsodo notneedthehelpof others.
The original definitionsandtheir formal representationsaspresentedby Sichmanat al. canbefound in Table1 andTable2, respectively. However, therearea numberof difficulties with them.First, the textual definitionsareslightly deceptive since
��, "is anabbreviation of
� ����� I � + , L +#" O andrepresentsa veryspecificsetof plansratherthanany setof plans. It representsthesetof plansthat� +�
believesthatagent� + ,
hasto achieve thegoal+ ,
. Further, sinceeveryplanin thissetnecessarilyachieves
+#", thetextual definition includesunnecessaryredundancy. All that is necessaryis that
��, "is non-empty.
The definition of the category /��0*�� is alsodeceptive. An agentis in this category if, within thesetof plansbeinganalysed,thereis oneplanthatcontainsactionswithin theagent’s capabilities,andanotherplanthatinvolvesresourcesall ownedby theagent.However, thereis nostipulationthattheseplansarethesame.In otherwords,anagentcanbe /��+*�� for a goal,andstill notbeableto achieve it,sincetheremaybeno specificplan that requiresjust thecapabilitiesand resourcesof thatagent.Inthis situation,all planswould theninvolve eithertheresourcesor thecapabilitiesof otheragents,soit makeslittle senseto saythat theagentis autonomouswith respectto this goalwhenit necessarilydependsonothers.
To addresstheseconcernswe provide slightly alteredtextual definitionsthatrelatemorestronglyto the original SDN formalisms. An agentis a-autonomousfor a given goal accordingto a setofplansof anotherto bring aboutthatgoal if thereis a planin this setthatachievesthegoal,andeveryactionin this planbelongsto thecapabilitiesof theagent.An agentis r-autonomousfor a givengoalaccordingto asetof plansof anotherto bringaboutthatgoalif thereis aplanin thissetthatachieves
31

thegoal,andevery resourcerequiredby theplan is ownedby theagent.An agentis s-autonomousfor agivengoalif it is botha-autonomousandr-autonomous.
In thefollowing schema,wedefinethesethreeclassesof autonomyusinganew relation, �(:�;�� <�=#<>/ .Thepredicate,�#:�;�� <�=#<>/¤I � L + L W&� O , holdspreciselywhenanagent,
�, hasgoal,
+, andthenon-empty
setof plansassociatedwith+
in orderto achieve it, isW&�
.Thusin theschemabelow, thefirst predicatestatesthatanagent,
�, is a-autonomouswith respect
to somesetof plans,W&�
, if andonly if thereis someagent,, with goal,
+, andplans,
W&�, to achieve
+suchthatsomeplan,
WinW&�
, containsactionsall in thecapabilitiesof�. Similarpredicatearespecified
for r-autonomousands-autonomous. Finally, the �(:�;�� <�=#<>/ predicateis specifiedasdescribedabove.
� � �T����$ N ò ��. � � � ��E�� J � ñ �(����+*p� L?.£�+*�� L@/��+*p� Lx�(:�;�� <�=(<>/ ��R I � +a���&� U¨) � . U R � . � � Os � � � +a���&� � +Ì� ) � . � W&�;�dR � . � � k
���+*p�nI � L + L W�� O �I 5 ;� � +,���&� k �(:�;�� <�=(<>/4I L + L W�� O^O 7I 5 W��1W&� kI ran
WZ¥ I � J �T ���� � O % � W �d��� . � � � �(� O^O 7.£�+*���I � L + L W&� O �I 5 ;� � +,���&� k �(:�;�� <�=(<>/4I L + L W�� O^O 7I 5 W��1W&� kI^I � J �T ���� � O % ���(�� � �^����� � W�. � �ÌWZ¥
I � J �T ��(� � O % �2·���� ����(�� � ��(�(� O^O 7/��+*p�nI � L + L W&� O ��1�+*���I � L + L W&� O 7 .£�+*���I � L + L W&� O 7
�(:�;�� <�=#<>/4I � L + L W&� O �+�� I � J �T ���� � O % +� � .©�>7I + L W&� O � I � J �T a�(� � O % W�. � � � ��*+� � .§7W&���AD[ c
Considerthedefinitionof �(:�;�� <�=(<>/ givenaboveandin particular, theexpression+�� I � J �T ��(� � O % +� � .�� .
