vector in r2 and r3 - wordpress.com filepolar coordinate system •origin and reference line are...
TRANSCRIPT
Vector in R2 and R3
Review of Coordinate Systems
•Used to describe the position of a point in space
•Common coordinate systems are:
– Cartesian
– Polar
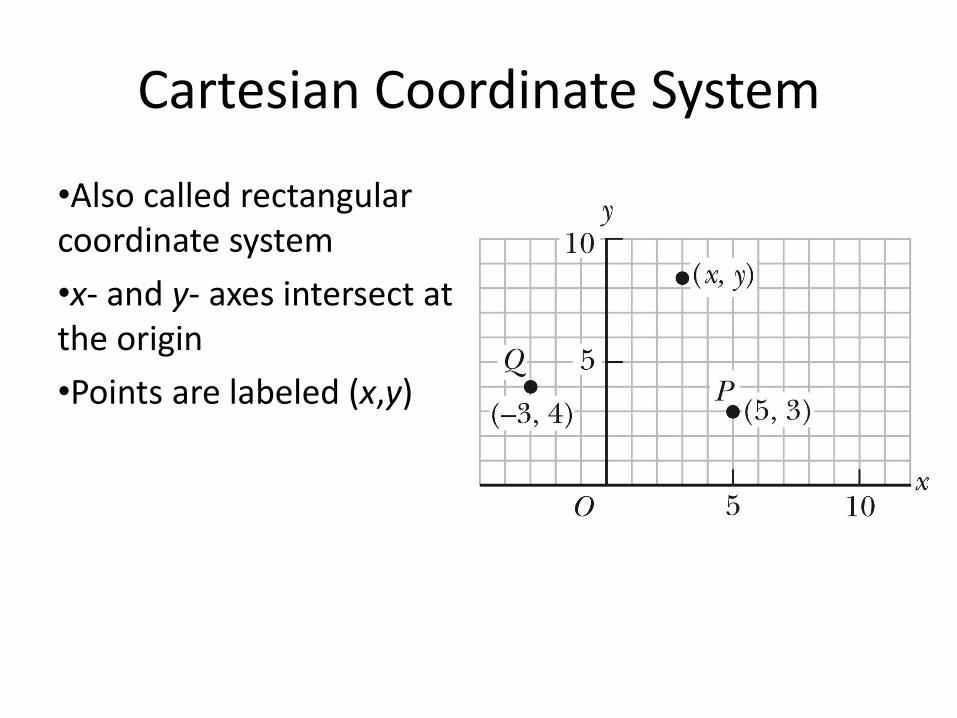
Cartesian Coordinate System
•Also called rectangular coordinate system
•x- and y- axes intersect at the origin
•Points are labeled (x,y)
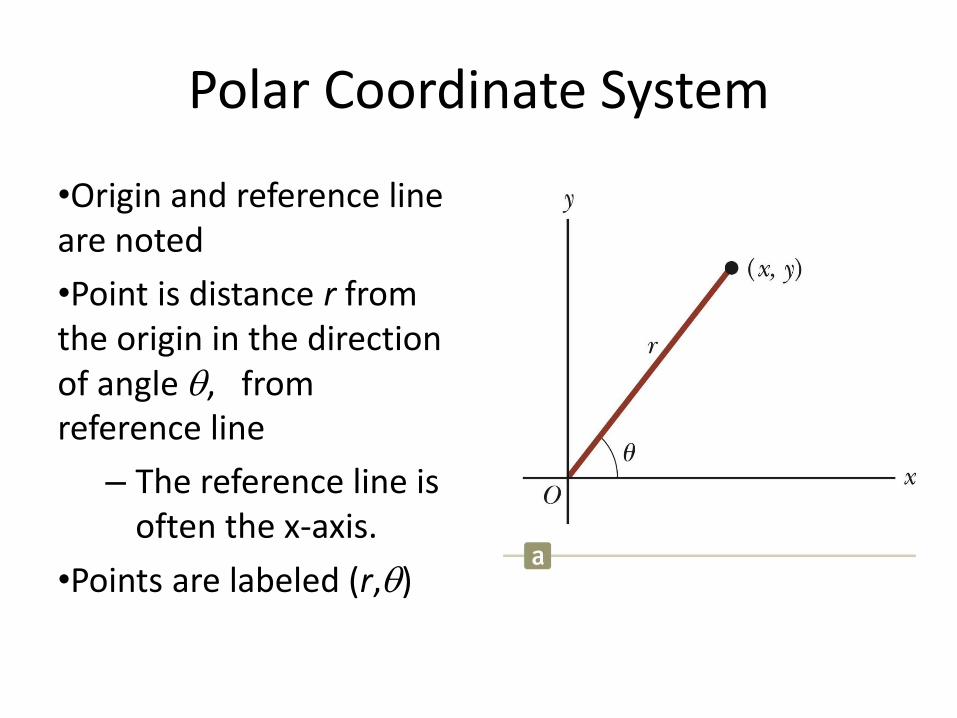
Polar Coordinate System
•Origin and reference line are noted
•Point is distance r from the origin in the direction of angle , from reference line
– The reference line is often the x-axis.
•Points are labeled (r,)
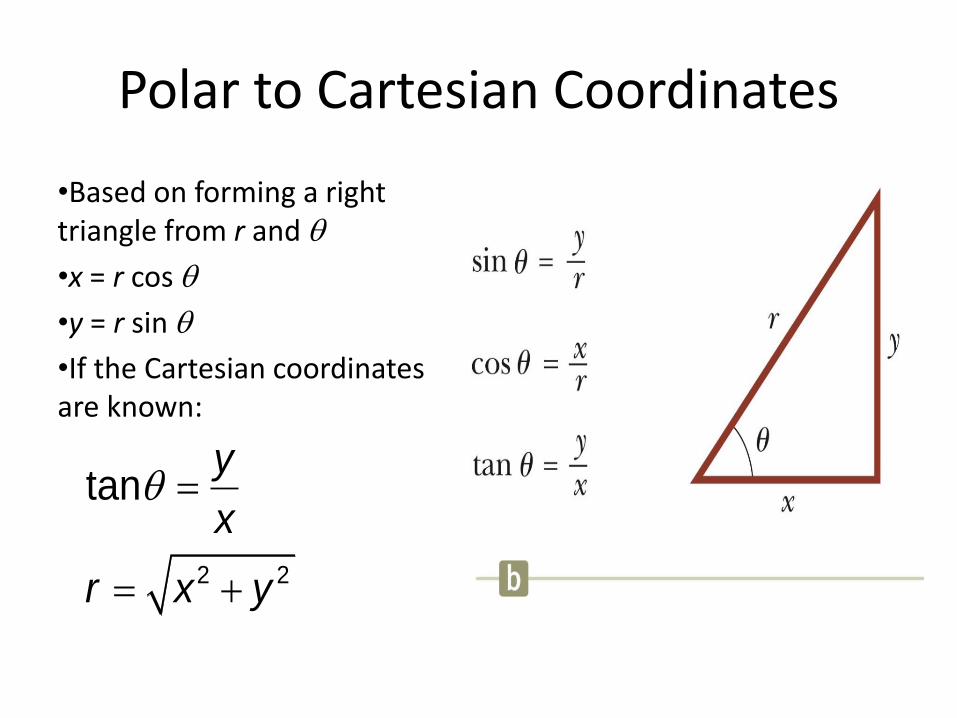
Polar to Cartesian Coordinates
•Based on forming a right triangle from r and
•x = r cos
•y = r sin
•If the Cartesian coordinates are known:
2 2
tany
x
r x y
Vectors in Two and Three
Dimensions
Algebraic and geometric
points of view
Algebraic Definitions
• A vector in R2 is an ordered pair of real numbers, e.g., (1,–3) or (π,√2). In general we write a = (a1, a2) for a vector in R2.
• A vector in R3 is an ordered triple of real numbers, e.g., (7,18,–9) or (e,0,–2). In general we write a = (a1, a2, a3) for a vector in R3.
Arithmetic Operation:
Vector Addition
• Add vectors in the same space by adding component-
wise.
• Examples
– (1, –3) + (5, 7) = (6, 4).
– (√2, 0, 1) + (–2, 5, –1) = (√2 – 2, 5, 0).
– (4, –1, 8) + (1, 2) is not defined.
• In general, if a = (a1, a2, a3) and b = (b1, b2, a3), then
a + b = (a1+b1, a2+b2, a3+b3). (Similar for vectors in R2.)
Arithmetic Operation:
Scalar Multiplication
• Multiply a vector by a single real number (called a
scalar) by multiplying the components of the
vector by that real number.
• Examples
3(1, 7) = (3, 21).
–2(1, 0, –3) = (–2, 0, 6).
• In general, if a = (a1, a2, a3) and k R, then
ka = (ka1, ka2, ka3). (Similar for vectors in R2.)
