wave hydrodynamics prologue - central water commission
TRANSCRIPT

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Wave Hydrodynamics
Dr. R N Sankhua
Prologue
Wind blowing across any body of water will disturb the water surface. Once
these disturbances (waves) are created, gravitational and surface tension forces are
activated and they attempt to restore the water surface to a flat condition. It is these
restoring forces that allow waves to propagate, in the same manner as tension on a
string allows a string to vibrate. Coasts are subject to constant wave action, which
leads to both sediment erosion and accretion. The consequences of the induced
sediment transport include the clogging of harbor entrances, and the loss of beaches
and dunes during storms. In the open ocean, ships and offshore platforms can be
subjected to severe wave attack, which can not be neglected. In lieu of this, this
lecture has been designed to explain the wave mechanisms in the context of the
course.
Introduction
Wind energy is transferred to surface waters by frictional processes to
generate surface ocean currents and waves, which is a fundamental feature of
coastal regions. The most familiar ocean phenomena are the surface waves that
propagate along the air-water interface. Waves are formed by the wind blowing over
a span of water. Friction forces and pressure agitate the water surface, transferring
energy from the air to the water. The size of the waves, corresponding to the amount
of energy they are carrying, depends on three factors: the wind velocity, the duration
of the windstorm, and the size of the area over which the wind is blowing, called the
fetch. While the wind is blowing it distorts the surface into sets of irregular mounds
and depressions by pushing the wave crests up into jagged peaks and flattening, or
blowing out, the troughs. These wind waves, are called seas and travel away from
the region where they were created slightly faster than the wind velocity.
Once away from the blowing wind the waveforms become more regular. The
jagged peaks and valleys smooth out as rounded crests and troughs, their heights
decrease and their periods and wavelengths increase. A wave’s speed will increase
as its wavelength grows. This causes wave trains to spread out: the waves with
longer wavelengths, sometimes 400 times their wave height, speed ahead of waves
with shorter wavelengths. This sorting by wavelength is called wave dispersion.
From crest to crest there is little variation although overtime the waves slow down.

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
These ideal deepwater ocean waves are called swells and are the simplest to
describe mathematically. They are modeled as monochromatic linear plane waves,
or waves with constant wavelength, period, and height. The water particles trace out
circular orbits as swells pass.
As the swells approach the coast, their form becomes dependent on the
bathymetry. In shallow water, characterized by a depth of less than half the
wavelength, the waves begin to drag on the bottom and the water particles trace
elliptical orbits. The periods remain constant as the wave speeds decrease,
consequently wavelengths shrink, and amplitudes increase. These peaked waves
are unstable and start to break. Then the water particles no longer complete a
closed loop, but have positive longitudinal trajectories. This net forward motion is
known as Stokes drift.
Oceanic waves may be approximated mathematically by a sine wave, and
therefore exhibit a smooth, regular oscillation. Other wave motions exist on the
ocean including internal waves, tides, and edge waves. How wind causes water to
form waves is easy to understand although many intricate details still lack a
satisfactory theory. On a perfectly calm sea, the wind has practically no grip. As it
slides over the water surface film, it makes it move. As the water moves, it forms
eddies and small ripples. Ironically, these ripples do not travel exactly in the
direction of the wind but as two sets of parallel ripples, at angles 70-80º to the wind
direction. The ripples make the water's surface rough, giving the wind a better grip.
The ripples, starting at a minimum wave speed of 0.23 m/s, grow to wavelets and
start to travel in the direction of the wind. At wind speeds of 7-11 km/hr, these
double wave fronts travel at about 30º from the wind. The surface still looks glassy
overall but as the wind speed increases, the wavelets become high enough to
interact with the air flow and the surface starts to look rough. The wind becomes
turbulent just above the surface and starts transferring energy to the waves. Strong
winds are more turbulent and make waves more easily. As waves enter shallow
water, they slow down, grow taller and change shape. At a depth of half its wave
length, the rounded waves start to rise and their crests become shorter while their
troughs lengthen. Although their period (frequency) stays the same, the waves
slow down and their overall wave length shortens. The 'bumps' gradually steepen
and finally break in the surf when depth becomes less than 1.3 times their height.

