universidade tecnologica federal do paran´ a´...
TRANSCRIPT

UNIVERSIDADE TECNOLOGICA FEDERAL DO PARANA
DEPARTAMENTO ACADEMICO DE ELETRONICA
CURSO DE ENGENHARIA DE COMPUTACAO
AMANDA MICOSKI LINSDALTON ERASMO DOS SANTOS
KELVIN ELTON NOGUEIRA DA SILVALIEGE BAUER KLUPPEL
INSTRUMENTO MUSICAL ELETR ONICO BASEADO NA
DETECCAO DE ONDAS MECANICAS EM UMA SUPERF ICIE
MONOGRAFIA
CURITIBA
2010

AMANDA MICOSKI LINSDALTON ERASMO DOS SANTOS
KELVIN ELTON NOGUEIRA DA SILVALIEGE BAUER KLUPPEL
INSTRUMENTO MUSICAL ELETR ONICO BASEADO NADETECCAO DE ONDAS MECANICAS EM UMA SUPERF ICIE
Monografia apresentadaa Unidade Curricular deOficina de Integracao II do Curso de Engenharia deComputacao da Universidade Tecnologica Federaldo Parana como requisito parcial para aprovacao.
Orientador: Prof. Juliano Mourao Vieira
Co-orientador: Prof. Hugo Vieira
CURITIBA
2010

AGRADECIMENTOS
Agradecemos primeiramente aos professores Hugo Vieira e Mario Sergio Freitas pela forma
livre divertida como foi ministrada a disciplina de Oficina II e pelo seu apoio em todo desen-
volvimento do projeto. Agradecemos tambem ao professor Juliano Vieira por suas dicas e sua
forma descontraıda de orientar este projeto. Assim tambem agradecemos ao professor Nestor
Saavedra por suas contribuicoes na banca de avaliacao e ao mestrando em Fısica Luiz Eduardo
Nishino Gomes do Amaral pelas ideias sobre o problema de Apolonio.
Este projeto nao seria possıvel sem a ajuda, opinioes e ate emprestimo de materiais de
alguns de nossos colegas de curso como Vinicius Zaramella e Tarik Erkermann Pinto.

“A musica esta em tudo. Do mundo sai um hino.”
(Victor Hugo)

RESUMO
LINS, Amanda M.; SANTOS, Dalton E. dos; SILVA, Kelvin E. N., KLUPPEL, Liege B.. Ins-trumento Musical Eletronico Baseado na Deteccao de Ondas Mecanicas em uma Superfıcie. 43f. Monografia – Curso de Engenharia de Computacao, Universidade Tecnologica Federal doParana. Curitiba, 2010.
Este trabalho apresenta detalhes praticos e teoricos do projeto de um instrumento musical seme-lhante a um teclado, porem sem teclas fısicas, baseado na deteccao de pulsos por acelerometrosem comunicacao com um microcontrolador Arduino. Traz tambem uma revisao bibliograficasobre os componentes do sistema, vibracoes e ondas mecanicas e a localizacao por trilateracao.
Palavras-chave:Teclado, Acelerometro, Arduino

ABSTRACT
LINS, Amanda M.; SANTOS, Dalton E. dos; SILVA, Kelvin E. N., KLUPPEL, Liege B.. Elec-tronic Musical Instrument Based on Mechanical Wave Detection on a Surface. 43 f. Monografia– Curso de Engenharia de Computacao, Universidade Tecnologica Federal do Parana. Curitiba,2010.
This paper presents theoretical and practical details about the implementation of a musical ins-trument that is similar to a keyboard, but without physical keys, based only on pulse detectionby accelerometers communicating to an Arduino board. It also presents a literature revisionabout mechanical waves, vibration, localization using thetrilateration method, and the systemcomponents.
Keywords: Keyboard, Acelerometer, Arduino

v
LICENCA
Este trabalho esta licenciado sob uma Licenca Creative Commons, Attriburion Non-Commercial
Share Alike (Atribuicao Uso Nao-Comercial-Compartilhamento) pela mesma Licenca 2.5 Bra-
sil. Para visualizar uma copia dos termos de compromisso desta licenca acesse o sitehttp:
//creativecommons.org/licenses/by-nc-sa/2.5/br/.
O software produzidoe livre e segue a licenca GNU General Public License terceira versao
publicada pela Fundacao de Software Livre, que pode ser acessada emhttp://www.gnu.
org/licenses.

LISTA DE FIGURAS
–FIGURA 1 EQUACOES DO METODO DA TRILATERACAO . . . . . . . . . . . . . . . . . . . 17–FIGURA 2 METODO DA TRILATERACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17–FIGURA 3 DIAGRAMA EM BLOCOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 19–FIGURA 4 SISTEMA DE CAPACITORES . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 20–FIGURA 5 ARDUINO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . 21–FIGURA 6 MULTIPLEXADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 22–FIGURA 7 ESQUEMA DE COMUNICACOES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23–FIGURA 8 ESQUEMA FISICO DO SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25–FIGURA 9 ESQUEMATICO DA PLACA CONTENDO O ACELEROMETRO . . . . 32–FIGURA 10 ESQUEMATICO DA PLACA CONTENDO O ARDUINO E O MULTI-PLEXADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . 33–FIGURA 11 DIAGRAMA DE GANTT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 38
LISTA DE TABELAS
–TABELA 1 ALGUMAS PROPRIEDADES ELASTICAS DE MATERIAIS . . . . . . . 16

LISTA DE SIGLAS
IDE Integrated Development Environment
I2C Inter-Integrated Circuit
DIN Deutsches Institut fur Normung
GND Ground
VCC Tensao de Corrente Contınua
USB Universal Serial Bus
SCL Serial Clock Line
SDA Serial Data Line
MIDI Musical Instrument Digital Interface
SRAM Static Random Access Memory
MCTL Mode Control
PDTH Pulse detection threshold limit value
PW Pulse duration value
EEPROM Electrically-Erasable Programmable Read-Only Memory

LISTA DE SIMBOLOS
ω frequencia angular
ϕ angulo de fase
λ comprimento de onda
ρ densidade do meio

SUMARIO
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . 111.1 MOTIVACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 111.2 OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . 121.2.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.2 Objetivos Especıficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 122 FUNDAMENTAC AO TEORICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1 VIBRACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 132.1.1 Tipos de Vibracao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 132.1.2 Ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.3 Conceitos basicos de elasticidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 162.2 LOCALIZACAO DE EPICENTROS ATAVES DE TRILATERACAO . . . . . . . . . . . . . 163 ESPECIFICACOES DO SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193.1 COMPONENTES DO SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . 193.1.1 Acelerometro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 203.1.2 Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1.3 Multiplexador Analogico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 223.2 PROTOCOLO I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 233.3 MIDI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 244 METODOLOGIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 254.1 FUNDAMENTOS DO PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 254.2 PASSOS SEGUIDOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 264.3 FUNCIONAMENTO GERAL DO SISTEMA . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 274.4 SOFTWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 284.4.1 Configuracoes do acelerometro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 284.4.2 Identificacao das batidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 284.4.3 Calibragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.4.4 Sinal MIDI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.5 HARDWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 325 RESULTADOS E DISCUSSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.1 RESULTADOS OBTIDOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 345.2 DIFICULDADES DO PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 355.3 ANALISE DO PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 355.4 CRONOGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 355.5 DIAGRAMA DE GANTT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 366 CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 396.1 PROJETOS FUTUROS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 39REFERENCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 41

