weather routing of motorsailers - hiswa symposium · 1 weather routing of motorsailers daan...
TRANSCRIPT

1
Weather routing of motorsailers
Daan Sparreboom , Mark Leslie Miller
August 2012
1 Introduction Weather routing can be described as the process of finding a route between a departure and
destination point in such a way that a chosen objective is optimized while taking into account effects
of the environment. These effects include wind, waves and current. The chosen objective for
instance can be cost, time, fuel consumption or a measure of comfort or safety.
There is a close correlation between a ship’s performance and the environment it sails in. Even more
so when the ship is (partly) propelled by wind. This is the case for sailing ships, but also for ships with
kites and Flettner rotors [Enercon E-ship]. Weather routing is therefore very important for the design
and operation of these kinds of ships. One application is the Ecoliner, a concept design for a 4 mast
dynarig multipurpose cargo ship currently in design at Dykstra Naval Architects [DNA] and an
initiative of Fairtransport [Fairtransport], see figure 1. More information about the Ecoliner can be
found in [Nikkels]. Another application is Rainbow Warrior III [Rainbow Warrior III], the Green peace
flagship with a staysail schooner rig.
Figure 1: The Ecoliner concept design [DNA]
Wind propulsion is used to reduce fuel consumption. However, in order to keep a schedule, this can
be combined with the use of an engine. This complicates the routing process since it introduces an
extra degree of freedom to the optimization: the engine setting. When only sails are used, the speed
depends solely on the chosen course; this is one degree of freedom. When an engine is also used,
both course and engine setting can be chosen.
The extra cost of a ship equipped for wind propulsion must be related to the savings in fuel it
realizes. The main question raised when presenting a design of a sail assisted cargo ship is: ‘how
much fuel can be saved by using sails?’ This research focuses on weather routing of ships that are
propelled by both wind propulsion and an engine, here called motorsailers for brevity. By using
routing simulations for the intended operating track, an estimate of the fuel consumption can be
made and the question of how much fuel is saved by installing a wind propulsion rig can be
answered.

2
2 Research goal The main goal of this research is to apply weather routing to the design process of motorsailers.
Since the goal of using sails is to save fuel in cargo shipping, fuel consumption is an important design
property. Another design property is the duration of a crossing since the transport capacity and
therefore the income depend on the time needed for a crossing. The main goal can be split up into
the following sub goals:
- Creating a model of the ship to calculate ship performance under various circumstances - Finding a routing algorithm that can optimize routes for both time and fuel consumption - Applying the methods to the evaluation of a motorsailer design
In order for a routing algorithm to find possible routes, the ship’s speed and fuel consumption must
be known. These parameters must be calculated for all admissible values of control parameters and
external parameters.
The current methods and programs are unfit for routing of motorsailers [Sparreboom] [Motte]. This
research aims to fill that gap and find a method that can be used for the routing of motorsailers with
a variable engine setting.
To illustrate the methods derived and to show their relevance and possibilities, routing is used as a
design tool for the design of the Ecoliner. By doing this, an answer can be given to the question: ‘How
much fuel can be saved by using sails on a cargo ship?’
3 Modeling the ship performance Since this research focuses on optimizing time and fuel consumption, the ship speed and fuel
consumption rate are the most important performance parameters. In order to calculate the ship
performance in various circumstances, a velocity prediction program (VPP) is used. The VPP
described here is based on data on the hull, sails and engine. These data can be obtained from model
experiments in the wind tunnel and towing tank, CFD calculations, full scale measurements or
empiric methods.
The VPP is very similar to the Windesign VPP [Windesign], a commercially available VPP for sailing
ships. It was chosen to build a new program in Matlab for three reasons: Windesign does not support
the modeling of an engine and propeller, independent wave conditions cannot be entered in
Windesign and a new program can be automated to produce lookup tables while manual iterations
would be needed when using Windesign for this.
The propeller is modeled as an additional longitudinal force on the hull. The pitch can be varied and
is chosen to require 85% of the engine maximum at the given engine RPM setting. The fuel
consumption is calculated from the specific fuel consumption of the engine. When the engine is
turned off, the fuel consumption only consists of the fuel consumption at the hotel load and the
propeller causes drag.
The added resistance in waves is calculated by using the significant wave height and mean period in a
Bretschneider spectrum. Together with the hull’s RAO for added resistance in waves and the mean
wave angle the added resistance in waves can be calculated for head to beam waves using strip
theory.