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Note that waves change shape in depths depending on their wave length, but
break in shallows relating to their height.
Figure-1
i.) Knowledge of these waves and the forces they generate is essential for the
design of coastal projects since they are the major factor that determines the
geometry of beaches, the planning and design of marinas, waterways, shore
protection measures, hydraulic structures, and other civil and military coastal
works. Estimates of wave conditions are needed in almost all coastal engineering
studies. The purpose of this lecture is to give engineers theories and
mathematical formulae for describing ocean surface waves and the forces,
accelerations, and velocities due to them. Fetch is the area of contact between
the wind and the water and is where wind-generated waves begin. There are
mainly two types of waves- Regular Waves and Irregular Waves. There are three
types of waves defined by water depth: Deep-water wave, Intermediate-water
wave, and Shallow-water wave.
ii.) In the Regular Waves, the objective is to provide a detailed understanding of the
mechanics of a wave field through examination of waves of constant height and
period. In the Irregular Waves, the objective is to describe statistical methods for
analyzing irregular waves (wave systems where successive waves may have
differing periods and heights), which are more descriptive of the waves seen in
nature.
iii.) In looking at the sea surface, it is typically irregular and three-dimensional (3-D).
The sea surface changes in time, and thus, it is unsteady. Vertical displacement
of the sea surface from the still water level (SWL) as a function of time and space
and is known as Wave profile (η ).The vertical distance from the still water level to
the wave crest is Wave amplitude. At this time, this complex, time-varying 3-D
surface cannot be adequately described in its full complexity; neither can the

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
velocities, pressures, and accelerations of the underlying water required for
engineering calculations. In order to arrive at estimates of the required
parameters, a number of simplifying assumptions must be made to make the
problems tractable, reliable and helpful through comparison to experiments and
observations. Some of the assumptions and approximations that are made to
describe the 3-D, time-dependent complex sea surface in a simpler fashion for
engineering works may be unrealistic, but necessary for mathematical reasons.
The Regular Waves begins with the simplest mathematical representation
assuming ocean waves are two-dimensional (2-D), small in amplitude, sinusoidal,
and progressively definable by their wave height and period in a given water
depth. In this simplest representation of ocean waves, wave motions and
displacements, kinematics (that is, wave velocities and accelerations), and
dynamics (that is, wave pressures and resulting forces and moments) will be
determined for engineering design estimates. When wave height becomes larger,
the simple treatment may not be adequate. The next part of the Regular Waves
considers 2-D approximation of the ocean surface to deviate from a pure sinusoid.
This representation requires using more mathematically complicated theories.
These theories become nonlinear and allow formulation of waves that are not of
purely sinusoidal in shape; for example, waves having the flatter troughs and
peaked crests typically seen in shallow coastal waters when waves are relatively
high.
iv.) The Irregular Waves is devoted to an alternative description of ocean waves.
Statistical methods for describing the natural time-dependent three-dimensional
characteristics of real wave systems are presented. A complete 3-D
representation of ocean waves requires considering the sea surface as an
irregular wave train with random characteristics. To quantify this randomness of
ocean waves, the Irregular Waves employs statistical and probabilistic theories.
Even with this approach, simplifications are required. One approach is to
transform the sea surface using Fourier theory into summation of simple sine
waves and then to define a wave’s characteristics in terms of its spectrum. This
allows treatment of the variability of waves with respect to period and direction of
travel. The second approach is to describe a wave record at a point as a
sequence of individual waves with different heights and periods and then to

