unit-vii: linear algebra-i - bookspar · unit-vii: linear algebra-i ... row matrix from the table 1...
TRANSCRIPT

Unit-VII: Linear Algebra-I
� Purpose of lession :
� To show what are the matrices , why they are useful, how they are classified as various types
and how they are solved.
� Introduction: Matrices is a powerful tool of modern Mathematics and its study is becoming
important day by day due to its wide applications in almost every branch of science and
especially in Physics and Engineering. Matrices are used by Sociologists in the study of
dominance within a group, by Demographers in the study of births and deaths, etc, by
Economist in the study of inter-industry economists, input-output tables and for various
practical business purposes, by statisticians in the study of ‘design of experiments and for
various practical business purposes, by statisticians in the study of ‘design of experiments and
multivariate analysis by Engineers in the study of ‘network analysis’ which is used in electrical
and communication engineering.
Application:
The following table shows the number of transistors and resistors purchased by a manufacturer
from suppliers A and B for the first week of January
A B
Transistor
Resistors
400
600
800
500
a) Write the data in the table as 2 x 2 matrix S1
b) b)Use scalar multiplication to find a matrix S2 whose entries are all 10 % large than the
corresponding entries of S1
c) Suppose that S2 is the supply matrix for the second week of January. Find S1 + S2 and explain
what its entries represent.
Solution: a) The supply table can be written as the following 2 x 2 matrix
400 800
1 600 500S
=
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 1
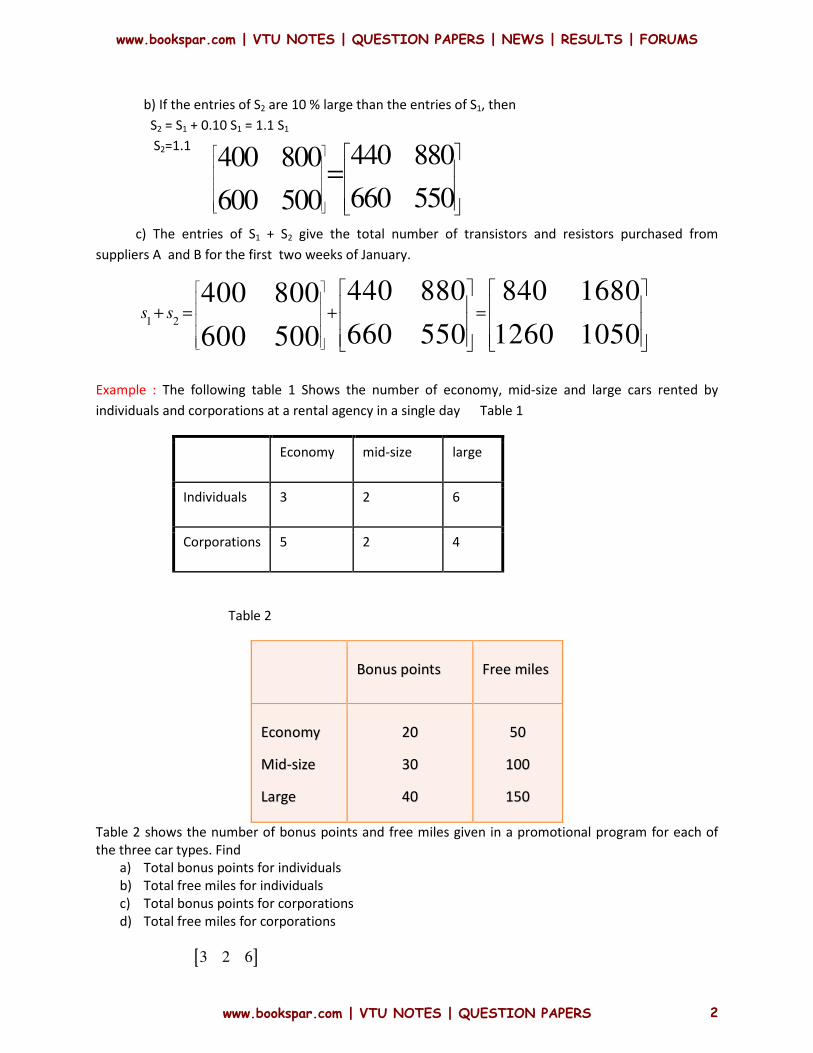
b) If the entries of S2 are 10 % large than the entries of S1, then
S2 = S1 + 0.10 S1 = 1.1 S1
S2=1.1
c) The entries of S1 + S2 give the total number of transistors and resistors purchased from
suppliers A and B for the first two weeks of January.
Example : The following table 1 Shows the number of economy, mid-size and large cars rented by
individuals and corporations at a rental agency in a single day Table 1
Economy mid-size large
Individuals 3 2 6
Corporations 5 2 4
Table 2
BBoonnuuss ppooiinnttss FFrreeee mmiilleess
EEccoonnoommyy
MMiidd--ssiizzee
LLaarrggee
2200
3300
4400
5500
110000
115500
Table 2 shows the number of bonus points and free miles given in a promotional program for each of
the three car types. Find
a) Total bonus points for individuals
b) Total free miles for individuals
c) Total bonus points for corporations
d) Total free miles for corporations
440 880400 800
660 550600 500
=
1 2
440 880 840 1680400 800
660 550 1260 1050600 500s s
+ = + =
[ ]3 2 6
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 2

