universidad nacional de san juan -...
TRANSCRIPT

Universidad Nacional de San Juan
Facultad de Ingeniería
Departamento de Electrónica, Automática y Bioingeniería
Carrera de Bioingeniería
Asignatura “Biomecánica”
Unidad Nº 1: “Fundamentos de Biomecánica”
Dra. Ing. Silvia E. Rodrigo (Prof. Titular “Biomecánica” e “Ingeniería de Rehabilitación”)
Esp. Bioing. Carina Herrera (J.T.P. “Biomecánica” e “Ingeniería de Rehabilitación”)
Bioing. Fernando Muñóz (J.T.P. “Biomecánica” e “Ingeniería de Rehabilitación”)
Docentes:

MECÁNICA
Estudio del movimiento o deformación de la materia, y de
las fuerzas que causan ese movimiento o deformación.

Mecánica Aplicada
Mecánica de
Cuerpos Rígidos
Mecánica de
Cuerpos Deformables
Mecánica de
Fluidos
Estática
Dinámica Cinemática
Cinética
Elasticidad
Viscoelasticidad
Plasticidad
MECÁNICA
Estática
Dinámica
Líquidos
Gases
BIOMECÁNICA
Es una rama de la Bioingeniería, definida como la mecánica
aplicada a la biología.
La Biomecánica busca entender el efecto que ejercen sobre el
cuerpo humano y animal, fuerzas de origen interno y externo. Tal
efecto puede referirse al movimiento y/o deformación de los
tejidos, órganos o sistemas fisiológicos del cuerpo humano.

Objetivo: comprender y valorar el comportamiento mecánico
normal y patológico de los sistemas biológicos del ser humano,
así como proponer métodos de intervención artificial.

Video 1

La problemática de estudia la biomecánica puede abordarse desde
dos aspectos complementarios:
* ciencias básicas
* tecnología

Campo de Aplicación de la Biomecánica
- distribuciones de esfuerzos y deformaciones en biomateriales,
- flujo de biofluidos, tales como la sangre y el gas alveolar,
- propagación de ondas de presión y flujo sanguíneo en el sistema vascular,
- estabilidad de sistemas mecánicos, tales como el sistema locomotor humano,
- fuerzas articulares y musculares desarrolladas durante la actividad humana,
- diseño y desarrollo ortoprotésico.

La asignatura estudia la Biomecánica del Sistema Motor Humano
desde el punto de vista de:
• Mecánica de Cuerpos Rígidos
• Mecánica de Cuerpos Deformables (o Mecánica de Materiales)

Asignatura BIOMECÁNICA
Semestre: 5 Área: Tecnologías Básicas Sub área: Biomateriales y Biomecánica
Crédito Horario
Total 70 Correlatividad
Horas mínimas de
actividades
prácticas
FE RPI RPT APD Débiles Biología
15 15 Fuertes Física I
Objetivos:
- Conocer y comprender las propiedades mecánicas de los tejidos biológicos en general y del sistema motor en
particular.
- Aplicar dicho conocimiento al estudio y análisis de la biomecánica del sistema motor en condiciones normales y
patológicas.
- Desarrollar la capacidad de resolver problemas de aplicación de bioingeniería, relacionados con el comportamiento
mecánico del cuerpo humano en dichas condiciones.
Contenidos:
Fundamentos de Biomecánica. Biomecánica Postural y del Movimiento Corporal Humano. Biomecánica de Materiales
Biológicos. Aplicaciones.
Los contenidos de „Biomecánica’ se articulan horizontal y verticalmente con los contenidos
de otras asignaturas del Plan de Estudios de Bioingeniería de la UNSJ.

UNIDAD 1: FUNDAMENTOS DE BIOMECÁNICA
• Definición de la biomecánica: su campo de aplicación. Conceptos de mecánica de
materiales aplicables a biomecánica: esfuerzos y deformaciones de los materiales.
Conceptos de mecánica de cuerpos rígidos aplicables a biomecánica: estática y
dinámica de cuerpos rígidos.
PROGRAMA DE LA ASIGNATURA
UNIDAD 2: BIOMECÁNICA POSTURAL
• Análisis de la postura corporal desde el punto de vista geométrico y cinético.
Conceptos de estabilidad, balance y equilibrio. Biomecánica de las posturas de
bipedestación y sedestación. Aplicación a la Ergonomía.
UNIDAD 3: BIOMECÁNICA DEL MOVIMIENTO
• Cinemática y cinética (linear y angular) articular. Modelos biomecánicos del
cuerpo humano. Conceptos de antropometría. Técnicas analíticas y experimentales
de análisis del movimiento. Aplicación a la Biomecánica de la locomoción humana.
UNIDAD 4: BIOMECÁNICA DE MATERIALES BIOLÓGICOS
• Biomecánica de tejidos duros y blandos. Modelos biomecánicos de materiales
elásticos y viscoelásticos. Ecuaciones constitutivas de los materiales biológicos.
Aplicación a la Biomecánica de Impacto.
Condiciones de cursado de la asignatura “Biomecánica”
Asistencia efectiva a las clases teóricas (85%)
Asistencia efectiva y aprobación de todas las actividades prácticas (100%)
Aprobación de las 2 evaluaciones parciales de la materia.
Los alumnos que cumplan estas condiciones y aprueben con al menos 7
puntos las 2 evaluaciones parciales, podrán acceder al Régimen de
Promocionalidad de la asignatura (evaluación integrativa final).

