vector calculus in polar, cylindrical, and spherical ...mucc.mahidol.ac.th/~egpcp/handout200/vector...
TRANSCRIPT
Vector Calculus in Polar, Cylindrical, and Spherical CoordinatesPraveen Chompreda, Ph.D. | Mahidol University
The vector calculus we have learnt so far are in Cartesian Coordinate (x,y,z). Most of the things we've done can also be done in the polar, cylindrical, and
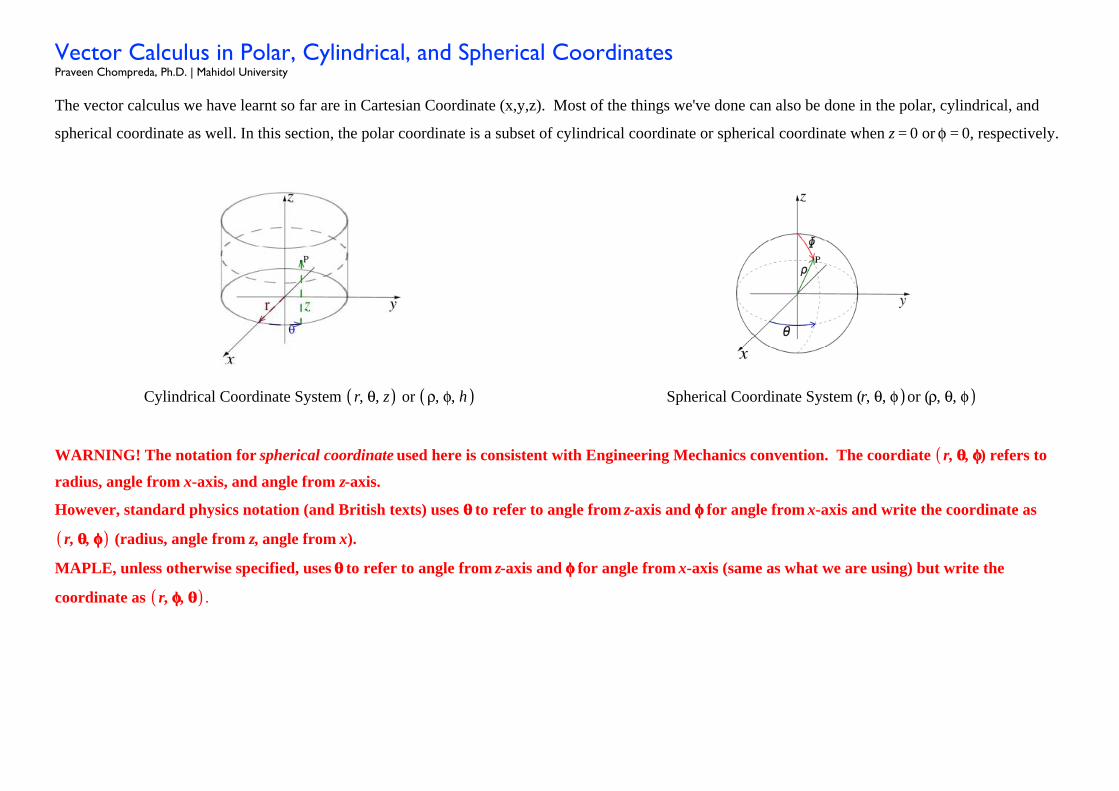
spherical coordinate as well. In this section, the polar coordinate is a subset of cylindrical coordinate or spherical coordinate when z = 0 or = 0, respectively.
Cylindrical Coordinate System r, , z or , , h Spherical Coordinate System (r, , or ( , ,
WARNING! The notation for spherical coordinate used here is consistent with Engineering Mechanics convention. The coordiate r, , ) refers to
radius, angle from x-axis, and angle from z-axis.
However, standard physics notation (and British texts) uses to refer to angle from z-axis and for angle from x-axis and write the coordinate as
r, , (radius, angle from z, angle from x).
MAPLE, unless otherwise specified, uses to refer to angle from z-axis and for angle from x-axis (same as what we are using) but write the
coordinate as r, , .
1. SPACE CURVE
1.1 Representation of Curve
A Curve can be represented by many ways such as a parametric equation, nonparametric equation as projections on the surfaces, and as nonparametric equationas intersections of two surfaces.
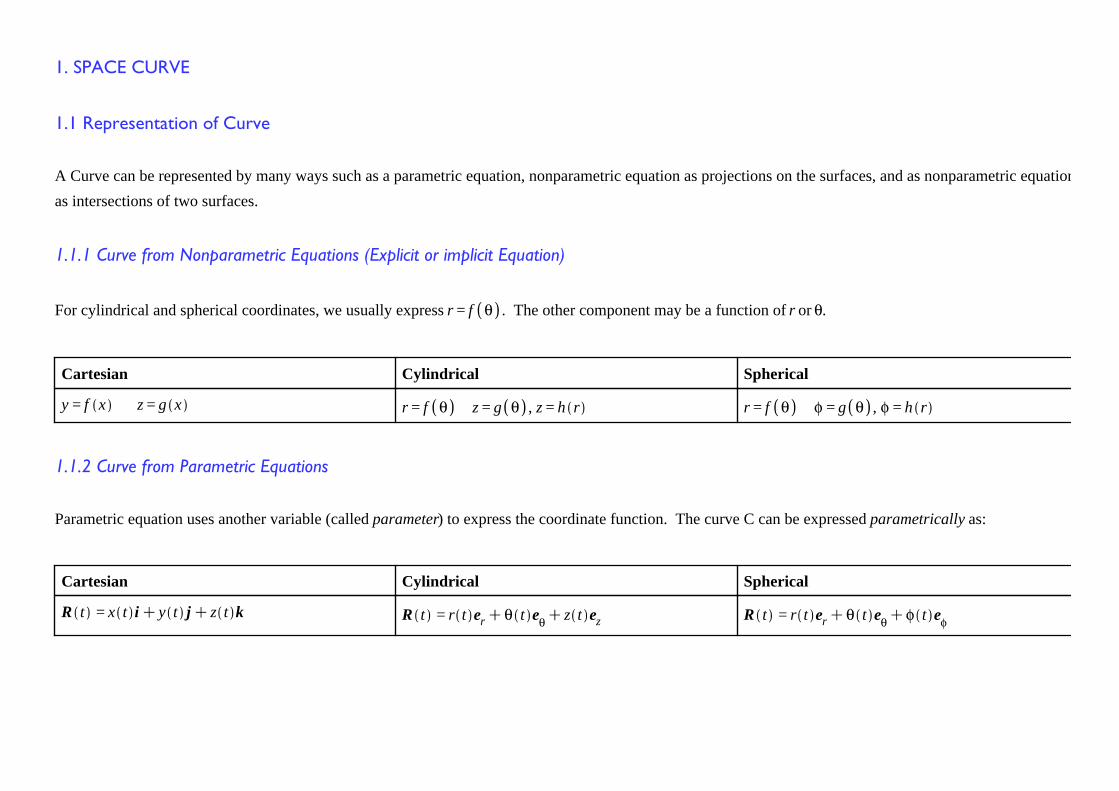
1.1.1 Curve from Nonparametric Equations (Explicit or implicit Equation)
For cylindrical and spherical coordinates, we usually express r = f . The other component may be a function of r or .