The 1 x 3
row matrix from the Table 1 –
by Individuals
• The 3 x 1 column matrix
From table 2 represents the bonus points given for each economy, mid
rented.
The product of these two matrices is a 1 x 1 matrix whose entry is the sum of the products of the
corresponding entries
The product of above two matrices, gives the total number of bonus points given to individuals on the
rental of the 11 cars.
Traffic control in the future:
The above picture shows the intersections of four one way streets. 400 cars per hour want to enter
intersection P from the north on First Avenue while 300 cars per hour want to
intersection Q on Elm Street. The letters w, x, y, and z represent the number of cars per hour passing
the four points between these four intersections, as shown in picture.
A) Find values for w, x, y and z that would realize this desired
[3 2 6 30 360
Eco Mid Lar
3 2 6
5 2 4
Bonus Pts Free Miles
X
– Represents the number of economy, medium size and large rented
The 3 x 1 column matrix
From table 2 represents the bonus points given for each economy, mid-size and large car that is
The product of these two matrices is a 1 x 1 matrix whose entry is the sum of the products of the
The product of above two matrices, gives the total number of bonus points given to individuals on the
The above picture shows the intersections of four one way streets. 400 cars per hour want to enter
intersection P from the north on First Avenue while 300 cars per hour want to
intersection Q on Elm Street. The letters w, x, y, and z represent the number of cars per hour passing
the four points between these four intersections, as shown in picture.
A) Find values for w, x, y and z that would realize this desired traffic flow.
20
30
40
] [ ]20
3 2 6 30 360
40
=
Bonus Pts Free Miles
Eco
Mid
Lar
20 50360 1250
30 100320 1050
40 150
X
=
Represents the number of economy, medium size and large rented
size and large car that is
The product of these two matrices is a 1 x 1 matrix whose entry is the sum of the products of the
The product of above two matrices, gives the total number of bonus points given to individuals on the
The above picture shows the intersections of four one way streets. 400 cars per hour want to enter
intersection P from the north on First Avenue while 300 cars per hour want to head east from
intersection Q on Elm Street. The letters w, x, y, and z represent the number of cars per hour passing
360 1250
320 1050
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 3

B) If construction on Oak Street limits z to 300 cars per hour, then how many cars per hour would have
to pass w, x, and y.
Solution: The solution to the problem is based on the fact that the number of cars entering an
intersection per hour must equal the number leaving that intersection per hour, if the traffic is to keep
flowing
Since 900 cars ( 400 + 500) enter intersection P, 900 must leave, x + w = 900. Writing a similar equation
for each intersection yields the system of equation
W + x = 900
W + y = 1000
X + z = 850
y + z = 950
w + x = 900 w = 50 + z
x + z = 850 x = 850 - z
y + z = 950 y = 950 – z
The system is a dependent system does not have a unique solution.(z is non negative integer)
b)If z is limited to 300 because of construction, then the solution is ( 350,550,650,300) To keep traffic
flowing when z = 300, the system must route 350 cars past w, 550 past x and 650
9501100
8501010
10000101
9000011
−≈
00000
1000110
8501010
9000011
B) If construction on Oak Street limits z to 300 cars per hour, then how many cars per hour would have
Solution: The solution to the problem is based on the fact that the number of cars entering an
hour must equal the number leaving that intersection per hour, if the traffic is to keep
Since 900 cars ( 400 + 500) enter intersection P, 900 must leave, x + w = 900. Writing a similar equation
for each intersection yields the system of equations.
R4=R4 – R2 R23
nt system does not have a unique solution.(z is non negative integer)
b)If z is limited to 300 because of construction, then the solution is ( 350,550,650,300) To keep traffic
flowing when z = 300, the system must route 350 cars past w, 550 past x and 650 past y.
≈
00000
9501100
8501010
9000011
−
−≈
1000110
8501010
1000110
9000011
−≈
000
010
110
011
B) If construction on Oak Street limits z to 300 cars per hour, then how many cars per hour would have
Solution: The solution to the problem is based on the fact that the number of cars entering an
hour must equal the number leaving that intersection per hour, if the traffic is to keep
Since 900 cars ( 400 + 500) enter intersection P, 900 must leave, x + w = 900. Writing a similar equation
R23
nt system does not have a unique solution.(z is non negative integer)
b)If z is limited to 300 because of construction, then the solution is ( 350,550,650,300) To keep traffic
past y.
000
85010
10001
90000
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 4

Definition Matrices and Types of Matrices:
Twenty six female students and twenty-four male students responded to a survey on income in a college
algebra class. Among the female students , 5 classified themselves as low-income, 10 as middle-income,
and 11 as high-income. Among the male students, 9 were low-income, 2 were middle-income, and 13
were high-income. Each student is classified in two ways, according to gender and income. This
information can be written in a matrix:
L M H
Female
Male
Square matrix: In this matrix we can see the class of makeup according to gender and income. A matrix
provides a convenient way to organize a two way classification of data.
A matrix is a rectangular array of real numbers. The rows of a matrix run horizontally, and the
columns run vertically.
A matrix with m rows and n columns has size m x n (read “ m by n”). The number of rows is
always given first. For example, the matrix used to classify the students is a 2 x 3 matrix
When m = n i. e the number of rows is the same as the number of columns the array is called a square
matrix. The others are called rectangular matrix.
Row-matrix: In a matrix if there is only one row it is called a row matrix
Column matrix: In a matrix if there is only one column it is called a column matrix
Null matrix : In a matrix, if all the elements of matrix are zero, it is called null matrix and is denoted by o
Equal Matrix: Two matrices are said to be equal if
i) They are of the same type i.e they have same number of rows and columns
ii) The elements in the corresponding positions of the two matrices are equal.
Location of an element: To locate any particular element of a matrix the elements are usually denoted
by a letter followed by two suffixes which respectively specify the row and the column in which it
appears. Thus the element occurring in pth
row and qth
column will be written as apq.
Note: The matrices are generally denoted by capital letters.
Diagonal Elements of a Matrix: An element aij of a square matrix is said to be a diagonal element if i = j.
1329
11105
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 5

Scalar Multiple of a matrix: If k is a number and A is a matrix, then kA is defined as the matrix each
element of which is k times the corresponding element of A.
Triangular Matrix: if every element above (or below ) the diagonal is zero, the matrix is called a
triangular matrix
Example:
Transposed Matrix: The matrix of order n x m obtained by interchanging the rows and columns of a
matrix A of order m x n is called the transpose matrix of A or transpose of the matrix and is denoted by
A’ or At.
Representation of Points: A point is represented in two dimensions by its coordinates. These two values
are specified as the elements of a 1 x 2 matrix i.e.
In three-dimensions a 1 x 3 matrix
Row matrix or column matrix like are frequently called position vectors.
Elementary Transformations:
An elementary transformation, which is also known as E-transformation, is an operation of any one of
the following types.
i) Interchange of two rows (columns)
ii) The multiplication of the elements of rows (columns) by a non-zero number.
iii) The addition to the elements of a row (column), the corresponding elements of a row ( column)
multiplied by any number
An elementary transformation is said to be row-transformation or column transformation according
as it applies to rows or columns.
ngular upper tria
600
530
421
ngularlower tria
654
032
001
[ ]12y
xor ,
xyx
[ ]
13z
y
x
or used is
x
zyx
[ ]
y
xor yx
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 6