CONCEPTOS DE MECÁNICA DE MATERIALES
APLICABLES A LA BIOMECÁNICA

En términos generales, para conocer y describir el comportamiento mecánico de un
material dado, analizamos el movimiento o deformación que genera las fuerzas que
actúan sobre este material.
Específicamente, desde el punto de vista de la Mecánica de Materiales o
Mecánica de Cuerpos Deformables, se considera que las fuerzas que actúan
sobre un material considerado generan deformaciones sobre éste.
Para describir este comportamiento se definen una serie de variables, tales como el
esfuerzo y la deformación, a saber:

En el espacio unidimensional (1D), se definen:
- Esfuerzo normal, (N/m2): es la fuerza por unidad de área que actúa sobre el
material considerado, perpendicular a la superficie.
- Deformación, : es el cambio de forma que se produce en el material por
efecto de las fuerzas aplicadas.
lo l Dl= l- lo
F F F F A
= F / A; = Dl / l0 = l – l0 / l0
Esfuerzo y Deformación Normal o Axial

- Esfuerzo tangencial o de corte, (N/m2): es la fuerza por unidad de área que actúa sobre
el material considerado, paralela a la superficie.
- Deformación por corte, : es el desplazamiento en dirección horizontal respecto de la
vertical.
- Velocidad de deformación por corte, : es la velocidad de desplazamiento en dirección
horizontal respecto de la vertical.
= Ft /A = Δx / Δy
Dx lo lo
Dy
Ft
Δx
Δy Δt
. =
Esfuerzo y Deformación de Cizalladura
.

F F
Dll = l1- lo
Dla = l3 - l2
lo
l2
= l1 - l0 /Dl1
´ = l3 - l2 /Dla
= - ´/ Razón de Poisson
Razón de Poisson para Esfuerzo Axial

Esfuerzo y Deformación de Torsión
Se produce por la acción de torcedura
que ejercen las fuerzas aplicadas en el extremo
libre del cilindro, representadas por la torca M.
El ángulo es una medida de la deformación en la
dirección longitudinal del cilindro y representa la
deformación por corte debida a las fuerzas de corte
inducidas en el plano transverso:
l
´BBarclong
Esfuerzo de corte, , que
representa la distribución de la
fuerza tangencial sobre la
sección transversal del cilindro
Momentos polares de inercia para
secciones transversales circulares.
Sección transversal circular de un
cilindro sometido a torsión.
Secciones transversales sólida y anillo

Además, la cantidad de deformación en la sección
transversal del cilindro también varía con respecto a
la distancia radial r, tal que es nula en el centro del
cilindro y aumenta en la dirección del anillo exterior,
en donde alcanza un máximo. Se define así el ángulo
de torsión como:
0r
´BBarclong
0r
l
es el ángulo de torsión.

Diferentes tipos de deformaciones en un material:
a) estiramiento; b) flexión; c) torsión; d) por corte.

De acuerdo a su constitución, los materiales reales se comportan como elásticos,
plásticos, viscoelásticos, diferenciándose también según su comportamiento
bajo carga y descarga.
Curvas de carga y
descarga para un material.
Diagrama de esfuerzo en función del tiempo para un material bajo carga.
Región elástica
Región plástica

Características de los Tejidos Biológicos
En términos generales, los tejidos biológicos se dividen en tejidos duros y
tejidos blandos. Entre los primeros se distinguen los tejidos esqueléticos (óseo,
articular y cartilaginoso), que básicamente se comportan como materiales
elásticos con altos módulos de rigidez.
Se designa como tejido blando al epitelial, conectivo, muscular y nervioso.
Tienen propiedades contráctiles y elásticas, con módulos de rigidez menores
a los de los tejidos duros.
Qué ecuación caracteriza el comportamiento de un material elástico?

CONCEPTOS DE MECÁNICA DE CUERPOS RÍGIDOS
APLICABLES A LA BIOMECÁNICA

Mecánica de
Cuerpos Rígidos
Estática
Dinámica
Cinética F = m a
M= I
Cinemática r, v, a
, ,
r; v = 0; a = 0
= 0; = 0
Análisis
geométrico
F = 0
M = 0
Análisis
cinético

Desde el punto de vista de la mecánica de cuerpos rígidos, el sistema
motor humano es una estructura compuesta por un sistema de palancas
articuladas sobre el que actúan fuerzas de tracción controladas y
reguladas por el sistema nervioso, posibilitando que el cuerpo humano
adopte diferentes posturas y realice distintos movimientos o
actividades.