11
1 INTRODUCAO
“Sem musica a vida seria um engano”. Nesta frase o filosofo Friedrich Wilhelm Nietzsche
nao poderia definir melhor a importancia da musica. Tendo muitos aspectos e significados
diferentes na historia, a musica - assim como a literatura e todas as formas de arte - sempre foi
a representacao do pensamento e estilo da sociedade. Assim tambem os instrumentos musicais
que, alem disso, representam tambem o nıvel tecnico e tecnologico de cadaepoca, a evolucao
do artesanato ate a industria.
Atraves dos instrumentos, a musica entrou na ciencia e na tecnologia. Segundo (COWELL,
2002), hoje muitos dos amplificadores digitais tem capacidade de processamento digital com-
paraveis aos de uma instalacao de radar das forcas aereas americanas. Naoe coincidencia que
muitos engenheiros sao tambem excelentes musicos. A tecnologia nos intrumentos musicaise
soma de duas paixoes: engenharia e musica.
Essas paixoes levaram muitos estudantes de eletronica e computacao, principalmente, a
produzir intrumentos musicais das formas menos ordinarias possıveis. Do estudo destes proje-
tos surgiu a proposta apresentada neste trabalho. Apos formular algumas ideias e seguindo a
indicacao do professor Hugo Vieira Neto, foi possıvel definir a pergunta-base desta monografia:
“ E possıvel criar um instrumento musical que funciona atraves da deteccao de pulsos de ondas
mecanicas em uma superfıcie utilizando acelerometros?”.
1.1 MOTIVACAO
Paixao por musica e engenharia foi o grande motivo da proposta deste trabalho. Esta con-
siste na criacao de um instrumento musical semelhante a um teclado musical, porem sem teclas,
baseado apenas na deteccao de pulsos de ondas mecanicas em uma superfıcie utilizando ace-
lerometros. A proposta, portanto, integra conhecimentos de fısica, eletronica e computacao
alem de um estudo sobre musica.
Inicialmente alguns membros da equipe ja tinham a ideia de desenvolver um instrumento
12
musical que se assemelhasse a um teclado, porem sem utilizar as teclas convencionais. A partir
disto, entramos em acordo de que o tempo e conhecimento necessarios para a realizacao do
projeto eram adequados com a realidade. Outro motivo foi a facil aquisicao dos acelerometros,
cedidos pelo professor Hugo, bem como a existencia de projetos semelhantes.
1.2 OBJETIVOS
1.2.1 Objetivo Geral
O principal objetivo do trabalhoe desenvolver um instrumento musical eletronico que
identifique batidas mecanicas em uma superfıcie, de modo similar ao funcionamento de um
sismografo. Este artefato dispoe de tres acelerometros para identificar os pulsos das ondas
mecanicas na superfıcie, bem como de um microcontrolador para realizar a comunicacao com
os sensores e com um computador.
1.2.2 Objetivos Especıficos
• Utilizar os conceitos de sismologia para identificar o epicentro das vibracoes;
• Compreender o funcionamento dos sensores (acelerometros) e seus diferentes modos de
operacao;
• Estudar sobre o comportamento de ondas mecanicas em diferentes tipos de materiais;
• Aprender a utilizar um microcontrolador, especialmente, oArduino Duemilanove, para
controlar e monitorar os sensores;
• Gerar dados de saıda em um formato padrao de som (MIDI) a partir das informacoes
coletadas.
• Compreender o protocolo de comunicacao I2C.

13
2 FUNDAMENTAC AO TEORICA
2.1 VIBRACAO
Como o princıpio basico do funcionamento do projeto consiste na deteccao de vibracoes,e
de suma importancia a revisao de conceitos fısicos da sismologia, tais como vibracao, ondas e
elasticidade.
O termo vibracao refere-se a oscilacoes mecanicas sobre um ponto de equilıbrio. As
oscilacoes podem ser periodicas, como o movimento de um pendulo, ou aleatorias, como o
movimento de um pneu em uma estrada irregular.
Vibracoes sao indispensaveis em certas ocasioes como no movimento de um diapasao, na
palheta de instrumentos de sopro, ou no cone de um alto falante; elae necessaria para garantir o
funcionamento correto de diversos dispositivos. Porem, mais frequentemente, vibracoes sao in-
desejaveis, pois desperdicam energia e geram sons indesejados -ruıdos. Por exemplo, os movi-
mentos vibracionais de maquinas, motores eletricos, ou qualquer outro dispositivo mecanico em
operacao sao normalmente indesejados. Essas vibracoes podem ser causadas por desequilıbrios
nas partes rotativas, na engrenagem, atrito desigual etc. Projetos cuidadosos geralmente mini-
mizam as vibracoes indesejaveis.
Segundo (BHATTI, 2010), os estudos do som e da vibracao estao intimamente ligados.
Som, ou “ondas de pressao”, e gerado por estruturas vibratorias (por exemplo, as cordas vo-
cais); estas ondas de pressao tambem podem induzir a vibracao das estruturas (por exemplo, o
tımpano). Assim, a tentativa de se reduzir um ruıdo e, muitas vezes, um problema na tentativa
de se reduzir uma vibracao.
2.1.1 Tipos de Vibracao
• Vibracao livre: ocorre quando o movimento de um sistema mecanico resulta apenas de
condicoes iniciais, sem nenhuma influencia externa durante a vibracao. O movimento de
um penduloe um exemplo de vibracao livre. Bhatti ainda cita como exemplo bater em

14
um diapasao e deixa-lo tocar (BHATTI, 2010).
• Vibracao forcada:e quando uma forca alternada ou movimentoe aplicado a um sistema
mecanico. Exemplos deste tipo de vibracao: uma maquina de lavar que trepida devido
a um desequilıbrio, vibracao de transporte (causada pelo motor de um caminhao, molas,
estrada, etc.), ou a vibracao de um edifıcio durante um terremoto. Na vibracao forcada, a
frequencia de vibracaoe a frequencia da forca ou movimento aplicado, com a ordem de
magnitude dependente do sistema mecanico em questao.
2.1.2 Ondas
Segundo a definicao de (HALLIDAY et al., 1996), a ondae considerada um sinal transmi-
tido entre dois pontos, com certa velocidade, transportando energia e momento, sem, contudo,
movimento direto de materia. Esta velocidade pode ser entendida como a velocidade com que
sinais ou informacoes podem ser transmitidos pelo pulso. Se este sinal precisade um meio ma-
terial para se propagar, como aagua, o ar ou um solido qualquer, trata-se de uma onda mecanica.
Por outro lado, se este sinal nao necessita de um meio para sua propagacao, como no caso da
luz, trata-se de uma onda eletromagnetica. Sendo a base deste trabalho o acelerometro, sensor
de aceleracao, esta revisao bibliografica abrangera apenas as ondas mecanicas. Como exemplo
de ondas mecanicas pode-se citar as sonoras, sısmicas, ou ondas se propagando em uma corda.
Durante a propagacao das ondas mecanicas, as partıculas do meio sofrem perturbacoes, mas
nao se movem junto com as ondas. Segundo (PIUBELLI et al., 2010), quando um meio material
sofre uma perturbacao que gera um movimento nas partıculas deste meio com direcao iguala
direcao de propagacao da perturbacao, esta ondae classificada como longitudinal (quantoa sua
direcao de propagacao), comoe o caso das ondas sonoras ou ondas de compressao ao longo
de uma mola. Quando a direcao do movimento destas partıculas for perpendiculara direcao da
propagacao da perturbacao, a ondae classificada como transversal, comoe o caso de um pulso
que se propaga ao longo de uma corda esticada.
Embora ondas possam apresentar diferentes formas, de acordo com (HALLIDAY et al.,
1996),e fundamental o entendimento de ondas de forma senoidal paraa compreensao de on-
das de qualquer outra forma. Uma onda senoidale gerada quando se aplica um movimento
transversala extremidade de uma corda num movimento harmonico simples. Movimento
harmonico simplese um movimento que se repete em intervalos regulares, onde o desloca-
mento da partıcula, desde a origem,e dado como uma funcao do tempo, de acordo com a
equacao 1.
x(t) = xmcos(ωt +ϕ) (1)

15
Ondexm e a amplitude,ω e a frequencia angular eϕ e oangulo de fase, todos constantes.
Segundo (HALLIDAY et al., 1996), a onda pode ter muitas formas, mas o comprimento
de onda λ (distancia entre dois pontos que se deslocam em fase) e a frequencia f (numero de
oscilacoes por unidade de tempo, tendo como referencia um dado ponto,a medida que a onda
passa por ele) sao fundamentais em cada uma delas. A velocidade escalar (v) de propagacao de
uma ondae definida em funcao destas duas grandezas pela equacao 2.
v = λ f , (2)
a qual indica que em um perıodo de oscilacao, a onda se desloca um comprimento de onda.
Para que uma onda, ao se propagar atraves de um meio, coloque as partıculas deste meio
em oscilacao, tal meio deve possuir inercia (para que seja armazenada energia cinetica) e elas-
ticidade (para que seja armazenada energia potencial). “Essas duas propriedades determinam
o quao rapidamente a onda pode se propagar no meio” (HALLIDAY et al., 1996). O caminho
inverso tambem pode ser feito, ao calcular a velocidade da onda atraves do meio em relacao a
essas duas propriedades.
Em meios materiais nao dispersivos, a velocidade de propagacao da onda nao depende de
sua frequencia. Caso contrario, o meioe classificado como dispersivo. Segundo (PIUBELLI et
al., 2010), ao desenvolver a teoria sobre ondas sonoras, demonstra-se para meios nao dispersi-
vos que a velocidadev de propagacao do pulsoe dada pela equacao 3, na qualB e o modulo
de Young, grandeza associadaa elasticidade do meio eρ e a densidade do meio - grandeza
referenteas caracterısticas inerciais do meio (PIUBELLI et al., 2010).
v =
√B
ρ(3)
A Tabela 1 apresenta valores do modulo de elasticidade B e a densidade do meioρ, que
evidenciam a dependencia da velocidade da onda com o meio.