Cartesian Cylindrical Spherical
y = f x z = g x r = f z = g , z = h r r = f = g , = h r
1.1.2 Curve from Parametric Equations
Parametric equation uses another variable (called parameter) to express the coordinate function. The curve C can be expressed parametrically as:
Cartesian Cylindrical Spherical
R t = x t i y t j z t k R t = r t er t e z t ez R t = r t er t e t e
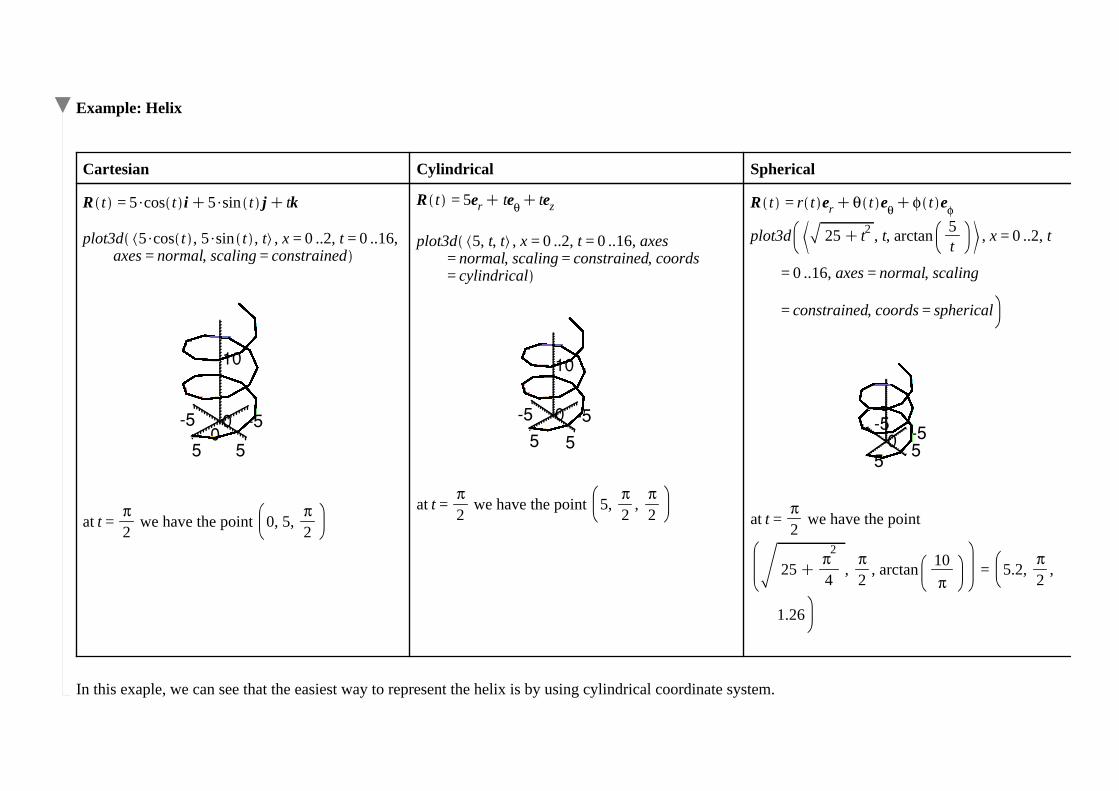
Example: Helix
Cartesian Cylindrical Spherical
R t = 5 cos t i 5 sin t j tk
plot3d 5 cos t , 5 sin t , t , x = 0 ..2, t = 0 ..16, axes = normal, scaling = constrained
−5 −500
5 5
10
at t =2
we have the point 0, 5,2
R t = 5er te tez
plot3d 5, t, t , x = 0 ..2, t = 0 ..16, axes= normal, scaling = constrained, coords= cylindrical
−5 −50
5 5
10
at t =2
we have the point 5,2
,2
R t = r t er t e t e
plot3d 25 t2 , t, arctan 5t
, x = 0 ..2, t
= 0 ..16, axes = normal, scaling
= constrained, coords = spherical
−5 −50 55
at t =2
we have the point
252
4,
2, arctan 10 = 5.2,
2,
1.26
In this exaple, we can see that the easiest way to represent the helix is by using cylindrical coordinate system.
2. SURFACE
2.1 Representation of Surface
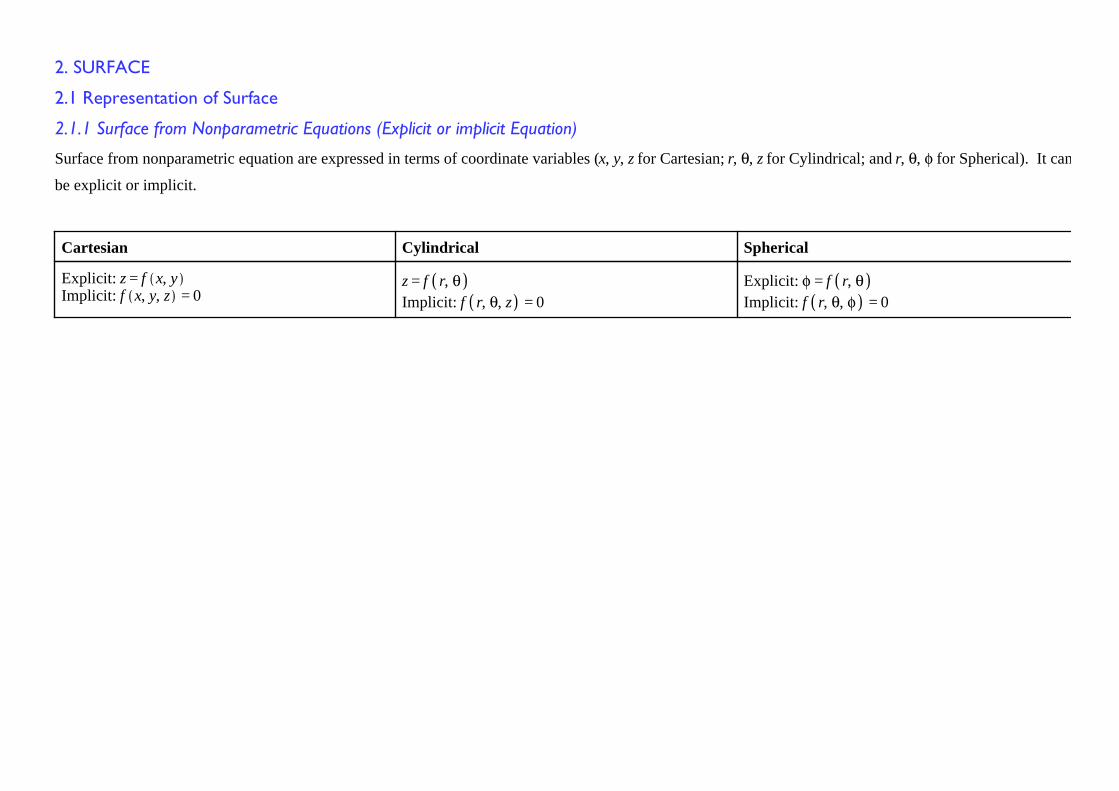
2.1.1 Surface from Nonparametric Equations (Explicit or implicit Equation)
Surface from nonparametric equation are expressed in terms of coordinate variables (x, y, z for Cartesian; r, , z for Cylindrical; and r, , for Spherical). It can
be explicit or implicit.