Estructuras del cuerpo humano para la postura y la actividad
Sistemas nervioso, muscular y esquelético del cuerpo humano (vista frontal).
• Sistema esquelético: permite soportar el peso del cuerpo y adquirir
distintas posturas, o efectuar diferentes actividades o movimientos.
• Sistema muscular: generadores de fuerza activa para la postura y
movilidad del cuerpo humano.
• Sistema nervioso: coordina y controla toda la actividad motora
humana.

Sistema muscular
Músculo Esquelético
´
Hueso
Músculo
Fibra Muscular
Axón Motor
Terminales del Axón
Miofibrillas
Sarcómera
Miofibrilla
SarcolemaBanda
oscura A
Banda
clara I
Fibra Muscular
Endomisio
Fascículo
Perimisio
Epimisio
Músculo Esquelético
´
Hueso
Músculo
Fibra Muscular
Axón Motor
Terminales del Axón
Miofibrillas
Sarcómera
Miofibrilla
SarcolemaBanda
oscura A
Banda
clara I
Fibra Muscular
Endomisio
Fascículo
Perimisio
Epimisio
Endomisio
Fascículo
Perimisio
Epimisio
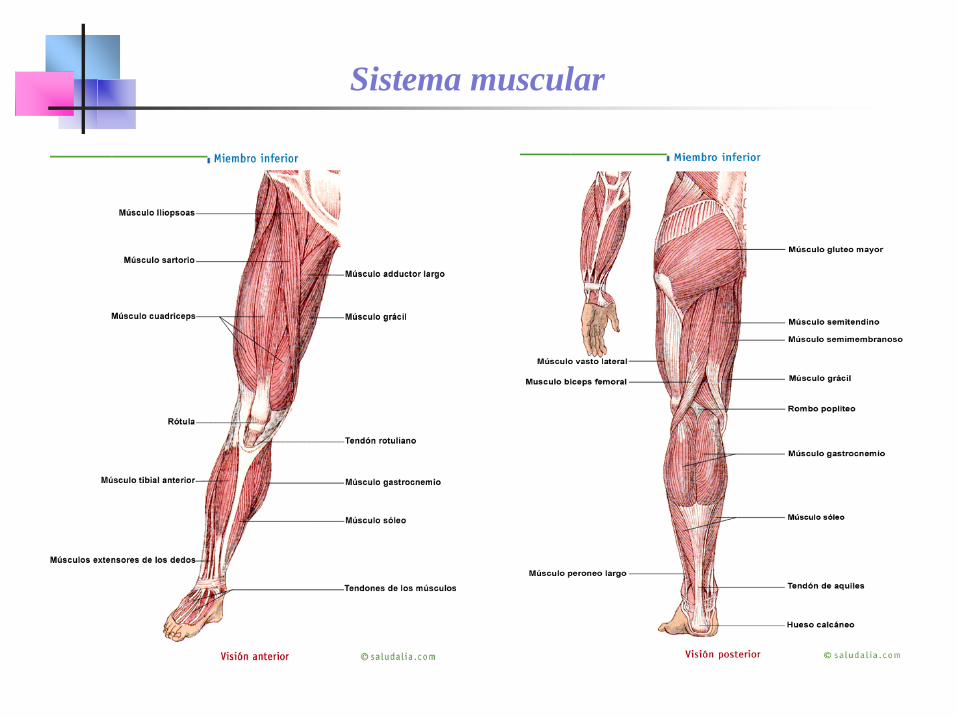
Sistema muscular

Lo que posibilita la postura y el movimiento corporal humano es el
movimiento articular, generado por los músculos bajo el control del
sistema nervioso.
Articulaciones: relación de contigüidad entre dos o más partes
esqueléticas, que pueden ser huesos o cartílagos.
En las articulaciones del aparato motor humano coinciden dos cabezas
óseas colindantes con sus cavidades, haciendo posible la realización de
movimientos de rotación.
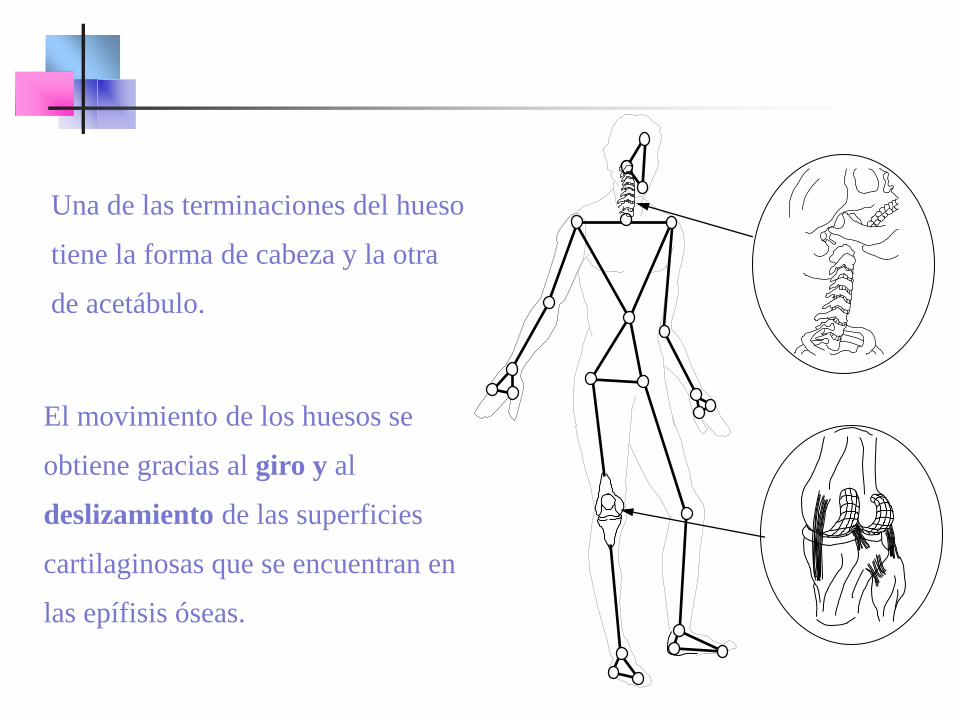
Una de las terminaciones del hueso
tiene la forma de cabeza y la otra
de acetábulo.
El movimiento de los huesos se
obtiene gracias al giro y al
deslizamiento de las superficies
cartilaginosas que se encuentran en
las epífisis óseas.

