virtual driving as an important component for functional ... · virtual driving as an important...
TRANSCRIPT

Virtual driving as an important component forfunctional tests of ContiGuard® Functionsfunctional tests of ContiGuard FunctionsDr.-Ing. Marc Fischer, Tobias Fiedler Continental, Kemptener Str. 99, 88131 LindauPhilipp Huth, Bernhard Schick, IPG Automotive GmbH, 76199 Karlsruhe

Agenda
1. Introduction and Motivation
2. Emergency Brake Assist “EBA City” from Continental
3 Simulation environment for “EBA City”3. Simulation environment for EBA City
4. Customer use cases and test challenges
5. Maneuver and evaluation catalogue
6. Benefits and Conclusion
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 2

Introduction and Motivation
Our Vision: Zero Accidents
This Requires Safety Solutions for all Price Segments and Situations
One part of the Puzzle is the Emergency Brake Assist (EBA) City
Target is to reduce accidents in the Speed Range below 30 km/h
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
3 / Dr.-Ing. Marc Fischer / Datum © Continental AG

Introduction and Motivation
69% of accidents with injuries to persons are in city areas up to 30 kph
228717221306
2007 2008
Source: Statistisches Bundesamt
86662
20466
81039
18269
In City Out of City Autobahn
Casualties with injury to persons in Germany
Rear collision is the most frequent collusion type
Main reason is the lack of attention of the driver
“Emergency Brake Assist” from Continental was developed to support drivers in these situations
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)

Closing Velocity Sensor – Sensor Platform for EBA City
Principle of CV - Closing Velocity Sensor for environment identification
Sensor Principle: Time of Flight of Light PulsesWave length: IRMounting Position: behind WindscreenMounting Position: behind Windscreen
at interior rear view mirror
• Sensor generates 3 independent Beamsg p• Operation Range up to approx. 10 m
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)

EBA City – 3 FunctionalitiesEBA City
PreFill
Preconditioning ofthe Brake System
ObstacleObstacle
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
6 / Dr.-Ing. Marc Fischer / Datum © Continental AG

EBA City – 3 FunctionalitiesEBA City
PreFill ppBrake AssistSupport
Preconditioning ofthe Brake System
Sensitivity Adjustmentof Brake AssistThresholds
ObstacleObstacle
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
7 / Dr.-Ing. Marc Fischer / Datum © Continental AG

EBA City – 3 FunctionalitiesEBA City
PreFill ppBrake AssistSupport g
AutonomousBraking
Preconditioning ofthe Brake System
Sensitivity Adjustmentof Brake AssistThresholds
Graded,AutonomousDecelerationRequestRequest
ObstacleObstacle
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
8 / Dr.-Ing. Marc Fischer / Datum © Continental AG

Challenges for the Development
Development of a complex System
(multiple components, Sensor, Brake System etc.)( p p , , y )
Driver Assistant function with strong intervention into vehicle dynamics
Functionality has to consider physical behavior of vehicle
consideration of complex driving scenarios
(e.g. evasion by steering, etc.)
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
9 / Dr.-Ing. Marc Fischer / Datum © Continental AG