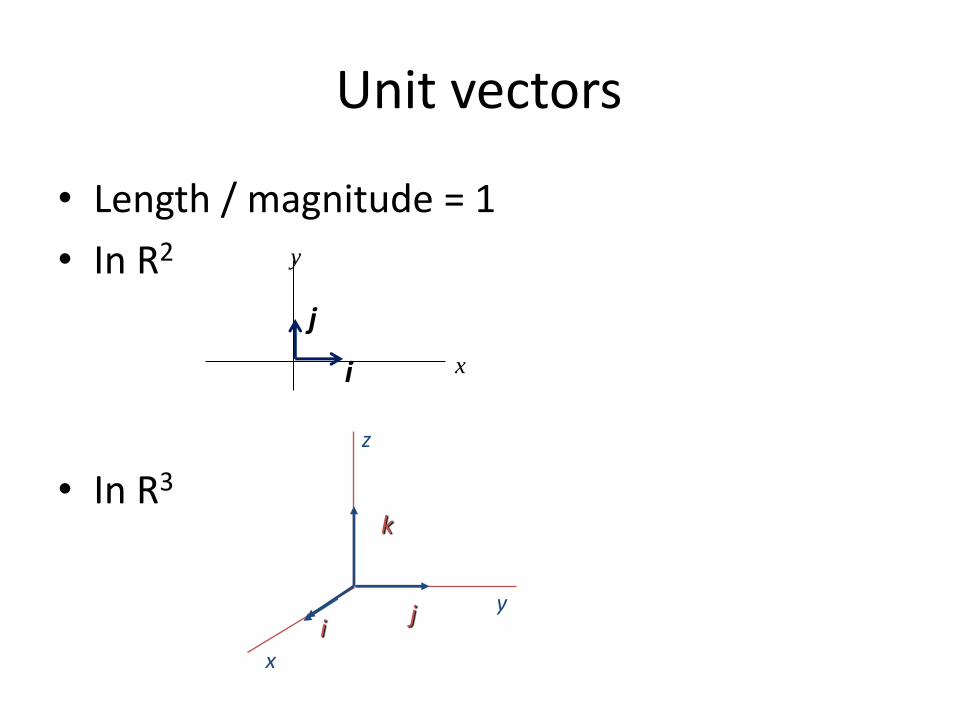
Unit vectors
• Length / magnitude = 1
• In R2
j
i
• In R3
y
z
x
j
k
i
y
x
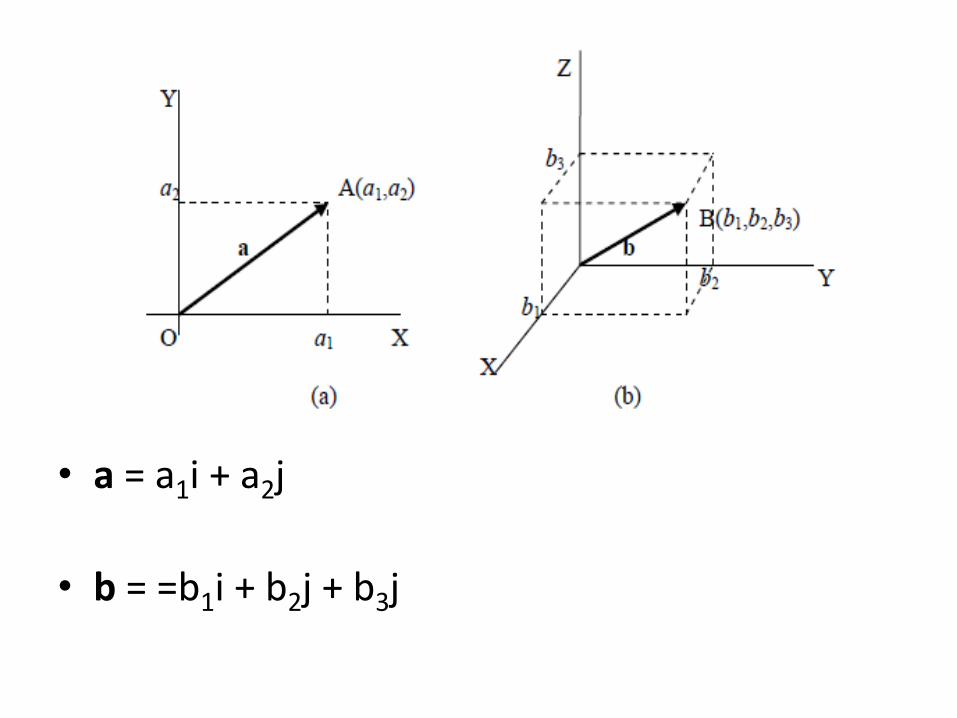
• a = a1i + a2j
• b = =b1i + b2j + b3j
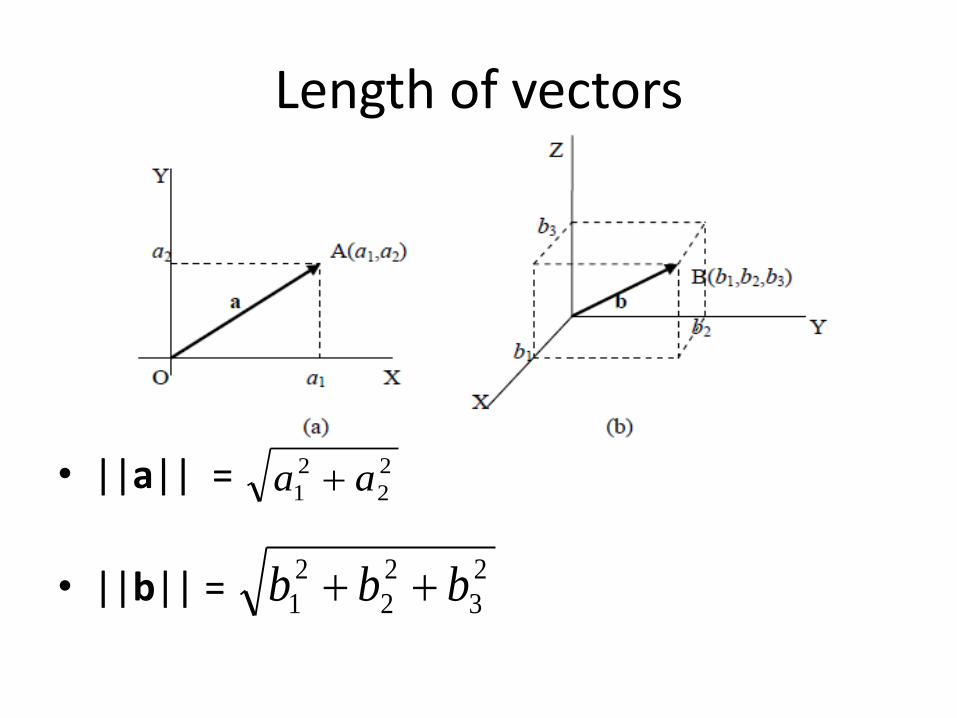
Length of vectors
• ||a|| =
• ||b|| =
2
2
2
1 aa
2
3
2
2
2
1 bbb
Some Properties
• For all a, b, c Rn (n = 2 or 3) and k, l R, we have:
1. a + b = b + a.
2. a + (b + c) = (a + b) + c.
3. There’s a special vector 0 such that a + 0 = a.
4. k(a + b) = ka + kb.
5. (k + l)a = ka + la.
6. k(la) = (kl)a = l(ka).
Geometric Ideas
a
a
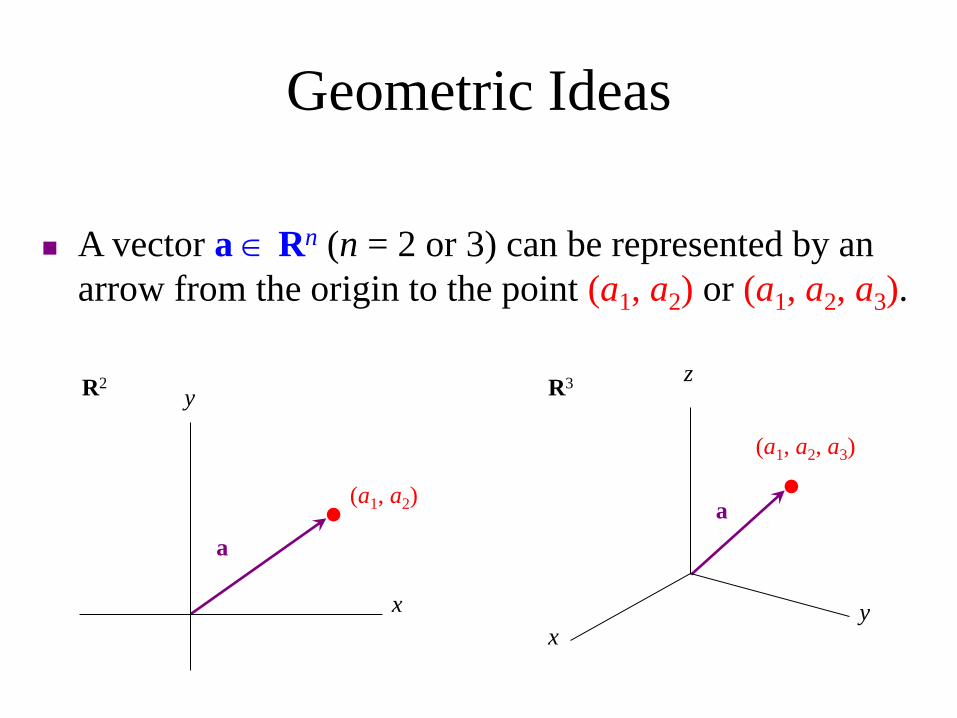
A vector a Rn (n = 2 or 3) can be represented by an
arrow from the origin to the point (a1, a2) or (a1, a2, a3).