En función del tipo de movimiento, se clasifican en:
-sinartrosis (no móvil),
-anfiartrosis (con escaso movimiento),
-diartrosis (mayor amplitud de movimiento, con
distintos grados de libertad (GDL) según articulación
considerada.

La amplitud del movimiento articular es el rango de movimiento
angular entre sus límites extremos, que permiten la rotación
relativa entre los segmentos óseos a los cuales está vinculada la
articulación.
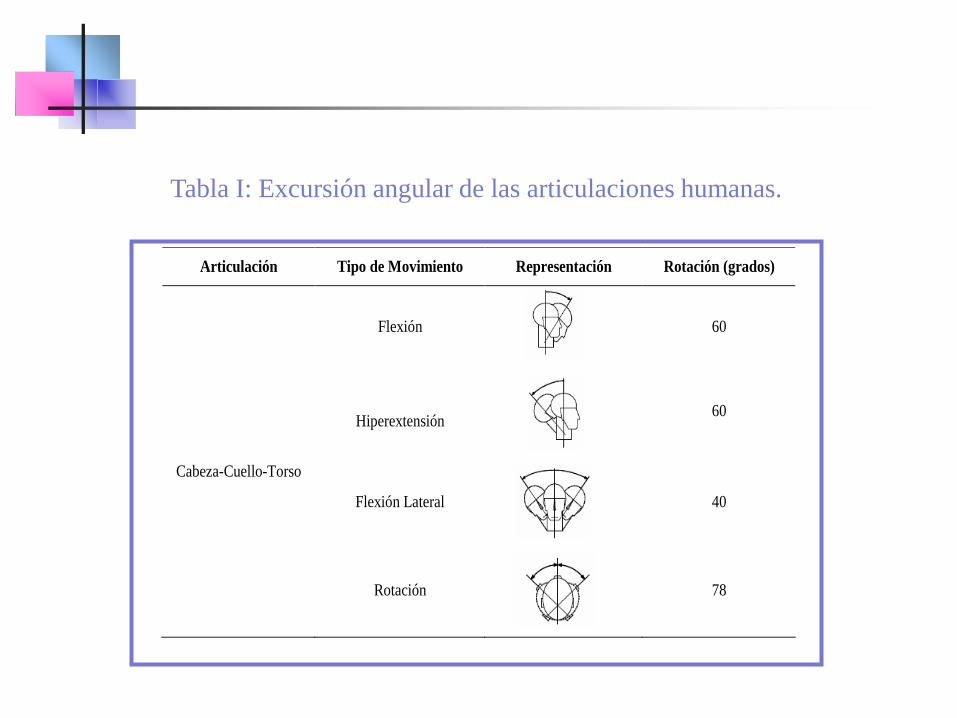
Articulación Tipo de Movimiento Representación Rotación (grados)
Flexión
60
Hiperextensión
60
Cabeza-Cuello-Torso
Flexión Lateral
40
Rotación
78
Tabla I: Excursión angular de las articulaciones humanas.

Articulación Tipo de Movimiento Representación Rotación (grados)
Flexión
180
Hombro Hiperextensión
58
Abducción
130
Tabla I: Excursión angular de las articulaciones humanas.

Articulación Tipo de Movimiento Representación Rotación (grados)
Codo
Flexión
141
Pronación/Supinación
90/90
Flexión/Extensión
70
Muñeca
Hiperextensión
30
Tabla I: Excursión angular de las articulaciones humanas.