Cartesian Cylindrical Spherical
Explicit: z = f x, yImplicit: f x, y, z = 0
z = f r,Implicit: f r, , z = 0
Explicit: = f r,Implicit: f r, , = 0
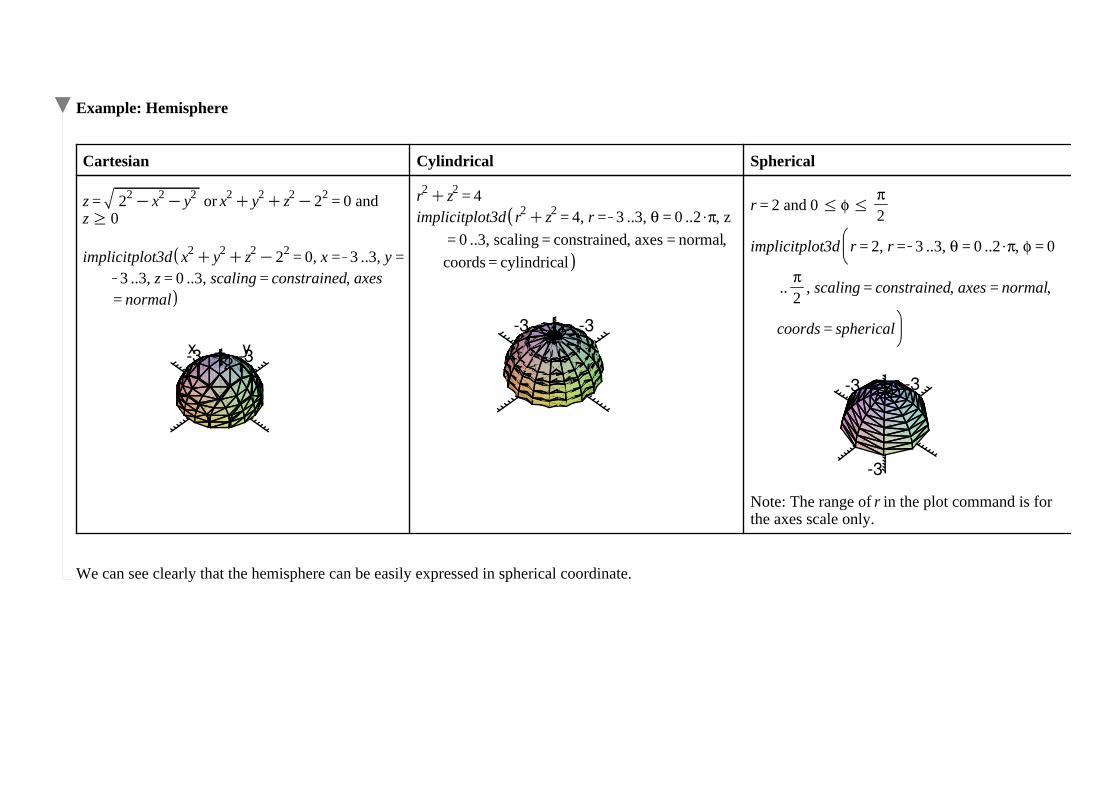
Example: Hemisphere
Cartesian Cylindrical Spherical
z = 22 x2 y2 or x2 y2 z2 22 = 0 and z 0
implicitplot3d x2 y2 z2 22 = 0, x = 3 ..3, y =3 ..3, z = 0 ..3, scaling = constrained, axes
= normal
x y−3 −3
01 1
z2
r2 z2 = 4implicitplot3d r2 z2 = 4, r = 3 ..3, = 0 ..2 , z
= 0 ..3, scaling = constrained, axes = normal,coords = cylindrical
−3 −3
0 11
2
r = 2 and 0 2
implicitplot3d r = 2, r = 3 ..3, = 0 ..2 , = 0
..2
, scaling = constrained, axes = normal,
coords = spherical
−3
−3−3
111
Note: The range of r in the plot command is for the axes scale only.
We can see clearly that the hemisphere can be easily expressed in spherical coordinate.
2.1.2 Surface from Parametric EquationsSimilar to a curve, a surface in a 3-space can be represented by a parametric equation. For surface, we need 2 variables (called u and v) instead of just one (t ain the case of curve.
