vtol control & airspeed fault detection · vtol features and documentation tuning information...
TRANSCRIPT

VTOL Control & Airspeed Fault Detection
Roman Bapst - 21.06.2019

DevSummit - 2019 2
Content
● Introduction● Current VTOL Control Architecture and next Steps● Airspeed Fault Detection

DevSummit - 2019 3
VTOL Types
Tailsitter Tiltrotor QuadPlane
● Difficult to control (wind)● Less actuators● Simplicity
● Easier to control● Mechanically more
complex (tilt)
● Easy to control● Many actuators● Fuel engine

DevSummit - 2019 4
VTOL Introduction
● Ability to hover
● Land almost everywhere
● Fly efficient● Fly fast● Payload

DevSummit - 2019 5
Control Architecture
Advantages:● Rate controllers always control
same set of actuators → no re-tuning required
● Enables advanced safety features: stall prevention in fixed wing mode
● Control surfaces aid during hover in strong wind
Challenges:● We create a MISO system
which is more difficult to tune
DevSummit - 2019 6
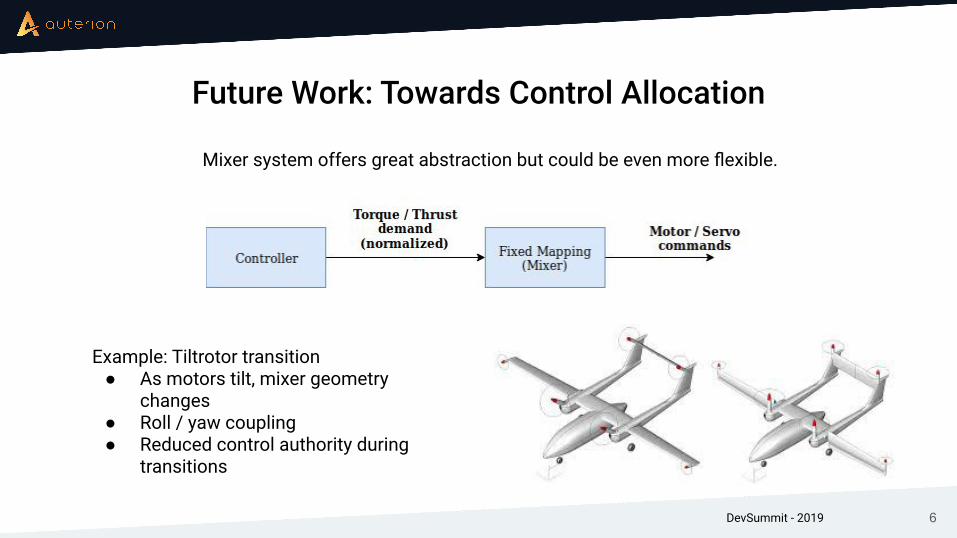
Future Work: Towards Control Allocation
Mixer system offers great abstraction but could be even more flexible.
Example: Tiltrotor transition● As motors tilt, mixer geometry
changes● Roll / yaw coupling ● Reduced control authority during
transitions

DevSummit - 2019 7
Future Work: Towards Control Allocation
● Enhance mixer to do control allocation● Advantage: Controllers remain independent from
specific vehicle configurations● More precise control during transitions (e.g.
eliminate roll / yaw coupling)● Fault tolerant control

DevSummit - 2019 8
VTOL features and documentation
Tuning information
We need more docs!Search on VTOL in user guide for more info.
Airframe references

DevSummit - 2019 9
Airspeed fault detection and handling
Why we use airspeed sensor?● Efficiency: Optimize flight efficiency● Safety: Prevent stalls and structural damage due to exceeding load factor● Flight Performance: Gain scheduling (scaling of signals to control surfaces)● Robustness: Limit attitude drift in case of GPS loss (EKF)
What are the problems:● Sensor is exposed to direct airflow and is thus vulnerable to blockage● False airspeed data can upset control system and in the worst case lead to flight into
terrain, stall or overspeeding

DevSummit - 2019 10
Current airspeed fault handling
● First stab at providing airspeed fault detection made by Paul Riseborough
● Check data timeout● Check EKF airspeed innovation● Check load factor consistency

DevSummit - 2019 11
Wind estimator
Wind north
Wind east
Airspeed scale
DevSummit - 2019 12
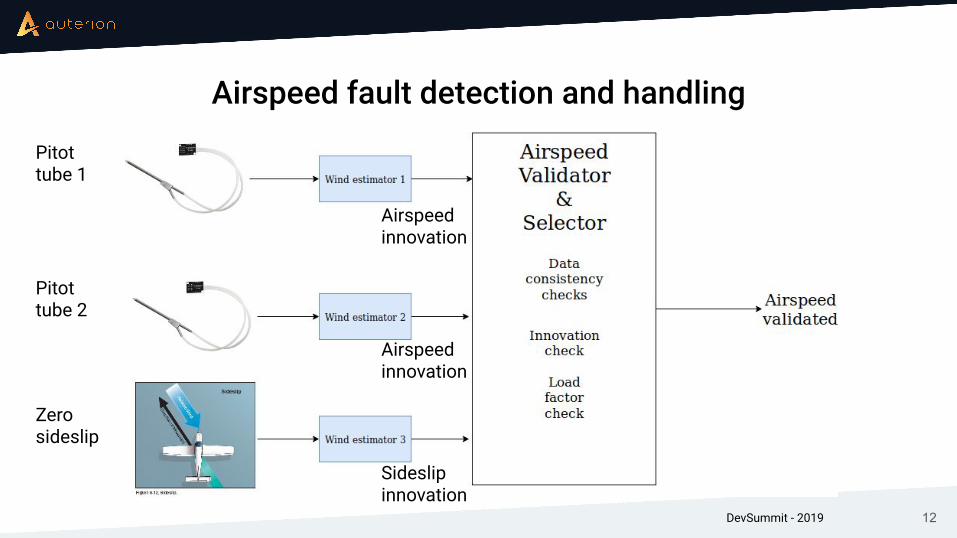
Airspeed fault detection and handling
Pitot tube 1
Pitot tube 2
Zero sideslip
Airspeed innovation
Airspeed innovation
Sideslip innovation

DevSummit - 2019 13
Excessive reading on one sensor
Airspeed 1 Airspeed 2
Wind estimator 1 innovations
Wind estimator 2 innovations
Selected Index Airspeed Validated

DevSummit - 2019 14
Partial blockage of both sensors
Airspeed 1 Airspeed 2
Wind estimator 1 innovations
Wind estimator 2 innovations
Selected Index
Airspeed validated

DevSummit - 2019 15
Gradual blockage of both sensors
Airspeed 1 Airspeed 2
Wind estimator 1 innovations
Wind estimator 2 innovations
Selected IndexAirspeed validated

DevSummit - 2019 16
Conclusion
● Success in detecting multiple fault conditions● Can be extended to any number of airspeed sensors● Lightweight wind-estimator● Requires careful handling of wind estimator resets● Pull request to PX4 in the coming days● Real world flight testing with dual airspeed

Thank you!