This statesthatanagentcanonly reasonwith respectto a setof plansassociatedwith a currentgoal(i.e. one that it desires).However, it is not clearwhetherthis relation is with respectto goalstheagentdesires,or to its goal basein which casethe predicatewould read
+S� I � J �T a�(� � O % +� � . ��� ��� .Formalisingsuchnotionswithin theframework allows usto isolatesuchambiguities.
Accordingto thesedefinitions,if agentsareautonomous,thenthey maynotdepend, for resourcesor actions,on otheragents.Consequently, the fact thata pocket calculatorhastheresourcesandtheactionsnecessaryfor addingsomenumbersmakesit autonomous.This is in markedcontrastto ourown definitionwhich insiststhatanautonomousagentshouldbeableto generate its own goals.
5.3.3 DependenceRelations
Now wecanconsiderthetypesof dependenciesthatexist betweenagents.An agent,�
, a-dependsonanotheragent,
ø, for a givengoal,
+, accordingto somesetof plansof anotherto achieve
+, if it has+
asa goal,is not a-autonomousfor+, andat leastoneactionusedin this planis in
ø’s capabilities.
An agent,�
, r-dependson anotheragent,ø
, for a given goal,+, accordingto somesetof plansof
anotherto achieve+, if it has
+asagoal,is not r-autonomousfor
+, andat leastoneinstantiationused
32

in thisplanis ownedbyø
. An agent,�
, s-dependsonanotheragent,ø
, for agivengoal,+, if it either
r-dependsor a-dependsonø
.Thefirst predicatein theschemabelow statesthatgiventwo agents,
�and�, a goal,
+, anda set
of plansaccordingto which�
is not a-autonomouswith respectto+,�
a-dependson�
for+
withrespectto
W&�, if andonly if thereis someagent,
, with thegoal,
+, andplansto achieve
+,W&�
, suchthatno planin
W&�hasanactionin thecapabilitiesof agent
�.
ñ �ªWE���� a���� N ò ��. � � � ��E�� � �T����$ N ò ��. � � � ��E�R I � +a���&� U � +a����� Uj) � . U R � . � � Os � L � � � +,���&� � +�� ) � . � W&�;��R � . � ��e� �A � 7 I +�� I � J �T a�(� � O % +a � .�� O�k�#A0<��8I � L � L + L W�� O �� ���+*p��I � L + L W&� O 7I 5 l� � +a���&� k
�(:�;�� <�=#<>/�I L + L W&� O 7I ï [�WZ��W�� k ran
W c ¶I � J �T ���� � O % � W �d��� . � � � �(���AD[ c�O^O 7
.!AB<��{I � L � L + L W&� O �� .£�+*���I � L + L W&� O 7I 5 l� � +a���&� k
�(:�;�� <�=#<>/�I L + L W&� O 7I 5 W���W&� kI^I � J �T ��(�; O % ���(�� � ��(�(�� � W�. � �ÌW O ¶I � J �T ���� � O % �2·���� ��^���� � �^������AD[ c�O^O 7
/CAB<��{I � L � L + L W&� O ��(AB<��I � L � L + L W&� OED .!A0<��I � L � L + L W&� O
This reformulationalsohighlightssomedifficulties. It makeslittle senseto saythatI a-dependonanagentfor somegoal if theactionsthatachieve thatgoalarein my capabilities.Similarly, it makeslittle senseto saythat I r-dependon someagentfor someresourceif that resourceis alsoownedbymyself. (It is notmadeclearin thepaperbut it is possiblethatthework is assumingthatnotwo agentscanshareanactionor a resourceeventhoughthiswouldbeseverelylimiting.)
A moreintuitive definitionmight be
�(AB<��8I � L � L + L W&� O �I 5 l� � +a���&� k
�#:�;�� <�=#<>/4I L + L W&� O 7I 5 � � I ï [�WZ��W&� k ran
W c�k� � I � J �T ���� � O % � W �d��� . � � � �(�l7� �� I � J �T ���� � O % � W �d��� . � � � �(� O^O^OHowever, evenwhenanagentis capableof someactionof which I amnot capable,andwhich I
requirefor someplan,it still makeslittle senseto saythereis a dependency. It is moreappropriatetosaythat thereis a possibilityof thatagentbeingableto help in achieving a goal. Thereis no doubtthatsuchreasoningwill beusefulin certainsituations.