16
Tabela 1: Algumas propriedades elasticas de materiaisMaterial Densidadeρ[Kg/m3] Modulo de YoungB[109N/m2] Veloc. de propagacaov[m/s]
Aco 7860 200 5044Alumınio 2710 70 5082
Vidro 2190 65 5448Concreto 2310 30 31622Madeira 525 13 4976
Osso 1900 9 2176Poliestireno 1050 3 1690
Fonte: [PIUBELLI et al., 2010]
Neste projeto, o ideal seria a utilizacao de um material em que a velocidade de propagacao fosse
baixa, para facilitar a interpretacao de dados - ja que estae baseada na diferenca de tempo da
captacao de vibracoes pelos acelerometros - atraves do Arduino. Sendo assim, o material es-
colhido para o teclado foi a madeira, pois, embora a velocidade de propagacao das ondas neste
meio seja maior que no osso e no poliestireno, estee um material mais acessıvel que os dois
anteriores.
2.1.3 Conceitos basicos de elasticidade
De acordo com (DOURADO, 2001), ao se aplicar algum tipo de forc¸a na superfıcie de um
corpo, a elasticidade pode causar mudancas na forma ou no volume do mesmo. Da-se o nome
de elasticidadea propriedade dos corpos de resistirem a essas mudancas, i.e. de retornarema
forma ou volume inicial apos a retirada das forcas externas.
Se um corpo retorna a sua forma inicial apos a retirada da forca externa, elee um corpo
perfeitamente elastico. Segundo Dourado, com base nos conceitos de tensao e deformacao, a
teoria da elasticidadee o estudo das relacoes entre as forcas e as mudancas na forma ou volume
dos corpos.
Como a elasticidadee diretamente proporcionala velocidade - segundo a equacao 3 - um
bom material para o projeto, por motivos explicados anteriormente, teria baixa elasticidade
como a madeira, reforcando o porque da escolha deste material.
2.2 LOCALIZACAO DE EPICENTROS ATAVES DE TRILATERACAO
Trilateracao e um metodo de localizacao muito utilizado em GPS, aeronautica, robotica e
muitas outrasareas (THOMAS et al., 2005). Para determinar a posicao de um objeto, deve-
se conhecer a distancia dele a pelo menos tres objetos cujas posicoes sao conhecidas. Uma

17
maneira de aplica-lo e transformar cada objeto conhecido em uma circunferencia (ou esfera)
com centro na sua posicao e raio como sendo a distanciaa posicao que se quer determinar.
Assim, pode-se montar sistema de equacoes quadraticas, a partir das formulas geometricas das
circunferencias, cuja solucao sera o conjunto das distancias do ponto desconhecido ate o centro
de cada circunferencia (YU et al., 2007).
Figura 1: Equacoes do Metodo da Trilateracao
Figura 2: M etodo da Trilateracao
Fonte: (YU et al., 2007)
A aplicacao do metodo da trilateracao neste projeto foi baseada na Tecnica de Diferenca
no Tempo de Chegada descrita em (MAXIM et al., 2008), na qual a diferenca do tempo de
percepcao de tres sensores a um pulsoe transformada em distancia de acordo com a velocidade
do som no ar (aproximadamente 340,2 m/s). Como a localizacao dos sensorese conhecida, a
localizacao da fonte do pulso pode ser calculada por trilateracao. Porem, neste projeto, nao foi
possıvel obter uma solucao analıtica, pois a velocidade do som na madeira varia muito em cada
ponto devidoas deformacoes internas do material, dificultando o calculo das distancias. Por

18
este motivo foi utilizado um metodo estatıstico para a determinacao da localizacao do epicentro
do pulso.
E importante tambem ressaltar a diferenca entre trilateracao e triangulacao. Este metodo,
diferentemente do metodo da trilateracao, utiliza dosangulos entre objetos para determinar a
localizacao e nao as distancias entre eles (SIM, 2008).
Outra solucao semelhante encontrada foi o quee conhecido como “Problema de Apolonio”,
que vem do livro Tangencias de Apolonio de Perga no qual este descreve formas de se resolver
o problema de achar distancias entre tres objetos pelo metodo de tracar um cırculo tangente as
estes objetos (GISCH et al, 2004). Novamente nao foi possıvel encontrar uma solucao analıtica
devidoas dificuldades de medicao de vibracoes na madeira.

19
3 ESPECIFICACOES DO SISTEMA
3.1 COMPONENTES DO SISTEMA
O artefatoe, suficientemente, composto pelos seguintes componentes:
• Uma central de processamento (contendo o microcontroladorArduino);
• Tres pecas de deteccao de pulsos vibratorios a serem colocadas sobre uma superfıcie
(cases contendo um acelerometro);
• Tres cabos especıficos para a conexao de cada peca de deteccao a central de processa-
mento;
• Um cabo com extremidades do tipo MIDI;
• Uma fonte de alimentacao para a central de processamento.
Figura 3: Diagrama em Blocos

20
De forma mais especıfica, os componentes utilizados foram:
• 1 microcontrolador - Arduino Duemilanove;
• 3 Acelerometros digitais - marca Freescalec© modelo MMA7456L;
• 1 Multiplexador de 16 canais do fabricante Texas Instruments c© modelo CD74HC4067;
• 9 Resistores de 4.7kΩ ;
• 1 Resistor de 220Ω ;
A saıda sonora fica a cargo de qualquer dispositivo receptor de sinal MIDI, podendo ser
uma unidade profissional de producao deaudio ou ate mesmo um computador pessoal.
3.1.1 Acelerometro
O acelerometroe um sensor cujo objetivo principale converter variacoes de velocidade
em sinais eletricos que possam ser interpretados por outros dispositivos. Ha varios tipos de
acelerometros: piezoeletricos, eletro-mecanicos, capacitivos etc (MAGALHAES, 2010). Pos-
sui as mais variadas aplicacoes como calculos em queda livre, medicao da aceleracao de um
corpo em movimento, captacao de movimentos numa superfıcie e ate em notebooks e aparelhos
eletronicos para desligar o disco rıgido em caso de queda (FREESCALE, 2009).
Neste projeto foram utilizados acelerometros capacitivos. Os princıpios fısicos utilizados
neste tipo de acelerometro sao princıpios basicos da fısica newtoniana: Lei de Hooke e Segunda
lei de Newton acompanhadas de um sistema eletronico para o gerenciamento dos sinais de en-
trada e saıda do equipamento. Elee formado por tres sistemas: um sistema massa e mola, outro
de medicao do deslocamento e ainda um circuito de condicionamento desinal (GOMES, 2007).
.
Figura 4: Sistema de Capacitores
Fonte: (FREESCALE, 2009)