Symbols to be used for elementary transformation:
i) Rij for the interchange of ith
and jth
rows
ii) Ri(k) for the multiplication of ith
row by k ≠ 0
iii) Rij(k) for the addition to the ith
row, the products of the jth
row by k. Similarly we use the symbols
Cij, Ci(k), Cij(k) for the corresponding column operations.
Equivalent Matrices:
Two matrices A and B are said to be equivalent if one can be obtained from the other by a
sequence of elementary transformations. Two equivalent matrices have the same order. The
symbol ~ is used for equivalence.
Minor : Let A be a matrix square or rectangular, from it delete all rows leaving a certain t-rows
and all columns leaving a certain t-column. Now if t > 1 then the elements that are left,
constitute a square matrix of order t and the determinant of this matrix is called a minor of A of
order t
Rank of a Matrix:
Definition: A matrix is said to be rank r when
I ) It has at least one non-zero minor of order r and
ii) Every minor of order higher than r vanishes.
Briefly, the rank of a matrix is the largest order of any non-vanishing minor of the matrix
For example:1) , ρ(A) = 1
2) , ρ(A) = 1
Note : i) If a matrix has a non-zero minor or order r, its rank is ≥ r
ii) If all minors of a matrix of order of r+1 are zero, its rank is ≤ r
Example:
=642
321A
=
12963
8642
4321
A
3(A) 02A
220
432
321
=≠=
= ρA
3)( 0
100
010
001
0000
1000
0100
0010
=≠=
AA ρ
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 7

Example:. Find the rank of the matrix
Example:. Reduce the matrix to a unit matrix by only elementary
row transformations
Solution:
Example:. Find the rank of the matrix
2)(
0000
0000
1310
0211
12
0000
0000
0211
1310
244
;2
R-3
R3
R
0211
0211
0211
1310
operate
0211
0633
0211
1310
1
2R3
R3
R;1
R2
R2
R
0211
2013
1101
1310
=−−
−
≈
−
−−
≈−==
−
−
−
−−
≈
−
−
−
−−
≈+=+=
−
−−
=
A
RRRR
ρ
13165
452
562
=A
3(A)
100
010
001
~2
411
100
010
041
~
32233
11100
110
341
~2
233
120
110
341
~
12
33562
110
341
~ 13
R
341
110
562
~
12
33:
122R
13165
452
562
=−+=
−=−=−−−=
−−
−−
−=−−−−
−=−==
ρRRR
RRRRRRRRR
RRR
RRRRRA
−=−=−=
==
00
01~
00
000
001
~13
00
000
100
~
13
33;
12
2200
200
100
~3
222
c
60
240
120
~
2
c-3
c3
c
960
640
320
00
33
Ic
RRRRRRcc
A
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 8
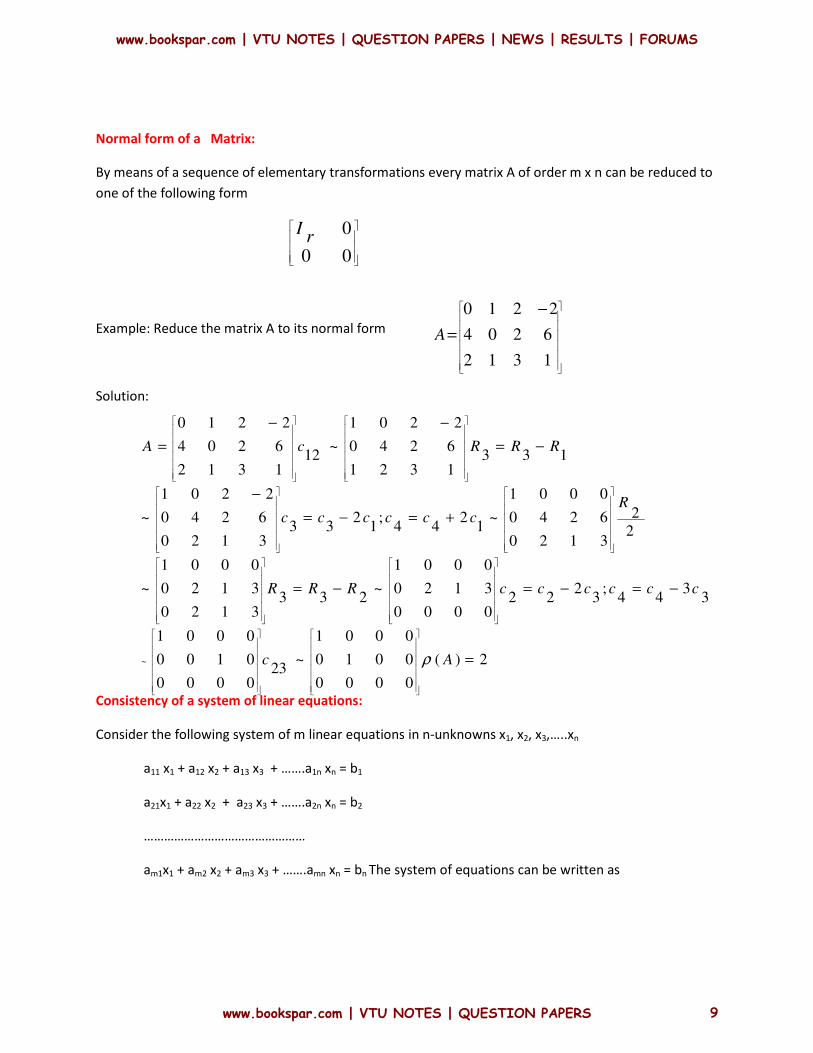
Normal form of a Matrix:
By means of a sequence of elementary transformations every matrix A of order m x n can be reduced to
one of the following form
Example: Reduce the matrix A to its normal form
Solution:
Consistency of a system of linear equations:
Consider the following system of m linear equations in n-unknowns x1, x2, x3,…..xn
a11 x1 + a12 x2 + a13 x3 + …….a1n xn = b1
a21x1 + a22 x2 + a23 x3 + …….a2n xn = b2
…………………………………………
am1x1 + am2 x2 + am3 x3 + …….amn xn = bn The system of equations can be written as
00
0rI
−
=
1312
6204
2210
A
2)(
0000
0010
0001
~23
0000
0100
0001
33
44;
32
220000
3120
0001
~233
3120
3120
0001
~
2
2
3120
6240
0001
~1
244
;1
233
3120
6240
2201
~
1331321
6240
2201
~12
1312
6204
2210
~ =
−=−=−=
+=−=
−
−=
−−
=
Ac
ccccccRRR
Rcccccc
RRRcA
ρ
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 9