A betternotionof actualdependencywith respectto a goal,would be if everyplan in thesetofplansrequiredsomeagent’s assistance.Thustherewouldbea realdependency on thisagentin order
33

to achieve thegoal. (Notethatthis is adependency basedonthegoalsanagentmustachieve. It is notasolelyaction-basednotionof dependency.)
�(AB<��8I � L � L + L W&� O �I 5 l� � +a���&� k
�#:�;�� <�=#<>/4I L + L W&� O 7I s WZ��W&� k 5 � � ran
W k� � I � J �T ���� � O % � W �d��� . � � � �(�l7� �� I � J �T ���� � O % � W �d��� . � � � �(� O^O^OTheserelationsprovideanagentwith thestructuresthatcanbeusedto reasonaboutotherswith a
view to choosinganappropriatecourseof actionin thecontext of its dependencieson others’goals,plans,resources,and so on. We believe that social dependencenetworks constitutean importanttheoreticalbasisin studyingthenatureof thedependenciesagentsmayhaveoneachother, andin thissectionwehaveshown how wehavebeenableto isolateinconsistenciesandambiguitiesin thetheoryby reformulatingit within our framework.
6 Discussion
6.1 RelatedWork
Thereis a fair amountof relatedwork in relationto theeffort to provide specificationsof multi-agentsystems,andseveralapproachestoconceptual-level specificationhavebeenrecentlyproposed.Unlikethe general-purposeformal specificationlanguageapproachadoptedin this paper, DESIRE [5], forexample,offersacompositionaldevelopmentmethodwith well-structuredcompositionaldesignsthatis claimedcanbespecifiedatahigherlevel of conceptualisationandimplementedautomaticallyusingautomatedprototypegenerators.Essentially, DESIRE offersanexecutablespecificationframework forknowledge-basedsystems,thatcanbereadilyappliedto agent-basedsystems.
In [43], DESIRE is comparedwith the ConcurrentMETATEM programminglanguage,anotherrelatedeffort. In ConcurrentMETATEM, an agentis programmedby giving it an executablespeci-ficationof its behaviour, wheresucha specificationis expressedasa setof temporallogic formulaeof theform
W � ��� ¦ ��� � � ��� . Executionof theserulesproceedsby matchingthepasttime antecedentsof temporallogic rulesagainstfuturetimeconsequents;any rulesthatfire thenbecomecommitments,which theagentmustsubsequentlyattemptto satisfy. ConcurrentMETATEM canthusbeusedto en-codeadMARS-like interpreterasasetof ConcurrentMETATEM rules.Thesamepaperalsoprovidesanencodingof anabstractBDI interpreterusingDESIRE thoughhereit is lesseasyto representthecorebehaviour of asmallbut powerful agentin aconcisemanner.
Otherdevelopmentmethodsfor thespecificationof multi-agentsystemsthatcommitto aspecificagentarchitecturehavealsobeenproposed,suchas[34] basedontheBDI agentarchitecture,togetherwith object-orienteddesignmethods.A moredetailedcomparisonandevaluationof agentmodellingmethods,includingDESIRE, Z/SMART andothersis availablein [48, 47].
6.1.1 Conclusions
The lack of a commonunderstandingandstructurewithin which to pursueresearchin multi-agentsystemsis set to hamperthe further developmentof the field if efforts arenot madeto addressit.This paperhasdescribedone sucheffort, which aims to provide a framework that will allow thedevelopmentof diversemodels,theoriesandsystemsall relatedwithin a singleunifying whole. The
34

requirementsthatwe havesetout for formal frameworksin generalaresatisfiedby thework reportedhere,andtheadequacy of our formal framework is demonstratedby elaboratingandrefiningit sothatwecanpresentmodels,bothexisting,well-known implementedsystems,andnew, theoreticalmodels.In addition,we canconstructabstractgeneralmodelsof agentsanddefinetherelationshipsbetweenthemsothattheseconceptsmaybeappliedto modelsathigherlevelsof detail.
The incrementaldevelopmentof our work hasbeenfacilitatedin Z by usingschemainclusion.This canhelpensurethatat eachnew abstractionlevel, only thenecessarydetailsrequiredto definean agentsystemat that level are introducedand considered.In addition,new information canbeformally relatedto existing information from previous levels. SMART provides a whole rangeoflevelsof abstractionthatareformally related,enablingthemostsuitableabstractionlevel to bemorereadilyselectedfor thetaskat hand.