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
consider the variability of the wave field in terms of the probability of individual
waves.
v.) At the present time, practicing coastal engineers must use a combination of these
approaches to obtain information for design. Information from the Irregular Waves
will be used to determine the expected range of wave conditions and directional
distributions of wave energy in order to select an individual wave height and
period for the problem under study. However, it should be noted that the
procedures for selecting and using irregular wave conditions remain an area of
some uncertainty.
vi.) The major generating force for waves is the wind acting on the air-sea interface.
A significant amount of wave energy is dissipated in the near shore region and on
beaches. Wave energy forms beaches; sorts bottom sediments on the shore face,
transports bottom materials onshore, offshore, and alongshore; and exert forces
upon coastal structures. A basic understanding of the fundamental physical
processes in the generation and propagation of surface waves must precede any
attempt to understand complex water motion in seas, lakes and waterways. The
Regular Waves outlines the fundamental principles governing the mechanics of
wave motion essential in the planning and design of coastal works. The Irregular
Waves discusses the applicable statistical and probabilistic theories. The simplest
wave theory is the first-order, small-amplitude, or Airy wave theory which will
hereafter be called linear theory. Many engineering problems can be handled with
ease and reasonable accuracy by this theory. For convenience, prediction
methods in coastal engineering generally have been based on simple waves. For
some situations, simple theories provide acceptable estimates of wave conditions.
vii.) When waves become large or travel toward shore into shallow water, higher-order
wave theories are often required to describe wave phenomena. These theories
represent nonlinear waves. The linear theory that is valid when waves are
infinitesimally small and their motion is small also provides some insight for finite-
amplitude periodic waves (nonlinear). However, the linear theory cannot account
for the fact that wave crests are higher above the mean water line than the
troughs are below the mean water line. Results obtained from the various theories
should be carefully interpreted for use in the design of coastal projects or for the
description of coastal environment.

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
viii.) Any basic physical description of a water wave involves both its surface form and
the water motion beneath the surface. A wave that can be described in simple
mathematical terms is called a simple wave. Waves comprised of several
components and difficult to describe in form or motion are termed wave trains or
complex waves. Sinusoidal or monochromatic waves are examples of simple
waves, since their surface profile can be described by a single sine or cosine
function. A wave is periodic if its motion and surface profile recur in equal intervals
of time termed the wave period. A wave form that moves horizontally relative to a
fixed point is called a progressive wave and the direction in which it moves is
termed the direction of wave propagation. A progressive wave is called wave of
permanent form if it propagates without experiencing any change in shape. Water
waves are considered oscillatory or nearly oscillatory if the motion described by
the water particles is circular orbits that are closed or nearly closed for each wave
period. The linear theory represents pure oscillatory waves. Waves defined by
finite-amplitude wave theories are not pure oscillatory waves but still periodic
since the fluid is moved in the direction of wave advance by each successive
wave. This motion is termed mass transport of the waves. When water particles
advance with the wave and do not return to their original position, the wave is
called a wave of translation. A solitary wave is an example of a wave of
translation.
ix.) It is important in coastal practice to differentiate between two types of surface
waves. These are seas and swells. Seas refer to short-period waves still being
created by winds. Swells refer to waves that have moved out of the generating
area. In general, swells are more regular waves with well-defined long crests and
relatively long periods. Seiches are standing waves of relatively long period, and
often form at the cessation of winds which produce storm surge.
x.) The growth of wind-generated oceanic waves is not indefinite. The point when
waves stop growing is termed a fully developed sea condition. Wind energy is
imparted to the water leading to the growth of waves; however, after a point, the
energy imparted to the waters is dissipated by wave breaking. Seas are short-
crested and irregular and their periods are within the 3 to 25 sec range. Seas
usually have shorter periods and lengths, and their surface appears much more
disturbed than for swells. Waves assume a more orderly state with the

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
appearance of definite crests and troughs when they are no longer under the
influence of winds (swell).
Modeling Waves
Unfortunately neither shallow water waves nor deepwater waves present an
easy solution to model. Although a single set of deepwater open ocean waves is
mathematically the simplest to describe, at a given location there is never a single set
of easily identifiable swells. The surface is a jumble of converging sets that amplify
and cancel each other. The surface of the open ocean experiences huge energy
fluxes and directional changes. The shallow water waves, though more difficult to
mathematically model, are directionally more predictable, since they depend heavily
on the physical features of the ocean bottom.
This study is limited to the mathematical modeling of the energy contained in one
train of deepwater waves.
The shape of ocean waves is best approximated by a trochoid curve. This curve, also
known as a curtate cycloid, is the locus of a point at a distance b from the center of a
circle of radius a rolling along a fixed line. A trochoid is defined by the following
parametric equations when ab < :
tbatx sin−= tbay cos−= (1.0)
As can be seen in figure 2, a trochoid curve is well approximated by a sine wave of
the same amplitude, period, and frequency, while the amplitudes remain small
compared to the wavelength, as is the case with deepwater waves. In the figure, the
amplitude is roughly 8% of the wavelength. Since a negligible amount of error is
incurred with this approximation, it is convenient to model the deepwater waves as
familiar sinusoidal functions. The waves are now modeled as dispersive waves and
are define as simple harmonic waves propagating through a given medium with wave
speeds dependent on wavelengths.