21
O sistema massa e mola corresponde a uma massa movel que se deslocara proporcional-
mentea variacao de velocidade aplicada. Istoe previsto pela Lei de Hooke (WU, 2010) a qual
diz que a forca que, segundo a Lei de Newton,e proporcionala aceleracao e tambem direta-
mente proporcional ao deslocamento da mola. Como mostra a figura 4, o sistema de medicao
do deslocamentoe formado por dois ou mais capacitores cuja capacitanciae dependente do
deslocamento da massa. Conforme o corpo sofre aceleracao numa direcao, a distancia entre
as placas dos capacitores varia e, assim, a capacitancia de cada um deles (REIDEMEISTER,
1992). Atraves dessas capacitancias obtidase gerado o sinal e entao e possıvel descobrir essa
distancia e calcular a aceleracao em cada eixo, dependendo do acelerometro. O sistema de
condicionamento de sinal varia de acordo com o fabricante dosensor.
Os acelerometros da marca Freescale modelo MMA7456L foram escolhidos por serem ace-
lerometros digitais, o que possibilita menor interferencia de ruıdo, e tambem por possibilitarem
a deteccao de pulsos de movimentos rapidos numa superfıcie. O baixo custo, alta resistencia a
choques e sua sensibilidade sao diferenciais desse modelo de acelerometro. O sistema de des-
locamento deste sensore chamado deg-cell e e feito de forma que o sinal geradoe calibrado e
proporcionala aceleracao (FREESCALE, 2009).
3.1.2 Arduino
O Arduinoe um projeto baseado em um sistema de codigo aberto, sendo assim bem flexıvel
e de manuseio acessıvel ate mesmo para iniciantes. Ele permite o desenvolvimento de objetos
interativos, com sensores, luzes, motores, entre outros, alem de poder ser desenvolvido de ma-
neira autonoma ou interligado a aplicacoes de computador (ARDUINO, 2010).
Figura 5: Microcontrolador Arduino
Fonte: (ARDUINO, 2010)

22
O ambiente de desenvolvimento, chamado Arduino IDE,e baseado em Processing, uma lin-
guagem de programacao baseada em Java. Ja o microcontrolador do Arduinoe programado
na linguagem de programacao Arduino, sendo essa baseada na liguagem Wiring. (ARDUINO,
2010)
O Arduino foi escolhido devido ao fato de ser uma plataforma flexıvel e de facil interfacea-
mento. O modelo a ser utilizadoe o Arduino Duemilanove (figura 5), uma vez quee compatıvel
com a porta USB, alem de ser o modelo mais basico e de menor custo.
3.1.3 Multiplexador Analogico
Um multiplexadore um dispositivo eletronico que possui varias entradas e apenas uma
saıda. Atraves de um circuito combinacional, o equipamento seleciona uma entrada para co-
necta-la a saıda unica (Silva, 2007). Essa selecao de entradae chamada multiplex, palavra
inglesa da qual deriva o nome do componente.
Neste projeto foi utilizado o multiplexador analogico de 16 canais CD74HC4067 do fa-
bricante Texas Instruments (TEXAS INSTRUMENTS, 2003). A figura 6 e um esquema do
componente. Sua utilizacao foi de extrema importancia para o controle de comunicacao entre
o microcontrolador e os acelerometros. Esse componentee compatıvel com o protocolo I2C e
este foi o principal motivo de sua inclusao no sistema. Um multiplexador de 4 canais seria su-
ficiente para interfacear os tres acelerometros, porem este componente foi emprestadoa equipe
que, por este motivo, decidiu utiliza-lo.
Figura 6: Multiplexador
Fonte: (TEXAS INSTRUMENTS, 2003)

23
3.2 PROTOCOLO I2C
Um protocolo de comunicacao e uma determinacao de regras para transmissao de sinais
e envio de dados entre dispositivos eletronicos que tem como objetivo controlar a ordem e
assegurar a chegada das mensagens. O protocolo I2C foi desenvolvido pela empresa Philips
(MOELANDS et al, 1987) nos anos 80. Esse sistema tem como baseo uso de apenas dois fios
para a comunicacao, um para o sinal declock(sincronizacao) e outro para a troca de dados.
As vantagens de seu uso estao na simplicidade e na exigencia de poucos fios e pinos para
comunicacao, o que produz custo menor na implementacao, assim como baixo tempo de res-
posta e flexibilidade quanto ao numero de componentes. Os dispositivos que se comunicam por
esse protocolo sao divididos em mestre e escravos (MOELANDS et al, 1987). O mestree o
componente que controla o sinal declockee, geralmente, o dispositivo de maior capacidade de
processamento no sistema.
Figura 7: Esquema de Comunicacoes I2C
Fonte: (ARDUINO BRASIL, 2010)
Para iniciar a comunicacao o mestre deve enviar as condicoes iniciais, como funcoes dos
componentes a serem utilizadas para o endereco de cada escravo. Como mostra a figura 7,
primeiro o mestre envia um bit de inicializacao chamado de Start bit. Logo apos envia um
pacote de dados de 1 byte (8 bits) do qual 7 bits correspondem ao endereco do escravo e 1 bit
indica see uma operacao de escrita ou leitura, istoe, se o mestre esta transmitindo ou recebendo
dados (SANTIAGO,2009). Entao o escravo identificado por este endereco, tendo recebidoa
mensagem, envia uma mensagem de confirmacao (1bit), chamada deacknowledge(do ingles,
reconhecimento) ou simplesmente ACK, nao havendo limite de pacotes (FILHO, 2010).
Assim, com o escravo identificado e disponıvel, o mestre envia ao escravo 8 bits correspon-
dentesa funcao escolhida e o dispositivo escravo selecionado para receber os dados responde

24
com o ACK para confirmacao. A comunicacao termina com um bit de finalizacao chamado de
Stop bit(ARDUINO BRASIL, 2010).
3.3 MIDI
Devido a necessidade de um protocolo padrao deaudio para que fosse possıvel realizar
a comunicacao entre instrumentos musicais eletronicos, computadores e sintetizadores de di-
versas marcas, foi criado, em 1982, o protocolo MIDI (Musical Instrument Digital Interface)
. Diferente do sinal analogico deaudio, o sinal MIDI nao transmite sinal deaudio, mas sim
mensagens com os eventos que devem acontecer [The MIDI Specification, 2006].
O protocolo opera a uma taxa de 31.250 bits por segundo. Ha um bit de inıcio, oito, de
informacao e mais um de encerramento. O conector padrao MIDI e composto de 5 pinos DIN
(Deutsches Institut fur Normung). Os pinos 1 e 3 nao sao usados. O pino 2e ligado ao GND
(terra), o pino 4 ao VCC (+5V) e o pino 5e utilizado para a transmissao de dados. Cabos
separados sao usados para a entrada (input) e para a saıda (output) de dados. Os bytes do
protocolo MIDI sao divididos entre bytes de informacoes e bytes de comandos. Os bytes de
comandos sao sempre maiores ou iguais a 128; ja os de informacoes sao sempre menores que
127. Os comandos definem, por exemplo, que uma nota devera ser tocada, que ela devera ser
desligada etc. As informacoes podem representar qual nota sera tocada, a duracao, frequencia
etc. [The MIDI Specification, 2006]
Os dispositivos MIDI podem ser classificados em dois tipos: Controladores e receptores.
Os controladores sao aqueles que mandam o sinal MIDI para os receptores o tratarem. Ha
dispositivos que funcionam tanto como controladores como quanto receptores, comoe o caso
da maioria dos teclados musicais. Para maiores informacoes a respeito do protocolo MIDI
sugere-se a leitura do livroMIDI For The Professional de Lehrman & Tully’s.
Com o objetivo de tornar portatil o instrumento especificado nesta monografia, para poder
ser utilizado de diversas formas (ligado a um computador, sintetizador etc.), foi optado por
empregar apenas uma saıda de sinal MIDI, a qual contem quais notas deverao ser tocadas e suas
respectivas duracoes.
As informacoes sobre a comunicacao MIDI se encontram na secao 4.4.4.