Tabla I: Excursión angular de las articulaciones humanas.
Articulación Tipo de Movimiento Representación Rotación (grados)
Flexión
70
Torso superior-inferior Hiperextensión
30
Flexión Lateral
35
Rotación
35

Tabla I: Excursión angular de las articulaciones humanas.
Articulación Tipo de Movimiento Representación Rotación (grados)
Rodilla Flexión
125
Flexión
102
Hiperextensión
45
Cadera
Abducción/Aducción
53/31
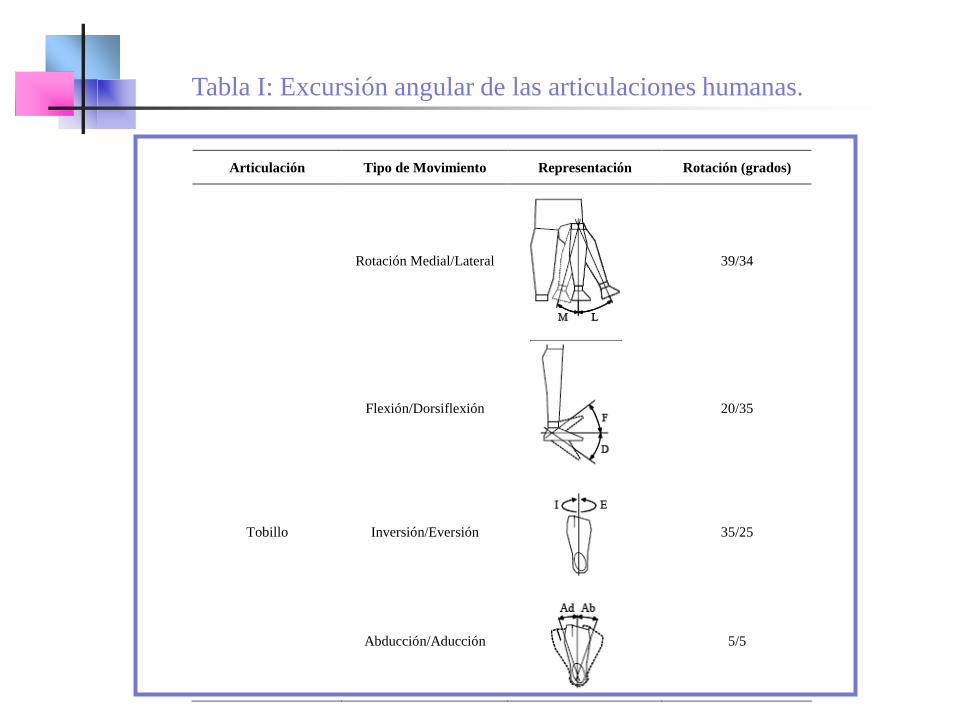
Tabla I: Excursión angular de las articulaciones humanas.
Articulación Tipo de Movimiento Representación Rotación (grados)
Rotación Medial/Lateral
39/34
Flexión/Dorsiflexión
20/35
Tobillo Inversión/Eversión
35/25
Abducción/Aducción
5/5

Figura 1: Huesos del codo. (A) Vista anterior
(B) Vista posterior (C) Vista lateral.
Figura 1: Ligamentos del codo. (A) Vista
anterior (B) Vista posterior (C) Vista lateral.
Articulación del codo: en realidad contiene 3 articulaciones, húmero-
ulna, (flex-ext), húmero-radial (flex-ext), radio-ulna (pron-sup).

Conceptos de Geometría aplicados a la Descripción de la
Postura y el Movimiento Humano

Para efectuar esta descripción se asume que el cuerpo considerado se
comporta como un cuerpo rígido, tal que las fuerzas que actúan sobre
éste determinan una postura (estática) o movimiento (dinámica).
Condición geométrica de rigidez: la distancia entre dos puntos
cualesquiera del cuerpo rígido permanece constante durante los cambios
de posición o el movimiento.

Desde el punto de vista geométrico, la postura de un solo cuerpo rígido
en un instante de tiempo determinado se describe a través de la posición y
orientación que tiene un punto P contenido en dicho cuerpo respecto de su
posición y orientación en un instante de tiempo previo.
Para esta descripción, utilizamos dos sistemas de coordenadas cartesianas
ortogonales: un S.C. global (SCG) fijo en el plano (2D) o en el espacio (3D),
y un S.C. local (SCL) asociado al cuerpo rígido, que se mueve en forma
solidaria con éste.

Además, entre ambos SCG y SCL puede existir:
Y
X O
y
x
j0 ≡ j1
i0 ≡ i1
- una coincidencia en posición y orientación
Y
X O
y
x j0
i0
j1
i1 o
- una traslación del SCL respecto del
SCG

- una rotación del SCL respecto del SCG
Y
X O
y x j0
j1 i0
i1
α
α
- una traslación y rotación del SCL respecto del SCG.
Y
X O
j0
j1
i0
i1
y
x α
α
o

En particular, para describir la rotación entre ambos S.C., definimos los
ángulos directores de un vector u respecto de un S. C. ortogonales:
ángulos (0 a 180º) que el vector forma con la dirección positiva de los
ejes coordenados.
P
ux O
Y
X
ū
α β
uy
Cosenos directores del vector u: cosenos de
los ángulos que u forma con la dirección
positiva de los ejes x e y en 2D y, con x, y, z
en 3D.