Thispaperdraws togethermany differentaspectsof ourwork, spanningarangeof levelsof detailandabstraction,andcoveringmany differentnotionsandsystems.If thefield of multi-agentsystemsis to progressin a rigorous,disciplinedand,perhapsmost importantly, accessibleway, theneffortssuchasthis, which seekto provide a commonunifying foundationfor a diversebody of work, arecritical.
References
[1] R. Aylett and M. Luck. Applying artificial intelligenceto virtual reality: Intelligent virtualenvironments.AppliedArtificial Intelligence, 14(1),to appear, 2000.
[2] J.P. Bowen. Formal SpecificationandDocumentationusingZ: A CaseStudyApproach. Inter-nationalThomsonComputerPress,1996.
[3] J.P. Bowen,S.Fett,andM. G. Hinchey, editors.ZUM’98: TheZ FormalSpecificationNotation,11th InternationalConferenceof Z Users, Lecture Notesin ComputerScience, volume1493.Springer-Verlag,1998.
[4] J.P. Bowen,M. G. Hinchey, andD. Till, editors.ZUM’97: TheZ FormalSpecificationNotation,10th InternationalConferenceof Z Users, Lecture Notesin ComputerScience, volume1212.Springer-Verlag,1997.
[5] F. Brazier, B. Dunin Keplicz, N. Jennings,andJ. Treur. Formal specificationof multi-agentsystems:A real-world case. In Proceedingsof the First International Conferenceon Multi-AgentSystems, pages25–32,MenloPark,1995.AAAI Press/ MIT Press.
[6] J.A. CampbellandM. d’Inverno. Knowledgeinterchangeprotocols.In Y. DemazeauandJ.-P.Muller, editors,DecentralizedAI: Proceedingsof the First EuropeanWorkshopon ModellingAutonomousAgentsin a Multi-AgentWorld, pages63–80.Elsevier, 1990.
[7] C. Castelfranchi. Social power. In Y. DemazeauandJ.-P. Muller, editors,Decentralized AI— Proceedingsof the First EuropeanWorkshopon Modelling AutonomousAgentsin a Multi-AgentWorld (MAAMAW-89), pages49–62.Elsevier SciencePublishersB.V.: Amsterdam,TheNetherlands,1990.
[8] C. Castelfranchi,M. Miceli, andA. Cesta.Dependencerelationsamongautonomousagents.InE. WernerandY. Demazeau,editors,DecentralizedAI 3 — Proceedingsof theThird European
35

WorkshoponModellingAutonomousAgentsin a Multi-AgentWorld (MAAMAW-91), pages215–231.Elsevier SciencePublishersB.V.: Amsterdam,TheNetherlands,1992.
[9] B. Chaib-draa.Industrialapplicationsof distributedai. Communicationsof theAMC, 38(11):49–53,1995.
[10] B. Chellas.Modal Logic: An Introduction. CambridgeUniversityPress:Cambridge,England,1980.
[11] B. Crabtree.What chancesoftwareagents? Knowledge EngineeringReview, 13(2):131–136,1998.
[12] R. Davis andR. G. Smith. Negotiationasa metaphorfor distributedproblemsolving. ArtificialIntelligence, 20(1):63–109,1983.
[13] M. d’Inverno. Agents,Agencyand Autonomy: A Formal ComputationalModel. PhD thesis,UniversityCollegeLondon,Universityof London,1998.
[14] M. d’Inverno,M. Fisher, A. Lomuscio,M. Luck, M. de Rijke, M. Ryan,andM. Wooldridge.Formalismsfor multi-agentsystems.Knowledge EngineeringReview, 12(3):315–321,1997.
[15] M. d’Inverno,D. Kinny, andM. Luck. Interactionprotocolsin agentis. In ICMAS’98,ThirdInternationalConferenceon Multi-Agent Systems, pages112–119,Paris, France,1998.IEEEComputerSociety.
[16] M. d’Inverno, D. Kinny, M. Luck, and M. Wooldridge. A formal specificationof dMARS.In Intelligent AgentsIV: Proceedingsof theFourth InternationalWorkshopon AgentTheories,ArchitecturesandLanguages, volume1365,pages155–176.Springer-Verlag,1998.