Cartesian Cylindrical Spherical
R u, v = x u, v i y u, v j z u, v k R u, v = r u, v er u, v e z u, v ez R u, v = r u, v er u, v e u, v e
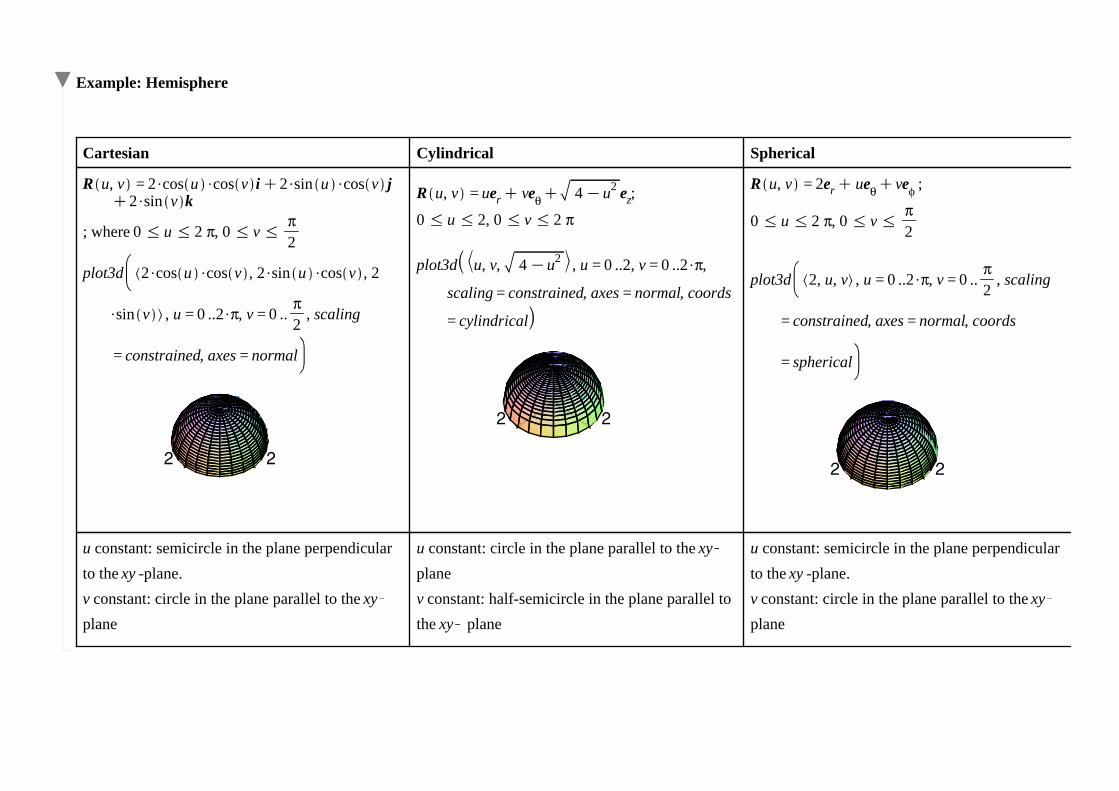
Example: Hemisphere
Cartesian Cylindrical Spherical
R u, v = 2 cos u cos v i 2 sin u cos v j2 sin v k
; where 0 u 2 , 0 v2
plot3d 2 cos u cos v , 2 sin u cos v , 2
sin v , u = 0 ..2 , v = 0 ..2
, scaling
= constrained, axes = normal
−2 −2
02 2
2
R u, v = uer ve 4 u2 ez;
0 u 2, 0 v 2
plot3d u, v, 4 u2 , u = 0 ..2, v = 0 ..2 ,
scaling = constrained, axes = normal, coords
= cylindrical
−2 −2
02 2
2
R u, v = 2er ue ve ;
0 u 2 , 0 v2
plot3d 2, u, v , u = 0 ..2 , v = 0 ..2
, scaling
= constrained, axes = normal, coords
= spherical
−2 −2
02 2
2
u constant: semicircle in the plane perpendicular to the xy -plane.v constant: circle in the plane parallel to the xy plane
u constant: circle in the plane parallel to the xy planev constant: half-semicircle in the plane parallel to the xy plane
u constant: semicircle in the plane perpendicular to the xy -plane.v constant: circle in the plane parallel to the xy plane
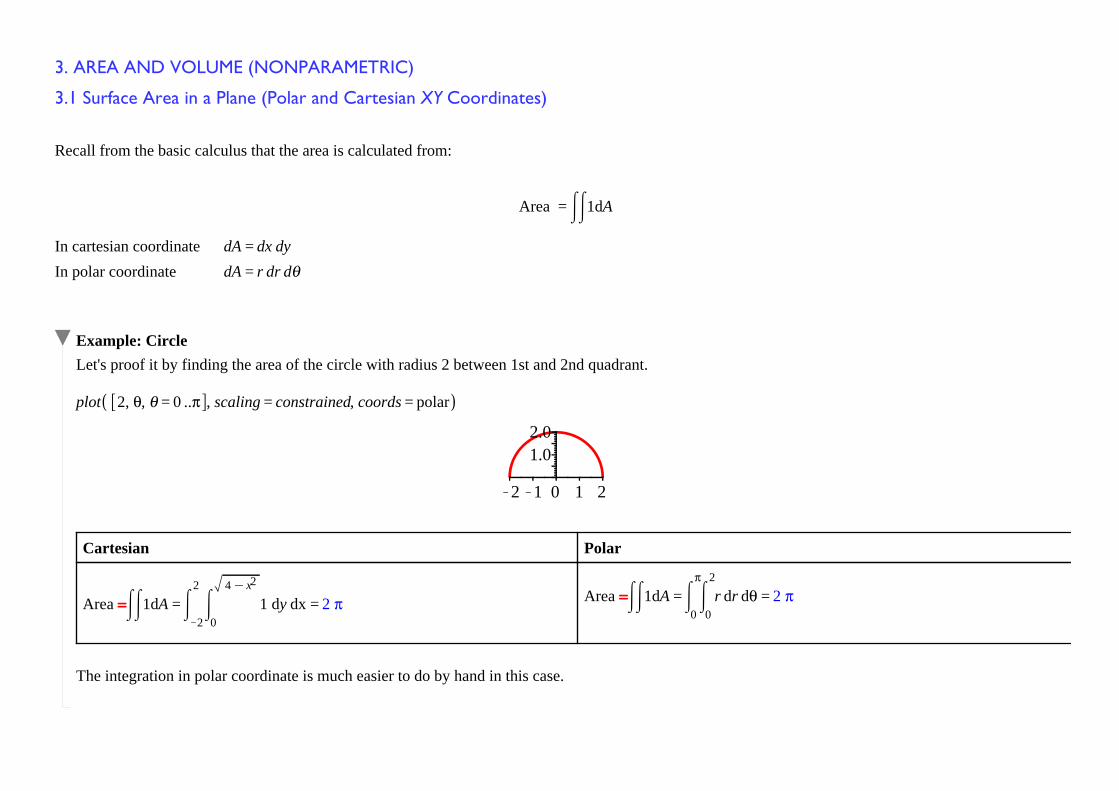
3. AREA AND VOLUME (NONPARAMETRIC)
3.1 Surface Area in a Plane (Polar and Cartesian XY Coordinates)
Recall from the basic calculus that the area is calculated from:
Area = 1dA
In cartesian coordinate dA = dx dyIn polar coordinate dA = r dr d
Example: CircleLet's proof it by finding the area of the circle with radius 2 between 1st and 2nd quadrant.
plot 2, , = 0 .. , scaling = constrained, coords = polar
2 1 0 1 2
1.02.0
Cartesian Polar
Area = 1dA =2
2
0
4 x2
1 dy dx = 2 Area = 1dA =0 0
2
r dr d = 2
The integration in polar coordinate is much easier to do by hand in this case.
