wilfredo aliaga juarez
TRANSCRIPT
LABORATORIOS DECIRCUITOS ELECTRONICOS
GUIA TEORICA
(2ª versión)
MARIA ISABEL GIMENEZ DE GUZMAN UNIVERSIDAD SIMON BOLIVAR
DPTO. ELECTRONICA Y CIRCUITOS
1996
INDICE
INTRODUCCION 1
CAPITULO I.- TIPOS Y METODOS DE MEDICION 41.1 TIPOS DE MEDICION. 4
1.1.1.- Mediciones directas 41.1.2.- Mediciones indirectas 4
1.2 METODOS DE MEDICION 41.2.1.- Método de deflexión 41.2.2.- Método de detección de cero 61.2.3.- Método de comparación. 81.2.4.- Método de sustitución. 91.2.5.- Método diferencial. 111.2.6.- Métodos generales. 12
CAPITULO II.-CARACTERISTICAS DE LOS INSTRUMENTOS DEMEDICION 13
2.1. EXACTITUD Y PRECISION. 132.2. ERROR. 152.3. CORRECCION. 152.4. RESOLUCION. 162.5. SENSIBILIDAD. 172.6 GAMA Y ESCALA. 182.7 BANDA DE FRECUENCIAS. 192.8. LINEALIDAD. 222.9 EFICIENCIA 232.10. RESPUESTA ESTATICA Y DINAMICA. 23
2.10.1.- Error dinámico 242.10.2.- Tiempo de respuesta 252.10.3.- Tiempo nulo. 252.10.4.- Sobrealcance. 26
CAPITULO III.- ERRORES 273.1 ERRORES GRANDES. 28
3.2 ERRORES SISTEMATICOS. 283.2.1 - Del instrumento. 283.2.2 - Del método utilizado. 293.2.3 - Ambientales. 293.2.4 - De observación. 30
CAPITULO IV.- COMPONENTES 314.1 INTRODUCCION. 314.2 CLASIFICACION GENERAL DE LOS PARAMETROSELECTRICOS 32
4.2.1.- Parámetros Concentrados o Distribuidos. 324.2.2.- Parámetros Activos o Pasivos. 354.2.3.- Parámetros Variables o Invariables con eltiempo. 364.2.4.- Parámetros Lineales o No Lineales. 37
4.3 COMPONENTES CIRCUITALES MAS USUALES 384.4 RESISTENCIAS. 39
4.4.1.- Definición. 394.4.2.- Especificaciones 39
4.4.2.1.- Valor nominal. 394.4.2.2.- Tolerancia. 424.4.2.3.- Capacidad de disipación depotencia. 424.4.2.4.- Temperatura de operación. 434.4.2.5.- Coeficiente de Tensión. 444.4.2.6.- Coeficiente de Temperatura. 444.4.2.7.- Estabilidad. 454.4.2.8.- Frecuencia de operación. 454.4.2.9.- Vida de almacenamiento. 474.4.2.10.- Característica de humedad. 47
4.4.3.- Clasificación. 474.4.3.1.- Resistencias de Carbón. 474.4.3.2.- Resistencias de Capa Delgada. 484.4.3.3.- Resistencias de Alambre. 484.4.3.3.- Resistencias de Capa gruesa. 49
4.5 CONDENSADORES. 494.5.1.- Definición. 494.5.2.- Especificaciones. 50
4.5.2.1.- Valor nominal. 504.5.2.2.- Tolerancia. 514.5.2.3.- Voltaje máximo entre losterminales. 514.5.2.4.- Resistencia asociada. 52
4.5.3.- Clasificación. 524.5.3.1.- Condensador con dieléctricode aire. 524.5.3.2.- Condensadores de mica. 534.5.3.3.- Condensadores de papel. 544.5.3.4.- Condensadores de plástico. 544.5.3.5.- Condensadores de cerámica. 544.5.3.6.- Condensadores electrolíticos. 55
4.6 BOBINAS O INDUCTORES. 564.6.1.- Definición. 564.6.2.- Especificaciones. 58
4.6.2.1.- Valor nominal y tolerancia. 584.6.2.2.- Resistencia interna. 584.6.2.3.- Corriente máxima. 594.6.2.4.- Frecuencia de operación. 59
CAPITULO V EL GALVANOMETRO DE D'ARSONVAL 605.1 INTRODUCCION. 605.2 FUNCIONAMIENTO. 61
CAPITULO VI AMPERIMETRO, VOLTIMETRO, OHMETRO yMULTIMETRO 70
6.1 INTRODUCCION. 706.2 AMPERIMETRO.DC 70
6.2.1.- Diseño. 706.2.2.- Forma de conexión. 726.2.3.- Amperímetro de varias escalas. 746.2.4.- Características de un amperímetro. 76
6.3 VOLTIMETRO DC. 766.3.1.- Diseño. 766.3.2.- Conexión del voltímetro. 786.3.3.- Voltímetro de varias escalas. 796.3.4.- Características de un Voltímetro. 80
6.4 OHMETRO. 826.4.1.- Diseño básico. 826.4.2.- Diseño de un óhmetro con selección de laresistencia a media escala. 84
6.4.2.1.- Diseño de un óhmetro con unvalor a media escala específico utilizando la primera configuración. 866.4.2.2.- Diseño de un óhmetro devalor a media escala específicoutilizando la segunda configuración. 89
6.4.3.- Potenciómetro de ajuste de un óhmetro. 916.4.4.- Diseño de un óhmetro de varias escalas. 92
6.5 MULTIMETRO. 936.6 INSTRUMENTOS AC. 95
CAPITULO VII MEDICIONES ESPECIALES 967.1 MEDICION DE RESISTENCIAS POR METODOSINDIRECTOS. 96
7.1.1.- Primer procedimiento. 977.1.2.- Segundo procedimiento. 99
7.2 METODOS PARA DETERMINAR LA RESISTENCIAINTERNA DE UN GALVANOMETRO. 100
7.2.1.- Primer método 1007.2.2.- Segundo método 1017.2.3.- Tercer método 103
CAPITULO VIII EL OSCILOSCOPIO 1078.1 INTRODUCCION. 1078.2 PARTES FUNDAMENTALES DE UN OSCILOSCOPIO. 1078.3 EL TUBO DE RAYOS CATODICOS. 109
8.3.1.- Estructura. 109
8.3.1.1.- El cañón electrónico. 1108.3.1.2.- Las placas de deflexión. 1128.3.1.3.- La pantalla. 1148.3.1.4.- Los contactos. 114
8.3.2.- Obtención de Figuras en el TRC. 1148.4 EL AMPLIFICADOR VERTICAL. 125
8.4.1.- Calibración. 1258.4.2.- Respuesta en frecuencia. 1278.4.3.- Impedancia de entrada. 1288.4.4.- Acoplamiento de la señal de entrada. 131
8.5 LA BASE DE TIEMPO. 1358.6 EL CIRCUITO DE DISPARO. 1378.7 EL AMPLIFICADOR HORIZONTAL. 1428.8 EL AMPLIFICADOR DE CONTROL DE INTENSIDAD. 1438.9 LA LINEA DE RETARDO. 1458.10 LAS FUENTES DE ALIMENTACION. 1478.11 LAS PUNTAS DE PRUEBA DEL OSCILOSCOPIO. 1478.12 CLASIFICACION DE LOS OSCILOSCOPIOS. 152
8.12.1.- En base a su ancho de banda. 1528.12.2.- En base al tipo de TRC utilizado. 1538.12.3.- En base a la cantidad de señalesa visualizar en forma simultánea. 153
8.13 SISTEMAS PARA PRESENTAR DOS O MASSEÑALES SIMULTANEAS SOBRE LA PANTALLA DE UNOSCILOSCOPIO CON UN CAÑON. 153
8.13.1.- Modo alternado. 1548.13.2.- Modo cortado. 1558.13.3.- Sincronización del circuito de disparoen un osciloscopio de dos canales. 155
8.14 MEDICIONES CON EL OSCILOSCOPIO. 1568.14.1.- Medición de Voltajes. 1568.14.2.- Medición de Corrientes. 1598.14.3.- Medición de Frecuencias. 159
8.14.3.1.- Método indirecto utilizando lacalibración de tiempo del eje horizontal. 159
8.14.3.2.- Método indirecto utilizando lasFiguras de Lissajous. 1608.14.3.3.- Método indirecto utilizandoel eje "Z". 163
8.14.4.- Medición de Desfasaje. 1648.14.4.1.- Utilizando el barrido horizontaldel osciloscopio. 1648.14.4.2.- Utilizando la figura deLissajous básica. 1668.14.4.3.- Utilizando disparo externo de ladiente de sierra. 168
CAPITULO IX PUENTE DE WHEATSTONE 1719.1 INTRODUCCION. 1719.2 PRINCIPIO DE FUNCIONAMIENTO. 1729.3 FACTORES DE LOS QUE DEPENDE LA EXACTITUD DELPUENTE. 1749.4 SENSIBILIDAD DEL PUENTE DE WHEATSTONE. 1759.5 DISEÑO DE UN PUENTE DE WHEATSTONE. 175
CAPITULO X EL POTENCIOMETRO 17810.1 INTRODUCCION. 17810.2 PRINCIPIO DE FUNCIONAMIENTO. 17810.3 ERRORES DE MEDICION. 18410.4 CALCULO DE LA SENSIBILIDAD DELPOTENCIOMETRO 18510.5 MEDICION DE CORRIENTES Y RESISTENCIAS CON UN POTENCIOMETRO. 185
CAPITULO XI EL VATIMETRO 18711.1 INTRODUCCION. 18711.2 PRINCIPIO DE FUNCIONAMIENTO. 18711.3 MEDICION DE POTENCIA CON EL VATIMETRO. 191
11.3.1.- Medición de potencia de señalescontinuas (DC). 19111.3.2.- Medición de potencia de señalessinusoidales. 192
11.3.3.- Consideraciones sobre las resistenciasde los arrollados. 193
11.4 FORMAS DE CONEXION DEL VATIMETRO 19311.4.1.- Primera forma de conexión delvatímetro. 19411.4.2.- Segunda forma de conexión delvatímetro. 19411.4.3.- Bobina de compensación del vatímetro. 19611.4.4.- Conexión incorrecta del vatímetro. 198
CAPITULO XII PUENTES DE CORRIENTE ALTERNA 19912.1 INTRODUCCION. 19912.2 PRINCIPIO DE FUNCIONAMIENTO. 19912.3 COMPONENTES A MEDIR CON EL PUENTE DECORRIENTE ALTERNA. 20012.4 PUENTE DE MAXWELL. 20212.5 PUENTE DE HAY. 20512.6 MEDICION DE INDUCTANCIAS APLICANDOEL MODELO PARALELO. 20812.7 MEDICION DE CAPACITANCIAS APLICANDO EL MODELO SERIE. 20912.8 DISEÑO DE UN PUENTE AC. 21012.9 SENSIBILIDAD DEL PUENTE AC. 211
CAPITULO XIII RECTIFICADORES CON FILTROS 21213.1 INTRODUCCION 21213.2 PARAMETROS CARACTERISTICOS DE LASFUENTES DE VOLTAJE 213
13.2.1 Voltaje de Rizado. 21313.2.2 Factor de Rizado 21413.2.3 Regulación de Carga 21413.2.4 Regulación de Línea 214
13.3 EL TRANSFORMADOR 21513.4 EL RECTIFICADOR CON FILTRO 216
13.4.1 Etapa de conducción de los diodos 21713.4.2 Etapa de no conducción de los diodos 224
4
CAPITULO I
TIPOS Y METODOS DE MEDICION
1.1 TIPOS DE MEDICION.
Hay dos tipos de medición, mediciones directas e indirectas. Vamos aver en qué consiste cada uno de estos tipos.
1.1.1.- Mediciones directas
Las mediciones directas son aquéllas en las cuales el resultado esobtenido directamente del instrumento que se está utilizando. Por ejemplo,para medir la corriente que circula por un circuito podemos utilizar unamperímetro apropiado.
1.1.2.- Mediciones indirectas
Las mediciones indirectas son aquéllas en que el resultado deseado no loobtenemos directamente de las lecturas realizadas con los instrumentosutilizados, sino que es necesario emplear los datos obtenidos para hallar lacantidad deseada mediante algunos cálculos. Por ejemplo, el valor de unaresistencia lo podemos determinar de la siguiente forma: Con un amperímetromedimos la corriente que circula por ella, y con un voltímetro la caída devoltaje entre sus terminales cuando circula la corriente medidaanteriormente. Con estas dos lecturas podemos calcular la resistenciaaplicando la ley de Ohm.
1.2 METODOS DE MEDICION
Tanto las medidas directas como las indirectas podemos realizarlasutilizando dos métodos generales: El método de deflexión y el método dedetección de cero. Veamos en qué consiste cada uno de ellos.
1.2.1.- Método de deflexión
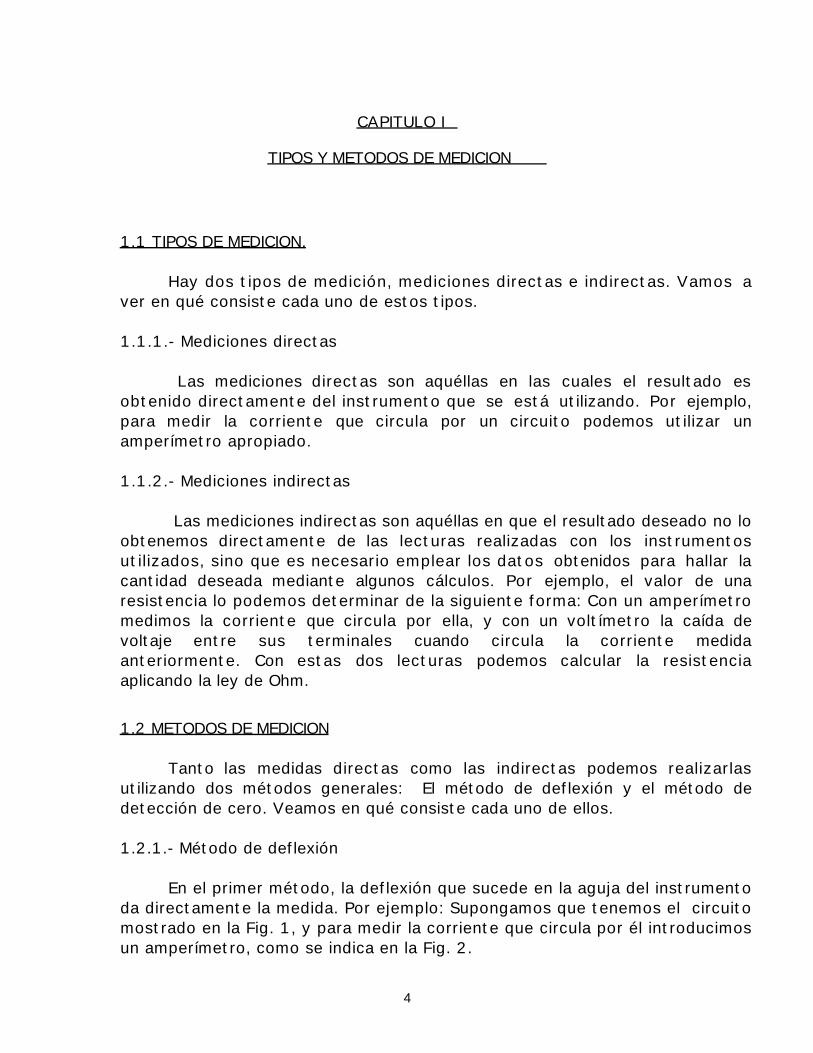
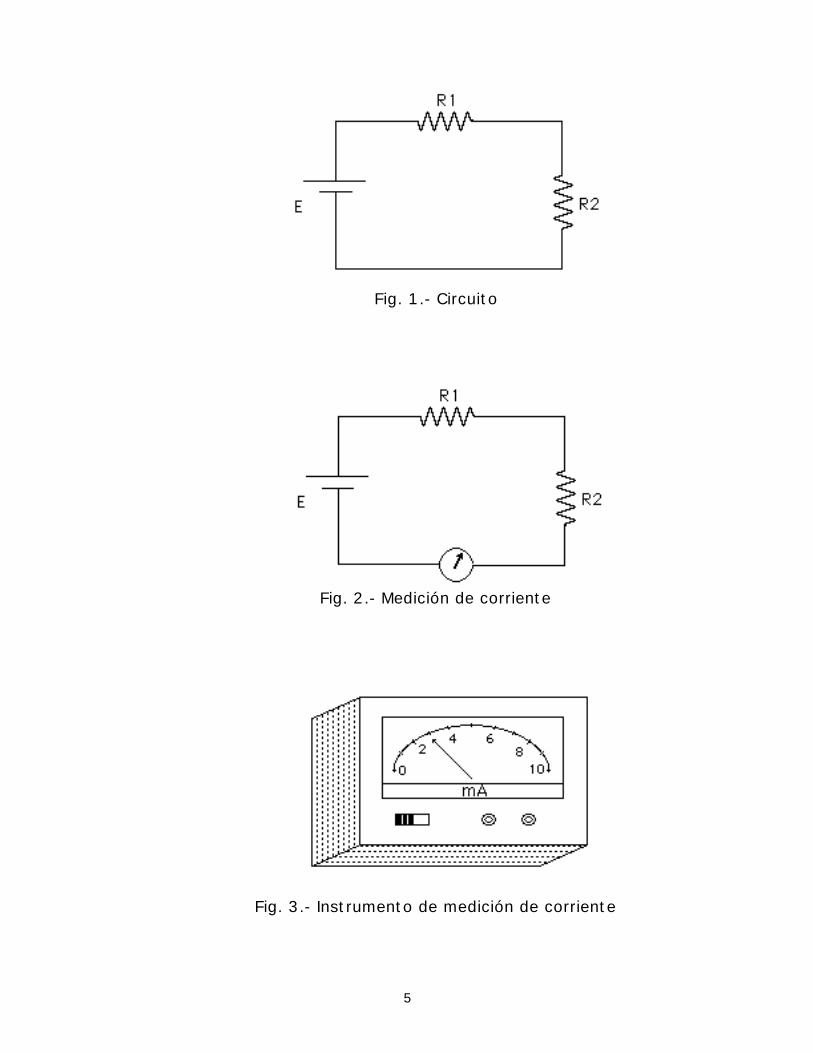
En el primer método, la deflexión que sucede en la aguja del instrumentoda directamente la medida. Por ejemplo: Supongamos que tenemos el circuitomostrado en la Fig. 1, y para medir la corriente que circula por él introducimosun amperímetro, como se indica en la Fig. 2.
5
Fig. 1.- Circuito
Fig. 2.- Medición de corriente
Fig. 3.- Instrumento de medición de corriente
6
La lectura del instrumento es la mostrada en la Fig. 3. El instrumento hadeflectado tres divisiones de las diez que tiene, y como sabemos que cada unade ellas corresponde a 1 mA, podemos concluir que la corriente que circulapor el circuito es de 3 mA.
1.2.2.- Método de detección de cero
En el método de cero, la indicación nula o cero del instrumento sensorlleva a determinar la incógnita que se busca a partir de otras condicionesconocidas. Esto lo podemos ver más claro con un ejemplo:
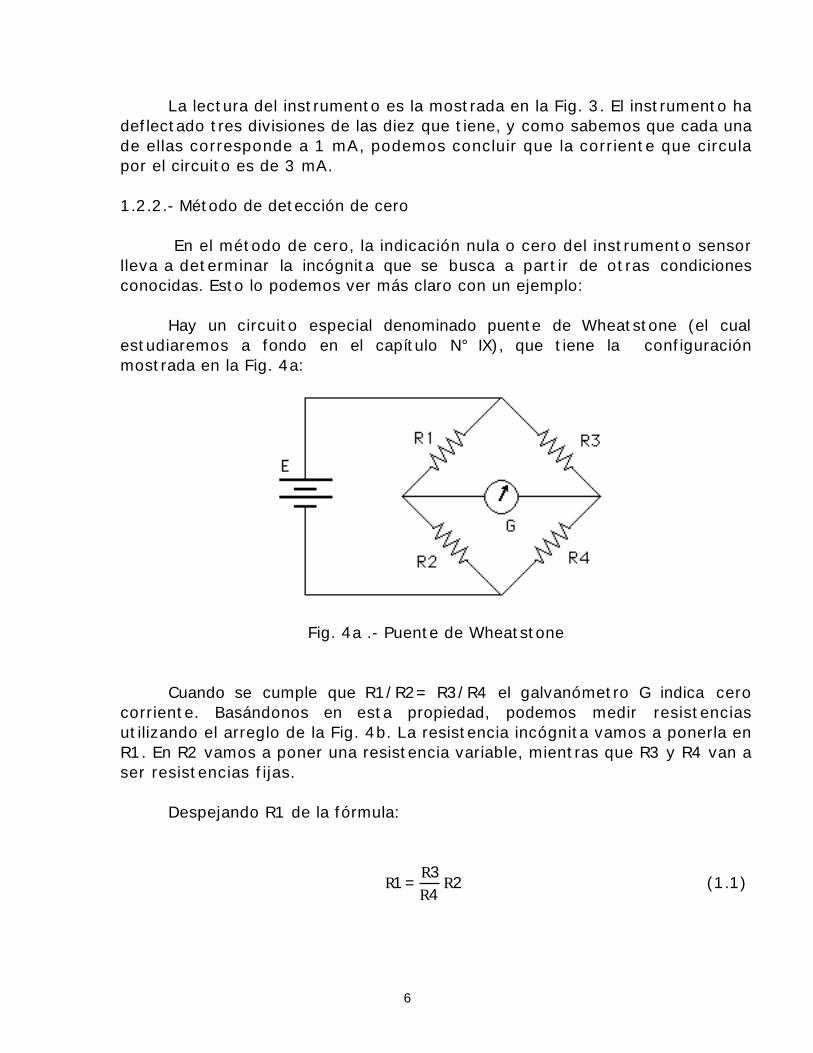
Hay un circuito especial denominado puente de Wheatstone (el cualestudiaremos a fondo en el capítulo N° IX), que tiene la configuraciónmostrada en la Fig. 4a:
Fig. 4a .- Puente de Wheatstone
Cuando se cumple que R1/R2= R3/R4 el galvanómetro G indica cerocorriente. Basándonos en esta propiedad, podemos medir resistenciasutilizando el arreglo de la Fig. 4b. La resistencia incógnita vamos a ponerla enR1. En R2 vamos a poner una resistencia variable, mientras que R3 y R4 van aser resistencias fijas.
Despejando R1 de la fórmula:
R1=
R3R4
R2 (1.1)
7
Como R3 y R4 son constantes
R1 = K R2 (1.2)
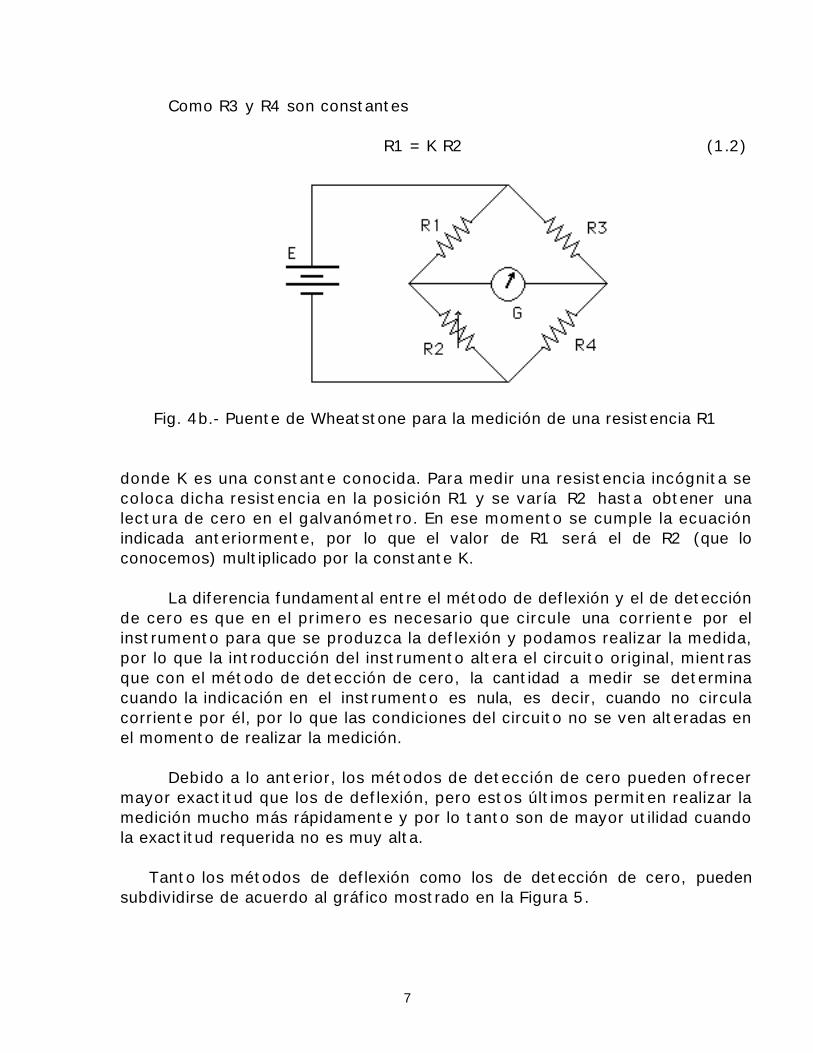
Fig. 4b.- Puente de Wheatstone para la medición de una resistencia R1
donde K es una constante conocida. Para medir una resistencia incógnita secoloca dicha resistencia en la posición R1 y se varía R2 hasta obtener unalectura de cero en el galvanómetro. En ese momento se cumple la ecuaciónindicada anteriormente, por lo que el valor de R1 será el de R2 (que loconocemos) multiplicado por la constante K.
La diferencia fundamental entre el método de deflexión y el de detecciónde cero es que en el primero es necesario que circule una corriente por elinstrumento para que se produzca la deflexión y podamos realizar la medida,por lo que la introducción del instrumento altera el circuito original, mientrasque con el método de detección de cero, la cantidad a medir se determinacuando la indicación en el instrumento es nula, es decir, cuando no circulacorriente por él, por lo que las condiciones del circuito no se ven alteradas enel momento de realizar la medición.
Debido a lo anterior, los métodos de detección de cero pueden ofrecermayor exactitud que los de deflexión, pero estos últimos permiten realizar lamedición mucho más rápidamente y por lo tanto son de mayor utilidad cuandola exactitud requerida no es muy alta.
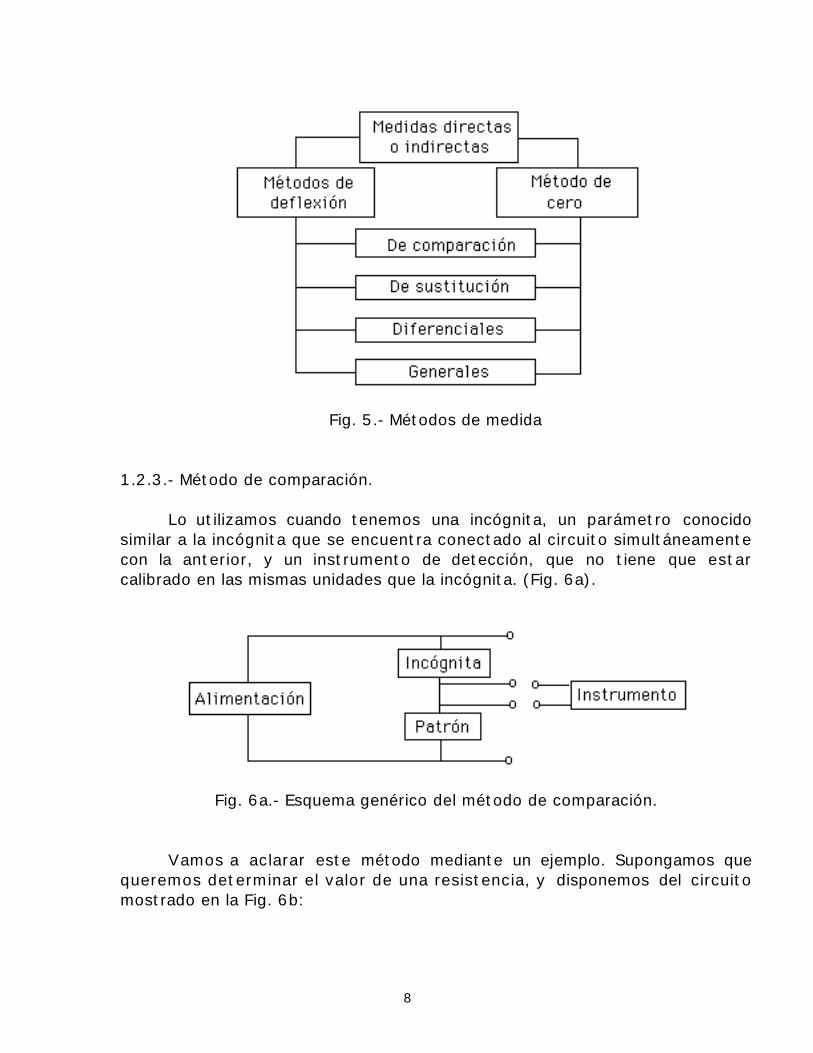
Tanto los métodos de deflexión como los de detección de cero, puedensubdividirse de acuerdo al gráfico mostrado en la Figura 5.
8
Fig. 5.- Métodos de medida
1.2.3.- Método de comparación.
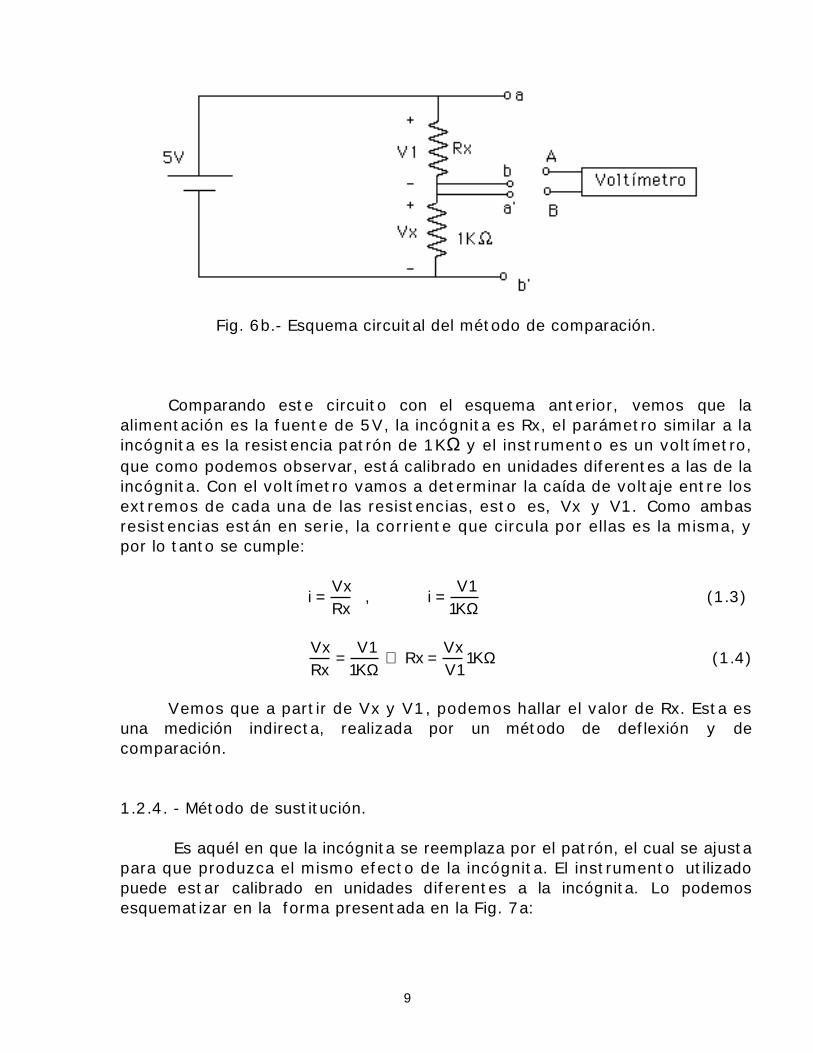
Lo utilizamos cuando tenemos una incógnita, un parámetro conocidosimilar a la incógnita que se encuentra conectado al circuito simultáneamentecon la anterior, y un instrumento de detección, que no tiene que estarcalibrado en las mismas unidades que la incógnita. (Fig. 6a).
Fig. 6a.- Esquema genérico del método de comparación.
Vamos a aclarar este método mediante un ejemplo. Supongamos quequeremos determinar el valor de una resistencia, y disponemos del circuitomostrado en la Fig. 6b:
9
Fig. 6b.- Esquema circuital del método de comparación.
Comparando este circuito con el esquema anterior, vemos que laalimentación es la fuente de 5V, la incógnita es Rx, el parámetro similar a laincógnita es la resistencia patrón de 1KΩ y el instrumento es un voltímetro,que como podemos observar, está calibrado en unidades diferentes a las de laincógnita. Con el voltímetro vamos a determinar la caída de voltaje entre losextremos de cada una de las resistencias, esto es, Vx y V1. Como ambasresistencias están en serie, la corriente que circula por ellas es la misma, ypor lo tanto se cumple:
i =
VxRx
, i =
V11KΩ
(1.3)
VxRx
=V1
1KΩ⇒ Rx =
VxV1
1KΩ (1.4)
Vemos que a partir de Vx y V1, podemos hallar el valor de Rx. Esta esuna medición indirecta, realizada por un método de deflexión y decomparación.
1.2.4. - Método de sustitución.
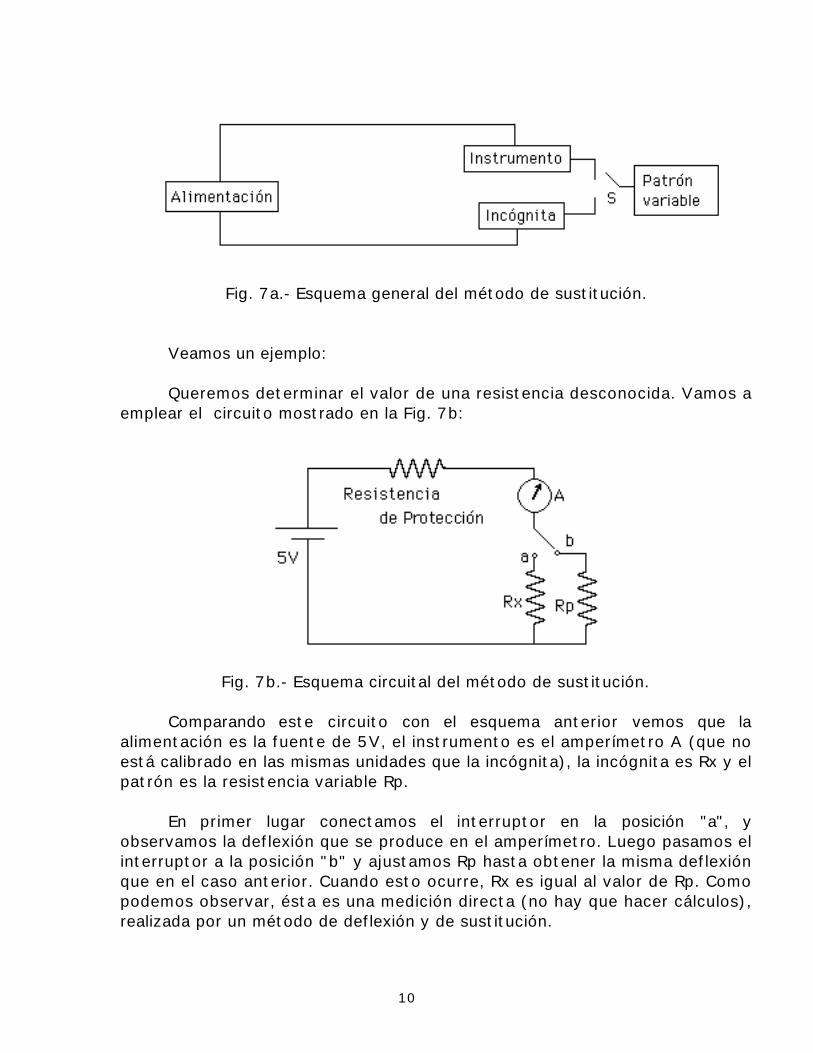
Es aquél en que la incógnita se reemplaza por el patrón, el cual se ajustapara que produzca el mismo efecto de la incógnita. El instrumento utilizadopuede estar calibrado en unidades diferentes a la incógnita. Lo podemosesquematizar en la forma presentada en la Fig. 7a:
10
Fig. 7a.- Esquema general del método de sustitución.
Veamos un ejemplo:
Queremos determinar el valor de una resistencia desconocida. Vamos aemplear el circuito mostrado en la Fig. 7b:
Fig. 7b.- Esquema circuital del método de sustitución.
Comparando este circuito con el esquema anterior vemos que laalimentación es la fuente de 5V, el instrumento es el amperímetro A (que noestá calibrado en las mismas unidades que la incógnita), la incógnita es Rx y elpatrón es la resistencia variable Rp.
En primer lugar conectamos el interruptor en la posición "a", yobservamos la deflexión que se produce en el amperímetro. Luego pasamos elinterruptor a la posición "b" y ajustamos Rp hasta obtener la misma deflexiónque en el caso anterior. Cuando esto ocurre, Rx es igual al valor de Rp. Comopodemos observar, ésta es una medición directa (no hay que hacer cálculos),realizada por un método de deflexión y de sustitución.
11
1.2.5.- Método diferencial.
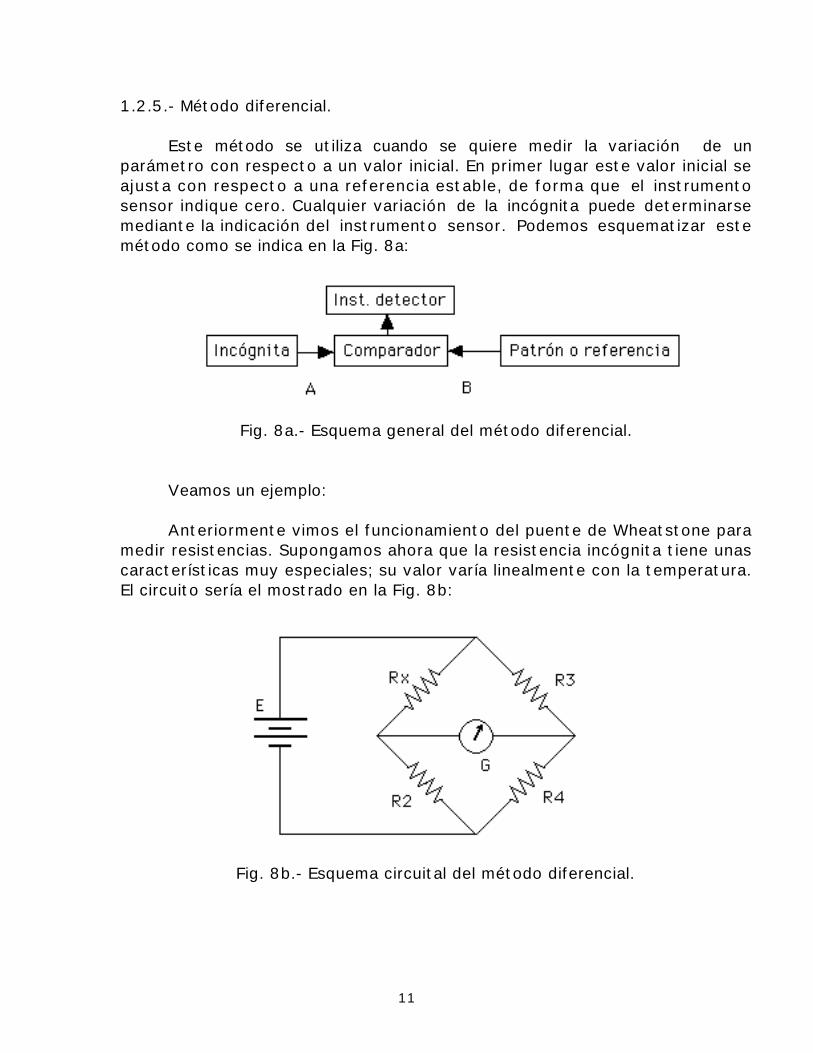
Este método se utiliza cuando se quiere medir la variación de unparámetro con respecto a un valor inicial. En primer lugar este valor inicial seajusta con respecto a una referencia estable, de forma que el instrumentosensor indique cero. Cualquier variación de la incógnita puede determinarsemediante la indicación del instrumento sensor. Podemos esquematizar estemétodo como se indica en la Fig. 8a:
Fig. 8a.- Esquema general del método diferencial.
Veamos un ejemplo:
Anteriormente vimos el funcionamiento del puente de Wheatstone paramedir resistencias. Supongamos ahora que la resistencia incógnita tiene unascaracterísticas muy especiales; su valor varía linealmente con la temperatura.El circuito sería el mostrado en la Fig. 8b:
Fig. 8b.- Esquema circuital del método diferencial.
12
Rx es la resistencia incógnita variable con la temperatura, R2 es laresistencia patrón y el galvanómetro G es el instrumento sensor. En primerlugar, para una cierta temperatura del local donde estamos trabajando,ajustamos R2 hasta conseguir una lectura de cero en el galvanómetro. Siposteriormente la temperatura aumenta, variará el valor de Rx, por lo que elpuente se desbalanceará y la aguja del galvanómetro sufrirá una deflexión queestá relacionada con la variación de temperatura que haya ocurrido. Ladenominación diferencial se debe precisamente a que con este método semiden variaciones, y no cantidades absolutas.
1.2.6.- Métodos generales.
Son aquéllos que no pueden incluirse en cualquiera de los otros grupos.Entre los métodos directos generales de deflexión se encuentran la mediciónde corriente mediante un amperímetro, la de voltaje con un voltímetro, la defrecuencia con un frecuencímetro, etc. Entre los indirectos generales dedeflexión están el del voltímetro y amperímetro para medir resistencias ypotencia, el del voltímetro y una resistencia patrón para medir corrientes,etc.
13
CAPITULO II
CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
Como hemos dicho anteriormente, los instrumentos de mediciónhacen posible la observación de los fenómenos eléctricos y sucuantificación. Ahora bien, estos instrumentos no son sistemas idealessino reales, y por lo tanto tienen una serie de limitaciones que debemostomar en cuenta para poder juzgar si afectan de alguna manera lasmedidas que estamos realizando, y poder determinar así mismo laveracidad de las anteriores.
Las características que definen el comportamiento de losinstrumentos son las siguientes:
-Exactitud y precisión-Error-Corrección-Resolución-Sensibilidad-Gama y escala-Banda de frecuencia-Linealidad-Eficiencia-Respuesta estática y dinámica-Error dinámico-Tiempo de respuesta-Tiempo nulo-Sobre alcance
2.1. EXACTITUD Y PRECISION.
En primer lugar vamos a analizar la diferencia entre los términosprecisión y exactitud . En general estas dos palabras son sinónimos,pero en el campo de las mediciones indican dos conceptoscompletamente diferentes.
Se dice que el valor de un parámetro es muy preciso cuando estámuy bien definido.
14
Por otra parte, se dice que dicho valor es muy exacto cuando seaproxima mucho al verdadero valor.
Veamos este ejemplo:
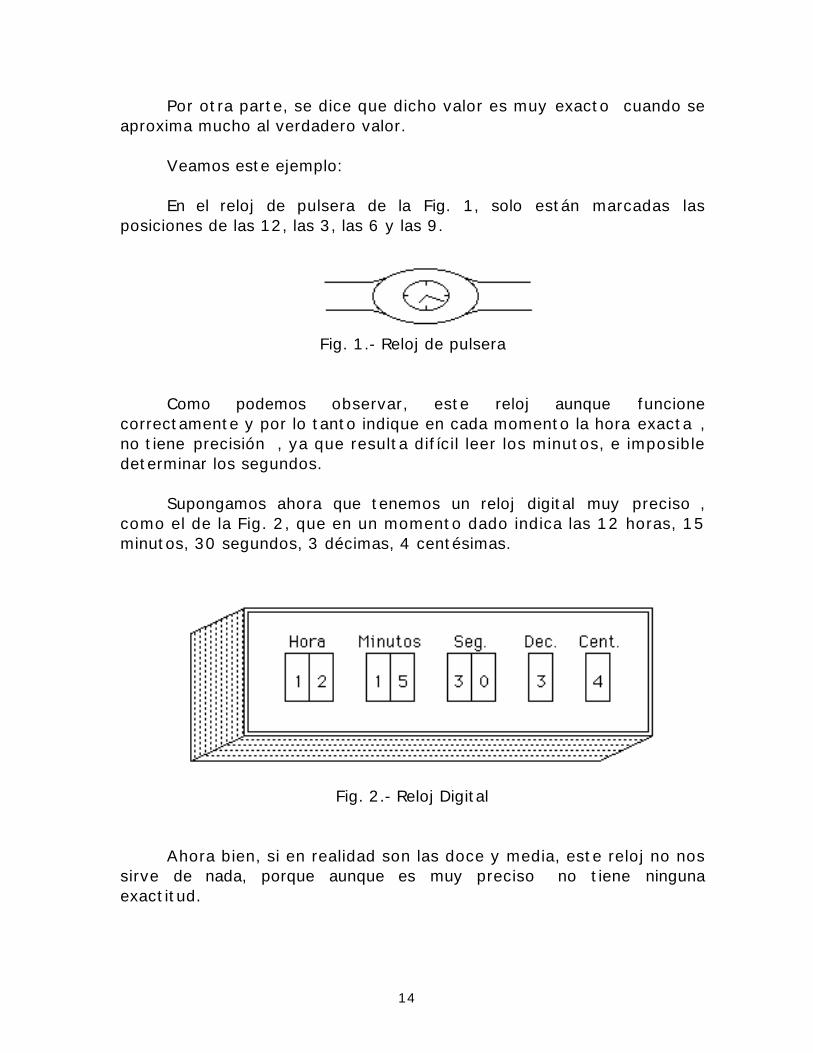
En el reloj de pulsera de la Fig. 1, solo están marcadas lasposiciones de las 12, las 3, las 6 y las 9.
Fig. 1.- Reloj de pulsera
Como podemos observar, este reloj aunque funcionecorrectamente y por lo tanto indique en cada momento la hora exacta ,no tiene precisión , ya que resulta difícil leer los minutos, e imposibledeterminar los segundos.
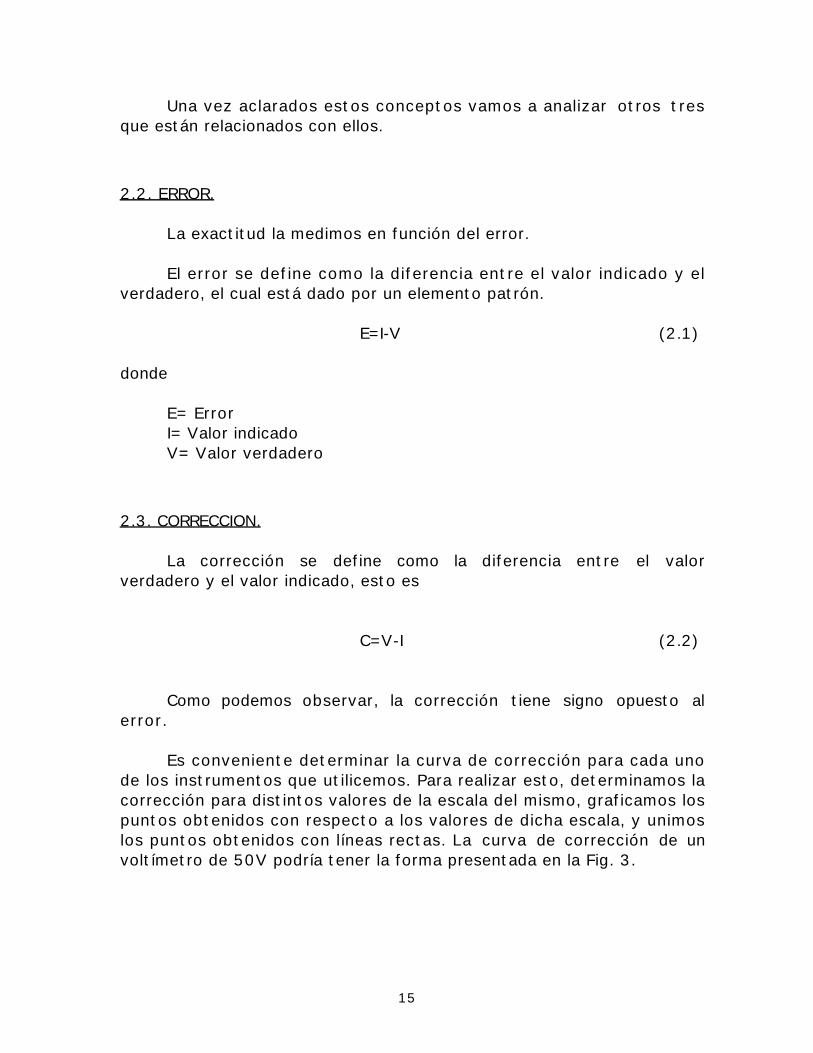
Supongamos ahora que tenemos un reloj digital muy preciso ,como el de la Fig. 2, que en un momento dado indica las 12 horas, 15minutos, 30 segundos, 3 décimas, 4 centésimas.
Fig. 2.- Reloj Digital
Ahora bien, si en realidad son las doce y media, este reloj no nossirve de nada, porque aunque es muy preciso no tiene ningunaexactitud.
15
Una vez aclarados estos conceptos vamos a analizar otros tresque están relacionados con ellos.
2.2. ERROR.
La exactitud la medimos en función del error.
El error se define como la diferencia entre el valor indicado y elverdadero, el cual está dado por un elemento patrón.
E=I-V (2.1)
donde
E= ErrorI= Valor indicadoV= Valor verdadero
2.3. CORRECCION.
La corrección se define como la diferencia entre el valorverdadero y el valor indicado, esto es
C=V-I (2.2)
Como podemos observar, la corrección tiene signo opuesto alerror.
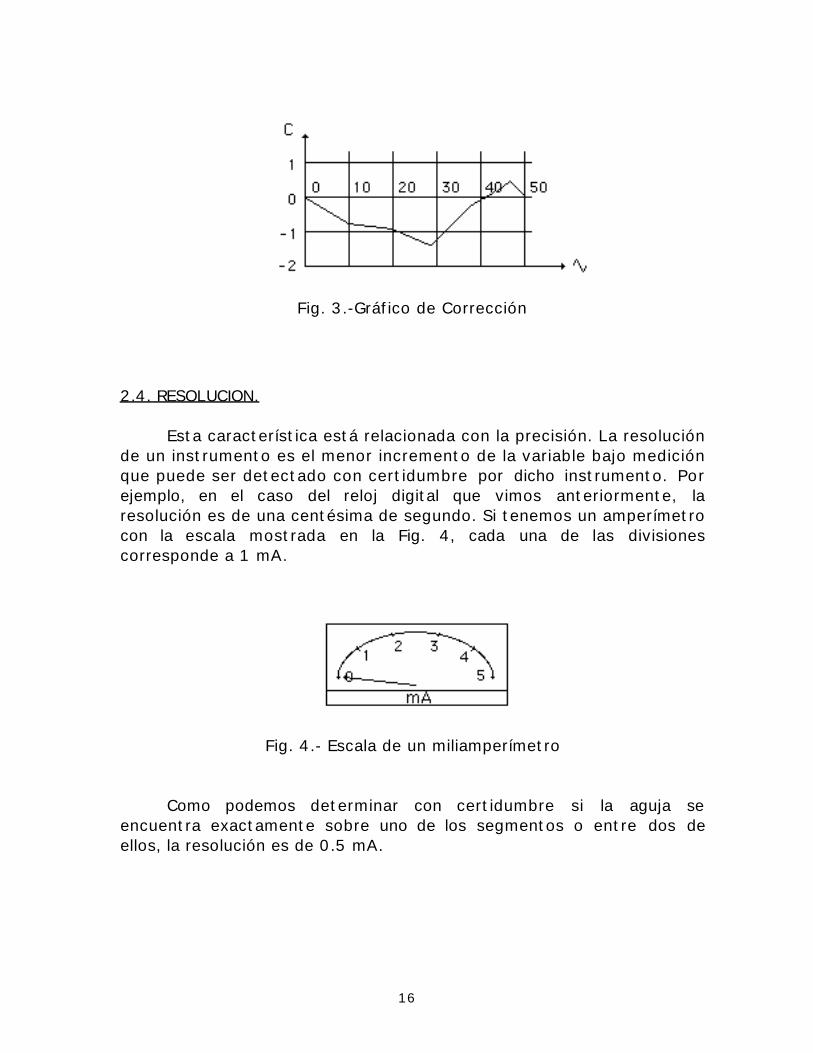
Es conveniente determinar la curva de corrección para cada unode los instrumentos que utilicemos. Para realizar esto, determinamos lacorrección para distintos valores de la escala del mismo, graficamos lospuntos obtenidos con respecto a los valores de dicha escala, y unimoslos puntos obtenidos con líneas rectas. La curva de corrección de unvoltímetro de 50V podría tener la forma presentada en la Fig. 3.
16
Fig. 3.-Gráfico de Corrección
2.4. RESOLUCION.
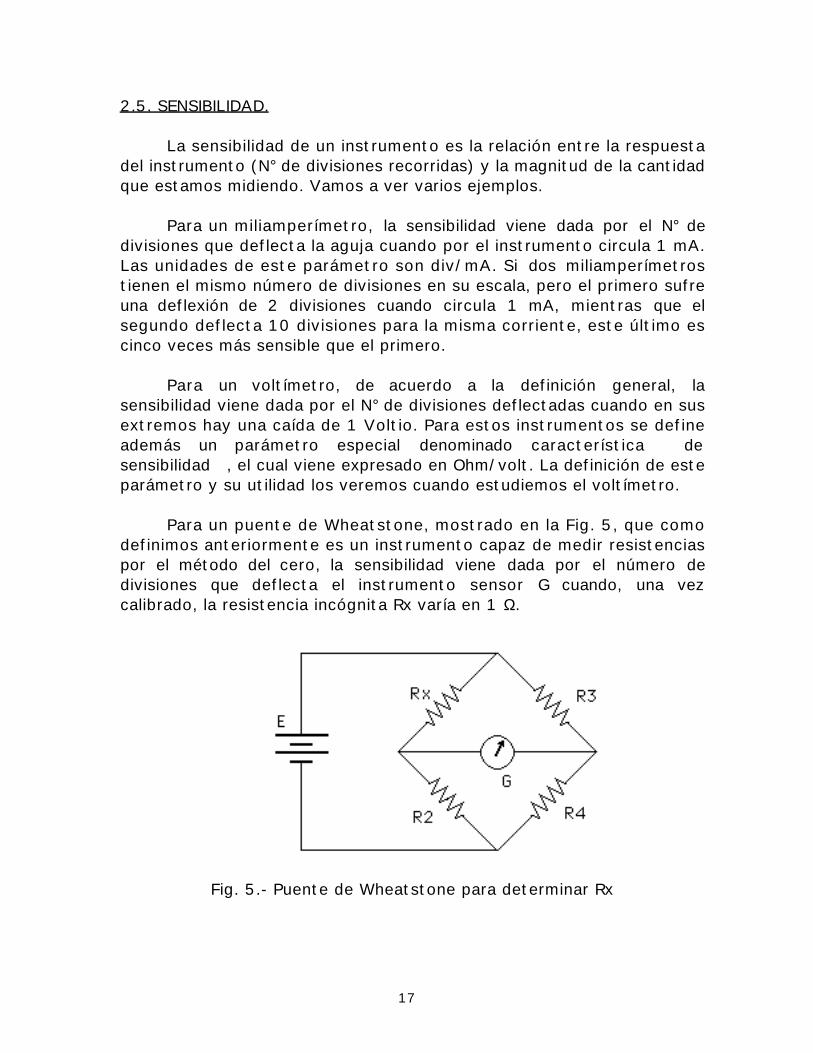
Esta característica está relacionada con la precisión. La resoluciónde un instrumento es el menor incremento de la variable bajo mediciónque puede ser detectado con certidumbre por dicho instrumento. Porejemplo, en el caso del reloj digital que vimos anteriormente, laresolución es de una centésima de segundo. Si tenemos un amperímetrocon la escala mostrada en la Fig. 4, cada una de las divisionescorresponde a 1 mA.
Fig. 4.- Escala de un miliamperímetro
Como podemos determinar con certidumbre si la aguja seencuentra exactamente sobre uno de los segmentos o entre dos deellos, la resolución es de 0.5 mA.