3
The most important simplifications made in the ship model are:
- Steady state presumption - No drag due to rudder angle is present and the total yawing moment is presumed zero - Following waves have no effect on the time-average ship response - Leeway is small enough to assume sin(λ)=0 and cos(λ)=1
The calculation time for one set of conditions is in the order of 0.2 seconds which is too much for
direct use in a routing algorithm. For this reason, the ship performance must be calculated previous
to the routing algorithm for various conditions. By presenting these data in a lookup table, the
routing algorithm can quickly find the ship performance. The variables influencing the ship
performance are:
- Engine setting - Wind speed and angle - Significant wave height, mean wave period and mean wave angle - Current speed and angle
To create a lookup table with these eight dimensions at a high resolution will require too much
computer memory which makes this option infeasible. Consequently, the method chosen here is to
use wind polars for multiple engine settings for finding the ship’s speed at given true wind speed and
-angle. The wind polars are corrected for leeway and velocity made good.
The effect of waves is incorporated by using a factor on the speed. This factor depends on the
significant wave height, mean wave period and wave angle. These factors will be included in a so
called wave polar. The speed change not only depends on the wave parameters, so this is a
simplification. It also depends on effects on the sails, hull and propeller by the speed change itself.
However, to limit the number of dimensions in the speed polar, a wave polar is a good option.
4 Routing using Maxsea Time Zero Maxsea Time zero (T0) is a commercially available routing program intended mainly for sailing yachts
and other sailing vessels [Maxsea]. In order to use T0 for routing of motorsailers, a minimum sailing
speed is used. Routing with a minimum speed simulates using the engine when the wind is
insufficient to reach the selected minimum speed. This ensures that the engine power is used
efficiently. The idea was introduced in [Dijkstra].
Routing simulations are performed for multiple wind polars with different minimum speeds of 0, 6, 8,
10 and 12 knots. For each minimum speed a routing is performed and the results of these are used
for calculation of the fuel consumption. The T0 routing output is combined with information on the
ship to obtain the required propeller force. The speed through the water, true wind speed and angle,
current speed and direction and sail set are used. From the required propeller force, the fuel
consumption can be calculated from propeller and engine information.