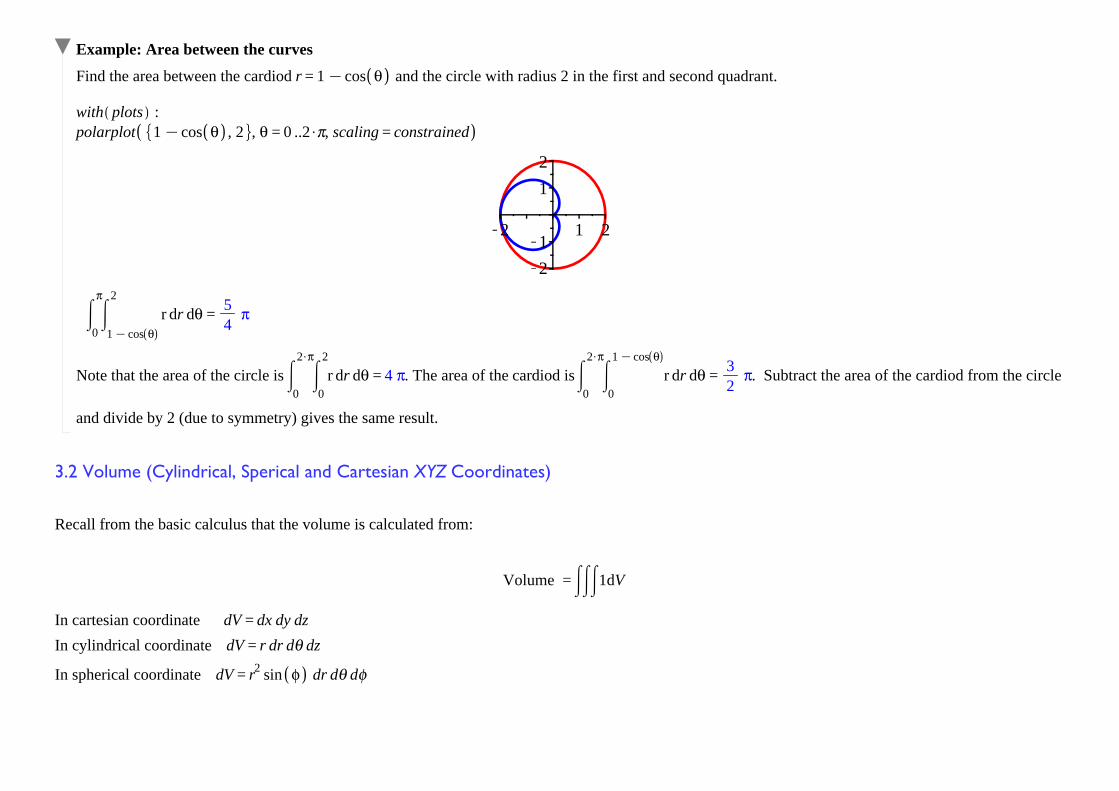
Example: Area between the curves
Find the area between the cardiod r = 1 cos and the circle with radius 2 in the first and second quadrant.
with plots :polarplot 1 cos , 2 , = 0 ..2 , scaling = constrained
2 1 2
21
12
0 1 cos
2
r dr d = 54
Note that the area of the circle is 0
2
0
2
r dr d = 4 . The area of the cardiod is 0
2
0
1 cos
r dr d = 32
. Subtract the area of the cardiod from the circle
and divide by 2 (due to symmetry) gives the same result.
3.2 Volume (Cylindrical, Sperical and Cartesian XYZ Coordinates)
Recall from the basic calculus that the volume is calculated from:
Volume = 1dV
In cartesian coordinate dV = dx dy dzIn cylindrical coordinate dV = r dr d dz
In spherical coordinate dV = r2 sin dr d d
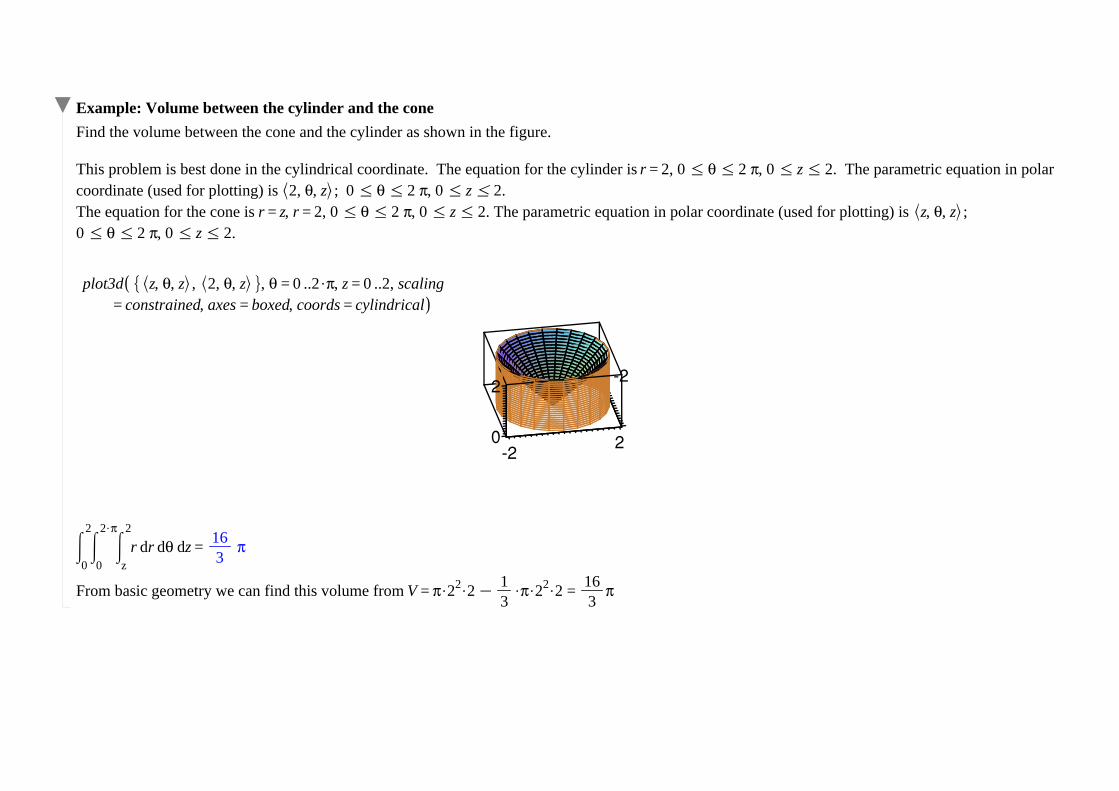
Example: Volume between the cylinder and the coneFind the volume between the cone and the cylinder as shown in the figure.