[17] M. d’InvernoandM. Luck. A formal view of socialdependencenetworks. In C. ZhangandD. Lukose,editors,DistributedArtificial IntelligenceArchitecture andModelling: Proceedingsof theFirstAustralian WorkshoponDistributedArtificial Intelligence, LectureNotesin ArtificialIntelligence, volume1087,pages115–129.SpringerVerlag,1996.
[18] M. d’InvernoandM. Luck. Engineeringagentspeak(l):A formal computationalmodel. LogicandComputation, 8(3):233–260,1998.
[19] M. d’Inverno, M. Priestley, and M. Luck. A formal framework for hypertext systems. IEEProceedings- Software EngineeringJournal, 144(3):175–184,June,1997.
[20] E. A. EmersonandJ. Y. Halpern. ‘Sometimes’and ‘not never’ revisited: on branchingtimeversuslineartime temporallogic. Journalof theACM, 33(1):151–178,1986.
[21] O. Etzioni,H. M. Levy, R. B. Segal,andC. A. Thekkath.Thesoftbotapproachto osinterfaces.IEEE Software, 12(4),1995.
[22] M. R. GeneserethandS.P. Ketchpel.Softwareagents.Communicationsof theACM, 37(7):48–53,1994.
[23] M. R. GeneserethandN. Nilsson.Logical Foundationsof Artificial Intelligence. MorganKauf-mann,1987.
36

[24] R. Goodwin. A formal specificationof agentproperties. Journal of Logic and Computation,5(6),1995.
[25] S.GrandandD. Cliff. Creatures:Entertainmentsoftwareagentswith artificial life. AutonomousAgentsandMulti-AgentSystems, 1(1):39–57,1998.
[26] R. H. Guttman,A. G. Moukas,andP. Maes. Agent-mediatedelectroniccommerce:a survey.Knowledge EngineeringReview, 13(2):147–159,1998.
[27] I. J.Hayes(Editor).SpecificationCaseStudies. PrenticeHall, HemelHempstead,secondedition,1993.
[28] C. A. R. Hoare. Communicatingsequentialprocesses.Communicationsof theACM, 21:666–677,1978.
[29] N. R. Jennings,P. Faratin,M. J.Johnson,P. O’Brien, andM. E. Wiegand.Agent-basedbusinessprocessmanagement.InternationalJournalof CooperativeInformationSystems, 5(2& 3):105–130,1996.
[30] N. R. Jennings,K. Sycara,andM. Wooldridge.A roadmapof agentresearchanddevelopment.AutonomousAgentsandMulti-AgentSystems, 1(1):7–38,1998.
[31] N. R. JenningsandT. Wittig. ARCHON: Theoryandpractice.In DistributedArtificial Intelli-gence:TheoryandPraxis, pages179–195.ECSC,EEC,EAEC,1992.
[32] W. L. JohnsonandB. Hayes-Roth,editors. Proceedingsof theFirst InternationalConferenceon AutonomousAgents. ACM Press,1997.
[33] C.B. Jones.SystematicSoftwareDevelopmentusingVDM (secondedition). PrenticeHall, 1990.
[34] D. Kinny, M. Georgeff, andA. Rao. A methodologyandmodellingtechniquefor systemsofBDI agents. In Y. Demazeauand J.-P. Muller, editors,AgentsBreakingAway: Proceedingsof theSeventhEuropeanWorkshopon Modelling AutonomousAgentsin a Multi-Agent World,LNAI 1038, pages56–71.Springer-Verlag,1996.
[35] D. KuokkaandL. Harada.Matchmakingfor informationagents.In Proceedingsof theFour-teenthInternational Joint Conferenceon Artificial Intelligence (IJCAI-95), pages672–679,Montreal,Quebec,Canada,August1995.
[36] Kevin Lano.TheB Language andMethod:A guideto PracticalFormalDevelopment. SpringerVerlag,1996.
[37] Y. Lashkari,M. Metral, and P. Maes. Collaborative interfaceagents. In Proceedingsof theTwelfthNationalConferenceon Artificial Intelligence, pages444–449,1994.
[38] M. Luck. Fromdefinitionto deployment:Whatnext for agent-basedsystems?TheKnowledgeEngineeringReview, pages119–124,1999.
[39] M. Luck andM. d’Inverno. A formal framework for agency andautonomy. In ProceedingsoftheFirst InternationalConferenceon Multi-AgentSystems, pages254–260.AAAI Press/ MITPress,1995.