The chosen route is a crossing of the Atlantic from east to west. The weather information is obtained
from a GRIB file with an acceptable spatial resolution of 1 degree. The time step is set at 6 hours. The
maximum acceptable wind speed is set at 125 knots and the maximum wave height is at 20 meters.
4
The hotel load is also included in the fuel consumption because a longer trip will cause higher fuel
consumption due to the hotel load. The hotel load is assumed to be 100 kW and the generator is
assumed to have a specific fuel consumption of 260 g/kWh.
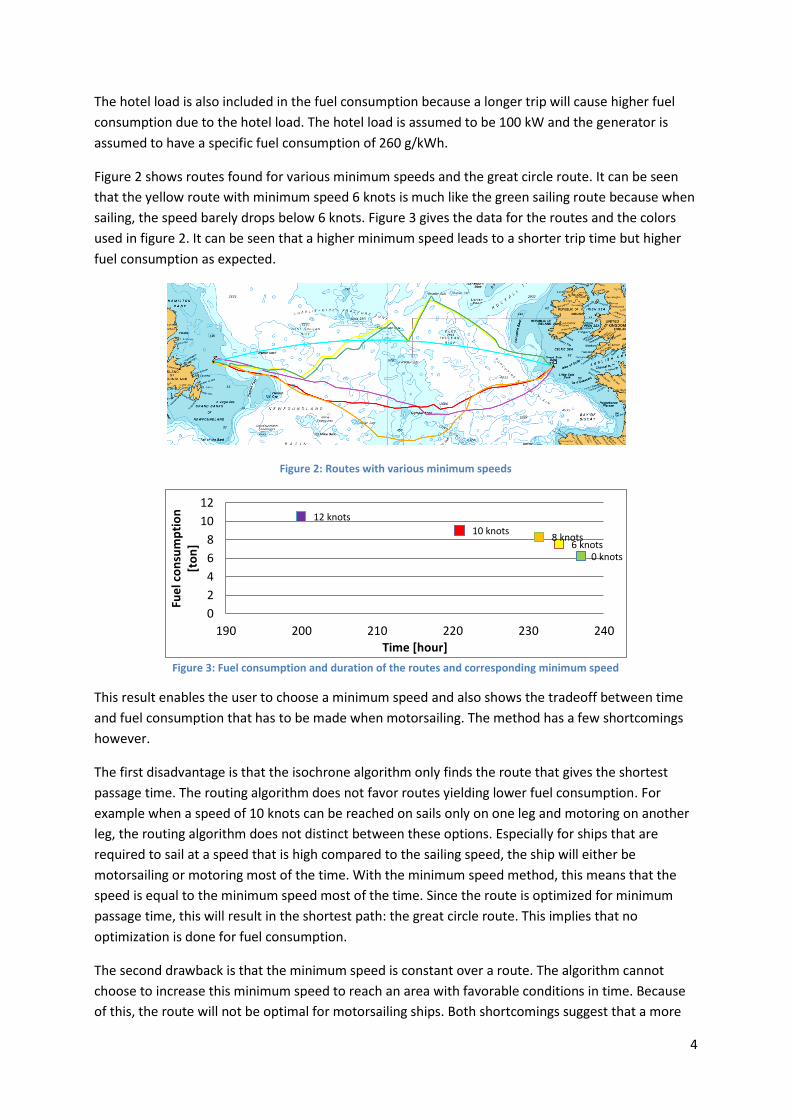
Figure 2 shows routes found for various minimum speeds and the great circle route. It can be seen
that the yellow route with minimum speed 6 knots is much like the green sailing route because when
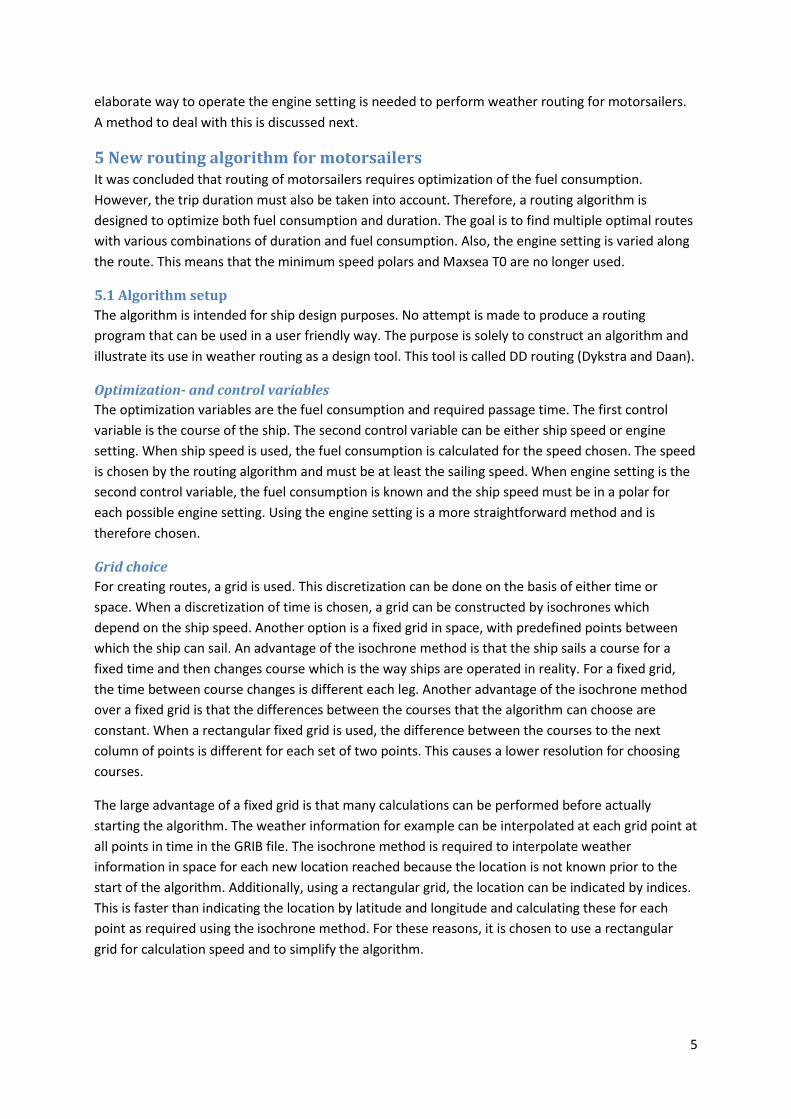
sailing, the speed barely drops below 6 knots. Figure 3 gives the data for the routes and the colors
used in figure 2. It can be seen that a higher minimum speed leads to a shorter trip time but higher
fuel consumption as expected.
Figure 2: Routes with various minimum speeds
Figure 3: Fuel consumption and duration of the routes and corresponding minimum speed
This result enables the user to choose a minimum speed and also shows the tradeoff between time
and fuel consumption that has to be made when motorsailing. The method has a few shortcomings
however.
The first disadvantage is that the isochrone algorithm only finds the route that gives the shortest
passage time. The routing algorithm does not favor routes yielding lower fuel consumption. For
example when a speed of 10 knots can be reached on sails only on one leg and motoring on another
leg, the routing algorithm does not distinct between these options. Especially for ships that are
required to sail at a speed that is high compared to the sailing speed, the ship will either be
motorsailing or motoring most of the time. With the minimum speed method, this means that the
speed is equal to the minimum speed most of the time. Since the route is optimized for minimum
passage time, this will result in the shortest path: the great circle route. This implies that no
optimization is done for fuel consumption.
The second drawback is that the minimum speed is constant over a route. The algorithm cannot
choose to increase this minimum speed to reach an area with favorable conditions in time. Because
of this, the route will not be optimal for motorsailing ships. Both shortcomings suggest that a more
0 knots 6 knots
8 knots 10 knots
12 knots
0
2
4
6
8
10
12
190 200 210 220 230 240
Fue
l co
nsu
mp
tio
n
[to
n]
Time [hour]
5
elaborate way to operate the engine setting is needed to perform weather routing for motorsailers.