3D:
cos α = ux / |u|
cos β = uy / |u|
cos γ = uz / |u|
Y
X
P
ux O
ū
α β
uy
j0
i0
2D:
cos α = ux / |u|
cos β = uy / |u|
ux
Y
P
j0
i0
uy
O X
Z
k0
uz
α β
γ
ū
- Cuánto valen ux, uy y uz ?
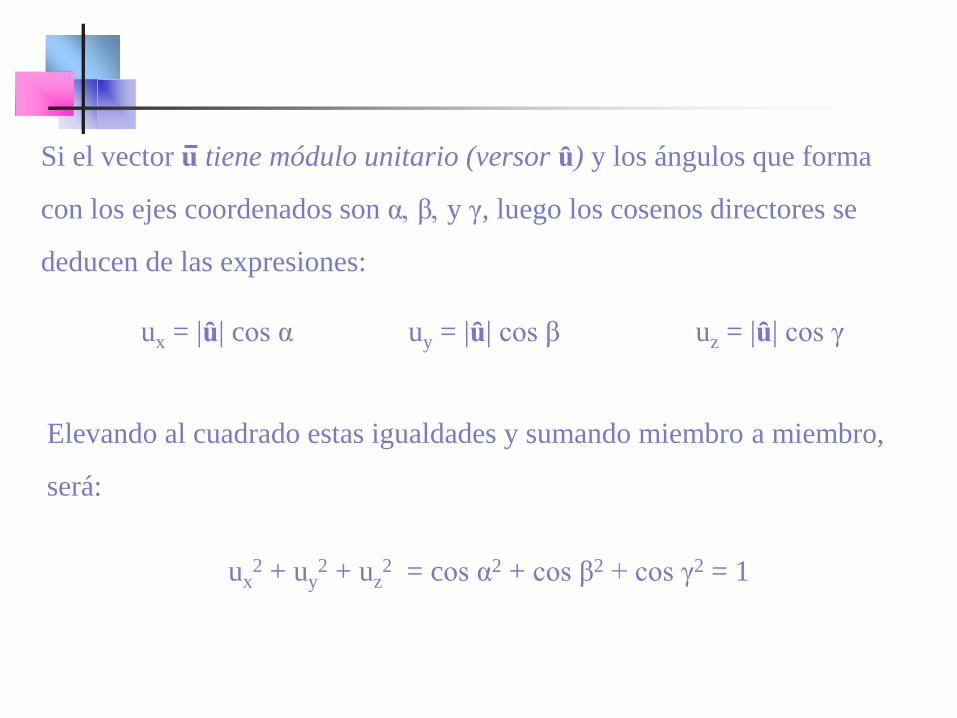
Si el vector u tiene módulo unitario (versor ȗ) y los ángulos que forma
con los ejes coordenados son α, β, y γ, luego los cosenos directores se
deducen de las expresiones:
ux = |ȗ| cos α uy = |ȗ| cos β uz = |ȗ| cos γ
Elevando al cuadrado estas igualdades y sumando miembro a miembro,
será:
ux2 + uy
2 + uz2 = cos α2 + cos β2 + cos γ2 = 1
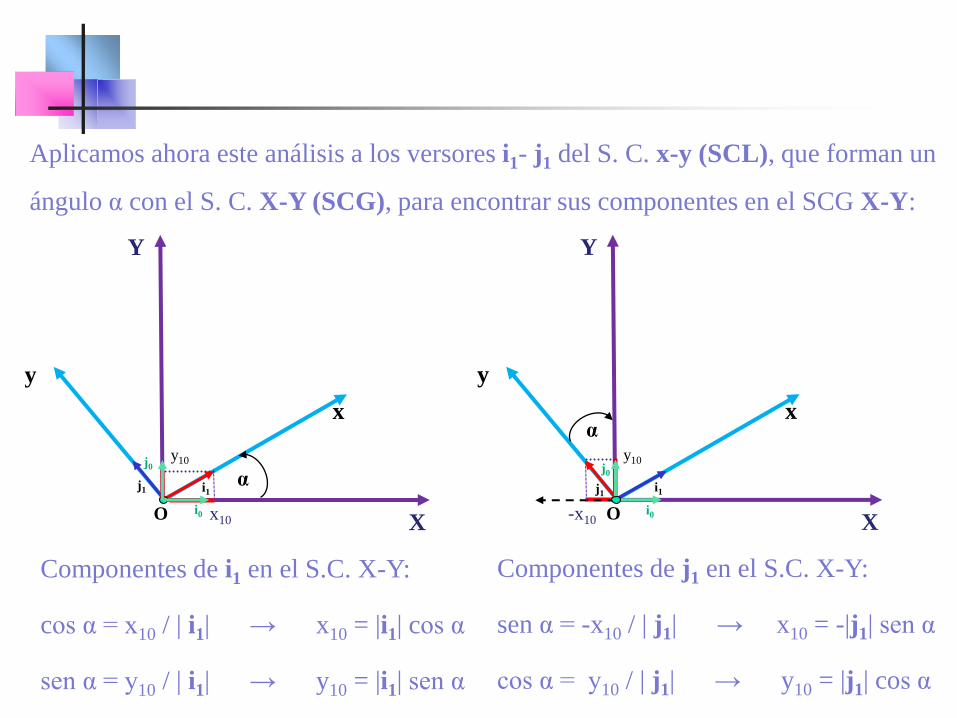
Aplicamos ahora este análisis a los versores i1- j1 del S. C. x-y (SCL), que forman un
ángulo α con el S. C. X-Y (SCG), para encontrar sus componentes en el SCG X-Y:
x10 i0
Componentes de i1 en el S.C. X-Y:
cos α = x10 / | i1| → x10 = |i1| cos α
sen α = y10 / | i1| → y10 = |i1| sen α
Y
X O
y
x
j0
j1 i1 α
y10
Componentes de j1 en el S.C. X-Y:
sen α = -x10 / | j1| → x10 = -|j1| sen α
cos α = y10 / | j1| → y10 = |j1| cos α
Y
X -x10 O
y
x
j0
j1
i0
i1
α y10
Y
X
x01
O
y
x
j0
j1
i0
i1
α
y01
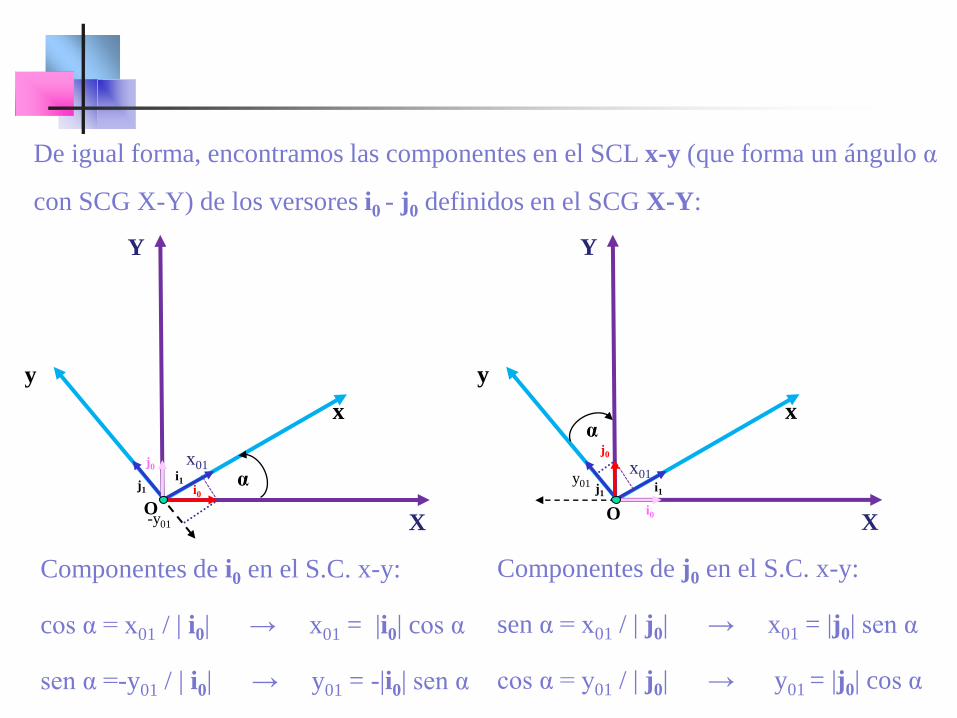
Componentes de j0 en el S.C. x-y:
sen α = x01 / | j0| → x01 = |j0| sen α
cos α = y01 / | j0| → y01 = |j0| cos α
De igual forma, encontramos las componentes en el SCL x-y (que forma un ángulo α
con SCG X-Y) de los versores i0 - j0 definidos en el SCG X-Y:
Y
X
x01
O
y
x
j0
j1 i0 i1 α
-y01
Componentes de i0 en el S.C. x-y:
cos α = x01 / | i0| → x01 = |i0| cos α
sen α =-y01 / | i0| → y01 = -|i0| sen α