Conditions for Consistency:
� Here the system of equations AX = B is called the non homogeneous set of equations and the
system of equations A X = 0 is called the homogeneous set of equations.
� A system of linear equations is said to be consistent if it possesses a solution and inconsistent (
not consistent) if it does not possess a solution
� A homogeneous system always possesses at least one solution (namely the trivial solution ), a
homogeneous system is always consistent. But a non–homogeneous system may or may not be
consistent.
� The equation A X = B is consistent i.e. has a solution (unique or infinite ) iff the matrices A and D
are of the same rank i.e. ρ(A) = ρ(D).
� i) If ρ(A) = ρ(D)= n, the number of unknowns, then only the given system of equations will have a
unique solution
� ii) If ρ(A) = ρ(D) < n, then the given system will have infinite solutions.
� iii) If ρ(A) ≠ ρ(D) then the given system of equations will be inconsistent or will not have any
solution.
Example: Test the consistency of the following equations
4x – 2y + 6z = 8
x + y – 3z = -1
15x – 3y + 9z = 21
Solution:
..21
..........33
..3231
22..
1221
11..
1211
..3
2
1
B
nx
..3
x2
x1
x
X
21
33231
21221
1,,..
1211
....
..........
....
,,..
=
===
nbmnam
am
a
bn
aaa
bn
aaa
bn
aaa
D
nb
b
b
b
mnam
am
a
naaa
naaa
naaa
A
33
3,
12R
219315
1311
8624
:
21
1-
8
B ,
z
y
x
X ,
9315
311
624
RRDAD
A
=
−
−−
−
==
==
−
−
−
=
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 10
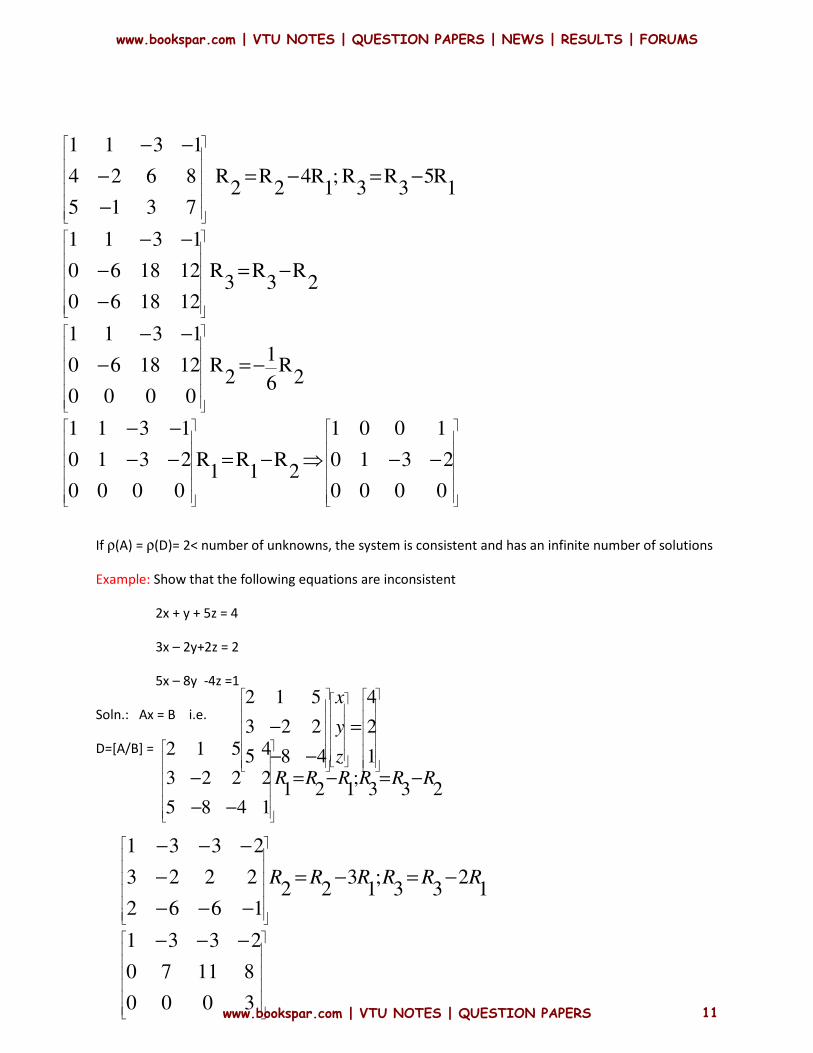
If ρ(A) = ρ(D)= 2< number of unknowns, the system is consistent and has an infinite number of solutions
Example: Show that the following equations are inconsistent
2x + y + 5z = 4
3x – 2y+2z = 2
5x – 8y -4z =1
Soln.: Ax = B i.e.
D=[A/B] =
−−⇒−=−−
−−
−=−
−−
−=
−
−
−−
−=−=
−
−
−−
0000
2310
1001
2R
1R
1R
0000
2310
1311
2
R6
12
R
0000
121860
1311
2
R3
R3
R
121860
121860
1311
1R5
3R
3R ;
1R4
2R
2R
7315
8624
1311
=
−−
−
1
2
4
485
223
512
z
y
x
233;
1211485
2223
4512
RRRRRR −=−=
−−
−
−−−
−=−=
−−−
−
−−−
3000
81170
2331
12
33;
13
221662
2223
2331
RRRRRR
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 11
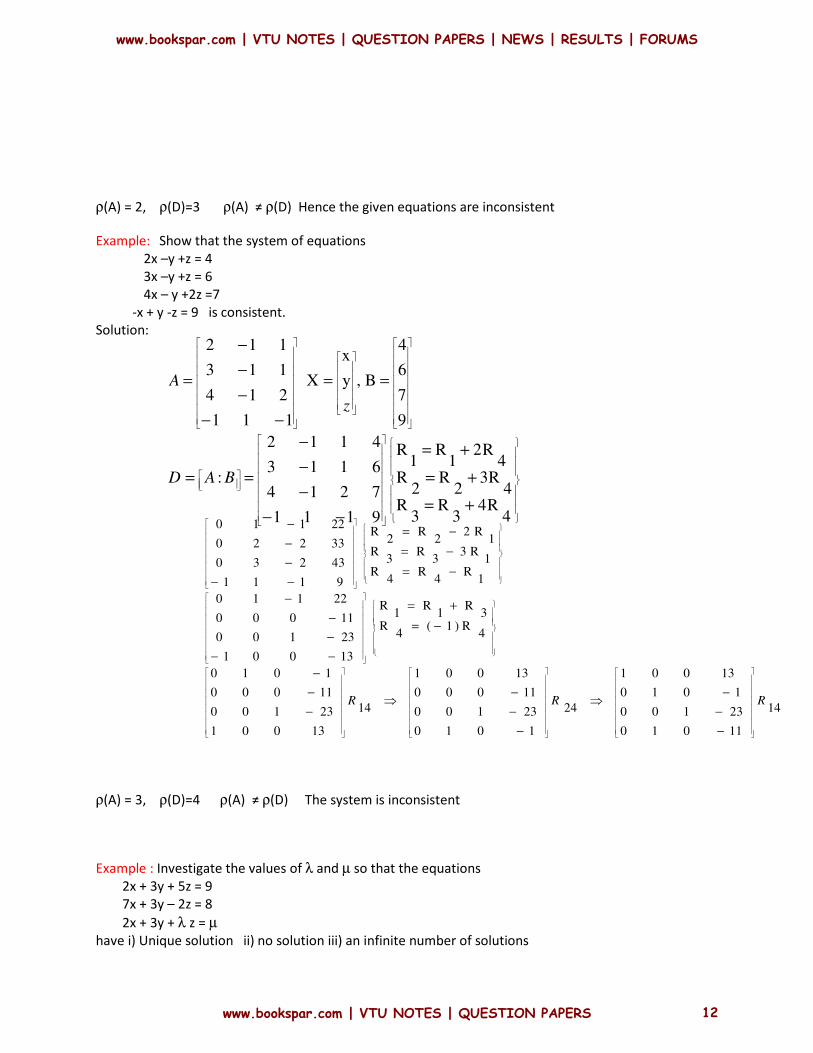
ρ(A) = 2, ρ(D)=3 ρ(A) ≠ ρ(D) Hence the given equations are inconsistent
Example: Show that the system of equations
2x –y +z = 4
3x –y +z = 6
4x – y +2z =7
-x + y -z = 9 is consistent.
Solution:
ρ(A) = 3, ρ(D)=4 ρ(A) ≠ ρ(D) The system is inconsistent
Example : Investigate the values of λ and µ so that the equations
2x + 3y + 5z = 9
7x + 3y – 2z = 8
2x + 3y + λ z = µ
have i) Unique solution ii) no solution iii) an infinite number of solutions
+=
+=
+=
−−
−
−
−
==
==
−−
−
−
−
=
4R4
3R
3R
4R3
2R
2R
4R2
1R
1R
9111
7214
6113
4112
:
9
7
6
4
B ,y
x
X
111
214
113
112
BAD
z
A
14
11010
23100
1010
13001
24
1010
23100
11000
13001
14
13001
23100
11000
1010
4R)1(
4R
3R
1R
1R
13001
23100
11000
22110
1R
4R
4R
1R3
3R
3R
1R2
2R
2R
9111
43230
33220
22110
RRR
−
−
−⇒
−
−
−⇒
−
−
−
−=
+=
−−
−
−
−
−=
−=
−=
−−
−
−
−
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 12