Requirements for a Simulation Tool
Closed Loop Simulation
Multiple domain Simulation (sensoric, brake systems, vehicle dynamics)
Possibility to perform rapid testing of algorithmsPossibility to perform rapid testing of algorithms
Realistic and adaptable vehicle models
Simulate complex scenarios driver model + maneuver control
Realistic brake hydraulic modely
Real time capability for HIL
I t f b t i l t d i t d d lInterface between simulated environment and sensor model
Bitte Absenderangaben auf dem Folienmaster ändern ein- oder zweizeilig)
10 / Dr.-Ing. Marc Fischer / Datum © Continental AG
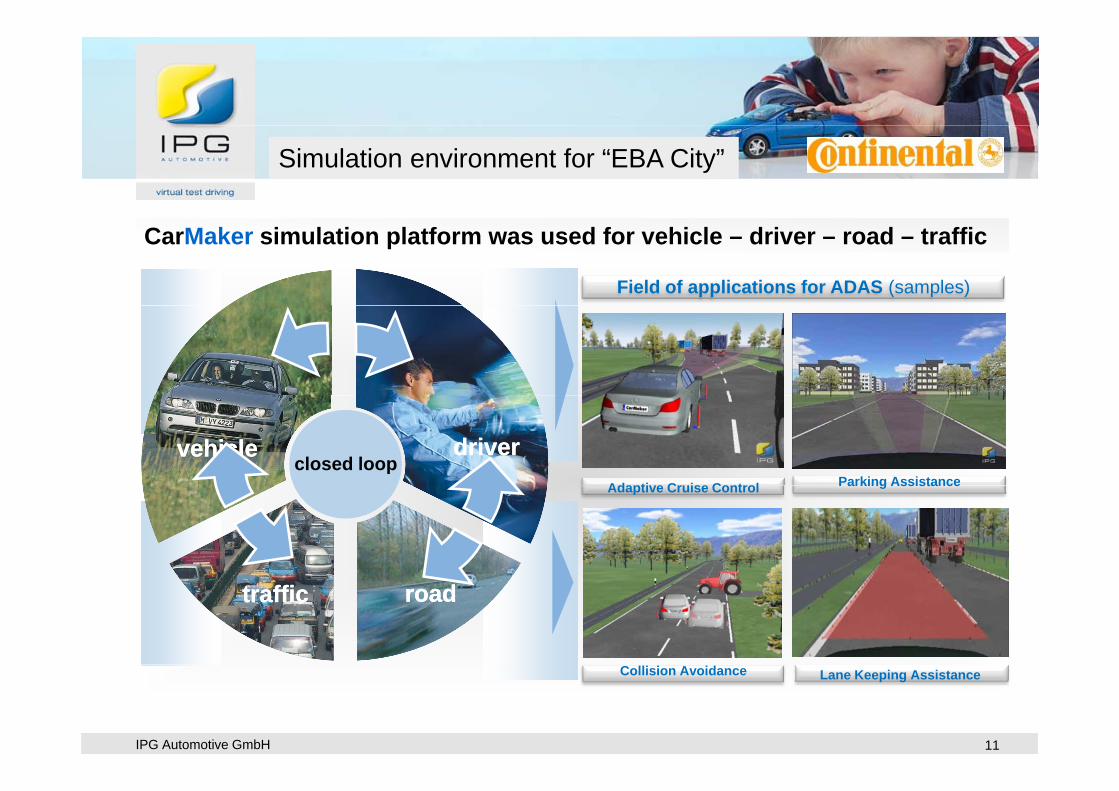
Simulation environment for “EBA City”
CarMaker simulation platform was used for vehicle – driver – road – traffic
Field of applications for ADAS (samples)
driverdrivervehiclevehicleclosed loop
Parking AssistanceAdapti e Cr ise Control Parking AssistanceAdaptive Cruise Control
roadroadtraffictraffic
IPG Automotive GmbH 11
Lane Keeping AssistanceCollision Avoidance

Simulation environment for “EBA City”
Real system
Vi t l i t
CV-Sensor CV Sensor with EBA CityTest vehicle
Virtual environment
12IPG Automotive GmbH Sheet 12Final presentation of the Bachelor’s thesis, 12.10.2009
DA Sensor Model SIMULINK ModelVehicle Dynamics Model

Simulation environment for “EBA City”
Brake SystemDeceleration
Request EnEnSensor ECUSensor ECU Real World
Key models have been integrated into CarMaker model platform
Vehicle Datae.g. Speed, Yaw Rate, Long. Acceleration etc.
nvironment
nvironment
SensoricsSensoricsFunction
on Target HW
Functionon
Target HW
relevantObject
g
DecelerationRequest
3D3D
relevantObject
ECUECU SS
ObjectList
Brake Model 3D Enviro3D Enviro
SensorMaskModel
SensorMaskModel
Simulation
MeasurementError Measurement
E
ECUFunctionSIMULINK
ECUFunctionSIMULINK
SensorBehavioral
Model
SensorBehavioral
Model
Vehicle Dynamics Model
Vehicle Data
onment Mode
onment ModeContinental
Errorall Objects with ideal properties within
detection range
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 13
Vehicle Dynamics Model elel
CarMakerContinental