17
2.5. SENSIBILIDAD.
La sensibilidad de un instrumento es la relación entre la respuestadel instrumento (N° de divisiones recorridas) y la magnitud de la cantidadque estamos midiendo. Vamos a ver varios ejemplos.
Para un miliamperímetro, la sensibilidad viene dada por el N° dedivisiones que deflecta la aguja cuando por el instrumento circula 1 mA.Las unidades de este parámetro son div/mA. Si dos miliamperímetrostienen el mismo número de divisiones en su escala, pero el primero sufreuna deflexión de 2 divisiones cuando circula 1 mA, mientras que elsegundo deflecta 10 divisiones para la misma corriente, este último escinco veces más sensible que el primero.
Para un voltímetro, de acuerdo a la definición general, lasensibilidad viene dada por el N° de divisiones deflectadas cuando en susextremos hay una caída de 1 Voltio. Para estos instrumentos se defineademás un parámetro especial denominado característica desensibilidad , el cual viene expresado en Ohm/volt. La definición de esteparámetro y su utilidad los veremos cuando estudiemos el voltímetro.
Para un puente de Wheatstone, mostrado en la Fig. 5, que comodefinimos anteriormente es un instrumento capaz de medir resistenciaspor el método del cero, la sensibilidad viene dada por el número dedivisiones que deflecta el instrumento sensor G cuando, una vezcalibrado, la resistencia incógnita Rx varía en 1 Ω.
Fig. 5.- Puente de Wheatstone para determinar Rx
18
Para un potenciómetro, que es un instrumento capaz de medirvoltajes por el método de detección de cero, la sensibilidad viene dadapor el número de divisiones que deflecta el instrumento sensor cuando,una vez que se ha conseguido la condición de equilibrio, el voltajeincógnita varía cierta cantidad (1V; 0.1V; 1mV) dependiendo delinstrumento.
2.6 GAMA Y ESCALA.
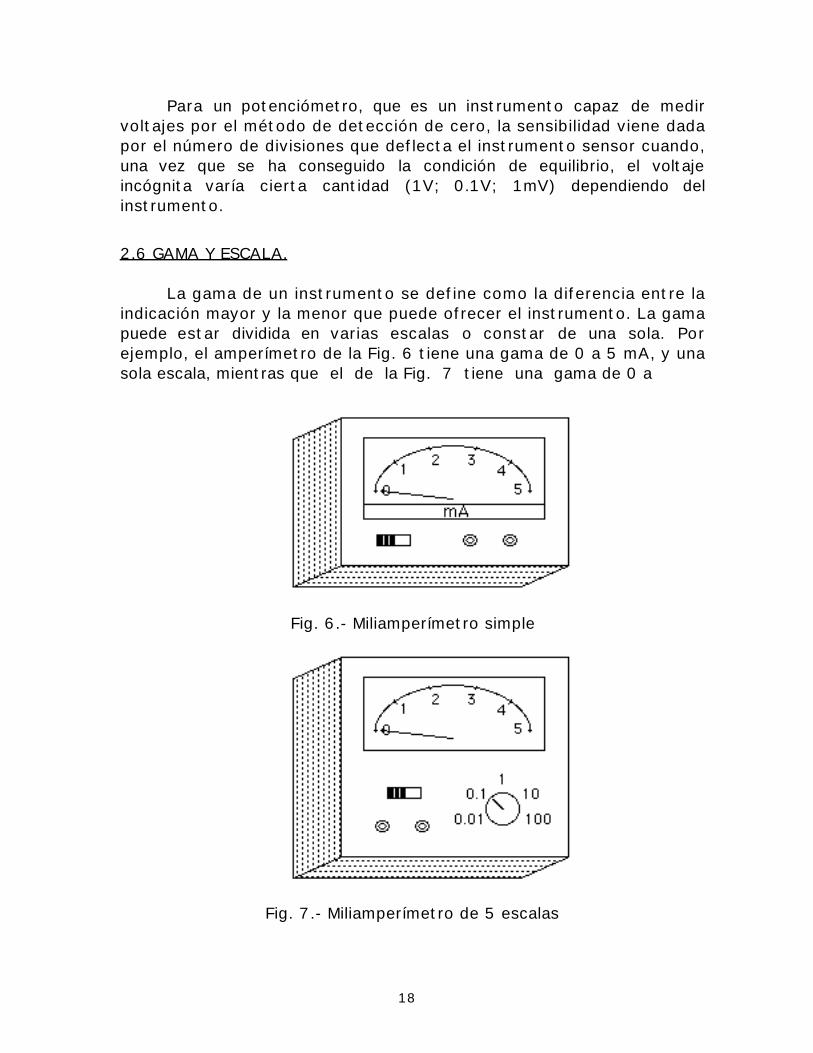
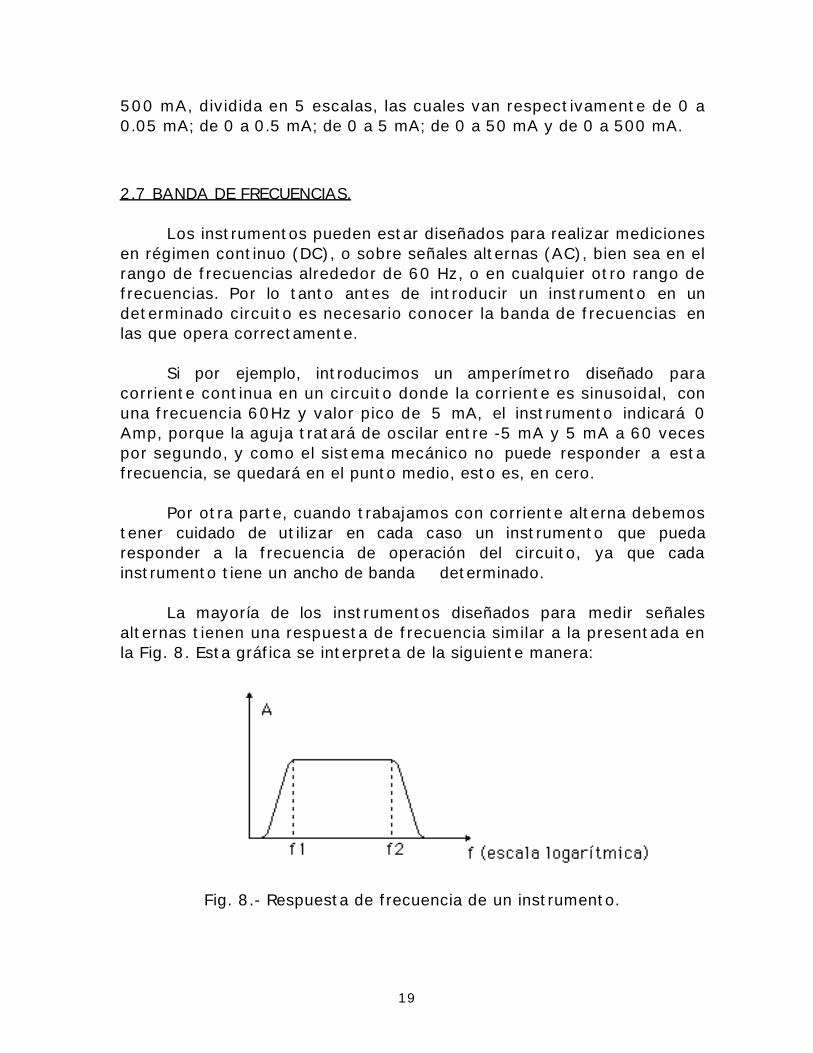
La gama de un instrumento se define como la diferencia entre laindicación mayor y la menor que puede ofrecer el instrumento. La gamapuede estar dividida en varias escalas o constar de una sola. Porejemplo, el amperímetro de la Fig. 6 tiene una gama de 0 a 5 mA, y unasola escala, mientras que el de la Fig. 7 tiene una gama de 0 a
Fig. 6.- Miliamperímetro simple
Fig. 7.- Miliamperímetro de 5 escalas
19
500 mA, dividida en 5 escalas, las cuales van respectivamente de 0 a0.05 mA; de 0 a 0.5 mA; de 0 a 5 mA; de 0 a 50 mA y de 0 a 500 mA.
2.7 BANDA DE FRECUENCIAS.
Los instrumentos pueden estar diseñados para realizar medicionesen régimen continuo (DC), o sobre señales alternas (AC), bien sea en elrango de frecuencias alrededor de 60 Hz, o en cualquier otro rango defrecuencias. Por lo tanto antes de introducir un instrumento en undeterminado circuito es necesario conocer la banda de frecuencias enlas que opera correctamente.
Si por ejemplo, introducimos un amperímetro diseñado paracorriente continua en un circuito donde la corriente es sinusoidal, conuna frecuencia 60Hz y valor pico de 5 mA, el instrumento indicará 0Amp, porque la aguja tratará de oscilar entre -5 mA y 5 mA a 60 vecespor segundo, y como el sistema mecánico no puede responder a estafrecuencia, se quedará en el punto medio, esto es, en cero.
Por otra parte, cuando trabajamos con corriente alterna debemostener cuidado de utilizar en cada caso un instrumento que puedaresponder a la frecuencia de operación del circuito, ya que cadainstrumento tiene un ancho de banda determinado.
La mayoría de los instrumentos diseñados para medir señalesalternas tienen una respuesta de frecuencia similar a la presentada enla Fig. 8. Esta gráfica se interpreta de la siguiente manera:
Fig. 8.- Respuesta de frecuencia de un instrumento.
20
Si la frecuencia de operación del circuito en el que se conecta elinstrumento se encuentra entre f1 y f2, el instrumento responde enforma "normal" según sus especificaciones, y la lectura del instrumentose corresponde con la magnitud medida, dentro del rango de exactitud yprecisión que posea dicho instrumento. Pero si la frecuencia es mayorque f2 o menor que f1, la respuesta del instrumento sufre cierto gradode atenuación, lo cual significa que la lectura que indica el instrumentoes menor que la verdadera magnitud bajo medición. Así por ejemplo, si seusa un vatímetro "standard" para medir la potencia en un dispositivo deun circuito AC a 60 Hz, su lectura será confiable, dentro del rango deexactitud y precisión que posea el instrumento, pero si se trata deutilizar este mismo instrumento para realizar mediciones de potencia encircuitos que operan a frecuencias mucho mayores, las lecturas seránerróneas, y por lo general mucho menores que las verdaderasmagnitudes bajo medición.
Las frecuencias f1 y f2 se denominan respectivamentefrecuencia de corte inferior y frecuencia de corte superior, yse definen como las frecuencias para las cuales la ganancia delinstrumento (esto es, el factor por el cual se multiplica la señal bajomedición para obtener la variable que presenta el instrumento comomedida) es igual a la ganancia de frecuencias medias dividida entre 2 .Se denomina ancho de banda (∆f) a la diferencia ∆f= f2 - f1.
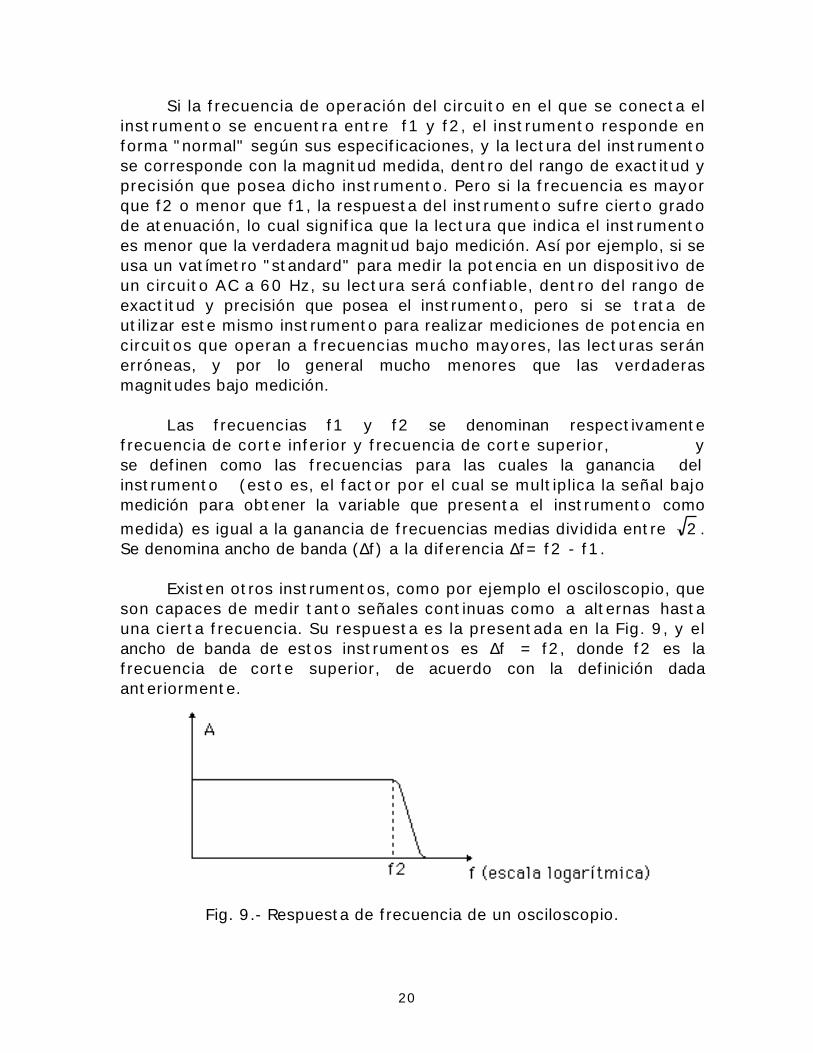
Existen otros instrumentos, como por ejemplo el osciloscopio, queson capaces de medir tanto señales continuas como a alternas hastauna cierta frecuencia. Su respuesta es la presentada en la Fig. 9, y elancho de banda de estos instrumentos es ∆f = f2, donde f2 es lafrecuencia de corte superior, de acuerdo con la definición dadaanteriormente.
Fig. 9.- Respuesta de frecuencia de un osciloscopio.
21
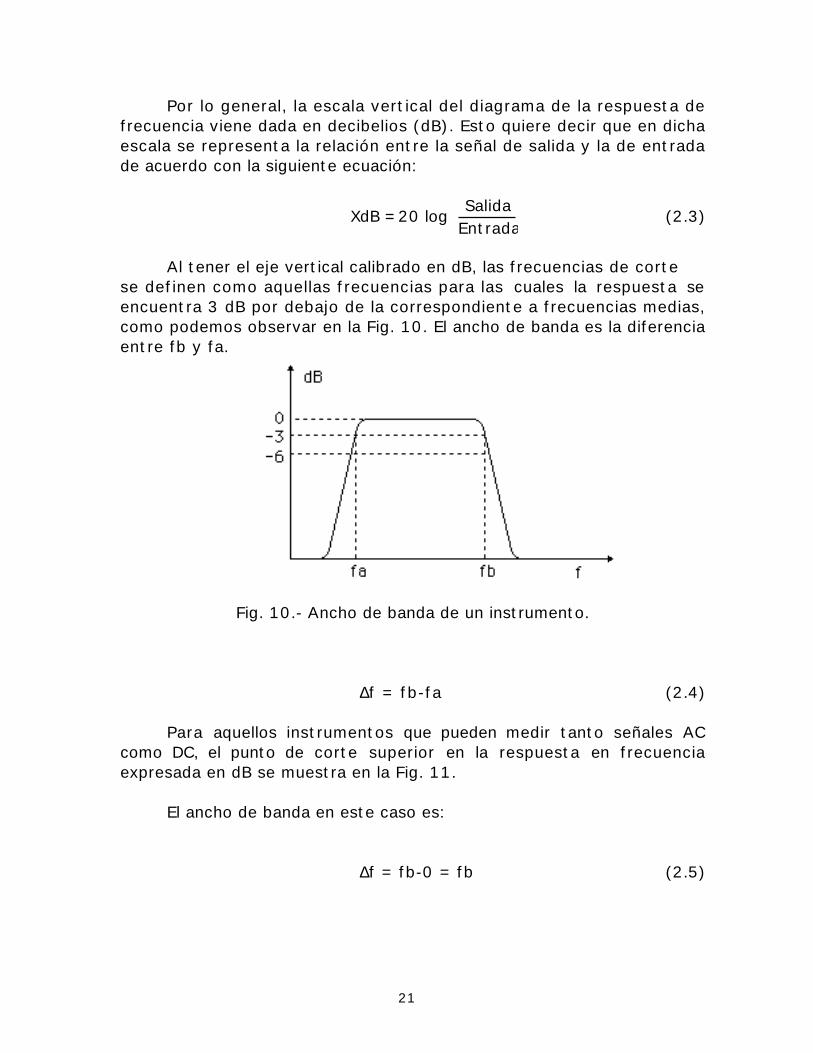
Por lo general, la escala vertical del diagrama de la respuesta defrecuencia viene dada en decibelios (dB). Esto quiere decir que en dichaescala se representa la relación entre la señal de salida y la de entradade acuerdo con la siguiente ecuación:
XdB = 20 log
SalidaEntrada
(2.3)
Al tener el eje vertical calibrado en dB, las frecuencias de cortese definen como aquellas frecuencias para las cuales la respuesta seencuentra 3 dB por debajo de la correspondiente a frecuencias medias,como podemos observar en la Fig. 10. El ancho de banda es la diferenciaentre fb y fa.
Fig. 10.- Ancho de banda de un instrumento.
∆f = fb-fa (2.4)
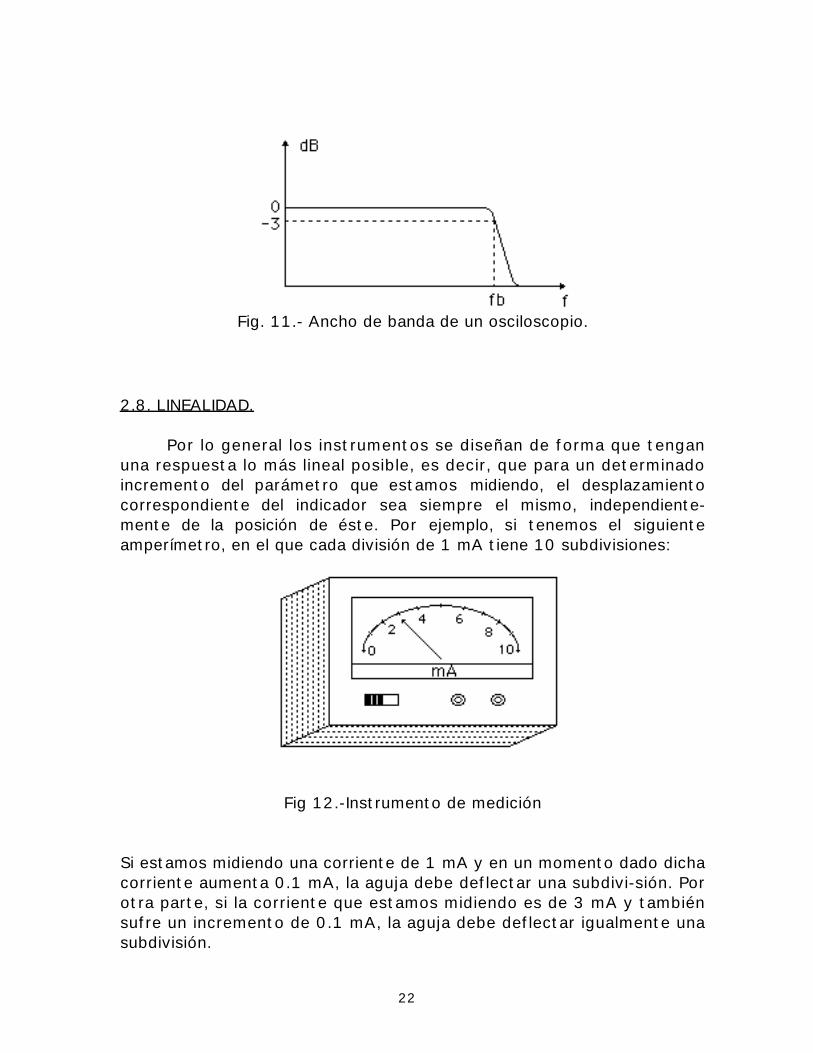
Para aquellos instrumentos que pueden medir tanto señales ACcomo DC, el punto de corte superior en la respuesta en frecuenciaexpresada en dB se muestra en la Fig. 11.
El ancho de banda en este caso es:
∆f = fb-0 = fb (2.5)
22
Fig. 11.- Ancho de banda de un osciloscopio.
2.8. LINEALIDAD.
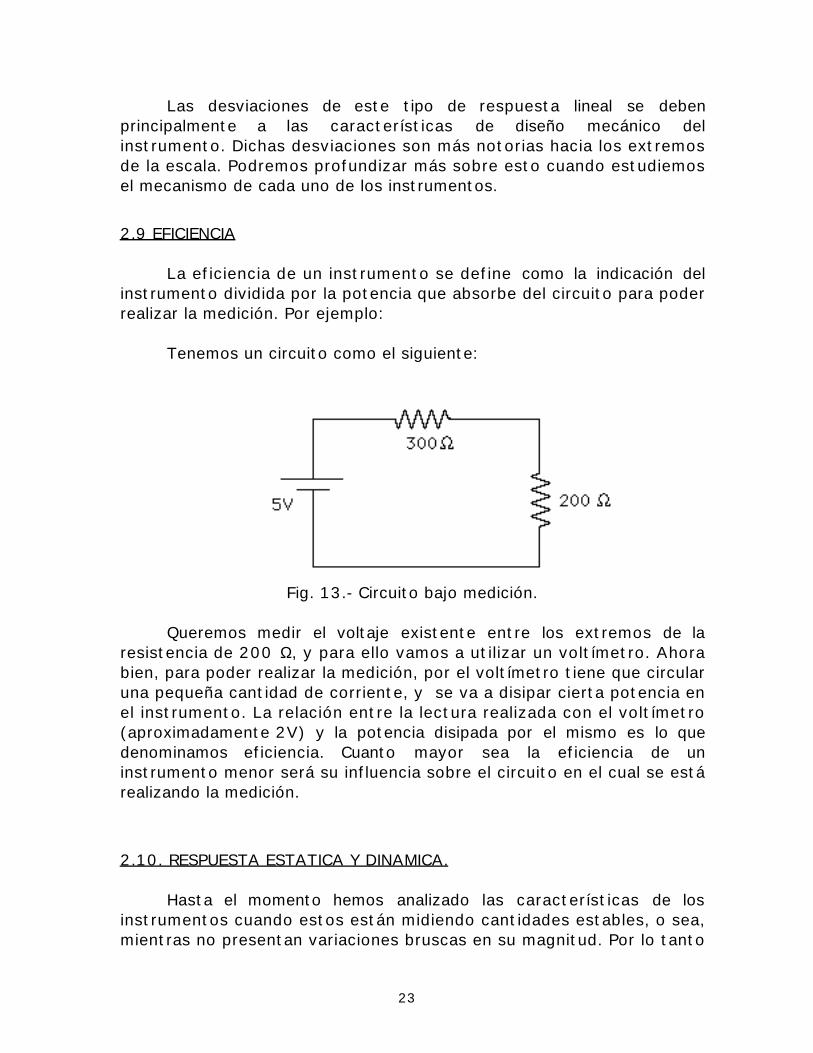
Por lo general los instrumentos se diseñan de forma que tenganuna respuesta lo más lineal posible, es decir, que para un determinadoincremento del parámetro que estamos midiendo, el desplazamientocorrespondiente del indicador sea siempre el mismo, independiente-mente de la posición de éste. Por ejemplo, si tenemos el siguienteamperímetro, en el que cada división de 1 mA tiene 10 subdivisiones:
Fig 12.-Instrumento de medición
Si estamos midiendo una corriente de 1 mA y en un momento dado dichacorriente aumenta 0.1 mA, la aguja debe deflectar una subdivi-sión. Porotra parte, si la corriente que estamos midiendo es de 3 mA y tambiénsufre un incremento de 0.1 mA, la aguja debe deflectar igualmente unasubdivisión.
23
Las desviaciones de este tipo de respuesta lineal se debenprincipalmente a las características de diseño mecánico delinstrumento. Dichas desviaciones son más notorias hacia los extremosde la escala. Podremos profundizar más sobre esto cuando estudiemosel mecanismo de cada uno de los instrumentos.
2.9 EFICIENCIA
La eficiencia de un instrumento se define como la indicación delinstrumento dividida por la potencia que absorbe del circuito para poderrealizar la medición. Por ejemplo:
Tenemos un circuito como el siguiente:
Fig. 13.- Circuito bajo medición.
Queremos medir el voltaje existente entre los extremos de laresistencia de 200 Ω, y para ello vamos a utilizar un voltímetro. Ahorabien, para poder realizar la medición, por el voltímetro tiene que circularuna pequeña cantidad de corriente, y se va a disipar cierta potencia enel instrumento. La relación entre la lectura realizada con el voltímetro(aproximadamente 2V) y la potencia disipada por el mismo es lo quedenominamos eficiencia. Cuanto mayor sea la eficiencia de uninstrumento menor será su influencia sobre el circuito en el cual se estárealizando la medición.
2.10. RESPUESTA ESTATICA Y DINAMICA.
Hasta el momento hemos analizado las características de losinstrumentos cuando estos están midiendo cantidades estables, o sea,mientras no presentan variaciones bruscas en su magnitud. Por lo tanto
24
a todas estas características mencionadas anteriormente podemosdenominarlas estáticas . Ahora bien, puede ocurrir que la cantidad bajomedición sufra una variación en un momento determinado y por lo tantoes necesario que conozcamos el comportamiento dinámico delinstrumento cuando sucedan estas variaciones. Para realizar el análisisdinámico del instrumento podemos aplicar un cambio brusco de unestado a otro (la función escalón).
Vamos a definir una serie de parámetros dinámicos.
2.10.1.- Error dinámico
El error dinámico de un instrumento se define como la diferenciaentre la cantidad indicada en un instante de tiempo dado y el verdaderovalor del parámetro que se está midiendo. Supongamos que tenemos uninstrumento al que le aplicamos la función mostrada en la Fig. 14:
Fig. 14.- Función de entrada de un instrumento
Esto quiere decir que si por ejemplo se trata de un voltímetro,hacemos variar bruscamente el voltaje entre sus extremos.
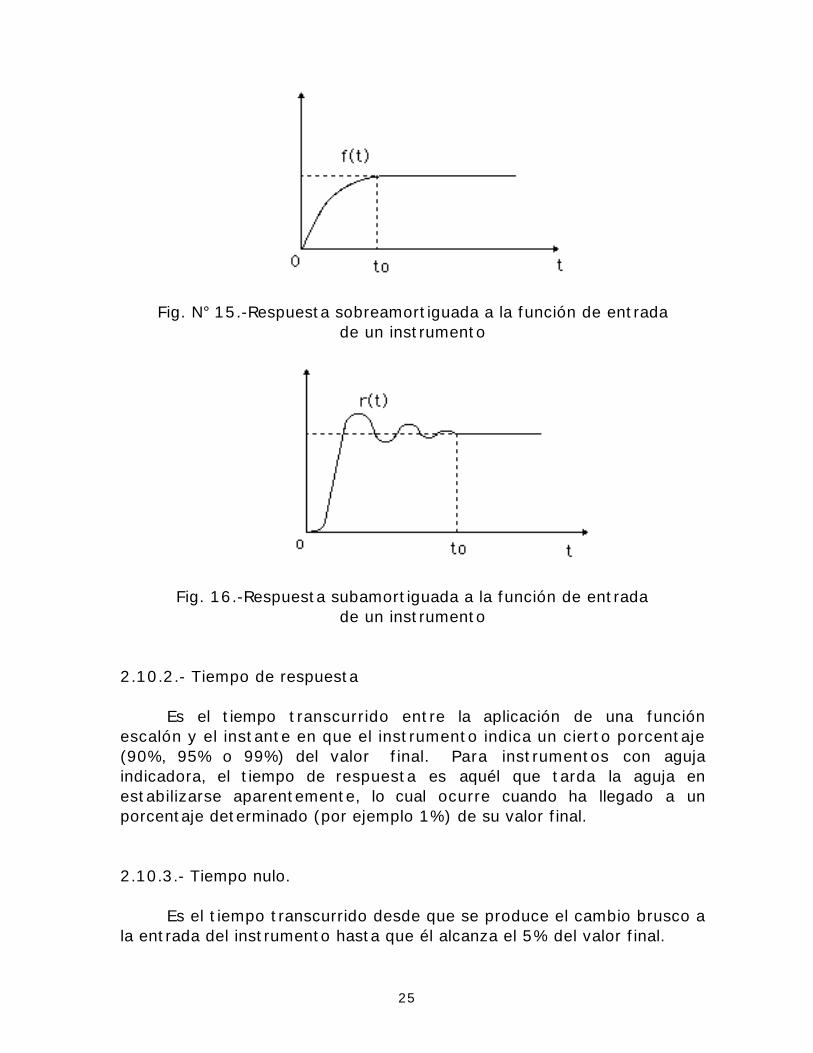
La respuesta del instrumento en función del tiempo puedepresentar diferentes formas, como puede apreciarse en las Fig. 15 y16. Según podemos observar, para todo instante de tiempo menor queto existe una diferencia entre la función aplicada y la respuesta delinstrumento. Esta diferencia es lo que denominamos error dinámico.
25
Fig. N° 15.-Respuesta sobreamortiguada a la función de entradade un instrumento
Fig. 16.-Respuesta subamortiguada a la función de entrada
de un instrumento
2.10.2.- Tiempo de respuesta
Es el tiempo transcurrido entre la aplicación de una funciónescalón y el instante en que el instrumento indica un cierto porcentaje(90%, 95% o 99%) del valor final. Para instrumentos con agujaindicadora, el tiempo de respuesta es aquél que tarda la aguja enestabilizarse aparentemente, lo cual ocurre cuando ha llegado a unporcentaje determinado (por ejemplo 1%) de su valor final.
2.10.3.- Tiempo nulo.
Es el tiempo transcurrido desde que se produce el cambio brusco ala entrada del instrumento hasta que él alcanza el 5% del valor final.
26
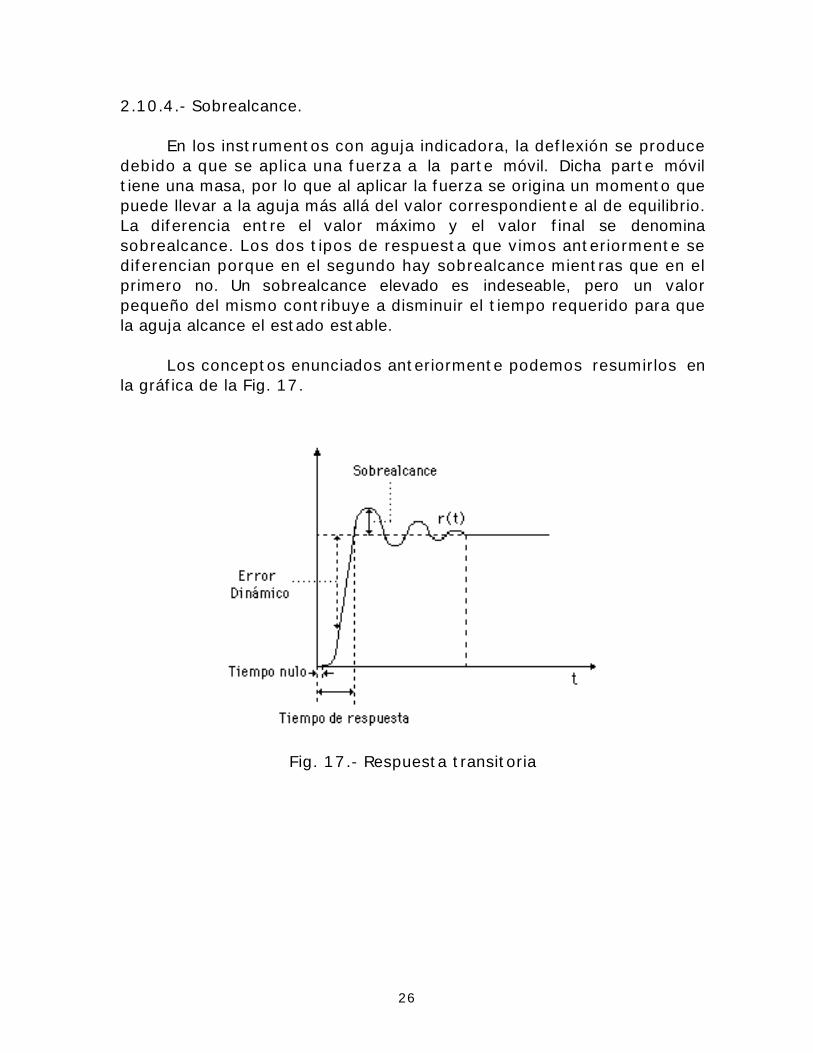
2.10.4.- Sobrealcance.
En los instrumentos con aguja indicadora, la deflexión se producedebido a que se aplica una fuerza a la parte móvil. Dicha parte móviltiene una masa, por lo que al aplicar la fuerza se origina un momento quepuede llevar a la aguja más allá del valor correspondiente al de equilibrio.La diferencia entre el valor máximo y el valor final se denominasobrealcance. Los dos tipos de respuesta que vimos anteriormente sediferencian porque en el segundo hay sobrealcance mientras que en elprimero no. Un sobrealcance elevado es indeseable, pero un valorpequeño del mismo contribuye a disminuir el tiempo requerido para quela aguja alcance el estado estable.
Los conceptos enunciados anteriormente podemos resumirlos enla gráfica de la Fig. 17.
Fig. 17.- Respuesta transitoria
27
CAPITULO III
ERRORES
Dadas las limitaciones de los instrumentos, no puede hacerseninguna medición con completa exactitud, por lo que es necesario quetengamos muy en cuenta los errores que se pueden cometer. Esto noquiere decir que en todas las mediciones sea necesario alcanzar elmayor grado de exactitud posible, sino que dicho grado va a dependerde los requisitos establecidos para cada medición en particular.
Una gran exactitud requiere por lo general un equipo muy costosoy un trabajo sumamente largo y laborioso, lo cual no siempre estájustificado. Si por ejemplo, estamos realizando una serie deinvestigaciones para diseñar un nuevo instrumento muy preciso y demuy alta calidad, en cada uno de los experimentos que llevamos a caboserá necesario obtener resultados con una exactitud de 0.1% ó 0.01%.Pero por otra parte, si tenemos una serie de instrumentos que formanparte de un sistema de control automático de temperatura en unproceso realizado a altas temperaturas, la exactitud con que dichosinstrumentos realicen las mediciones puede tener tolerancias mayores,ya que si la temperatura debe regularse alrededor de 500°C con unaprecisión del 20%, da lo mismo saber que está a 510°C o a 495°C.
Ahora bien, es importante que en cada experimento sepamos conqué exactitud estamos obteniendo los resultados para poder utilizarlosdespués correctamente.
A continuación vamos a estudiar los errores que se puedenpresentar durante las mediciones. Para ello vamos a clasificarlos de lasiguiente forma:
- Errores grandes
- Errores sistemáticos- Del instrumento- Del método utilizado- Ambientales- De observación
28
3.1 ERRORES GRANDES.
Por lo general, son los errores cometidos por la persona que estárealizando el experimento, debido a una mala lectura o a un registro deinformación equivocado. Por ejemplo, supongamos que estamosmidiendo la corriente que circula por un circuito con unmiliamperímetro, el cual indica 1.17 mA, pero nosotros anotamos en elcuaderno 1.77 mA.
Estos errores no pueden tratarse matemáticamente y debemosevitarlos a toda costa. Para ello es necesario que tengamos muchocuidado tanto al realizar la medición como al efectuar las anotaciones.Siempre que nos sea posible, es conveniente que repitamos cadamedición tres veces, ya que si algún resultado difiere mucho de losotros dos podemos analizar las causas y descartarlo.
3.2 ERRORES SISTEMATICOS.
3.2.1 - Del instrumento.
Se deben a inexactitudes del instrumento debido a la toleranciaque presentan sus componentes internos, a una mala calibración, o aldesgaste que pueda tener debido al uso. Vamos a ver unos ejemplos:
Las mediciones que se realizan con un voltímetro dependen de laresistencia interna del mismo. Si el valor de dicha resistencia se haalterado con el tiempo, los resultados que obtengamos con estevoltímetro no tendrán la exactitud que deberían.
Si en un puente de Wheatstone se altera el factor K = R3/R4debido a que varía el valor de dichas resistencias, todas las medicionesque realicemos con él presentarán un error sistemático.
Para evitar estos errores es necesario que calibremosperiódicamente los instrumentos o que comparemos sus indicacionescon patrones de referencia para ver si existe algún factor que alterelas mediciones y poder aplicar a las mismas otro factor apropiado quecompense dicho error.
29
3.2.2 - Del método utilizado.
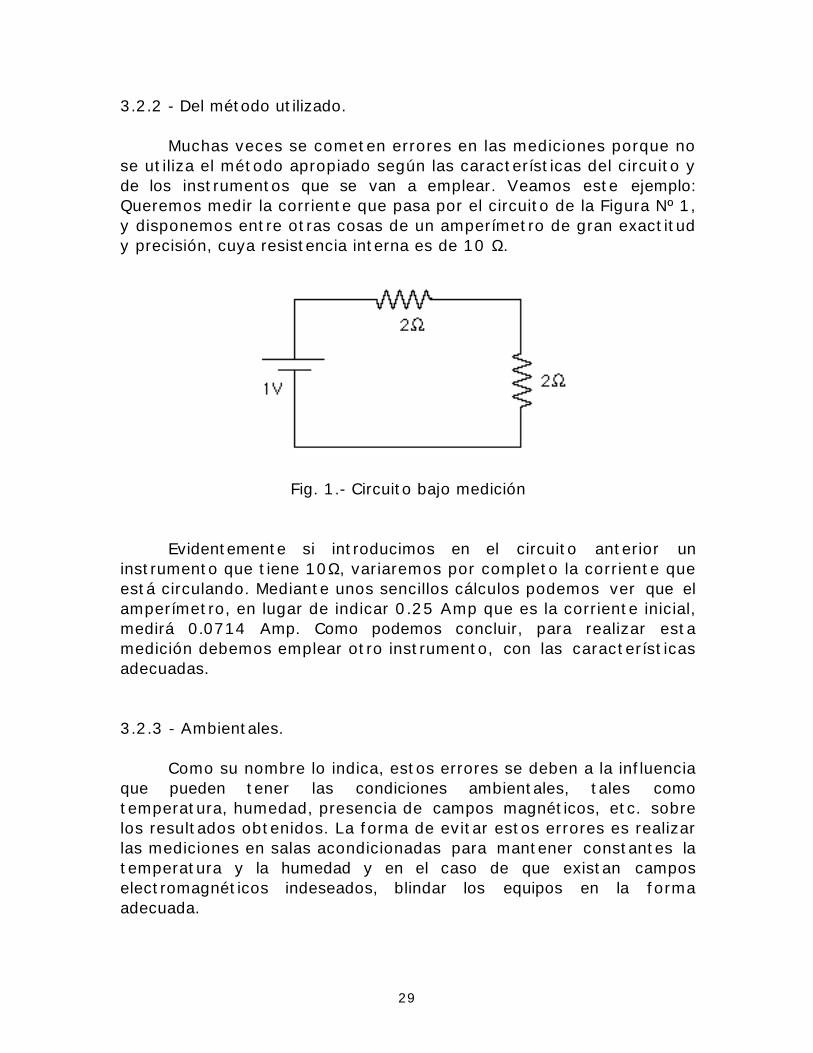
Muchas veces se cometen errores en las mediciones porque nose utiliza el método apropiado según las características del circuito yde los instrumentos que se van a emplear. Veamos este ejemplo:Queremos medir la corriente que pasa por el circuito de la Figura Nº 1,y disponemos entre otras cosas de un amperímetro de gran exactitudy precisión, cuya resistencia interna es de 10 Ω.
Fig. 1.- Circuito bajo medición
Evidentemente si introducimos en el circuito anterior uninstrumento que tiene 10Ω, variaremos por completo la corriente queestá circulando. Mediante unos sencillos cálculos podemos ver que elamperímetro, en lugar de indicar 0.25 Amp que es la corriente inicial,medirá 0.0714 Amp. Como podemos concluir, para realizar estamedición debemos emplear otro instrumento, con las característicasadecuadas.
3.2.3 - Ambientales.
Como su nombre lo indica, estos errores se deben a la influenciaque pueden tener las condiciones ambientales, tales comotemperatura, humedad, presencia de campos magnéticos, etc. sobrelos resultados obtenidos. La forma de evitar estos errores es realizarlas mediciones en salas acondicionadas para mantener constantes latemperatura y la humedad y en el caso de que existan camposelectromagnéticos indeseados, blindar los equipos en la formaadecuada.

30
3.2.4 - De observación.
Son los errores debidos a la forma de trabajar de la persona queestá realizando el experimento. Uno de los más comunes es el error deparalaje, el cual lo podemos evitar si realizamos la lectura mirando defrente al instrumento. Otro error frecuente es leer un instrumentoantes de que se haya estabilizado completamente en el valorcorrespondiente.
31
CAPITULO IV
COMPONENTES
4.1 INTRODUCCION.
Para poder analizar o diseñar un circuito eléctrico, es necesarioque conozcamos las características de los componentes físicos quepueden formar parte de él. El objetivo de este capítulo es estudiaralgunos de los componentes más comunes.
En primer lugar, vamos a establecer la diferencia entreparámetro eléctrico y componente circuital (elemento).
Un componente circuital es el elemento físico con el cualcontamos para montar un circuito. Ahora bien, todo componentecircuital presenta una serie de características eléctricas: Resistencia,capacitancia, inductancia, etc. Estas características eléctricas son losparámetros del componente con el cual contamos.
Por lo tanto, los condensadores, las bobinas (o inductores) y losresistores entre otros, son componentes circuitales, cada uno de loscuales puede representarse mediante parámetros eléctricos(resistencia, capacitancia, inductancia, etc.).
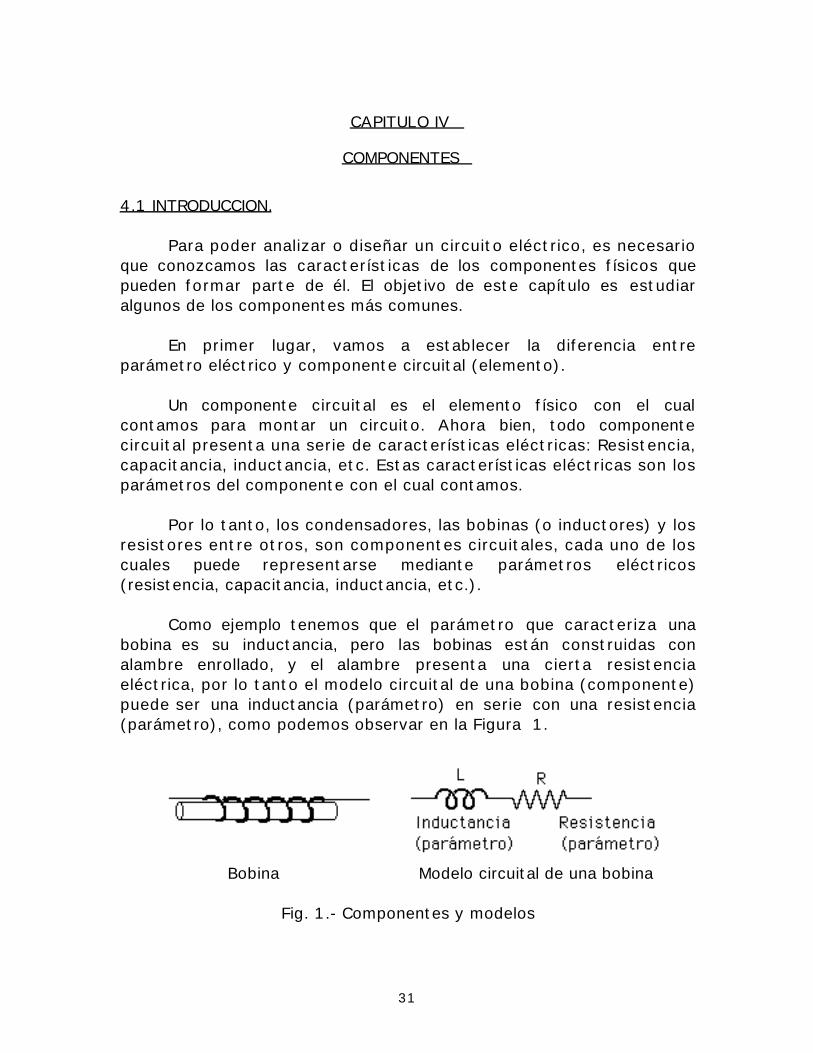
Como ejemplo tenemos que el parámetro que caracteriza unabobina es su inductancia, pero las bobinas están construidas conalambre enrollado, y el alambre presenta una cierta resistenciaeléctrica, por lo tanto el modelo circuital de una bobina (componente)puede ser una inductancia (parámetro) en serie con una resistencia(parámetro), como podemos observar en la Figura 1.
Bobina Modelo circuital de una bobina
Fig. 1.- Componentes y modelos
32
A medida que vayamos estudiando cada uno de los componentesfísicos, iremos indicando cuál es su modelo circuital (constituido por losparámetros que lo caracterizan) y la justificación de la escogencia dedicho modelo.
Una observación: Aunque el componente circuital que secaracteriza fundamentalmente por su resistencia se debería denominarresistor, es costumbre utilizar la palabra resistencia para referirsetambién al componente físico.
4.2 CLASIFICACION GENERAL DE LOS PARAMETROS ELECTRICOS
Los parámetros se clasifican de acuerdo a cuatro aspectosdiferentes, a saber:
- Concentrados o distribuidos- Activos o pasivos- Variables o invariables con el tiempo- Lineales o no lineales
4.2.1.- Parámetros Concentrados o Distribuidos.
Un parámetro concentrado es aquél cuyas magnitudes físicas sontales que podemos considerarlo ubicado en un punto del espacio. Porotra parte, un parámetro distribuido es aquél que como su nombre loindica, se encuentra distribuido en una región del espacio.
Ahora bien, ¿cuál es el criterio que nos permite determinar sitenemos que considerar un parámetro como concentrado odistribuido?. Este criterio es la frecuencia de operación del sistema.Vamos a profundizar un poco sobre este punto.
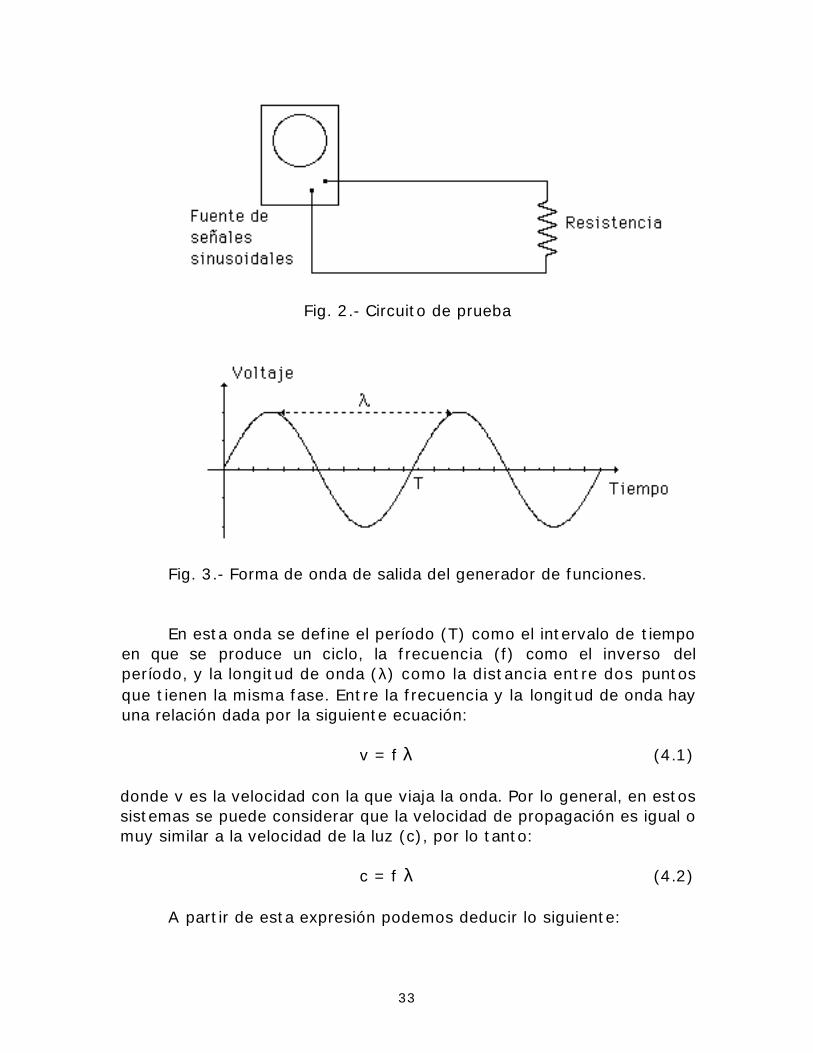
Consideremos el circuito de prueba de la Figura 2, el cual constade un generador de funciones y una resistencia.
La fuente de señales sinusoidales produce voltajes alternos, quepueden representarse en función del tiempo como se indica en la Figura3.
33
Fig. 2.- Circuito de prueba
Fig. 3.- Forma de onda de salida del generador de funciones.
En esta onda se define el período (T) como el intervalo de tiempoen que se produce un ciclo, la frecuencia (f) como el inverso delperíodo, y la longitud de onda (λ) como la distancia entre dos puntosque tienen la misma fase. Entre la frecuencia y la longitud de onda hayuna relación dada por la siguiente ecuación:
v = f λ (4.1)
donde v es la velocidad con la que viaja la onda. Por lo general, en estossistemas se puede considerar que la velocidad de propagación es igual omuy similar a la velocidad de la luz (c), por lo tanto:
c = f λ (4.2)
A partir de esta expresión podemos deducir lo siguiente:
34
Si la frecuencia de la señal de voltaje es igual a 60Hz (frecuenciade operación de la red nacional) la longitud de onda de dicha señal es:
λ =
cf
=3 × 108m /seg
60seg−1= 5 × 106m = 5000 Km (4.3)
Por lo tanto, si el circuito presenta una longitud total de mediometro, esta distancia es despreciable frente a los 5000 Km de lalongitud de onda, por lo que podemos considerar que la señal eléctricatiene la misma fase en todos los puntos del circuito, o lo que esequivalente, para los efectos de la señal de voltaje, todo el circuito seencuentra ubicado en el mismo punto del espacio, y en consecuenciatodos los parámetros del mismo están concentrados en dicho punto.
Si por el contrario, la frecuencia de la señal de voltaje es muyalta, por ejemplo 30GHz (lGHz=lO9Hz), la longitud de onda de dicha señales:
λ =
3 × 108m /seg30 × 109seg−1
= 0.01 m = 1 cm (4.4)
Si como en el caso anterior la longitud total del circuito es igual amedio metro, en cada punto del circuito la señal tendrá una fasediferente, y por lo tanto los parámetros del circuito (característicasde los conductores, resistencia del elemento terminal), tienen queconsiderarse distribuidos en distintos puntos del espacio, a travésdel cual está viajando la onda.
El conjunto de leyes y principios que rigen los fenómenoselectromagnéticos, entre los cuales se encuentran los que hemosenunciado en los dos ejemplos anteriores, constituye la TeoríaElectromagnética. Ahora bien, cuando la magnitud física del sistemadonde se estudian los fenómenos es mucho menor que la longitud deonda de los mismos, los principios básicos se pueden simplificar hastaconstituir un nuevo conjunto de leyes, que conforman la Teoría deRedes Eléctricas.
En esta última teoría nos basamos para estudiar los circuitoseléctricos, ya que los fenómenos que ocurren en ellos tienen bajasfrecuencias. Por lo tanto, los componentes de los circuitos eléctricosson concentrados .
35
Los sistemas que trabajan a altas frecuencias no se denominanpor lo general circuitos eléctricos, sino que reciben nombresparticulares, como por ejemplo sistemas de microondas. Como vimosanteriormente, los fenómenos que ocurren en estos sistemas nopueden estudiarse aplicando la Teoría de Redes Eléctricas, sino que eneste caso es necesario aplicar a la Teoría Electromagnética en toda supropiedad.
4.2.2.- Parámetros Activos o Pasivos.
Los elementos activos son aquéllos capaces de entregar energíaneta al circuito donde están conectados, mientras que los elementospasivos son aquéllos que reciben energía neta del circuito en el que seencuentran. Si en un momento dado un elemento de los clasificadoscomo pasivos le entrega cierta cantidad de energía al sistema, esporque previamente la recibió y almacenó durante un cierto período detiempo.
Veamos algunos ejemplos.
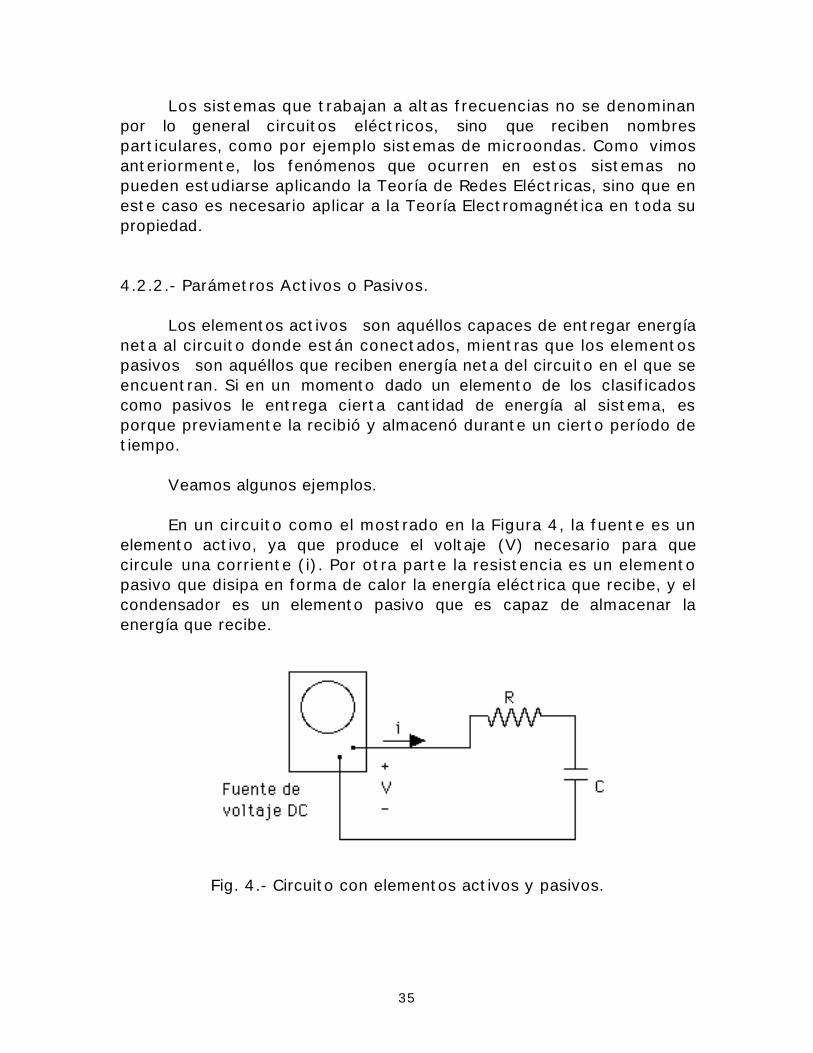
En un circuito como el mostrado en la Figura 4, la fuente es unelemento activo, ya que produce el voltaje (V) necesario para quecircule una corriente (i). Por otra parte la resistencia es un elementopasivo que disipa en forma de calor la energía eléctrica que recibe, y elcondensador es un elemento pasivo que es capaz de almacenar laenergía que recibe.
Fig. 4.- Circuito con elementos activos y pasivos.