A method to deal with this is discussed next.
5 New routing algorithm for motorsailers It was concluded that routing of motorsailers requires optimization of the fuel consumption.
However, the trip duration must also be taken into account. Therefore, a routing algorithm is
designed to optimize both fuel consumption and duration. The goal is to find multiple optimal routes
with various combinations of duration and fuel consumption. Also, the engine setting is varied along
the route. This means that the minimum speed polars and Maxsea T0 are no longer used.
5.1 Algorithm setup
The algorithm is intended for ship design purposes. No attempt is made to produce a routing
program that can be used in a user friendly way. The purpose is solely to construct an algorithm and
illustrate its use in weather routing as a design tool. This tool is called DD routing (Dykstra and Daan).
Optimization- and control variables
The optimization variables are the fuel consumption and required passage time. The first control
variable is the course of the ship. The second control variable can be either ship speed or engine
setting. When ship speed is used, the fuel consumption is calculated for the speed chosen. The speed
is chosen by the routing algorithm and must be at least the sailing speed. When engine setting is the
second control variable, the fuel consumption is known and the ship speed must be in a polar for
each possible engine setting. Using the engine setting is a more straightforward method and is
therefore chosen.
Grid choice
For creating routes, a grid is used. This discretization can be done on the basis of either time or
space. When a discretization of time is chosen, a grid can be constructed by isochrones which
depend on the ship speed. Another option is a fixed grid in space, with predefined points between
which the ship can sail. An advantage of the isochrone method is that the ship sails a course for a
fixed time and then changes course which is the way ships are operated in reality. For a fixed grid,
the time between course changes is different each leg. Another advantage of the isochrone method
over a fixed grid is that the differences between the courses that the algorithm can choose are
constant. When a rectangular fixed grid is used, the difference between the courses to the next
column of points is different for each set of two points. This causes a lower resolution for choosing
courses.
The large advantage of a fixed grid is that many calculations can be performed before actually
starting the algorithm. The weather information for example can be interpolated at each grid point at
all points in time in the GRIB file. The isochrone method is required to interpolate weather
information in space for each new location reached because the location is not known prior to the
start of the algorithm. Additionally, using a rectangular grid, the location can be indicated by indices.
This is faster than indicating the location by latitude and longitude and calculating these for each
point as required using the isochrone method. For these reasons, it is chosen to use a rectangular
grid for calculation speed and to simplify the algorithm.

6
Grid construction
The grid is constructed using the great circle between start and end. Points are distributed uniformly
across this great circle and great circles are drawn perpendicular to the initial great circle at each
point. By evenly distributing grid points on these great circles, a grid is constructed; see figure 4.
Figure 4: Fixed grid for routing around the great circle route
The ship can sail between points in the grid. The courses and distances between all allowed sets of
points are calculated prior to the actual routing algorithm using rhumb lines. If a great circle track
would be used instead, the course would change a little in one leg. This is not desirable in the
algorithm since it complicates finding the wind angle for example. Moreover, in operation a constant
course is more convenient than a great circle.
An optimal route can deviate considerably from the great circle route. This depends on the weather
conditions and on how much the ship speed depends on the weather. The size of the grid in the
direction perpendicular to the great circle determines whether it is possible for the ship to sail far
from the great circle. When the great circle distance between start and end points is larger, the
distance an optimal route may lie from the great circle can also become larger. For this reason, the
size of the grid in this direction is defined by a grid aspect ratio.
GRIB files
The information from the GRIB files used is:
- True wind direction and speed - Significant wave height of wind waves and swell combined - Mean wave period of the primary waves - Mean wave direction of the primary waves - Ocean current speed and direction
Tidal currents are neglected because of their periodic nature and also due to the fact that the
method is intended for offshore use where tidal currents have a small impact compared to effects of
wind and waves.
Number of calculations
To use a brute force calculation (i.e. calculate all possible routes with all possible engine settings)
yields an unacceptably high number of calculations. However, the current methods available for
routing cannot handle two control variables, therefore it is attempted to create a routing algorithm
similar to the brute force calculation but with a smaller number of calculations than m
NEnn for an
n by m grid and nNE engine settings. With a grid of 20*30 and 5 engine settings (quite coarse), this
would yield 1x1060 calculations.

7
The number of calculations is raised most by the exponential growth. The reason for the exponential
growth is that each point can be reached by many routes. Since each route can arrive at a point at a
different time, each route splits into NEnn new routes. If the number of routes to a point could
be limited to nR, the number of routes through the grid would be RNE nnn
, in the example above,
this would equal 3 x103 calculations. The question now, is how to reduce the number of routes to a
point that are used to continue along the grid. Evidently, when the time at which a route reaches a
point exceeds the maximum set time, it is excluded. The same goes for fuel consumption. More
importantly, by considering the choice between fuel consumption and duration that has to be made
in routing of motorsailers, the following method can also be applied.