A vehicle control module allow the interaction of driver and ADASA vehicle control module allow the interaction of driver and ADAS
Simulation environment for “EBA City”
systems
rr trol
trol
del
del
ring
rtrain
ynam
icee
l rie
r elel del
del
PGD
river
PGD
river
Driv
Man
Driv
Man
cle
Con
tcl
e C
ont
icle
Mod
icle
Mod St
eer
Tire
Mod
elTi
re M
odel
sion
Powe
re
Aero
dy cor
Whe
carr
y
Driving Tasks Vehicle Reaction
oad
Mod
eoa
d M
ode
affic
Mod
affic
Mod
IPIP DD
Vehi
Vehi
Veh
Veh TT
Susp
ens
Brak
e
Sens
o
Body
Ro
Ro
Tra
Tra
CLOSED LOOP
Driver model is embedded in a drive maneuver control moduleDriving tasks management and event driven operationsMonitoring and analysis of all quantitiesMonitoring and analysis of all quantities
HMI for drivers wish + vehicle control interface for cooperative functionsSteering wheel, pedal (brake, accel., clutch), shift, cockpit switches etc.
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 14
Acc/Dec interface and steer angle /torque interface for system requests

Simulation environment for “EBA City”
Following approaches and boundary conditions have been considered
Simulation provide first of all ideal object information e.g. position, size, speed, acceleration are exactly knownFor comparability with real test scenarios - at least partial sensor properties (measurement errors) must be modeledQuality of vehicle information on CAN (e.g. speed) suffers fromQuality of vehicle information on CAN (e.g. speed) suffers from measurement errors (absolute, temporary, delay’s, noise etc.). This could lead to difference to real testing. A systematic signal manipulation within the test maneuver must be possible
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 15
y g p pto investigate the failure robustness

Customer use cases and test challenges
Simulation shall reconstruct real use cases by event triggered maneuvers
Pure longitudinal mission
speed difference to moving or stationary objects (e.g. drive against obstacle)
Pure lateral mission
lateral moving object (e.g. vehicle sheer in)
avoiding obstacle (e.g. speed breaks and chicanes in play streets)
Combined longitudinal and lateral mission
lateral moving object with speed difference (e.g. vehicle sheer in)
IPG Automotive GmbH 16
lateral moving object with speed difference (e.g. vehicle sheer in)
avoiding moving obstacle with speed difference (e.g. entrance at parking area)

Customer use cases and test challenges
Event triggered maneuvers guarantee reproducibility and reusability
Obstacle avoidanceObstacle avoidanceReal test driving Real test driving
Obstacle avoidanceObstacle avoidanceVirtual test driving Virtual test driving
How probable is the collision situation?
How easy is the avoidance by steer? d steer intervention
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 17
d steer intervention

Customer use cases and test challenges
Event triggered maneuvers by monitor and analyze of related quantities
Sample 1: Pure longitudinal maneuversMan 2: ConstantMan 2: ConstantMan 2: ConstantMan 2: Constant Man 3: AccelerationMan 3: AccelerationMan 3: AccelerationMan 3: Acceleration Man 2: BrakingMan 2: BrakingMan 2: BrakingMan 2: Braking Man 1Man 1Man 1Man 1
d trigger
Sample 2: Pure lateral maneuversMan 1: AccelerationMan 1: AccelerationMan 1: AccelerationMan 1: Acceleration Man 2: Constant DrivingMan 2: Constant DrivingMan 2: Constant DrivingMan 2: Constant Driving Man 1: ConstMan 1: ConstMan 1: ConstMan 1: Const
d steer intervention
Man 3: Lane OffsetMan 3: Lane OffsetMan 3: Lane OffsetMan 3: Lane Offset
d steer intervention
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 18
Sample 3: Combined longitudinal and lateral maneuvers