Solution:
(1)
i) If equation (1) has a unique solution then the determinant of the coefficient matrix A≠0
i.e the given system of equations will have a unique solution if λ≠ 5 whatever may the value of µ.
If λ = 5 and µ≠ 9, then ρ(A) = 2, ρ(D) = 3 ρ(A) ≠ ρ(D) Hence the given system of equations has no
solution
c) If in the augmented D, λ = 5 and µ= 9 then
It is clear that ρ(A) = ρ(D) = 2 (< 3 the number of unknowns ) Therefore their exist infinite number of
solutions to the given set of equations
=−
µλ
8
9
32
237
532
z
y
x
5 .0A -515
32
237
532
≠≠∴=−=
λλ
λ
A
−=−==
9-5-00
82-37
9532
133R
32
8237
9532
/
µλ
µλ
RRBAD
−=
0000
8237
9582
D
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 13

Basically, there are TWO types of methods available, viz, Direct methods and Indirect methods or
Iterative methods.
Direct Method:
i) Cramer’s rule
ii) Gaussian Elimination
iii) Gauss-Jordan method
iv) Choleskey Method
Indirect Method:
i) Jacobi Method
ii) Gauss seidal method
iii) Successive Over-Relaxation Technique
Gauss Elimination method:
Gauss Elimination method applied to three linear equations. First we explain this method applied to a
particular systems of order three given by
a11 x1 + a12 x2 + a13 x3 = b1
a21x1 + a22 x2 + a23 x3 = b2 (1)
a31x1 + a32 x2 + a33 x3 = b3
The augmented matrix of the above system
To eliminate x1 from the second equation multiplying the first equation by and add it to
the second equation.
Similarly to eliminate x1 from the third equation multiply the first equation by and add it to the
third equation . Thus we get the matrix.
~
3333231
2232221
1131211
baaa
baaa
baaa
11
21a
a−
11
31a
a−
−−−−
−−−−
111
31313
11
313312
11
313211
11
3131
111
21213
11
212312
11
212211
11
2121
1131211
ba
aba
a
aaa
a
aaa
a
aa
ba
aba
a
aaa
a
aaa
a
aa
baaa
′′′
′′′
333320
223220
1131211
baa
baa
baaa
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 14