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Figure 1
Surf breakers
These are classified in three types:
Spilling breakers: result from waves of low steepness (long period swell) over
gentle slopes. They cause rows of breakers, rolling towards the beach. Such
breakers gradually transport water towards the beach during groups of high waves.
Rips running back to sea, transport this water away from the beach. This is where
water moves towards the beach. The next group of tall waves should assist you to
swim back to shore. However, when launching (rescue) boats, this is best done in a
rip zone.
Plunging breakers: result from steeper waves over moderate slopes. The slope of a
beach is not constant but may change with the tide. Some beaches are steep toward
high tide, others toward low tide. A plunging breaker is dangerous for swimmers
because its intensity is greatly augmented by backwash from its predecessor. This
strong backwash precludes easy exit from the breaker zone, particularly for divers.
Often a steep bank of loose sand prevents one from standing upright. In order to exit
safely, wait for a group of low waves.
Surging breakers: occur where the beach slope exceeds wave steepness. The
wave does not really curl and break but runs up against the shore while producing
foam and large surges of water. Such places are dangerous for swimmers because
the rapidly moving water can drag swimmers over the rocks.
Regular Waves

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Wave theories are approximations to reality. They may describe some phenomena
well under certain conditions that satisfy the assumptions made in their derivation.
They may fail to describe other phenomena that violate those assumptions. In
adopting a theory, care must be taken to ensure that the wave phenomenon of
interest is described reasonably well by the theory adopted, since shore protection
design depends on the ability to predict wave surface profiles and water motion, and
on the accuracy of such predictions.
Characteristics of wave motion
Waves impart vertical, circular orbits to individual parcels of water without any
substantial net horizontal movement
♦ orbital diameter of water parcels at the surface approximately equals the wave
height
♦ vertical motion becomes negligible at depths greater than about one-half the
wavelength (i.e., L/2)
♦ motion in water depths exceeding L/2 (and therefore unaffected by the ocean
bottom) will produce deep water waves
♦ circular orbits of water parcels become flattened as a result of bottom interference
and form shallow water waves
The speed of shallow water waves is independent of wavelength or wave period and
is controlled by the depth of water. The speed of deep water waves is independent of
the depth and is determined by wavelength and period. Deep water waves are
therefore dispersive (i.e., wave speed is frequency dependent) and wave separation
will occur according to celerity, length, and period in the 'open' ocean. Any
complicated ocean wave surface can therefore be constructed (theoretically) by a
combination of simple sine waves of different height, period, and phase.
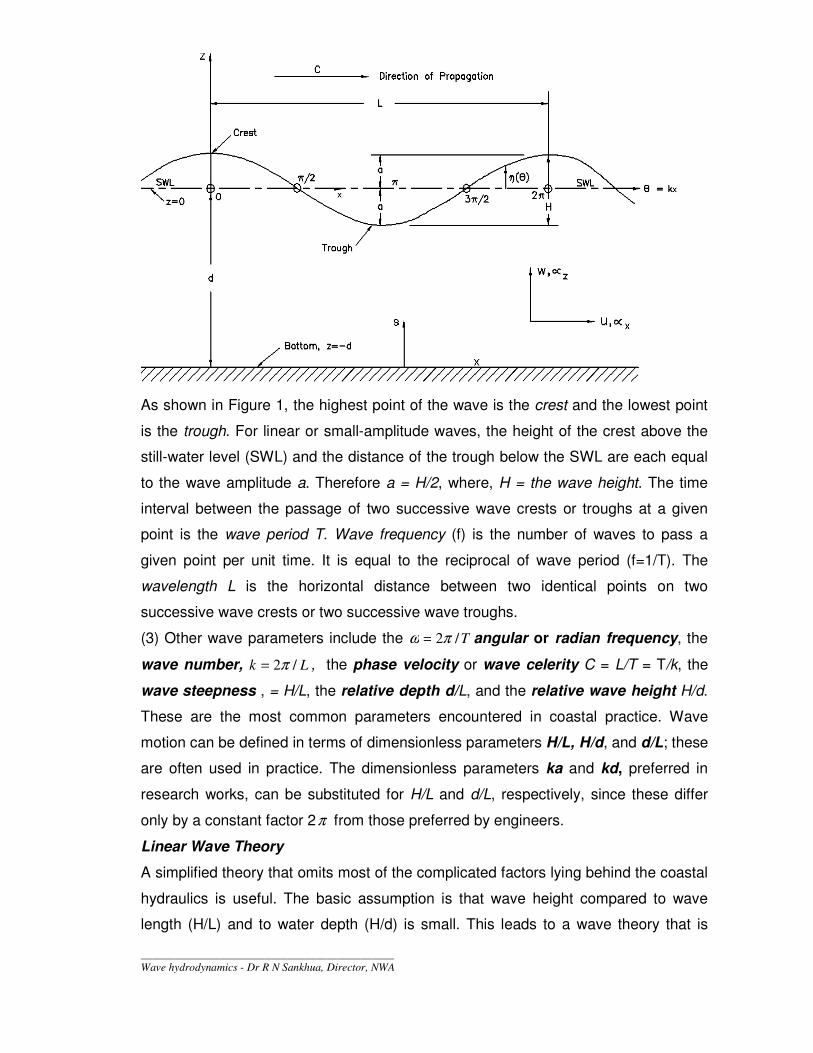
(1) A progressive wave may be represented by the variables x (spatial) and t
(temporal) or by their combination (phase), defined as η = kx - ϖ t, where k and
ϖ are described in the following paragraphs. The values of η vary between 0 and 2π .
Figure 1 depicts parameters that define a simple, progressive wave as it passes a
fixed point in the ocean. A simple, periodic wave of permanent form propagating over
a horizontal bottom may be completely characterized by the wave height H