(a1, a2)
(a1, a2, a3)
y
x
R2
y
z
x
R3
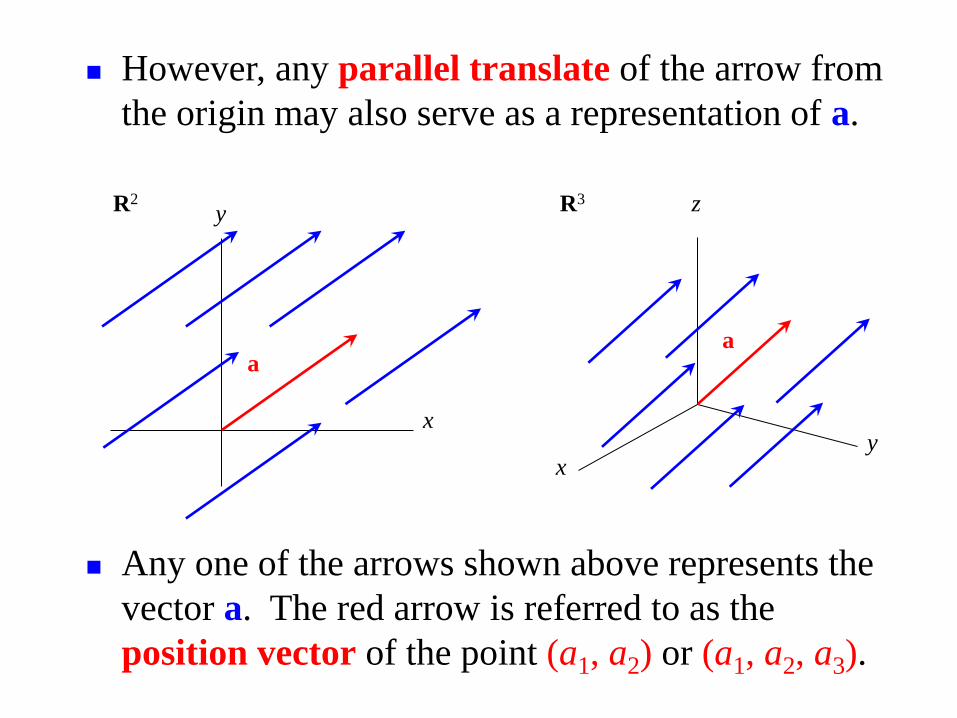
However, any parallel translate of the arrow from
the origin may also serve as a representation of a.
y
x
R2
y
z
x
R3
Any one of the arrows shown above represents the
vector a. The red arrow is referred to as the
position vector of the point (a1, a2) or (a1, a2, a3).
a a
Visualization of Vector Addition
b
a
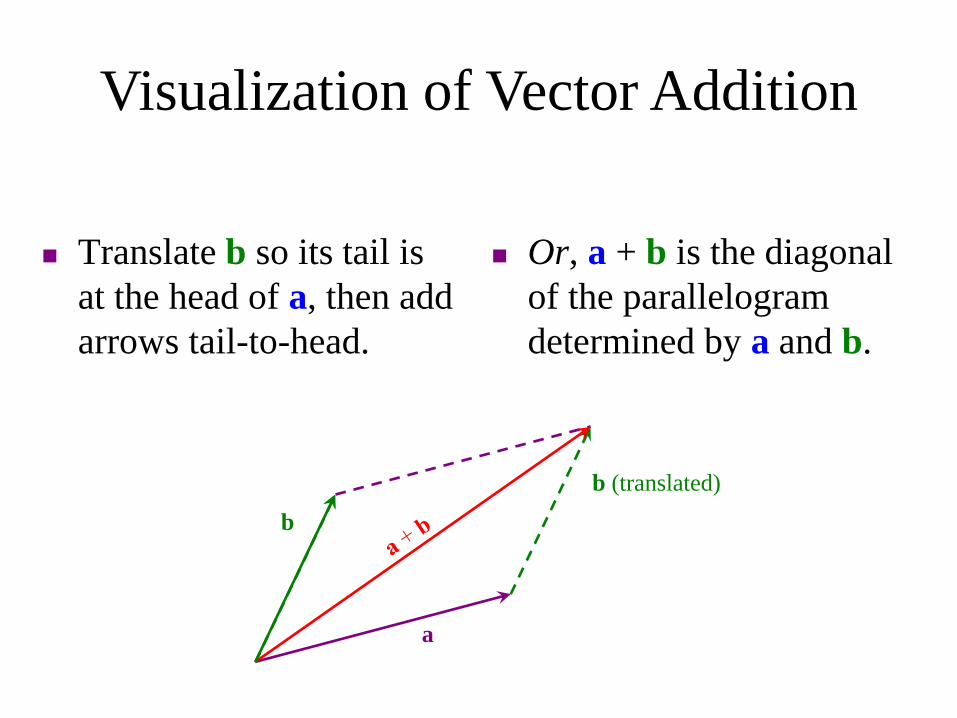
Translate b so its tail is
at the head of a, then add
arrows tail-to-head.
Or, a + b is the diagonal
of the parallelogram
determined by a and b.
b (translated)
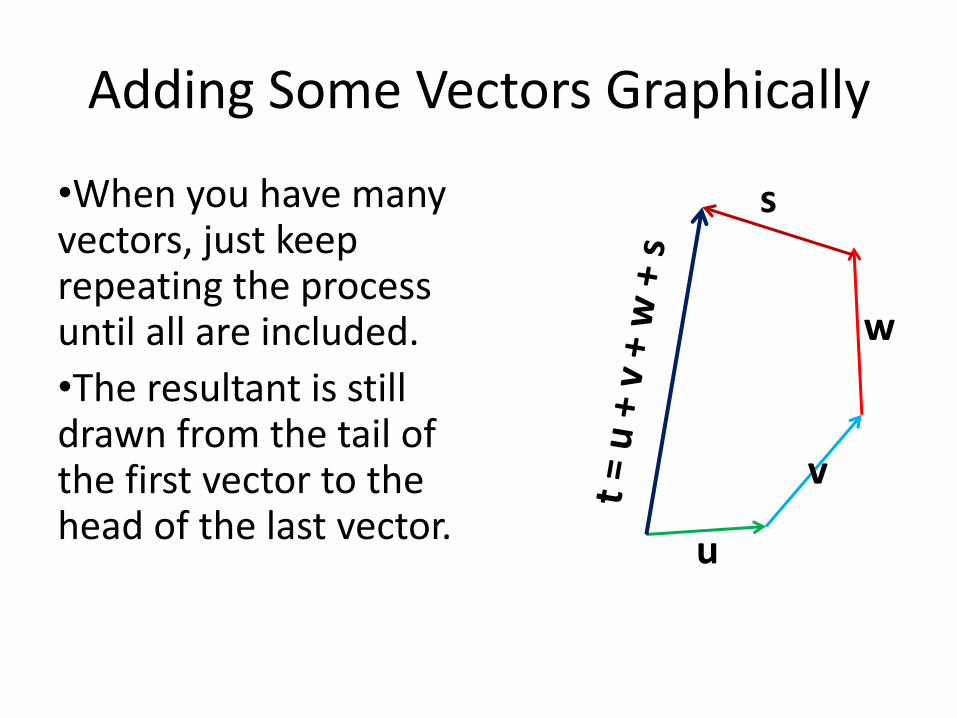
Adding Some Vectors Graphically
•When you have many vectors, just keep repeating the process until all are included.
•The resultant is still drawn from the tail of the first vector to the head of the last vector.
u
v
w
s
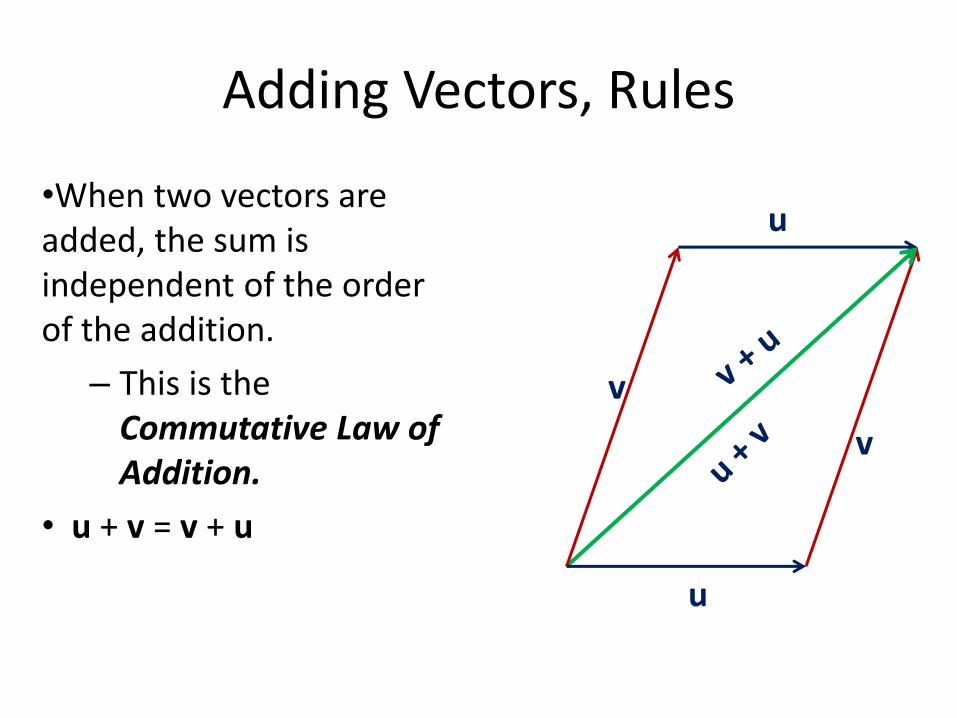
Adding Vectors, Rules
•When two vectors are added, the sum is independent of the order of the addition.
– This is the Commutative Law of Addition.
• u + v = v + u
u
u
v
v
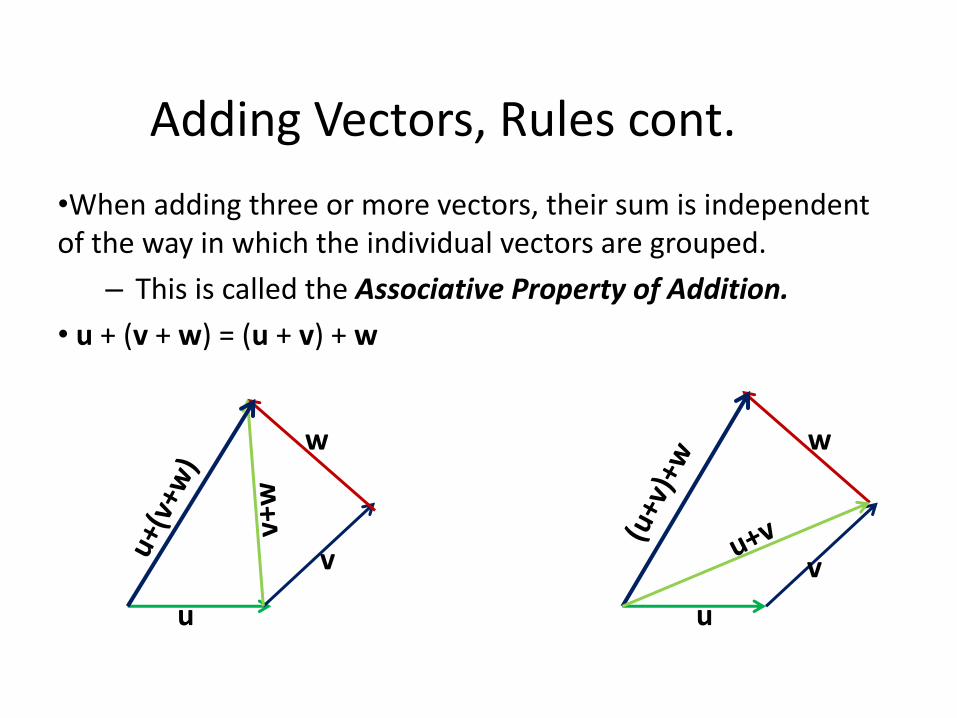
Adding Vectors, Rules cont.