Where , are called the multipliers for the first stage of elimination. The first
equation is called the pivotal equation and is called the first pivot is the new pivot
and the multiplier is
i.e. multiply the second row by and add it to the third row.
~
~
The values of x1, x2 and x3 can be obtained by the substitution
Remark: This method fails if one of the pivots say , or
Vanishes. We can modify by rearranging the rows so that the pivot is non-zero.
Example: Solve by Gauss elimination Method
11
21a
a−
11
31a
a−
11a
≠0
11a
22a′
22
32
a
a
′
′−
22
32
a
a
′
′−
′′
′−′′
′
′−′′
′
′−′
′′′
222
32323
22
323322
22
3232
0
223220
1131211
ba
aba
a
aaa
a
aa
baa
baaa
′′′′
′′′
33300
223220
1131211
ba
baa
baaa
33
33
3333
2323222
1313212111
equation xlast theFrom
a
b
bxa
bxaxa
bxaxaxa
′′
′′=
′′=′′
′=′+′
=++
11a
22a′
33 a ′′
1694
18323
102
=++
=++
=++
zyx
zyx
zyx
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 15

Solution: The augmented matrix is
Eliminating x from second and third equation
The augmented matrix is
~
~
Eliminating y from the third equation R3=R3-7R2
z = 5, y = -9, x = 7
112
17
2
70
32
3
2
10
10112
12
133
R;12
322
R
16941
18323
10112
RRRR −=−=
102
1161
2
191
2
142
2
11
102
3181
2
331
2
322
2
33
10112
−−−−
−−−−
10200
32
3
2
10
10112
−−
102
32
32
1
102
=−
=+
=++
z
zy
zyx
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 16

Gauss-Jordan Method:
Instead of eliminating x2 only in the third equation, we could have eliminated it from the first
equation also, so that at the end of the second stage, the augmented matrix becomes.
Gauss-Jordan Method: consider
a11 x1 + a12 x2 + a13 x3 = b1
a21x1 + a22 x2 + a23 x3 = b2 (1)
a31x1 + a32 x2 + a33 x3 = b3
The augmented matrix of the above system
(2)
This modification of Gaussian elimination is called the Gauss-Jordan method
Example: Solve by Gauss-Jordan method
Solution: The augmented matrix is
1694
18323
102
=++
=++
=++
zyx
zyx
zyx
3333231
2232221
1131211
baaa
baaa
baaa
′′
′−′′
′
′−′′
′
′−′
′′′
222
32323
22
323322
22
3232
0
223220
1131211
ba
aba
a
aaa
a
aa
baa
baaa
′′
′′′
′′′
33300
223220
1130
11
ba
baa
baa
12
133
R;12
322
R
16941
18323
10112
RRRR −=−=
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 17

Eliminating x from second and third equation
2x -2z = 4
(½) y +(3/2) z = 3
-2z = -10 z = 5, y = -9, x = 7
Example :Solve the following system of linear equations
x + 2y + z = 8
2x + 3y + 4z = 20
4x + 3y + 2z = 16 Using Gauss-Jordan method.
Solution: Let the given system of equations be written in the matrix form AX= B where
The augmented matrix is
12
13
R3
R;12
32
R2
R i.e
102
1161
2
191
2
142
2
11
102
3181
2
331
2
322
2
33
10112
RR −=−=
−−−−
−−−−
27
33R;
22
11R
112
17
2
70
32
3
2
10
10112
RRRR −=−=
10200
32
3
2
10
4202
−−
−
===
16
20
8
B and
z
y
x
X,
234
432
121
A
16
20
8
234
432
121
:
=BA
16
20
8
234
432
121
:
=BA 1
43
R3
R 1
2R-2
R2
R R−==
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 18

We get the following system of equations X = 1, y = 2 and 12z = 36
Then required solution is x =1 , y = 2, z =3
−−
−
16-
4
8
250
210
1212
53
R3
R R−=
36-
4
8
1200
210
121
−
− 36/1
2312/1
1R RRR ++
36-
2-
5
1200
010
021
−
−2
21
R1
R R+=
36-
2-
1
1200
010
001
−
−
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 19

Unit-VIII: Linear Algebra-II
Linear Transformations: Definition
A transformation ( or function or mapping):
A transformation T from Rn to R
m is a rule that assigns to each vector x in R
The set Rn is called the domain of T, and R
that the domain of T in Rn and the co
For x in Rn, the vector T(x) in R
m is called the image of x (under the action of T).
The set of all images T(x) is called the range of T.
For example: AX = b and Au = o
Say that multiplication by A transforms X into b and Similarly multiplication by A transforms u into the o
(zero) vector.
Matrix Transformation : T:Rn R
matrix, For simplicity, we sometimes denote such a matrix transformation by x Ax.
Example: Let
And define a transformation T:R2
Find T(u), the image of u under the transformation T.
=−
8
5
1
1
1
1
1502
3134
−=
−
−
= ,1
2u,
71
53
31
A
Linear Transformations: Definition:
nsformation ( or function or mapping):
is a rule that assigns to each vector x in Rn a vector T(x) in R
is called the domain of T, and Rm
is called the co-domain of T. The notation T:R
and the co-domain is Rm
.
is called the image of x (under the action of T).
The set of all images T(x) is called the range of T.
and
Say that multiplication by A transforms X into b and Similarly multiplication by A transforms u into the o
Rm
for each x in Rn, T(x) is computed as A(x), where A is an m x n
matrix, For simplicity, we sometimes denote such a matrix transformation by x Ax.
R3 by T(x) = Ax so that T(x)= A(x)=
the transformation T.
=−
0
0
3
1-
4
1
1502
3134
−
=
5
2
3
b ,
−
−
71
53
31
a vector T(x) in Rm
.
domain of T. The notation T:Rn R
m indicates
Say that multiplication by A transforms X into b and Similarly multiplication by A transforms u into the o
, T(x) is computed as A(x), where A is an m x n
matrix, For simplicity, we sometimes denote such a matrix transformation by x Ax.
by T(x) = Ax so that T(x)= A(x)=
+−
+
−
=
27
1
25
13
23
1
2
1
xx
xx
xx
x
x
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 20