37

[40] M. Luck andM. d’Inverno.A conceptualframework for agentdefinitionanddevelopment.TheComputerJournal, To Appear(2001).
[41] R. Milner. CommunicationandConcurrency. PrenticeHall, 1989.
[42] B. G. Milnes. A specificationof theSoararchitecturein Z. TechnicalReportCMU-CS-92-169,Schoolof ComputerScience,Carnegie Mellon University, 1992.
[43] M. Mulder, J. Treur, and M. Fisher. Agent modelling in concurrentMETATEM and DESIRE.In Intelligent AgentsIV: Proceedingsof theFourth InternationalWorkshopon AgentTheories,ArchitecturesandLanguages,LNAI 1365, pages193–207.Springer, 1998.
[44] H. VanDyke Parunak.Applicationsof distributedartificial intelligencein industry. In G. M. P.O’Hare and N. R. Jennings,editors,Foundationsof Distributed Artificial Intelligence, pages139–164.Wiley, 1996.
[45] H. VanDyke Parunak.Whatcanagentsdo in industry, andwhy? anoverview of industrially-orientedr&d at cec. In M. Klusch andG. Weiss,editors,Cooperative InformationAgentsII,Lecture Notesin Artificial Intelligence1435, pages1–18.Springer, 1998.
[46] A. S.Rao.AgentSpeak(L):BDI agentsspeakoutin alogicalcomputablelanguage.In W. VandeVeldeandJ. W. Perram,editors,AgentsBreakingAway: Proceedingsof theSeventhEuropeanWorkshoponModellingAutonomousAgentsin a Multi-AgentWorld, (LNAI Volume1038), pages42–55.Springer-Verlag:Heidelberg, Germany, 1996.
[47] O. ShehoryandA. Sturm. Evaluationof agent-basedsystemmodelingtechniques.TechnicalReportTR-ISE/IE-003-2000,Faculty of Industrial Engineeringand ManagementTechnion–IsraelInstituteof Technology, 2000.
[48] O. Shehoryand A. Sturm. Evaluationof modelingtechniquesfor agent-basedsystems. InProceedingsof theFifth InternationalConferenceonAutonomousAgents, pages624–631.ACMPress,2001.
[49] J. S. Sichman,Y. Demazeau,R. Conte,andC. Castelfranchi.A social reasoningmechanismbasedon dependencenetworks. In ECAI 94. 11th EuropeanConferenceon Artificial Intelli-gence, pages188–192.JohnWiley andSons,1994.
[50] J.S.SichmanandYvesDemazeau.Exploitingsocialreasoningto dealwith agency level incon-sistency. In Proceedingsof the First InternationalConferenceon Multi-Agent Systems, pages352–359,MenloPark,1995.AAAI Press/ MIT Press.
[51] R. G. Smith. Thecontractnetprotocol:High-level communicationandcontrol in a distributedproblemsolver. IEEE TransactionsonComputers, 29(12):1104–1113, 1980.
[52] R. G. SmithandR. Davis. Frameworks for cooperationin distributedproblemsolving. IEEETransactionson Systems,ManandCybernetics, 11(1):61–70,1981.
[53] M. Spivey. TheZ Notation(secondedition). PrenticeHall International:HemelHempstead,England,1992.
[54] C. Toomey and W. Mark. Satellite imagedisseminationvia software agents. IEEE Expert,10(5):44–51,1995.
38

[55] M. Weber. CombiningStatechartsandZ for thedesignof safety-criticalcontrolsystems.In M.-C. GaudelandJ.C. P. Woodcock,editors,FME’96: Industrial BenefitandAdvancesin FormalMethods, volume1051of Lecture Notesin ComputerScience, pages307–326.FormalMethodsEurope,Springer-Verlag,1996.
[56] W. Wen andF. Mizoguchi. Analysisandverificationof multi-agentinteractionprotocols. InProceedingsof IEEE APSEC’99, pages252–259,Takamatsu,Japan,1999.
[57] D. Wong,N. Paciorek,andD. Moore. Java-basedmobileagents.Communicationsof theACM,42(3):92–102,1999.
[58] M. WooldridgeandN. Jennings.Thecooperative problemsolvingaprocess.Journalof Logic &Computation, 9, 1999.
[59] M. J. Wooldridgeand N. R. Jennings. Intelligent agents:Theory and practice. KnowledgeEngineeringReview, 10(2),1995.
39