•When adding three or more vectors, their sum is independent of the way in which the individual vectors are grouped.
– This is called the Associative Property of Addition.
• u + (v + w) = (u + v) + w
u
v
w
u
v
w
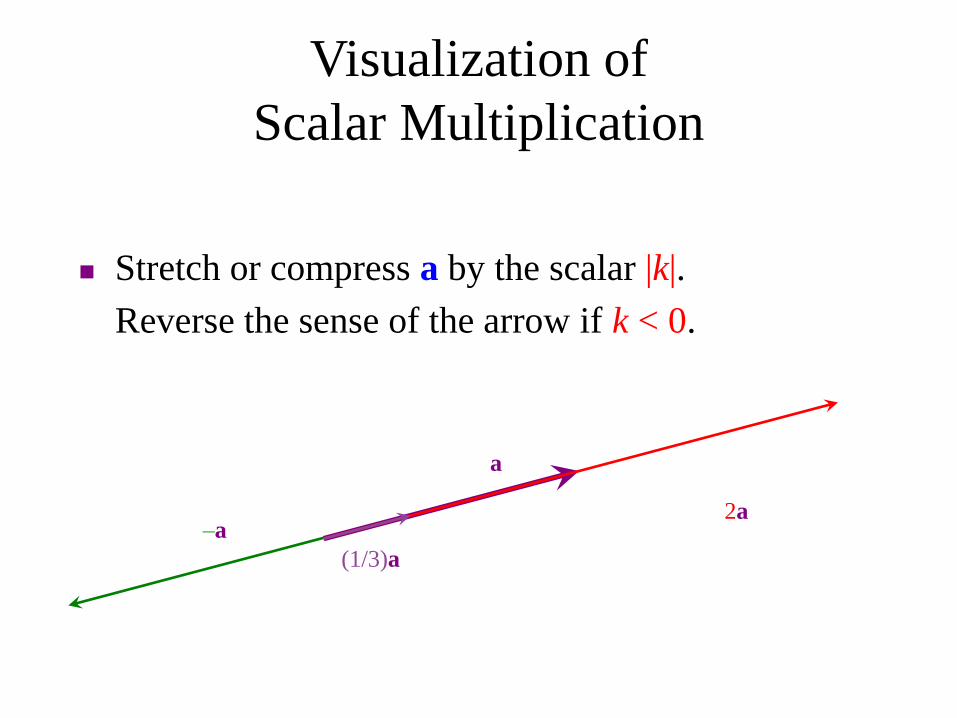
Visualization of
Scalar Multiplication
a
Stretch or compress a by the scalar |k|.
Reverse the sense of the arrow if k < 0.
2a
(1/3)a
–a
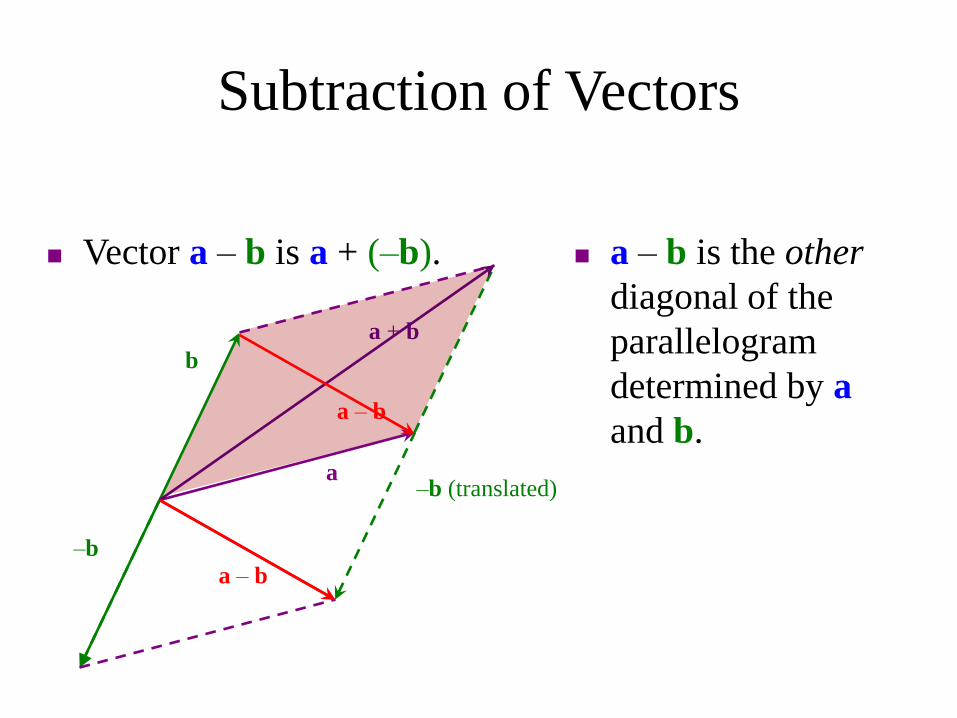
Subtraction of Vectors
b
a
Vector a – b is a + (–b).
a + b
a – b is the other
diagonal of the
parallelogram
determined by a
and b.
–b
a – b
a – b
–b (translated)
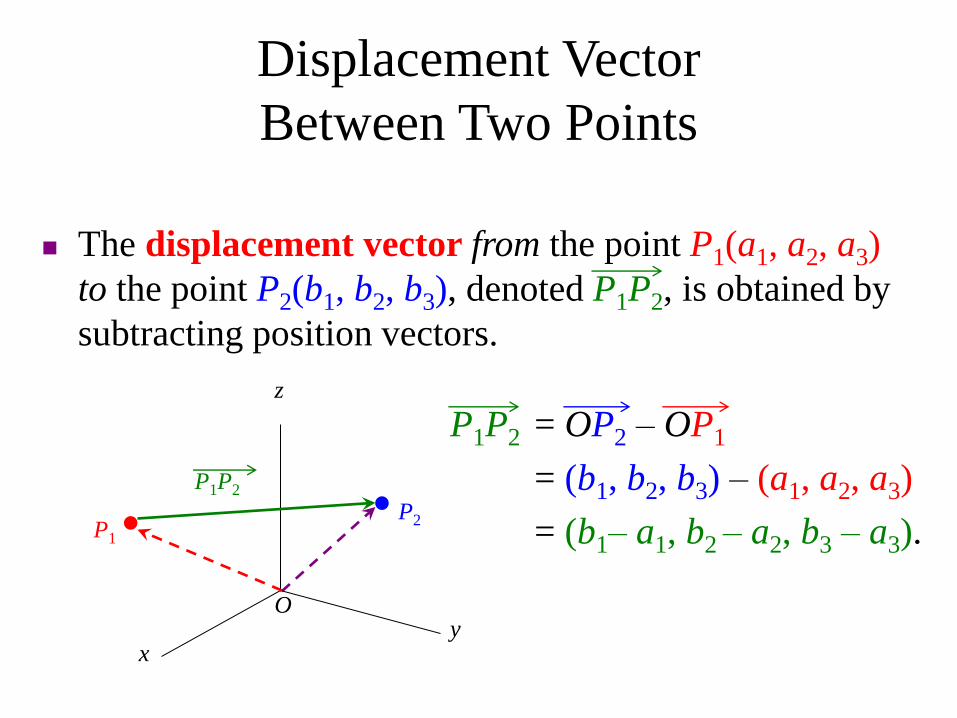
Displacement Vector
Between Two Points
P2
y
z
x
P1
P1P2
O
The displacement vector from the point P1(a1, a2, a3)
to the point P2(b1, b2, b3), denoted P1P2, is obtained by
subtracting position vectors.
P1P2 = OP2 – OP1
= (b1, b2, b3) – (a1, a2, a3)
= (b1– a1, b2 – a2, b3 – a3).