If two routes arrive at the same point at the same time, but route A needs more fuel than route B,
route A can never be part of an optimal route. Also, when route A arrives at the point later and by
using more fuel than route B, route A can be excluded too. These considerations result in the notion
that routes to a point can be excluded when they are not part of a Pareto front. This is illustrated in
figure 5 where the green points constitute the Pareto front of all possible points, shown in blue. The
red circles show nR selected points at equally spaced intervals to continue with.
Figure 5: Illustration of the method to exclude routes using a Pareto front
In order to further decrease calculation time, the courses the algorithm can choose are restricted by
a course range. This method is sensible since it is very unlikely that a ship will make very large course
alternations on an optimal route.
Speed calculation
Wind polars give the ship speed for a number of true wind speeds and angles. The calm water
boatspeed is interpolated in the polars, based on the true wind data from the GRIB file. The same
method is applied to the wave polar which is interpolated for significant wave height, mean period
and mean angle.
Each leg is “sailed” with all chosen engine settings. When the ship speed in calm water is known, the
factor for the speed in waves is applied. First the wave angle is calculated from the wave direction
and the course in the same way as the wind angle. Then, the factor on the speed in waves is found by
finding the value corresponding to this wave angle. The current is incorporated in the true wind and
in the speed over ground.
0
2
4
6
8
10
12
35 40 45 50 55 60 65 70
Fue
l co
nsu
mp
tio
n [
ton
]
Time [h]
All routes Paretofront After route exclusion
8
Finally, the leg duration is calculated by using the ship speed found and the leg distance. Since the
fuel consumption rate is known for the used engine setting, the fuel consumption for the leg can be
calculated from the duration and fuel consumption rate.
5.2 Algorithm check
The outcome of the algorithm described here is compared to routes found by the commercial
program Maxsea Time Zero (T0). Since the grid system is different from the rectangular fixed grid
used here, it cannot be expected that the routes are identical but a similar trend should appear. The
wind polar for a typical sailing yacht included in T0 is taken. This means that one wind polar is used
so multiple engine settings are not included here. Waves and current are not included in this
comparison because T0 uses different wave and current data. The time step in T0 is set to 1 hour in
order to obtain a high resolution. The grid in the DD routing algorithm is set to 150 by 151 points
with an aspect ratio of 0.4. The course range is set to 180 degrees. The route exclusion method is set
to select only the fastest route which gives a minimum time routing method.
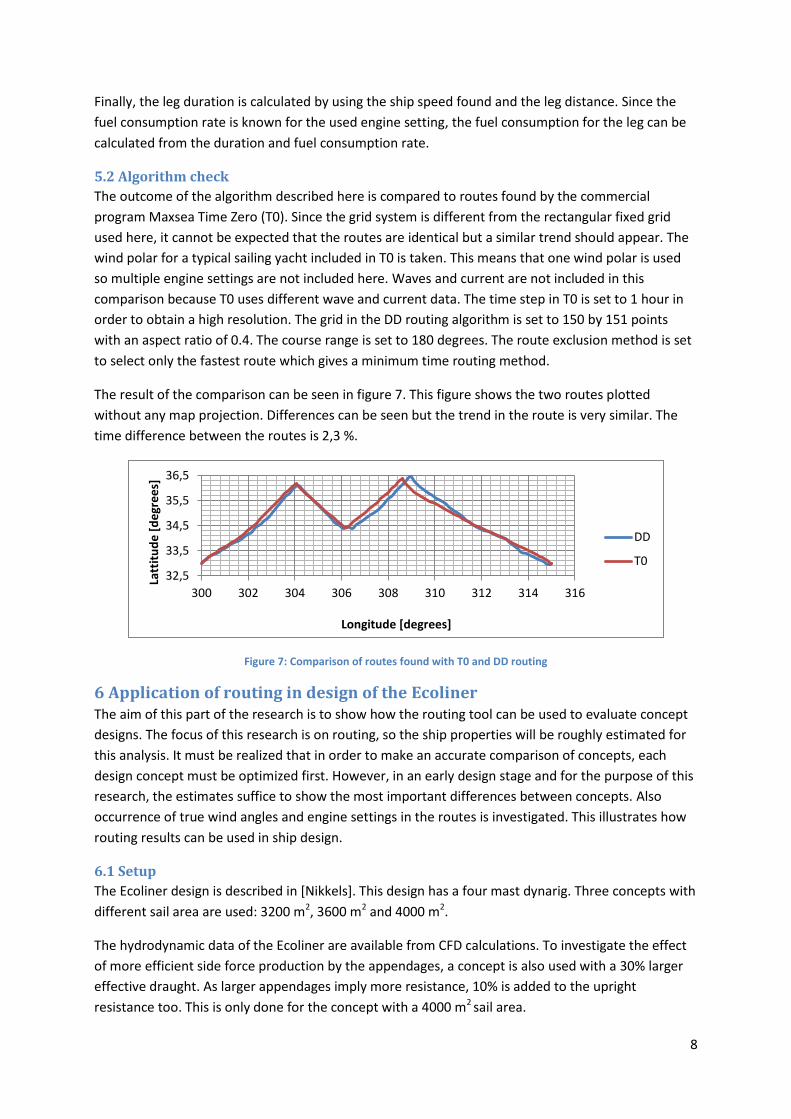
The result of the comparison can be seen in figure 7. This figure shows the two routes plotted
without any map projection. Differences can be seen but the trend in the route is very similar. The
time difference between the routes is 2,3 %.