36
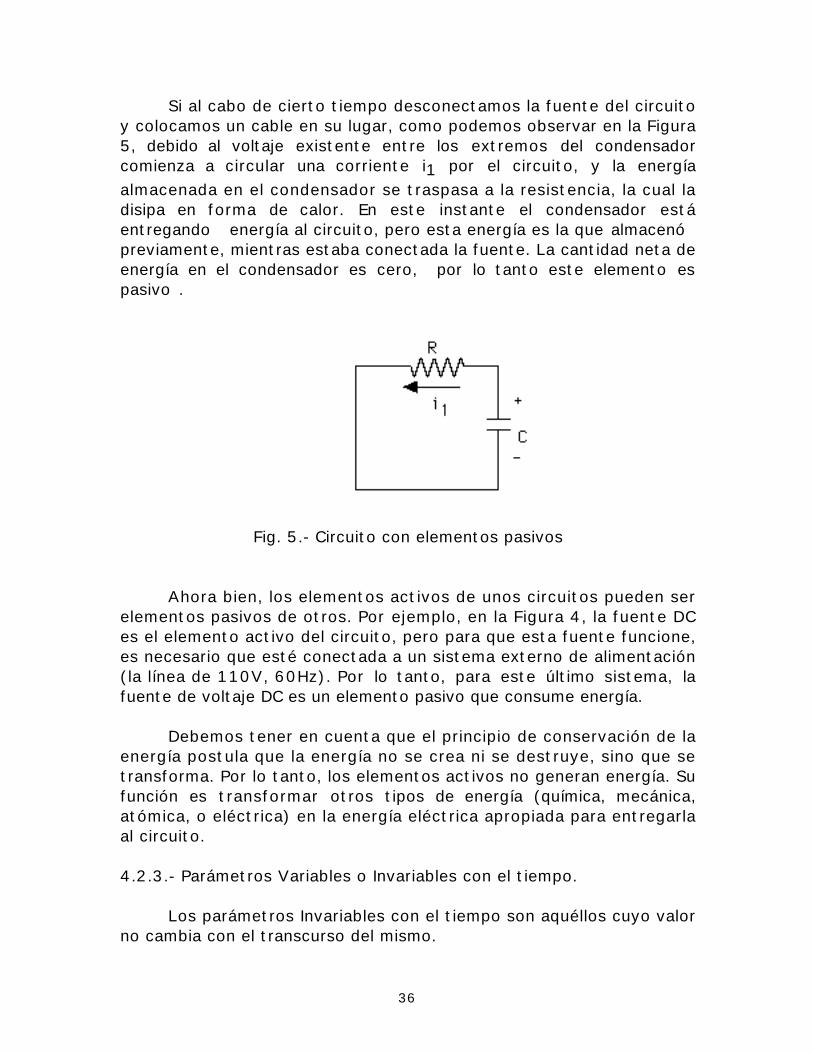
Si al cabo de cierto tiempo desconectamos la fuente del circuitoy colocamos un cable en su lugar, como podemos observar en la Figura5, debido al voltaje existente entre los extremos del condensadorcomienza a circular una corriente i1 por el circuito, y la energíaalmacenada en el condensador se traspasa a la resistencia, la cual ladisipa en forma de calor. En este instante el condensador estáentregando energía al circuito, pero esta energía es la que almacenópreviamente, mientras estaba conectada la fuente. La cantidad neta deenergía en el condensador es cero, por lo tanto este elemento espasivo .
Fig. 5.- Circuito con elementos pasivos
Ahora bien, los elementos activos de unos circuitos pueden serelementos pasivos de otros. Por ejemplo, en la Figura 4, la fuente DCes el elemento activo del circuito, pero para que esta fuente funcione,es necesario que esté conectada a un sistema externo de alimentación(la línea de 110V, 60Hz). Por lo tanto, para este último sistema, lafuente de voltaje DC es un elemento pasivo que consume energía.
Debemos tener en cuenta que el principio de conservación de laenergía postula que la energía no se crea ni se destruye, sino que setransforma. Por lo tanto, los elementos activos no generan energía. Sufunción es transformar otros tipos de energía (química, mecánica,atómica, o eléctrica) en la energía eléctrica apropiada para entregarlaal circuito.
4.2.3.- Parámetros Variables o Invariables con el tiempo.
Los parámetros Invariables con el tiempo son aquéllos cuyo valorno cambia con el transcurso del mismo.
37
Por otra parte, los parámetros Variables con el tiempo sonaquéllos que no poseen la propiedad antes enunciada.
Ahora bien, no hay componentes físicos cuyos parámetros nosufran ninguna alteración con el transcurso del tiempo, ya que todosellos se deterioran en mayor o menor grado en intervalos de tiemposuficientemente grandes. Sin embargo, aquellos elementos que seconstruyen con el propósito de que tengan un parámetro de valordeterminado durante un tiempo suficientemente largo, se considerancomo Invariables con el tiempo, mientras que aquéllos que se fabricande forma que su valor varíe en forma periódica en el tiempo dentro delrango de interés, se clasifican como Variables con el tiempo.
4.2.4.- Parámetros Lineales o No Lineales.
Los elementos Lineales son aquéllos que cumplen con laspropiedades de superposición y homogeneidad, mientras que los NoLineales son aquéllos que no poseen estas propiedades.
Repasemos brevemente la definición de las propiedadesmencionadas.
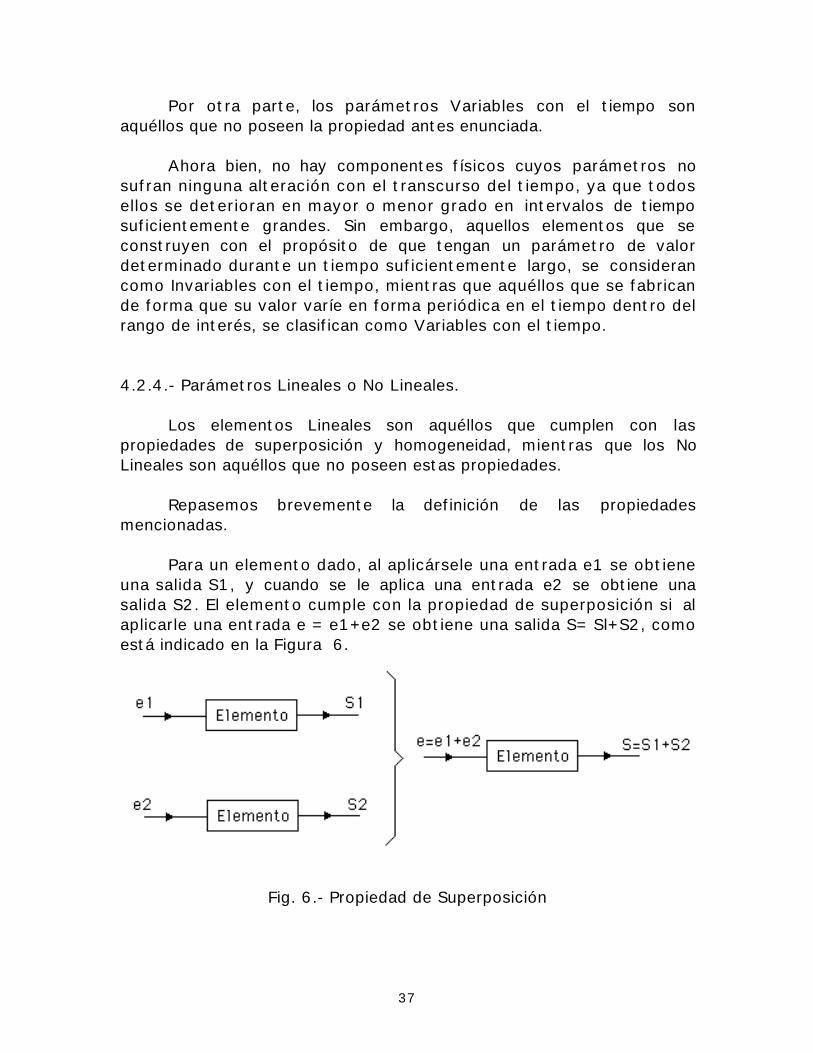
Para un elemento dado, al aplicársele una entrada e1 se obtieneuna salida S1, y cuando se le aplica una entrada e2 se obtiene unasalida S2. El elemento cumple con la propiedad de superposición si alaplicarle una entrada e = e1+e2 se obtiene una salida S= Sl+S2, comoestá indicado en la Figura 6.
Fig. 6.- Propiedad de Superposición
38
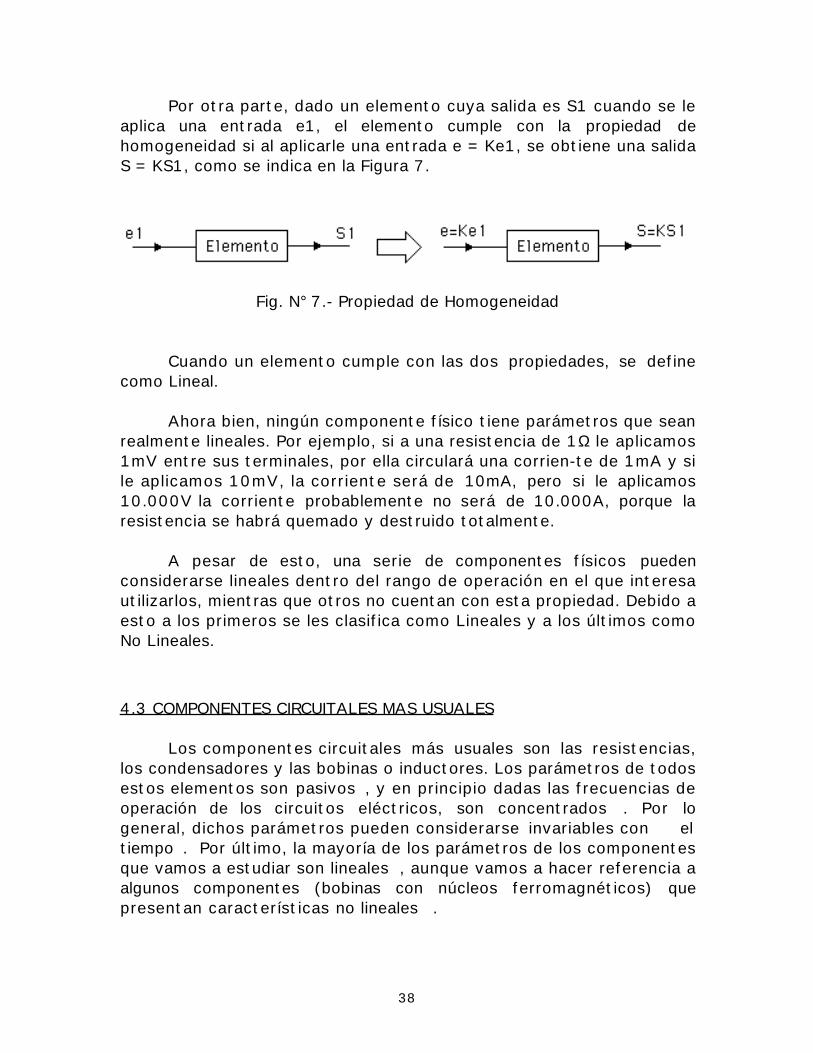
Por otra parte, dado un elemento cuya salida es S1 cuando se leaplica una entrada e1, el elemento cumple con la propiedad dehomogeneidad si al aplicarle una entrada e = Ke1, se obtiene una salidaS = KS1, como se indica en la Figura 7.
Fig. N° 7.- Propiedad de Homogeneidad
Cuando un elemento cumple con las dos propiedades, se definecomo Lineal.
Ahora bien, ningún componente físico tiene parámetros que seanrealmente lineales. Por ejemplo, si a una resistencia de 1Ω le aplicamos1mV entre sus terminales, por ella circulará una corrien-te de 1mA y sile aplicamos 10mV, la corriente será de 10mA, pero si le aplicamos10.000V la corriente probablemente no será de 10.000A, porque laresistencia se habrá quemado y destruido totalmente.
A pesar de esto, una serie de componentes físicos puedenconsiderarse lineales dentro del rango de operación en el que interesautilizarlos, mientras que otros no cuentan con esta propiedad. Debido aesto a los primeros se les clasifica como Lineales y a los últimos comoNo Lineales.
4.3 COMPONENTES CIRCUITALES MAS USUALES
Los componentes circuitales más usuales son las resistencias,los condensadores y las bobinas o inductores. Los parámetros de todosestos elementos son pasivos , y en principio dadas las frecuencias deoperación de los circuitos eléctricos, son concentrados . Por logeneral, dichos parámetros pueden considerarse invariables con eltiempo . Por último, la mayoría de los parámetros de los componentesque vamos a estudiar son lineales , aunque vamos a hacer referencia aalgunos componentes (bobinas con núcleos ferromagnéticos) quepresentan características no lineales .
39
4.4 RESISTENCIAS.
4.4.1.- Definición.
Una resistencia es un componente circuital cuya principalcaracterística es la de transformar la energía eléctrica que recibe enenergía térmica, la cual se disipa por medio de radiación, convección yconducción térmica.
Por lo general, en una resistencia puede considerarsedespreciable la energía almacenada en los campos eléctrico ymagnético existentes en el elemento.
4.4.2.- Especificaciones
4.4.2.1.- Valor nominal.
El primer dato que necesitamos conocer de una resistencia es elvalor de su parámetro R.
En principio, se podrían fabricar resistencias de todos los valoresimaginables, pero desde un punto de vista económico esto es imposible.Por lo tanto, los fabricantes se han puesto de acuerdo para produciruna serie de resistencias cuyos valores abarquen una gama losuficientemente grande, y a partir de las cuales se pueda obtenercualquier otro valor realizando combinaciones en serie o paralelo.
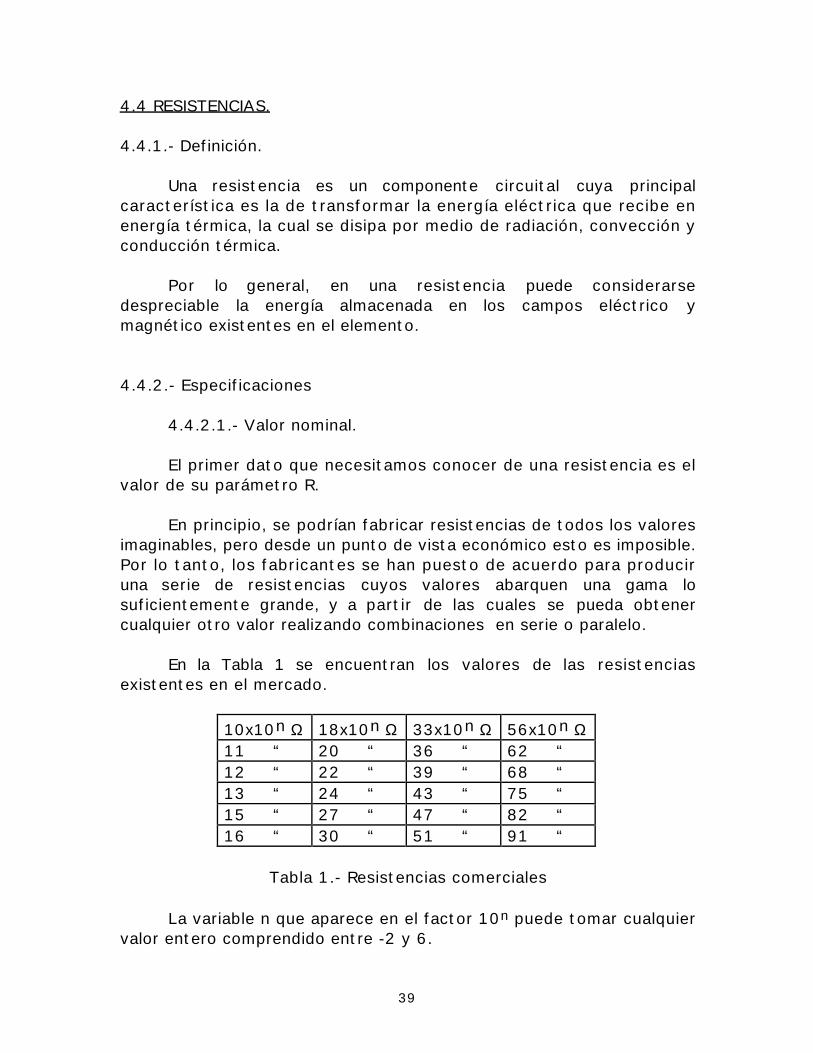
En la Tabla 1 se encuentran los valores de las resistenciasexistentes en el mercado.
10x10n Ω 18x10n Ω 33x10n Ω 56x10n Ω11 “ 20 “ 36 “ 62 “12 “ 22 “ 39 “ 68 “13 “ 24 “ 43 “ 75 “15 “ 27 “ 47 “ 82 “16 “ 30 “ 51 “ 91 “
Tabla 1.- Resistencias comerciales
La variable n que aparece en el factor 10n puede tomar cualquiervalor entero comprendido entre -2 y 6.
40
Algunas resistencias tienen escrito sobre ellas su valor nominal,como se muestra en la Figura 8.
Fig. 8.- Modelo de resistencia
Pero la mayoría de ellas, especialmente las de carbón, que son lasmás utilizadas en los circuitos electrónicos, tienen indicado su valornominal mediante un código de colores.
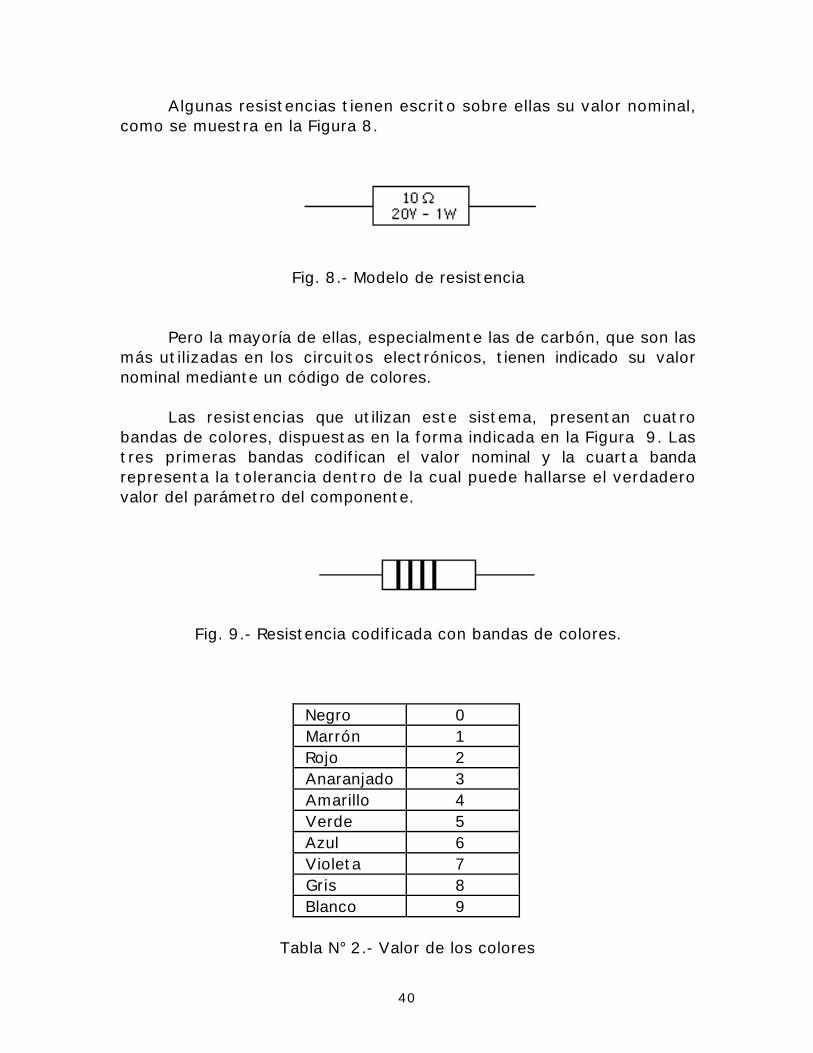
Las resistencias que utilizan este sistema, presentan cuatrobandas de colores, dispuestas en la forma indicada en la Figura 9. Lastres primeras bandas codifican el valor nominal y la cuarta bandarepresenta la tolerancia dentro de la cual puede hallarse el verdaderovalor del parámetro del componente.
Fig. 9.- Resistencia codificada con bandas de colores.
Negro 0 Marrón 1 Rojo 2 Anaranjado 3 Amarillo 4 Verde 5 Azul 6 Violeta 7 Gris 8 Blanco 9
Tabla N° 2.- Valor de los colores
41
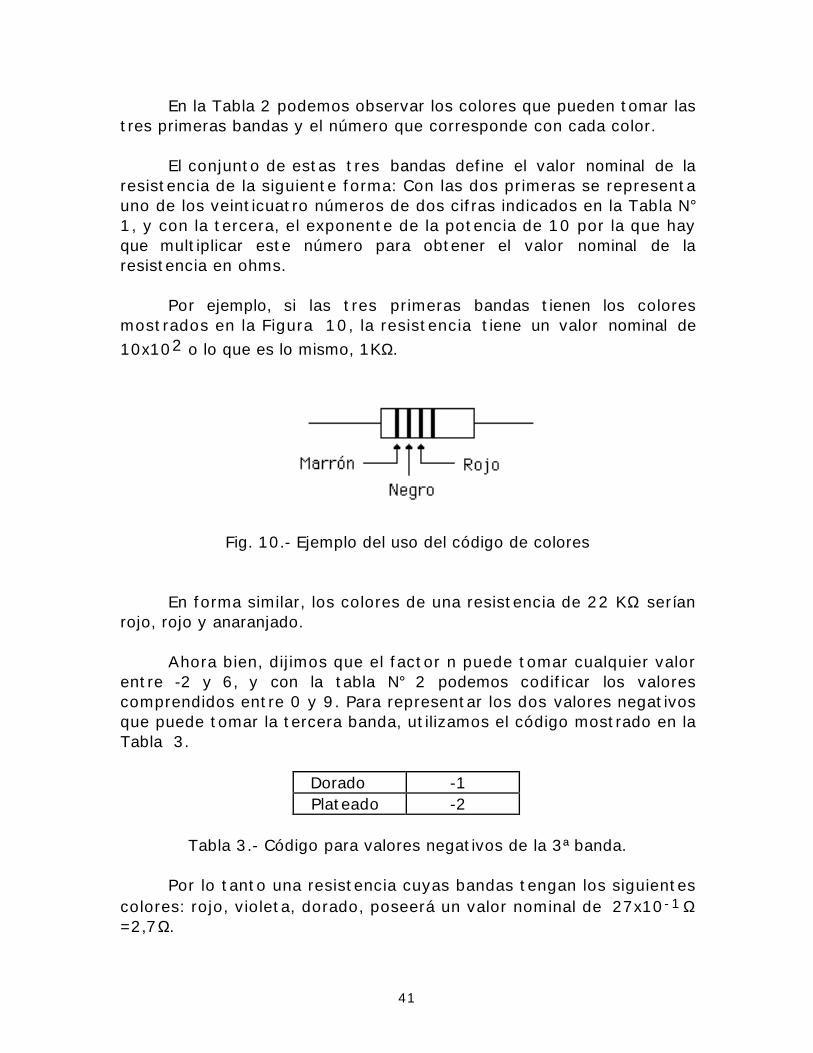
En la Tabla 2 podemos observar los colores que pueden tomar lastres primeras bandas y el número que corresponde con cada color.
El conjunto de estas tres bandas define el valor nominal de laresistencia de la siguiente forma: Con las dos primeras se representauno de los veinticuatro números de dos cifras indicados en la Tabla N°1, y con la tercera, el exponente de la potencia de 10 por la que hayque multiplicar este número para obtener el valor nominal de laresistencia en ohms.
Por ejemplo, si las tres primeras bandas tienen los coloresmostrados en la Figura 10, la resistencia tiene un valor nominal de10x102 o lo que es lo mismo, 1KΩ.
Fig. 10.- Ejemplo del uso del código de colores
En forma similar, los colores de una resistencia de 22 KΩ seríanrojo, rojo y anaranjado.
Ahora bien, dijimos que el factor n puede tomar cualquier valorentre -2 y 6, y con la tabla N° 2 podemos codificar los valorescomprendidos entre 0 y 9. Para representar los dos valores negativosque puede tomar la tercera banda, utilizamos el código mostrado en laTabla 3.
Dorado -1 Plateado -2
Tabla 3.- Código para valores negativos de la 3ª banda.
Por lo tanto una resistencia cuyas bandas tengan los siguientescolores: rojo, violeta, dorado, poseerá un valor nominal de 27x10- 1 Ω=2,7Ω.
42
4.4.2.2.- Tolerancia.
Al fabricar las resistencias en una línea de producción no esposible conseguir que todas ellas tengan exactamente el mismo valor.Debido a esto el fabricante indica por una parte cuál es el valor quedeberían tener dichas resistencias (valor nominal), y por otra, cuál esel rango de variación alrededor de este valor nominal dentro del cualpuede encontrarse el verdadero valor de una resistencia en particular.Este rango de variación se denomina tolerancia y generalmente seespecifica como un porcentaje del valor nominal.
Así, si un fabricante indica que una resistencia tiene un valor de100Ω con un 5% de tolerancia, el verdadero valor de dicha resistenciaestá comprendido entre 95Ω y 105Ω.
Por lo general, las resistencias de uso común en los circuitoselectrónicos (radios, amplificadores, etc.) se fabrican con unatolerancia de 20%, 10% ó 5%. Hay resistencias de semi-precisión quetienen una tolerancia de 1%, y resistencias de precisión (o resistenciaspatrón) cuya tolerancia es de 0,001% o menor.
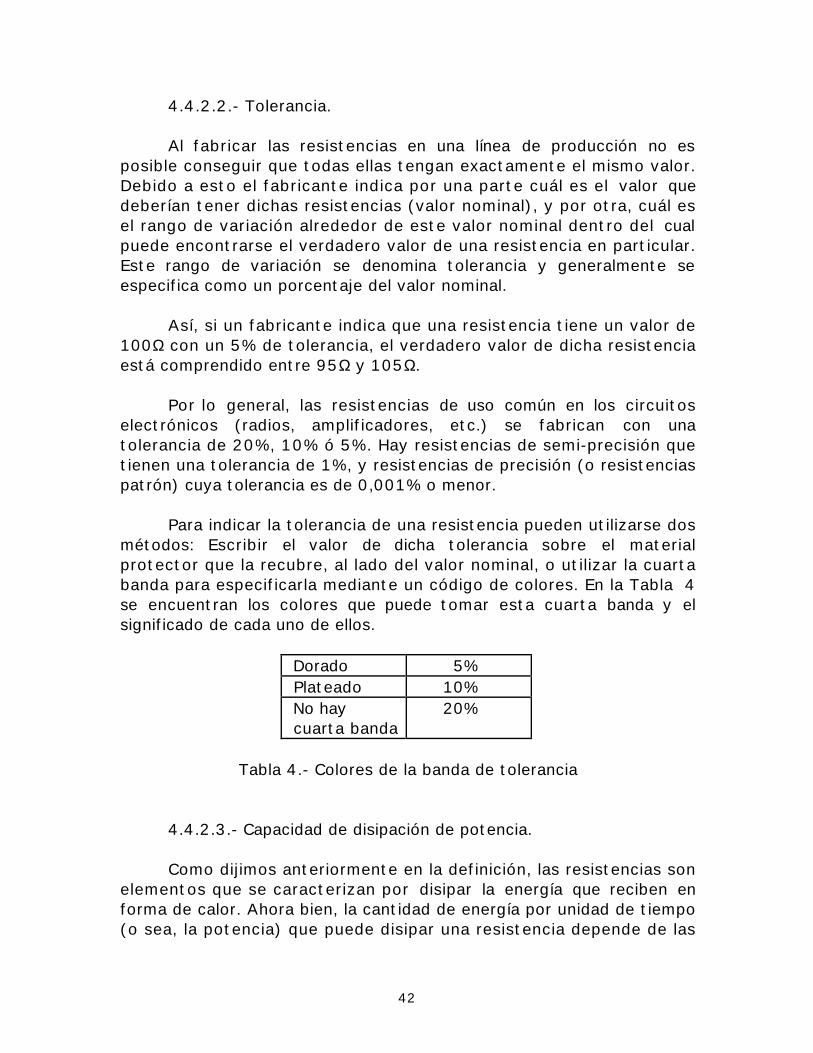
Para indicar la tolerancia de una resistencia pueden utilizarse dosmétodos: Escribir el valor de dicha tolerancia sobre el materialprotector que la recubre, al lado del valor nominal, o utilizar la cuartabanda para especificarla mediante un código de colores. En la Tabla 4se encuentran los colores que puede tomar esta cuarta banda y elsignificado de cada uno de ellos.
Dorado 5% Plateado 10% No hay cuarta banda
20%
Tabla 4.- Colores de la banda de tolerancia
4.4.2.3.- Capacidad de disipación de potencia.
Como dijimos anteriormente en la definición, las resistencias sonelementos que se caracterizan por disipar la energía que reciben enforma de calor. Ahora bien, la cantidad de energía por unidad de tiempo(o sea, la potencia) que puede disipar una resistencia depende de las
43
características del material resistivo, de las propiedades térmicas delmaterial aislante que la recubre, de su tamaño físico y de latemperatura ambiente. Si la potencia suministrada a una resistencia esmayor que la que ésta puede disipar, dicha resistencia se quema y sedestruye completamente. Por lo tanto, es necesario que el fabricanteespecifique cuál es la potencia máxima permisible, o sea, la capacidadde disipación de cada resistencia.
Por lo general, las resistencias utilizadas en circuitoselectrónicos tienen capacidades de disipación de 1/8W, 1/4W, 1/2W y2W. En estas resistencias la capacidad de disipación no está indicadasobre ellas, sino que está dada por su tamaño.
Las resistencias utilizadas en circuitos donde el nivel de potenciaes mucho mayor, tienen capacidades de disipación de por ejemplo 10W,25W, 100W, 225W o mayores. Hay resistencias que pueden disiparvarios KW de potencia.
4.4.2.4.- Temperatura de operación.
Como dijimos en el punto anterior, la potencia que puede disiparuna resistencia depende de la temperatura ambiente.
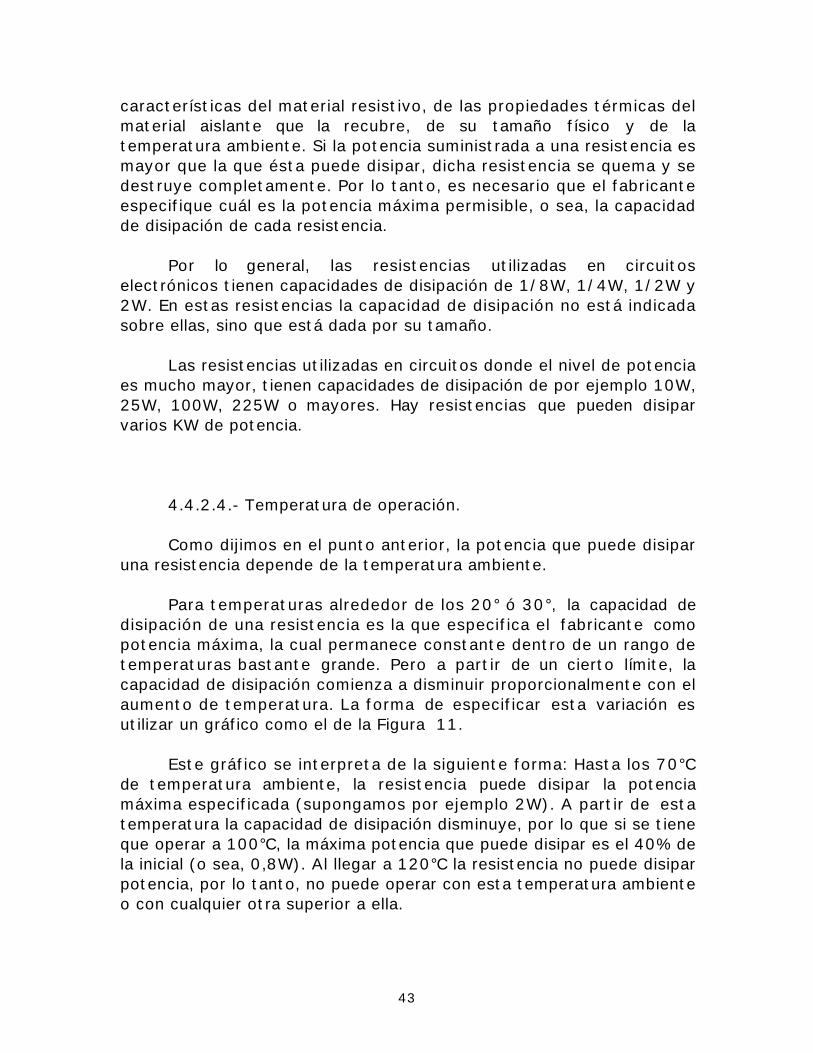
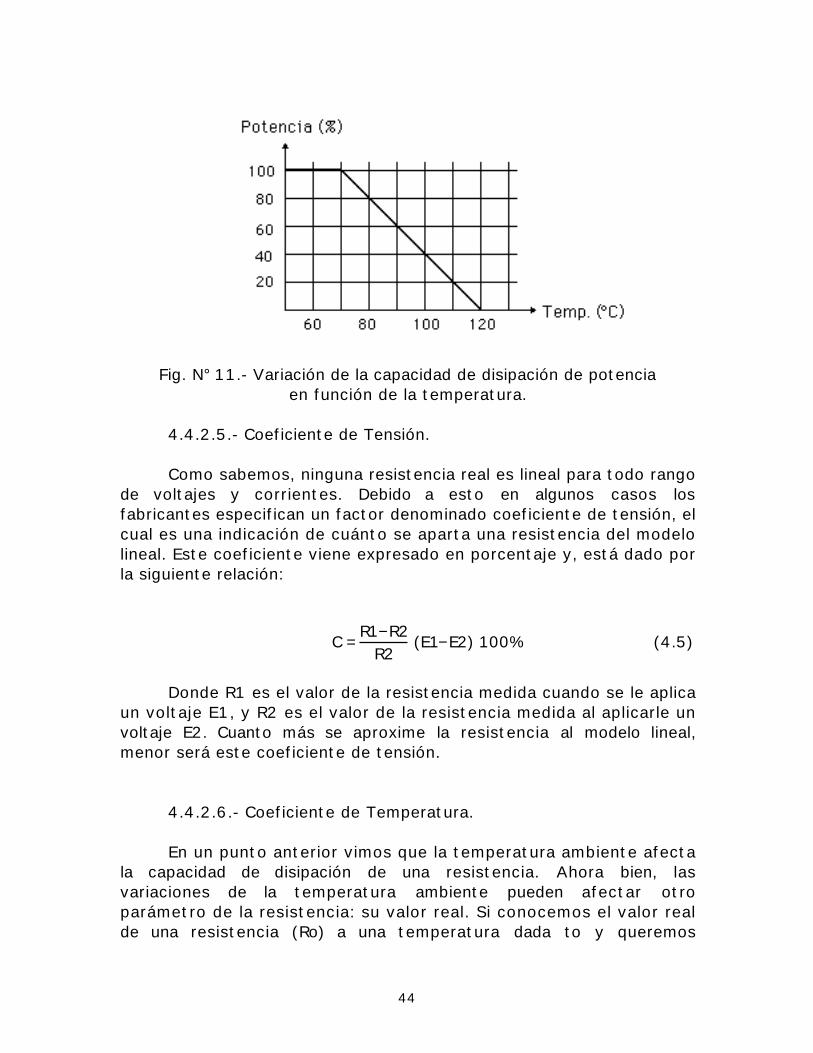
Para temperaturas alrededor de los 20° ó 30°, la capacidad dedisipación de una resistencia es la que especifica el fabricante comopotencia máxima, la cual permanece constante dentro de un rango detemperaturas bastante grande. Pero a partir de un cierto límite, lacapacidad de disipación comienza a disminuir proporcionalmente con elaumento de temperatura. La forma de especificar esta variación esutilizar un gráfico como el de la Figura 11.
Este gráfico se interpreta de la siguiente forma: Hasta los 70°Cde temperatura ambiente, la resistencia puede disipar la potenciamáxima especificada (supongamos por ejemplo 2W). A partir de estatemperatura la capacidad de disipación disminuye, por lo que si se tieneque operar a 100°C, la máxima potencia que puede disipar es el 40% dela inicial (o sea, 0,8W). Al llegar a 120°C la resistencia no puede disiparpotencia, por lo tanto, no puede operar con esta temperatura ambienteo con cualquier otra superior a ella.
44
Fig. N° 11.- Variación de la capacidad de disipación de potenciaen función de la temperatura.
4.4.2.5.- Coeficiente de Tensión.
Como sabemos, ninguna resistencia real es lineal para todo rangode voltajes y corrientes. Debido a esto en algunos casos losfabricantes especifican un factor denominado coeficiente de tensión, elcual es una indicación de cuánto se aparta una resistencia del modelolineal. Este coeficiente viene expresado en porcentaje y, está dado porla siguiente relación:
C =
R1−R2R2
(E1−E2) 100% (4.5)
Donde R1 es el valor de la resistencia medida cuando se le aplicaun voltaje E1, y R2 es el valor de la resistencia medida al aplicarle unvoltaje E2. Cuanto más se aproxime la resistencia al modelo lineal,menor será este coeficiente de tensión.
4.4.2.6.- Coeficiente de Temperatura.
En un punto anterior vimos que la temperatura ambiente afectala capacidad de disipación de una resistencia. Ahora bien, lasvariaciones de la temperatura ambiente pueden afectar otroparámetro de la resistencia: su valor real. Si conocemos el valor realde una resistencia (Ro) a una temperatura dada to y queremos
45
averiguar el valor real (R1) a una temperatura t1, podemos aplicar lasiguiente relación:
R1= Ro 1+ a (t − to)[ ] (4.6)
donde "a" es el coeficiente de temperatura especificado por elfabricante, el cual viene expresado en unidades de 1/°C, 1/°K ó 1/°F.
Por lo general, este factor es lo suficientemente pequeño paraque no sea necesario tomarlo en cuenta en circuitos que no requieranmucha exactitud.
4.4.2.7.- Estabilidad.
Las resistencias reales no son invariables con el tiempo. Su valorpuede cambiar aún en condiciones normales de operación, por lo tantoel fabricante puede especificar cual es el porcentaje de variación porunidad de tiempo bajo dichas condiciones normales de operación.
4.4.2.8.- Frecuencia de operación.
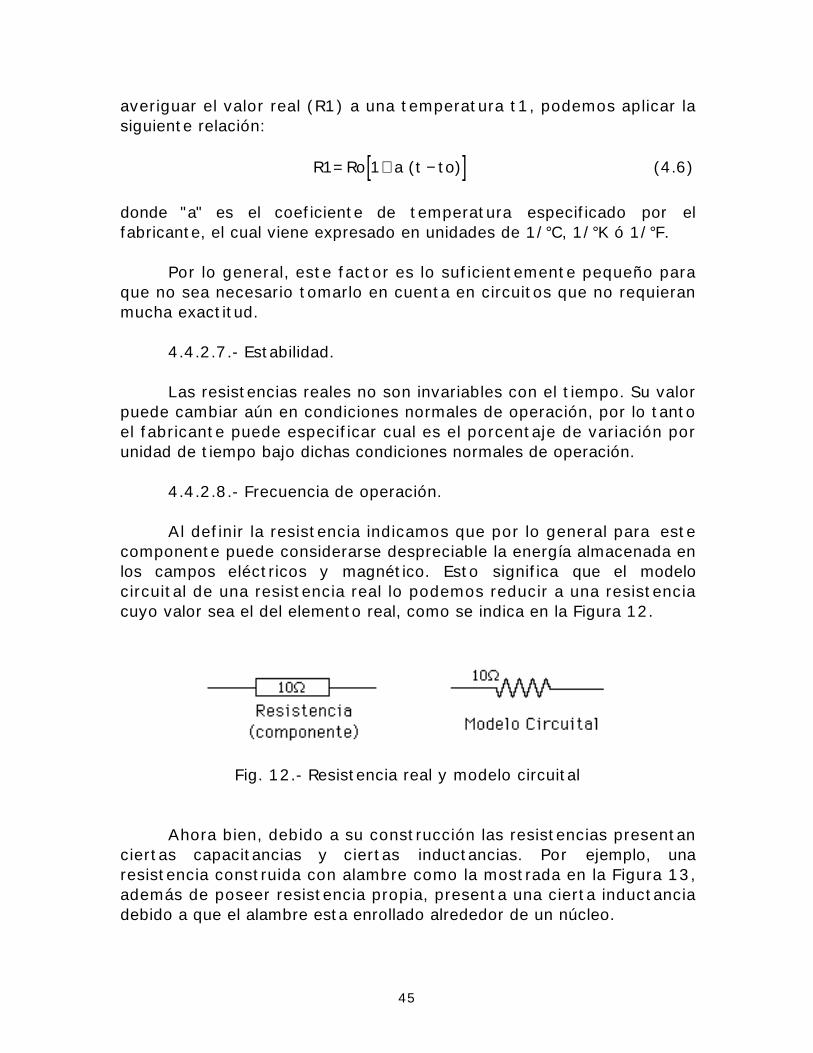
Al definir la resistencia indicamos que por lo general para estecomponente puede considerarse despreciable la energía almacenada enlos campos eléctricos y magnético. Esto significa que el modelocircuital de una resistencia real lo podemos reducir a una resistenciacuyo valor sea el del elemento real, como se indica en la Figura 12.
Fig. 12.- Resistencia real y modelo circuital
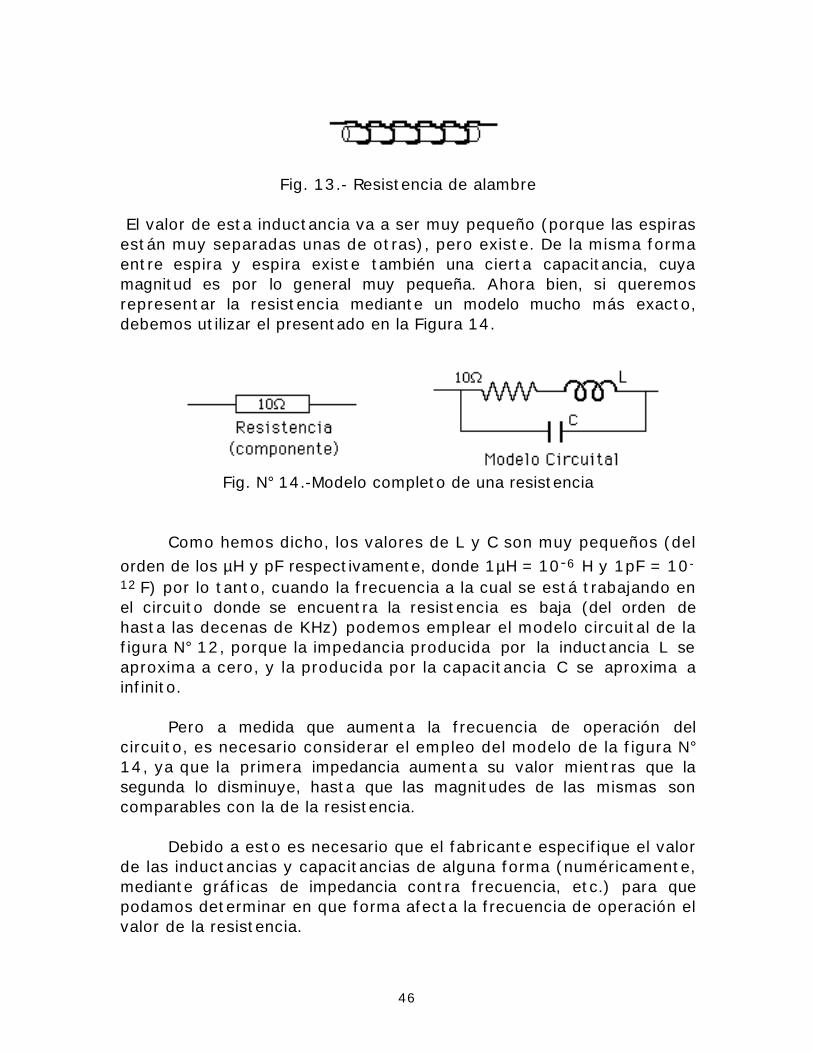
Ahora bien, debido a su construcción las resistencias presentanciertas capacitancias y ciertas inductancias. Por ejemplo, unaresistencia construida con alambre como la mostrada en la Figura 13,además de poseer resistencia propia, presenta una cierta inductanciadebido a que el alambre esta enrollado alrededor de un núcleo.
46
Fig. 13.- Resistencia de alambre
El valor de esta inductancia va a ser muy pequeño (porque las espirasestán muy separadas unas de otras), pero existe. De la misma formaentre espira y espira existe también una cierta capacitancia, cuyamagnitud es por lo general muy pequeña. Ahora bien, si queremosrepresentar la resistencia mediante un modelo mucho más exacto,debemos utilizar el presentado en la Figura 14.
Fig. N° 14.-Modelo completo de una resistencia
Como hemos dicho, los valores de L y C son muy pequeños (delorden de los µH y pF respectivamente, donde 1µH = 10-6 H y 1pF = 10-
12 F) por lo tanto, cuando la frecuencia a la cual se está trabajando enel circuito donde se encuentra la resistencia es baja (del orden dehasta las decenas de KHz) podemos emplear el modelo circuital de lafigura N° 12, porque la impedancia producida por la inductancia L seaproxima a cero, y la producida por la capacitancia C se aproxima ainfinito.
Pero a medida que aumenta la frecuencia de operación delcircuito, es necesario considerar el empleo del modelo de la figura N°14, ya que la primera impedancia aumenta su valor mientras que lasegunda lo disminuye, hasta que las magnitudes de las mismas soncomparables con la de la resistencia.
Debido a esto es necesario que el fabricante especifique el valorde las inductancias y capacitancias de alguna forma (numéricamente,mediante gráficas de impedancia contra frecuencia, etc.) para quepodamos determinar en que forma afecta la frecuencia de operación elvalor de la resistencia.
47
4.4.2.9.- Vida de almacenamiento.
Como vimos en el punto 4.2.2.7, las resistencias varían con eltiempo bajo condiciones normales de operación. Ahora bien, estoselementos pueden sufrir variaciones a lo largo del tiempo, aún cuandono se encuentren operando en un circuito, sino que simplemente esténalmacenadas. El fabricante especifica un porcentaje de variación poraño de almacenamiento.
4.4.2.10.- Característica de humedad.
Generalmente, las resistencias tienen un material de aislamientoque las protegen de la humedad. Para indicar su resistencia frente aeste agente físico el fabricante les asigna los símbolos H1, H2 ó H3según si han resistido las pruebas de 84, 14 ó 7 días de exposicióncontinua a la humedad.
4.4.3.- Clasificación.
Esta clasificación se realiza de acuerdo a los elementos utilizadosen la fabricación de las resistencias.
4.4.3.1.- Resistencias de Carbón.
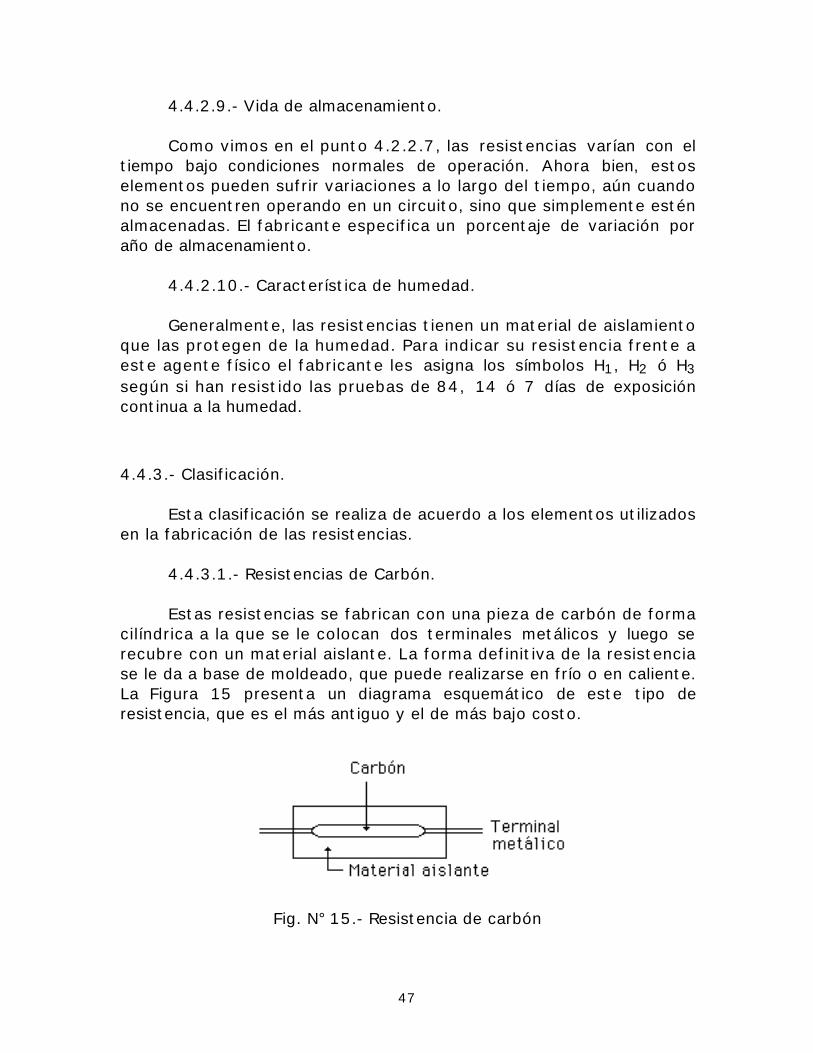
Estas resistencias se fabrican con una pieza de carbón de formacilíndrica a la que se le colocan dos terminales metálicos y luego serecubre con un material aislante. La forma definitiva de la resistenciase le da a base de moldeado, que puede realizarse en frío o en caliente.La Figura 15 presenta un diagrama esquemático de este tipo deresistencia, que es el más antiguo y el de más bajo costo.
Fig. N° 15.- Resistencia de carbón
48
4.4.3.2.- Resistencias de Capa Delgada.
Se fabrican depositando una fina capa de material resistivo (quepuede ser carbón, metal o una aleación) sobre un cilindro de cerámica yse recubren con un material protector. El espesor de la capadepositada puede estar comprendido entre 0,05 y 2,54 x 10-5 mm, porlo que se necesitan una serie de técnicas especiales para poder llevar acabo esta deposición.
Al realizar este proceso se obtienen resistencias cuyo orden demagnitud alcanza hasta los cientos de ohmios. Para poder obtenerresistencias de mayor valor se realiza un corte en espiral a lo largo delcilindro utilizando una punta de diamante. Si la longitud de este corteestá bien controlada, pueden fabricarse resistencias cuyo margen detolerancia sea muy bajo. La Figura 16 presenta un diagramaesquemático de este tipo de resistencias.
Fig. 16.- Resistencia de capa delgada
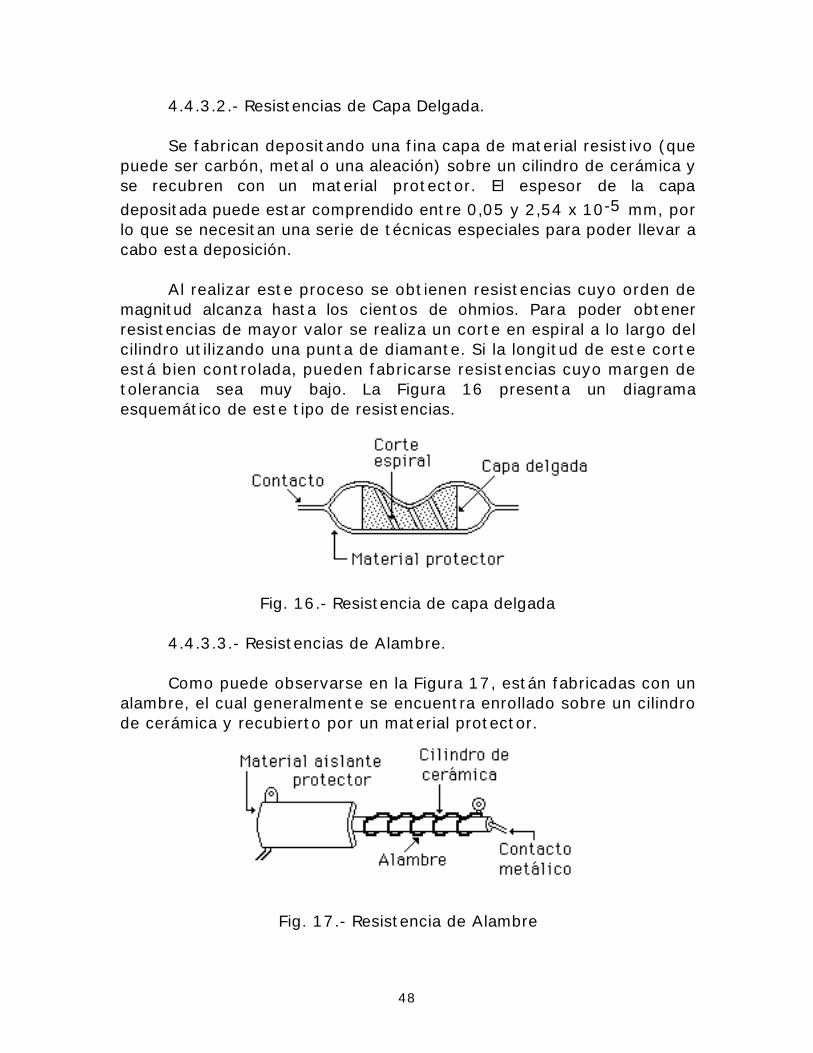
4.4.3.3.- Resistencias de Alambre.
Como puede observarse en la Figura 17, están fabricadas con unalambre, el cual generalmente se encuentra enrollado sobre un cilindrode cerámica y recubierto por un material protector.
Fig. 17.- Resistencia de Alambre
49
Generalmente, el valor de estas resistencias presenta granexactitud y su capacidad de disipación de potencia es mayor que la delas resistencias de carbón, pero su tamaño físico es también mayor, locual en algunos casos constituye una desventaja.
4.4.3.3.- Resistencias de Capa gruesa.
El proceso de fabricación de estas resistencias es similar al delas de capa delgada, con la diferencia de que el espesor de la capa eneste caso es mayor de 2,54 x 10-5 mm. Tienen varias ventajas sobrelas anteriores, ya que son más resistentes tanto desde el punto devista mecánico como químico, debido a lo cual se puede reducir elespesor del material protector que las debe recubrir. Ademáspresentan gran estabilidad, gran capacidad de disipación y su costo escomparable al de las resistencias de carbón.
Existen otros tipos de resistencias que sólo vamos a enumeraren este capítulo. Entre ellas se encuentran las de metal-vidrio, las decaracterística curva, las de atmósfera gaseosa, los discos metálicos yde carbón para los cables coaxiales, las franjas resistivas para lasguías de onda, etc.
4.5 CONDENSADORES.
4.5.1.- Definición.
Un condensador es un componente circuital cuya principalcaracterística es la de almacenar en el campo eléctrico existente en él,la energía que recibe del circuito donde está conectado.
En este elemento puede considerarse despreciable la energíaalmacenada en el campo magnético, y por lo general la energía disipadaen forma de calor.
Básicamente un condensador consta de dos placas conductorasextensas (electrodos) entre las cuales se encuentra un materialdieléctrico, como podemos observar en la Figura 18.
Al aplicar una diferencia de potencial entre las dos placas, secrea un campo eléctrico entre ellas.
50
Fig. N° 18.- Estructura de un Condensador
Como veremos más adelante, podemos clasificar loscondensadores según el tipo de material dieléctrico utilizado en suconstrucción.
4.5.2.- Especificaciones.
4.5.2.1.- Valor nominal.
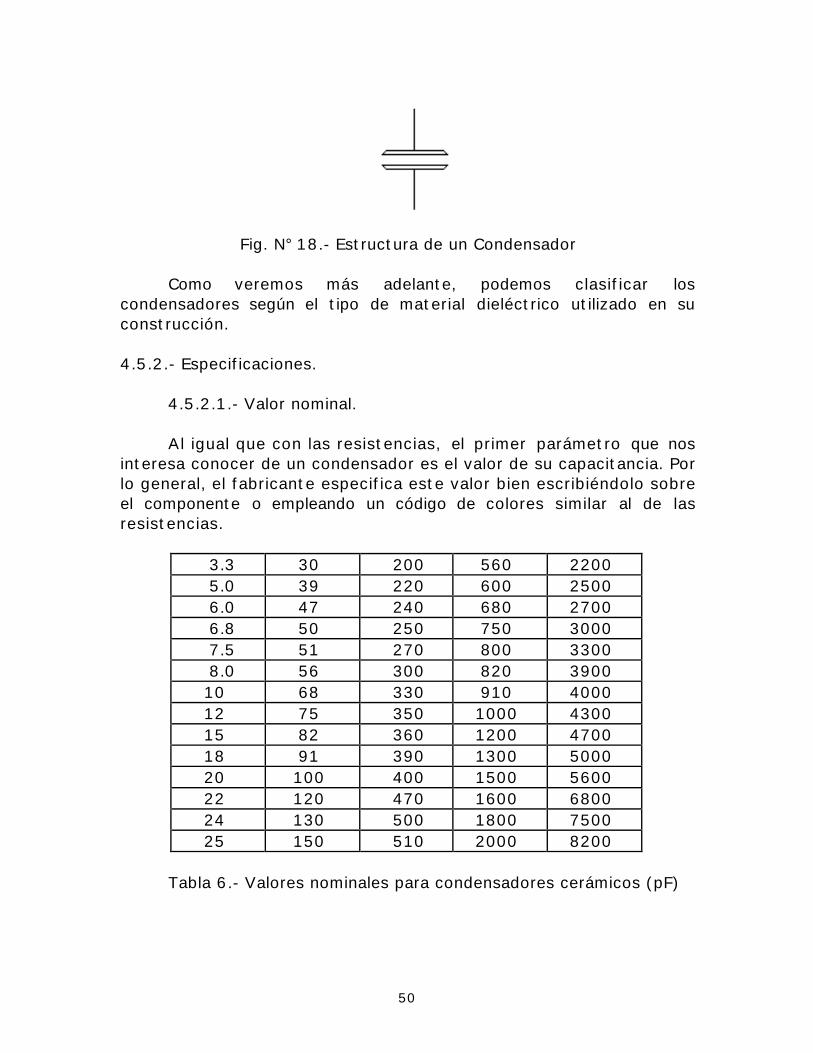
Al igual que con las resistencias, el primer parámetro que nosinteresa conocer de un condensador es el valor de su capacitancia. Porlo general, el fabricante especifica este valor bien escribiéndolo sobreel componente o empleando un código de colores similar al de lasresistencias.