The Dot Product
A scalar product
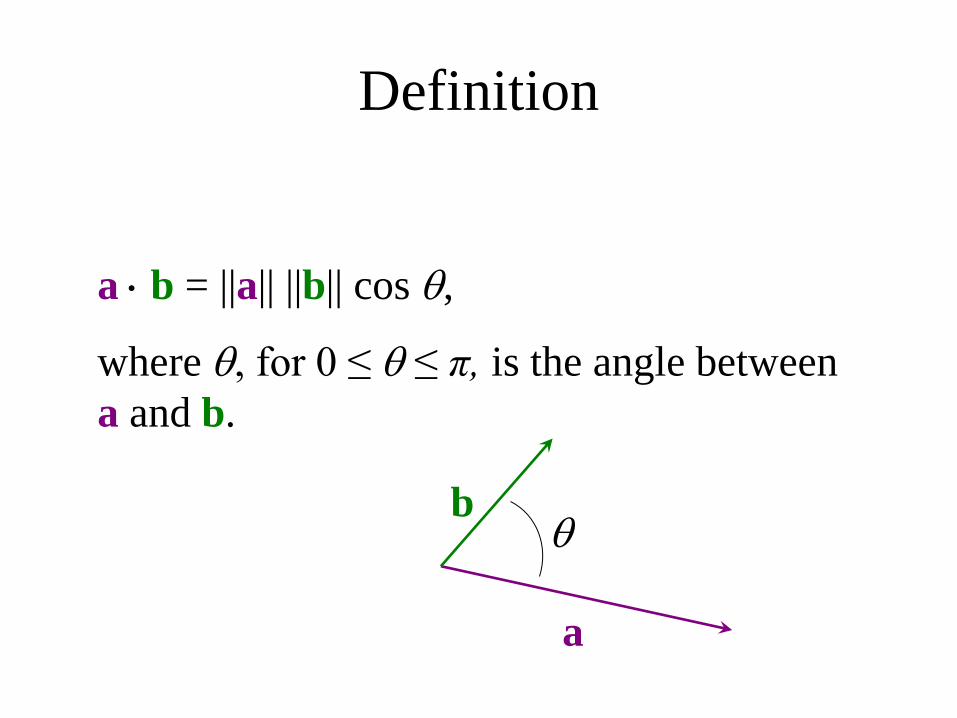
Definition
a
a b = ||a|| ||b|| cos ,
where , for 0 ≤ ≤ π, is the angle between
a and b.
b
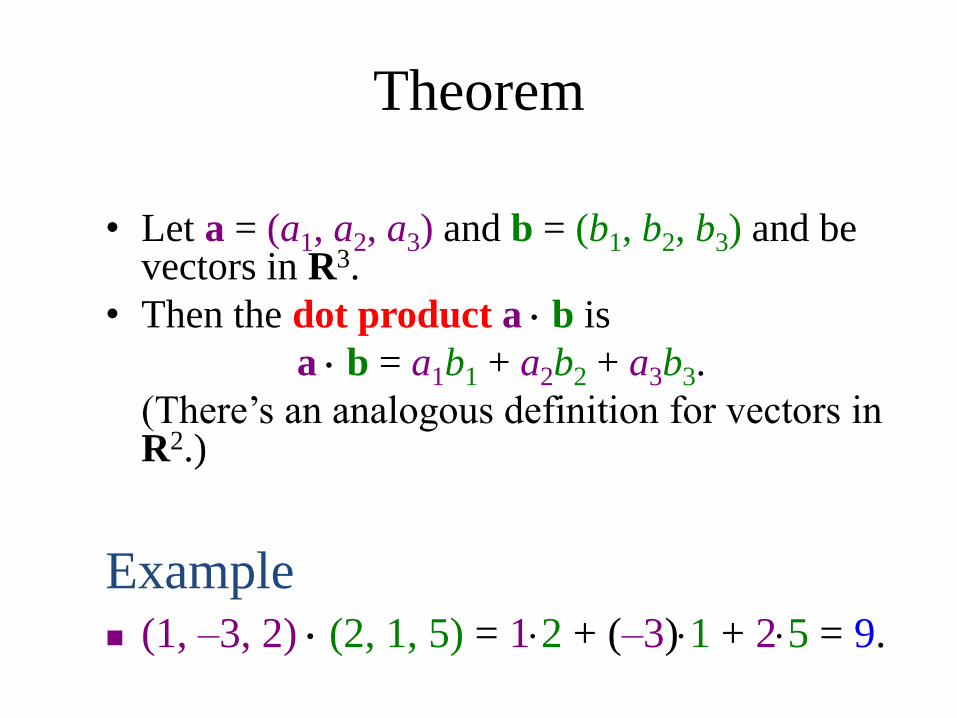
Theorem
• Let a = (a1, a2, a3) and b = (b1, b2, b3) and be vectors in R3.
• Then the dot product a b is
a b = a1b1 + a2b2 + a3b3.
(There’s an analogous definition for vectors in R2.)
Example (1, –3, 2) (2, 1, 5) = 12 + (–3)1 + 25 = 9.
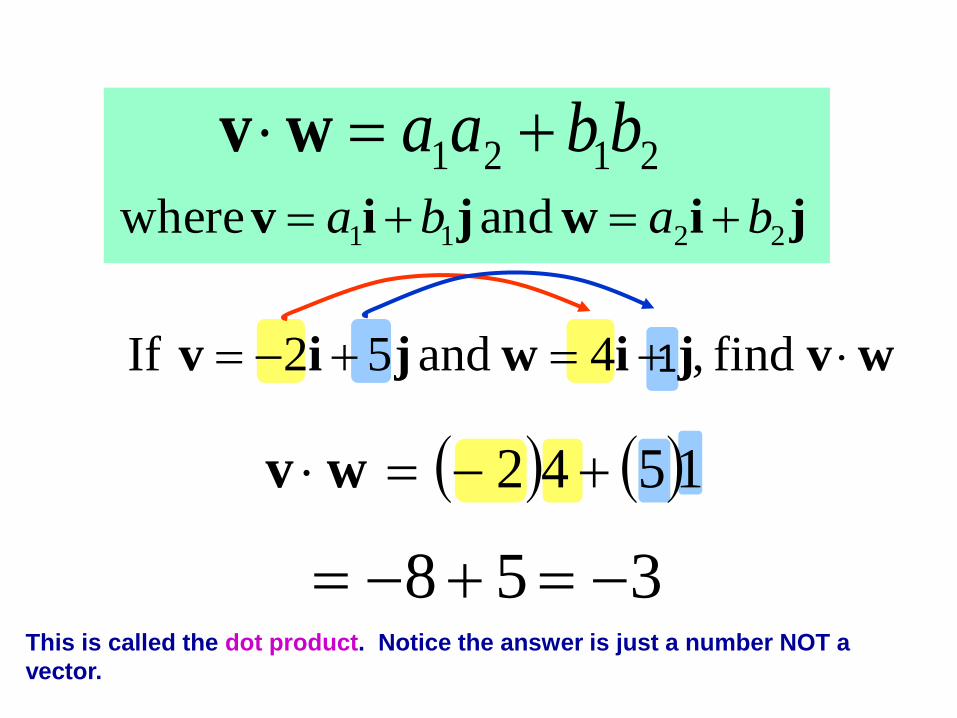
2121 bbaa wv
1542 wv
8 5 3
jiwjiv 2211 and where baba
1
This is called the dot product. Notice the answer is just a number NOT a
vector.
find ,4 and 52 If wvjiwjiv
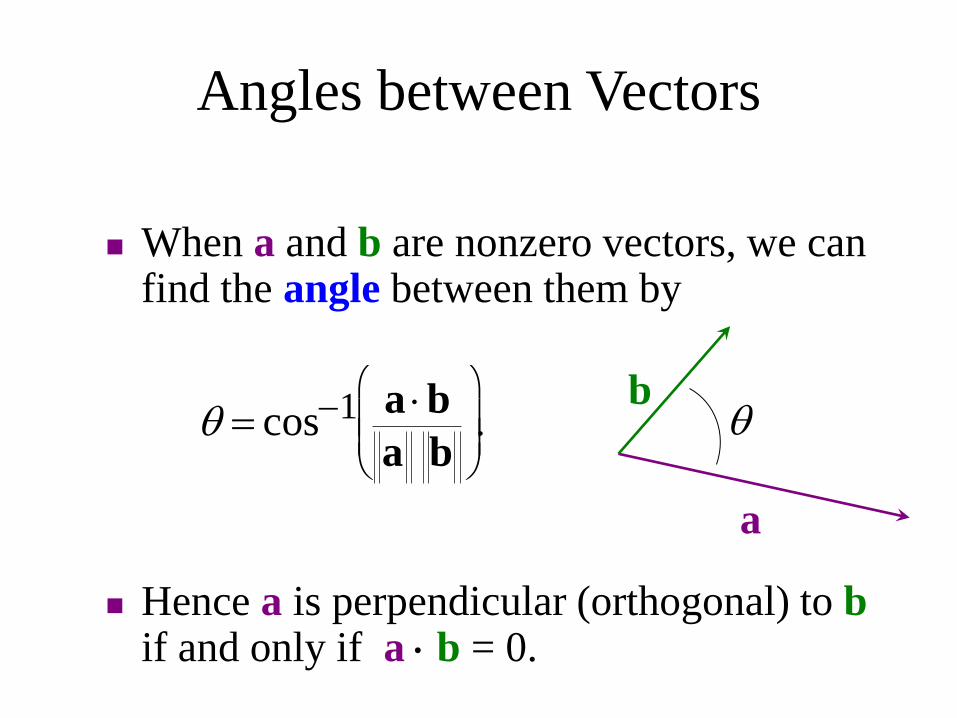
Angles between Vectors
a
b
When a and b are nonzero vectors, we can find the angle between them by
Hence a is perpendicular (orthogonal) to b if and only if a b = 0.
cos1 a b
a b
.