wavelength L and water depth d.
_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
As shown in Figure 1, the highest point of the wave is the crest and the lowest point
is the trough. For linear or small-amplitude waves, the height of the crest above the
still-water level (SWL) and the distance of the trough below the SWL are each equal
to the wave amplitude a. Therefore a = H/2, where, H = the wave height. The time
interval between the passage of two successive wave crests or troughs at a given
point is the wave period T. Wave frequency (f) is the number of waves to pass a
given point per unit time. It is equal to the reciprocal of wave period (f=1/T). The
wavelength L is the horizontal distance between two identical points on two
successive wave crests or two successive wave troughs.
(3) Other wave parameters include the T/2πω = angular or radian frequency, the
wave number, Lk /2π= , the phase velocity or wave celerity C = L/T = T/k, the
wave steepness , = H/L, the relative depth d/L, and the relative wave height H/d.
These are the most common parameters encountered in coastal practice. Wave
motion can be defined in terms of dimensionless parameters H/L, H/d, and d/L; these
are often used in practice. The dimensionless parameters ka and kd, preferred in
research works, can be substituted for H/L and d/L, respectively, since these differ
only by a constant factor 2π from those preferred by engineers.
Linear Wave Theory
A simplified theory that omits most of the complicated factors lying behind the coastal
hydraulics is useful. The basic assumption is that wave height compared to wave
length (H/L) and to water depth (H/d) is small. This leads to a wave theory that is

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
variously called small amplitude, theory linear theory, airy theory, first order theory.
Since waves occurring in nature have the wave steepness H/L usually at most 0.05
to 0.08, one could believe that the linearization represents a good approximation for
all practical purposes. Thus all terms in the order of (H2 /L2) can be neglected in
comparison with terms (H/L).
The theory developed by using this approximation which is called Small Amplitude
Wave Theory provides insight for all periodic wave behaviour and it is adequately
used for most coastal engineering problems. For some situations, waves are better
described by these higher-order theories, which are usually referred to as finite-
amplitude wave theories
The assumptions made in developing the Linear Wave Theory are:
1. Homogeneous and incompressible
2. Surface tension can be neglected
3. Coriolis effect due to the earth's rotation neglected
4. Ideal fluid & density is constant
5. Flat impermeable bottom
6. Pressure at the free surface is uniform and constant
7. Normal forces important and shearing forces negligible
8. Bed horizontal, fixed, impermeable boundary, vertical velocity at bed
zero
9. Amplitude small, invariant in time & space
10. Waves are plane or long-crested (2D).
Linear theory cannot account for wave crests higher above mean WL than
troughs below Mean WL. We can accept 1, 2, and 3 and relax assumptions 4-10 for
most practical solutions. The wave amplitude is small and the waveform is invariant
in time and space. Waves are plane or long-crested (two-dimensional).
Wave Celerity, Length, & Period
For studying the wave mechanics the classification of ocean water is done like this:
Classification d/L kd tanh (kd)
Deep water 1/2 to infinity π - ∞ 1
Transitional 1/20 to 1/2
10
π to π
tanh(kd)
Shallow water 0 to 1/20 0 to
10
π
kd
For small amplitude waves: (waves are two dimensional)