This problem is best done in the cylindrical coordinate. The equation for the cylinder is r = 2, 0 2 , 0 z 2. The parametric equation in polar coordinate (used for plotting) is 2, , z ; 0 2 , 0 z 2. The equation for the cone is r = z, r = 2, 0 2 , 0 z 2. The parametric equation in polar coordinate (used for plotting) is z, , z ; 0 2 , 0 z 2.
plot3d z, , z , 2, , z , = 0 ..2 , z = 0 ..2, scaling= constrained, axes = boxed, coords = cylindrical
−2
20−2
2
0
2
0
2
z
2
r dr d dz = 163
From basic geometry we can find this volume from V = 22 2 13
22 2 = 163
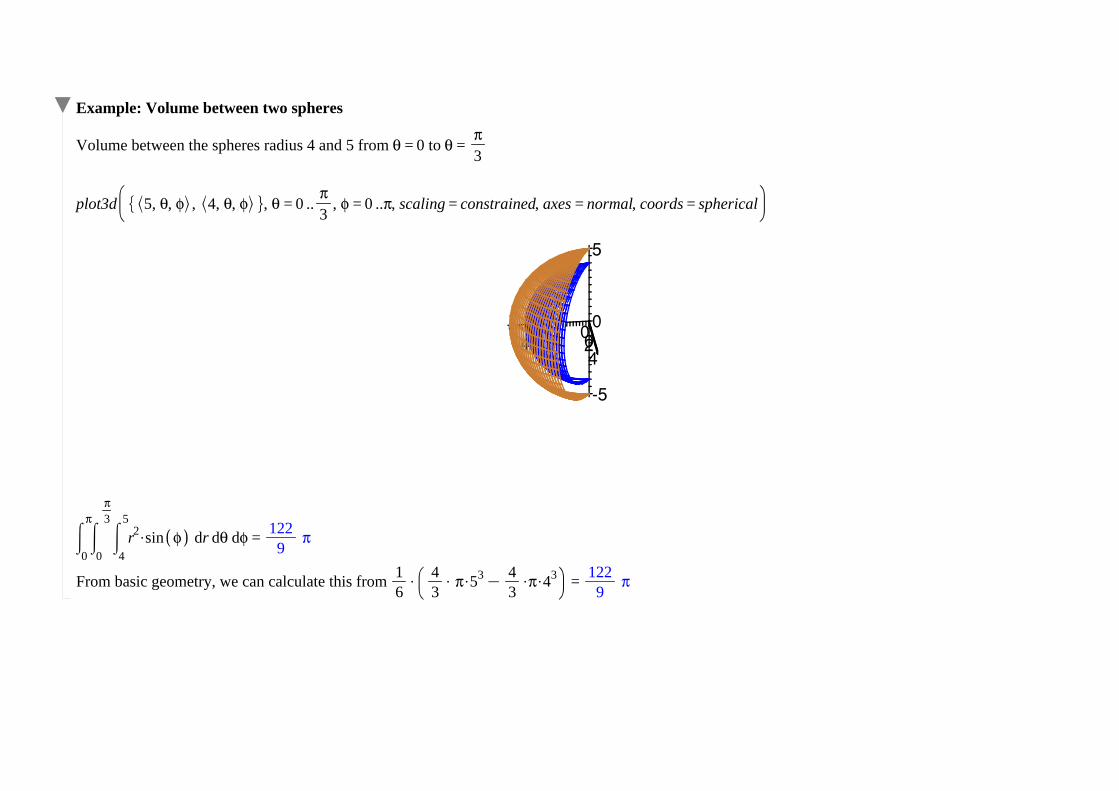
Example: Volume between two spheres
Volume between the spheres radius 4 and 5 from = 0 to =3
plot3d 5, , , 4, , , = 0 ..3
, = 0 .. , scaling = constrained, axes = normal, coords = spherical
−5
000
24 2
5
4
0 0
3
4
5
r2 sin dr d d = 1229
From basic geometry, we can calculate this from 16
43
53 43
43 = 1229

4. GRADIENT, DIVERGENCE, CURL
Like cartesian coordinate, there is also gradient, divergence, and curl in the cylindrical and spherical coordinate. The procedure is slightly different.
4.1 Scalar Field and Vector Field
The scalar field and vector field are defined similarly in the three coordinates.
Cartesian Cylindrical Spherical
Scalar Field:f x, y, z = 0
Scalar Field:f r, , z = 0
Scalar Field:f r, , = 0
Vector FieldF x, y, z = f x, y, z i g x, y, z j h x, y, z k
Vector FieldF r, , z = f r, , z er g r, , z e h r, ,
z ez
Vector FieldF r, , = f r, , er g r, , e h r, ,
e
(8.1
(8.2
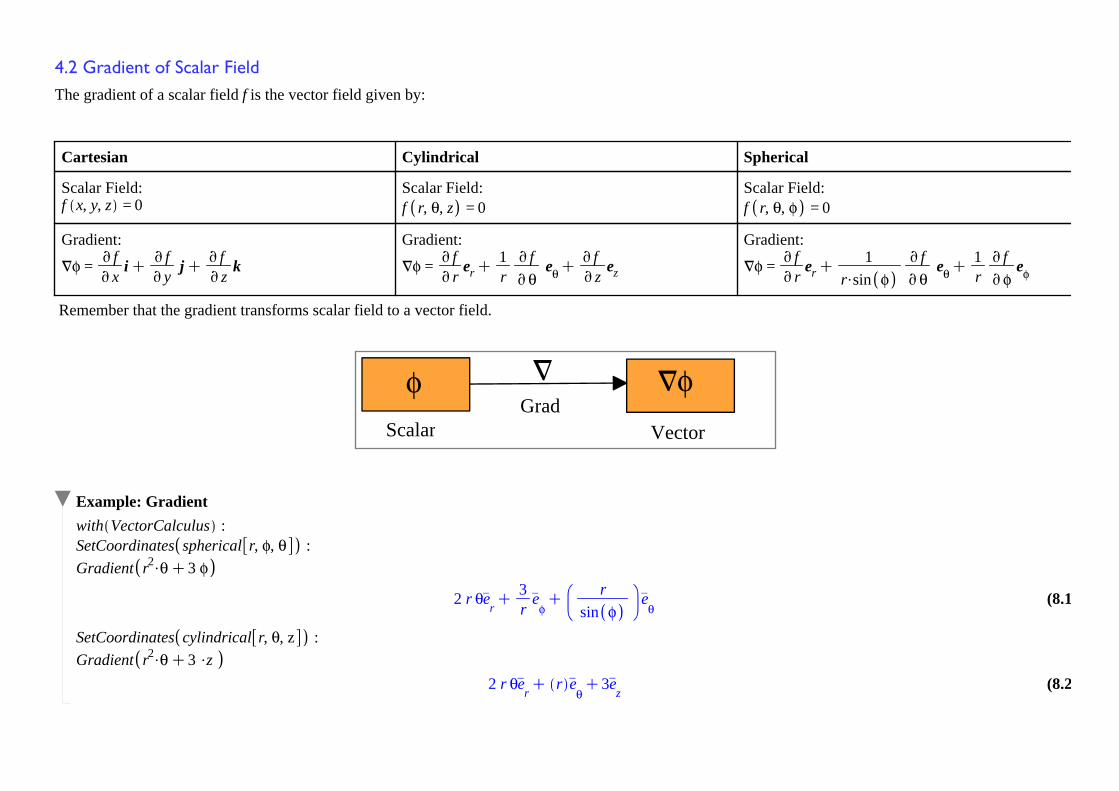
4.2 Gradient of Scalar FieldThe gradient of a scalar field f is the vector field given by:
Cartesian Cylindrical Spherical
Scalar Field:f x, y, z = 0
Scalar Field:f r, , z = 0
Scalar Field:f r, , = 0
Gradient:
= f x
i f y
j f z
k
Gradient:
= f r
er1r
f
e f z
ez
Gradient:
= f r
er1
r sin f
e 1r
f
e
Remember that the gradient transforms scalar field to a vector field.