3.3 30 200 560 2200 5.0 39 220 600 2500 6.0 47 240 680 2700 6.8 50 250 750 3000 7.5 51 270 800 3300 8.0 56 300 820 3900 10 68 330 910 4000 12 75 350 1000 4300 15 82 360 1200 4700 18 91 390 1300 5000 20 100 400 1500 5600 22 120 470 1600 6800 24 130 500 1800 7500 25 150 510 2000 8200
Tabla 6.- Valores nominales para condensadores cerámicos (pF)
51
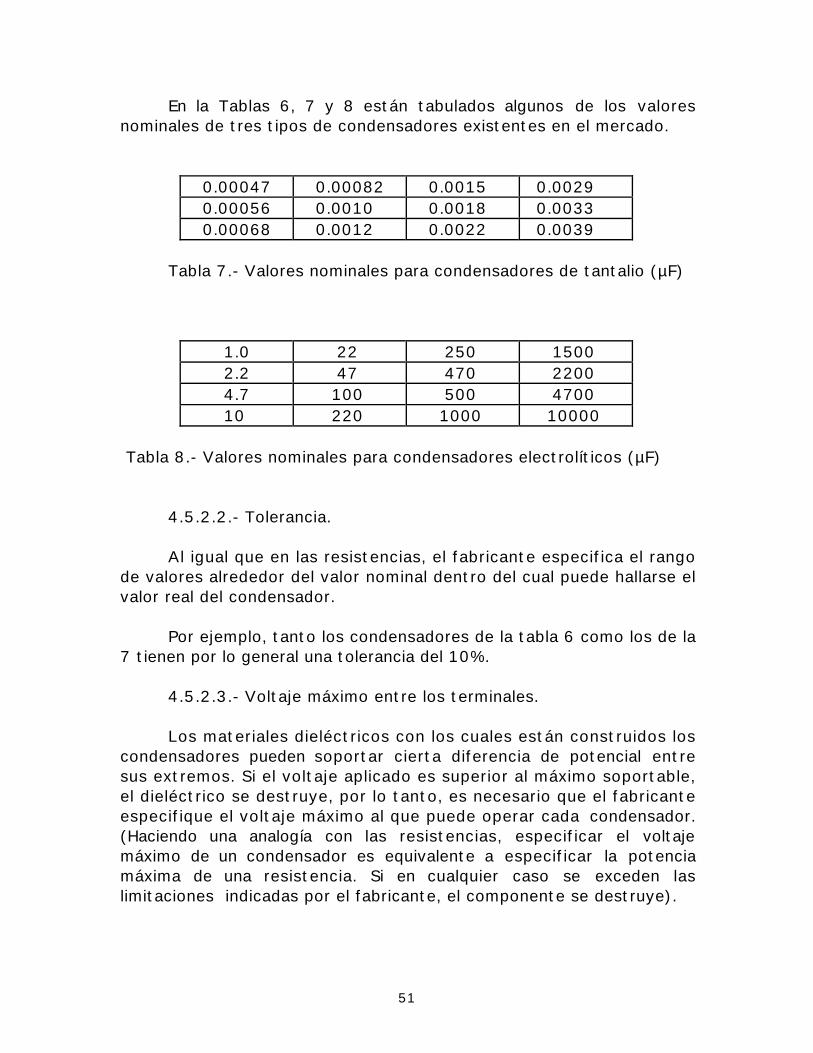
En la Tablas 6, 7 y 8 están tabulados algunos de los valoresnominales de tres tipos de condensadores existentes en el mercado.
0.00047 0.00082 0.0015 0.0029 0.00056 0.0010 0.0018 0.0033 0.00068 0.0012 0.0022 0.0039
Tabla 7.- Valores nominales para condensadores de tantalio (µF)
1.0 22 250 1500 2.2 47 470 2200 4.7 100 500 4700 10 220 1000 10000
Tabla 8.- Valores nominales para condensadores electrolíticos (µF)
4.5.2.2.- Tolerancia.
Al igual que en las resistencias, el fabricante especifica el rangode valores alrededor del valor nominal dentro del cual puede hallarse elvalor real del condensador.
Por ejemplo, tanto los condensadores de la tabla 6 como los de la7 tienen por lo general una tolerancia del 10%.
4.5.2.3.- Voltaje máximo entre los terminales.
Los materiales dieléctricos con los cuales están construidos loscondensadores pueden soportar cierta diferencia de potencial entresus extremos. Si el voltaje aplicado es superior al máximo soportable,el dieléctrico se destruye, por lo tanto, es necesario que el fabricanteespecifique el voltaje máximo al que puede operar cada condensador.(Haciendo una analogía con las resistencias, especificar el voltajemáximo de un condensador es equivalente a especificar la potenciamáxima de una resistencia. Si en cualquier caso se exceden laslimitaciones indicadas por el fabricante, el componente se destruye).
52
4.5.2.4.- Resistencia asociada.
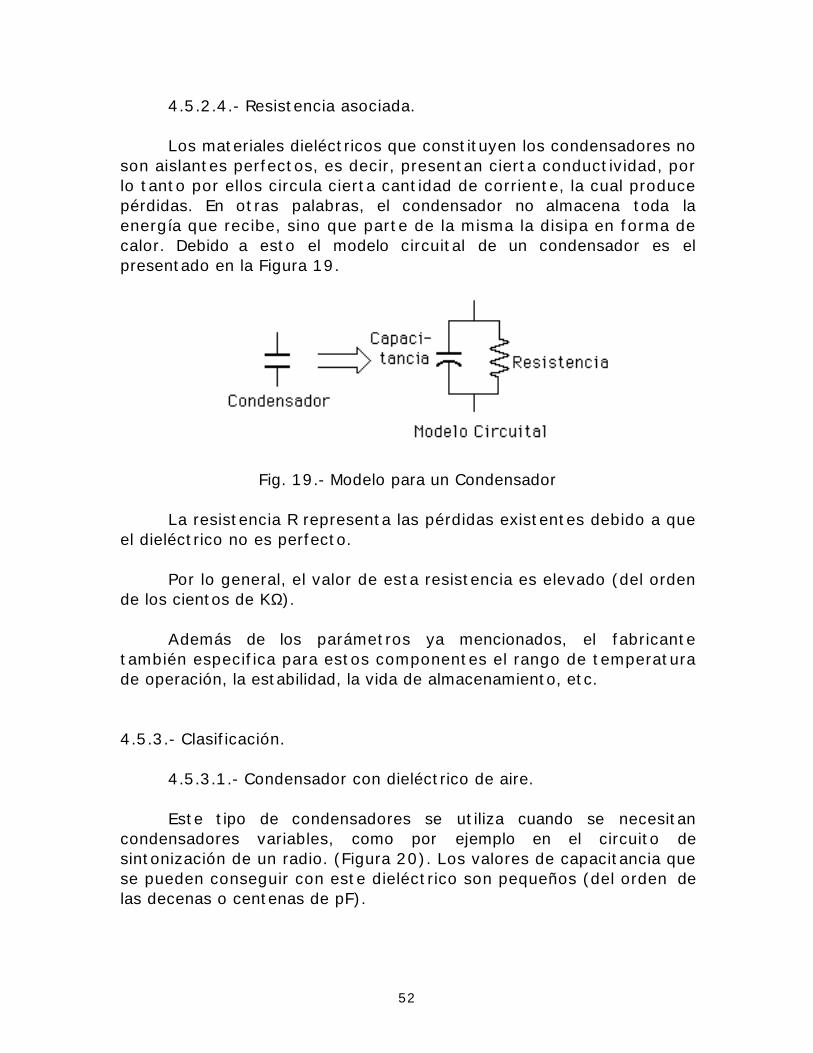
Los materiales dieléctricos que constituyen los condensadores noson aislantes perfectos, es decir, presentan cierta conductividad, porlo tanto por ellos circula cierta cantidad de corriente, la cual producepérdidas. En otras palabras, el condensador no almacena toda laenergía que recibe, sino que parte de la misma la disipa en forma decalor. Debido a esto el modelo circuital de un condensador es elpresentado en la Figura 19.
Fig. 19.- Modelo para un Condensador
La resistencia R representa las pérdidas existentes debido a queel dieléctrico no es perfecto.
Por lo general, el valor de esta resistencia es elevado (del ordende los cientos de KΩ).
Además de los parámetros ya mencionados, el fabricantetambién especifica para estos componentes el rango de temperaturade operación, la estabilidad, la vida de almacenamiento, etc.
4.5.3.- Clasificación.
4.5.3.1.- Condensador con dieléctrico de aire.
Este tipo de condensadores se utiliza cuando se necesitancondensadores variables, como por ejemplo en el circuito desintonización de un radio. (Figura 20). Los valores de capacitancia quese pueden conseguir con este dieléctrico son pequeños (del orden delas decenas o centenas de pF).
53
Fig. 20.- Capacitor variable con dieléctrico de aire
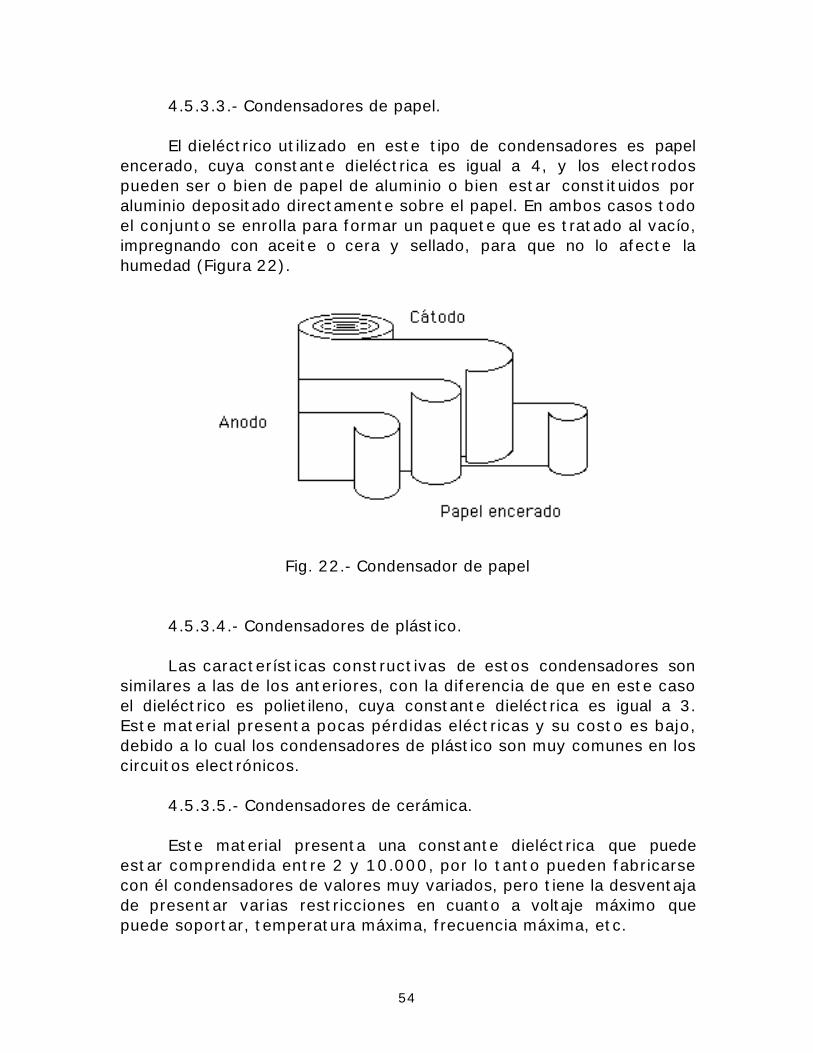
4.5.3.2.- Condensadores de mica.
La mica es un material que presenta bajas pérdidas, granestabilidad y una rigidez eléctrica elevada, lo cual la convierte en unelemento ideal para ser utilizado como dieléctrico de un condensador,pero tiene la desventaja de que es muy costosa, y por lo tanto su usoes muy limitado. Los condensadores de mica se emplean en circuitosresonantes donde se requiere un condensador estable y de bajaspérdidas. La constante dieléctrica de este material es 7,5. La Figura21 presenta la estructura de este tipo de condensadores.
Fig. 21.- Condensador de mica
También se fabrican condensadores con las mismascaracterísticas que los de mica, pero empleando cera o vidrio comomaterial dieléctrico. Las constantes dieléctricas de estos elementosson 3 y 7,6 respectivamente.
54
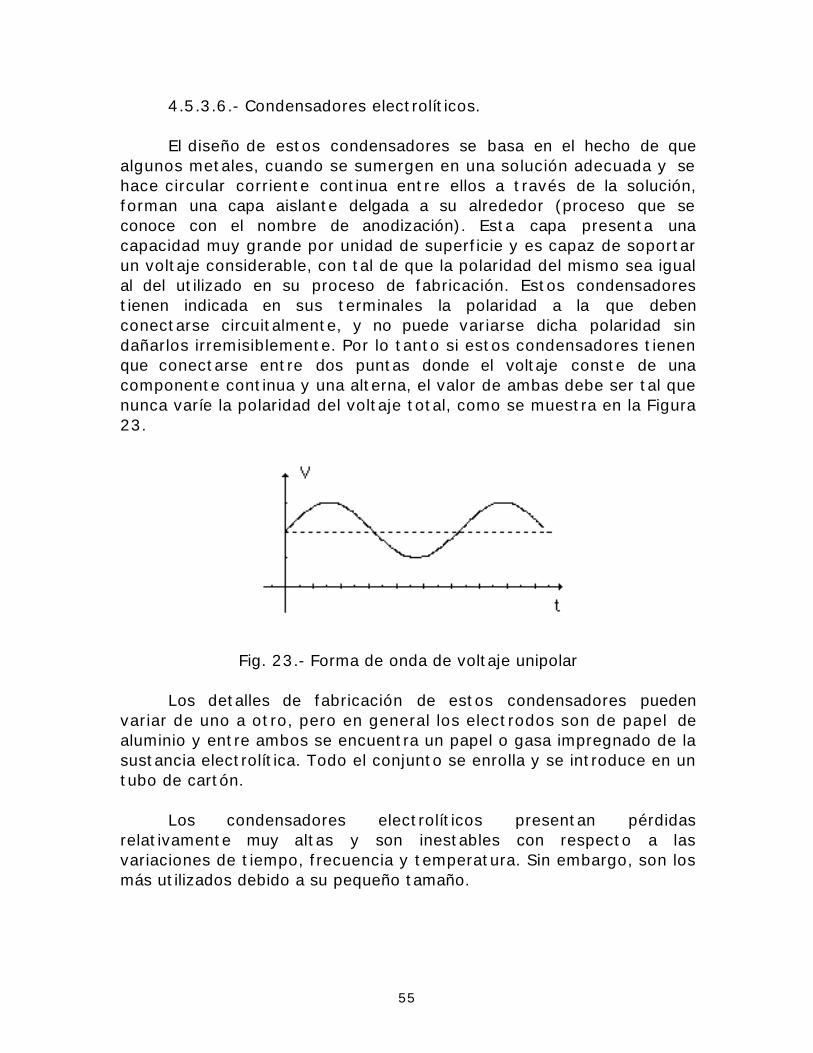
4.5.3.3.- Condensadores de papel.
El dieléctrico utilizado en este tipo de condensadores es papelencerado, cuya constante dieléctrica es igual a 4, y los electrodospueden ser o bien de papel de aluminio o bien estar constituidos poraluminio depositado directamente sobre el papel. En ambos casos todoel conjunto se enrolla para formar un paquete que es tratado al vacío,impregnando con aceite o cera y sellado, para que no lo afecte lahumedad (Figura 22).
Fig. 22.- Condensador de papel
4.5.3.4.- Condensadores de plástico.
Las características constructivas de estos condensadores sonsimilares a las de los anteriores, con la diferencia de que en este casoel dieléctrico es polietileno, cuya constante dieléctrica es igual a 3.Este material presenta pocas pérdidas eléctricas y su costo es bajo,debido a lo cual los condensadores de plástico son muy comunes en loscircuitos electrónicos.
4.5.3.5.- Condensadores de cerámica.
Este material presenta una constante dieléctrica que puedeestar comprendida entre 2 y 10.000, por lo tanto pueden fabricarsecon él condensadores de valores muy variados, pero tiene la desventajade presentar varias restricciones en cuanto a voltaje máximo quepuede soportar, temperatura máxima, frecuencia máxima, etc.
55
4.5.3.6.- Condensadores electrolíticos.
El diseño de estos condensadores se basa en el hecho de quealgunos metales, cuando se sumergen en una solución adecuada y sehace circular corriente continua entre ellos a través de la solución,forman una capa aislante delgada a su alrededor (proceso que seconoce con el nombre de anodización). Esta capa presenta unacapacidad muy grande por unidad de superficie y es capaz de soportarun voltaje considerable, con tal de que la polaridad del mismo sea igualal del utilizado en su proceso de fabricación. Estos condensadorestienen indicada en sus terminales la polaridad a la que debenconectarse circuitalmente, y no puede variarse dicha polaridad sindañarlos irremisiblemente. Por lo tanto si estos condensadores tienenque conectarse entre dos puntas donde el voltaje conste de unacomponente continua y una alterna, el valor de ambas debe ser tal quenunca varíe la polaridad del voltaje total, como se muestra en la Figura23.
Fig. 23.- Forma de onda de voltaje unipolar
Los detalles de fabricación de estos condensadores puedenvariar de uno a otro, pero en general los electrodos son de papel dealuminio y entre ambos se encuentra un papel o gasa impregnado de lasustancia electrolítica. Todo el conjunto se enrolla y se introduce en untubo de cartón.
Los condensadores electrolíticos presentan pérdidasrelativamente muy altas y son inestables con respecto a lasvariaciones de tiempo, frecuencia y temperatura. Sin embargo, son losmás utilizados debido a su pequeño tamaño.
56
4.6 BOBINAS O INDUCTORES.
4.6.1.- Definición.
Una bobina es un componente circuital cuya principalcaracterística es almacenar en el campo magnético existente en él, laenergía que recibe del circuito donde está conectado.
En este elemento hay que tomar en cuenta la energía disipada enforma de calor, pero por lo general la energía almacenada en el campoeléctrico puede considerarse despreciable.
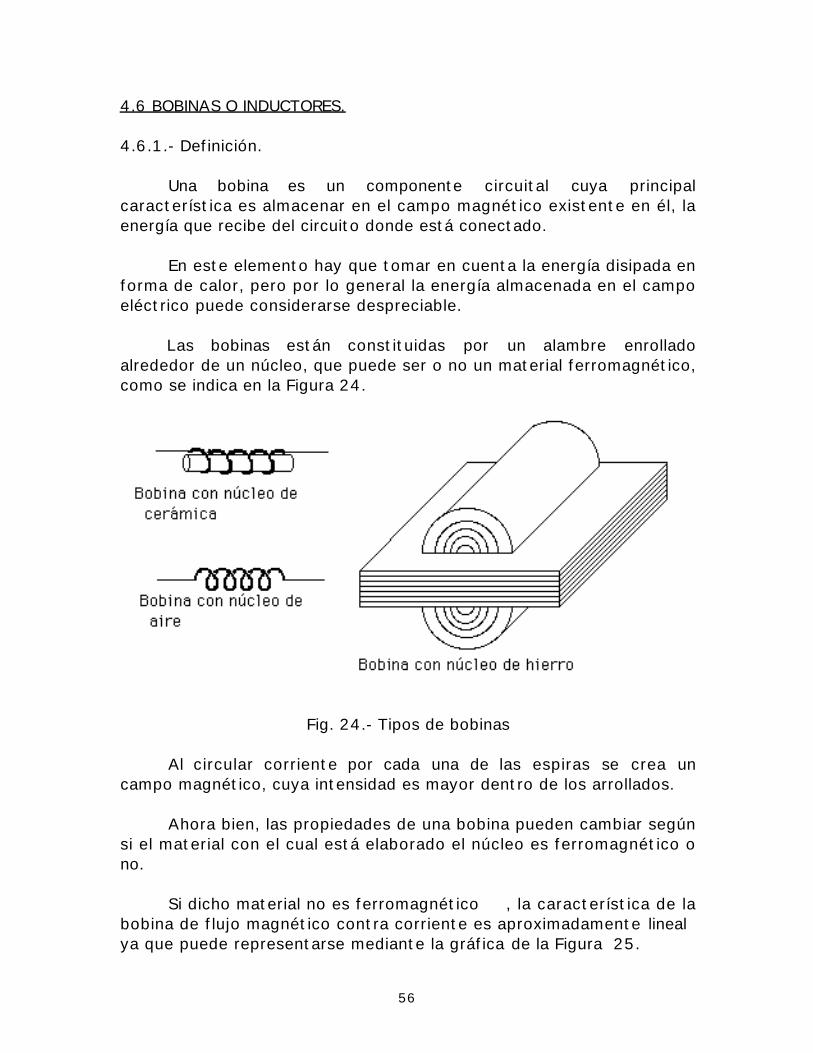
Las bobinas están constituidas por un alambre enrolladoalrededor de un núcleo, que puede ser o no un material ferromagnético,como se indica en la Figura 24.
Fig. 24.- Tipos de bobinas
Al circular corriente por cada una de las espiras se crea uncampo magnético, cuya intensidad es mayor dentro de los arrollados.
Ahora bien, las propiedades de una bobina pueden cambiar segúnsi el material con el cual está elaborado el núcleo es ferromagnético ono.
Si dicho material no es ferromagnético , la característica de labobina de flujo magnético contra corriente es aproximadamente linealya que puede representarse mediante la gráfica de la Figura 25.
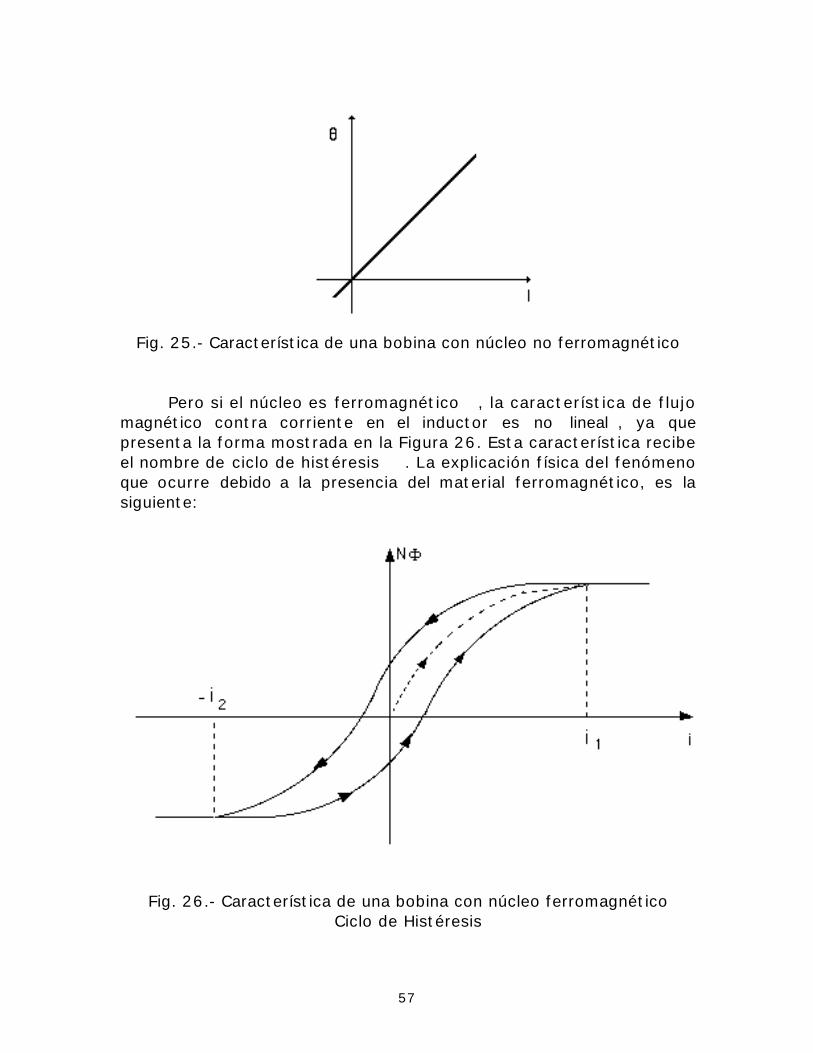
57
Fig. 25.- Característica de una bobina con núcleo no ferromagnético
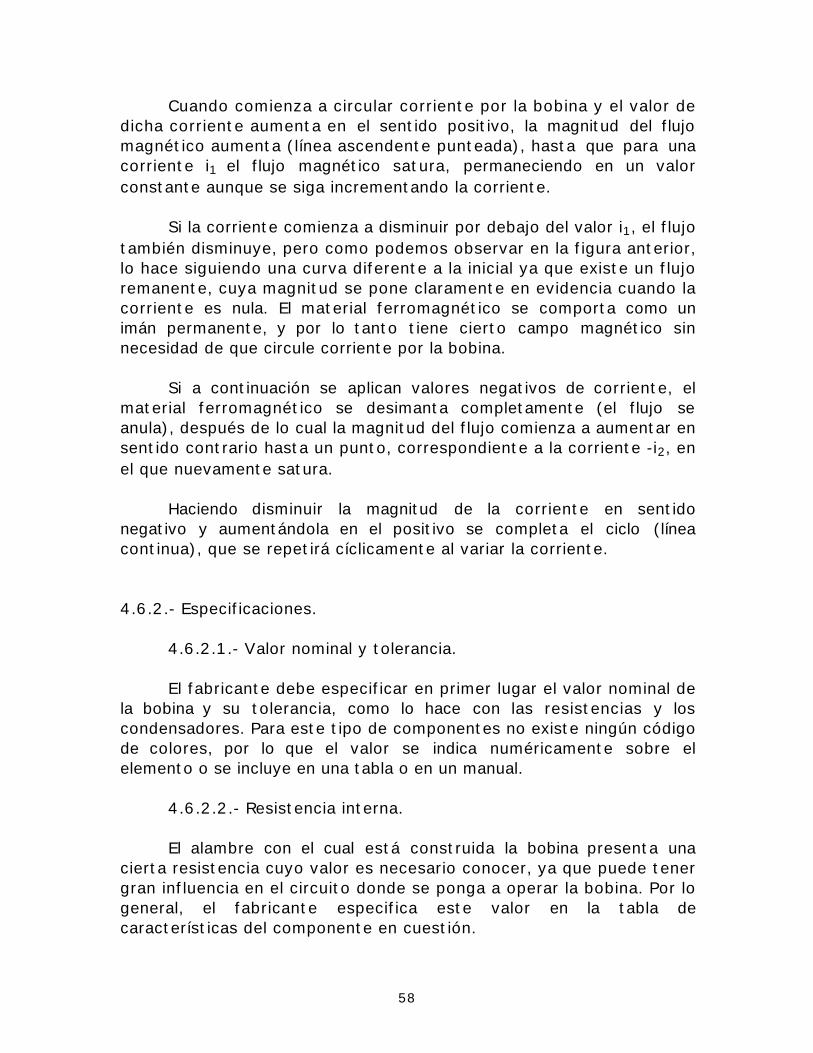
Pero si el núcleo es ferromagnético , la característica de flujomagnético contra corriente en el inductor es no lineal , ya quepresenta la forma mostrada en la Figura 26. Esta característica recibeel nombre de ciclo de histéresis . La explicación física del fenómenoque ocurre debido a la presencia del material ferromagnético, es lasiguiente:
Fig. 26.- Característica de una bobina con núcleo ferromagnéticoCiclo de Histéresis
58
Cuando comienza a circular corriente por la bobina y el valor dedicha corriente aumenta en el sentido positivo, la magnitud del flujomagnético aumenta (línea ascendente punteada), hasta que para unacorriente i1 el flujo magnético satura, permaneciendo en un valorconstante aunque se siga incrementando la corriente.
Si la corriente comienza a disminuir por debajo del valor i1, el flujotambién disminuye, pero como podemos observar en la figura anterior,lo hace siguiendo una curva diferente a la inicial ya que existe un flujoremanente, cuya magnitud se pone claramente en evidencia cuando lacorriente es nula. El material ferromagnético se comporta como unimán permanente, y por lo tanto tiene cierto campo magnético sinnecesidad de que circule corriente por la bobina.
Si a continuación se aplican valores negativos de corriente, elmaterial ferromagnético se desimanta completamente (el flujo seanula), después de lo cual la magnitud del flujo comienza a aumentar ensentido contrario hasta un punto, correspondiente a la corriente -i2, enel que nuevamente satura.
Haciendo disminuir la magnitud de la corriente en sentidonegativo y aumentándola en el positivo se completa el ciclo (líneacontinua), que se repetirá cíclicamente al variar la corriente.
4.6.2.- Especificaciones.
4.6.2.1.- Valor nominal y tolerancia.
El fabricante debe especificar en primer lugar el valor nominal dela bobina y su tolerancia, como lo hace con las resistencias y loscondensadores. Para este tipo de componentes no existe ningún códigode colores, por lo que el valor se indica numéricamente sobre elelemento o se incluye en una tabla o en un manual.
4.6.2.2.- Resistencia interna.
El alambre con el cual está construida la bobina presenta unacierta resistencia cuyo valor es necesario conocer, ya que puede tenergran influencia en el circuito donde se ponga a operar la bobina. Por logeneral, el fabricante especifica este valor en la tabla decaracterísticas del componente en cuestión.
59
4.6.2.3.- Corriente máxima.
Debido a la resistencia interna, la bobina disipa cierta cantidad depotencia en forma de calor. Ahora bien, como para toda resistencia,esta cantidad de potencia disipada tiene un máximo que es necesarioespecificar. Por lo general, para este tipo de componente no seespecifica directamente la potencia, sino que se indica la corrientemáxima (DC) que puede circular, la cual produce dicha disipaciónmáxima. Para las bobinas de núcleo ferromagnético, se especifica lacorriente para la cual el flujo magnético satura.
4.6.2.4.- Frecuencia de operación.
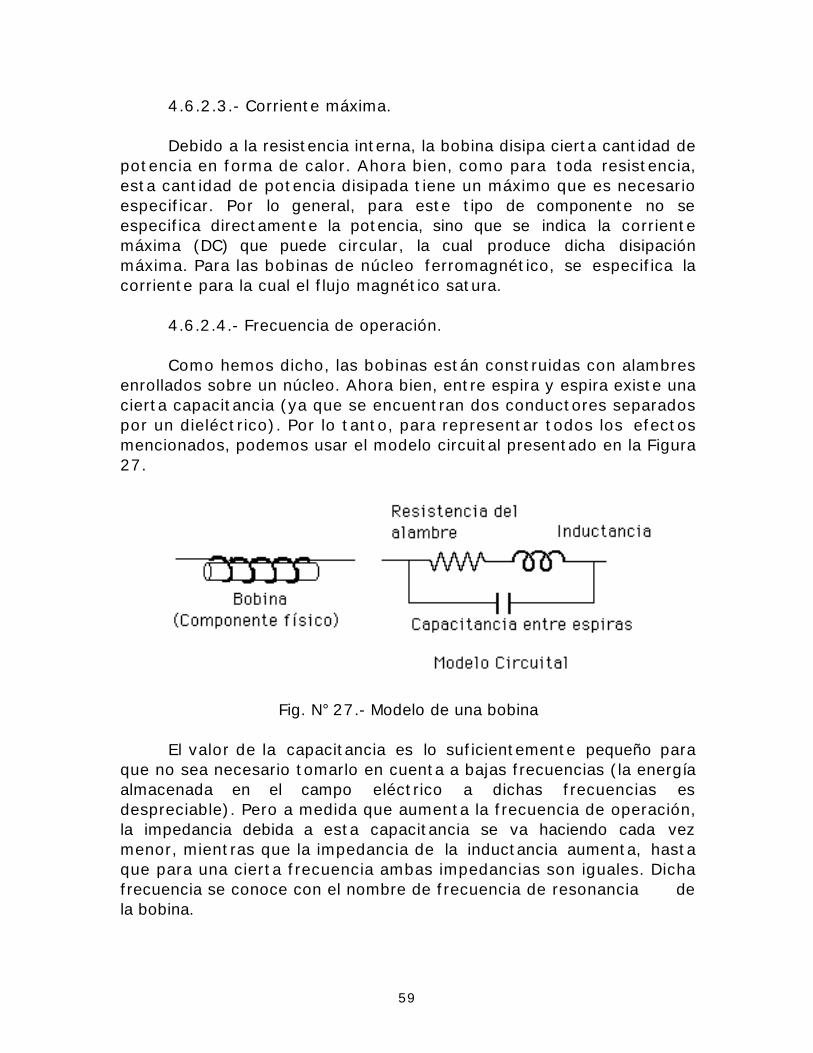
Como hemos dicho, las bobinas están construidas con alambresenrollados sobre un núcleo. Ahora bien, entre espira y espira existe unacierta capacitancia (ya que se encuentran dos conductores separadospor un dieléctrico). Por lo tanto, para representar todos los efectosmencionados, podemos usar el modelo circuital presentado en la Figura27.
Fig. N° 27.- Modelo de una bobina
El valor de la capacitancia es lo suficientemente pequeño paraque no sea necesario tomarlo en cuenta a bajas frecuencias (la energíaalmacenada en el campo eléctrico a dichas frecuencias esdespreciable). Pero a medida que aumenta la frecuencia de operación,la impedancia debida a esta capacitancia se va haciendo cada vezmenor, mientras que la impedancia de la inductancia aumenta, hastaque para una cierta frecuencia ambas impedancias son iguales. Dichafrecuencia se conoce con el nombre de frecuencia de resonancia dela bobina.
60
CAPITULO V
EL GALVANOMETRO DE D'ARSONVAL
5.1 INTRODUCCION.
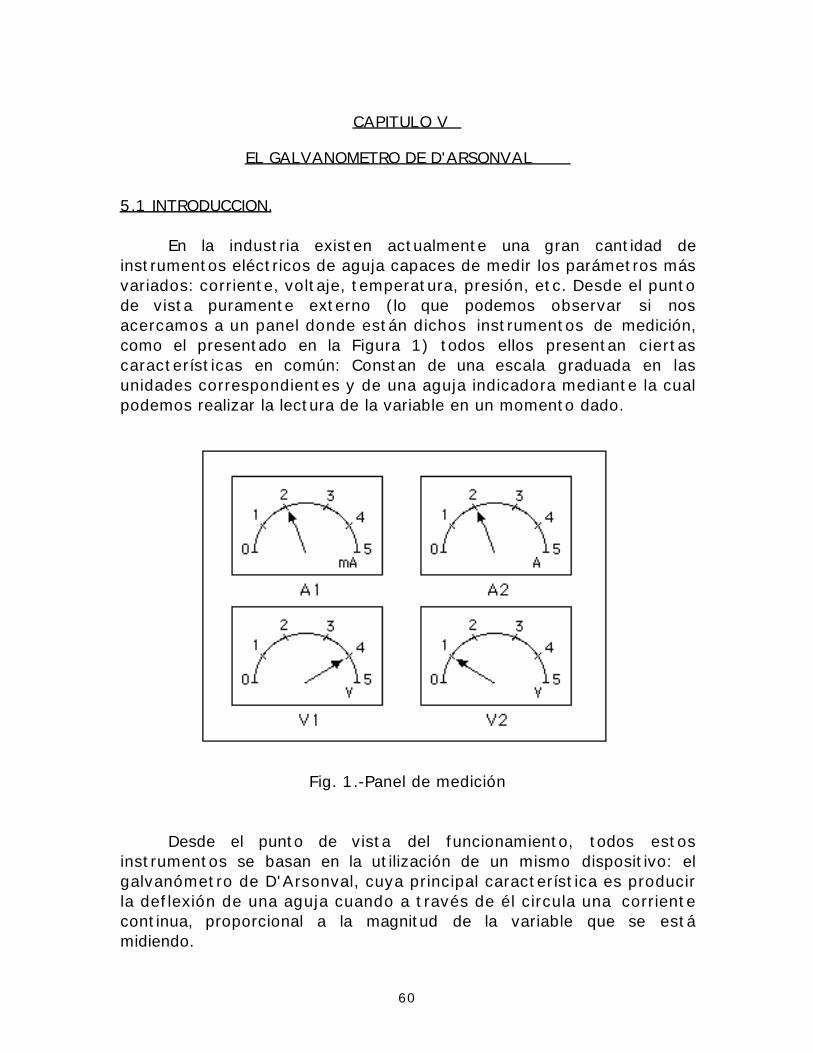
En la industria existen actualmente una gran cantidad deinstrumentos eléctricos de aguja capaces de medir los parámetros másvariados: corriente, voltaje, temperatura, presión, etc. Desde el puntode vista puramente externo (lo que podemos observar si nosacercamos a un panel donde están dichos instrumentos de medición,como el presentado en la Figura 1) todos ellos presentan ciertascaracterísticas en común: Constan de una escala graduada en lasunidades correspondientes y de una aguja indicadora mediante la cualpodemos realizar la lectura de la variable en un momento dado.
Fig. 1.-Panel de medición
Desde el punto de vista del funcionamiento, todos estosinstrumentos se basan en la utilización de un mismo dispositivo: elgalvanómetro de D'Arsonval, cuya principal característica es producirla deflexión de una aguja cuando a través de él circula una corrientecontinua, proporcional a la magnitud de la variable que se estámidiendo.
61
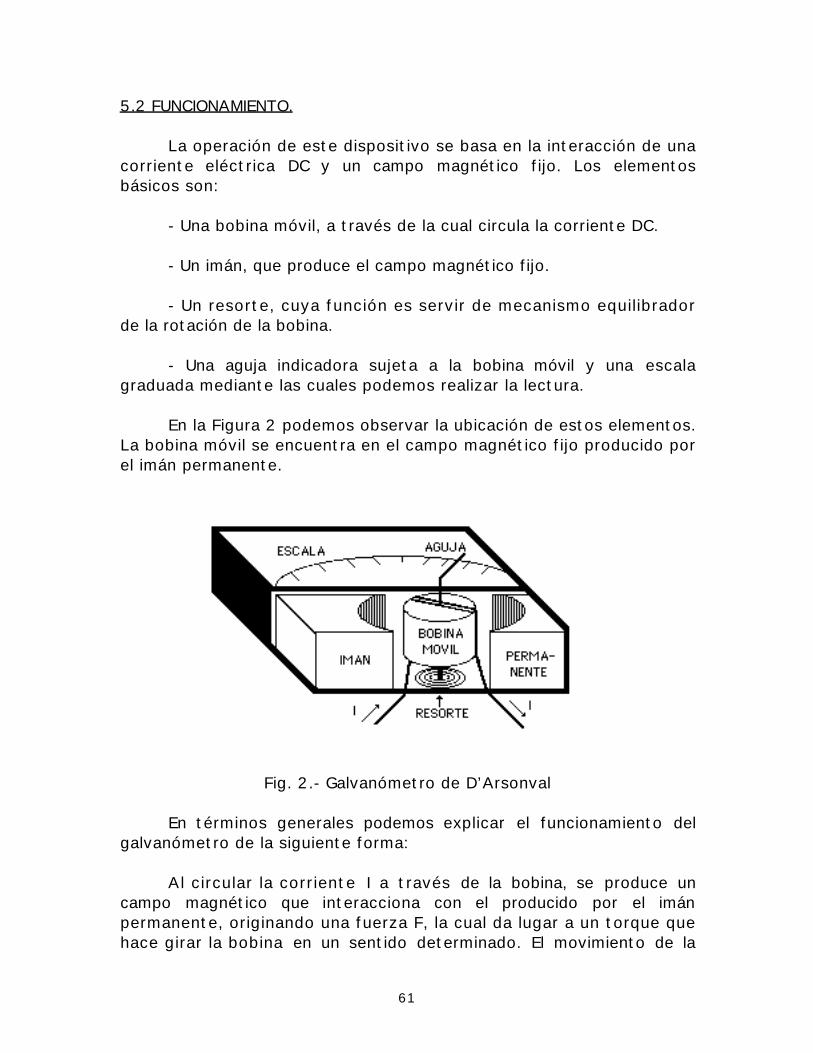
5.2 FUNCIONAMIENTO.
La operación de este dispositivo se basa en la interacción de unacorriente eléctrica DC y un campo magnético fijo. Los elementosbásicos son:
- Una bobina móvil, a través de la cual circula la corriente DC.
- Un imán, que produce el campo magnético fijo.
- Un resorte, cuya función es servir de mecanismo equilibradorde la rotación de la bobina.
- Una aguja indicadora sujeta a la bobina móvil y una escalagraduada mediante las cuales podemos realizar la lectura.
En la Figura 2 podemos observar la ubicación de estos elementos.La bobina móvil se encuentra en el campo magnético fijo producido porel imán permanente.
Fig. 2.- Galvanómetro de D’Arsonval
En términos generales podemos explicar el funcionamiento delgalvanómetro de la siguiente forma:
Al circular la corriente I a través de la bobina, se produce uncampo magnético que interacciona con el producido por el imánpermanente, originando una fuerza F, la cual da lugar a un torque quehace girar la bobina en un sentido determinado. El movimiento de la

62
bobina está compensado por el resorte. La constante de dicho resortedetermina el ángulo girado de la bobina para una corriente dada. Unavez definidas la magnitud del campo magnético B, la constante delresorte y la disposición más adecuada de los elementos, el ángulo quegira la bobina móvil (y por lo tanto la aguja indicadora) es proporcional ala corriente I que circula por el galvanómetro.
Vamos a analizar ahora el funcionamiento del galvanómetro másdetalladamente.
Supongamos que la bobina consta de una sola espira, a través dela cual está circulando una corriente I, como se indica en la Figura 3.
Fig. 3.- Espira de una bobina en el campo magnético del imánpermanente
El campo B es perpendicular a la normal de la superficie de laespira. En el lado a-b, para un diferencial de longitud dl1, la fuerzaproducida por la interacción de la corriente I con el campo magnético Bestá dada por la siguiente relación:
∂F 1 = I (∂l1× B ) (5.1)
La fuerza total en dicho lado es la integral de ∂F1, a lo largo de l1.Como B e I son constantes, y la dirección de B es perpendicular a la deI, obtenemos:
F 1 = I B l1 u F (5.2)
La dirección de F 1, o sea u F es perpendicular a la página, y susentido es hacia dentro de la misma. En el lado c-d se produce unafuerza F 2, de la misma magnitud que la anterior pero de sentido
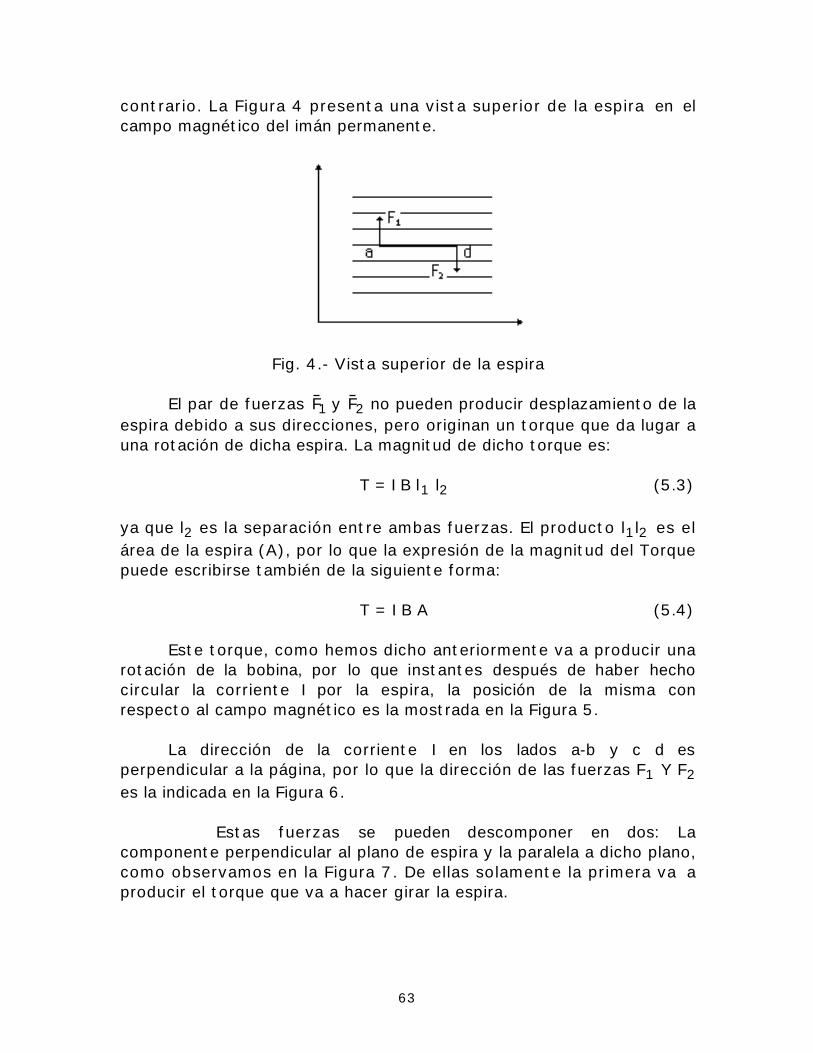
63
contrario. La Figura 4 presenta una vista superior de la espira en elcampo magnético del imán permanente.
Fig. 4.- Vista superior de la espira
El par de fuerzas F 1 y F 2 no pueden producir desplazamiento de laespira debido a sus direcciones, pero originan un torque que da lugar auna rotación de dicha espira. La magnitud de dicho torque es:
T = I B l1 l2 (5.3)
ya que l2 es la separación entre ambas fuerzas. El producto l1l2 es elárea de la espira (A), por lo que la expresión de la magnitud del Torquepuede escribirse también de la siguiente forma:
T = I B A (5.4)
Este torque, como hemos dicho anteriormente va a producir unarotación de la bobina, por lo que instantes después de haber hechocircular la corriente I por la espira, la posición de la misma conrespecto al campo magnético es la mostrada en la Figura 5.
La dirección de la corriente I en los lados a-b y c d esperpendicular a la página, por lo que la dirección de las fuerzas F1 Y F2es la indicada en la Figura 6.
Estas fuerzas se pueden descomponer en dos: Lacomponente perpendicular al plano de espira y la paralela a dicho plano,como observamos en la Figura 7. De ellas solamente la primera va aproducir el torque que va a hacer girar la espira.
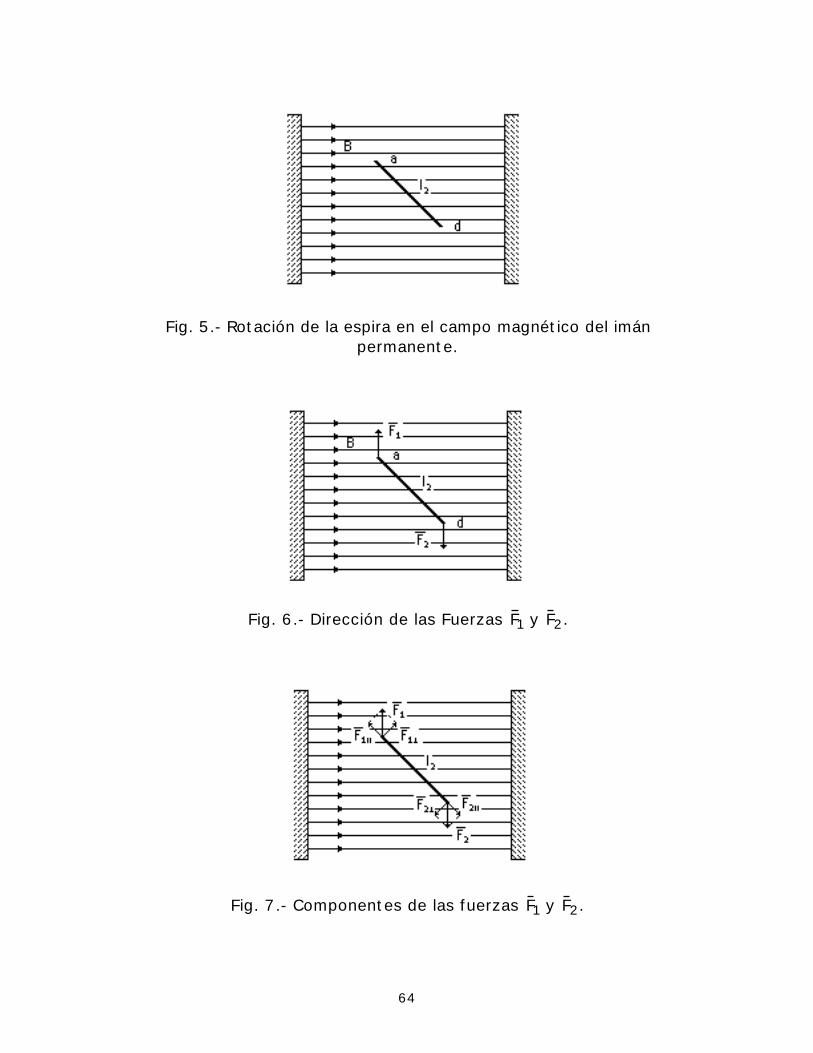
64
Fig. 5.- Rotación de la espira en el campo magnético del imánpermanente.
Fig. 6.- Dirección de las Fuerzas F 1 y F 2.
Fig. 7.- Componentes de las fuerzas F 1 y F 2.

65
Las magnitudes de las componentes perpendiculares al plano dela espira son:
F1⊥ = F1cosβ (5.5)
F2⊥ = F2 cosβ (5.6)
por lo que el torque ejercido sobre dicha espira tiene ahora la siguientemagnitud:
T = I B A cosβ (5.7)
Debido a dicho torque, la espira va a seguir girando en la mismadirección en la que lo estaba haciendo, por lo que el ángulo va a iraumentando y en consecuencia las magnitudes de F 1, F 2 y T van a irdisminuyendo hasta hacerse cero cuando β=90°. En este instante comoT=0, cesa la rotación y la espira queda en reposo en la posiciónmostrada en la Figura 8.
Fig. 8.- Espira en reposo
Observemos que este proceso va a ocurrir independientementedel valor de la magnitud de la corriente. Podemos concluir que todaespira ubicada en un campo magnético B y a través de la cual estécirculando una corriente I, va a rotar hasta ubicarse en forma tal queel campo magnético sea perpendicular a su plano.
Por lo tanto surge inmediatamente la siguiente pregunta: ¿Quépodemos hacer para que la rotación de la espira sea proporcional a lamagnitud de la corriente en lugar de ser siempre de 90°?.
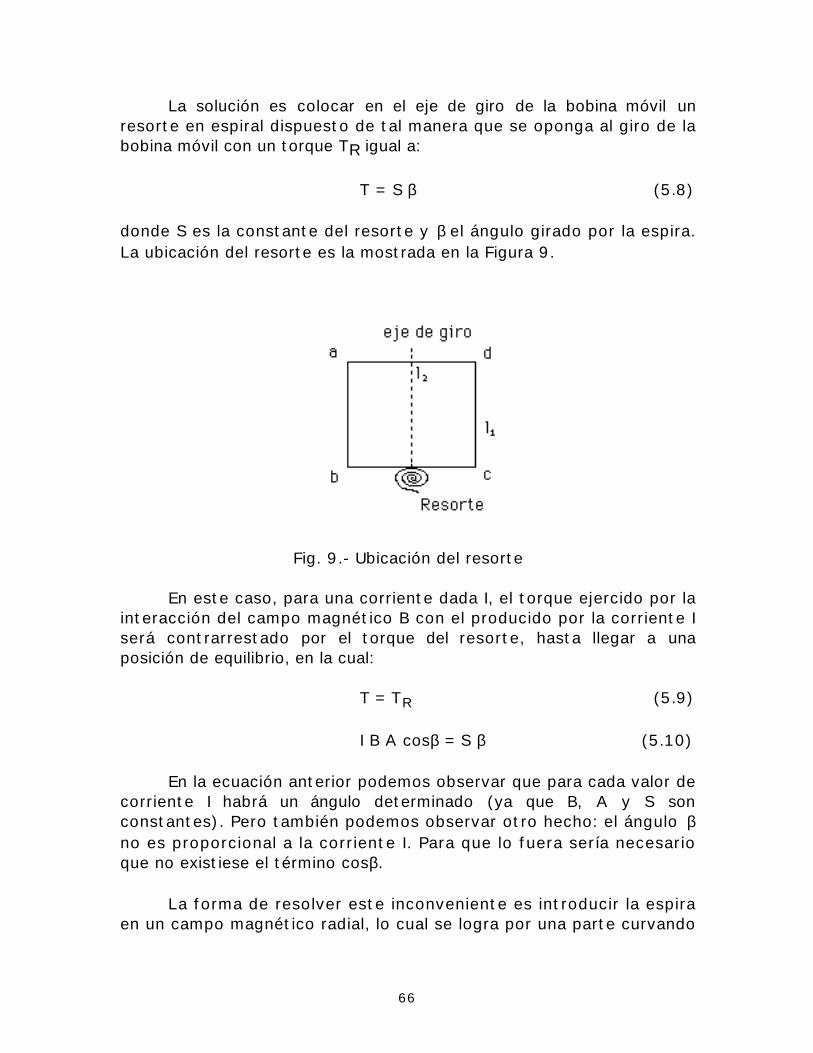
66
La solución es colocar en el eje de giro de la bobina móvil unresorte en espiral dispuesto de tal manera que se oponga al giro de labobina móvil con un torque TR igual a:
T = S β (5.8)
donde S es la constante del resorte y β el ángulo girado por la espira.La ubicación del resorte es la mostrada en la Figura 9.
Fig. 9.- Ubicación del resorte
En este caso, para una corriente dada I, el torque ejercido por lainteracción del campo magnético B con el producido por la corriente Iserá contrarrestado por el torque del resorte, hasta llegar a unaposición de equilibrio, en la cual:
T = TR (5.9)
I B A cosβ = S β (5.10)
En la ecuación anterior podemos observar que para cada valor decorriente I habrá un ángulo determinado (ya que B, A y S sonconstantes). Pero también podemos observar otro hecho: el ángulo βno es proporcional a la corriente I. Para que lo fuera sería necesarioque no existiese el término cosβ.