Figure 7: Comparison of routes found with T0 and DD routing
6 Application of routing in design of the Ecoliner The aim of this part of the research is to show how the routing tool can be used to evaluate concept
designs. The focus of this research is on routing, so the ship properties will be roughly estimated for
this analysis. It must be realized that in order to make an accurate comparison of concepts, each
design concept must be optimized first. However, in an early design stage and for the purpose of this
research, the estimates suffice to show the most important differences between concepts. Also
occurrence of true wind angles and engine settings in the routes is investigated. This illustrates how
routing results can be used in ship design.
6.1 Setup
The Ecoliner design is described in [Nikkels]. This design has a four mast dynarig. Three concepts with
different sail area are used: 3200 m2, 3600 m2 and 4000 m2.
The hydrodynamic data of the Ecoliner are available from CFD calculations. To investigate the effect
of more efficient side force production by the appendages, a concept is also used with a 30% larger
effective draught. As larger appendages imply more resistance, 10% is added to the upright
resistance too. This is only done for the concept with a 4000 m2 sail area.
32,5
33,5
34,5
35,5
36,5
300 302 304 306 308 310 312 314 316
Latt
itu
de
[d
egr
ee
s]
Longitude [degrees]
DD
T0

9
The Dynarig is also compared with Flettner rotors. Flettner rotor data from tests by the Maritime
Department of Hochschule Emden-Leer are used. These tests are done for rotors with an aspect ratio
of 4.76 with end plates. Three of these rotors are used on this concept. The aspect ratio is equal to
the aspect ratio of the tests. The length is chosen in such a way that the heeling moment is similar to
the heeling moment of the dynarig. Different rotation rates are modeled by various sail sets.
In order to account for the weight of the rig, this is subtracted from the cargo capacity which
influences the deadweight. No other changes than those described are made to the concepts. It can
be argued that a more accurate comparison can be made when the concept designs are further
developed. However, the changes described give a good impression in an early design stage and
suffice to illustrate the application of the routing tool in the design.
The costs of operating a ship can be used to choose the ship speed. Also a comparison between
designs can be made using costs. How this is done will be described in the next paragraph. Here the
cost calculation is explained. Similar to the ship performance, the cost model is estimated for the
purpose of illustrating the method. A more thorough study in the operating cost is needed to make a
good comparison. The operating costs constitute of fuel costs per ton of fuel and cost per time unit.
Marine diesel oil (MDO) is used as fuel for the Ecoliner. The cost of MDO in Rotterdam on 23th July
2012 is 877 $/ton [Navigate]. The ship is assumed to sail 268 days a year. Bulk carriers spend 24 days
off hire on average [Stopford]. The days spent in port and in ballast are both assumed to be 10% of
the total. The assumed number of days in ballast is low because the ship is relatively small and is
intended for a liner service.
A GRIB file archive of 2006 and 2007 with a spatial resolution of 1 degree is available, courtesy to
Peter Naaijen. The East point is 45 oN 15 oW and the West point is 45 oN 45 oW. The grid has 30 points
along the great circle route and 51 points perpendicular to it and an aspect ratio of 0.6. For 1st
January 2006, the chosen grid size results in an average leg time of 3 hours and a maximum course
difference of 19,4 o. The course deviation from the great circle course is 64,9 o so a course range of
140 o is chosen. For each start date, 15 routes are calculated. This results in an average time interval
smaller than the required 3 hours which is the time interval between weather updates.
The maximum time a route can take is set to 360 hours which is the duration of each weather file.
The maximum allowable true wind speed is set to 50 knots and the maximum significant wave height
is 10 meters. In order to simulate the ship operation, routings are performed from East to West and
vice versa.