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
11 <<<<d
Hand
L
H is valid.
Phase Velocity/Wave Celerity: If C is the speed at which a waveform moves, then,
)1.(........n
eqTime
Length
T
LC ==
Relating wavelength and Water depth to celerity, then
Since C = L/T, then eqn 2 is
It is to note that L exists on both sides of the equation.
When d/L >0.5 = Deep Water Condition
Here,
Since g = 9.81 m/sec2
Since C0=L/T, for deep water
So for DEEP WATER:
In transitional water, 2
1
25
1tofrom
L
d= , then solving eqn …2, we get
Kinetic + Potential = Total Energy of Wave System, where,
Kinetic: due to Water particle velocity

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Potential: due to part of fluid mass being above trough. (i.e. wave crest)
Thus, we have
Group Velocity =k
w
∂
∂=Cg
05.0sin CCceCEP gg == , For Deep and transitional Water, Cg<C0, e.g., Cg=0.5C0,
and gdCCg ==
P0= 0.5E0C0
Shallow Water, CECEP g == , since Cg=C, Thus, gdEP =
Governing Equations
Let us assume that the fluid is incompressible and only irrotational motion takes place.
Basic hydrodynamics tells us that a velocity potential will exist which will satisfy the
continuity equation. Therefore, the following equation will hold.
In three dimensions, this is the Laplace equation and is written as
The Laplace equation is linear and therefore any solutions can be combined linearly
to yield more solutions.
Boundary Conditions
Bottom z=-h: zero normal velocity
Free Surface z=0, Dynamic: P = Pa
Kinematic: free-surface velocity = particle velocity in normal direction
_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
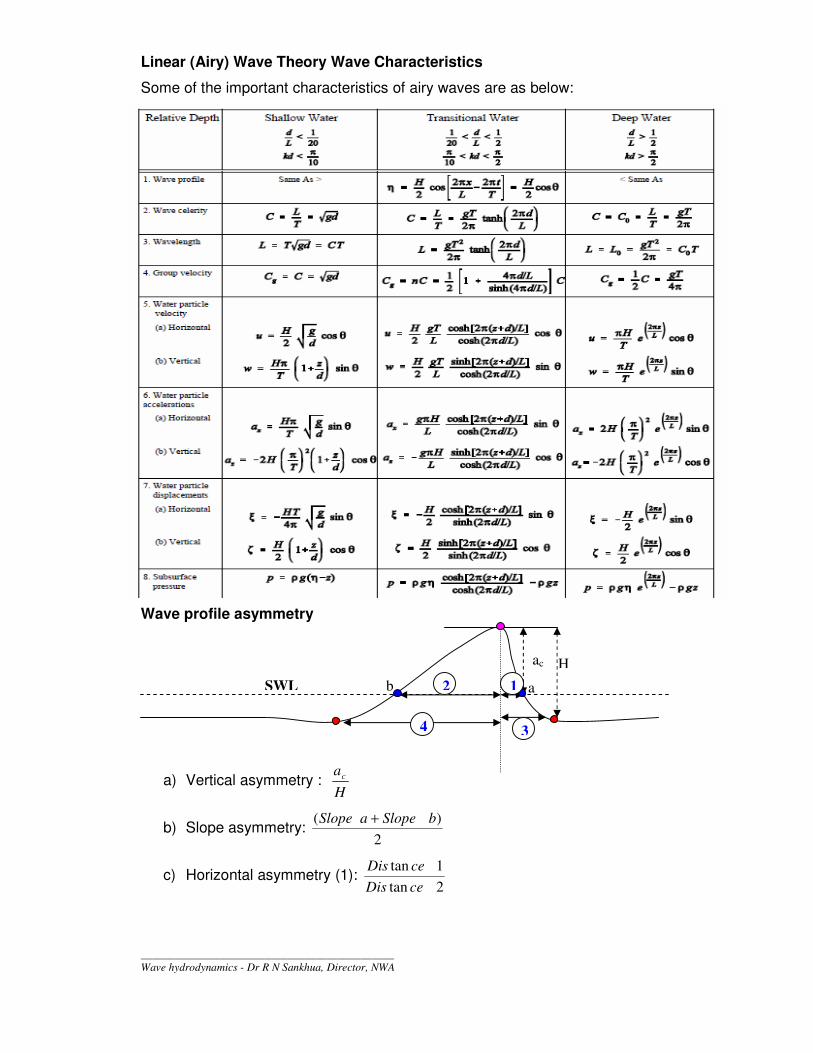
Linear (Airy) Wave Theory Wave Characteristics
Some of the important characteristics of airy waves are as below:
Wave profile asymmetry
a) Vertical asymmetry : H
ac
b) Slope asymmetry: 2
)( bSlopeaSlope +
c) Horizontal asymmetry (1): 2tan
1tan
ceDis
ceDis
SWL
H ac
b a
4
1 2
3