Componentes de j0 en el SCL x-y:
sen α = x01 / | j0| → x01 = |j0| sen α
cos α = y01 / | j0| → y01 = |j0| cos α
Componentes de i0 en el SCL x-y:
cos α = x01 / | i0| → x01 = |i0| cos α
sen α =-y01 / | i0| → y01 = -|i0| sen α
Componentes de i1 en el SCG X-Y:
cos α = x10 / | i1| → x10 = |i1| cos α
sen α = y10 / | i1| → y10 = |i1| sen α
Componentes de j1 en el SCG X-Y:
sen α = -x10 / | j1| → x10 = -|j1| sen α
cos α = y10 / | j1| → y10 = |j1| cos α
Y
X O
y
x
j0
j1
i0
i1
α
α

i1 j1
i0
j0
cos α -sen α
sen α cos α
En términos del producto escalar entre los versores, también puede expresarse:
i0 i1 = |i0| |i1| cos α
i0 j1 = |i0| |j1| cos (90+α) = - |i0| |j1| sen α
j0 i1 = |j0| |i1| cos (90-α) = |j0| |i1| sen α
j0 j1 = |j0| |j1| cos α
Y
X O
y
x
j0
j1
i0
i1
α
α
110
110
jij
jii
cossen
sencos
001
001
jij
jii
cossen
sencos