25
4 METODOLOGIA
4.1 FUNDAMENTOS DO PROJETO
O sistema proposto consiste na criacao de um instrumento musical eletronico semelhante
a um teclado musical, porem sem teclas fısicas. No lugar das teclas, a deteccao do toque na
superfıcie sera feita por acelerometros. Os principais componentes do projeto sao: um com-
putador que possua entrada USB, microcontrolador Arduino Duemilanove com Atmega 328 e
tres acelerometros MMA7456L da empresa Freescale. A figura 8 mostra o esquema da base de
madeira montada para o projeto e o posicionamento dos componentes.
A parte de hardware do sistemae dividida em mestre e escravos. O microcontrolador Ar-
duinoe o responsavel pelo controle de todo processo no sistema, por isso ele foi escolhido para
ser o mestre. Os tres acelerometros sao os escravos e se comunicam com o mestre atraves de
dois fios: um para a sincronizacao, chamado deSerial Clock Line( SCL), e outro para envio de
dados, chamado deSerial Data Line( SDA).
Figura 8: Esquema fısico do sistema
O funcionamento do sistema tem como base a funcao deteccao de pulso programada nos
acelerometros para detectar certos pulsos vibratorios na superfıcie. Ao pressionar a superfıcie

26
de apoio do sistema sera criado um pulso e cada acelerometro ira detectar esse pulso em tempos
diferentes. O acelerometro que estiver mais proximo percebera o pulso primeiro e assim os
outros em sequencia. Pela diferenca desses intervalos de tempo sera possıvel calcular aproxi-
madamente a posicao do inıcio do pulso, o seu epicentro.
Conhecendo esta posicao, o proximo passoe identificar a que nota musical pertence a regiao
pressionada e gerar o som MIDI que sera melhor descrito na secao 4.4.4.
4.2 PASSOS SEGUIDOS
Sendo musica e eletronica assuntos de grande interesse na producao deste trabalho e, anali-
sando propostas e projetos relacionados, foi formulada a hipotese de construcao de uma “harpa a
laser”. Porem, tal projeto revelou-se muito custoso e ate mesmo perigoso - pela grande potencia
necessaria para os lasers. Como mencionado anteriormente, o foco daequipe era a criacao de
um instrumento musical; tendo isto em mente, o grupo acatou asugestao do professor Hugo
Vieira Neto, na construcao de um instrumento com o uso de acelerometros.
Os sensores nao precisaram ser comprados, pois foram emprestados ao grupo pelo pro-
fessor; ja o Arduino foi comprado de uma lojaonline. Como o grupo nao possuıa conheci-
mento algum sobre o funcionamento de um acelerometro, durante tres semanas - 2a a 4a se-
mana - foi feito um estudo minucioso dedatasheetse documentosonlinesobre o acelerometro
MMA7456L e protocoloI2C.
Apos a primeira semana de estudo, o grupo comecou a realizar pequenos testes com o
acoplamento de um acelerometro ao microcontrolador, testes estes com o intuito de familiarizar
a equipe tanto ao acelerometro quanto ao microcontrolador, assim como a identificac¸ao dos
diferentes modos de deteccao disponıveis no acelerometro. Tambem foi realizado um estudo
bibliografico sobre vibracoes e ondas mecanicas, o que serviu como base para a escolha do
material a ser usado na base do instrumento - a madeira.
O sistema inicial foi montado com apenas um acelerometro em comunicacao com o mi-
crocontrolador. Foram realizados testes de deteccao de pulso e observou-se que a deteccao
de aceleracao estava correta em todos os eixos como informado no manual (datasheet) do
componente. Foi escolhido, entao, um dos modos de deteccao disponıveis no acelerometro
MMA7456L, denominadopulse detection(deteccao de pulso). Foi desenvolvido um software
para deteccao de pulso cuja saıda consistia em um texto no console informando a presenca de
um novo pulso.
Tendo como base o sistema inicial, foi planejada a montagem do circuito final, no qual

27
todos os acelerometros foram acoplados e foi desenvolvido um novo software. Nesta fase foram
encontradas muitas dificuldades no controle da comunicacao e entao foi estudada a utilizacao
de um multiplexador analogico, cuja descricao se encontra na secao 3.1.3.
Todos os esforcos se concentraram, entao, na deteccao de pulsos por cada acelerometro e na
comunicacao com o microcontrolador. Nesta fase foram encontradas dificuldades no hardware
e a necessidade de soldar os componentes para obter um melhorcontato eletrico, o que desviou
o foco para o desenho e montagem do sistema final.
Apos a soldagem, foi possıvel realizar a calibracao do sistema para identificar posicoes na
superfıcie, utilizando conceitos de trilateracao e um processo estatıstico para determinacao dos
tempos. Foi entao definida a largura das teclas virtuais do instrumento e foirelacionada uma
nota musical a cada uma delas. Para a reproducao destas notas musicais foi desenvolvido um
software cuja saıdae um sinal MIDI descrito na secao 3.3.
4.3 FUNCIONAMENTO GERAL DO SISTEMA
Apos a conexao e disposicao espacial adequada dos componentes, o sistema estara pronto
para o funcionamento, o qual consiste em uma etapa de inicializacao e outra posterior que
perdurara ate o desligamento. Na inicializacao, o microcontrolador Arduino executa operacoes
de configuracao de suas portas de entrada e saıda de dados. Sao elas:
• Selecionar a taxa de transferencia de dados (baud rate) adequada para a saıda MIDI;
• Preparar o protocolo I2C para a comunicacao com os acelerometros;
• Definir as entradas digitais que receberao os sinais de deteccao de pulsos por parte dos
acelerometros;
• Definir as saıdas digitais que controlarao o multiplexador.
Com o protocolo I2C estabelecido, o sistema configurara cada um dos acelerometros. Isto
se da pela escrita de valores nos diferentes registradores disponıveis nos acelerometros, em que
cada um define padroes de comportamento do componente. Essas configuracoes sao:
• Estabelecimento do modo de deteccao de pulso;
• Ajuste de sensibilidade na deteccao dos pulsos.

28
Ainda na inicializacao, sao carregadas na memoria volatil ( SRAM), a partir da memoria
nao volatil (EEPROM), as informacoes que, indiretamente, definem a relacao de cada nota
musical (tecla do teclado) com sua posicao na superfıcie.
Tendo as instrucoes anteriores sido executadas sem qualquer tipo de falha, osistema entra
em loop na espera por sinais de pulsos dos acelerometros e gera uma resposta aos pulsos, isto
e, um sinal MIDI relacionadoa nota musical que supostamente foi tocada.
A funcao executada a cada iteracao consiste em verificar se algum dos acelerometros enviou
um sinal de deteccao de pulso. Caso nenhum dos acelerometros tenha enviado esse sinal, nada
e feito e uma nova iteracao sera iniciada.
Ao receber um sinal de deteccao de pulso, o sistema o considera como um pacote contendo
os seguintes dados: momento de ocorrencia do pulso (na medida de tempo global do microcon-
trolador) e identificacao do acelerometro que o originou. Caso ainda nao haja tres registros de
pulsos, esse pacote de dados sobre o pulsoe armazenado na memoria e uma nova iteracao sera
iniciada.
Ao terceiro pulso detectado, o sistema ira rever a ordem com que cada pulso ocorreu e os
intervalos de tempo entre eles para que seja feita uma comparacao com os dados de cada posicao
mapeada previamente e eleita a provavel nota musical relacionada ao local tocado da superfıcie.
Se esta analise for concluıda com sucesso, um sinal MIDI com a finalidade de executar a nota
musical escolhidae emitido. Caso contrario, os pacotes sao ignorados, apagados e uma nova
iteracao sera iniciada.
4.4 SOFTWARE
4.4.1 Configuracoes do acelerometro
O software do sistemae o responsavel pela analise dos dados vindos dos acelerometros
e a emissao dos sinais MIDI. Elee executado na plataforma do microcontrolador Arduino e,
portanto, programado na sua linguagem.
4.4.2 Identificacao das batidas
A configuracao do acelerometro MMA7456L consiste na escrita de dados em certos regis-
tradores do componente. O acesso aos registradores se da pela comunicacao do microcontrola-
dor ao acelerometro, que se da pelo protocolo I2C.