Scalar VectorGrad
Example: Gradientwith VectorCalculus :SetCoordinates spherical r, , :Gradient r2 3
2 r e_
r3r
e_ r
sine_
SetCoordinates cylindrical r, , z :Gradient r2 3 z
2 r e_
rr e
_3e
_
z
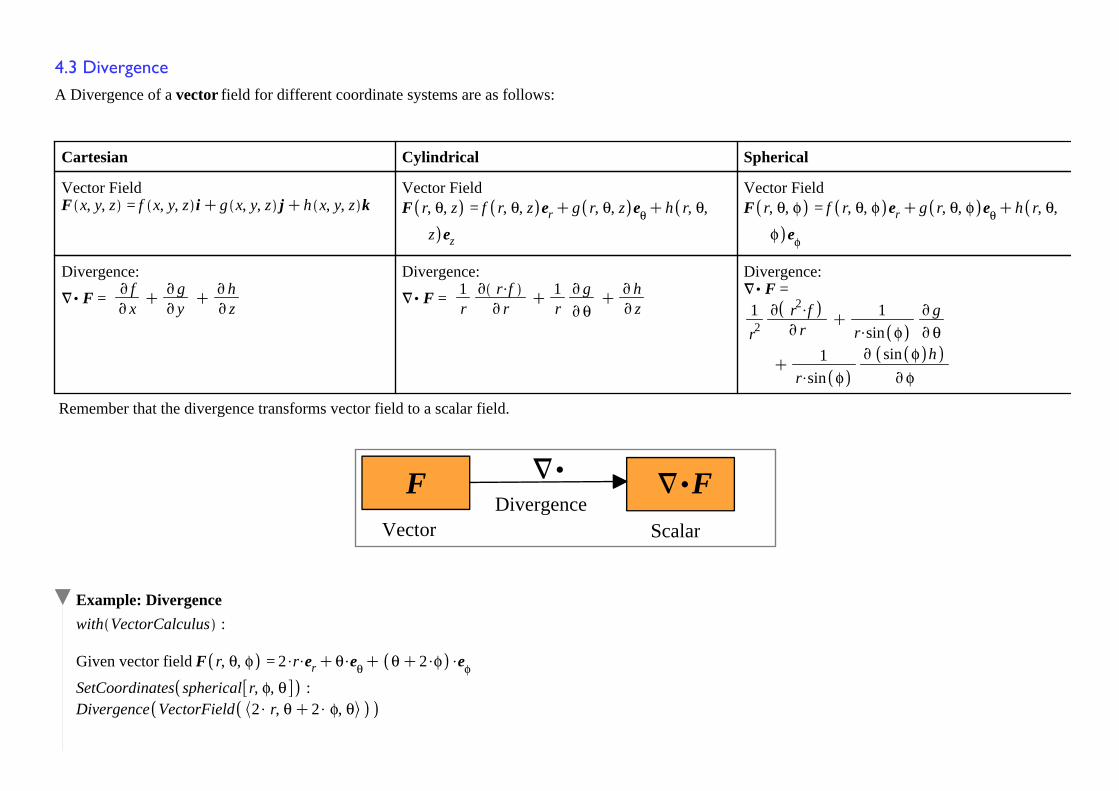
4.3 DivergenceA Divergence of a vector field for different coordinate systems are as follows:
Cartesian Cylindrical Spherical
Vector FieldF x, y, z = f x, y, z i g x, y, z j h x, y, z k
Vector FieldF r, , z = f r, , z er g r, , z e h r, ,
z ez
Vector FieldF r, , = f r, , er g r, , e h r, ,
e
Divergence:
F = f x
g y
h z
Divergence:
F = 1r
r f r
1r
g
h z
Divergence: F =
1r2
r2 f r
1r sin
g
1r sin
sin h
Remember that the divergence transforms vector field to a scalar field.