La forma de resolver este inconveniente es introducir la espiraen un campo magnético radial, lo cual se logra por una parte curvando
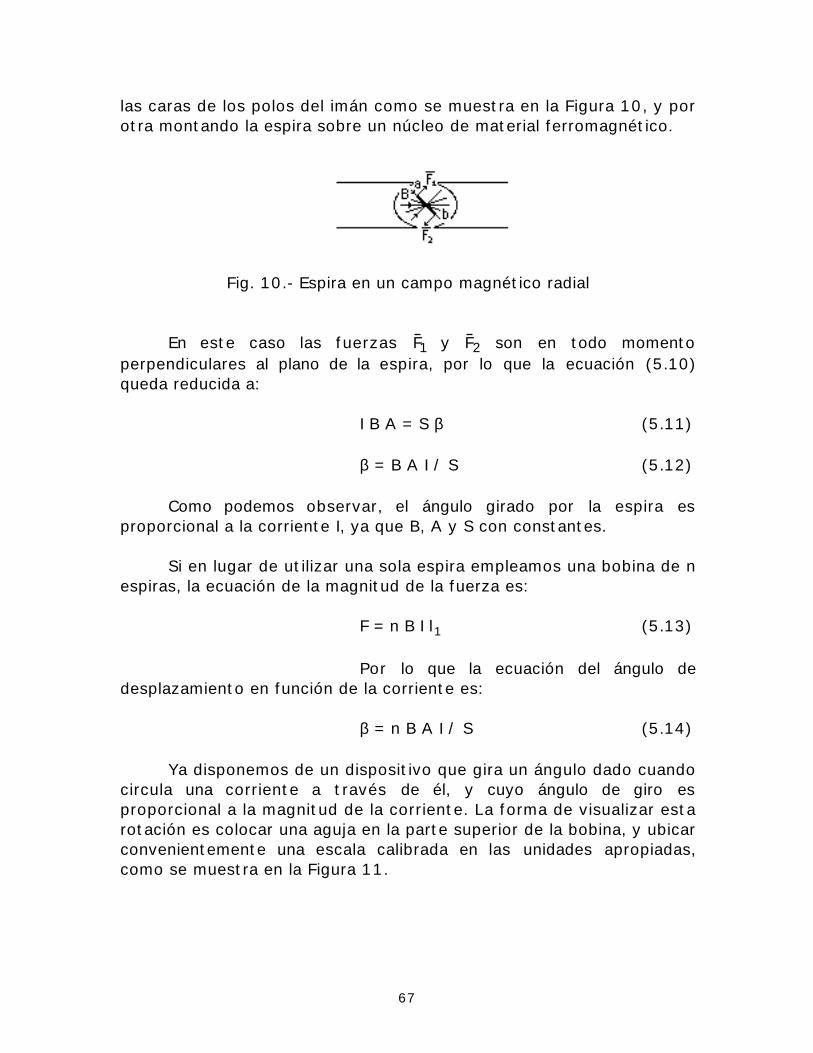
67
las caras de los polos del imán como se muestra en la Figura 10, y porotra montando la espira sobre un núcleo de material ferromagnético.
Fig. 10.- Espira en un campo magnético radial
En este caso las fuerzas F 1 y F 2 son en todo momentoperpendiculares al plano de la espira, por lo que la ecuación (5.10)queda reducida a:
I B A = S β (5.11)
β = B A I / S (5.12)
Como podemos observar, el ángulo girado por la espira esproporcional a la corriente I, ya que B, A y S con constantes.
Si en lugar de utilizar una sola espira empleamos una bobina de nespiras, la ecuación de la magnitud de la fuerza es:
F = n B I l1 (5.13)
Por lo que la ecuación del ángulo dedesplazamiento en función de la corriente es:
β = n B A I / S (5.14)
Ya disponemos de un dispositivo que gira un ángulo dado cuandocircula una corriente a través de él, y cuyo ángulo de giro esproporcional a la magnitud de la corriente. La forma de visualizar estarotación es colocar una aguja en la parte superior de la bobina, y ubicarconvenientemente una escala calibrada en las unidades apropiadas,como se muestra en la Figura 11.
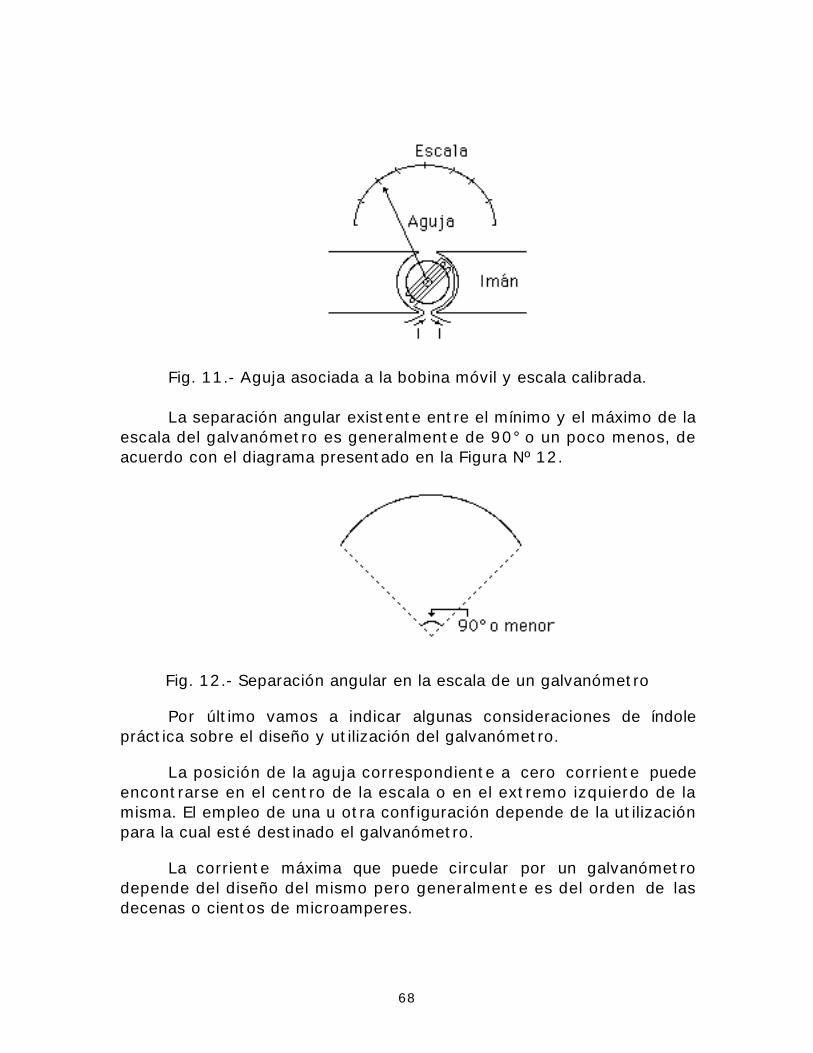
68
Fig. 11.- Aguja asociada a la bobina móvil y escala calibrada.
La separación angular existente entre el mínimo y el máximo de laescala del galvanómetro es generalmente de 90° o un poco menos, deacuerdo con el diagrama presentado en la Figura Nº 12.
Fig. 12.- Separación angular en la escala de un galvanómetro
Por último vamos a indicar algunas consideraciones de índolepráctica sobre el diseño y utilización del galvanómetro.
La posición de la aguja correspondiente a cero corriente puedeencontrarse en el centro de la escala o en el extremo izquierdo de lamisma. El empleo de una u otra configuración depende de la utilizaciónpara la cual esté destinado el galvanómetro.
La corriente máxima que puede circular por un galvanómetrodepende del diseño del mismo pero generalmente es del orden de lasdecenas o cientos de microamperes.
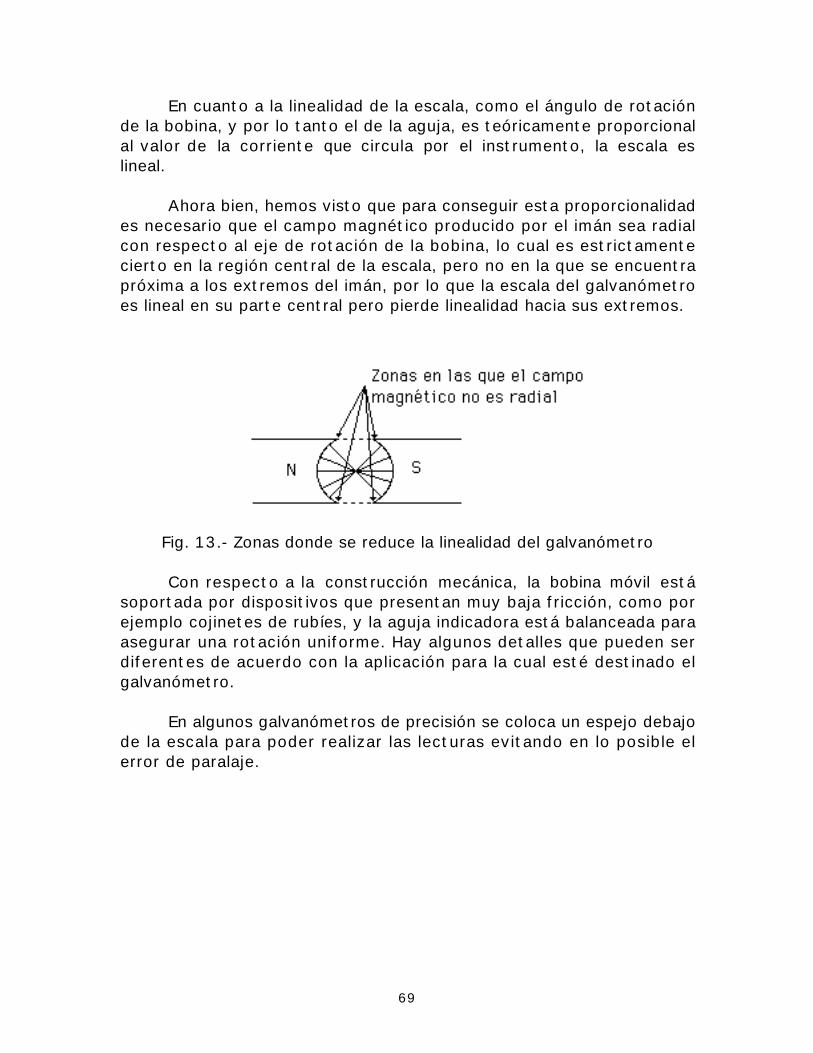
69
En cuanto a la linealidad de la escala, como el ángulo de rotaciónde la bobina, y por lo tanto el de la aguja, es teóricamente proporcionalal valor de la corriente que circula por el instrumento, la escala eslineal.
Ahora bien, hemos visto que para conseguir esta proporcionalidades necesario que el campo magnético producido por el imán sea radialcon respecto al eje de rotación de la bobina, lo cual es estrictamentecierto en la región central de la escala, pero no en la que se encuentrapróxima a los extremos del imán, por lo que la escala del galvanómetroes lineal en su parte central pero pierde linealidad hacia sus extremos.
Fig. 13.- Zonas donde se reduce la linealidad del galvanómetro
Con respecto a la construcción mecánica, la bobina móvil estásoportada por dispositivos que presentan muy baja fricción, como porejemplo cojinetes de rubíes, y la aguja indicadora está balanceada paraasegurar una rotación uniforme. Hay algunos detalles que pueden serdiferentes de acuerdo con la aplicación para la cual esté destinado elgalvanómetro.
En algunos galvanómetros de precisión se coloca un espejo debajode la escala para poder realizar las lecturas evitando en lo posible elerror de paralaje.
70
CAPITULO VI
AMPERIMETRO, VOLTIMETRO, OHMETRO y MULTIMETRO
6.1 INTRODUCCION.
En el Capítulo V estudiamos uno de los dispositivos más útilespara detectar el paso de una corriente por un circuito: El galvanómetrode D'Arsonval. Ahora bien, debido a la poca capacidad de corriente deeste instrumento, sólo lo podemos utilizar en su forma original en casosmuy específicos, donde las corrientes que tengamos que medir seanmuy pequeñas. En vista de lo anterior podemos plantearnos la siguientepregunta: ¿En qué forma se pueden ampliar las posibilidades de mediciónde este dispositivo, para incluirlo en distintos tipos de circuitos ysistemas de medición?.
La respuesta a esta interrogación la encontramos en dos confi-guraciones circuitales sumamente sencillas: El divisor de corriente y elde voltaje. Vamos a estudiar a continuación en qué forma podemosutilizarlas para poder fabricar con el galvanómetro que tenemos anuestra disposición amperímetros, voltímetros, y óhmetros cuyosrangos de medición se ajusten a nuestras necesidades.
6.2 AMPERIMETRO DC.
6.2.1.- Diseño.
El diseño de un amperímetro DC capaz de medir corrientes dentrode un rango específico, se basa en la utilización de un divisor decorriente, como el mostrado en la Figura 1.
En el nodo A la corriente i se divide en dos: i1 e i2. Por ley deKirchhoff se tiene que cumplir:
i = i1 +i2 (6.1)
además
VAB = i1R1 = i2R2 (6.2)
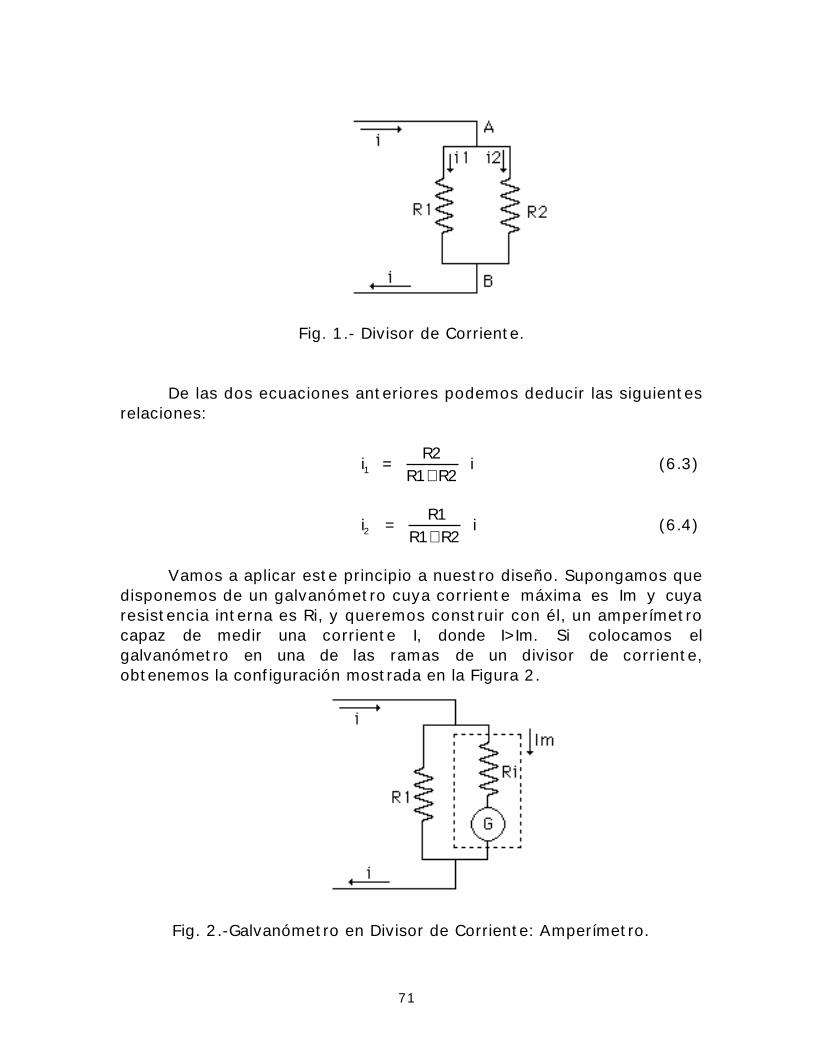
71
Fig. 1.- Divisor de Corriente.
De las dos ecuaciones anteriores podemos deducir las siguientesrelaciones:
i1 =
R2R1+ R2
i (6.3)
i2 =
R1R1+ R2
i (6.4)
Vamos a aplicar este principio a nuestro diseño. Supongamos quedisponemos de un galvanómetro cuya corriente máxima es Im y cuyaresistencia interna es Ri, y queremos construir con él, un amperímetrocapaz de medir una corriente I, donde I>Im. Si colocamos elgalvanómetro en una de las ramas de un divisor de corriente,obtenemos la configuración mostrada en la Figura 2.
Fig. 2.-Galvanómetro en Divisor de Corriente: Amperímetro.
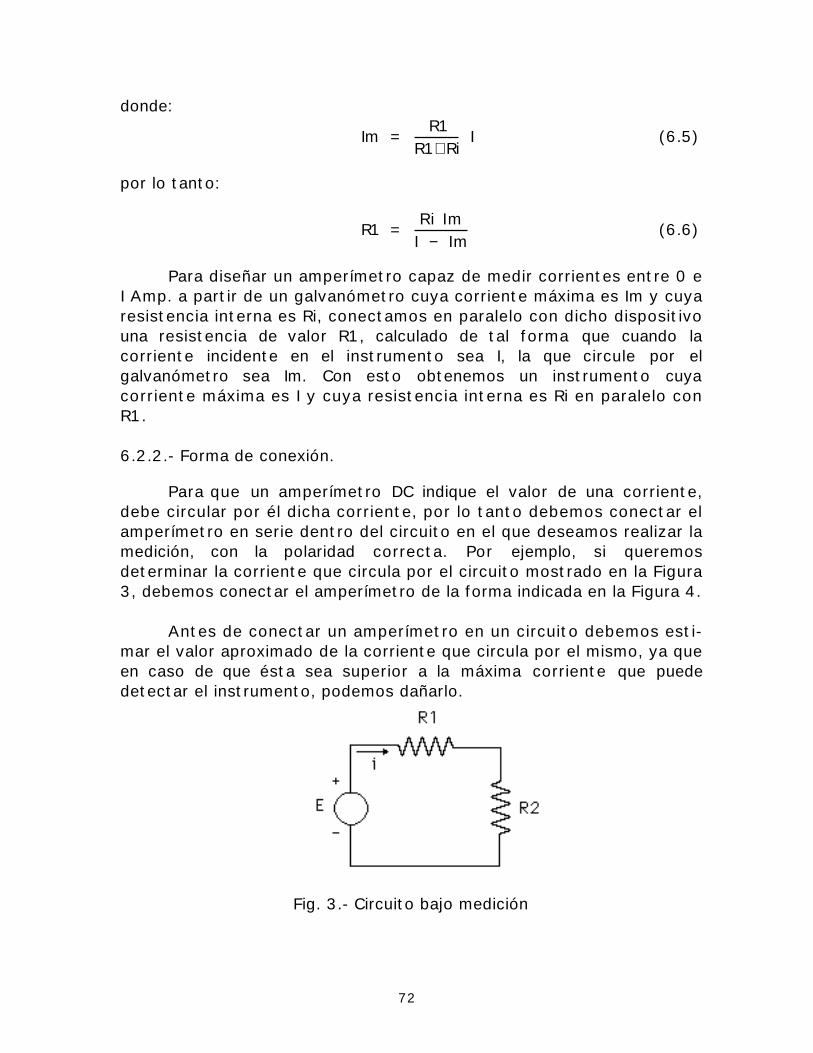
72
donde:
Im =
R1R1+ Ri
I (6.5)
por lo tanto:
R1 =
Ri ImI − Im
(6.6)
Para diseñar un amperímetro capaz de medir corrientes entre 0 eI Amp. a partir de un galvanómetro cuya corriente máxima es Im y cuyaresistencia interna es Ri, conectamos en paralelo con dicho dispositivouna resistencia de valor R1, calculado de tal forma que cuando lacorriente incidente en el instrumento sea I, la que circule por elgalvanómetro sea Im. Con esto obtenemos un instrumento cuyacorriente máxima es I y cuya resistencia interna es Ri en paralelo conR1.
6.2.2.- Forma de conexión.
Para que un amperímetro DC indique el valor de una corriente,debe circular por él dicha corriente, por lo tanto debemos conectar elamperímetro en serie dentro del circuito en el que deseamos realizar lamedición, con la polaridad correcta. Por ejemplo, si queremosdeterminar la corriente que circula por el circuito mostrado en la Figura3, debemos conectar el amperímetro de la forma indicada en la Figura 4.
Antes de conectar un amperímetro en un circuito debemos esti-mar el valor aproximado de la corriente que circula por el mismo, ya queen caso de que ésta sea superior a la máxima corriente que puededetectar el instrumento, podemos dañarlo.
Fig. 3.- Circuito bajo medición
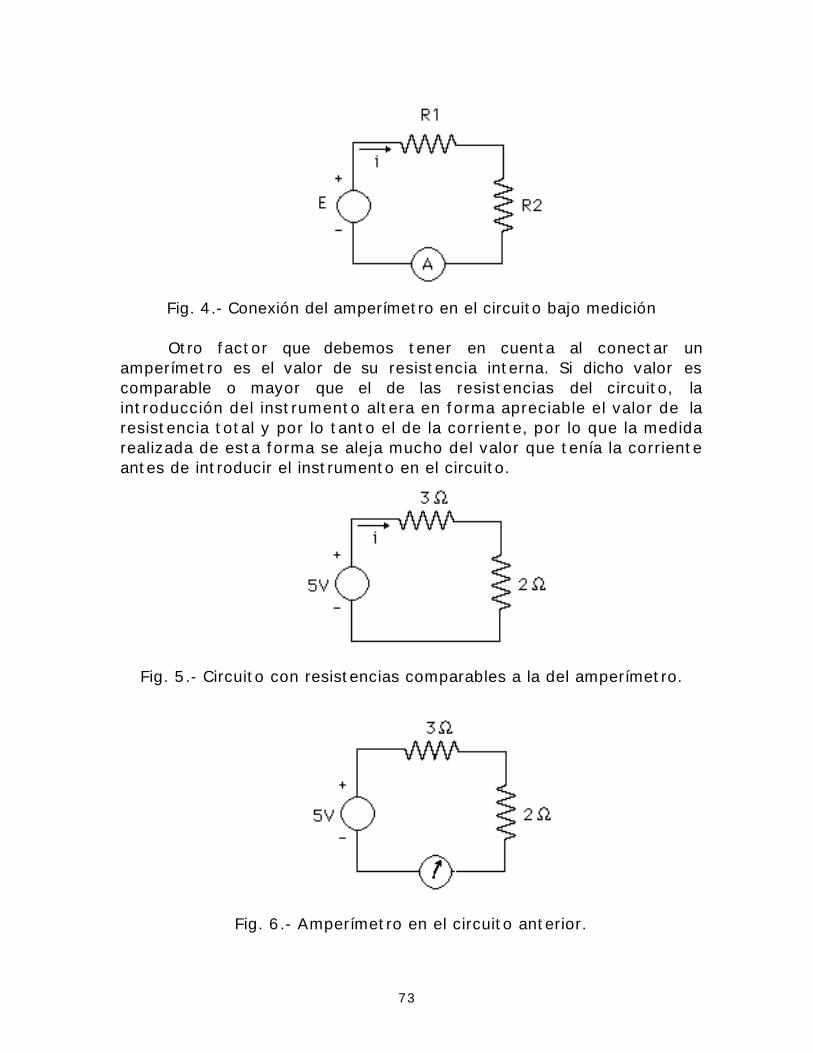
73
Fig. 4.- Conexión del amperímetro en el circuito bajo medición
Otro factor que debemos tener en cuenta al conectar unamperímetro es el valor de su resistencia interna. Si dicho valor escomparable o mayor que el de las resistencias del circuito, laintroducción del instrumento altera en forma apreciable el valor de laresistencia total y por lo tanto el de la corriente, por lo que la medidarealizada de esta forma se aleja mucho del valor que tenía la corrienteantes de introducir el instrumento en el circuito.
Fig. 5.- Circuito con resistencias comparables a la del amperímetro.
Fig. 6.- Amperímetro en el circuito anterior.
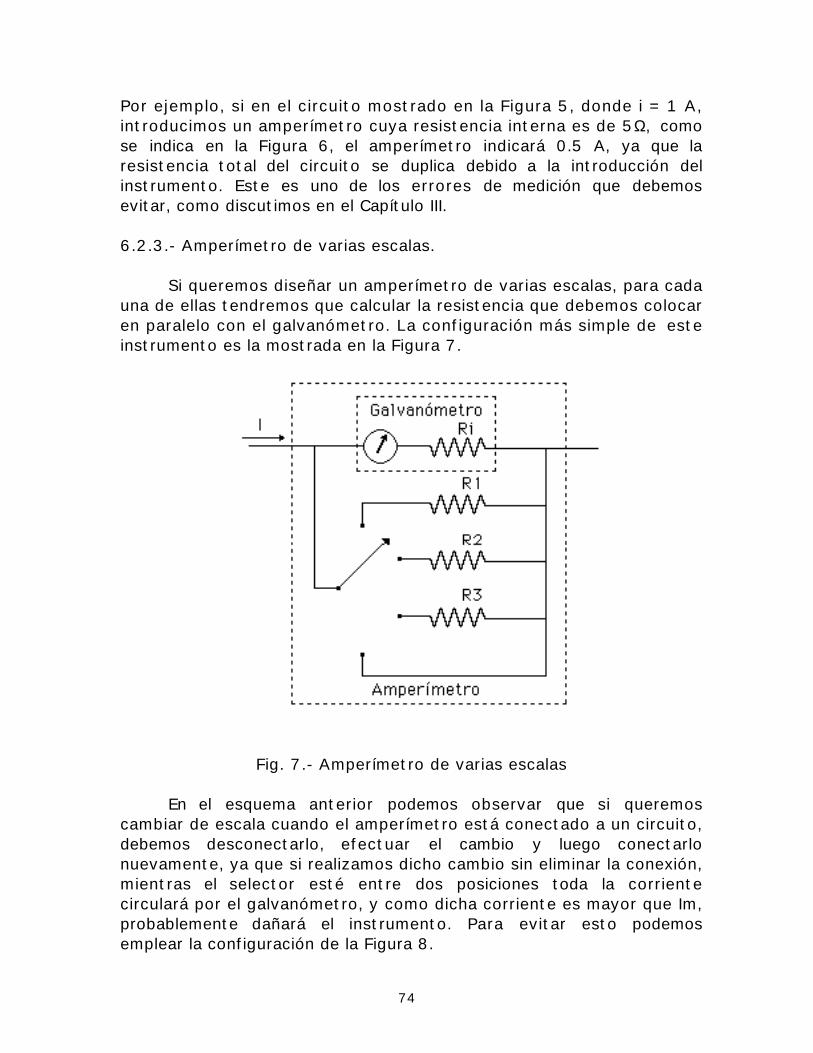
74
Por ejemplo, si en el circuito mostrado en la Figura 5, donde i = 1 A,introducimos un amperímetro cuya resistencia interna es de 5Ω, comose indica en la Figura 6, el amperímetro indicará 0.5 A, ya que laresistencia total del circuito se duplica debido a la introducción delinstrumento. Este es uno de los errores de medición que debemosevitar, como discutimos en el Capítulo III.
6.2.3.- Amperímetro de varias escalas.
Si queremos diseñar un amperímetro de varias escalas, para cadauna de ellas tendremos que calcular la resistencia que debemos colocaren paralelo con el galvanómetro. La configuración más simple de esteinstrumento es la mostrada en la Figura 7.
Fig. 7.- Amperímetro de varias escalas
En el esquema anterior podemos observar que si queremoscambiar de escala cuando el amperímetro está conectado a un circuito,debemos desconectarlo, efectuar el cambio y luego conectarlonuevamente, ya que si realizamos dicho cambio sin eliminar la conexión,mientras el selector esté entre dos posiciones toda la corrientecirculará por el galvanómetro, y como dicha corriente es mayor que Im,probablemente dañará el instrumento. Para evitar esto podemosemplear la configuración de la Figura 8.
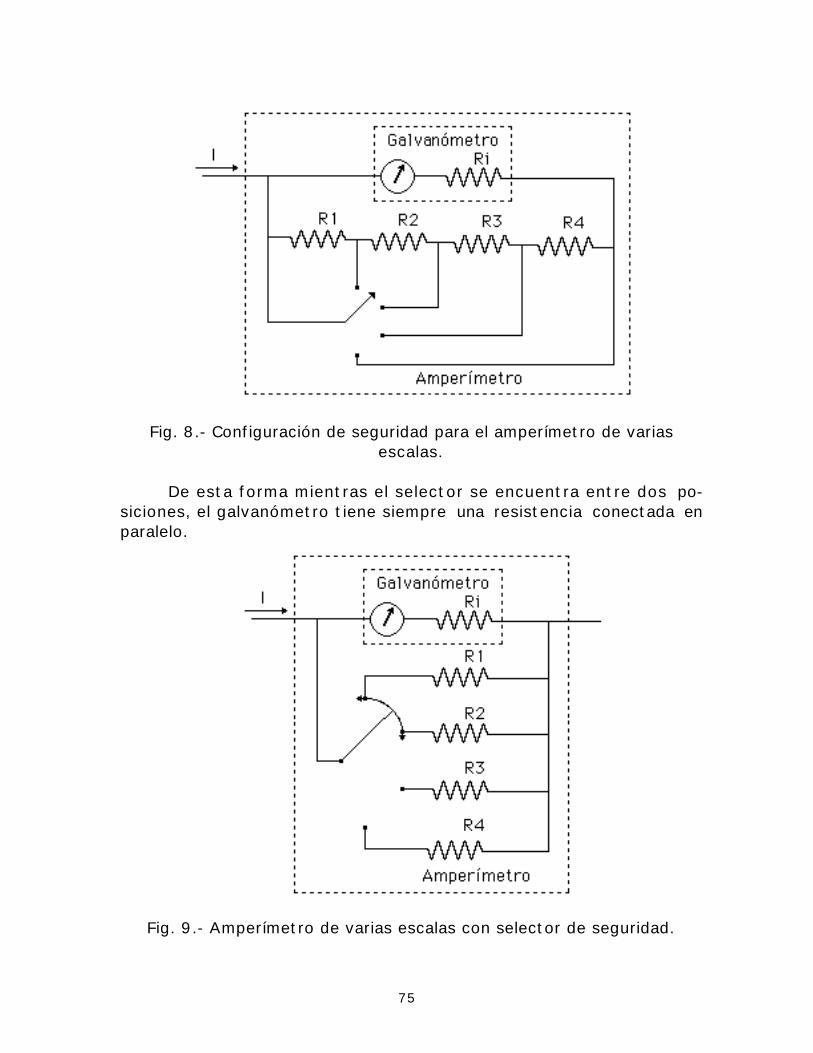
75
Fig. 8.- Configuración de seguridad para el amperímetro de varias
escalas.
De esta forma mientras el selector se encuentra entre dos po-siciones, el galvanómetro tiene siempre una resistencia conectada enparalelo.
Fig. 9.- Amperímetro de varias escalas con selector de seguridad.
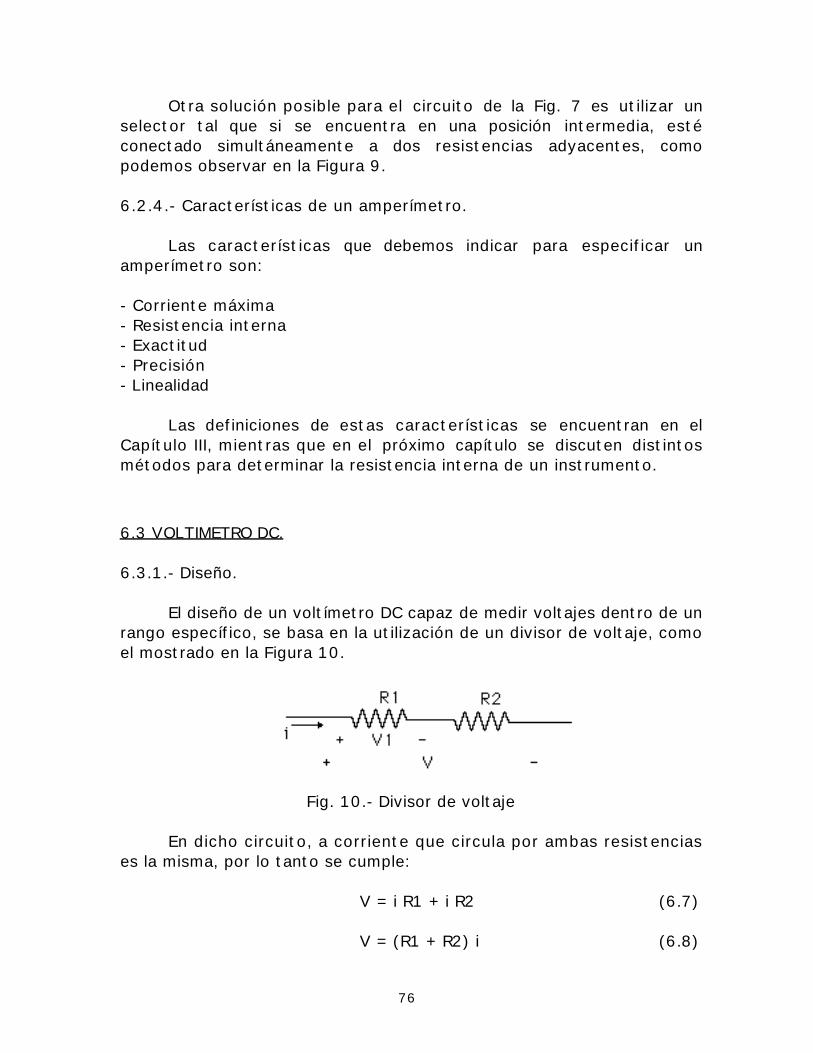
76
Otra solución posible para el circuito de la Fig. 7 es utilizar unselector tal que si se encuentra en una posición intermedia, estéconectado simultáneamente a dos resistencias adyacentes, comopodemos observar en la Figura 9.
6.2.4.- Características de un amperímetro.
Las características que debemos indicar para especificar unamperímetro son:
- Corriente máxima- Resistencia interna- Exactitud- Precisión- Linealidad
Las definiciones de estas características se encuentran en elCapítulo III, mientras que en el próximo capítulo se discuten distintosmétodos para determinar la resistencia interna de un instrumento.
6.3 VOLTIMETRO DC.
6.3.1.- Diseño.
El diseño de un voltímetro DC capaz de medir voltajes dentro de unrango específico, se basa en la utilización de un divisor de voltaje, comoel mostrado en la Figura 10.
Fig. 10.- Divisor de voltaje
En dicho circuito, a corriente que circula por ambas resistenciases la misma, por lo tanto se cumple:
V = i R1 + i R2 (6.7)
V = (R1 + R2) i (6.8)
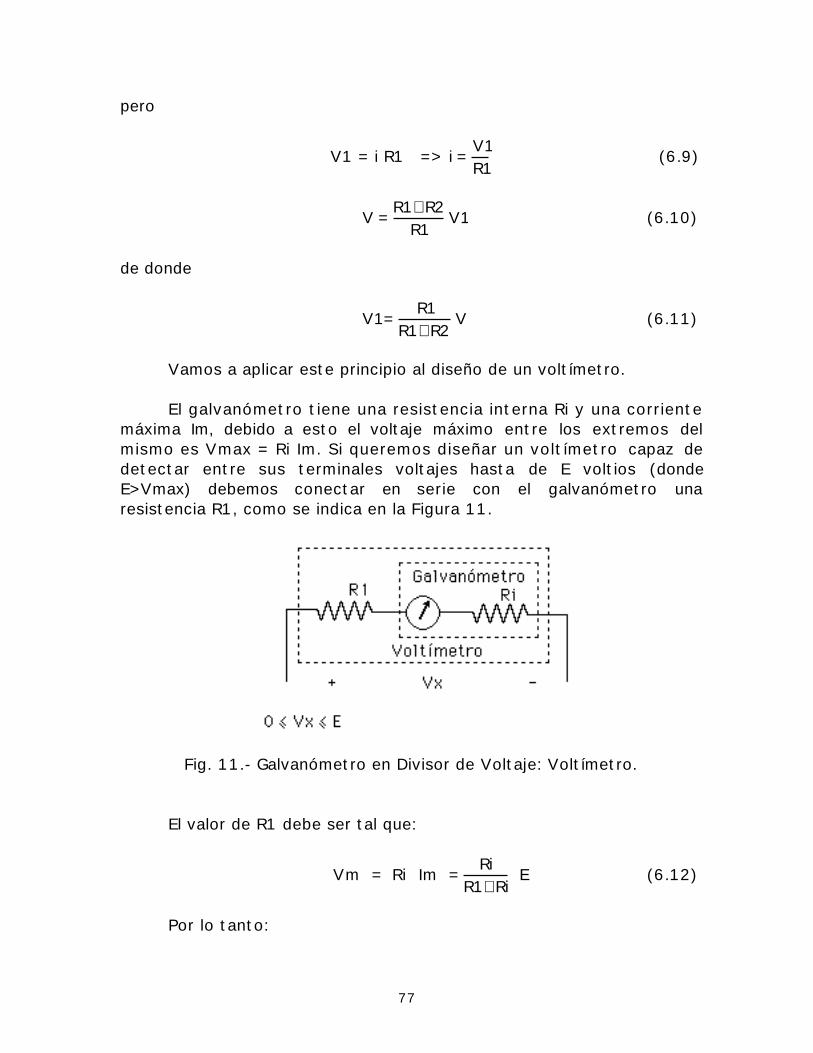
77
pero
V1 = i R1 => i =
V1R1
(6.9)
V =
R1+ R2R1
V1 (6.10)
de donde
V1=
R1R1+ R2
V (6.11)
Vamos a aplicar este principio al diseño de un voltímetro.
El galvanómetro tiene una resistencia interna Ri y una corrientemáxima Im, debido a esto el voltaje máximo entre los extremos delmismo es Vmax = Ri Im. Si queremos diseñar un voltímetro capaz dedetectar entre sus terminales voltajes hasta de E voltios (dondeE>Vmax) debemos conectar en serie con el galvanómetro unaresistencia R1, como se indica en la Figura 11.
Fig. 11.- Galvanómetro en Divisor de Voltaje: Voltímetro.
El valor de R1 debe ser tal que:
Vm = Ri Im =
RiR1+ Ri
E (6.12)
Por lo tanto:
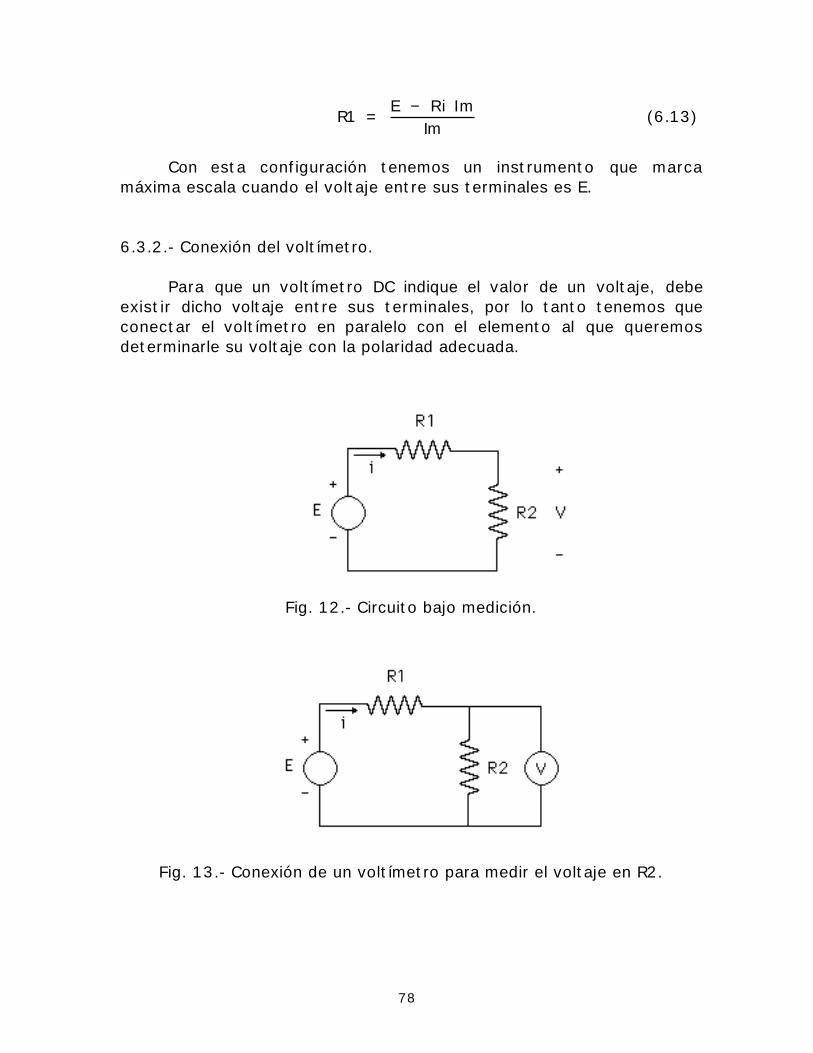
78
R1 =
E − Ri ImIm
(6.13)
Con esta configuración tenemos un instrumento que marcamáxima escala cuando el voltaje entre sus terminales es E.
6.3.2.- Conexión del voltímetro.
Para que un voltímetro DC indique el valor de un voltaje, debeexistir dicho voltaje entre sus terminales, por lo tanto tenemos queconectar el voltímetro en paralelo con el elemento al que queremosdeterminarle su voltaje con la polaridad adecuada.
Fig. 12.- Circuito bajo medición.
Fig. 13.- Conexión de un voltímetro para medir el voltaje en R2.
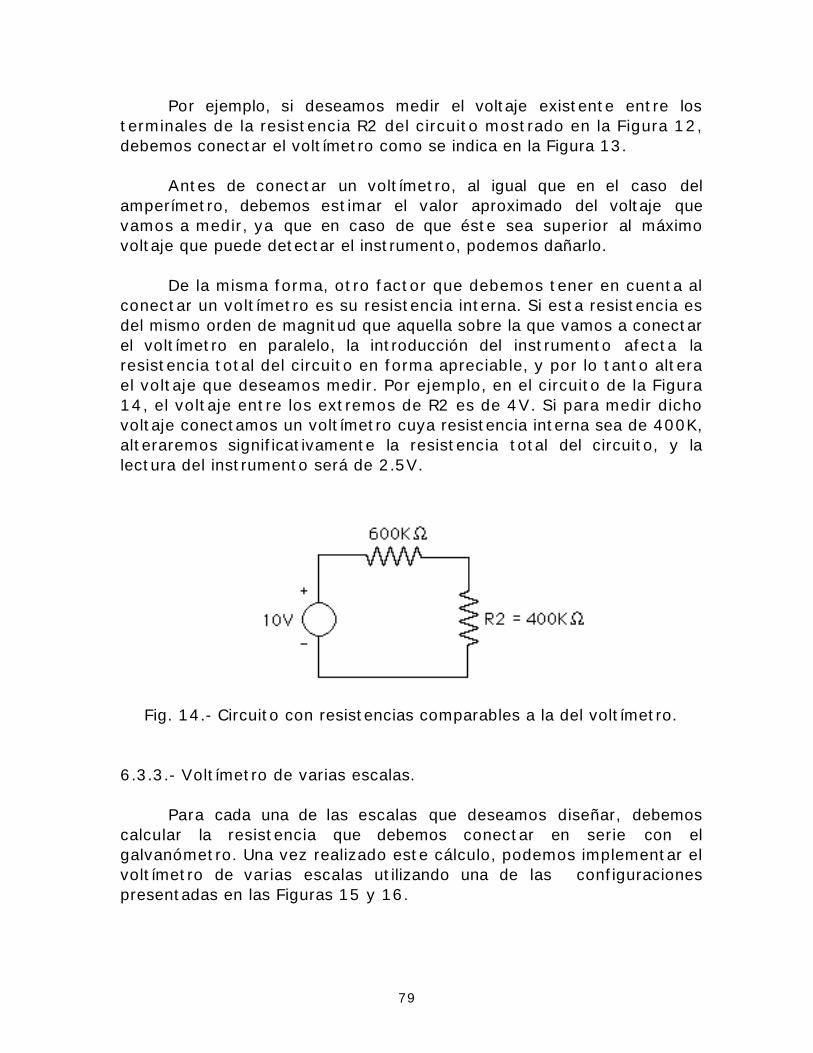
79
Por ejemplo, si deseamos medir el voltaje existente entre losterminales de la resistencia R2 del circuito mostrado en la Figura 12,debemos conectar el voltímetro como se indica en la Figura 13.
Antes de conectar un voltímetro, al igual que en el caso delamperímetro, debemos estimar el valor aproximado del voltaje quevamos a medir, ya que en caso de que éste sea superior al máximovoltaje que puede detectar el instrumento, podemos dañarlo.
De la misma forma, otro factor que debemos tener en cuenta alconectar un voltímetro es su resistencia interna. Si esta resistencia esdel mismo orden de magnitud que aquella sobre la que vamos a conectarel voltímetro en paralelo, la introducción del instrumento afecta laresistencia total del circuito en forma apreciable, y por lo tanto alterael voltaje que deseamos medir. Por ejemplo, en el circuito de la Figura14, el voltaje entre los extremos de R2 es de 4V. Si para medir dichovoltaje conectamos un voltímetro cuya resistencia interna sea de 400K,alteraremos significativamente la resistencia total del circuito, y lalectura del instrumento será de 2.5V.
Fig. 14.- Circuito con resistencias comparables a la del voltímetro.
6.3.3.- Voltímetro de varias escalas.
Para cada una de las escalas que deseamos diseñar, debemoscalcular la resistencia que debemos conectar en serie con elgalvanómetro. Una vez realizado este cálculo, podemos implementar elvoltímetro de varias escalas utilizando una de las configuracionespresentadas en las Figuras 15 y 16.
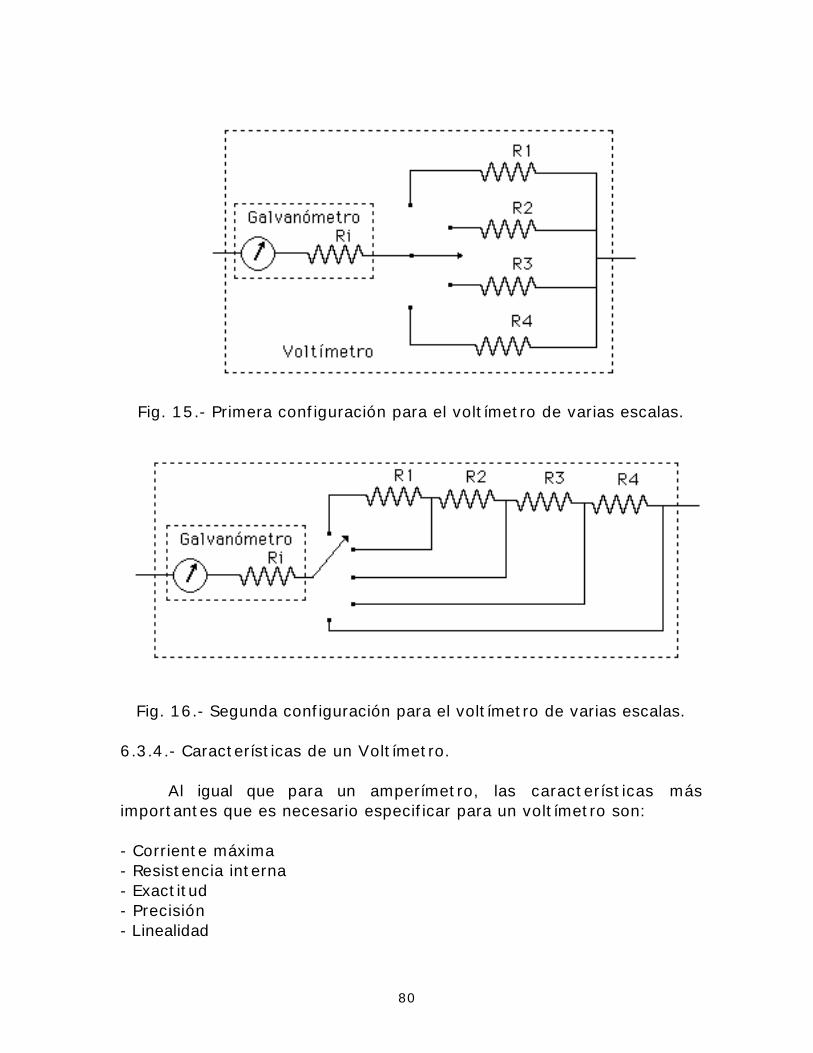
80
Fig. 15.- Primera configuración para el voltímetro de varias escalas.
Fig. 16.- Segunda configuración para el voltímetro de varias escalas.
6.3.4.- Características de un Voltímetro.
Al igual que para un amperímetro, las características másimportantes que es necesario especificar para un voltímetro son:
- Corriente máxima- Resistencia interna- Exactitud- Precisión- Linealidad
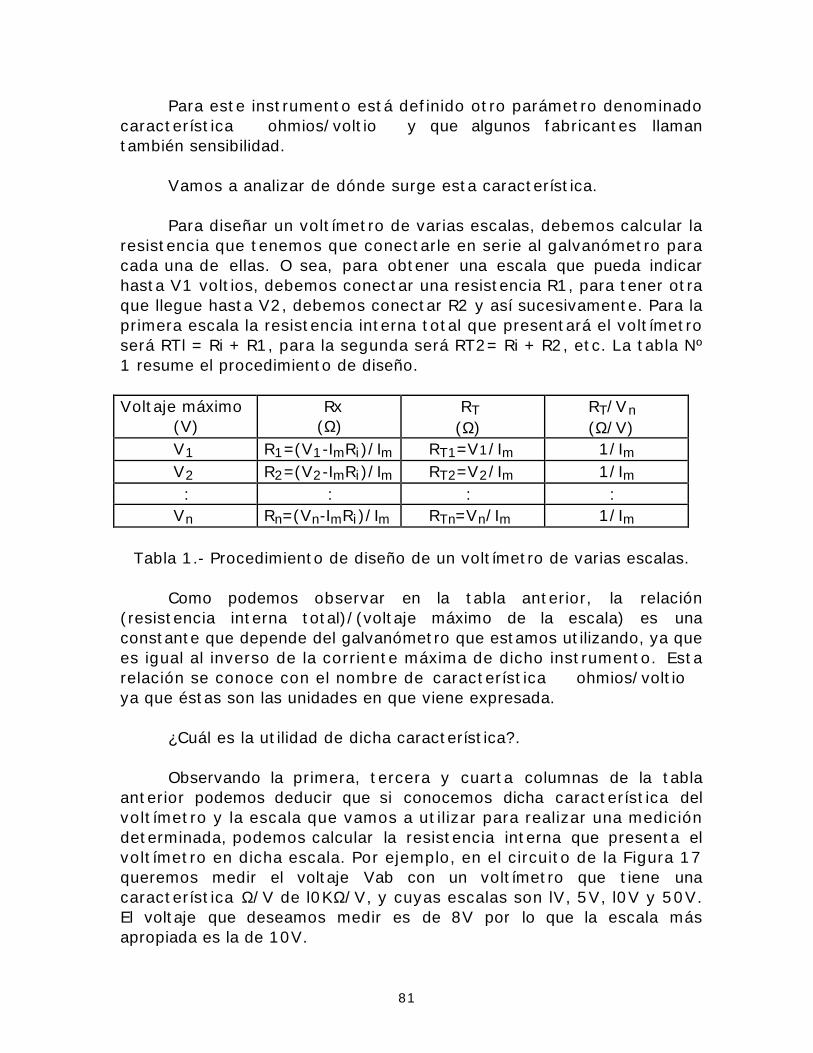
81
Para este instrumento está definido otro parámetro denominadocaracterística ohmios/voltio y que algunos fabricantes llamantambién sensibilidad.
Vamos a analizar de dónde surge esta característica.
Para diseñar un voltímetro de varias escalas, debemos calcular laresistencia que tenemos que conectarle en serie al galvanómetro paracada una de ellas. O sea, para obtener una escala que pueda indicarhasta V1 voltios, debemos conectar una resistencia R1, para tener otraque llegue hasta V2, debemos conectar R2 y así sucesivamente. Para laprimera escala la resistencia interna total que presentará el voltímetroserá RTl = Ri + R1, para la segunda será RT2= Ri + R2, etc. La tabla Nº1 resume el procedimiento de diseño.
Voltaje máximo (V)
Rx (Ω)
RT (Ω)
RT/Vn (Ω/V)
V1 R1=(V1-ImR i )/Im RT1=V1/Im 1/Im V2 R2=(V2-ImR i )/Im RT2=V2/Im 1/Im : : : : Vn Rn=(Vn-ImR i )/Im RTn=Vn/Im 1/Im
Tabla 1.- Procedimiento de diseño de un voltímetro de varias escalas.
Como podemos observar en la tabla anterior, la relación(resistencia interna total)/(voltaje máximo de la escala) es unaconstante que depende del galvanómetro que estamos utilizando, ya quees igual al inverso de la corriente máxima de dicho instrumento. Estarelación se conoce con el nombre de característica ohmios/voltioya que éstas son las unidades en que viene expresada.
¿Cuál es la utilidad de dicha característica?.
Observando la primera, tercera y cuarta columnas de la tablaanterior podemos deducir que si conocemos dicha característica delvoltímetro y la escala que vamos a utilizar para realizar una medicióndeterminada, podemos calcular la resistencia interna que presenta elvoltímetro en dicha escala. Por ejemplo, en el circuito de la Figura 17queremos medir el voltaje Vab con un voltímetro que tiene unacaracterística Ω/V de l0KΩ/V, y cuyas escalas son lV, 5V, l0V y 50V.El voltaje que deseamos medir es de 8V por lo que la escala másapropiada es la de 10V.
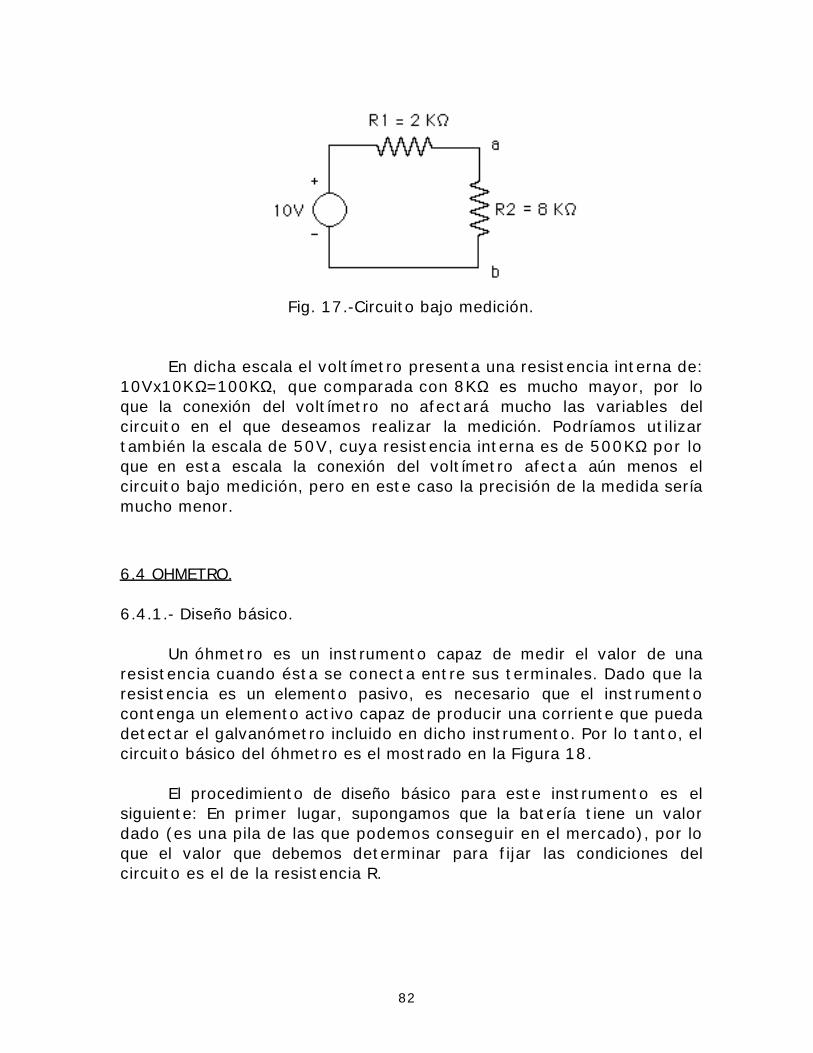
82
Fig. 17.-Circuito bajo medición.
En dicha escala el voltímetro presenta una resistencia interna de:10Vx10KΩ=100KΩ, que comparada con 8KΩ es mucho mayor, por loque la conexión del voltímetro no afectará mucho las variables delcircuito en el que deseamos realizar la medición. Podríamos utilizartambién la escala de 50V, cuya resistencia interna es de 500KΩ por loque en esta escala la conexión del voltímetro afecta aún menos elcircuito bajo medición, pero en este caso la precisión de la medida seríamucho menor.
6.4 OHMETRO.
6.4.1.- Diseño básico.
Un óhmetro es un instrumento capaz de medir el valor de unaresistencia cuando ésta se conecta entre sus terminales. Dado que laresistencia es un elemento pasivo, es necesario que el instrumentocontenga un elemento activo capaz de producir una corriente que puedadetectar el galvanómetro incluido en dicho instrumento. Por lo tanto, elcircuito básico del óhmetro es el mostrado en la Figura 18.
El procedimiento de diseño básico para este instrumento es elsiguiente: En primer lugar, supongamos que la batería tiene un valordado (es una pila de las que podemos conseguir en el mercado), por loque el valor que debemos determinar para fijar las condiciones delcircuito es el de la resistencia R.