6.2 Analyzing the results
In total, 15 routes are found for each start date. In order to compare ship concepts, a choice must be
made between these points. Here, this is done in two ways. The first method is to set the average
speed along the great circle, speeds of 10 and 12 knots are used for this. The second method is to
choose the speed with the lowest cost according to the cost model presented in this paragraph. The
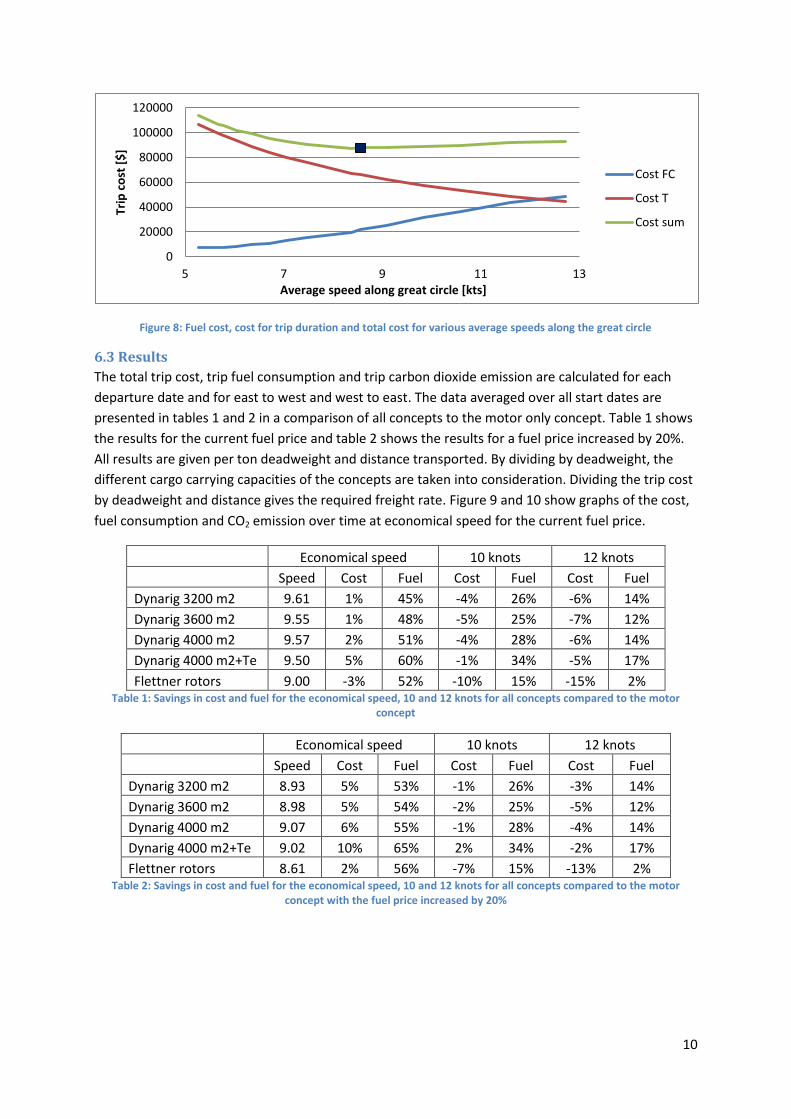
first method is illustrated in figure 8. This graph shows the cost of fuel, the cost due to trip duration
and the total cost. It can be seen that the speed for minimum cost is 8,4 knots for this date.
10
Figure 8: Fuel cost, cost for trip duration and total cost for various average speeds along the great circle
6.3 Results
The total trip cost, trip fuel consumption and trip carbon dioxide emission are calculated for each
departure date and for east to west and west to east. The data averaged over all start dates are
presented in tables 1 and 2 in a comparison of all concepts to the motor only concept. Table 1 shows
the results for the current fuel price and table 2 shows the results for a fuel price increased by 20%.
All results are given per ton deadweight and distance transported. By dividing by deadweight, the
different cargo carrying capacities of the concepts are taken into consideration. Dividing the trip cost
by deadweight and distance gives the required freight rate. Figure 9 and 10 show graphs of the cost,
fuel consumption and CO2 emission over time at economical speed for the current fuel price.