Scalar
F FDivergence
Vector
Example: Divergencewith VectorCalculus :
Given vector field F r, , = 2 r er e 2 e
SetCoordinates spherical r, , :Divergence VectorField 2 r, 2 ,
(9.1
(9.2
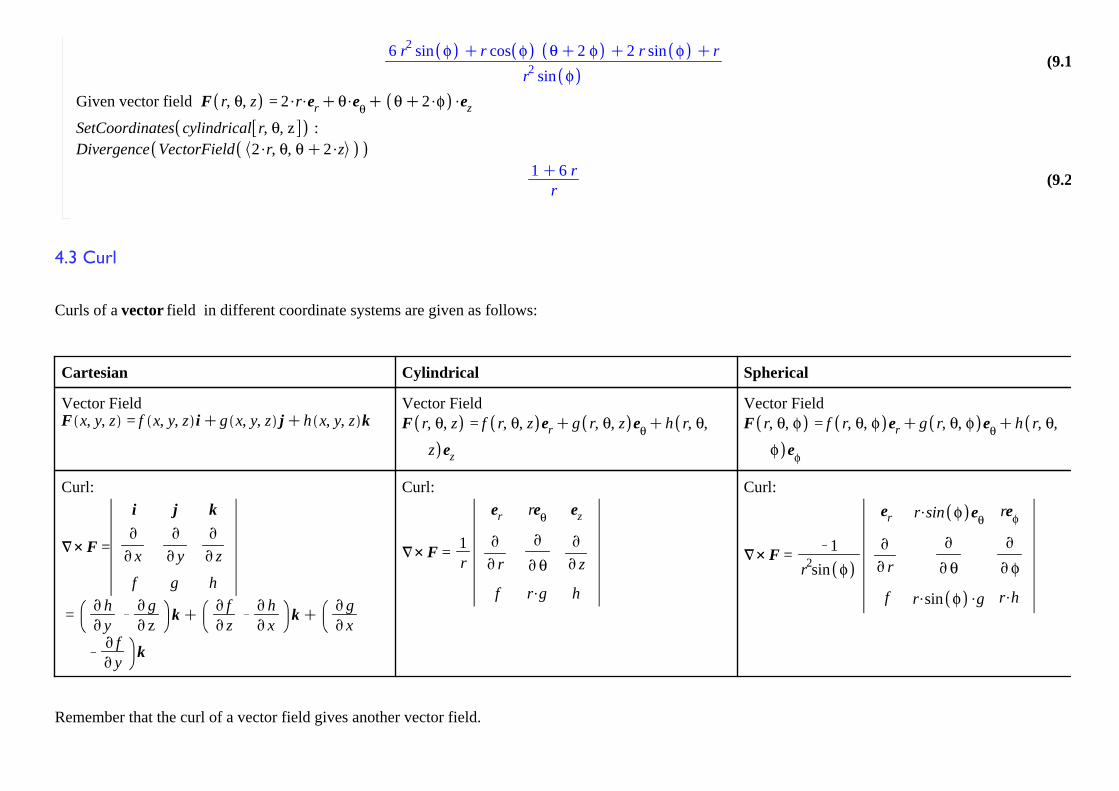
6 r2 sin r cos 2 2 r sin rr2 sin
Given vector field F r, , z = 2 r er e 2 ez
SetCoordinates cylindrical r, , z :Divergence VectorField 2 r, , 2 z
1 6 rr
4.3 Curl
Curls of a vector field in different coordinate systems are given as follows:
Cartesian Cylindrical Spherical
Vector FieldF x, y, z = f x, y, z i g x, y, z j h x, y, z k
Vector FieldF r, , z = f r, , z er g r, , z e h r, ,
z ez
Vector FieldF r, , = f r, , er g r, , e h r, ,
e
Curl:
F =
i j k
x
y z
f g h
= h y
g z
k f z
h x
k g x
f y
k
Curl:
F = 1r
er re ez
r
z
f r g h
Curl:
F = 1r2sin
er r sin e re
r
f r sin g r h
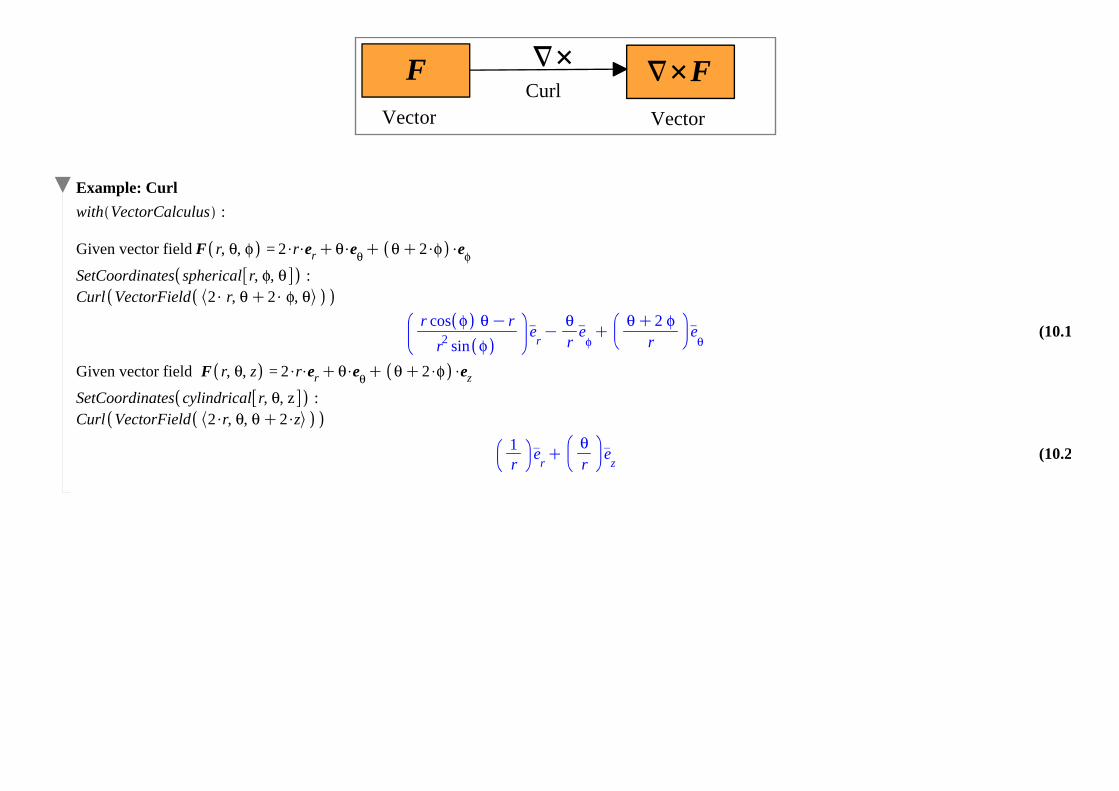
Remember that the curl of a vector field gives another vector field.
(10.1
(10.2
Vector
F FCurl
Vector
Example: Curlwith VectorCalculus :
Given vector field F r, , = 2 r er e 2 e
SetCoordinates spherical r, , :Curl VectorField 2 r, 2 ,
r cos rr2 sin
e_
r re_ 2
re_
Given vector field F r, , z = 2 r er e 2 ez
SetCoordinates cylindrical r, , z :Curl VectorField 2 r, , 2 z
1r
e_
r re_
z

4.4 Properties of Gradient, Divergence, and Curl
The following are true for any coordinate systems.
1. Curl of gradient is the zero vector: = 02. Divergence of a Curl is the number zero: F = 03. Let and be scalar fields and F and G are vector fields
=
F G = F G
F G = F G
=
F G = F G G F F G G F
F = F F
F G = G F F G
F = F F
F G = G F F G G F F G