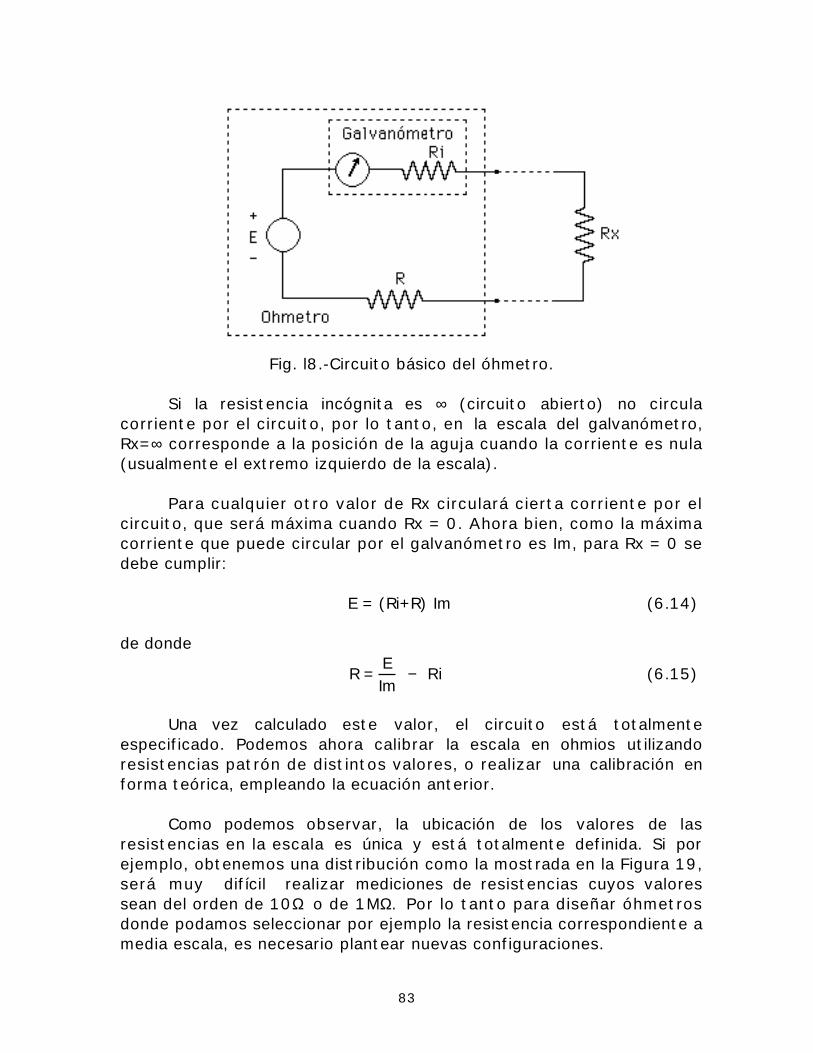
83
Fig. l8.-Circuito básico del óhmetro.
Si la resistencia incógnita es ∞ (circuito abierto) no circulacorriente por el circuito, por lo tanto, en la escala del galvanómetro,Rx=∞ corresponde a la posición de la aguja cuando la corriente es nula(usualmente el extremo izquierdo de la escala).
Para cualquier otro valor de Rx circulará cierta corriente por elcircuito, que será máxima cuando Rx = 0. Ahora bien, como la máximacorriente que puede circular por el galvanómetro es Im, para Rx = 0 sedebe cumplir:
E = (Ri+R) Im (6.14)
de donde
R =
EIm
− Ri (6.15)
Una vez calculado este valor, el circuito está totalmenteespecificado. Podemos ahora calibrar la escala en ohmios utilizandoresistencias patrón de distintos valores, o realizar una calibración enforma teórica, empleando la ecuación anterior.
Como podemos observar, la ubicación de los valores de lasresistencias en la escala es única y está totalmente definida. Si porejemplo, obtenemos una distribución como la mostrada en la Figura 19,será muy difícil realizar mediciones de resistencias cuyos valoressean del orden de 10Ω o de 1MΩ. Por lo tanto para diseñar óhmetrosdonde podamos seleccionar por ejemplo la resistencia correspondiente amedia escala, es necesario plantear nuevas configuraciones.
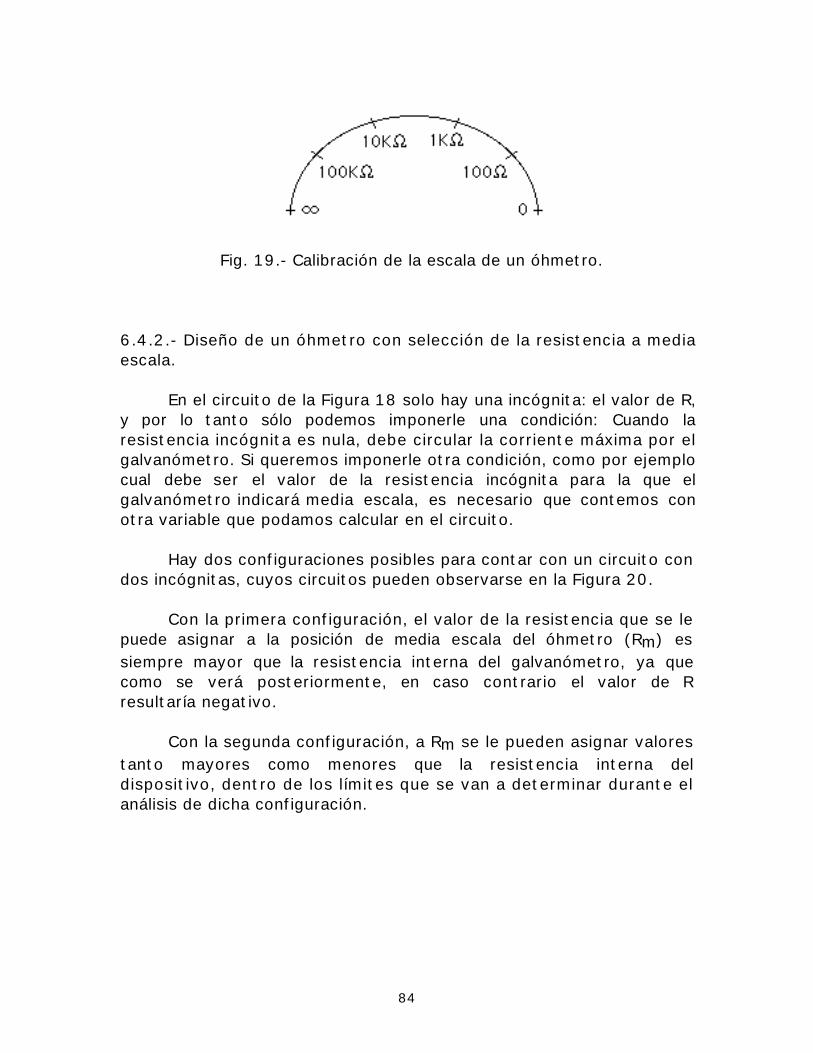
84
Fig. 19.- Calibración de la escala de un óhmetro.
6.4.2.- Diseño de un óhmetro con selección de la resistencia a mediaescala.
En el circuito de la Figura 18 solo hay una incógnita: el valor de R,y por lo tanto sólo podemos imponerle una condición: Cuando laresistencia incógnita es nula, debe circular la corriente máxima por elgalvanómetro. Si queremos imponerle otra condición, como por ejemplocual debe ser el valor de la resistencia incógnita para la que elgalvanómetro indicará media escala, es necesario que contemos conotra variable que podamos calcular en el circuito.
Hay dos configuraciones posibles para contar con un circuito condos incógnitas, cuyos circuitos pueden observarse en la Figura 20.
Con la primera configuración, el valor de la resistencia que se lepuede asignar a la posición de media escala del óhmetro (Rm) essiempre mayor que la resistencia interna del galvanómetro, ya quecomo se verá posteriormente, en caso contrario el valor de Rresultaría negativo.
Con la segunda configuración, a Rm se le pueden asignar valorestanto mayores como menores que la resistencia interna deldispositivo, dentro de los límites que se van a determinar durante elanálisis de dicha configuración.
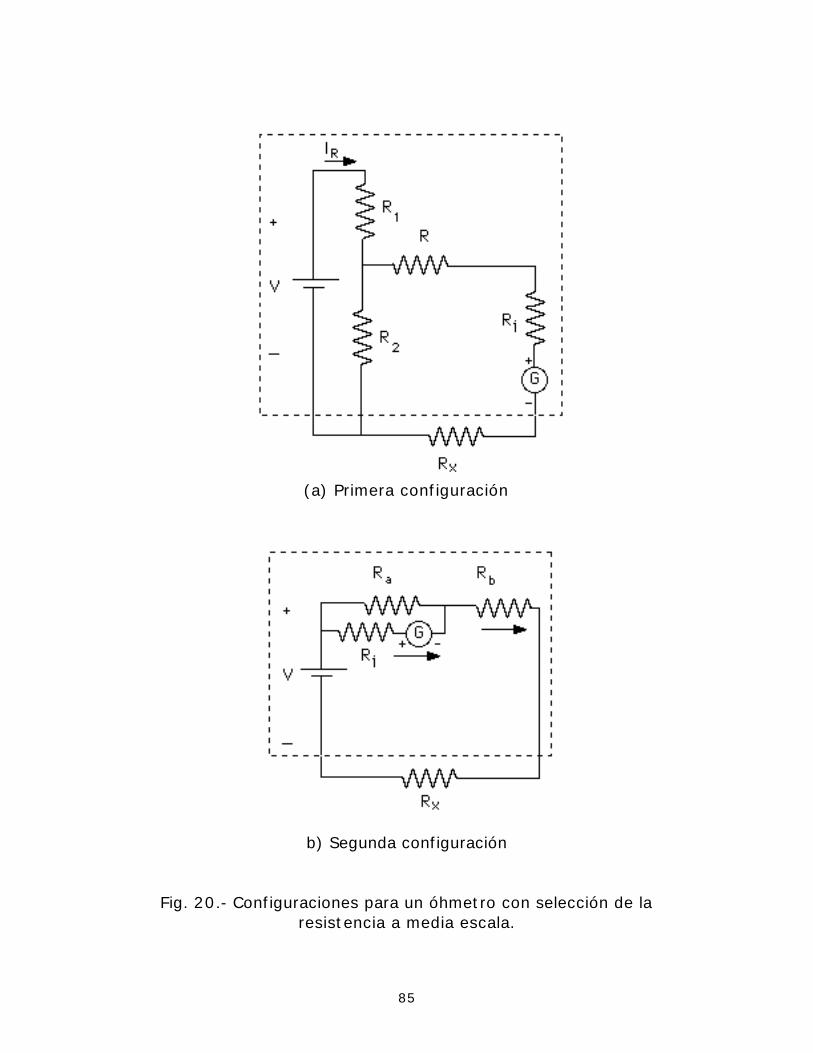
85
(a) Primera configuración
b) Segunda configuración
Fig. 20.- Configuraciones para un óhmetro con selección de laresistencia a media escala.
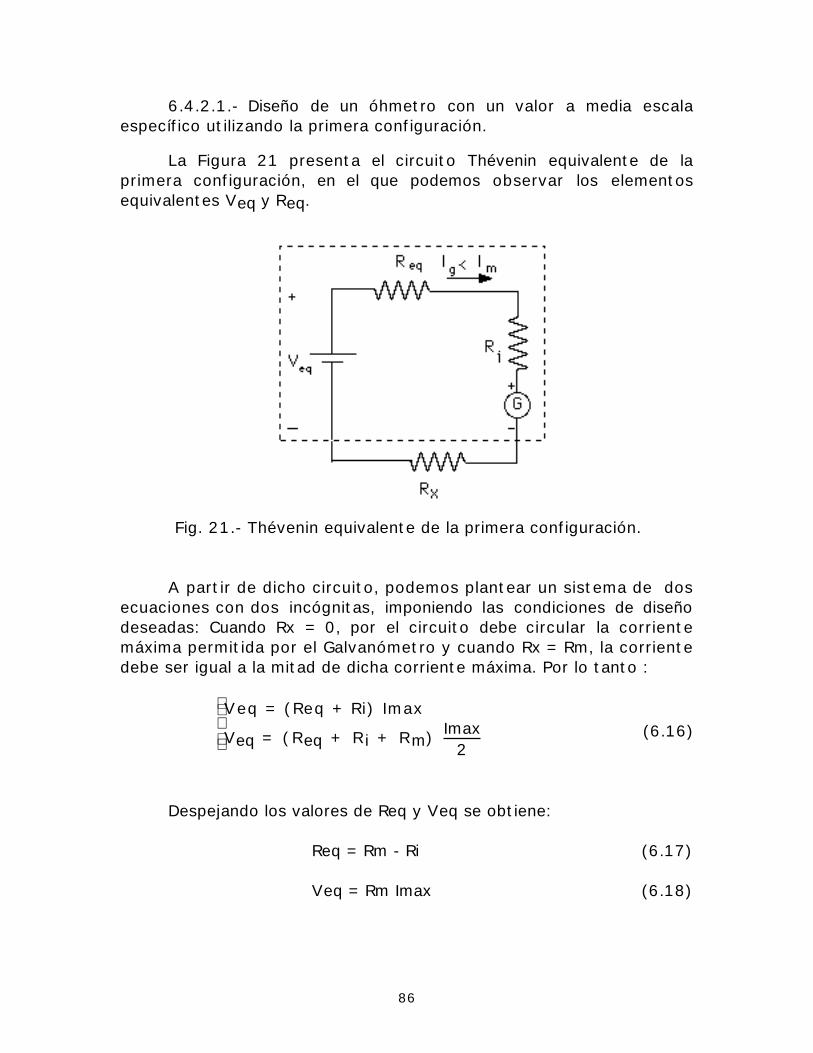
86
6.4.2.1.- Diseño de un óhmetro con un valor a media escalaespecífico utilizando la primera configuración.
La Figura 21 presenta el circuito Thévenin equivalente de laprimera configuración, en el que podemos observar los elementosequivalentes Veq y Req.
Fig. 21.- Thévenin equivalente de la primera configuración.
A partir de dicho circuito, podemos plantear un sistema de dosecuaciones con dos incógnitas, imponiendo las condiciones de diseñodeseadas: Cuando Rx = 0, por el circuito debe circular la corrientemáxima permitida por el Galvanómetro y cuando Rx = Rm, la corrientedebe ser igual a la mitad de dicha corriente máxima. Por lo tanto :
Veq = (Req + Ri) Imax
Veq = (Req + R i + R m) Imax
2 (6.16)
Despejando los valores de Req y Veq se obtiene:
Req = Rm - Ri (6.17)
Veq = Rm Imax (6.18)

87
De la ecuación (6.17) podemos concluir que la resistencia que sepuede seleccionar como lectura de media escala (Rm) debe ser siempremayor que la resistencia interna del galvanómetro (Ri) tal como sehabía mencionado anteriormente, ya que en caso contrario laresistencia Req tendría un valor negativo, lo cual no es físicamenteposible.
Una vez determinados los valores de Req y Veq, es necesariohallar los valores de V, R, R1 y R2, ya que éstos son los verdaderoscomponentes del instrumento que queremos diseñar. Las relacionesentre estos parámetros son las siguientes:
Req = R + (R1 // R2) (6.19)
Veq = V R2
R1 + R 2 (6.20)
Como podemos observar, contamos con dos ecuaciones y cuatroincógnitas, por lo que para completar el trabajo debemos incluir doscriterios de diseño que nos ayuden a determinar el valor másadecuado para los componentes. Dichos criterios de diseño son:
- Vamos a utilizar una o más pilas comerciales, cuyo valornominal es de 1,5V. Por lo tanto, si Veq es menor que 1,5V, hacemoslos cálculos con V = 1,5V, esto es, colocamos en el instrumento unasola pila; si Veq se encuentra entre 1,5V y 3V, utilizamos dos pilas,por lo que V = 3V, y así sucesivamente. Por lo general, los óhmetrosno acostumbran a tener más de dos pilas.
- Si en el circuito de la Figura 20(a) consideramos que lacorriente que circula por el lazo donde se encuentra el galvanómetroes mucho menor que la corriente que circula por la fuente V y laresistencia R1 (IR), la corriente por R2 va a ser prácticamente igual ala de R1 y por lo tanto el voltaje sobre R2 va a ser independiente de lasvariaciones de Ig. Al aplicar este criterio, el valor de la resistencia R esigual a Req, ya que el paralelo de R1 y R2 va a ser mucho menor que R.La condición que debemos imponer para que la aproximación anteriorsea válida es que la corriente IR sea mucho mayor que Imax, por lomenos unas 10 veces mayor, o preferiblemente más. Ahora bien, siescogemos un valor de IR excesivamente alto, la disipación de potencia
88
en las resistencias R1 y R2 será muy elevada, y las pilas se descarganmuy rápidamente, por lo que debemos llegar a una situación decompromiso, como por ejemplo IR = 20 Imax. (Al realizar cada diseñoen particular podemos probar otras relaciones).
Al aplicar los dos criterios de diseño mencionados, quedandeterminados los valores de V y R, y podemos plantear el siguientesistema de ecuaciones para calcular R1 y R2:
Veq = V
R2R1 + R 2
IR = 20 Imax = V
R1 + R 2
(6.21)
Resolviendo obtenemos:
R1 = V - Veq20 Imax
= V - Rm I max
20 Imax (6.22)
R2 = Veq
20 Imax =
Rm I max20 Imax
= Rm20
(6.23)
En resumen, el procedimiento para diseñar un óhmetro con laprimera configuración, utilizando un galvanómetro que tenga unaresistencia interna Ri y cuya corriente máxima sea Imax, de forma talque la lectura a media escala sea Rm, (valor que debe ser mayor queRi), es el siguiente:
a) Seleccionar una o más pilas de forma que el valor de V seamayor que Rm Imax.
b) Seleccionar R = Rm - Ri
c) Seleccionar un factor F entre la corriente que va a circularpor la fuente y la corriente máxima del galvanómetro (por ejemplo F =20).
d) Calcular R1 = V - Rm I max
F Imax
89
e) Calcular R2 = RmF
f) Determinar la potencia disipada por cada una de las tresresistencias calculadas.
6.4.2.2.- Diseño de un óhmetro de valor a media escalaespecífico utilizando la segunda configuración.
En el circuito presentado para la segunda configuración en laFigura 20(b) podemos establecer las siguientes condiciones:
Cuando Rx es igual a cero, por el galvanómetro debe circular lacorriente Imax. Por la resistencia Rb circula una corriente I1 de valordesconocido. Al aplicar la Ley de Kirchhoff de los Voltajes al lazoinferior se obtiene:
V = Imax Ri + Rb I1 (6.24)
Donde V es una pila de valor comercial. La corriente I1 estárelacionada con Imax mediante el divisor de corriente dado por lasiguiente ecuación:
Imax = I1 Ra
Ra + R i (6.25)
Cuando Rx es igual a Rm, por el galvanómetro debe circular lamitad de la corriente máxima, Imax/2, y por la resistencia Rb circulauna corriente I2 de valor desconocido. Al aplicar la Ley de Kirchhoff delos Voltajes al lazo inferior se obtiene:
V = Imax2 Ri + Rb I2 + Rm I2 (6.26)
La corriente I2 está relacionada con Imax/2 mediante el divisorde corriente dado por la siguiente ecuación:
Imax2
= I2 Ra
Ra + R i (6.27)

90
Las ecuaciones (6.24), (6.25), (6.26) y (6.27) forman unsistema de cuatro ecuaciones con cuatro incógnitas (Ra, Rb, I1 e I2) apartir del cual se pueden calcular los valores de interés para diseñar unóhmetro utilizando la segunda configuración (Ra y Rb). A partir de lasecuaciones (6.25) y (6.27) se puede deducir:
I1 = 2 I2 (6.28)
Sustituyendo esta relación en la ecuación (6.24) se obtiene:
V = Imax Ri + Rb 2 I2 (6.29)
Las ecuaciones (6.24) y (6.29) forman un sistema de dosecuaciones con dos incógnitas (I2 y Rb) tal como se puede observar acontinuación:
V = Imax R i + R b 2 I 2
V = Imax2 Ri + R b I 2 + R m I 2
(6.30)
De donde se obtiene:
Rb = V - Imax Ri
V Rm (6.31)
I2 = V2 Rm
(6.32)
La ecuación (6.31) indica que para que el diseño sea realizable esnecesario que el voltaje V sea mayor que Imax Ri, es decir, que la pilacomercial tenga un voltaje superior al máximo voltaje que puede haberentre los extremos del galvanómetro.
Para determinar el valor de la resistencia Ra se sustituye laecuación (6.32) en la (6.27), de donde se obtiene:
Ra = Imax Ri
V - Imax Rm Rm (6.33)
Esta ecuación impone una segunda condición al diseño, que puedeexpresarse de la siguiente forma:
91
Rm < VImax
o V > Rm Imax (6.34)
Es decir, la resistencia seleccionada como valor de media escaladebe ser menor que V/Imax, ya que si esta condición no se cumple, elvalor de la resistencia Ra debería ser negativo, lo cual es físicamenteimposible. Ahora bien, esta condición no es una restricción severa,dado que podemos seleccionar el valor de la fuente V utilizando laspilas que sean necesarias.
En resumen, para diseñar un óhmetro con la segundaconfiguración, utilizando un galvanómetro que tenga una resistenciainterna Ri y cuya corriente máxima sea Imax, de forma tal que lalectura a media escala sea Rm, se debe aplicar el siguienteprocedimiento:
a) Seleccionar un valor de V comercial que sea mayor que elproducto Ri Imax y que el producto Rm Imax.
b) Calcular Ra = Imax Ri
V - Imax Rm Rm
c) Calcular Rb = V - Imax Ri
V Rm
d) Determinar la potencia disipada por cada una de lasresistencias calculadas.
6.4.3.- Potenciómetro de ajuste de un óhmetro.
Por lo general, cuando se montan los circuitos corres-pondientesa cada una de las dos configuraciones analizadas, no se colocaexactamente el valor de la resistencia R obtenido para la primeraconfiguración ni el de la resistencia Rb obtenido para la segunda, sinoque se conectan resistencias de valores inferiores a los calculados yse completan colocando potenciómetros (resistencias variables) enserie. De esta forma, a medida que se va descargando la pilacomercial, puede irse ajustando la resistencia total de cada uno de loscircuitos para poder cumplir con la condición de que cuando laresistencia de medición es cero, por el galvanómetro debe circular lamáxima corriente Imax.
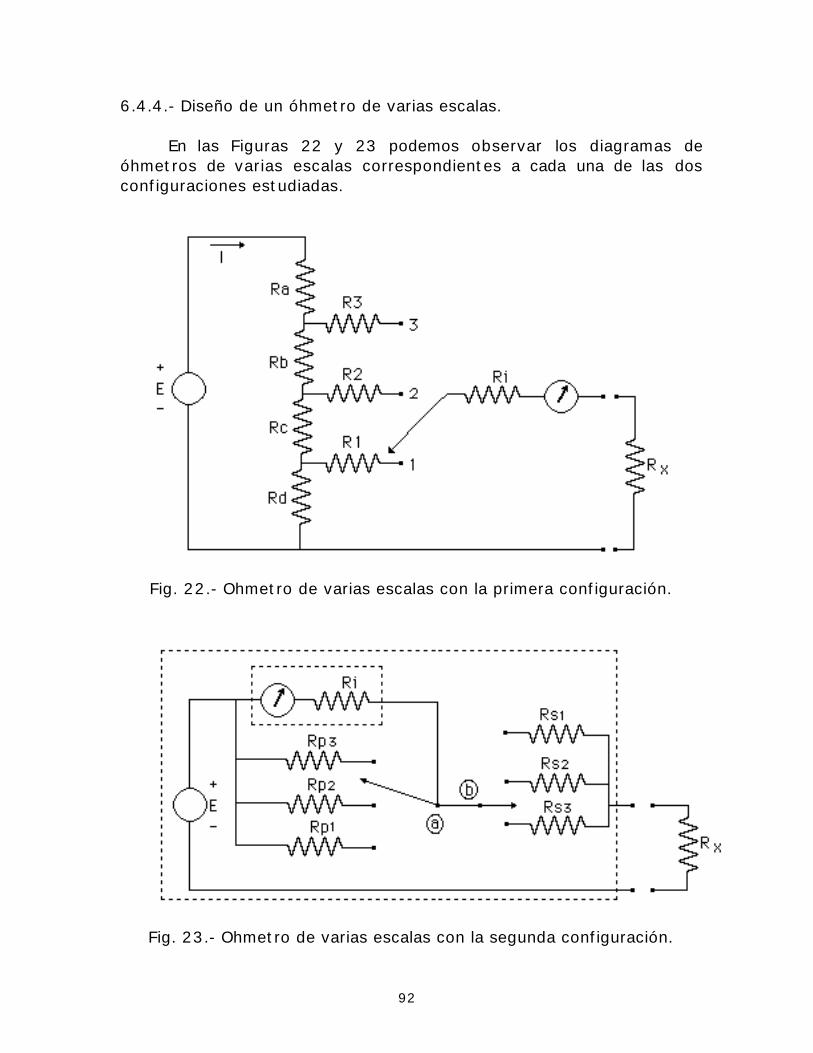
92
6.4.4.- Diseño de un óhmetro de varias escalas.
En las Figuras 22 y 23 podemos observar los diagramas deóhmetros de varias escalas correspondientes a cada una de las dosconfiguraciones estudiadas.
Fig. 22.- Ohmetro de varias escalas con la primera configuración.
Fig. 23.- Ohmetro de varias escalas con la segunda configuración.
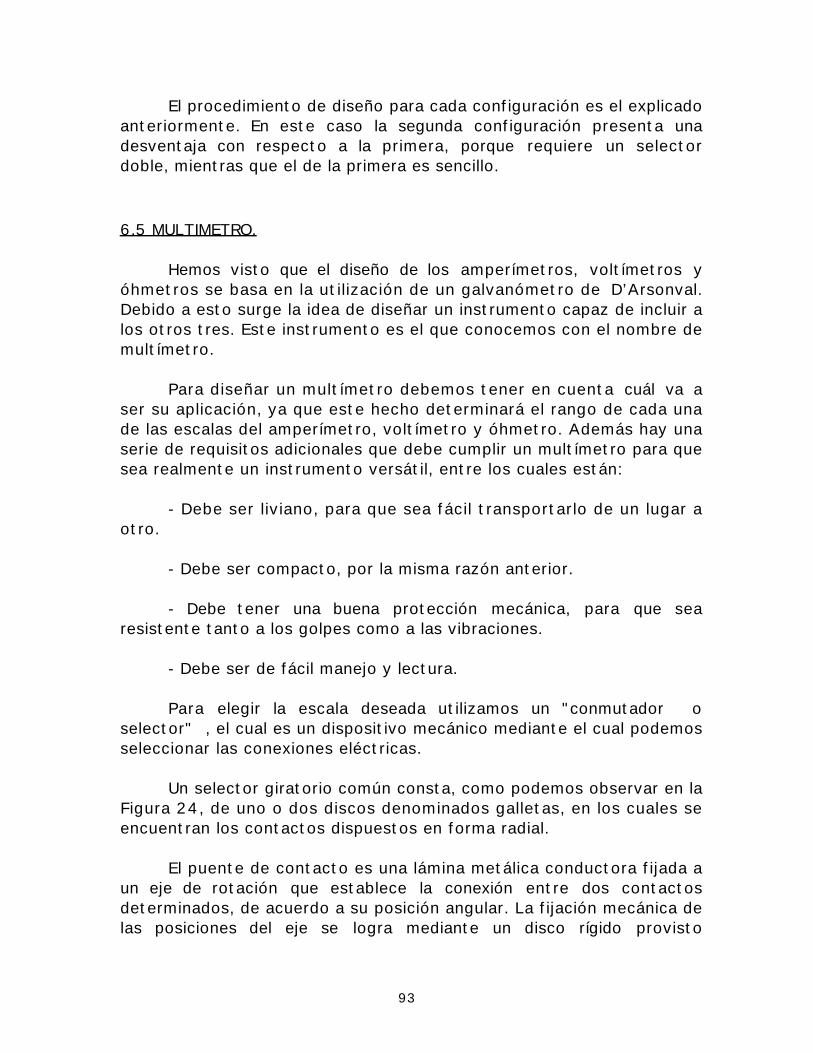
93
El procedimiento de diseño para cada configuración es el explicadoanteriormente. En este caso la segunda configuración presenta unadesventaja con respecto a la primera, porque requiere un selectordoble, mientras que el de la primera es sencillo.
6.5 MULTIMETRO.
Hemos visto que el diseño de los amperímetros, voltímetros yóhmetros se basa en la utilización de un galvanómetro de D’Arsonval.Debido a esto surge la idea de diseñar un instrumento capaz de incluir alos otros tres. Este instrumento es el que conocemos con el nombre demultímetro.
Para diseñar un multímetro debemos tener en cuenta cuál va aser su aplicación, ya que este hecho determinará el rango de cada unade las escalas del amperímetro, voltímetro y óhmetro. Además hay unaserie de requisitos adicionales que debe cumplir un multímetro para quesea realmente un instrumento versátil, entre los cuales están:
- Debe ser liviano, para que sea fácil transportarlo de un lugar aotro.
- Debe ser compacto, por la misma razón anterior.
- Debe tener una buena protección mecánica, para que searesistente tanto a los golpes como a las vibraciones.
- Debe ser de fácil manejo y lectura.
Para elegir la escala deseada utilizamos un "conmutador oselector" , el cual es un dispositivo mecánico mediante el cual podemosseleccionar las conexiones eléctricas.
Un selector giratorio común consta, como podemos observar en laFigura 24, de uno o dos discos denominados galletas, en los cuales seencuentran los contactos dispuestos en forma radial.
El puente de contacto es una lámina metálica conductora fijada aun eje de rotación que establece la conexión entre dos contactosdeterminados, de acuerdo a su posición angular. La fijación mecánica delas posiciones del eje se logra mediante un disco rígido provisto
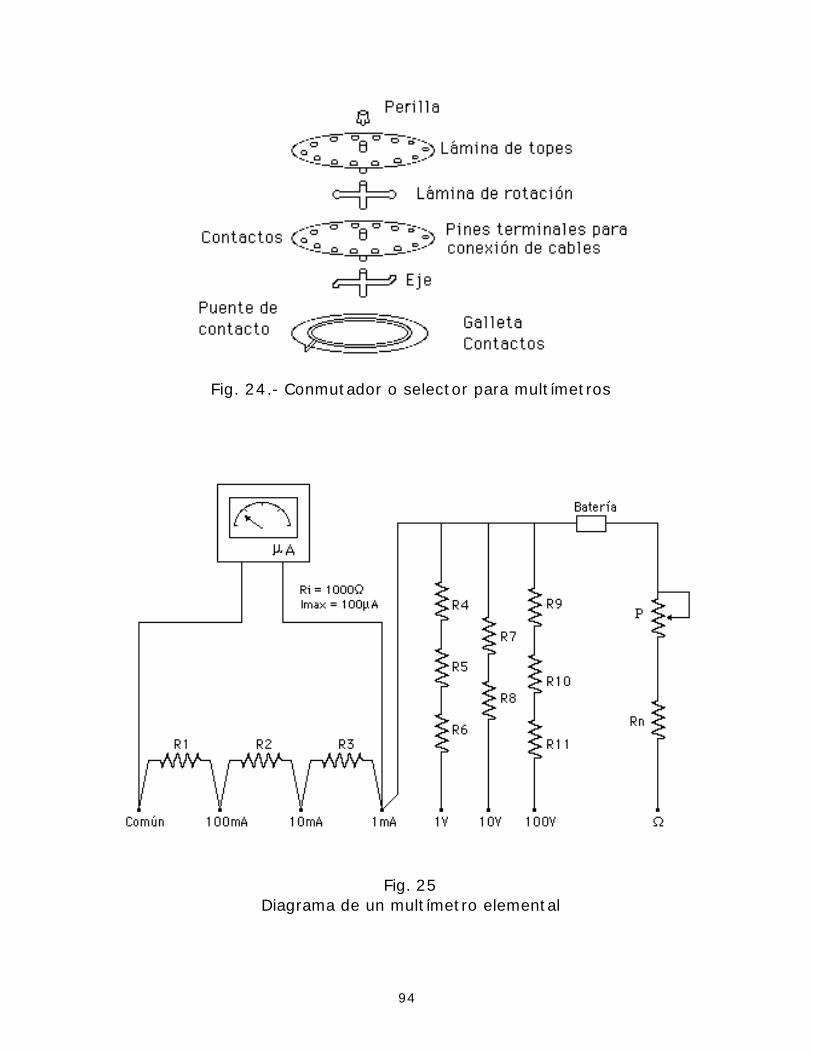
94
Fig. 24.- Conmutador o selector para multímetros
Fig. 25Diagrama de un multímetro elemental
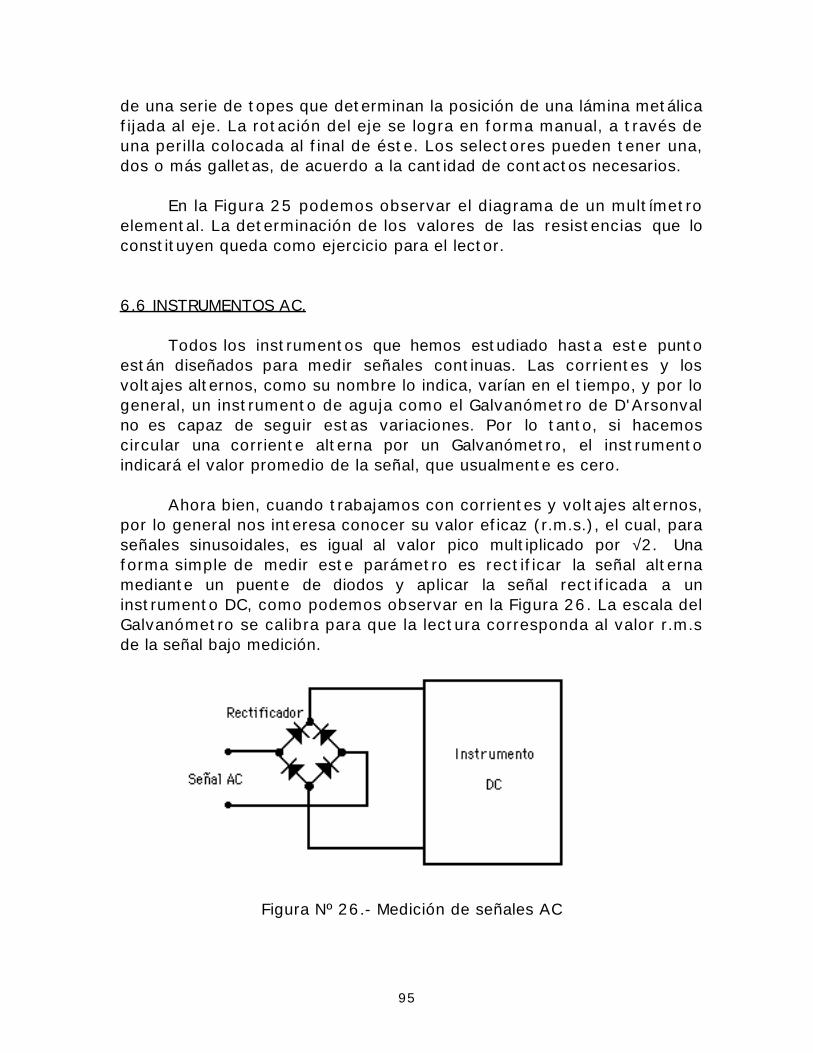
95
de una serie de topes que determinan la posición de una lámina metálicafijada al eje. La rotación del eje se logra en forma manual, a través deuna perilla colocada al final de éste. Los selectores pueden tener una,dos o más galletas, de acuerdo a la cantidad de contactos necesarios.
En la Figura 25 podemos observar el diagrama de un multímetroelemental. La determinación de los valores de las resistencias que loconstituyen queda como ejercicio para el lector.
6.6 INSTRUMENTOS AC.
Todos los instrumentos que hemos estudiado hasta este puntoestán diseñados para medir señales continuas. Las corrientes y losvoltajes alternos, como su nombre lo indica, varían en el tiempo, y por logeneral, un instrumento de aguja como el Galvanómetro de D'Arsonvalno es capaz de seguir estas variaciones. Por lo tanto, si hacemoscircular una corriente alterna por un Galvanómetro, el instrumentoindicará el valor promedio de la señal, que usualmente es cero.
Ahora bien, cuando trabajamos con corrientes y voltajes alternos,por lo general nos interesa conocer su valor eficaz (r.m.s.), el cual, paraseñales sinusoidales, es igual al valor pico multiplicado por √2. Unaforma simple de medir este parámetro es rectificar la señal alternamediante un puente de diodos y aplicar la señal rectificada a uninstrumento DC, como podemos observar en la Figura 26. La escala delGalvanómetro se calibra para que la lectura corresponda al valor r.m.sde la señal bajo medición.
Figura Nº 26.- Medición de señales AC
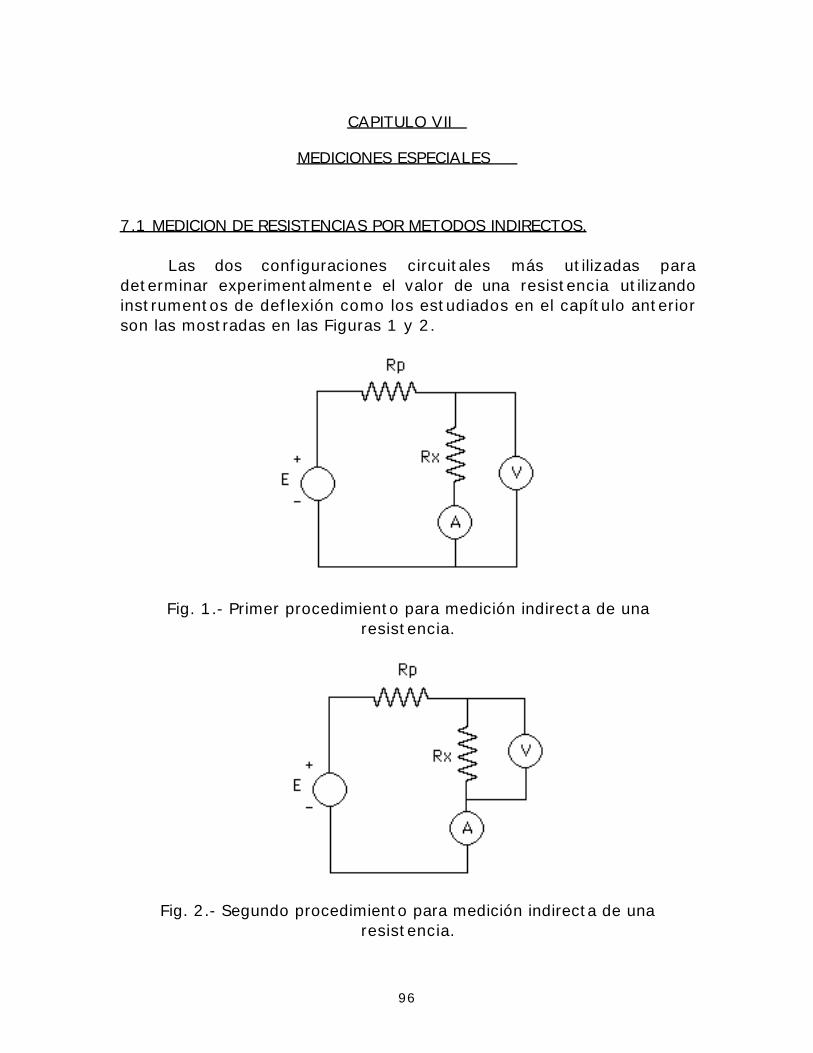
96
CAPITULO VII
MEDICIONES ESPECIALES
7.1 MEDICION DE RESISTENCIAS POR METODOS INDIRECTOS.
Las dos configuraciones circuitales más utilizadas paradeterminar experimentalmente el valor de una resistencia utilizandoinstrumentos de deflexión como los estudiados en el capítulo anteriorson las mostradas en las Figuras 1 y 2.
Fig. 1.- Primer procedimiento para medición indirecta de unaresistencia.
Fig. 2.- Segundo procedimiento para medición indirecta de unaresistencia.
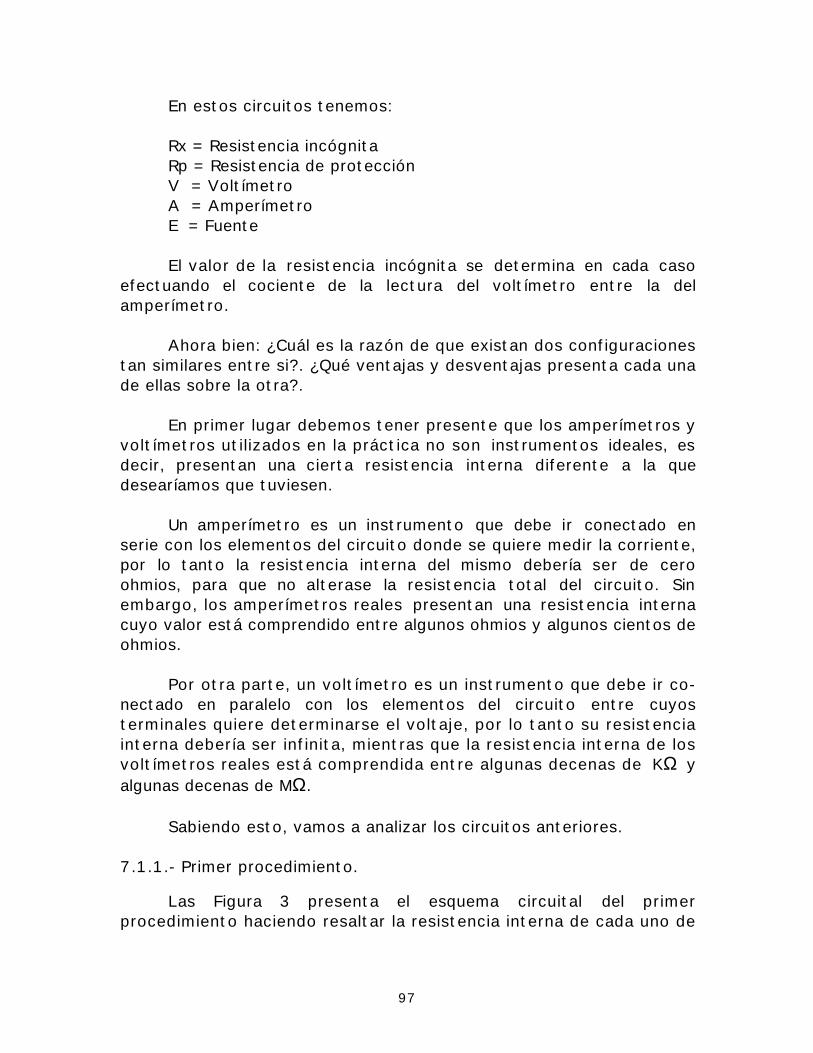
97
En estos circuitos tenemos:
Rx = Resistencia incógnitaRp = Resistencia de protección V = VoltímetroA = AmperímetroE = Fuente
El valor de la resistencia incógnita se determina en cada casoefectuando el cociente de la lectura del voltímetro entre la delamperímetro.
Ahora bien: ¿Cuál es la razón de que existan dos configuracionestan similares entre si?. ¿Qué ventajas y desventajas presenta cada unade ellas sobre la otra?.
En primer lugar debemos tener presente que los amperímetros yvoltímetros utilizados en la práctica no son instrumentos ideales, esdecir, presentan una cierta resistencia interna diferente a la quedesearíamos que tuviesen.
Un amperímetro es un instrumento que debe ir conectado enserie con los elementos del circuito donde se quiere medir la corriente,por lo tanto la resistencia interna del mismo debería ser de ceroohmios, para que no alterase la resistencia total del circuito. Sinembargo, los amperímetros reales presentan una resistencia internacuyo valor está comprendido entre algunos ohmios y algunos cientos deohmios.
Por otra parte, un voltímetro es un instrumento que debe ir co-nectado en paralelo con los elementos del circuito entre cuyosterminales quiere determinarse el voltaje, por lo tanto su resistenciainterna debería ser infinita, mientras que la resistencia interna de losvoltímetros reales está comprendida entre algunas decenas de KΩ yalgunas decenas de MΩ.
Sabiendo esto, vamos a analizar los circuitos anteriores.
7.1.1.- Primer procedimiento.
Las Figura 3 presenta el esquema circuital del primerprocedimiento haciendo resaltar la resistencia interna de cada uno de
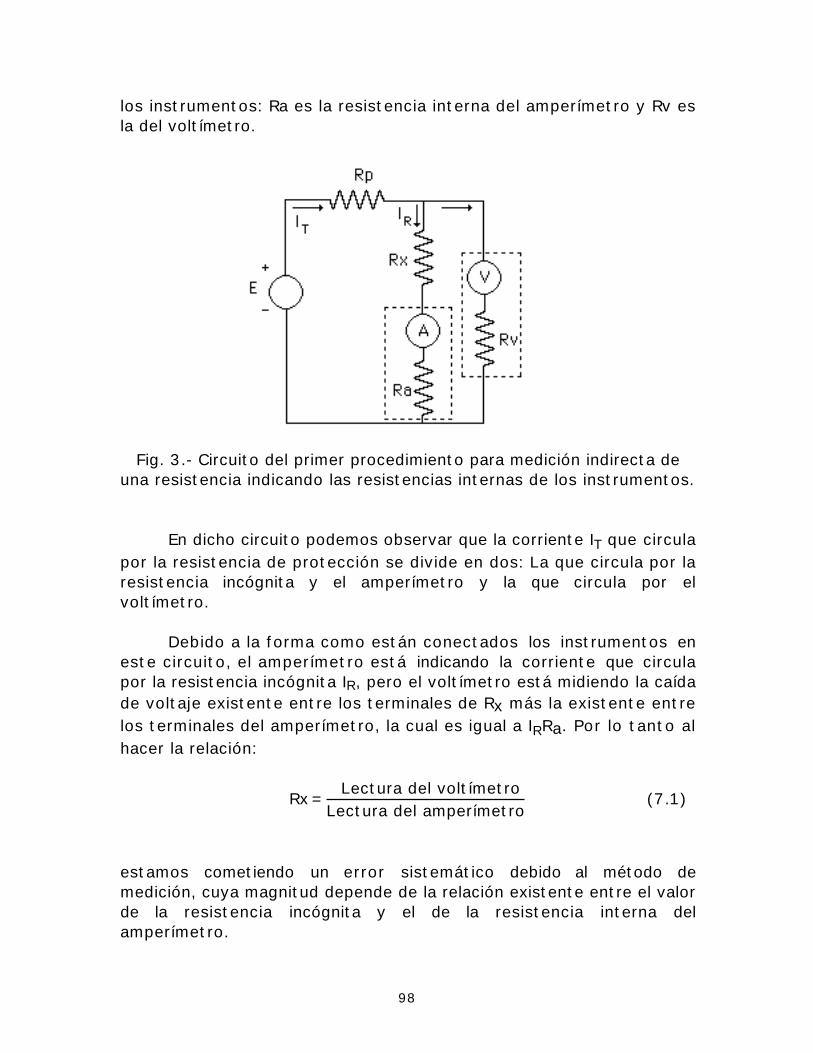
98
los instrumentos: Ra es la resistencia interna del amperímetro y Rv esla del voltímetro.
Fig. 3.- Circuito del primer procedimiento para medición indirecta deuna resistencia indicando las resistencias internas de los instrumentos.
En dicho circuito podemos observar que la corriente IT que circulapor la resistencia de protección se divide en dos: La que circula por laresistencia incógnita y el amperímetro y la que circula por elvoltímetro.
Debido a la forma como están conectados los instrumentos eneste circuito, el amperímetro está indicando la corriente que circulapor la resistencia incógnita IR, pero el voltímetro está midiendo la caídade voltaje existente entre los terminales de Rx más la existente entrelos terminales del amperímetro, la cual es igual a IRRa. Por lo tanto alhacer la relación:
Rx =
Lectura del voltímetroLectura del amperímetro
(7.1)
estamos cometiendo un error sistemático debido al método demedición, cuya magnitud depende de la relación existente entre el valorde la resistencia incógnita y el de la resistencia interna delamperímetro.
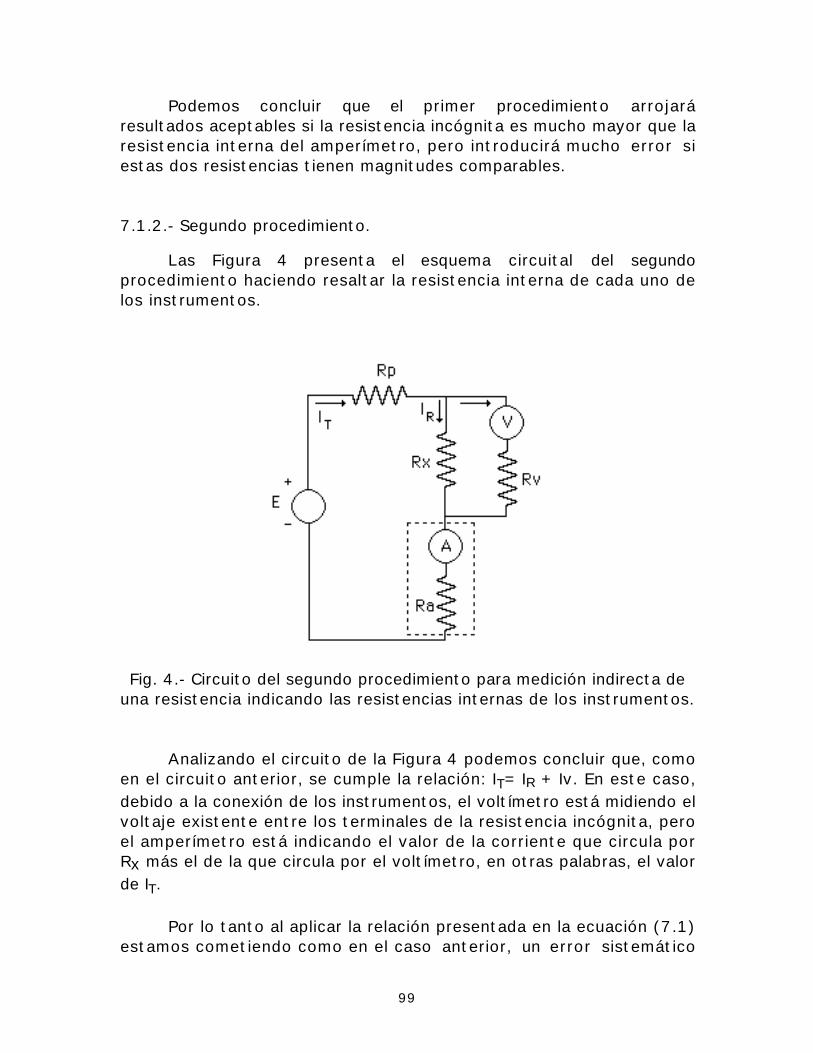
99
Podemos concluir que el primer procedimiento arrojaráresultados aceptables si la resistencia incógnita es mucho mayor que laresistencia interna del amperímetro, pero introducirá mucho error siestas dos resistencias tienen magnitudes comparables.
7.1.2.- Segundo procedimiento.
Las Figura 4 presenta el esquema circuital del segundoprocedimiento haciendo resaltar la resistencia interna de cada uno delos instrumentos.
Fig. 4.- Circuito del segundo procedimiento para medición indirecta deuna resistencia indicando las resistencias internas de los instrumentos.
Analizando el circuito de la Figura 4 podemos concluir que, comoen el circuito anterior, se cumple la relación: IT= IR + Iv. En este caso,debido a la conexión de los instrumentos, el voltímetro está midiendo elvoltaje existente entre los terminales de la resistencia incógnita, peroel amperímetro está indicando el valor de la corriente que circula porRx más el de la que circula por el voltímetro, en otras palabras, el valorde IT.
Por lo tanto al aplicar la relación presentada en la ecuación (7.1)estamos cometiendo como en el caso anterior, un error sistemático
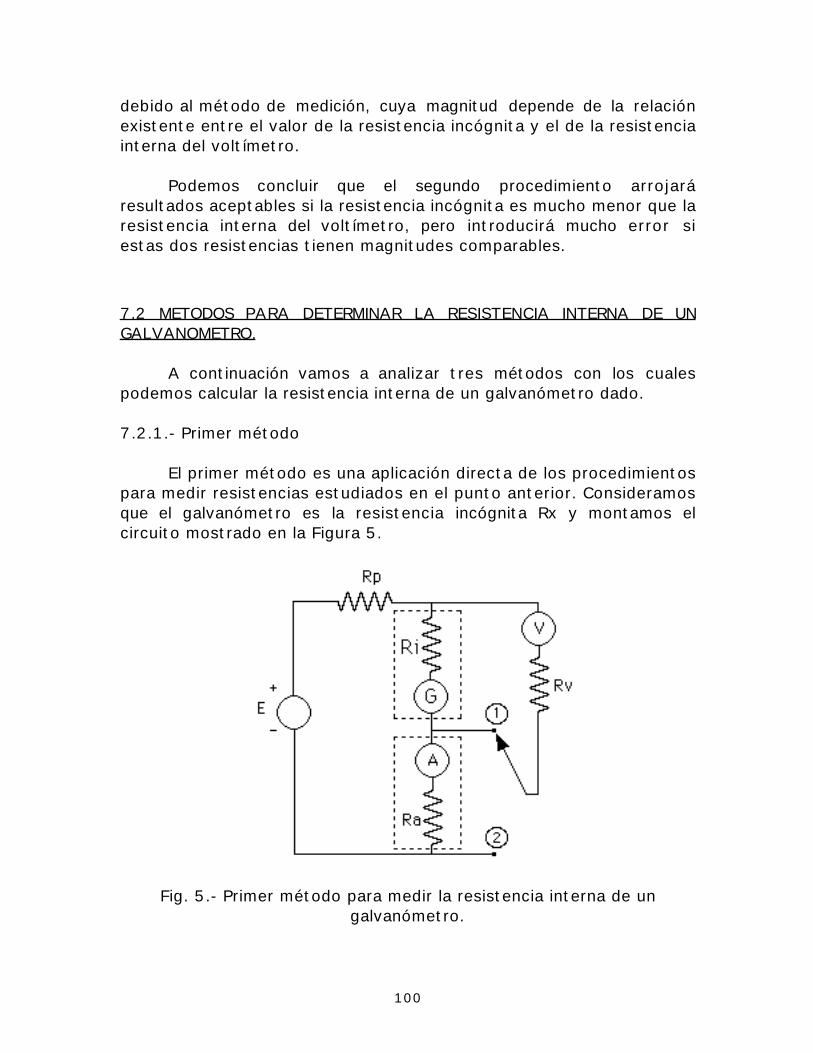
100
debido al método de medición, cuya magnitud depende de la relaciónexistente entre el valor de la resistencia incógnita y el de la resistenciainterna del voltímetro.
Podemos concluir que el segundo procedimiento arrojaráresultados aceptables si la resistencia incógnita es mucho menor que laresistencia interna del voltímetro, pero introducirá mucho error siestas dos resistencias tienen magnitudes comparables.
7.2 METODOS PARA DETERMINAR LA RESISTENCIA INTERNA DE UNGALVANOMETRO.
A continuación vamos a analizar tres métodos con los cualespodemos calcular la resistencia interna de un galvanómetro dado.
7.2.1.- Primer método
El primer método es una aplicación directa de los procedimientospara medir resistencias estudiados en el punto anterior. Consideramosque el galvanómetro es la resistencia incógnita Rx y montamos elcircuito mostrado en la Figura 5.
Fig. 5.- Primer método para medir la resistencia interna de ungalvanómetro.