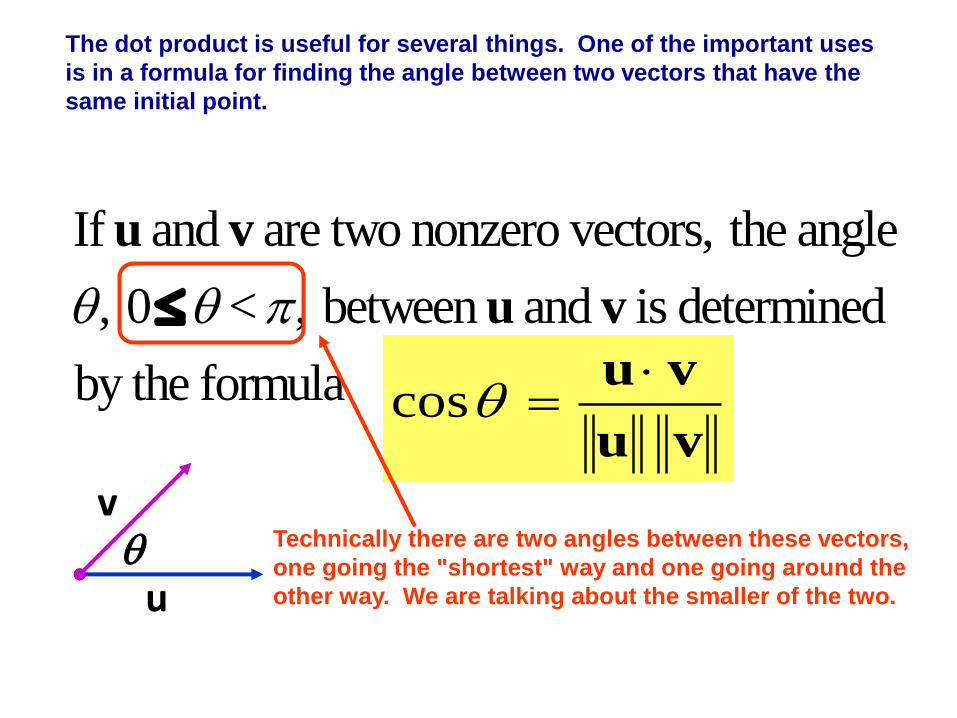
If and are two nonzero vectors, the angle
, 0 < , between and is determined
by the formula
u v
u v
vu
vu
cos
The dot product is useful for several things. One of the important uses
is in a formula for finding the angle between two vectors that have the
same initial point.
u
v Technically there are two angles between these vectors,
one going the "shortest" way and one going around the
other way. We are talking about the smaller of the two.
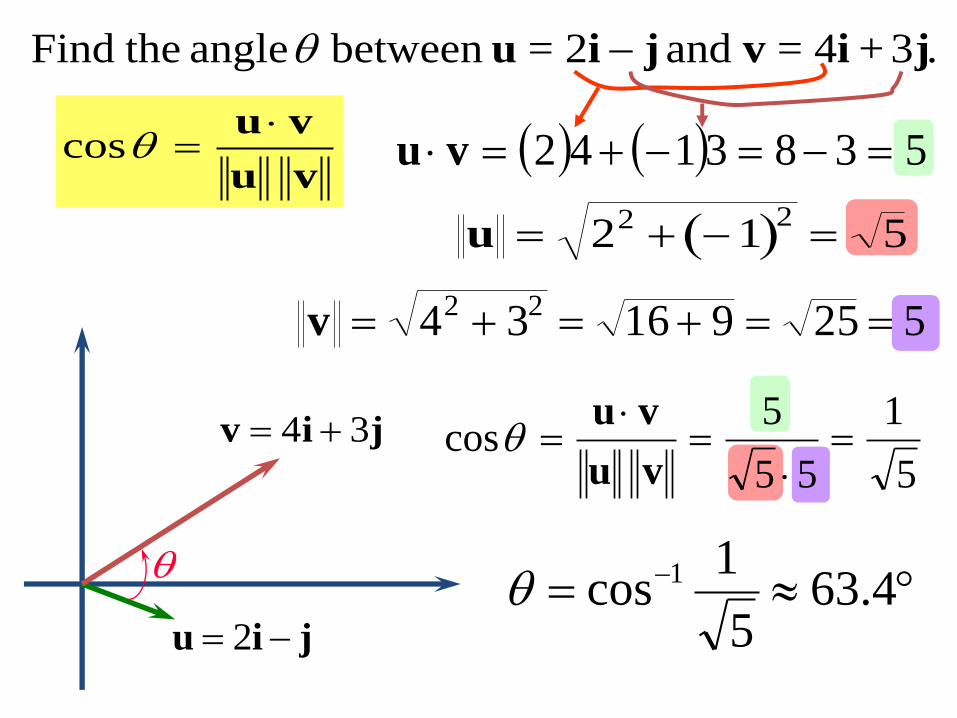
.3+4= and 2=between angle theFind jivjiu
v u
vu cos 5383142 vu
u 2 1 52 2
v 4 3 16 9 25 52 2
5
1
55
5cos
v u
vu
v i j 4 3
jiu 2
4.635
1cos 1
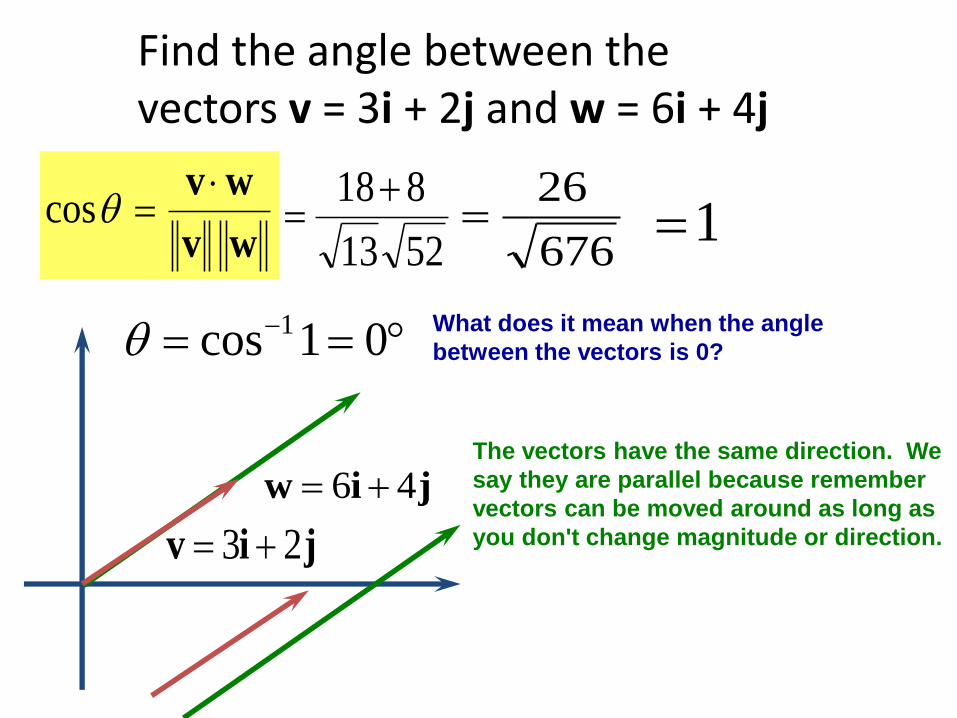
Find the angle between the vectors v = 3i + 2j and w = 6i + 4j
The vectors have the same direction. We
say they are parallel because remember
vectors can be moved around as long as
you don't change magnitude or direction.
w v
wv cos
5213
818
676
26 1
01cos 1What does it mean when the angle
between the vectors is 0?
jiv 23
jiw 46
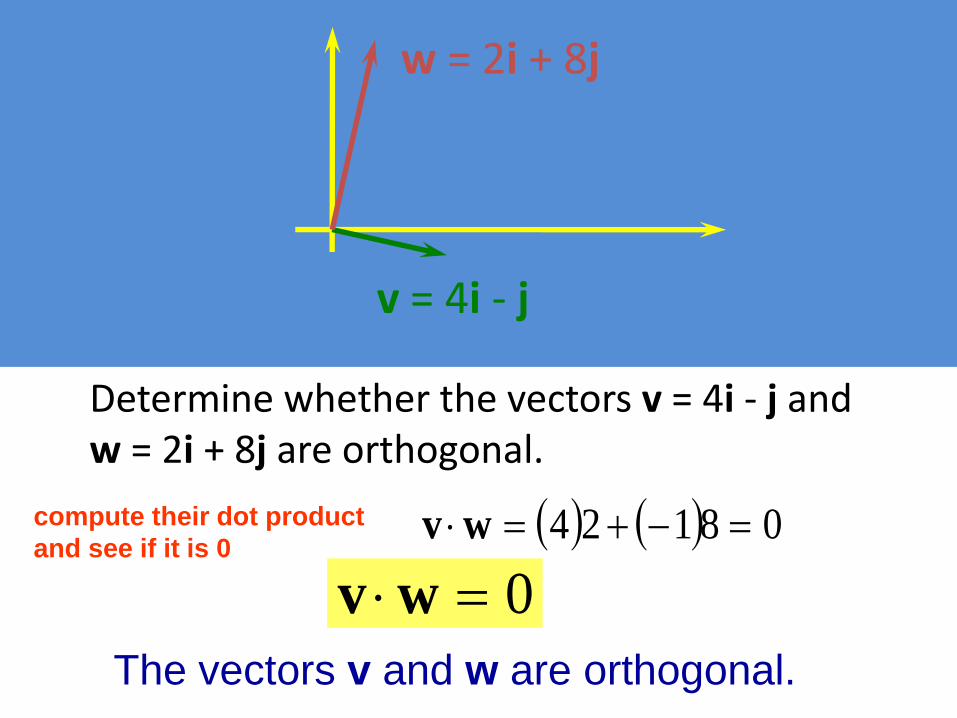
0 wv
Determine whether the vectors v = 4i - j and w = 2i + 8j are orthogonal.
08124 wv
The vectors v and w are orthogonal.
If the angle between 2 vectors is , what would their dot product be?
2
v u
vu cos
Since cos is 0,
the dot product must be 0.
2
2
Vectors u and v in this case are called orthogonal.
(similar to perpendicular but refers to vectors).
compute their dot product
and see if it is 0
w = 2i + 8j
v = 4i - j
Compute the dot product of each pair of vectors:
ii
jj
ji
Given the vectors u = 8i + 8j – 3k and v = —10i + 11j – 2k find the following.
vu
vv
uv
Given the vectors: u = 8i + 8j – 3k, v = —10i +11j – 2k, and w = 9i + 7j + 5j ; find the following.
wvu
wwuv 123
wuvu
Find the angle θ in degrees measured between the vectors u = 10i + 3j and v = 1i — 7j .
Determine if the pair of vectors is orthogonal, parallel, or neither.
jivjiu3
162and38
jivjiu 921and37
Algebraic Properties
1. a a ≥ 0; a a = 0 if and only if a = 0.
2. a b = b a.