29
Para o proposito deste artefato, somente tres registradores sao utilizados para a configuracao
dos acelerometros: o MCTL (Mode Control), o PDTH (Pulse detection threshold limit value)
e o PW (Pulse duration value) (FREESCALE SEMICONDUCTOR, 2009).
O MCTL e o responsavel pela selecao da forma de operacao do acelerometro, que neste
casoe aPulse Detection Mode(Modo de deteccao de pulsos). Este modoe o mais adequado, ja
que ajusta o acelerometro para detectar pequenas vibracoes e somente informa-las no momento
em que acontecem.
O PDTH e o PW estao ligadosa sensibilidade na deteccao de pulsos. Os valores numericos
para estes registradores foram determinados de maneira empırica, ou seja, valores tais quais
somente vibracoes relevantes para o sistema serao consideradas, visando minimizar ruıdos.
Em funcao da nao homogeneidade do material da superfıcie de onde serao detectadas as
batidas, o metodo da Trilateracao nao apresentou eficiencia. Portanto, a identificacao de batidas
neste artefato se da atraves do mapeamento anterior das posicoes de cada nota musical (ou
teclas virtuais do teclado). No entanto, essas posicoes se dao de maneira indireta. Ja que uma
batida sera detectda em diferentes momentos pelos tres acelerometros, o registro de uma “tecla
virtual” e composto pelas seguintes informacoes:
• Ordem temporal de deteccao dos pulsos entre os acelerometros, istoe, qual acelerometro
foi o primeiro a receber a vibracao, qual foi o segundo e qual foi o terceiro;
• Dois valores de intervalo de tempo, um para o intervalo de tempo entre a primeira e a
segunda vibracao e outro para a segunda e a terceira vibracao;
• A nota musical, ja no alfabeto MIDI, correspondentea posicao em questao.
No processo de calibragem (ver secao 4.4.3), sao definidas as posicoes referentes a cada
nota que artefato podera tocar. Estas informacoes sao gravadas na memoria nao volatil (EE-
PROM) do microcontrolador.
No decorrer da execucao do software, o sistema fica permanentemente aguardando um
sinal de deteccao de pulso dos acelerometros. Esse sinale emitido pelo pino INT1/DRDY do
acelerometro e recebido pelo microcontrolador por uma de suas portas digitais. Cada sinal de
deteccao de pulso vindo de um acelerometroe guardado na memoria (na forma de informacao
do momento de recepcao e de qual acelerometro se originou) para posterior analise.
Assim que os tres sinais sejam recebidos, finalmentee realizada a analise para a identificacao
de uma batida. Ja que se tem os momentos em que cada sinal foi recebido e, consequentemente,

30
os intervalos de tempo de percepcao da vibracao por parte dos acelerometros,e feita uma pro-
cura no banco de posicoes previamente mapeadas a fim de encontrar uma com a mesma ordem
de recepcao da batida por parte dos tres acelerometros e os intervalos de tempo mais proximos.
Essa analise pode resultar na escolha da nota musical mais provavel em relacao a posicao
de batida, ou simplesmente, caso os valores sejam muito discrepantes, a batidae descartada.
Se uma nota musical foi identificada, o sinal MIDI equivalente e emitido, caso contrario nadae
feito. Apos esta analise, os dados sobre as deteccoes de pulso sao apagadas e de forma cıclica
esse processo continuara.
4.4.3 Calibragem
Estee um modulo a parte do software que consiste em mapear as notas musicais na su-
perfıcie de batidas. Ja que, a princıpio, a superfıcie e definida (istoe, naoe possıvel a escolha
de uma superfıcie por parte do usuario), a calibragem devera ser realizada somente uma vez.
O princıpio da calibrageme o de se definir a posicao de uma nota musical baseado na media
dos dados coletados em varias batidas para esta mesma nota. Por exemplo: para se definir
onde sera a tecla virtual equivalentea primeira nota Do do instrumento, bate-se sucessivametne
no local desejado sobre a superfıcie; o software ira analisar os intervalos de tempo entre as
deteccoes de vibracao por parte dos acelerometros, tentando descartar elementos discrepantes e
apontando valores medios para a posicao da batida.
Ao final do processo de calibragem, as informacoes do mapeamento sao gravadas na EE-
PROM do microcontrolador. O espaco virtual ocupado por esses dados e a capacidade de ar-
mazenamento da EEPROM limitam o mapeamento em aproximadamente 250 teclas virtuais, o
quee muito mais que o suficiente neste projeto.
4.4.4 Sinal MIDI
Como ja mencionado na secao 3.3, a comunicacao do instrumento com dispositivos exter-
nos se dara por meio do protocolo MIDI. Apesar deste protocolo contar com diversos recursos
deaudio profissional, neste trabalho foi usado apenas um comando.
O comando utilizadoe o “note on” que, como diz o proprio nome, serve para ativar uma
nota. Os parametros deste comando sao qual nota a ser tocada (frequencia) e a intensidade
(volume). Para desativar a nota,e utilizado o mesmo comando, porem com o volume zero.
Como se pode observar no codigo a seguir. Atraves de uma saıda digital do Arduino,e enviado
o comando (cmd), a nota (pitch) e a intensidade ou volume (velocity).

31
void noteOn(int cmd, int pitch, int velocity)
Serial.print(cmd, BYTE);
Serial.print(pitch, BYTE);
Serial.print(velocity, BYTE);
32
4.5 HARDWARE
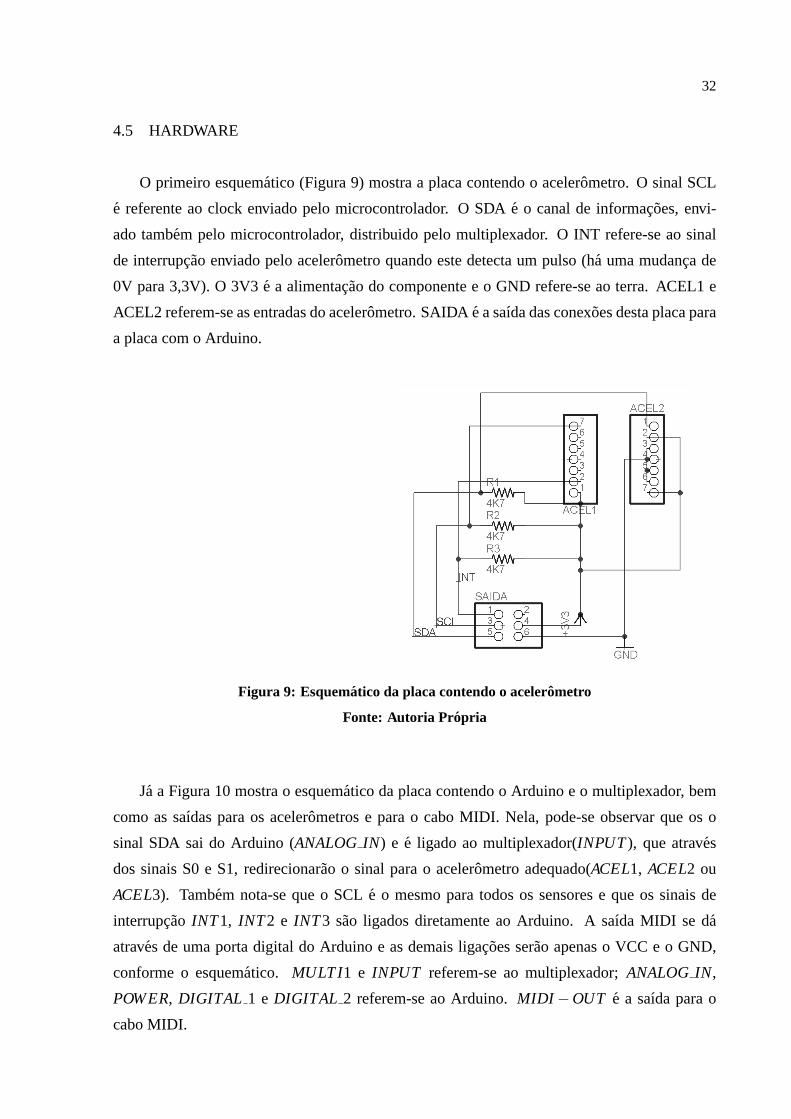
O primeiro esquematico (Figura 9) mostra a placa contendo o acelerometro. O sinal SCL
e referente ao clock enviado pelo microcontrolador. O SDAe o canal de informacoes, envi-
ado tambem pelo microcontrolador, distribuido pelo multiplexador. O INT refere-se ao sinal
de interrupcao enviado pelo acelerometro quando este detecta um pulso (ha uma mudanca de
0V para 3,3V). O 3V3e a alimentacao do componente e o GND refere-se ao terra. ACEL1 e
ACEL2 referem-se as entradas do acelerometro. SAIDAe a saıda das conexoes desta placa para
a placa com o Arduino.
Figura 9: Esquematico da placa contendo o acelerometro
Fonte: Autoria Pr opria
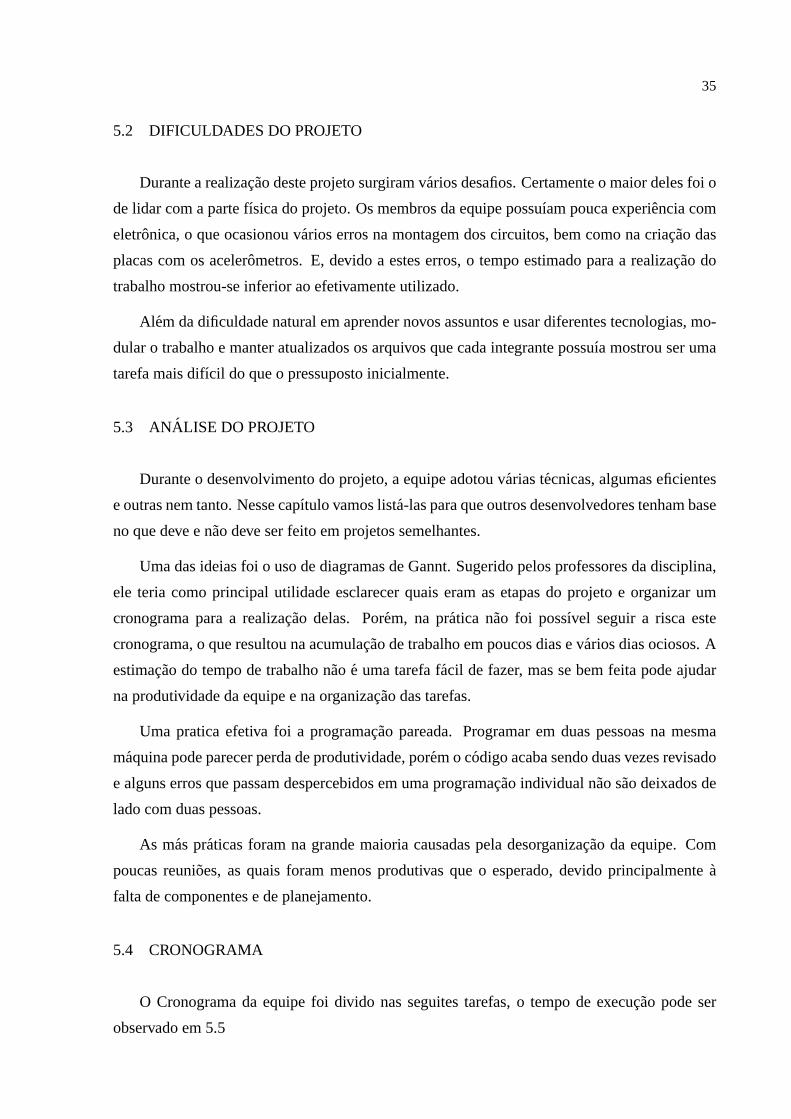
Ja a Figura 10 mostra o esquematico da placa contendo o Arduino e o multiplexador, bem
como as saıdas para os acelerometros e para o cabo MIDI. Nela, pode-se observar que os o
sinal SDA sai do Arduino (ANALOGIN) e e ligado ao multiplexador(INPUT), que atraves
dos sinais S0 e S1, redirecionarao o sinal para o acelerometro adequado(ACEL1, ACEL2 ou
ACEL3). Tambem nota-se que o SCLe o mesmo para todos os sensores e que os sinais de
interrupcao INT1, INT2 e INT3 sao ligados diretamente ao Arduino. A saıda MIDI se da
atraves de uma porta digital do Arduino e as demais ligacoes serao apenas o VCC e o GND,
conforme o esquematico. MULTI1 e INPUT referem-se ao multiplexador;ANALOGIN,
POWER, DIGITAL 1 e DIGITAL 2 referem-se ao Arduino.MIDI −OUT e a saıda para o
cabo MIDI.