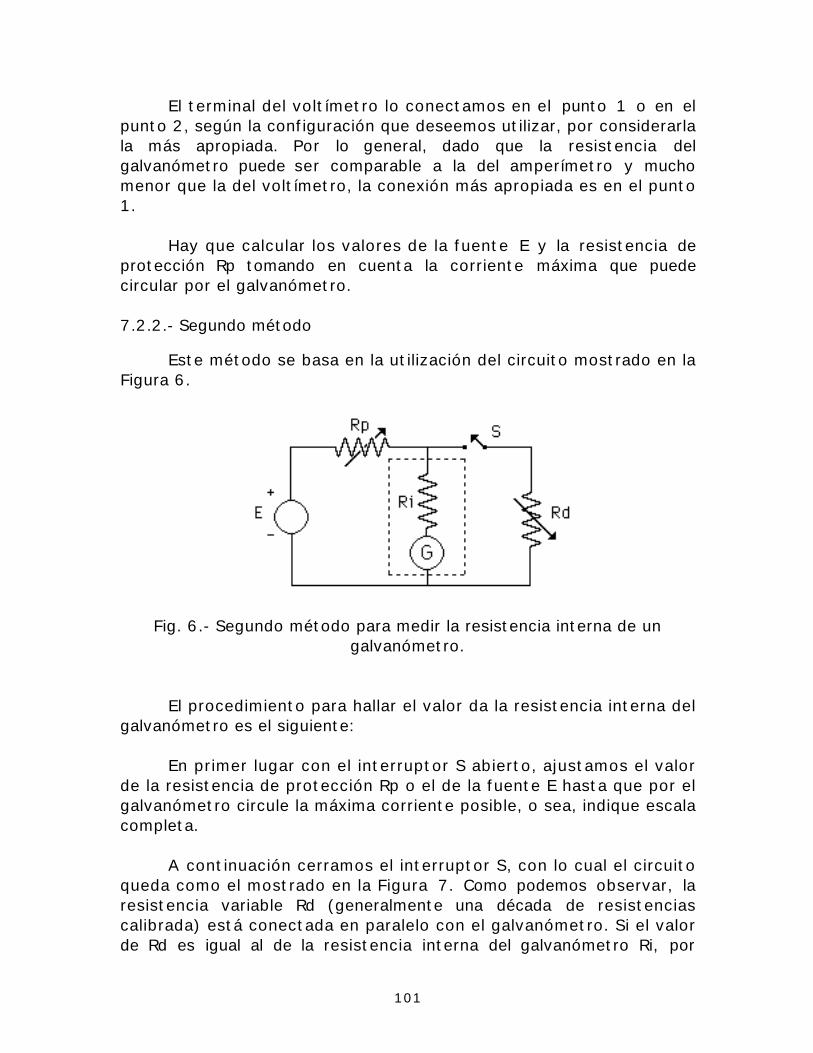
101
El terminal del voltímetro lo conectamos en el punto 1 o en elpunto 2, según la configuración que deseemos utilizar, por considerarlala más apropiada. Por lo general, dado que la resistencia delgalvanómetro puede ser comparable a la del amperímetro y muchomenor que la del voltímetro, la conexión más apropiada es en el punto1.
Hay que calcular los valores de la fuente E y la resistencia deprotección Rp tomando en cuenta la corriente máxima que puedecircular por el galvanómetro.
7.2.2.- Segundo método
Este método se basa en la utilización del circuito mostrado en laFigura 6.
Fig. 6.- Segundo método para medir la resistencia interna de ungalvanómetro.
El procedimiento para hallar el valor da la resistencia interna delgalvanómetro es el siguiente:
En primer lugar con el interruptor S abierto, ajustamos el valorde la resistencia de protección Rp o el de la fuente E hasta que por elgalvanómetro circule la máxima corriente posible, o sea, indique escalacompleta.
A continuación cerramos el interruptor S, con lo cual el circuitoqueda como el mostrado en la Figura 7. Como podemos observar, laresistencia variable Rd (generalmente una década de resistenciascalibrada) está conectada en paralelo con el galvanómetro. Si el valorde Rd es igual al de la resistencia interna del galvanómetro Ri, por
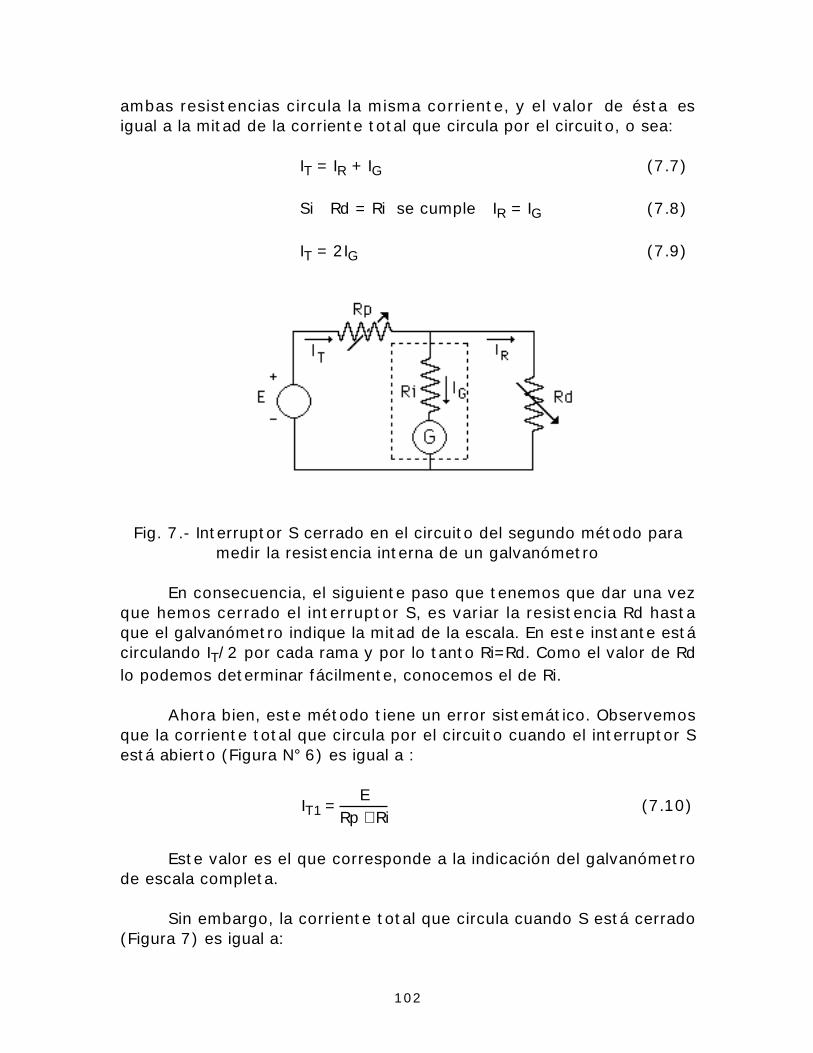
102
ambas resistencias circula la misma corriente, y el valor de ésta esigual a la mitad de la corriente total que circula por el circuito, o sea:
IT = IR + IG (7.7)
Si Rd = Ri se cumple IR = IG (7.8)
IT = 2IG (7.9)
Fig. 7.- Interruptor S cerrado en el circuito del segundo método paramedir la resistencia interna de un galvanómetro
En consecuencia, el siguiente paso que tenemos que dar una vezque hemos cerrado el interruptor S, es variar la resistencia Rd hastaque el galvanómetro indique la mitad de la escala. En este instante estácirculando IT/2 por cada rama y por lo tanto Ri=Rd. Como el valor de Rdlo podemos determinar fácilmente, conocemos el de Ri.
Ahora bien, este método tiene un error sistemático. Observemosque la corriente total que circula por el circuito cuando el interruptor Sestá abierto (Figura N° 6) es igual a :
IT1 =
ERp + Ri
(7.10)
Este valor es el que corresponde a la indicación del galvanómetrode escala completa.
Sin embargo, la corriente total que circula cuando S está cerrado(Figura 7) es igual a:
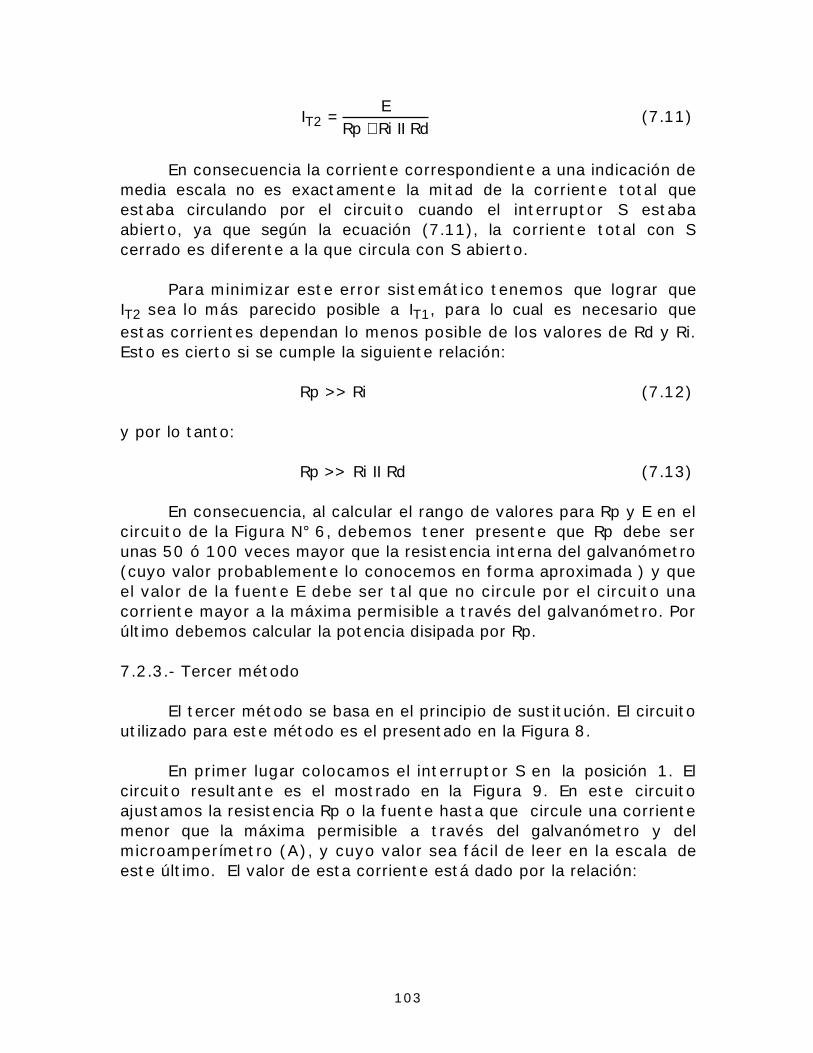
103
IT2 =
ERp + Ri II Rd
(7.11)
En consecuencia la corriente correspondiente a una indicación demedia escala no es exactamente la mitad de la corriente total queestaba circulando por el circuito cuando el interruptor S estabaabierto, ya que según la ecuación (7.11), la corriente total con Scerrado es diferente a la que circula con S abierto.
Para minimizar este error sistemático tenemos que lograr queIT2 sea lo más parecido posible a IT1, para lo cual es necesario queestas corrientes dependan lo menos posible de los valores de Rd y Ri.Esto es cierto si se cumple la siguiente relación:
Rp >> Ri (7.12)
y por lo tanto:
Rp >> Ri II Rd (7.13)
En consecuencia, al calcular el rango de valores para Rp y E en elcircuito de la Figura N° 6, debemos tener presente que Rp debe serunas 50 ó 100 veces mayor que la resistencia interna del galvanómetro(cuyo valor probablemente lo conocemos en forma aproximada ) y queel valor de la fuente E debe ser tal que no circule por el circuito unacorriente mayor a la máxima permisible a través del galvanómetro. Porúltimo debemos calcular la potencia disipada por Rp.
7.2.3.- Tercer método
El tercer método se basa en el principio de sustitución. El circuitoutilizado para este método es el presentado en la Figura 8.
En primer lugar colocamos el interruptor S en la posición 1. Elcircuito resultante es el mostrado en la Figura 9. En este circuitoajustamos la resistencia Rp o la fuente hasta que circule una corrientemenor que la máxima permisible a través del galvanómetro y delmicroamperímetro (A), y cuyo valor sea fácil de leer en la escala deeste último. El valor de esta corriente está dado por la relación:
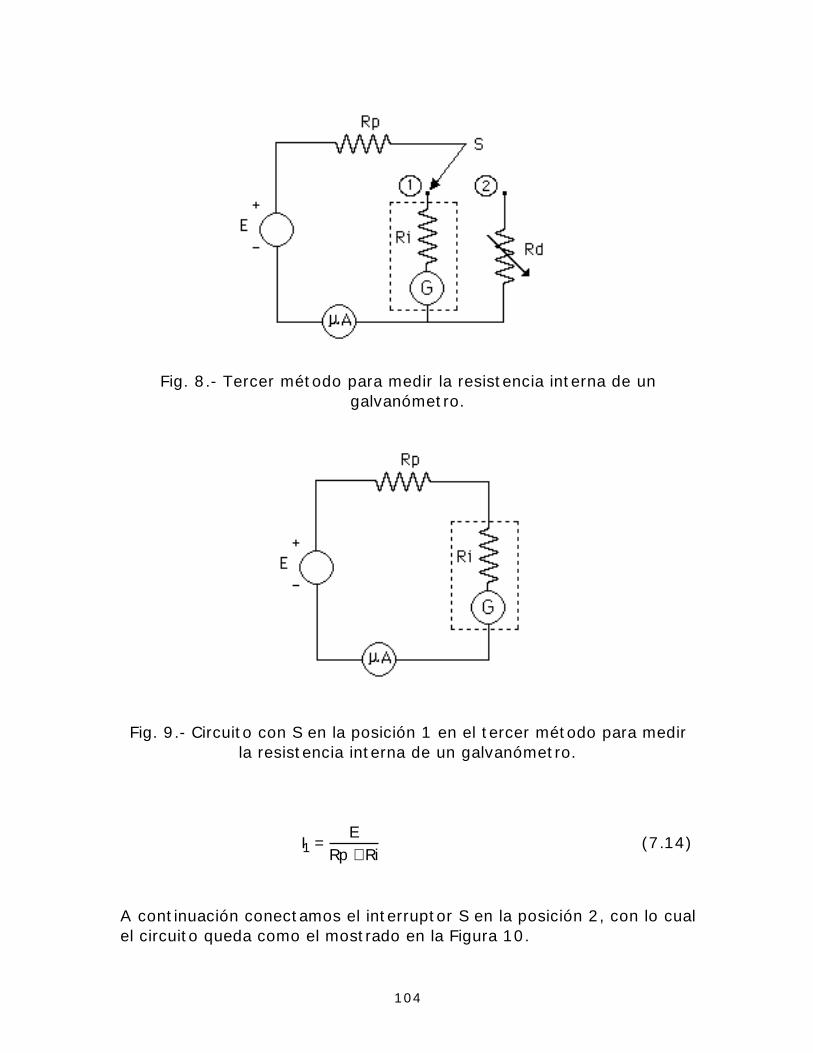
104
Fig. 8.- Tercer método para medir la resistencia interna de ungalvanómetro.
Fig. 9.- Circuito con S en la posición 1 en el tercer método para medirla resistencia interna de un galvanómetro.
I1 =
ERp + Ri
(7.14)
A continuación conectamos el interruptor S en la posición 2, con lo cualel circuito queda como el mostrado en la Figura 10.
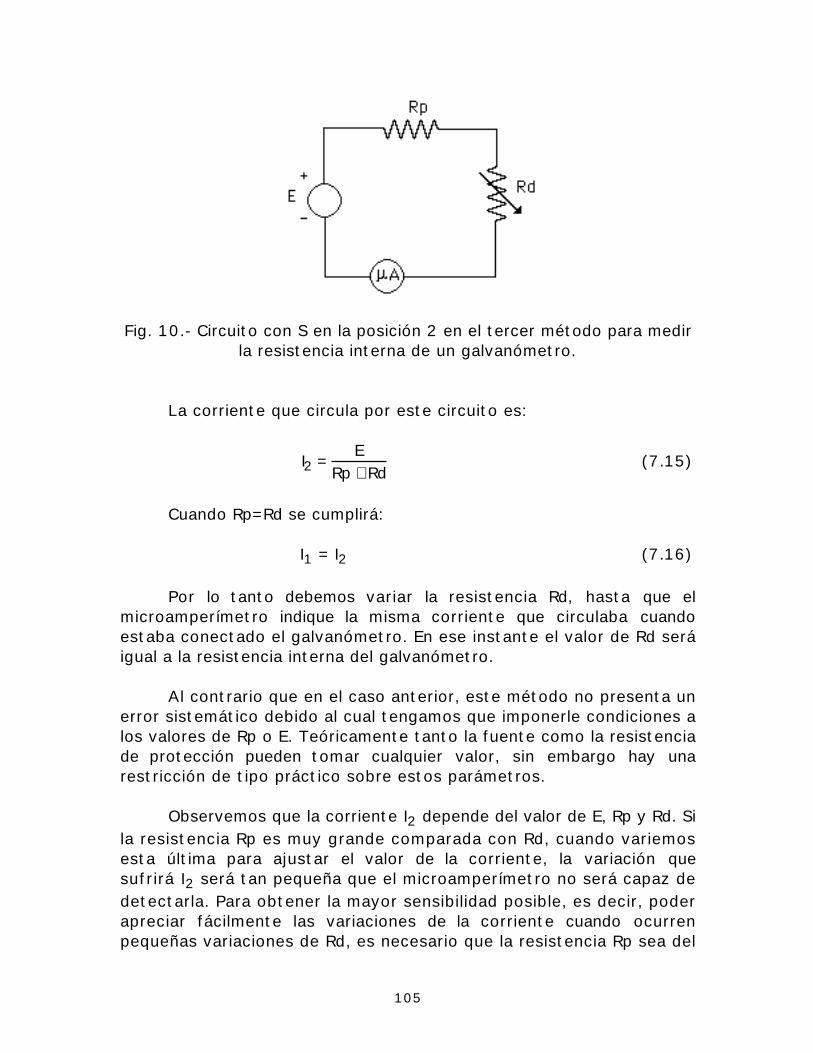
105
Fig. 10.- Circuito con S en la posición 2 en el tercer método para medirla resistencia interna de un galvanómetro.
La corriente que circula por este circuito es:
I2 =
ERp + Rd
(7.15)
Cuando Rp=Rd se cumplirá:
I1 = I2 (7.16)
Por lo tanto debemos variar la resistencia Rd, hasta que elmicroamperímetro indique la misma corriente que circulaba cuandoestaba conectado el galvanómetro. En ese instante el valor de Rd seráigual a la resistencia interna del galvanómetro.
Al contrario que en el caso anterior, este método no presenta unerror sistemático debido al cual tengamos que imponerle condiciones alos valores de Rp o E. Teóricamente tanto la fuente como la resistenciade protección pueden tomar cualquier valor, sin embargo hay unarestricción de tipo práctico sobre estos parámetros.
Observemos que la corriente I2 depende del valor de E, Rp y Rd. Sila resistencia Rp es muy grande comparada con Rd, cuando variemosesta última para ajustar el valor de la corriente, la variación quesufrirá I2 será tan pequeña que el microamperímetro no será capaz dedetectarla. Para obtener la mayor sensibilidad posible, es decir, poderapreciar fácilmente las variaciones de la corriente cuando ocurrenpequeñas variaciones de Rd, es necesario que la resistencia Rp sea del

106
mismo orden de magnitud que Rd, o menor si esto es posible. Estehecho lo debemos tener muy en cuenta al calcular los valores de Rp y E.
Una vez que hemos establecido cual debe ser el valor de Rptenemos que calcular el de E para que la corriente que circule por elcircuito no exceda la máxima permitida a través del galvanómetro y delmicroamperímetro.
Finalmente tenemos que calcular la potencia disipada por Rp y laresistencia variable para seleccionar los componentes adecuados.
107
CAPITULO VIII
EL OSCILOSCOPIO
8.1 INTRODUCCION.
En la historia de las mediciones eléctricas y electrónicas, elinstrumento que ha producido mayor impacto ha sido el osciloscopio,debido a que es de utilidad no solamente para medir algunas variablesde los fenómenos eléctricos (voltaje, corriente, frecuencia, período,etc.), mediciones que son posible realizar con otro tipo deinstrumentos, sino que también permite observar el desarrollo en eltiempo de dichos fenómenos eléctricos, con lo cual se pueden conocery estudiar en forma más detallada. Debido a esto, el osciloscopio siguesiendo uno de los instrumentos de mayor aplicación en el trabajo diario.
8.2 PARTES FUNDAMENTALES DE UN OSCILOSCOPIO.
Las partes fundamentales de un osciloscopio son:
- El tubo de rayos catódicos (TRC)
- El amplificador vertical
- La base de tiempo
- El circuito de disparo (Trigger)
- El amplificador horizontal
- El amplificador de control de intensidad (Gate amplifier)
- La línea de retardo
La Figura 1 presenta el Diagrama de Bloques de un osciloscopiobásico. En los siguientes puntos vamos a estudiar cada uno de dichosbloques.
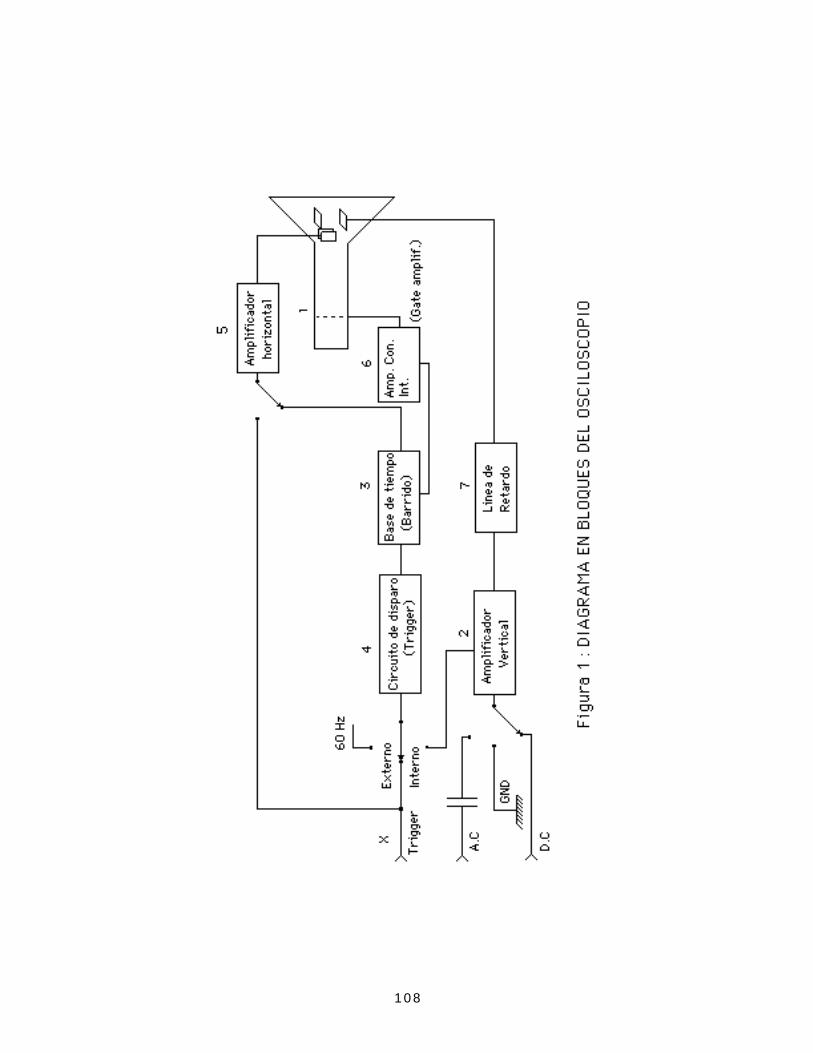
108
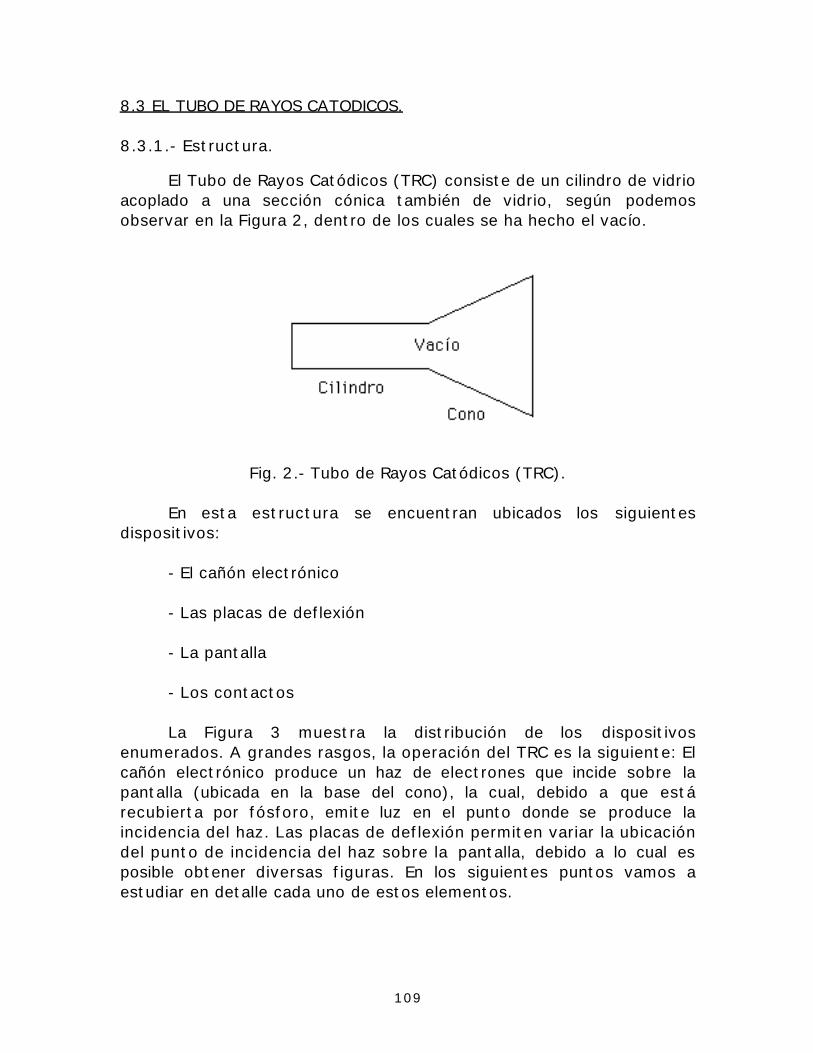
109
8.3 EL TUBO DE RAYOS CATODICOS.
8.3.1.- Estructura.
El Tubo de Rayos Catódicos (TRC) consiste de un cilindro de vidrioacoplado a una sección cónica también de vidrio, según podemosobservar en la Figura 2, dentro de los cuales se ha hecho el vacío.
Fig. 2.- Tubo de Rayos Catódicos (TRC).
En esta estructura se encuentran ubicados los siguientesdispositivos:
- El cañón electrónico
- Las placas de deflexión
- La pantalla
- Los contactos
La Figura 3 muestra la distribución de los dispositivosenumerados. A grandes rasgos, la operación del TRC es la siguiente: Elcañón electrónico produce un haz de electrones que incide sobre lapantalla (ubicada en la base del cono), la cual, debido a que estárecubierta por fósforo, emite luz en el punto donde se produce laincidencia del haz. Las placas de deflexión permiten variar la ubicacióndel punto de incidencia del haz sobre la pantalla, debido a lo cual esposible obtener diversas figuras. En los siguientes puntos vamos aestudiar en detalle cada uno de estos elementos.
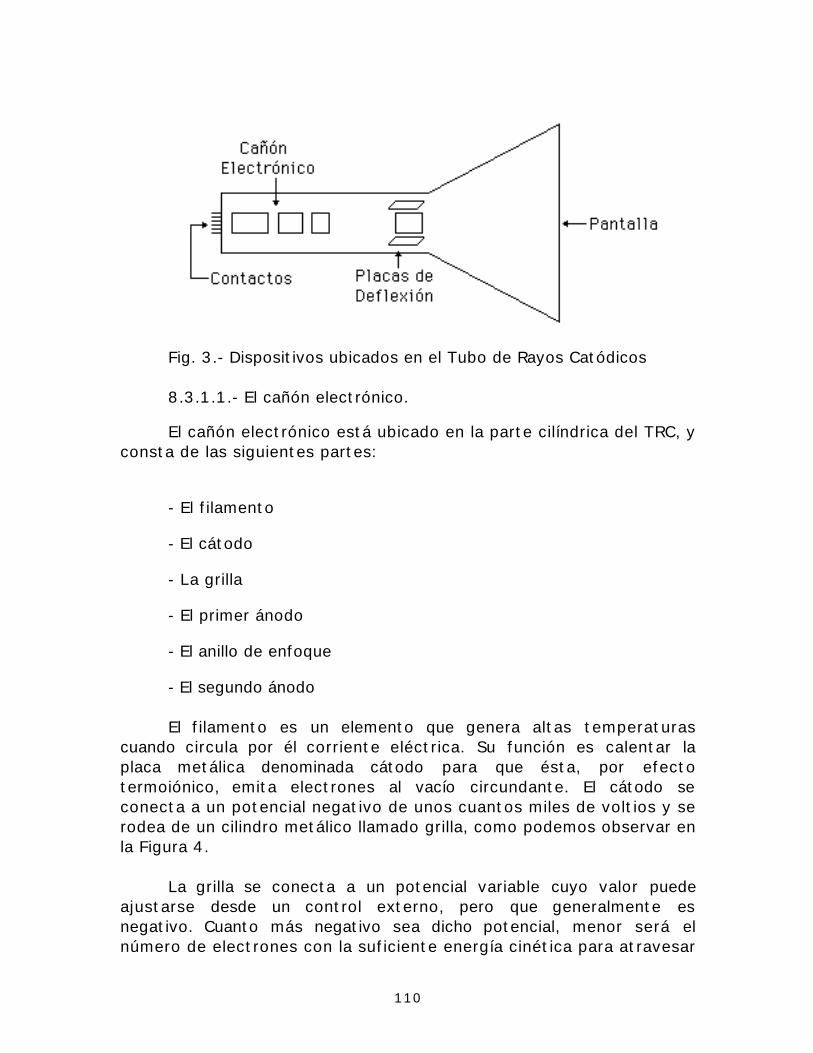
110
Fig. 3.- Dispositivos ubicados en el Tubo de Rayos Catódicos
8.3.1.1.- El cañón electrónico.
El cañón electrónico está ubicado en la parte cilíndrica del TRC, yconsta de las siguientes partes:
- El filamento
- El cátodo
- La grilla
- El primer ánodo
- El anillo de enfoque
- El segundo ánodo
El filamento es un elemento que genera altas temperaturascuando circula por él corriente eléctrica. Su función es calentar laplaca metálica denominada cátodo para que ésta, por efectotermoiónico, emita electrones al vacío circundante. El cátodo seconecta a un potencial negativo de unos cuantos miles de voltios y serodea de un cilindro metálico llamado grilla, como podemos observar enla Figura 4.
La grilla se conecta a un potencial variable cuyo valor puedeajustarse desde un control externo, pero que generalmente esnegativo. Cuanto más negativo sea dicho potencial, menor será elnúmero de electrones con la suficiente energía cinética para atravesar
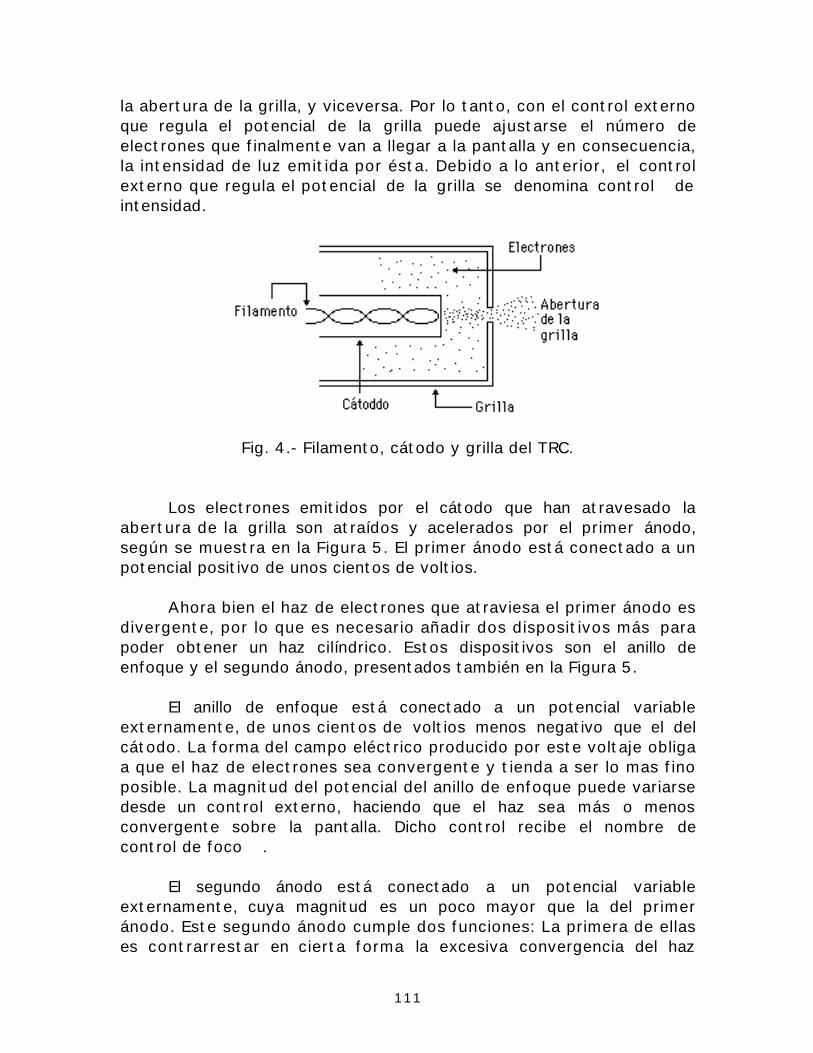
111
la abertura de la grilla, y viceversa. Por lo tanto, con el control externoque regula el potencial de la grilla puede ajustarse el número deelectrones que finalmente van a llegar a la pantalla y en consecuencia,la intensidad de luz emitida por ésta. Debido a lo anterior, el controlexterno que regula el potencial de la grilla se denomina control deintensidad.
Fig. 4.- Filamento, cátodo y grilla del TRC.
Los electrones emitidos por el cátodo que han atravesado laabertura de la grilla son atraídos y acelerados por el primer ánodo,según se muestra en la Figura 5. El primer ánodo está conectado a unpotencial positivo de unos cientos de voltios.
Ahora bien el haz de electrones que atraviesa el primer ánodo esdivergente, por lo que es necesario añadir dos dispositivos más parapoder obtener un haz cilíndrico. Estos dispositivos son el anillo deenfoque y el segundo ánodo, presentados también en la Figura 5.
El anillo de enfoque está conectado a un potencial variableexternamente, de unos cientos de voltios menos negativo que el delcátodo. La forma del campo eléctrico producido por este voltaje obligaa que el haz de electrones sea convergente y tienda a ser lo mas finoposible. La magnitud del potencial del anillo de enfoque puede variarsedesde un control externo, haciendo que el haz sea más o menosconvergente sobre la pantalla. Dicho control recibe el nombre decontrol de foco .
El segundo ánodo está conectado a un potencial variableexternamente, cuya magnitud es un poco mayor que la del primeránodo. Este segundo ánodo cumple dos funciones: La primera de ellases contrarrestar en cierta forma la excesiva convergencia del haz
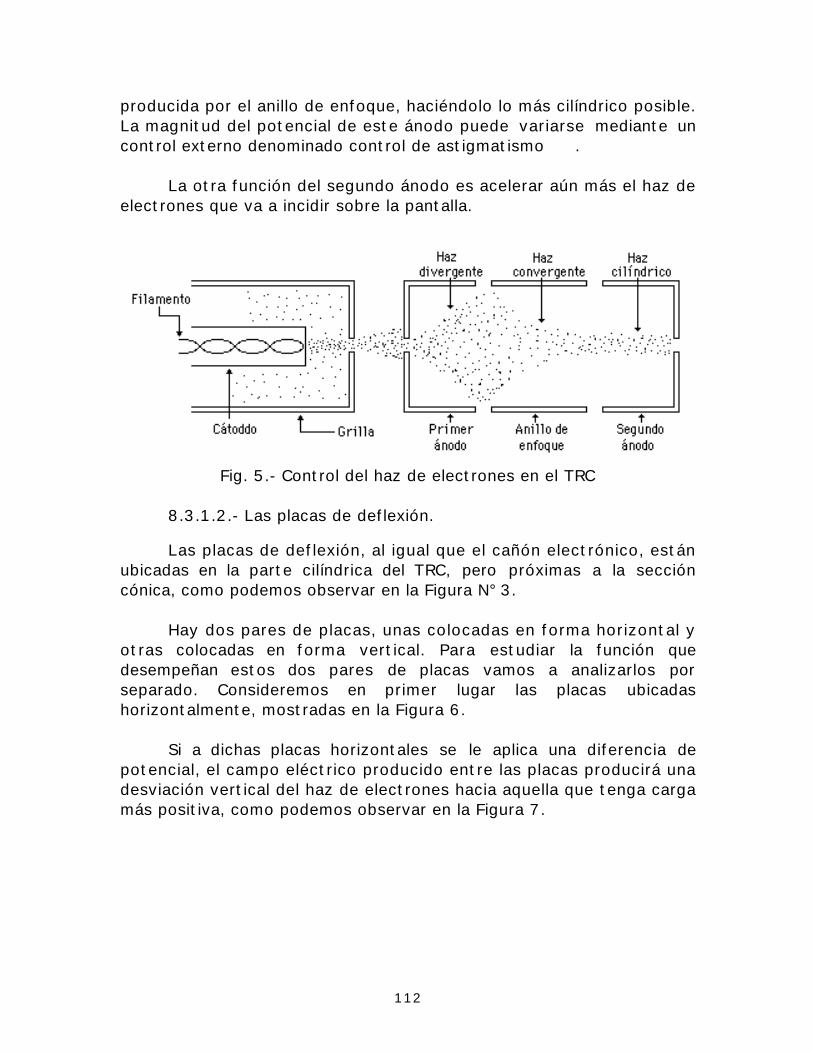
112
producida por el anillo de enfoque, haciéndolo lo más cilíndrico posible.La magnitud del potencial de este ánodo puede variarse mediante uncontrol externo denominado control de astigmatismo .
La otra función del segundo ánodo es acelerar aún más el haz deelectrones que va a incidir sobre la pantalla.
Fig. 5.- Control del haz de electrones en el TRC
8.3.1.2.- Las placas de deflexión.
Las placas de deflexión, al igual que el cañón electrónico, estánubicadas en la parte cilíndrica del TRC, pero próximas a la seccióncónica, como podemos observar en la Figura N° 3.
Hay dos pares de placas, unas colocadas en forma horizontal yotras colocadas en forma vertical. Para estudiar la función quedesempeñan estos dos pares de placas vamos a analizarlos porseparado. Consideremos en primer lugar las placas ubicadashorizontalmente, mostradas en la Figura 6.
Si a dichas placas horizontales se le aplica una diferencia depotencial, el campo eléctrico producido entre las placas producirá unadesviación vertical del haz de electrones hacia aquella que tenga cargamás positiva, como podemos observar en la Figura 7.
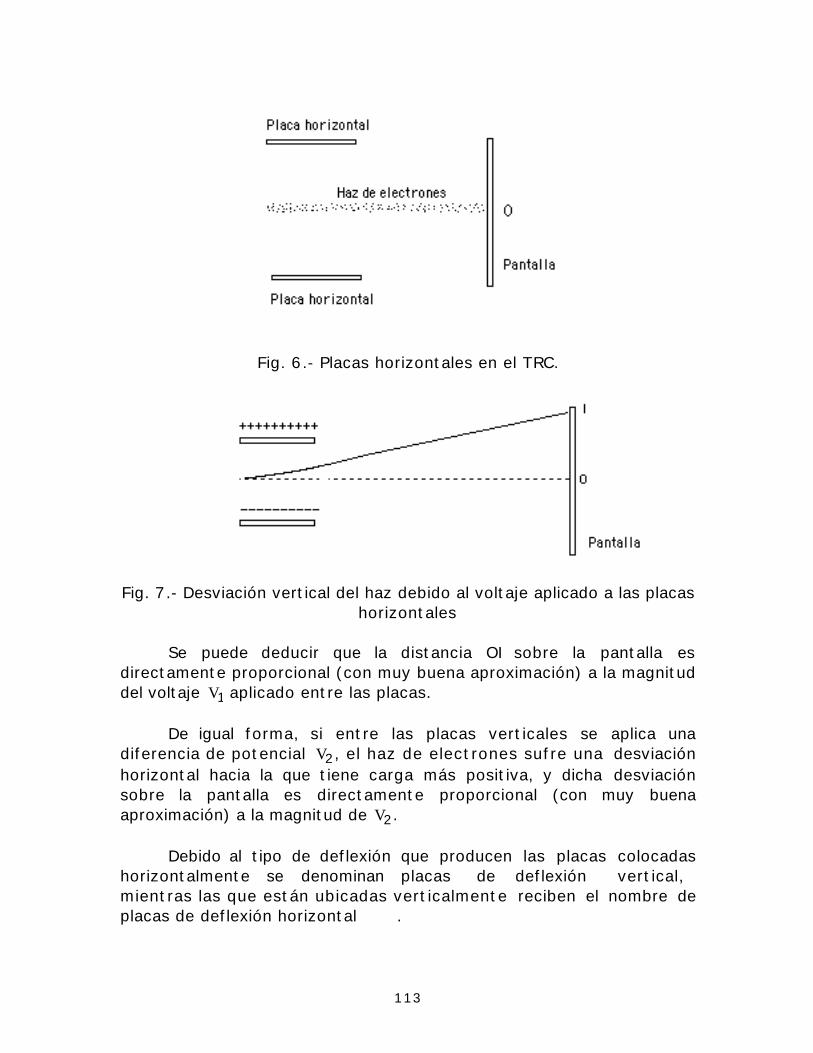
113
Fig. 6.- Placas horizontales en el TRC.
Fig. 7.- Desviación vertical del haz debido al voltaje aplicado a las placashorizontales
Se puede deducir que la distancia OI sobre la pantalla esdirectamente proporcional (con muy buena aproximación) a la magnituddel voltaje V1 aplicado entre las placas.
De igual forma, si entre las placas verticales se aplica unadiferencia de potencial V2, el haz de electrones sufre una desviaciónhorizontal hacia la que tiene carga más positiva, y dicha desviaciónsobre la pantalla es directamente proporcional (con muy buenaaproximación) a la magnitud de V2.
Debido al tipo de deflexión que producen las placas colocadashorizontalmente se denominan placas de deflexión vertical,mientras las que están ubicadas verticalmente reciben el nombre deplacas de deflexión horizontal .
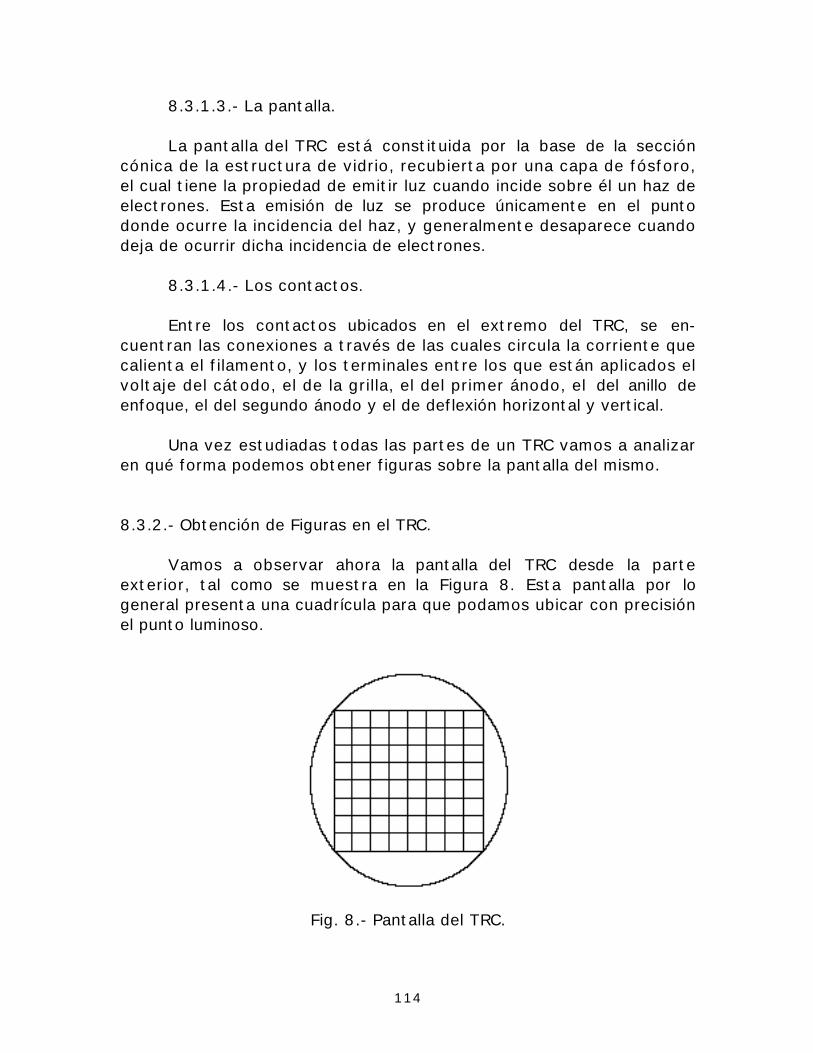
114
8.3.1.3.- La pantalla.
La pantalla del TRC está constituida por la base de la seccióncónica de la estructura de vidrio, recubierta por una capa de fósforo,el cual tiene la propiedad de emitir luz cuando incide sobre él un haz deelectrones. Esta emisión de luz se produce únicamente en el puntodonde ocurre la incidencia del haz, y generalmente desaparece cuandodeja de ocurrir dicha incidencia de electrones.
8.3.1.4.- Los contactos.
Entre los contactos ubicados en el extremo del TRC, se en-cuentran las conexiones a través de las cuales circula la corriente quecalienta el filamento, y los terminales entre los que están aplicados elvoltaje del cátodo, el de la grilla, el del primer ánodo, el del anillo deenfoque, el del segundo ánodo y el de deflexión horizontal y vertical.
Una vez estudiadas todas las partes de un TRC vamos a analizaren qué forma podemos obtener figuras sobre la pantalla del mismo.
8.3.2.- Obtención de Figuras en el TRC.
Vamos a observar ahora la pantalla del TRC desde la parteexterior, tal como se muestra en la Figura 8. Esta pantalla por logeneral presenta una cuadrícula para que podamos ubicar con precisiónel punto luminoso.
Fig. 8.- Pantalla del TRC.
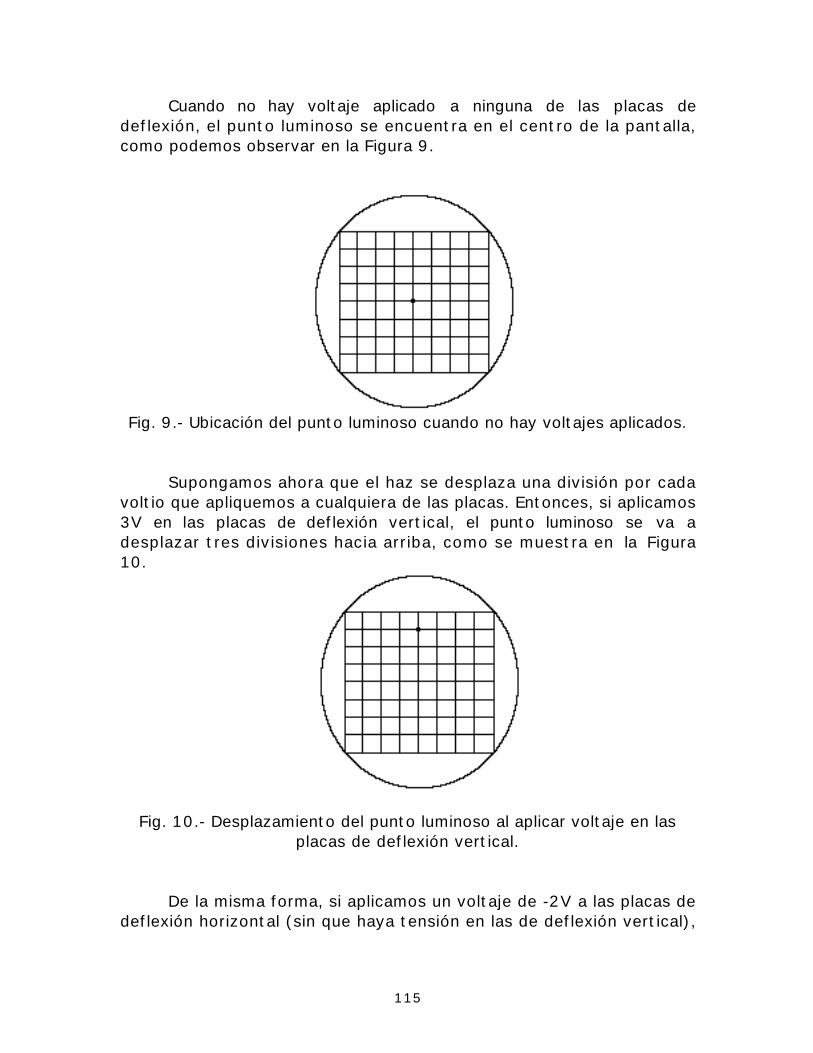
115
Cuando no hay voltaje aplicado a ninguna de las placas dedeflexión, el punto luminoso se encuentra en el centro de la pantalla,como podemos observar en la Figura 9.
Fig. 9.- Ubicación del punto luminoso cuando no hay voltajes aplicados.
Supongamos ahora que el haz se desplaza una división por cadavoltio que apliquemos a cualquiera de las placas. Entonces, si aplicamos3V en las placas de deflexión vertical, el punto luminoso se va adesplazar tres divisiones hacia arriba, como se muestra en la Figura10.
Fig. 10.- Desplazamiento del punto luminoso al aplicar voltaje en lasplacas de deflexión vertical.
De la misma forma, si aplicamos un voltaje de -2V a las placas dedeflexión horizontal (sin que haya tensión en las de deflexión vertical),
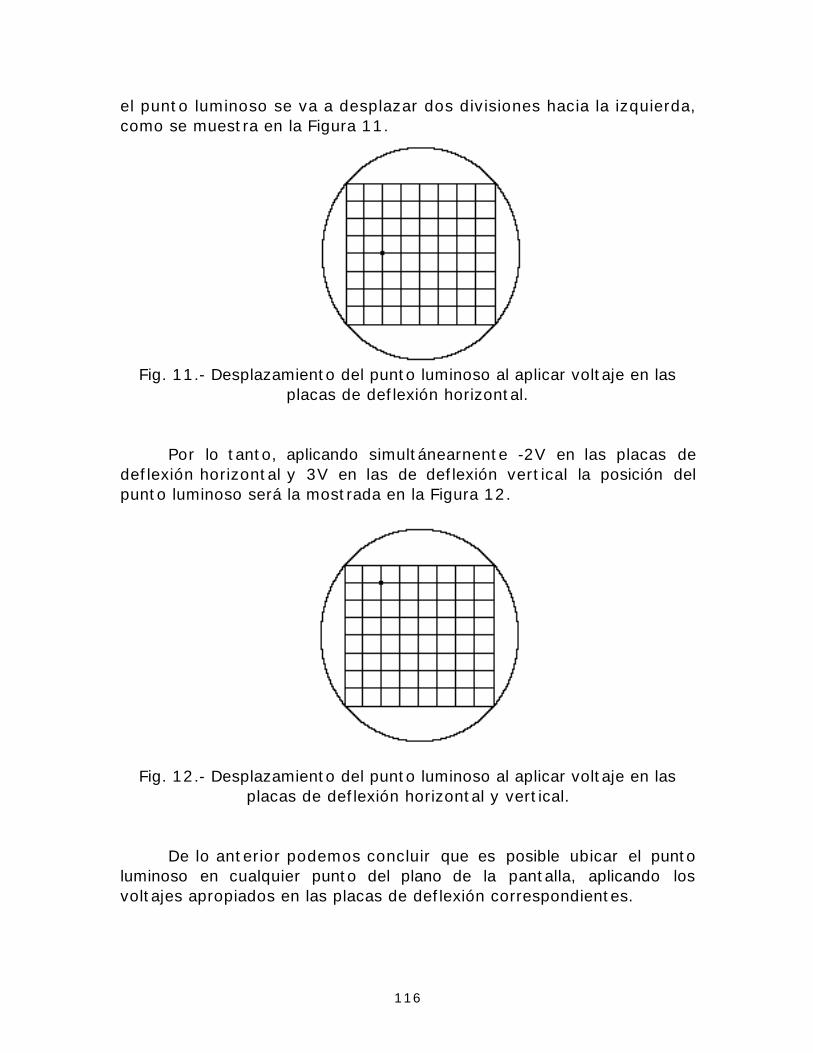
116
el punto luminoso se va a desplazar dos divisiones hacia la izquierda,como se muestra en la Figura 11.
Fig. 11.- Desplazamiento del punto luminoso al aplicar voltaje en lasplacas de deflexión horizontal.
Por lo tanto, aplicando simultánearnente -2V en las placas dedeflexión horizontal y 3V en las de deflexión vertical la posición delpunto luminoso será la mostrada en la Figura 12.
Fig. 12.- Desplazamiento del punto luminoso al aplicar voltaje en lasplacas de deflexión horizontal y vertical.
De lo anterior podemos concluir que es posible ubicar el puntoluminoso en cualquier punto del plano de la pantalla, aplicando losvoltajes apropiados en las placas de deflexión correspondientes.
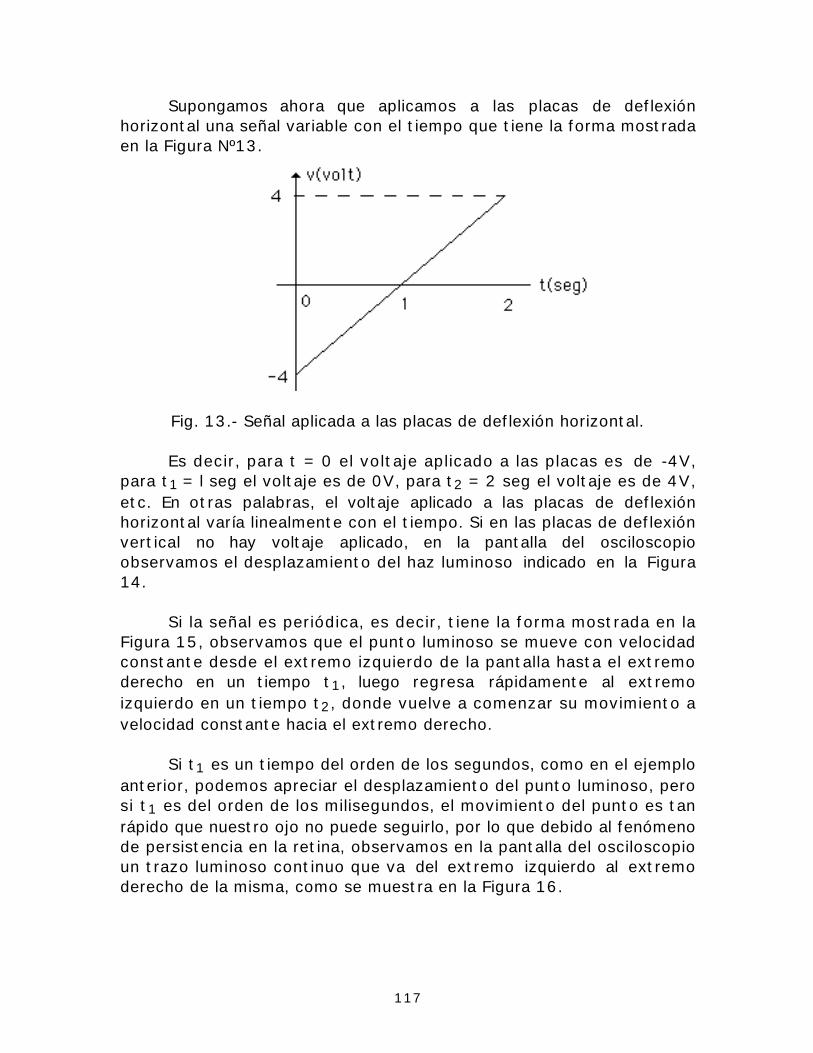
117
Supongamos ahora que aplicamos a las placas de deflexiónhorizontal una señal variable con el tiempo que tiene la forma mostradaen la Figura Nº13.
Fig. 13.- Señal aplicada a las placas de deflexión horizontal.
Es decir, para t = 0 el voltaje aplicado a las placas es de -4V,para t1 = l seg el voltaje es de 0V, para t2 = 2 seg el voltaje es de 4V,etc. En otras palabras, el voltaje aplicado a las placas de deflexiónhorizontal varía linealmente con el tiempo. Si en las placas de deflexiónvertical no hay voltaje aplicado, en la pantalla del osciloscopioobservamos el desplazamiento del haz luminoso indicado en la Figura14.
Si la señal es periódica, es decir, tiene la forma mostrada en laFigura 15, observamos que el punto luminoso se mueve con velocidadconstante desde el extremo izquierdo de la pantalla hasta el extremoderecho en un tiempo t1, luego regresa rápidamente al extremoizquierdo en un tiempo t2, donde vuelve a comenzar su movimiento avelocidad constante hacia el extremo derecho.
Si t1 es un tiempo del orden de los segundos, como en el ejemploanterior, podemos apreciar el desplazamiento del punto luminoso, perosi t1 es del orden de los milisegundos, el movimiento del punto es tanrápido que nuestro ojo no puede seguirlo, por lo que debido al fenómenode persistencia en la retina, observamos en la pantalla del osciloscopioun trazo luminoso continuo que va del extremo izquierdo al extremoderecho de la misma, como se muestra en la Figura 16.