Economical speed 10 knots 12 knots
Speed Cost Fuel Cost Fuel Cost Fuel
Dynarig 3200 m2 9.61 1% 45% -4% 26% -6% 14%
Dynarig 3600 m2 9.55 1% 48% -5% 25% -7% 12%
Dynarig 4000 m2 9.57 2% 51% -4% 28% -6% 14%
Dynarig 4000 m2+Te 9.50 5% 60% -1% 34% -5% 17%
Flettner rotors 9.00 -3% 52% -10% 15% -15% 2% Table 1: Savings in cost and fuel for the economical speed, 10 and 12 knots for all concepts compared to the motor
concept
Economical speed 10 knots 12 knots
Speed Cost Fuel Cost Fuel Cost Fuel
Dynarig 3200 m2 8.93 5% 53% -1% 26% -3% 14%
Dynarig 3600 m2 8.98 5% 54% -2% 25% -5% 12%
Dynarig 4000 m2 9.07 6% 55% -1% 28% -4% 14%
Dynarig 4000 m2+Te 9.02 10% 65% 2% 34% -2% 17%
Flettner rotors 8.61 2% 56% -7% 15% -13% 2% Table 2: Savings in cost and fuel for the economical speed, 10 and 12 knots for all concepts compared to the motor
concept with the fuel price increased by 20%
0
20000
40000
60000
80000
100000
120000
5 7 9 11 13
Trip
co
st [
$]
Average speed along great circle [kts]
Cost FC
Cost T
Cost sum

11
Figure 9: Cost per ton deadweight and distance for all concepts at the economic speed
Figure 10: Fuel consumption and CO2 emission per ton deadweight and distance for all concepts at the economic speed
It can be seen that at the economic speed, the cost is lower when a rig is used. For fixed speeds of 10
and 12 knots, the costs are higher for the concepts with a rig except the 4000 m2 dynarig with
increased effective draught. The fuel consumption is lower for concepts with a rig in all cases.
In order to investigate the occurrence of various true wind angles, the occurrence of true wind angles
is plotted for the routes with the lowest cost. The result can be seen in figure 11.
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
14-12-2005 2-7-2006 18-1-2007 6-8-2007
Co
st p
er
DW
T*D
[$
/kg*
nm
]
Date
Cost East -West
3200 EW
3600 EW
4000 EW
4000+Te EW
Flettner EW
motor EW
0
5
10
15
20
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
14-12-2005 2-7-2006 18-1-2007 6-8-2007
CO
2 e
mis
sio
ns
[g/t
on
*nm
]
Fue
l pe
r D
WT*
D [
g/to
n*n
m]
Date
Fuel East -West
3200 EW
3600 EW
4000 EW
4000+Te EW
Flettner EW
motor EW

12
Figure 11: Occurrence of true wind angles in least cost routes for all concepts
For some departure dates, no data are available. This is caused by the fact that some routings failed
to find a route because the wave height or the wind speed was too high. When this is the case for the
departure of destination point, the ship speed is zero and no routes are found. Especially the engine
only concept suffers from this because it uses only engine propulsion where the other concepts use
sail propulsion as well. When no route is found, the start date is discarded and has no effect on the
final result.
9 Conclusions and recommendations It can be concluded that the research goal: application of weather routing to the design process of
motorsailers is reached. It is shown how the developed methods are used to evaluate concept
designs. The savings in cost and fuel by using various rigs are shown.
More research has to be done to further investigate the effects that sails have on the propeller
performance and the added resistance in waves. This will enable a more accurate calculation of the
ship performance which is important for routing. Examples are the effect of leeway on the propeller
efficiency and the effect of heel on the added resistance in waves. Another valuable addition is a
comparison of VPP results to performance of the full size ship.
The reliability of the routing algorithm is tested by comparing output parameters to the update
period of the GRIB file. It must be noted that this comparison only answers whether the result is
reliable within the accuracy of the weather data and the interpolation. The comparison of routing
results to T0 shows good agreement for a ship with a fixed engine setting.
The result of this kind of comparison can be used when making design choices for motorsailers. For
the comparison made here, the concepts with a rig have a lower fuel consumption, especially when
sailing at economic speed. The costs for operating the ship are also lower at economic speed but
higher at average speeds of 10 and 12 knots. This information is summarized in table 1. The analysis
will be more reliable when the weather data archive spans a larger amount of time.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
0 30 60 90 120 150 180
Occ
ure
nce
[%
]
TWA
3200
3600
4000
4000+Te
Flettner
motor

13
References [Dijkstra] G. Dijkstra, M. Leslie Miller, Dynamic routing for motor sailing ships and – yachts, Dykstra
Naval Architects, 2011
[DNA] http://www.gdnp.nl
[Enercon E-ship] http://www.marinebuzz.com/2008/08/08/e-ship-1-with-sailing-rotors-to-reduce-
fuel-costs-and-to-reduce-emissions/
[Fairtransport] http://fairtransport.homestead.com/
[Maxsea] http://www.maxsea.com
[Motte] R. Motte, R.S. Burns, S. Calvert, An overview of current methods used in weather routing,
Journal of Navigation (1988), 41 : pp 101-113
[Navigate] http://navigatemag.ru/bunker/
[Nikkels] T. Nikkels, T. van Es, E. Mobron, The Ecoliner concept, Dykstra Naval Architects, 2012
[Rainbow Warrior III] http://www.greenpeace.org/international/en/about/ships/the-rainbow-
warrior/
[Sparreboom] D. Sparreboom, Weather routing of motorsailers, TU Delft, August 2012
[Windesign] Windesign user’s guide version 4.0, Yacht Research International, Inc., 2003