33
Figura 10: Esquematico da placa contendo o Arduino e o multiplexador

34
5 RESULTADOS E DISCUSSAO
5.1 RESULTADOS OBTIDOS
Em geral, com varios requisitos cumpridos, a equipe obteve resultados positivos na realizacao
deste trabalho. O projeto conta com os acelerometros fixos em uma superfıcie de madeira e con-
figurados para o modo de deteccao de pulso, de forma que foi possıvel mapear a superfıcie. Uma
vez com a superfıcie mapeada,e possıvel tocar o instrumento. Para identificar qual regiao da
superfıcie produzira determinada nota musical, pequenas marcacoes na madeira foram feitas.
Fui criado um programa especialmente para realizar o mapeamento da superfıcie, de formaa
tornar o sistema facilmente adaptavel para outros tipos de superfıcies.
Durante a realizacao deste mapeamento, percebeu-se que os dados coletados eram muito
discrepantes. Nao apenas o intervalo de tempo de resposta entre um acelerometro e outro, mas
tambem a ordem com que eles identificavam o pulso variavam mesmo com a origem da vibracao
sendo a mesma. Este problema deve-se ao fato de que pode ocorrer um atraso de ate 1,6ms na
identificacao de um pulso por parte dos acelerometros e neste tempo, a onda ja teria percorrido
a superfıcie inteira (FREESCALE, 2009). Alem disso, o microcontrolador demora um tempo
para verificar qual pino foi acionado, isso tambem contribui para este problema.
O grupo adquiriu um conhecimento notavel sobre conceitos de sismologia para identifi-
car o epicentro das vibracoes e o comportamento de ondas mecanicas em diferentes tipos de
materiais, o que formou a base para a concepcao do artefato. Alem disto, compreendemos o
funcionamento do acelerometro (modelo MMA7456L da marca Freescale Semiconductor)e
seus diferentes modos de operacao; bem como estudamos o protocolo de comunicacao I2C e o
formato deaudio MIDI e aprendemos a utilizar um microcontrolador, em especial, o Arduino
Duemilanove, para controlar os sensores.
35
5.2 DIFICULDADES DO PROJETO
Durante a realizacao deste projeto surgiram varios desafios. Certamente o maior deles foi o
de lidar com a parte fısica do projeto. Os membros da equipe possuıam pouca experiencia com
eletronica, o que ocasionou varios erros na montagem dos circuitos, bem como na criacao das
placas com os acelerometros. E, devido a estes erros, o tempo estimado para a realizacao do
trabalho mostrou-se inferior ao efetivamente utilizado.
Al em da dificuldade natural em aprender novos assuntos e usar diferentes tecnologias, mo-
dular o trabalho e manter atualizados os arquivos que cada integrante possuıa mostrou ser uma
tarefa mais difıcil do que o pressuposto inicialmente.
5.3 ANALISE DO PROJETO
Durante o desenvolvimento do projeto, a equipe adotou varias tecnicas, algumas eficientes
e outras nem tanto. Nesse capıtulo vamos lista-las para que outros desenvolvedores tenham base
no que deve e nao deve ser feito em projetos semelhantes.
Uma das ideias foi o uso de diagramas de Gannt. Sugerido pelosprofessores da disciplina,
ele teria como principal utilidade esclarecer quais eram asetapas do projeto e organizar um
cronograma para a realizacao delas. Porem, na pratica nao foi possıvel seguir a risca este
cronograma, o que resultou na acumulacao de trabalho em poucos dias e varios dias ociosos. A
estimacao do tempo de trabalho nao e uma tarefa facil de fazer, mas se bem feita pode ajudar
na produtividade da equipe e na organizacao das tarefas.
Uma pratica efetiva foi a programacao pareada. Programar em duas pessoas na mesma
maquina pode parecer perda de produtividade, porem o codigo acaba sendo duas vezes revisado
e alguns erros que passam despercebidos em uma programacao individual nao sao deixados de
lado com duas pessoas.
As mas praticas foram na grande maioria causadas pela desorganizacao da equipe. Com
poucas reunioes, as quais foram menos produtivas que o esperado, devido principalmentea
falta de componentes e de planejamento.
5.4 CRONOGRAMA
O Cronograma da equipe foi divido nas seguites tarefas, o tempo de execucao pode ser
observado em 5.5