Definition: A transformation ( or mapping ) T is linear if
i) T(u + v) = T(u) + T(v) for all u, in the domain of T
ii) T(cu)=c T(u) for all u and all scalars c.
Characteristic Equation of a Matrix :
If A = (aij) is any square matrix of order n and λ be any variable, then the matrix [ A- λI] is called the
characteristic matrix of A. The determinant of this matrix i.e. Is called the characteristic function.
The equation =0 is the characteristic equation of A and of degree n. The roots of the equation
= 0 are called the characteristics or Eigen values of A.
Example: Determine the characteristic roots of
Solution: The characteristic equation is =0
iE
By synthetic division method
1) -1 7 -11 5
-1 6 -5
-1 6 5 0
-λ2+6 λ-5 = 0 (-λ+1)(λ-5)=0
λ1= 1, λ2 =1 λ3 = 5 are the require roots or Eigen values
Example: Find the eigen values and the eigenvector of the matrix
Solution: The characteristic equation of A is = 0
i.e expanding we get
The roots of this equation are, λ = 6 λ = 1 which are the eigen values of A.
To find the eigen vectors, consider the matrix equation is
−
=−
−
−
==
9
1
5
1
2
71
53
31
)( AuuT
0511273 =+−+− λλλ
=
221
131
122
A
IA λ−
0
221
131
122
=
−
−
−
λ
λ
λ
21
45=A
021
45=
−
−
λ
λ
IA λ−
0672 =+− λλ
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 21