Maneuver and evaluation catalogue
Functional Safety Assessment E t T A l i
A detail maneuver test catalogue have been developed based on …
Event Tree AnalysisReal Test ProceduresField Experience
Maneuvers Description Maneuver parameters Evaluation Criteria'sVariations
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 19
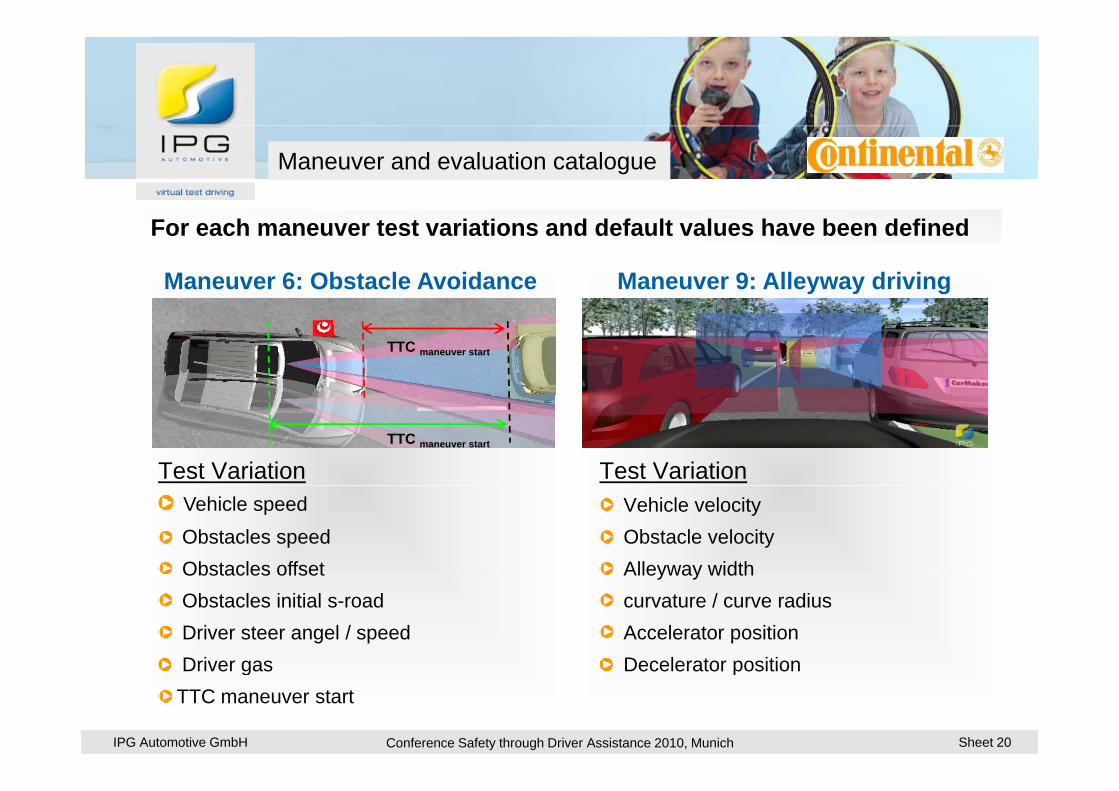
Maneuver and evaluation catalogue
For each maneuver test variations and default values have been defined
Maneuver 6: Obstacle Avoidance Maneuver 9: Alleyway driving
TTC maneuver start
TTC maneuver start
Test Variation Test Variation Vehicle speed Obstacles speed Obstacles offset
Vehicle velocityObstacle velocityAlleyway widthObstacles offset
Obstacles initial s-road Driver steer angel / speedDriver gas
Alleyway widthcurvature / curve radiusAccelerator positionDecelerator position
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 20
Driver gasTTC maneuver start
Decelerator position
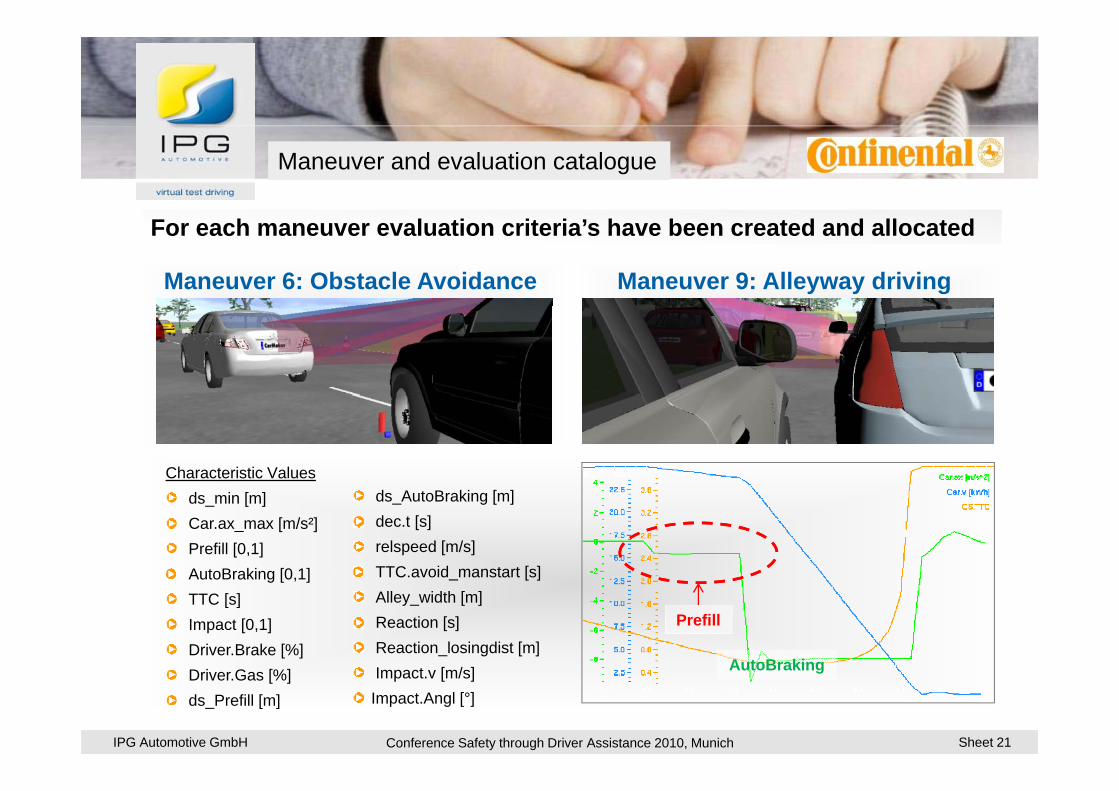
Maneuver and evaluation catalogue
For each maneuver evaluation criteria’s have been created and allocated
Maneuver 6: Obstacle Avoidance Maneuver 9: Alleyway driving
Characteristic Valuesds_min [m]Car.ax_max [m/s²]Prefill [0,1]AutoBraking [0 1]
ds_AutoBraking [m]dec.t [s]relspeed [m/s]TTC avoid manstart [s]AutoBraking [0,1]
TTC [s]Impact [0,1]Driver.Brake [%]
TTC.avoid_manstart [s]Alley_width [m]Reaction [s]Reaction_losingdist [m]
Prefill
AutoBraking
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 21
Driver.Gas [%]ds_Prefill [m]
Impact.v [m/s]Impact.Angl [°]
AutoBraking