36
1. Definicao da equipe, projeto e orientador: Durante uma semana foramdefinidos os inte-
grantes da equipe, a proposta de projeto e escolhido um orientador
2. Estudo do material sobre acelerometros, vibracoes e materiais: A equipe realizou um
estudo das possibilidades de sensores e microcontroladores. Apos a escolha, realizou um
estudo especıfico sobre cada componente analizandodatasheetse documentosonline. Foi
feito um estudo sobre vibracoes e a escolha do material para a base do instrumento.
3. Estudo da programacao do microcontrolador e o protocolo I2C: A equipe concentrou-se
em aprender o funcionamento do protocolo I2C e suas biblitecas para o microcontrolador
Arduino
4. Acoplamento de um acelerometro ao microcontrolador: Foi feita a conexao de um ace-
lerometro ao Arduino para a identificacao dos diferentes modos de deteccao disponıveis
no acelerometro MMA7456L
5. Estudo da utilizacao de mais de um acelerometro, estudo do multiplexador: Para a co-
nexao do Arduino a mais de um processador foi encontrada grande dificuldade de comunicacao,
para resolucao deste problema foi feito um estudo sobre o uso do multiplexador que aca-
bou sendo acoplado ao circuito final
6. Escrita da monografia e documentos intermediarios: Escrita e pesquisa para o relatorio
de qualificacao
7. Desenvolvimento do software para saıda MIDI: Escrita do codigo para a geracao de saıda
MIDI baseado em exemplos da documentacao do Arduino
8. Montagem circuito final e esquematicos: Decisoes sobre o circuito final, soldagem e
desenho dos esquematicos
9. Escrita do software para calibracao: Escrita do codigo para gravar e ler na EEPROM do
microcontrolador, assim como as condicoes para detectar diferentes notas
10. Calibragem: Testes e adaptacoes no codigo final
11. Escrita da monografia final
5.5 DIAGRAMA DE GANTT
O Diagrama de Gantte um tipo de grafico em barras que tem como proposito organizar
um cronograma. Nelee possıvel visualizar a realizacao de tarefas ao longo do tempo. Com o

37
objetivo de se organizar melhor e tracar metas, a equipe criou um diagrama de Gantt. Anali-
sando o grafico, podem-se observar varias tarefas foram realizadas simultaneamente, ja que o
trabalho foi dividido entre os membros da equipe. Apesar de na pratica o cronograma nao ter
sido cumprido fielmente, ele foi muito importante para a organizacao da equipe.

38
Diagrama de Gantt:
Diagrama de Gantt:
Figura 11: Diagrama de Gantt
39
6 CONCLUSAO
Apos obter uma quantidade consideravel de informacoes sobre os assuntos abrangentes
ao projeto e, com base nelas, criar o artefato, concluımos quee possıvel sim construir um
instrumento musical com base na deteccao de pulsos de ondas mecanicas em uma superfıcie
utilizando acelerometros.
Apesar do sistema possuir algumas limitacoes, como a dificuldade para tocar musicas mais
complexas e a falta de precisao na identificacao das notas, ainda assim, mostrou-se como um
forma diferente de produzir musica. Com a utilizacao da saıda deaudio MIDI, e total inde-
pendencia de um microcomputador, o instrumentoe portatil e pode ser utilizado de diversas
formas.
O principal resultado para a equipe foi o conhecimento adquirido na realizacao de um ex-
tenso trabalho em equipe. Varias foram as dificuldades: fazer um trabalho cientıfico; realizar
pesquisas em artigos, teses, dissertacoes; lidar com prazos de entrega; escrever de maneira es-
truturada e seguindo padroes; criar uma hipotese e tentar prova-la. Alem das dificuldades de
implementacao do software e hardware, estaultima em especial devido a pouca experiencia dos
integrantes. Tudo isso foi uma grande e nova experiencia para a equipe.
6.1 PROJETOS FUTUROS
Durante a realizacao deste trabalho, varias ideias para projetos futuros surgiram. Dentre
elas destacam-se:
• Tornar o sistema adaptavel para qualquer tipo de superfıcie.
• Medir tambem a intensidade das batidas, as quais podem ser usadas para modificar a
intensidade (volume) das notas.
• Adicionar potenciometros e outros sensores de forma a mudar o som (frequencia, timbre
etc.)

40
• Implementar um teclado “analogico” e nao discretizado em teclas virtuais, gerando as
notas diretamente dos tempos medidos.

41
REFERENCIAS
ARDUINO. Disponıvel em:<http://www.arduino.cc/>. Acesso em: 26 de setembro
de 2010.
ARDUINO BRASIL. Protocolo I2C, uma breve descricao! Disponıvel em: <http://
arduinobrasil.blogspot.com/2010/01/protocolo-i2c-uma-breve-descricao.
html>. Acesso em: 26 de setembro de 2010.
BHATTI, K. R. Mechanical Vibration . Nawabshah, 2010.
COLWELL, Bob; What Technology Is Doing to Music. Artigo. Revista Random, Julho
2002.
DOURADO, J. C.Ondas sısmicas. Notas de aula. Universidade Estadual Paulista, Rio Claro,
2001.
FILHO, Roberto Paulo D. ELETRONICA.ORG.Protocolo de Comunicacao I2C. Disponıvel
em:<http://www.eletronica.org/modules.php?name=Newsfile=printsid=
13>. Acesso em: 26 de setembro de 2010.
FREESCALE SEMICONDUCTOR.MMA7456L: Technical Data. Datasheet, 2009.
GISCH, David; RIBANDO, Jason M.Appolonius’ Problem: A Study of Solutions and Their
Connections. University Nothern Iowa. Cedar Falls, Iowa, 2004.
GOMES, Douglas W; SANTOS, Roniclei G. dos; QUINTINO, Maurıcio V.; BRANDAO, Gus-
tavo W.; ARRUDA, Christian.Acelerometro. Caxias do Sul: Universidade de Caxias do Sul,
2007.
HALLIDAY, D.; RESNICK, R.; WALKER J.Fundamentos de Fısica 2: Gravitacao, Ondas e
Termodinamica. 4a ed. Rio de Janeiro: Livros Tecnicos e Cientıficos Editora SA, 1996. 288 p.

42
MAGALH AES, D.V. Extensometria e Sensores de Aceleracao. Notas de Aula. Sao Paulo:
Universidade de Sao Paulo. Disponıvel em:<http://www.mecatronica.eesc.usp.
br/wiki/upload/c/ca/SEM0539_AulaLab3.pdf>. Acesso em: 26 de setembro de
2010.
MIDI Manufacturer’s Association.The MIDI Specification. Documento tecnico, 2006. Dis-
ponıvel em<http://www.oktopus.hu/imgs/MANAGED/Hangtechnikai_tudastar/
The_MIDI_Specification.pdf>. Acesso em: 14 de novembro de 2010.
MOELANDS, Adrianus P. M. M.; SCHUTTE, Herman.Two-wire bus-system comprising
a clock wire and a data wire for interconnecting a number of stations. Patente numero
4689740, 1987. Disponıvel em:<http://www.freepatentsonline.com/4689740.
html>. Acesso em: 26 de setembro de 2010.
PIUBELLI, S. L.; ERROBIDART, H. A.; GOBARA, S. T.; ERROBIDART, N. C. G. Simu-
lador de propagacao de ondas mecanicas em meios solidos para o ensino da fısica. Revista
Brasileira de Ensino de Fısica, v. 32, n. 1, 1501, 2010.
REIDEMEISTER, Eric P.; KAWATE, Keith W.Capacitance accelerometer. Patente numero
5092174, 1992. Disponıvel em:<http://www.freepatentsonline.com/5092174.
html>. Acesso em: 26 de setembro de 2010.
SANTIAGO, Felipe M.Adicao de Protocolos de Comunicacao a um Microcontrolador
basico. Itajaı: Universidade do Vale do Itajaı, 2009.
Texas Instruments.High-Speed CMOS Logic 16-Channel Analog Multiplexer/Demultiplexer.
Datasheet, 2003.
SIM, Robert. Mobile Robot Localization from Learned Landmarks . Tese de mestrado.
McGill University. Montreal, Canada, 1998.
THOMAS, Federico; Ros, Lluıs. Revisiting Trilateration for Robot Localization . Artigo
publicado em IEEE TRANSACTIONS ON ROBOTICS, VOL. 21, NO. 1, 2005.

43
WU, Ming C. Case Study I: Capacitive Accelerometers. Los Angeles, California: UCLA:
Electrical Engineering Department.
YU, Yibin; Wang, Gui; LI, Zuoquan; LI, Changbing;Alternating Combination Trilatera-
tion for Unknown Nodes of Sensor Networks. Artigo. 2007 IEEE International Conference
on Control and Automation. Guangzhou, CHINA, 2007.