Descripción de la posición de un cuerpo rígido:
coordenadas cartesianas en 2D
Y
El punto P perteneciente al cuerpo rígido (descripto en t = 0 por su vector posición rP0 en el
SCG y por rP en el SCL) cambió su posición en t = t1 (definida por su vector posición rP1
en el SCG y por rP en el SCL) mediante una traslación pura.
Sistemas de coordenadas global XY (SCG) y local xy (SCL) para describir la posición del cuerpo
rígido a partir de la posición del punto P perteneciente a este cuerpo
t = 0
P
j0
i0 x01
y01
O
t = t1
X
j1
i1
y
x
rP1 r01
rP
x11
y11
P
j0
i0 x00
y00
rP0
O
Y
X
j1
i1
y
x r00
rP
x10
y10

Descripción de la orientación de un cuerpo rígido en 2D
1100
11P
00P
jiji
jir
jir
0000
00
00
1100
11
00
yxyx
yx
yx
001
001
jij
jii
cossen
sencos
Relación entre los sistemas de
coordenadas local y global:
Y
X
j0
i0 x00 ≡ x10 O
rP j1
i1
y
x
P y00 ≡ y10
t = 0 Y
X x01 O
rP
y
x
P y01
j0
j1
i0
i1
x11
y11
t = t1
1
1
1
1
cs
sc
R 11
1
1
0
0
y
x
y
x
P1P0 rr
i1 j1
i0
j0
cos -sen
sen cos
110
110
jij
jii
cossen
sencos

Descripción de posición y orientación de un cuerpo rígido en 2D
Y
X
Y
X
j0
i0 O
rP j1
i1
y
x
P
xPG
O
rP
y
x
P
yPG
j0
j1
i0
i1
xPL yPL
t = 0 t = t1
L
L
1
1
G
G
L11G
cs
sc
R
P
P
0
0
P
P
y
x
y
x
y
x
P0P0P r rrrr
rPG
r01
i1 j1
i0
j0
cos -sen
sen cos
x00 ≡ x10
y00 ≡ y10
x01
y01

Descripción de la posición de un cuerpo rígido:
coordenadas cartesianas en 3D
t = 0 t = t1
x01 x00
Y
P
j0
i0
y11
O X
j1
i1
y
x P
j0
i0
rP0
O
Y
X
j1
i1
y
x
r10
rP
rP1 r11
rP
Z
k0 k0
Z
k1
z k1
z
z01
y00
z00
El punto P del cuerpo rígido (descripto en t = 0 por su vector posición rP0 en el SCG y
rP en el SCL) cambió su posición en t = t1 (definida por su vector posición rP1 en el
SCG y rP en el SCL) mediante un desplazamiento puro.

Representación de la orientación: matrices de rotación en 3D (I)
1
1
1
0
0
0
0001
0001
0001
),(
cos
cos
z
y
x
100
0cs
0sc
z
y
x
Rz
100
0sen
0sen
rR
kjik
kjij
kjii
Rotación alrededor del eje z
i1 j1 k1
i0
j0
k0
cos -sen 0
sen cos 0
0 0 1
j1 i1
i0
j0
Y
X
y
x
Z ≡ z
k0 ≡ k1
P
r
O

Representación de la orientación: matrices de rotación en 3D (II)
j0 ≡ j1 i1
i0
Y ≡ y
X Z
k0 k1
O
Rotación alrededor del eje y
i1 j1 k1
i0
j0
k0
cos 0 sen
0 1 0
-sen 0 cos
1
1
1
0
0
0
0001
0001
0001
z
y
x
c0s
010
s0c
z
y
x
R),y(
cos0sen
010
sen0cos
rR
kjik
kjij
kjii
z
x

Representación de la orientación: matrices de rotación en 3D (III)
j1
i0 ≡ i1
j0
Y
X ≡ x
Z
k0
k1
O
Rotación alrededor del eje x
i1 j1 k1
i0
j0
k0
1 0 0
0 cos -sen
0 sen cos
1
1
1
0
0
0
0001
0001
0001
z
y
x
cs0
sc0
001
z
y
x
R),x(
cossen0
sencos0
001
rR
kjik
kjij
kjii
y
z

Representación de posición y orientación de un cuerpo rígido en 3D
j1
i0 ≡ i1
j0
Y
X ≡ x
Z
k0 k1
O
Ecuación genérica:
y
z
PL
PL
PL
,,
G0
G0
G0
PG
PG
PG
L,,GGG
z
y
x
R
z
y
x
z
y
x
R
P0P0P r rrrr
j0 ≡
j1 i1
i0
Y ≡ y
X Z
k0
k1
O
z
x
j1 i1
i0
j0
Y
X
y
x
Z ≡ z
k0 ≡ k1
P
rP
O
P
rP
P
rP