Maneuver and evaluation catalogue
A test management tool was applied with maneuver and evaluation catalogue
Vehicle Configuration• Handover key values e.g. engine, tire …
Test Group Definition• e.g. longitudinal, lateral maneuvers … Qualification
Test Case 1• Test Case selection e.g. TestRun
Parameter VariationParameter Variation
Parameter Variations• Variation list of any system parameter• vehicle, road, controller,
test execution etc of all InfoFiles!
Test Case 2• Test Case selection e.g. TestRun
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 22
CONCERTO Application• Automatic start of post-processing

Benefits and Conclusion
Successful Closed Loop simulation of ADAS function with environment sensor
Implementation of a TestManager with respects to the demands from ADAS functions p g p
Benefits utilizing simulation for the development of ADAS functions:
Simulation studies for “Functional Safety Assessment” y
In the Loop Algorithm tests in the development phase
Parameter studies for integrated functions and related valid rangesg g
Virtual testing of functional system behavior
Test of “Failure Resistance” by failure imprint (maneuver driven)
IPG Automotive GmbH Conference Safety through Driver Assistance 2010, Munich Sheet 23
y p ( )
Virtual pre-tests for test matrix reduction of road tests

Thank YouThank You
Virtual driving as an important component forfunctional tests of ContiGuard® Functionsfunctional tests of ContiGuard FunctionsDr.-Ing. Marc Fischer, Tobias Fiedler Continental, Kemptener Str. 99, 88131 LindauPhilipp Huth, Bernhard Schick, IPG Automotive GmbH, 76199 Karlsruhe