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
d) Horizontal asymmetry (2): 4tan
3tan
ceDis
ceDis
Wave Shoaling
Shoaling occurs as as the waves enter shallower water. The wave speed and wave
length decrease in shallow water, therefore the energy per unit area of the wave has
to increase, so the wave height increases. The wave period remains the same in
shoaling. (The wave period is the time it takes for a wave crest to travel the distance
of one wave length.) When the wave crest becomes too steep, it becomes unstable,
curling forward and breaking. This usually happens when the height of the wave
becomes about the same size as the local water depth. That is, a 10 ft high wave
usually breaks in about 10 feet of water.
Wave Refraction
Refraction is the bending of waves because of varying water depths underneath. The
part of a wave in shallow water moves slower than the part of a wave in deeper water.
So, when the depth under a wave crest varies along the crest, the wave bends. An
example of refraction is when waves approach a straight shoreline at an angle. The
part of the wave crest closer to shore is in shallower water and moving slower than
the part away from the shore in deeper water. The wave crest in deeper water
catches up so that the wave crest tends to become parallel to the shore. It also
occurs around a circular island. The wave approaching from one direction will wrap
around the island so the wave crest will approach the beach close to parallel on all
sides of the island.
Wave Diffraction
Diffraction usually happens when waves encounter surface-piercing obstacle, such
as a breakwater or an island. It would seem that on the lee side of the island, the
water would be perfectly calm; however it is not. The waves, after passing the island,
turn into the region behind the island and carry wave energy and the wave crest into
this so-called 'shadow zone.' The turning of the waves into the sheltered region is
due to the changes in wave height (along the crest) in the same wave.
Nonlinear wave theories
Linear waves as well as finite-amplitude waves may be described by specifying two
dimensionless parameters, the wave steepness H/L and the relative water depth d/L.
The Relative depth determines whether waves are dispersive or non-dispersive and
whether the celerity, length, and height are influenced by water depth. Wave

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
steepness is a measure of how large a wave is relative to its height and whether the
linear wave assumption is valid. Large values of the wave steepness suggest that the
small-amplitude assumption may be questionable. A third dimensionless parameter,
which may be used to replace either the wave steepness or relative water depth, may
be defined as the ratio of wave steepness to relative water depth.
H/d is the relative wave height. Like the wave steepness, large values of the relative
wave height indicate that the small-amplitude assumption may not be valid. A fourth
dimensionless parameter often used to assess the relevance of various wave
theories is termed the Ursell number. The Ursell number is given by,3
2
d
HL.
(b) The value of the Ursell number is often used to select a wave theory to describe a
wave with given L and H (or T and H) in a given water depth d. High values of UR
indicate large, finite amplitude, long waves in shallow water that may necessitate the
use of nonlinear wave theory.
(c) The linear or small-amplitude wave theory described in the preceding paragraphs
provides a useful first approximation to the wave motion. Ocean waves are generally
not small in amplitude. In fact, from an engineering point of view it is usually the large
waves that are of interest since they result in the largest forces and greatest
sediment movement. In order to approach the complete solution of ocean waves
more closely, a perturbation solution using successive approximations may be
developed to improve the linear theory solution of the hydrodynamic equations for
gravity waves. Each order wave theory in the perturbation expansion serves as a
correction and the net result is often a better agreement between theoretical and
observed waves. The extended theories can also describe phenomena such as
mass transport where there is a small net forward movement of the water during the
passage of a wave. These higher-order or extended solutions for gravity waves are
often called nonlinear wave theories.
(d) Development of the nonlinear wave theories has evolved for a better description
of surface gravity waves. These include cnoidal, solitary, and Stokes theories.
However, the development of a Fourier-series approximation by Fenton in recent
years has superseded the previous historical developments. Fenton's theory is
recommended for regular waves in all coastal applications.
Stokes Finite-Amplitude Wave Theory