3. (ka) b = k(a b) = a (kb).
4. a (b + c) = a b + a c.
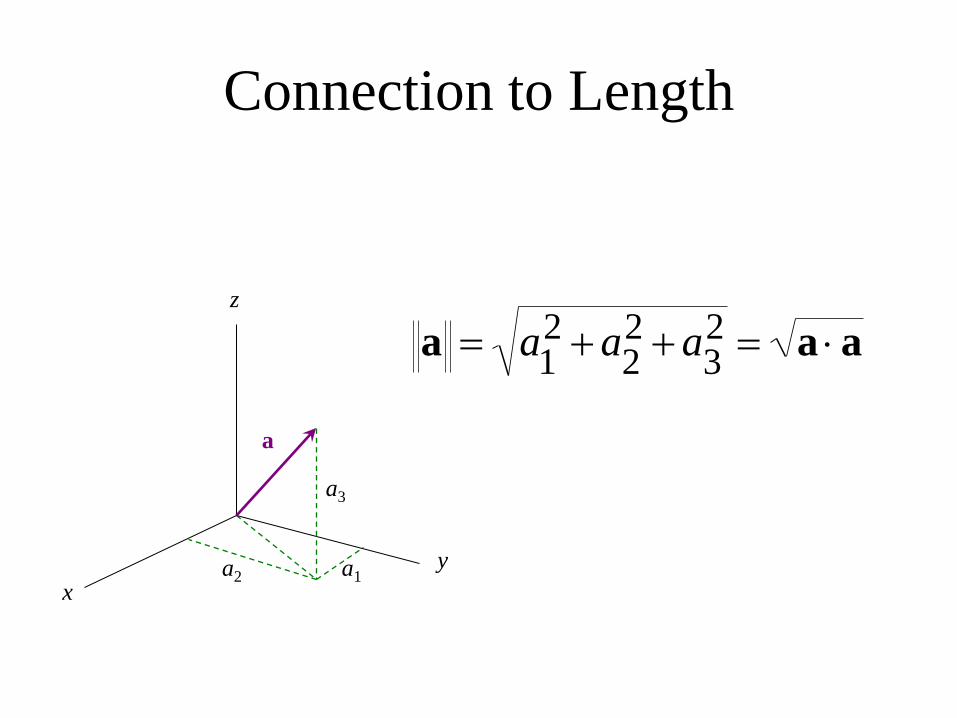
Connection to Length
a a12 a
22 a
32 a a
y
z
x a2
a3
a1
a
Normalization of a Vector
If a ≠ 0, a unit vector u in the direction of a is given by
||u|| = 1
u a
a.
Projections
• The next slide shows representations the same initial point P.
• If S is the foot of the perpendicular from R to the line containing with representation projection of b onto a and is denoted by proja b.
and of two vectors and withPQ PR a b
, then the vectorPQ is called the PS vector
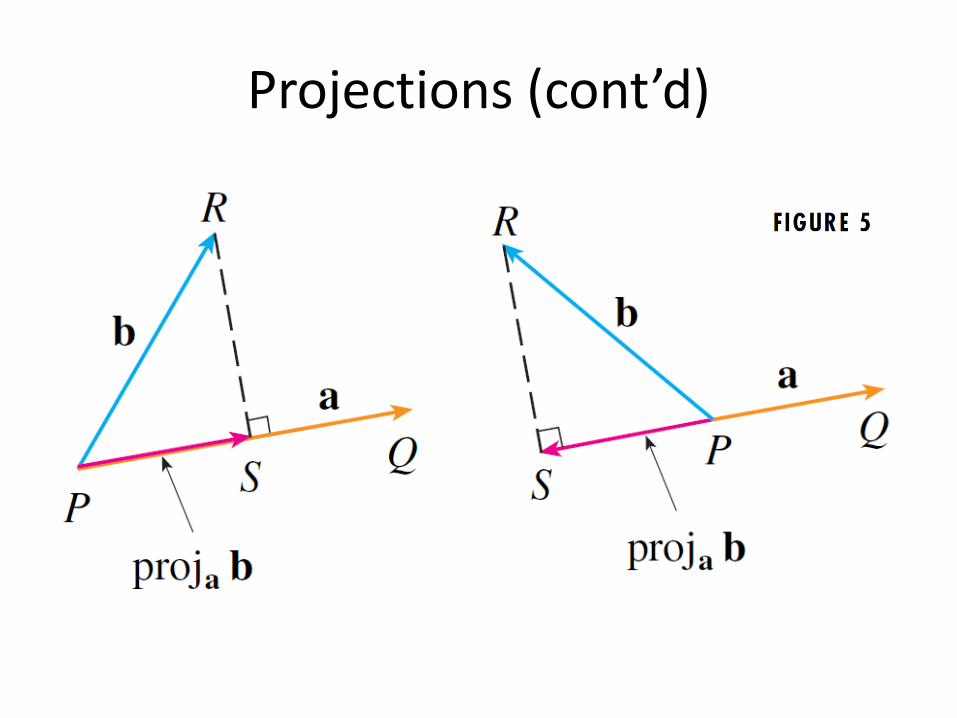
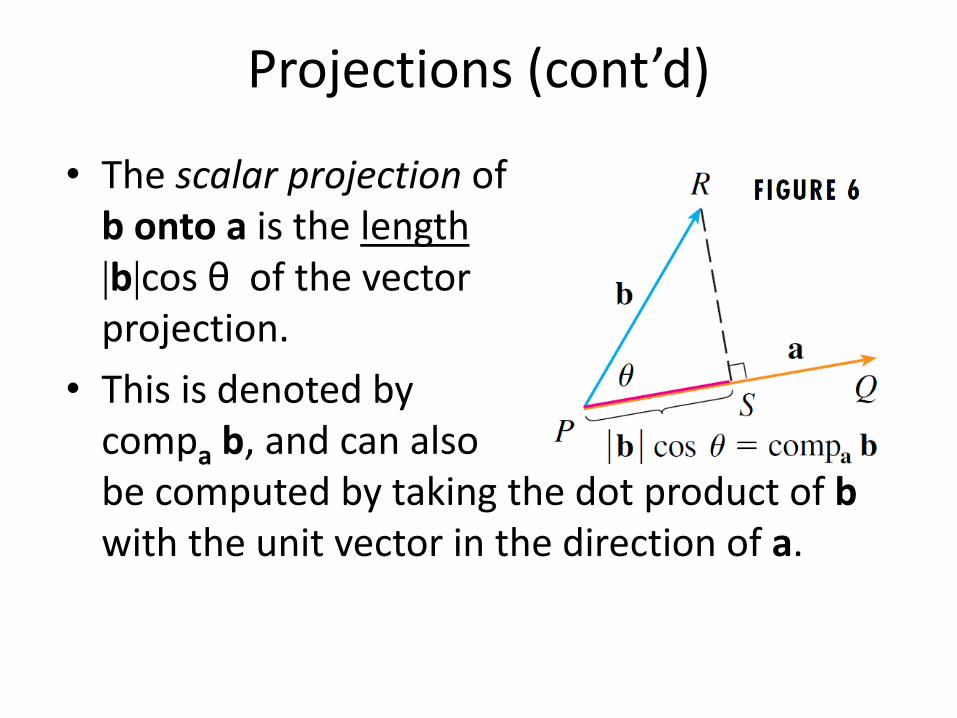
Projections (cont’d)
Projections (cont’d)
• The scalar projection of b onto a is the length |b|cos θ of the vector projection.
• This is denoted by compa b, and can also be computed by taking the dot product of b with the unit vector in the direction of a.
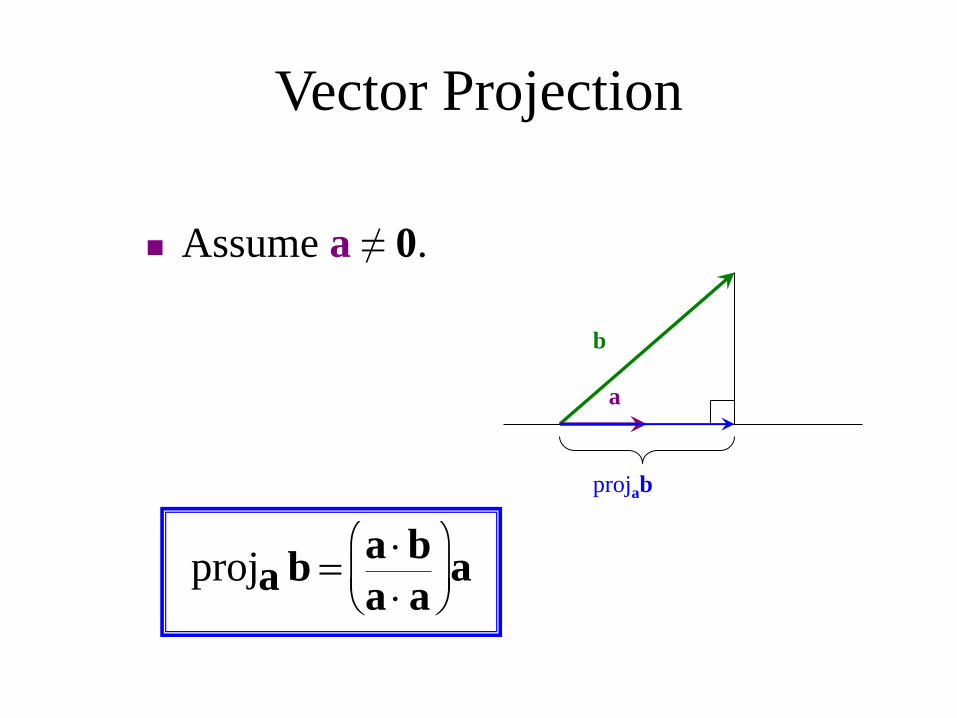
Vector Projection
Assume a ≠ 0.