This gives 2 homogeneous linear equations
(5-λ) x1 +4x2 = 0
x1+(2-λ)x2 =0
i) For λ = 6 above equations becomes
-x1 + 4x2 = 0
x1- 4x2 =0 Both represent the same equation x1-4x2 =0
giving the eigenvector
ii) Again for λ = 1,
4x1 + 4x2 = 0
x1 + x2 = 0 Both represent the same x1 + x2 = 0
giving the eigenvector
Example: Find the eigen value and the eigen vectors of the matrix
Solution:
The characteristic equation of the matrix A is
12
11
−=∴
xx
=−
−
==−
0
0
2x
1x
21
45.
2x
1x
X where0
λ
λ
λ
ei
XIA
12
41
xx=∴
=1
4
1X
−=
1
1
2X
−
−−
−
342
476
268
−
−−
−
=
342
476
268
ALet
0=− IA λ
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 22
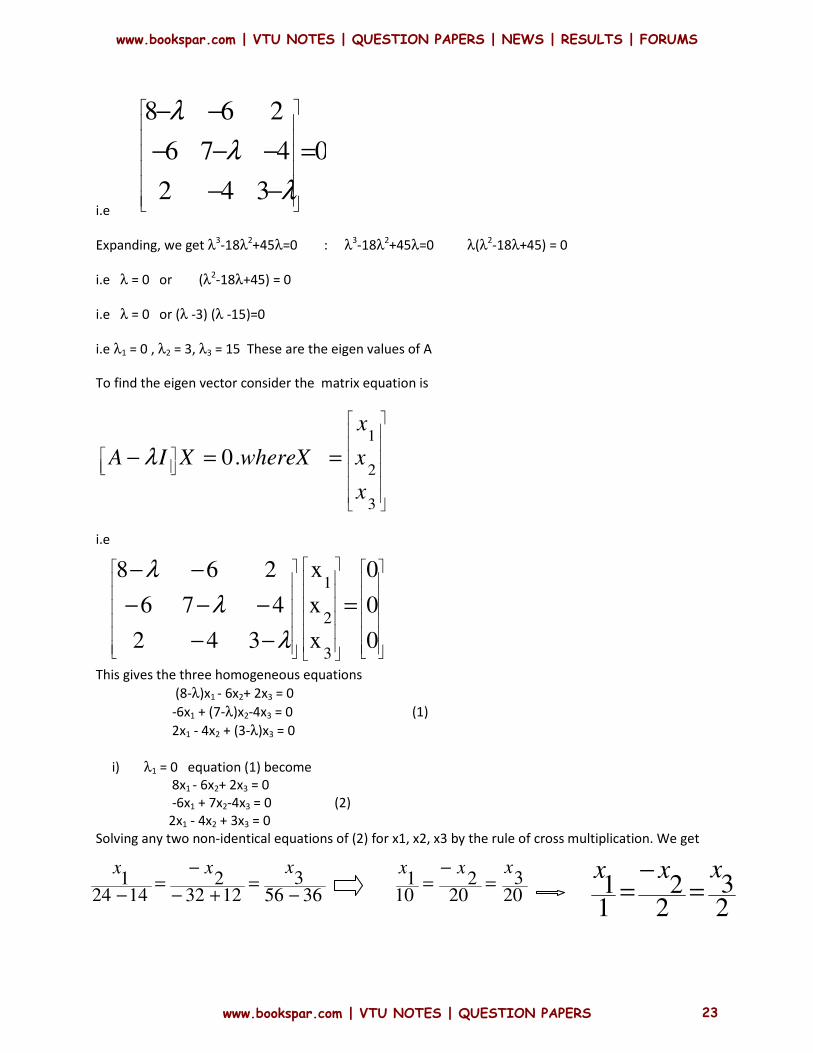
i.e
Expanding, we get λ3-18λ2
+45λ=0 : λ3-18λ2
+45λ=0 λ(λ2-18λ+45) = 0
i.e λ = 0 or (λ2-18λ+45) = 0
i.e λ = 0 or (λ -3) (λ -15)=0
i.e λ1 = 0 , λ2 = 3, λ3 = 15 These are the eigen values of A
To find the eigen vector consider the matrix equation is
i.e
This gives the three homogeneous equations
(8-λ)x1 - 6x2+ 2x3 = 0
-6x1 + (7-λ)x2-4x3 = 0 (1)
2x1 - 4x2 + (3-λ)x3 = 0
i) λ1 = 0 equation (1) become
8x1 - 6x2+ 2x3 = 0
-6x1 + 7x2-4x3 = 0 (2)
2x1 - 4x2 + 3x3 = 0
Solving any two non-identical equations of (2) for x1, x2, x3 by the rule of cross multiplication. We get
0
342
476
268
=
−−
−−−
−−
λ
λ
λ
==−
3
2
1
.0
x
x
x
whereXXIA λ
=
−−
−−−
−−
0
0
0
x
x
x
342
476
268
3
2
1
λ
λ
λ
36563
12322
14241
−=
+−
−=
−
xxx
203
202
101
xxx=
−=
23
22
11
xxx=
−=
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 23
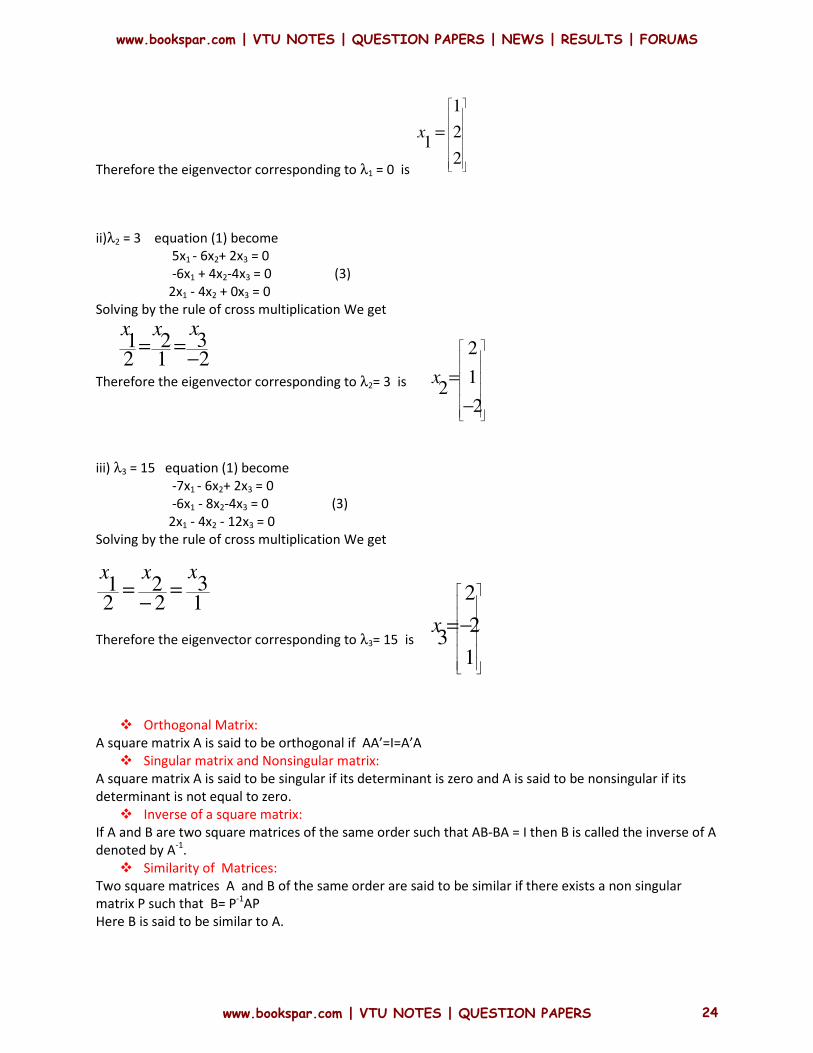
Therefore the eigenvector corresponding to λ1 = 0 is
ii)λ2 = 3 equation (1) become
5x1 - 6x2+ 2x3 = 0
-6x1 + 4x2-4x3 = 0 (3)
2x1 - 4x2 + 0x3 = 0
Solving by the rule of cross multiplication We get
Therefore the eigenvector corresponding to λ2= 3 is
iii) λ3 = 15 equation (1) become
-7x1 - 6x2+ 2x3 = 0
-6x1 - 8x2-4x3 = 0 (3)
2x1 - 4x2 - 12x3 = 0
Solving by the rule of cross multiplication We get
Therefore the eigenvector corresponding to λ3= 15 is
� Orthogonal Matrix:
A square matrix A is said to be orthogonal if AA’=I=A’A
� Singular matrix and Nonsingular matrix:
A square matrix A is said to be singular if its determinant is zero and A is said to be nonsingular if its
determinant is not equal to zero.
� Inverse of a square matrix:
If A and B are two square matrices of the same order such that AB-BA = I then B is called the inverse of A
denoted by A-1
.
� Similarity of Matrices:
Two square matrices A and B of the same order are said to be similar if there exists a non singular
matrix P such that B= P-1
AP
Here B is said to be similar to A.
=
2
2
1
1x
13
22
21
xxx=
−=
23
12
21
−==
xxx
−
=
2
1
2
2x
−=
1
2
2
3x
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 24

Example:
Reduce the matrix to the diagonal form .
Solution: The characteristic equation of A is
Are the eigen values of A.
Consider
Casei) let λ=1, we get -2x+3y=0 or 2x=3y or x/3 = y/2
X1 = (3,2)’ is the eigen vector corresponding to λ=1
Caseii) let λ=2,
we get -3x +3y = 0 or x = y or x/1 = y/1
X2 = (1,1)’ is the eigen vector corresponding to λ=2.
=− 0XIA λ
0)y-(42x- .
0
0
42
31 .
=+
=−−
−−
λλ
λ
ei
y
xei
−
−=
42
31A
0=− IA λ
2 10232042
31 . andei =⇒=+−⇒=
−−
−−
λλλλ
λ
==
==
AdjPp
andwe
XXP
11-p 1P have
12
13
21
matrix diagonal theis 20
011-p
20
01
22
23
32
11
12
13
42
31
32
111-p
32
111
==
=−
−=
−
−
−
−=
−
−=−
DAPThus
AP
P
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 25

Reduce the following matrices into diagonal matrices
1500
030
000
:Ans.
342
476
268
A
200
010
000
:Ans.
6410
527
7411
−
−−
−
=
−−
−−
−−
=A
www.bookspar.com | VTU NOTES | QUESTION PAPERS | NEWS | RESULTS | FORUMS
www.bookspar.com | VTU NOTES | QUESTION PAPERS 26