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
(a) The fifth-order Stokes finite-amplitude wave theory is widely used in practical
applications both in deep- and shallow-water wave studies. A formulation of Stokes
fifth-order theory with good convergence properties has recently been provided
(Fenton 1985). Fenton's fifth-order Stokes theory is computationally efficient, and
includes closed-form asymptotic expressions for both deep- and shallow-water limits.
Kinematics and pressure predictions obtained from this theory compare with
laboratory and field measurements better than other nonlinear theories.
Cnoidal Wave Theory
(a) Korteweg and de Vries (1895) developed a wave theory termed the cnoidal
theory. The cnoidal theory is applicable to finite-amplitude shallow-water waves and
includes both nonlinearity and dispersion effects. Cnoidal theory is based on the
Boussinesq, but is restricted to waves progressing in only one direction. The theory is
defined in terms of the Jacobian elliptic function, cn, hence the name cnoidal.
Cnoidal waves are periodic with sharp crests separated by wide flat troughs.
(b) The approximate range of validity of the Cnoidal theory is d/L < 1/8 when the
Ursell number UR >20. As wavelength becomes long and approaches infinity,
Cnoidal wave theory reduces to the solitary wave theory. Also, as the ratio of wave
height to water depth becomes small the wave profile approaches the sinusoidal
profile predicted by the linear theory.
Conclusion
The theory of wave hydrodynamics can search for a credible solution for coastal
engineers in predicting the danger or in alleviating the impact, modelling of tsunami
wave and propagation across oceans and their impact on coastlines considering the
aspects of modelling of large ocean waves.
References
1) R M. Sorensen,(1993), Basic Wave Mechanics: For Coastal and Ocean
Engineers, Willey Publishers
2) Water Wave Mechanics, Coastal Engineering Manual, USACE,

_____________________________________________
Wave hydrodynamics - Dr R N Sankhua, Director, NWA
Tutorial on
Wave Hydrodynamics
(Dt- 23.8.2010) EXERCISE - 1
Given: A surface wave in 100m deep water has a period of 10sec and wave height of 2m
Calculate the following:
a) Determine the wave length, celerity and wave steepness?
b) What is the water particle speed at the wave crest? (Hint: diameter at the
surface = wave height)
c) Maximum Wave Heights for wave length of 156m for deep water condition and
shallow water depth of 3m.
d) Vertical asymmetry if difference between SWL and peak of wave is 6m.
e) Slope asymmetry if the slopes are 0.5 and 0.7 radians at both the wave legs.
f) Horizontal asymmetry, (1) if the wave meets SWL at 10m and 6m respectively
on both left and right side of the wave peak.
g) Surge height if the Expected High Tide line is at 65t and SWL is at 75mts.
h) Wave run up if the wave touches at 80mts height at the beach.
i) Magnitude of storm tide if the MWL and MSL are respectively 82m and 60mt.
EXERCISE - 2
Given: An ocean surface wave with a period T = 10 sec is propagated shoreward over a uniformly sloping shelf from a depth d = 200 m to a depth d = 3 m.
Find: The wave celerities C and lengths L corresponding to depths d = 200 meters and d = 3 m. Use the following as guideline:
Classification d/L kd tanh (kd)
Deep water 1/2 to ∞ ∞toπ 1
Transitional 1/20 to 1/2 ππ to10/ tanh (kd)
Shallow water 0 to 1/20 10/0 πto kd