proja b a b
a a
a
projab
b
a
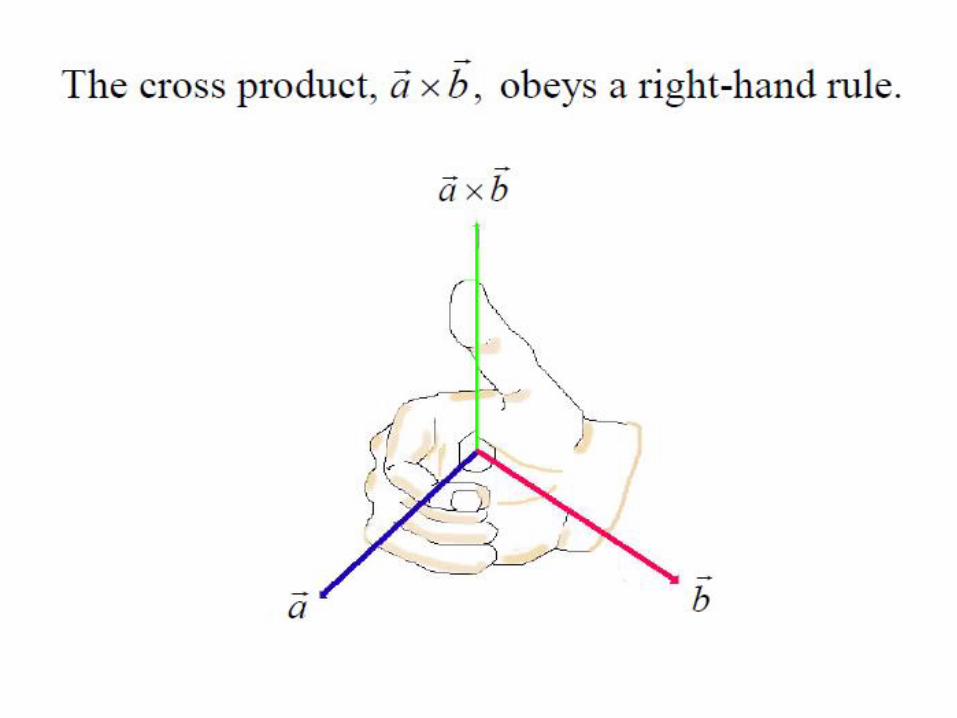
The Cross Product
A vector product
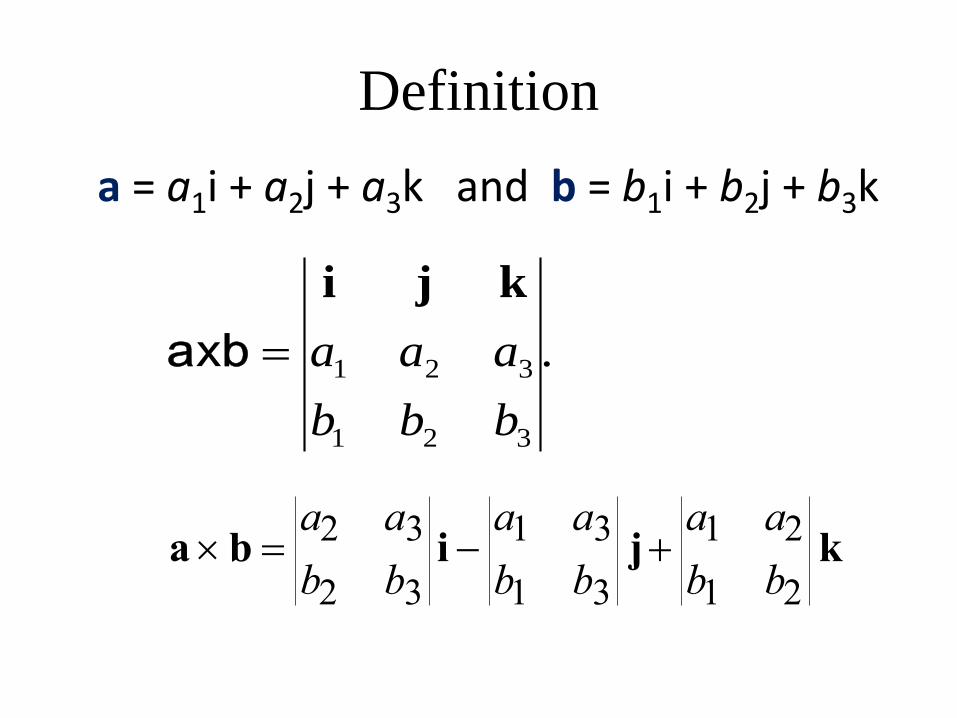
Definition
a b a2 a3
b2 b3i a1 a3
b1 b3ja1 a2
b1 b2k
.
321
321
bbb
aaa
kji
bax
a = a1i + a2j + a3k and b = b1i + b2j + b3k
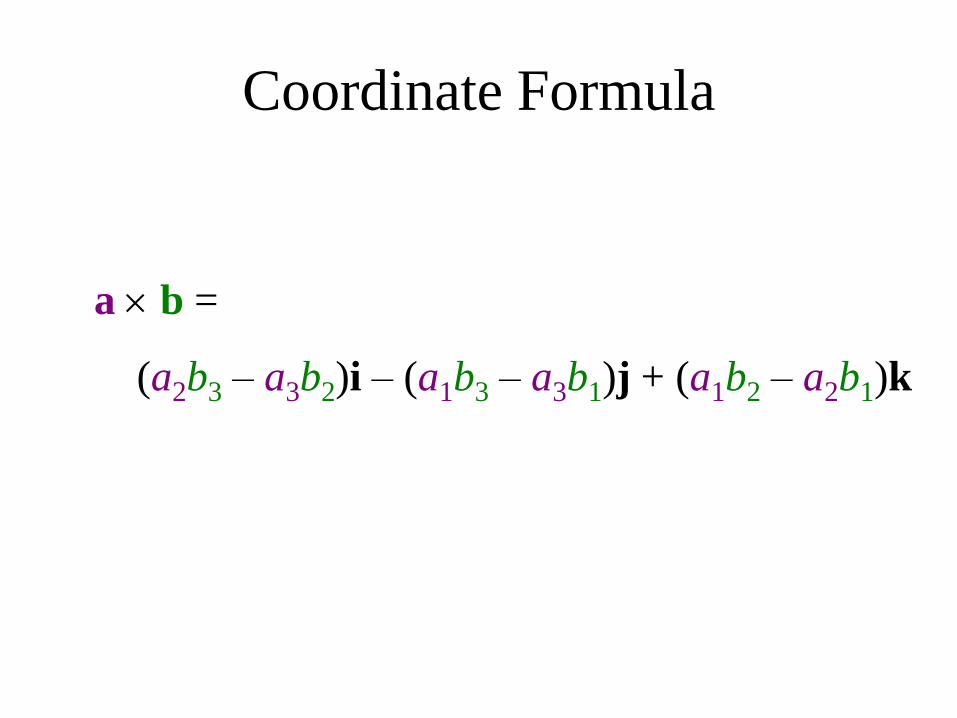
Coordinate Formula
a b =
(a2b3 – a3b2)i – (a1b3 – a3b1)j + (a1b2 – a2b1)k
Geometric Definition
• Let a = (a1, a2, a3) and b = (b1, b2, b3) be
vectors in R3.
• The cross product a b is the vector in
R3 with the following features:
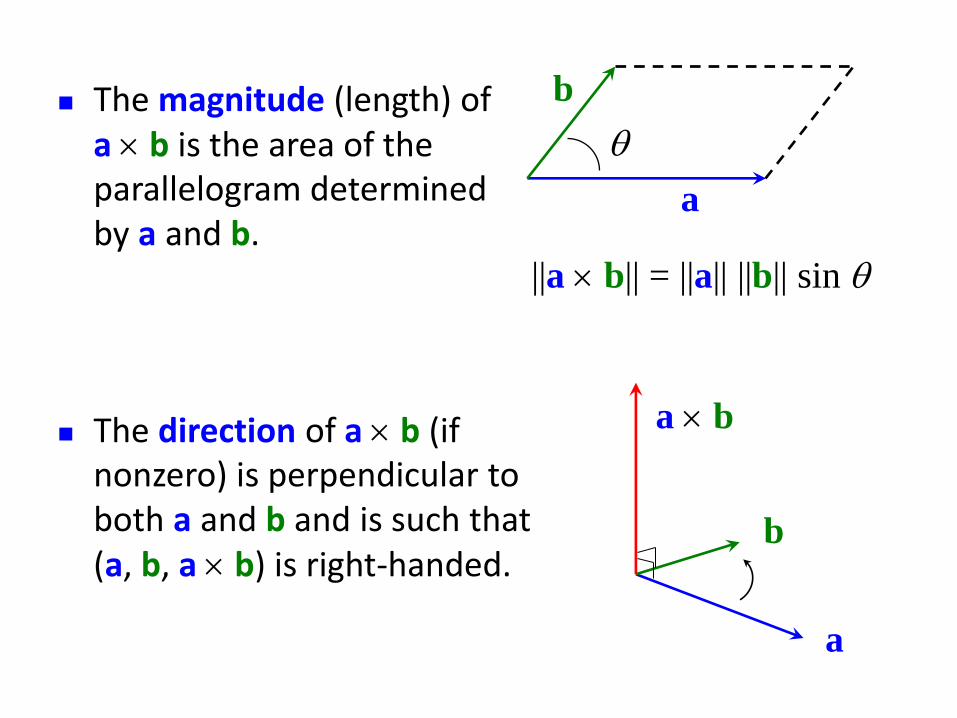
The magnitude (length) of a b is the area of the parallelogram determined by a and b.
a
b
||a b|| = ||a|| ||b|| sin
The direction of a b (if nonzero) is perpendicular to both a and b and is such that (a, b, a b) is right-handed.
a
b
a b
Algebraic Properties
1. a b = – b a
2. a (b + c) = a b + a c
3. (a + b) c = a c + b c
4. (ka) b = k(a b) = a (kb)