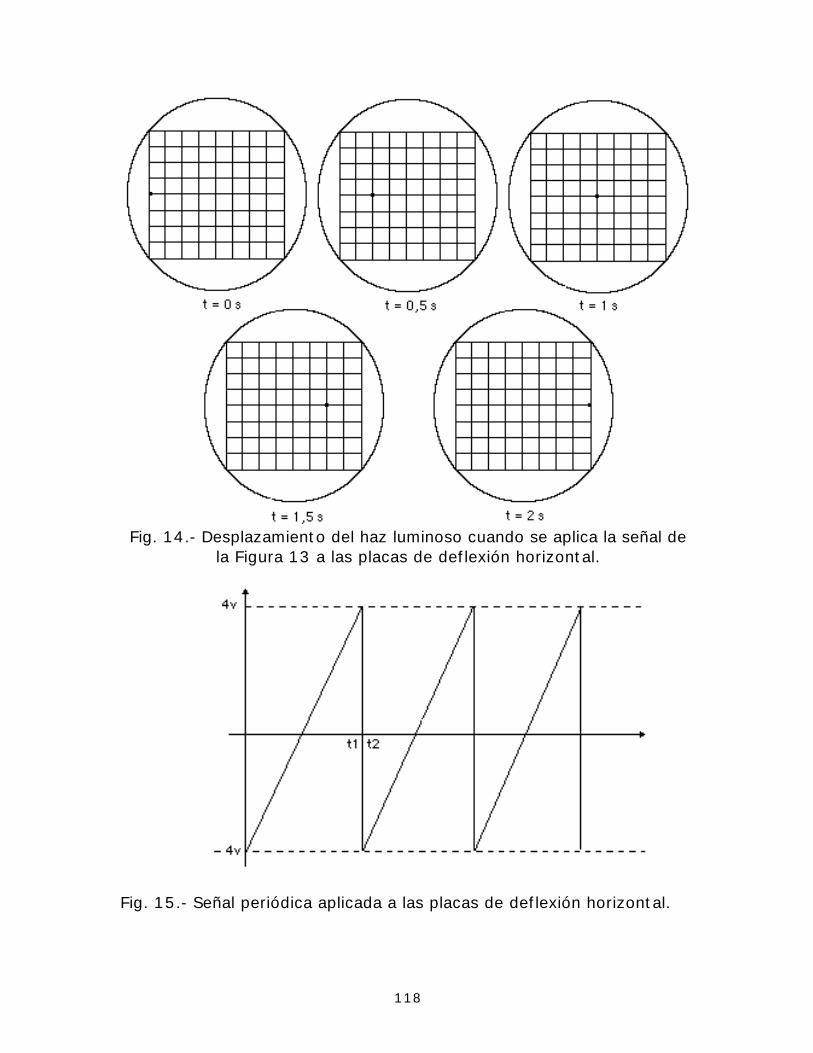
118
Fig. 14.- Desplazamiento del haz luminoso cuando se aplica la señal dela Figura 13 a las placas de deflexión horizontal.
Fig. 15.- Señal periódica aplicada a las placas de deflexión horizontal.
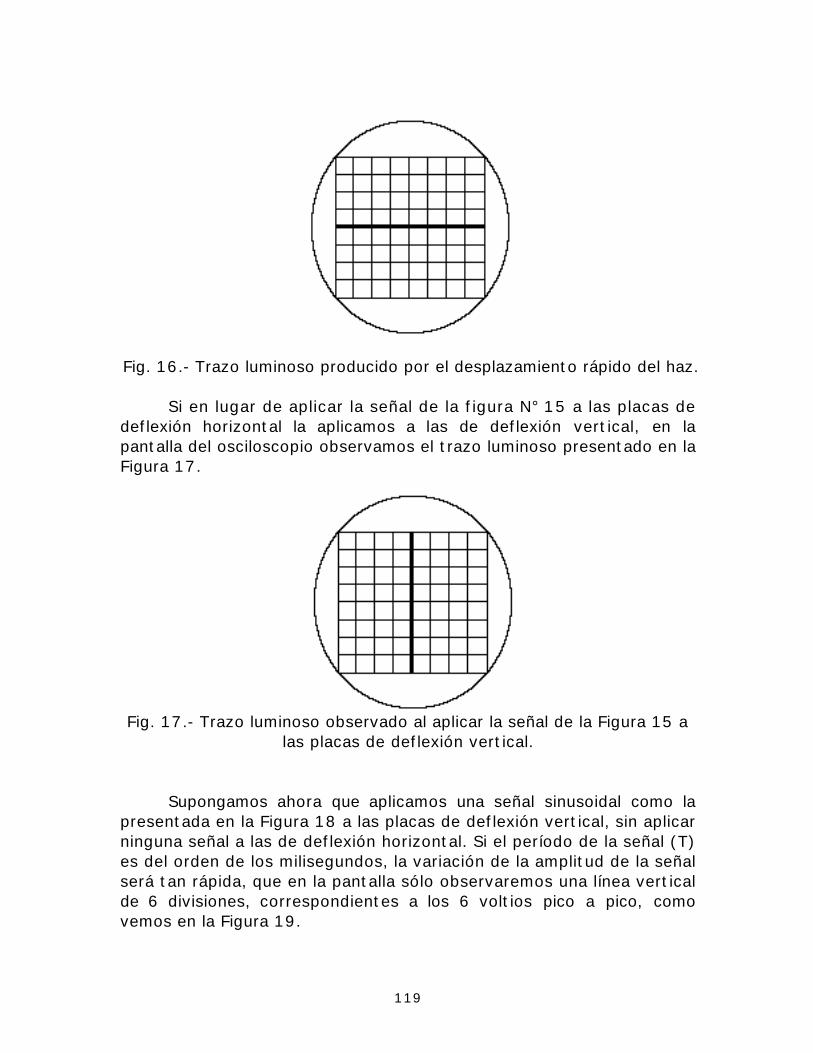
119
Fig. 16.- Trazo luminoso producido por el desplazamiento rápido del haz.
Si en lugar de aplicar la señal de la figura N° 15 a las placas dedeflexión horizontal la aplicamos a las de deflexión vertical, en lapantalla del osciloscopio observamos el trazo luminoso presentado en laFigura 17.
Fig. 17.- Trazo luminoso observado al aplicar la señal de la Figura 15 alas placas de deflexión vertical.
Supongamos ahora que aplicamos una señal sinusoidal como lapresentada en la Figura 18 a las placas de deflexión vertical, sin aplicarninguna señal a las de deflexión horizontal. Si el período de la señal (T)es del orden de los milisegundos, la variación de la amplitud de la señalserá tan rápida, que en la pantalla sólo observaremos una línea verticalde 6 divisiones, correspondientes a los 6 voltios pico a pico, comovemos en la Figura 19.
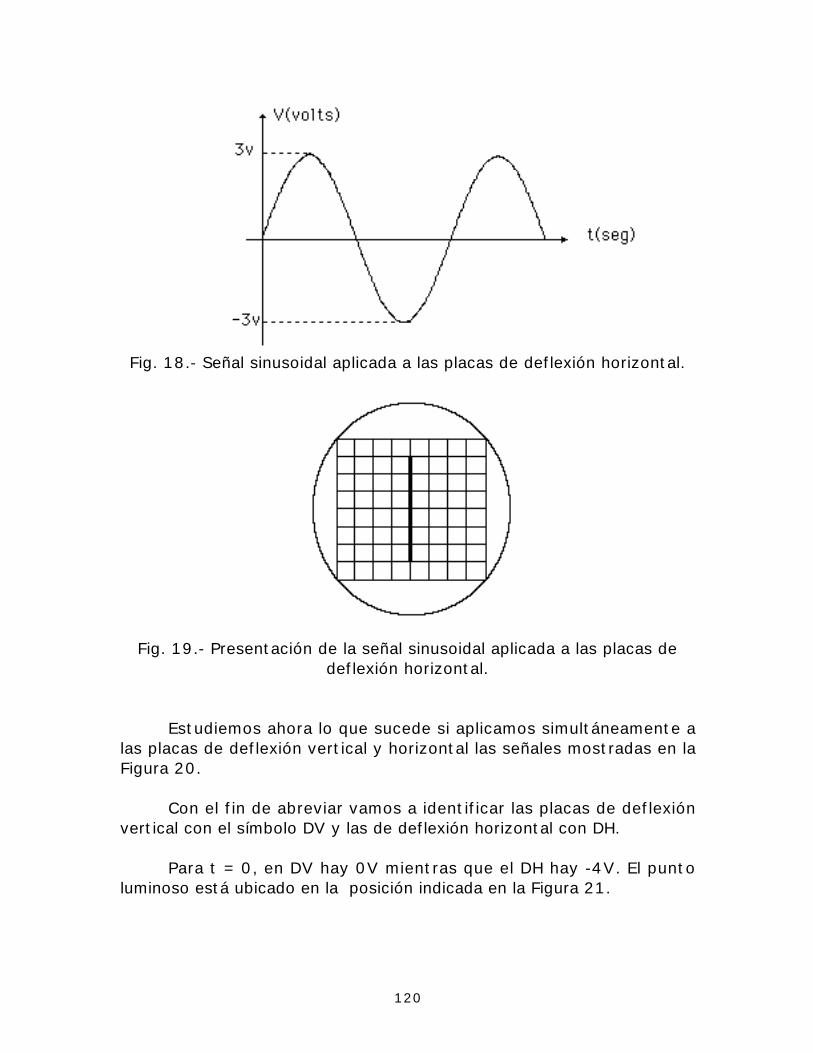
120
Fig. 18.- Señal sinusoidal aplicada a las placas de deflexión horizontal.
Fig. 19.- Presentación de la señal sinusoidal aplicada a las placas dedeflexión horizontal.
Estudiemos ahora lo que sucede si aplicamos simultáneamente alas placas de deflexión vertical y horizontal las señales mostradas en laFigura 20.
Con el fin de abreviar vamos a identificar las placas de deflexiónvertical con el símbolo DV y las de deflexión horizontal con DH.
Para t = 0, en DV hay 0V mientras que el DH hay -4V. El puntoluminoso está ubicado en la posición indicada en la Figura 21.
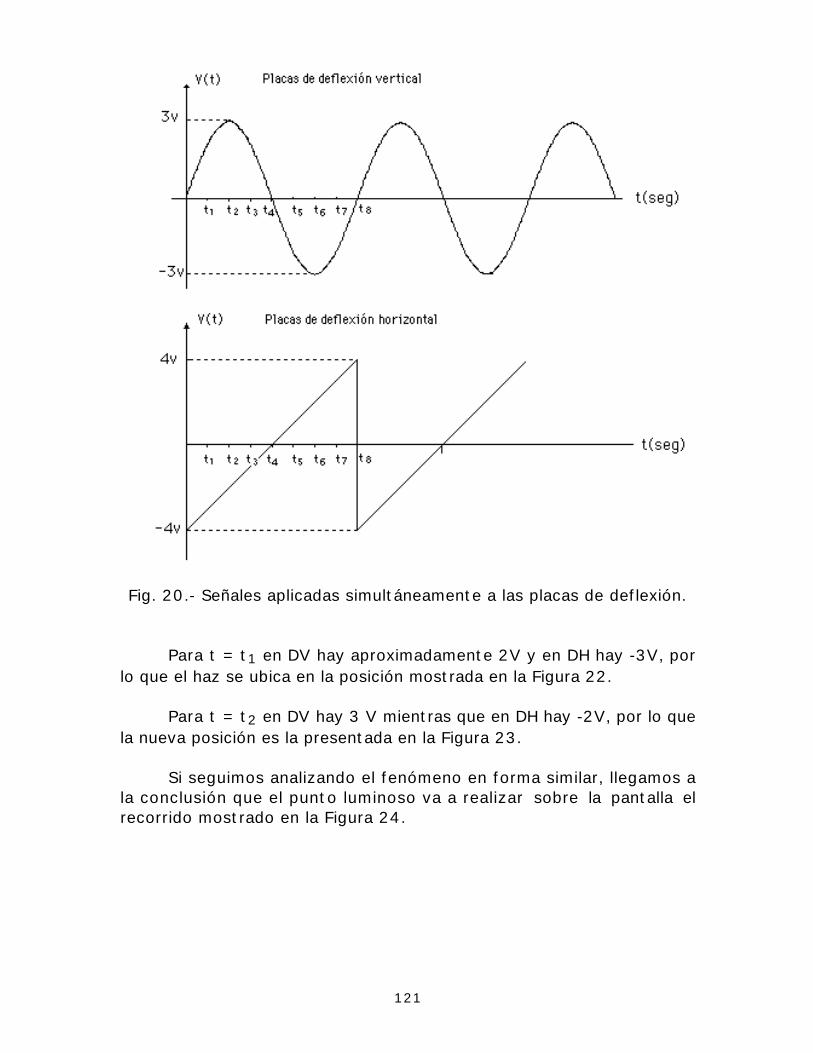
121
Fig. 20.- Señales aplicadas simultáneamente a las placas de deflexión.
Para t = t1 en DV hay aproximadamente 2V y en DH hay -3V, porlo que el haz se ubica en la posición mostrada en la Figura 22.
Para t = t2 en DV hay 3 V mientras que en DH hay -2V, por lo quela nueva posición es la presentada en la Figura 23.
Si seguimos analizando el fenómeno en forma similar, llegamos ala conclusión que el punto luminoso va a realizar sobre la pantalla elrecorrido mostrado en la Figura 24.
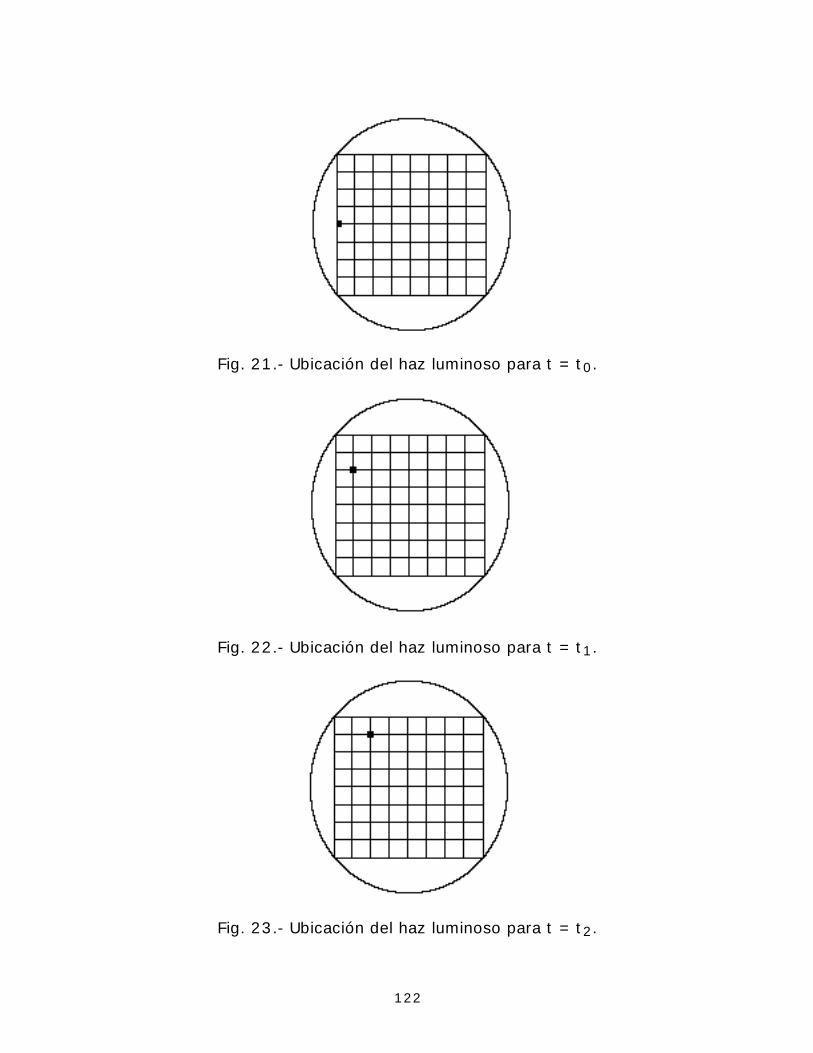
122
Fig. 21.- Ubicación del haz luminoso para t = t0.
Fig. 22.- Ubicación del haz luminoso para t = t1.
Fig. 23.- Ubicación del haz luminoso para t = t2.
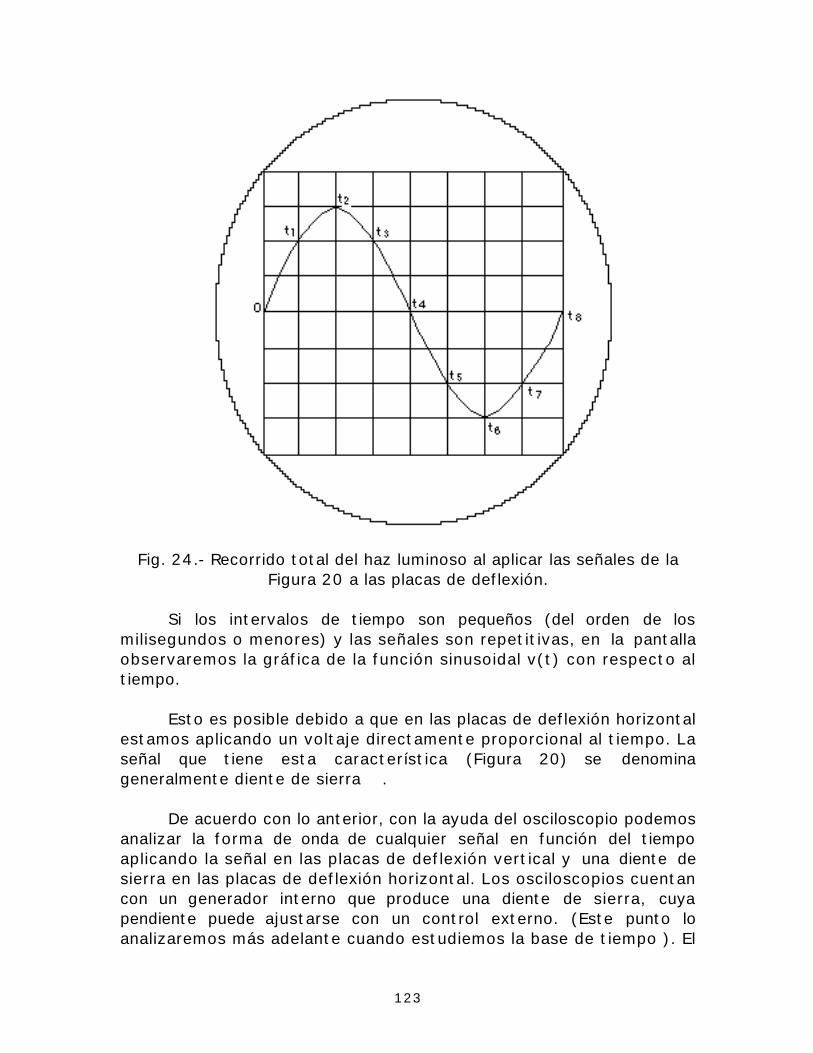
123
Fig. 24.- Recorrido total del haz luminoso al aplicar las señales de laFigura 20 a las placas de deflexión.
Si los intervalos de tiempo son pequeños (del orden de losmilisegundos o menores) y las señales son repetitivas, en la pantallaobservaremos la gráfica de la función sinusoidal v(t) con respecto altiempo.
Esto es posible debido a que en las placas de deflexión horizontalestamos aplicando un voltaje directamente proporcional al tiempo. Laseñal que tiene esta característica (Figura 20) se denominageneralmente diente de sierra .
De acuerdo con lo anterior, con la ayuda del osciloscopio podemosanalizar la forma de onda de cualquier señal en función del tiempoaplicando la señal en las placas de deflexión vertical y una diente desierra en las placas de deflexión horizontal. Los osciloscopios cuentancon un generador interno que produce una diente de sierra, cuyapendiente puede ajustarse con un control externo. (Este punto loanalizaremos más adelante cuando estudiemos la base de tiempo ). El
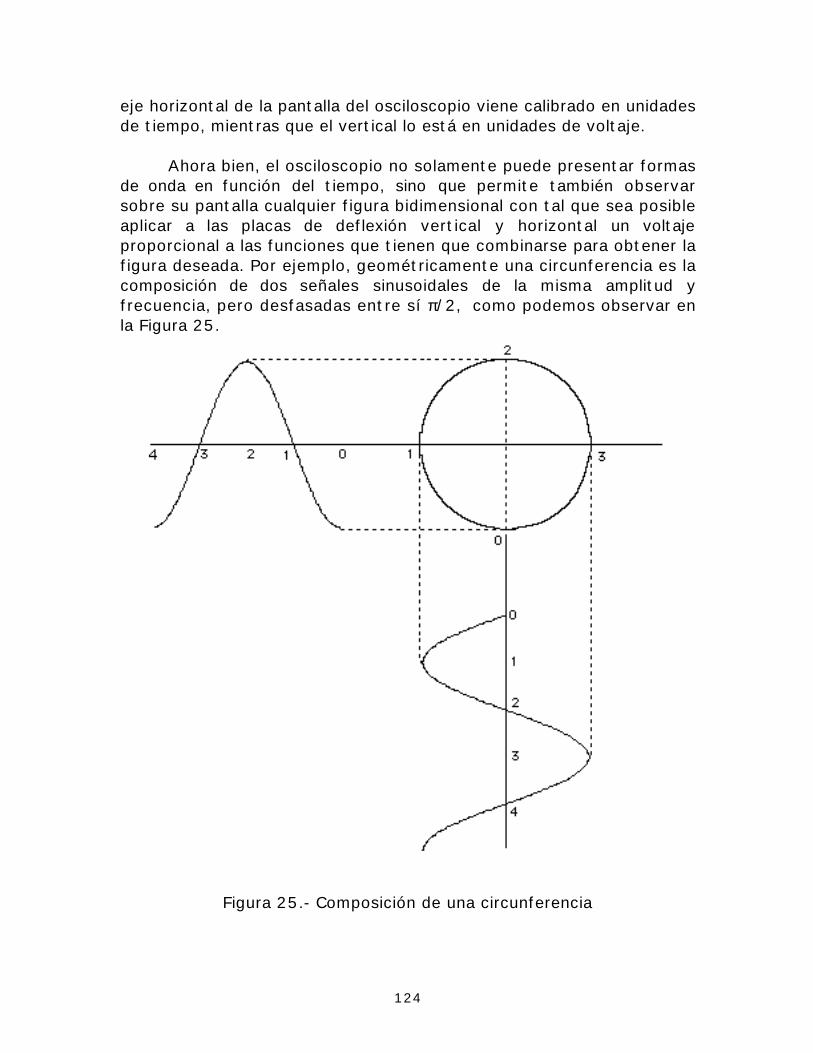
124
eje horizontal de la pantalla del osciloscopio viene calibrado en unidadesde tiempo, mientras que el vertical lo está en unidades de voltaje.
Ahora bien, el osciloscopio no solamente puede presentar formasde onda en función del tiempo, sino que permite también observarsobre su pantalla cualquier figura bidimensional con tal que sea posibleaplicar a las placas de deflexión vertical y horizontal un voltajeproporcional a las funciones que tienen que combinarse para obtener lafigura deseada. Por ejemplo, geométricamente una circunferencia es lacomposición de dos señales sinusoidales de la misma amplitud yfrecuencia, pero desfasadas entre sí π/2, como podemos observar enla Figura 25.
Figura 25.- Composición de una circunferencia
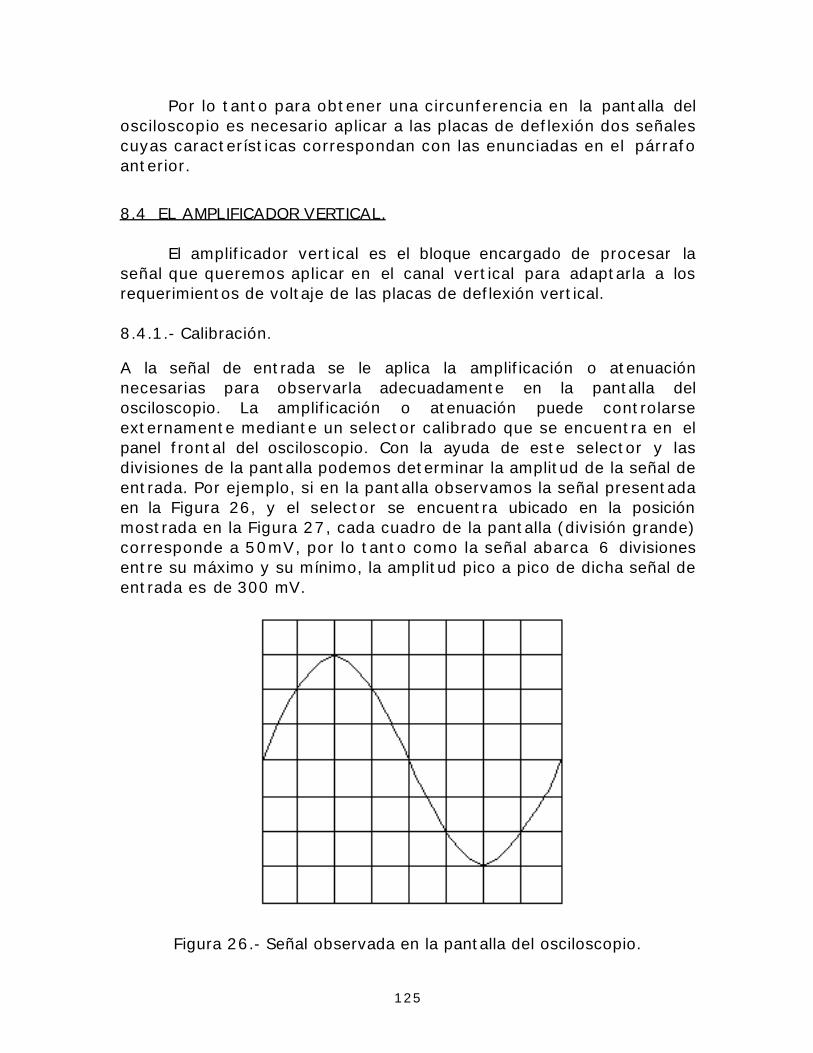
125
Por lo tanto para obtener una circunferencia en la pantalla delosciloscopio es necesario aplicar a las placas de deflexión dos señalescuyas características correspondan con las enunciadas en el párrafoanterior.
8.4 EL AMPLIFICADOR VERTICAL.
El amplificador vertical es el bloque encargado de procesar laseñal que queremos aplicar en el canal vertical para adaptarla a losrequerimientos de voltaje de las placas de deflexión vertical.
8.4.1.- Calibración.
A la señal de entrada se le aplica la amplificación o atenuaciónnecesarias para observarla adecuadamente en la pantalla delosciloscopio. La amplificación o atenuación puede controlarseexternamente mediante un selector calibrado que se encuentra en elpanel frontal del osciloscopio. Con la ayuda de este selector y lasdivisiones de la pantalla podemos determinar la amplitud de la señal deentrada. Por ejemplo, si en la pantalla observamos la señal presentadaen la Figura 26, y el selector se encuentra ubicado en la posiciónmostrada en la Figura 27, cada cuadro de la pantalla (división grande)corresponde a 50mV, por lo tanto como la señal abarca 6 divisionesentre su máximo y su mínimo, la amplitud pico a pico de dicha señal deentrada es de 300 mV.
Figura 26.- Señal observada en la pantalla del osciloscopio.
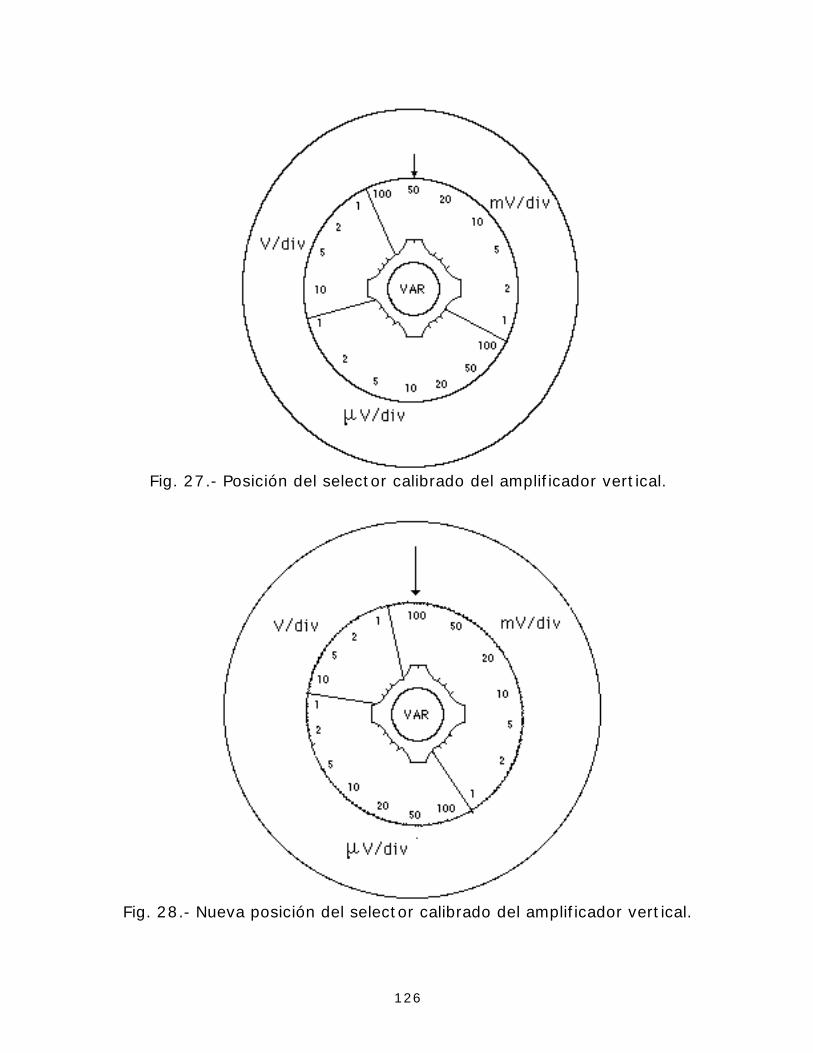
126
Fig. 27.- Posición del selector calibrado del amplificador vertical.
Fig. 28.- Nueva posición del selector calibrado del amplificador vertical.
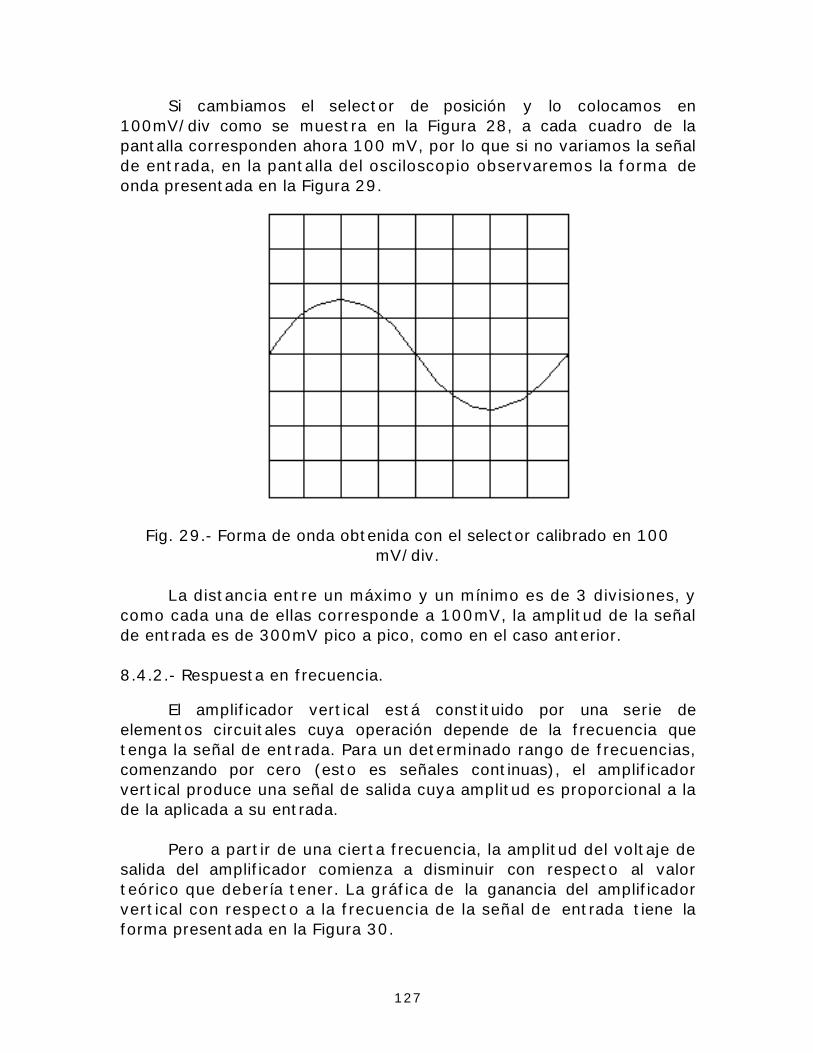
127
Si cambiamos el selector de posición y lo colocamos en100mV/div como se muestra en la Figura 28, a cada cuadro de lapantalla corresponden ahora 100 mV, por lo que si no variamos la señalde entrada, en la pantalla del osciloscopio observaremos la forma deonda presentada en la Figura 29.
Fig. 29.- Forma de onda obtenida con el selector calibrado en 100mV/div.
La distancia entre un máximo y un mínimo es de 3 divisiones, ycomo cada una de ellas corresponde a 100mV, la amplitud de la señalde entrada es de 300mV pico a pico, como en el caso anterior.
8.4.2.- Respuesta en frecuencia.
El amplificador vertical está constituido por una serie deelementos circuitales cuya operación depende de la frecuencia quetenga la señal de entrada. Para un determinado rango de frecuencias,comenzando por cero (esto es señales continuas), el amplificadorvertical produce una señal de salida cuya amplitud es proporcional a lade la aplicada a su entrada.
Pero a partir de una cierta frecuencia, la amplitud del voltaje desalida del amplificador comienza a disminuir con respecto al valorteórico que debería tener. La gráfica de la ganancia del amplificadorvertical con respecto a la frecuencia de la señal de entrada tiene laforma presentada en la Figura 30.
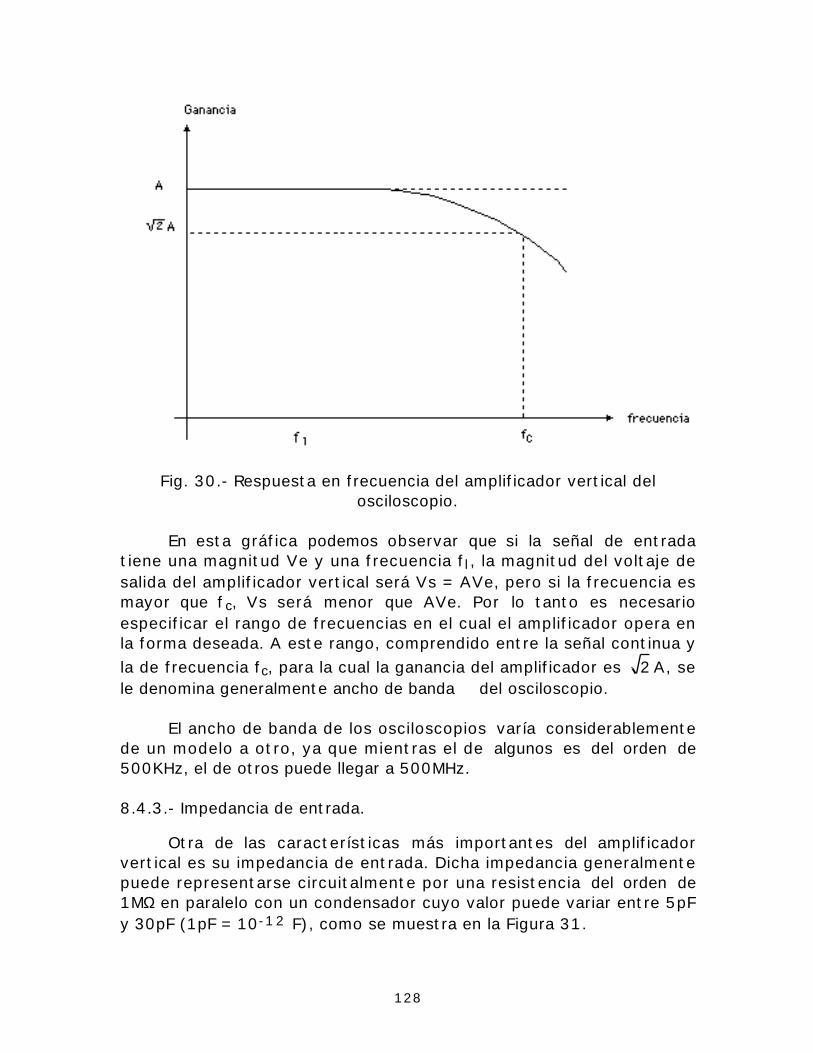
128
Fig. 30.- Respuesta en frecuencia del amplificador vertical delosciloscopio.
En esta gráfica podemos observar que si la señal de entradatiene una magnitud Ve y una frecuencia fl , la magnitud del voltaje desalida del amplificador vertical será Vs = AVe, pero si la frecuencia esmayor que fc, Vs será menor que AVe. Por lo tanto es necesarioespecificar el rango de frecuencias en el cual el amplificador opera enla forma deseada. A este rango, comprendido entre la señal continua yla de frecuencia fc, para la cual la ganancia del amplificador es 2A, sele denomina generalmente ancho de banda del osciloscopio.
El ancho de banda de los osciloscopios varía considerablementede un modelo a otro, ya que mientras el de algunos es del orden de500KHz, el de otros puede llegar a 500MHz.
8.4.3.- Impedancia de entrada.
Otra de las características más importantes del amplificadorvertical es su impedancia de entrada. Dicha impedancia generalmentepuede representarse circuitalmente por una resistencia del orden de1MΩ en paralelo con un condensador cuyo valor puede variar entre 5pFy 30pF (1pF = 10-12 F), como se muestra en la Figura 31.
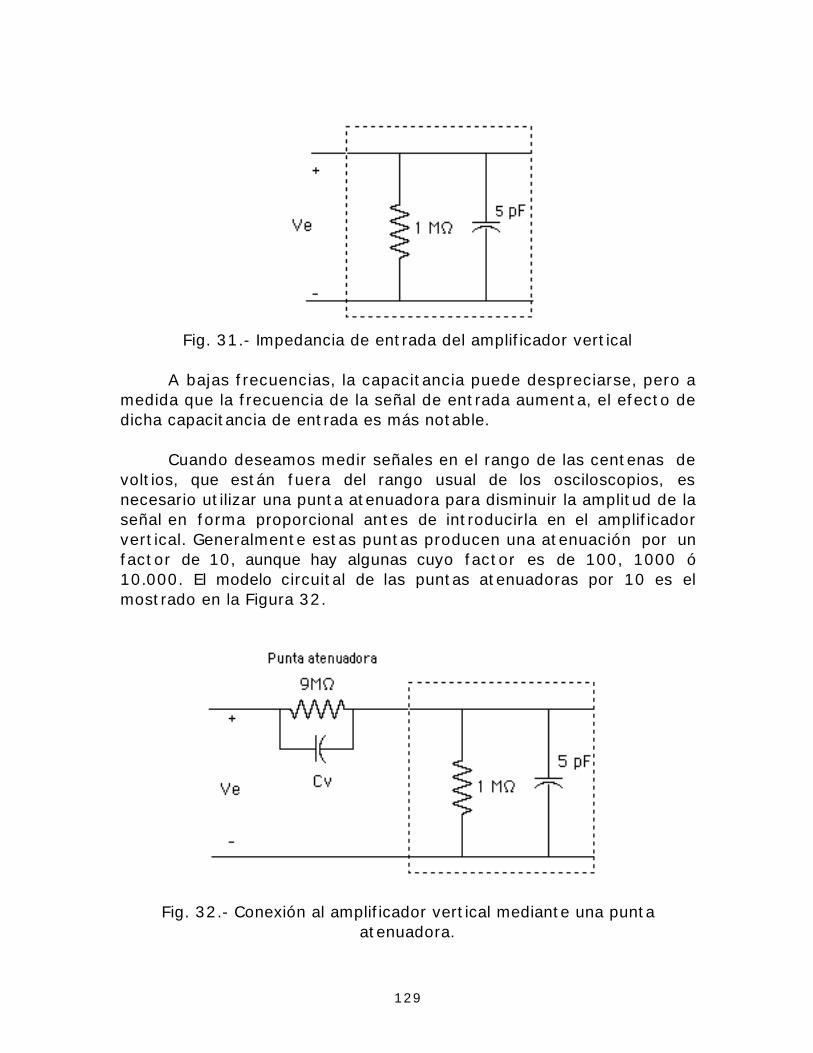
129
Fig. 31.- Impedancia de entrada del amplificador vertical
A bajas frecuencias, la capacitancia puede despreciarse, pero amedida que la frecuencia de la señal de entrada aumenta, el efecto dedicha capacitancia de entrada es más notable.
Cuando deseamos medir señales en el rango de las centenas devoltios, que están fuera del rango usual de los osciloscopios, esnecesario utilizar una punta atenuadora para disminuir la amplitud de laseñal en forma proporcional antes de introducirla en el amplificadorvertical. Generalmente estas puntas producen una atenuación por unfactor de 10, aunque hay algunas cuyo factor es de 100, 1000 ó10.000. El modelo circuital de las puntas atenuadoras por 10 es elmostrado en la Figura 32.
Fig. 32.- Conexión al amplificador vertical mediante una puntaatenuadora.
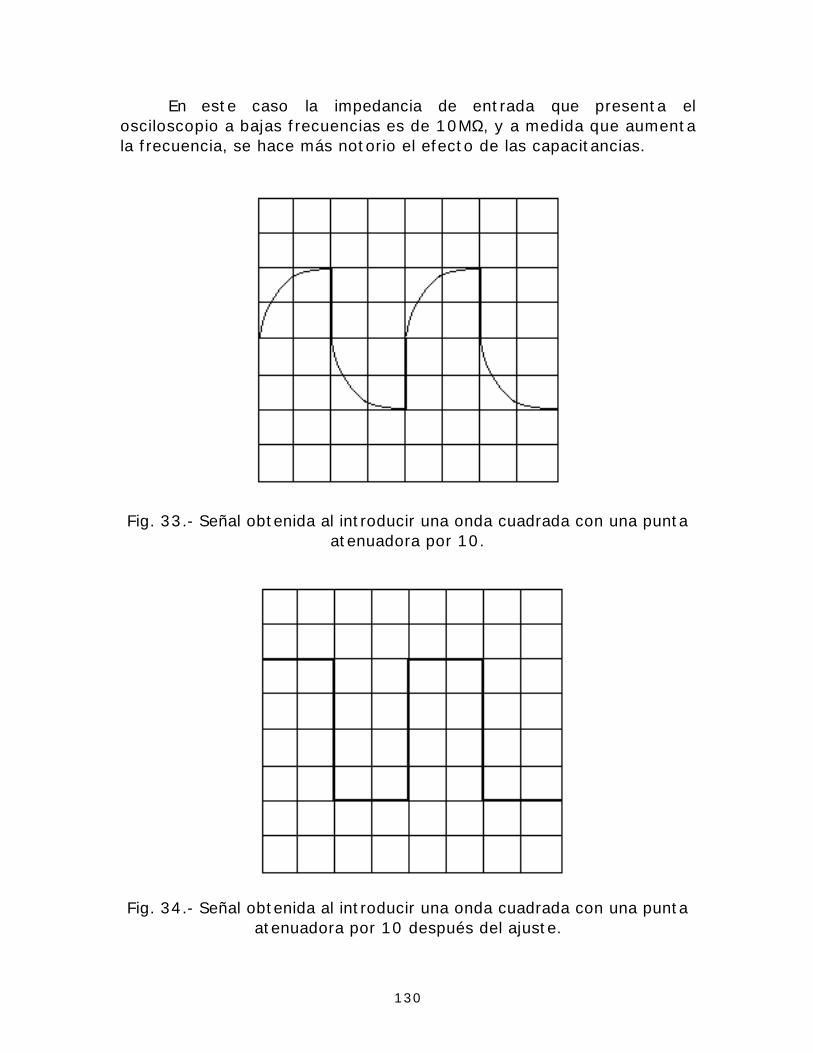
130
En este caso la impedancia de entrada que presenta elosciloscopio a bajas frecuencias es de 10MΩ, y a medida que aumentala frecuencia, se hace más notorio el efecto de las capacitancias.
Fig. 33.- Señal obtenida al introducir una onda cuadrada con una puntaatenuadora por 10.
Fig. 34.- Señal obtenida al introducir una onda cuadrada con una puntaatenuadora por 10 después del ajuste.
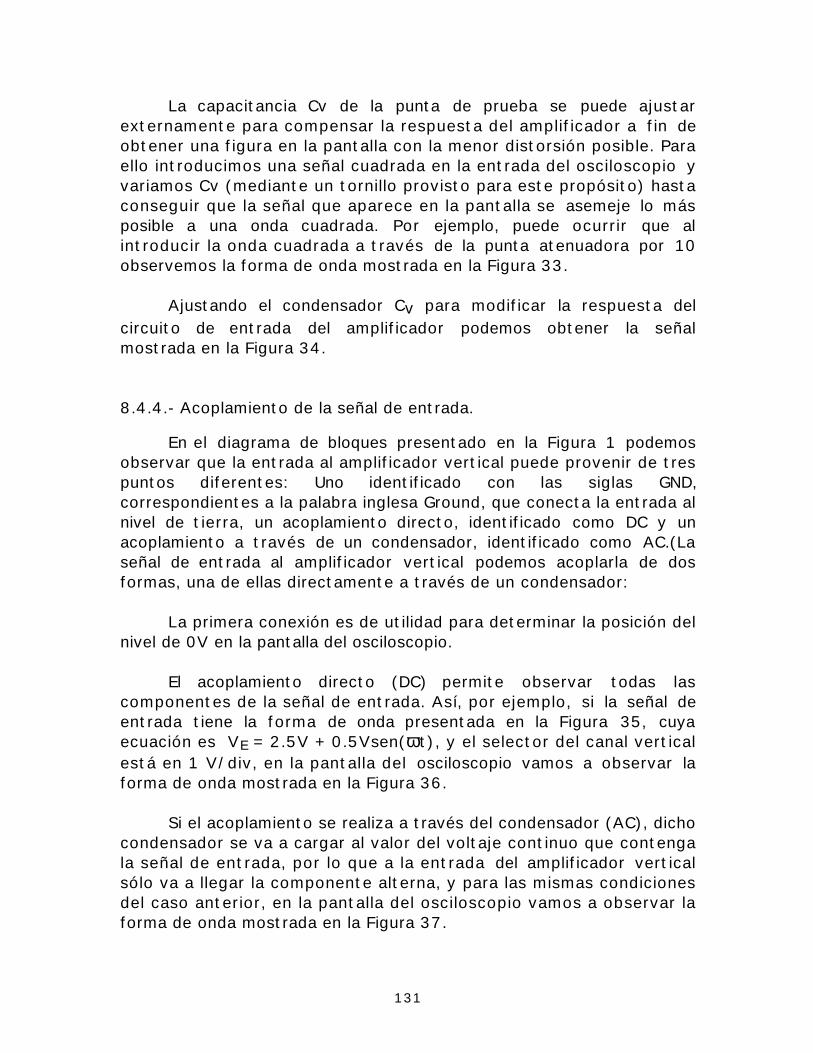
131
La capacitancia Cv de la punta de prueba se puede ajustarexternamente para compensar la respuesta del amplificador a fin deobtener una figura en la pantalla con la menor distorsión posible. Paraello introducimos una señal cuadrada en la entrada del osciloscopio yvariamos Cv (mediante un tornillo provisto para este propósito) hastaconseguir que la señal que aparece en la pantalla se asemeje lo másposible a una onda cuadrada. Por ejemplo, puede ocurrir que alintroducir la onda cuadrada a través de la punta atenuadora por 10observemos la forma de onda mostrada en la Figura 33.
Ajustando el condensador Cv para modificar la respuesta delcircuito de entrada del amplificador podemos obtener la señalmostrada en la Figura 34.
8.4.4.- Acoplamiento de la señal de entrada.
En el diagrama de bloques presentado en la Figura 1 podemosobservar que la entrada al amplificador vertical puede provenir de trespuntos diferentes: Uno identificado con las siglas GND,correspondientes a la palabra inglesa Ground, que conecta la entrada alnivel de tierra, un acoplamiento directo, identificado como DC y unacoplamiento a través de un condensador, identificado como AC.(Laseñal de entrada al amplificador vertical podemos acoplarla de dosformas, una de ellas directamente a través de un condensador:
La primera conexión es de utilidad para determinar la posición delnivel de 0V en la pantalla del osciloscopio.
El acoplamiento directo (DC) permite observar todas lascomponentes de la señal de entrada. Así, por ejemplo, si la señal deentrada tiene la forma de onda presentada en la Figura 35, cuyaecuación es VE = 2.5V + 0.5Vsen(ωt), y el selector del canal verticalestá en 1 V/div, en la pantalla del osciloscopio vamos a observar laforma de onda mostrada en la Figura 36.
Si el acoplamiento se realiza a través del condensador (AC), dichocondensador se va a cargar al valor del voltaje continuo que contengala señal de entrada, por lo que a la entrada del amplificador verticalsólo va a llegar la componente alterna, y para las mismas condicionesdel caso anterior, en la pantalla del osciloscopio vamos a observar laforma de onda mostrada en la Figura 37.
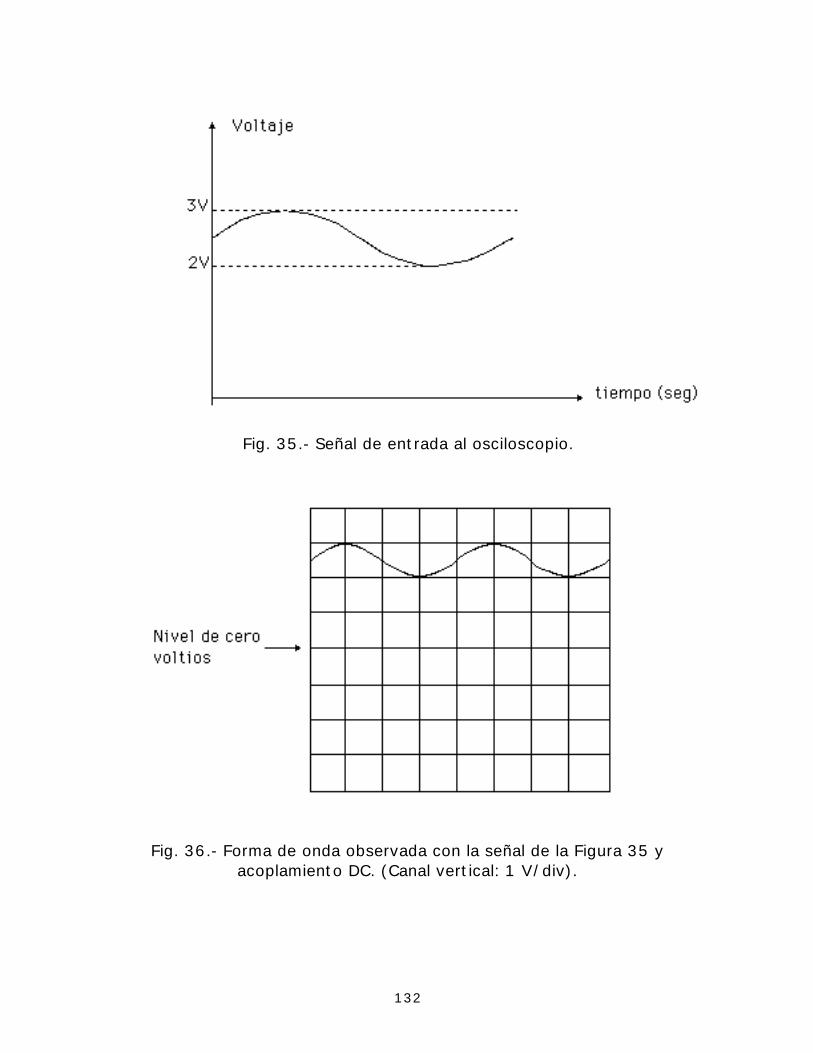
132
Fig. 35.- Señal de entrada al osciloscopio.
Fig. 36.- Forma de onda observada con la señal de la Figura 35 yacoplamiento DC. (Canal vertical: 1 V/div).
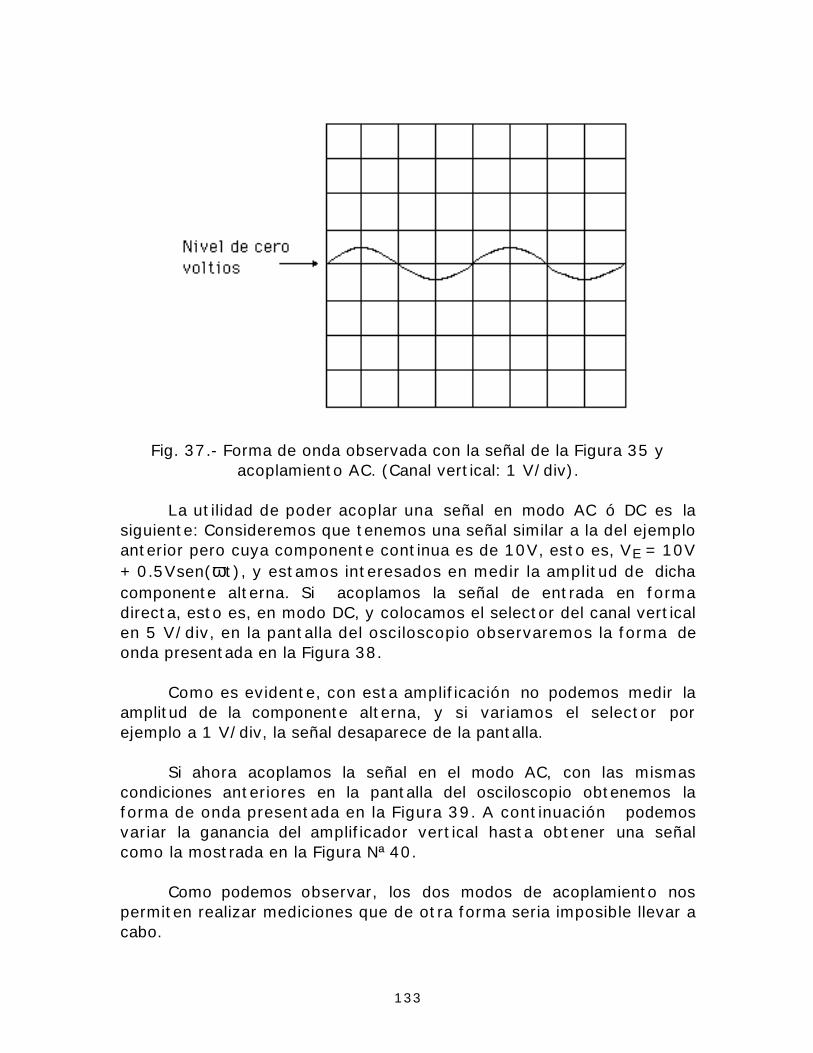
133
Fig. 37.- Forma de onda observada con la señal de la Figura 35 yacoplamiento AC. (Canal vertical: 1 V/div).
La utilidad de poder acoplar una señal en modo AC ó DC es lasiguiente: Consideremos que tenemos una señal similar a la del ejemploanterior pero cuya componente continua es de 10V, esto es, VE = 10V+ 0.5Vsen(ωt), y estamos interesados en medir la amplitud de dichacomponente alterna. Si acoplamos la señal de entrada en formadirecta, esto es, en modo DC, y colocamos el selector del canal verticalen 5 V/div, en la pantalla del osciloscopio observaremos la forma deonda presentada en la Figura 38.
Como es evidente, con esta amplificación no podemos medir laamplitud de la componente alterna, y si variamos el selector porejemplo a 1 V/div, la señal desaparece de la pantalla.
Si ahora acoplamos la señal en el modo AC, con las mismascondiciones anteriores en la pantalla del osciloscopio obtenemos laforma de onda presentada en la Figura 39. A continuación podemosvariar la ganancia del amplificador vertical hasta obtener una señalcomo la mostrada en la Figura Nª 40.
Como podemos observar, los dos modos de acoplamiento nospermiten realizar mediciones que de otra forma seria imposible llevar acabo.
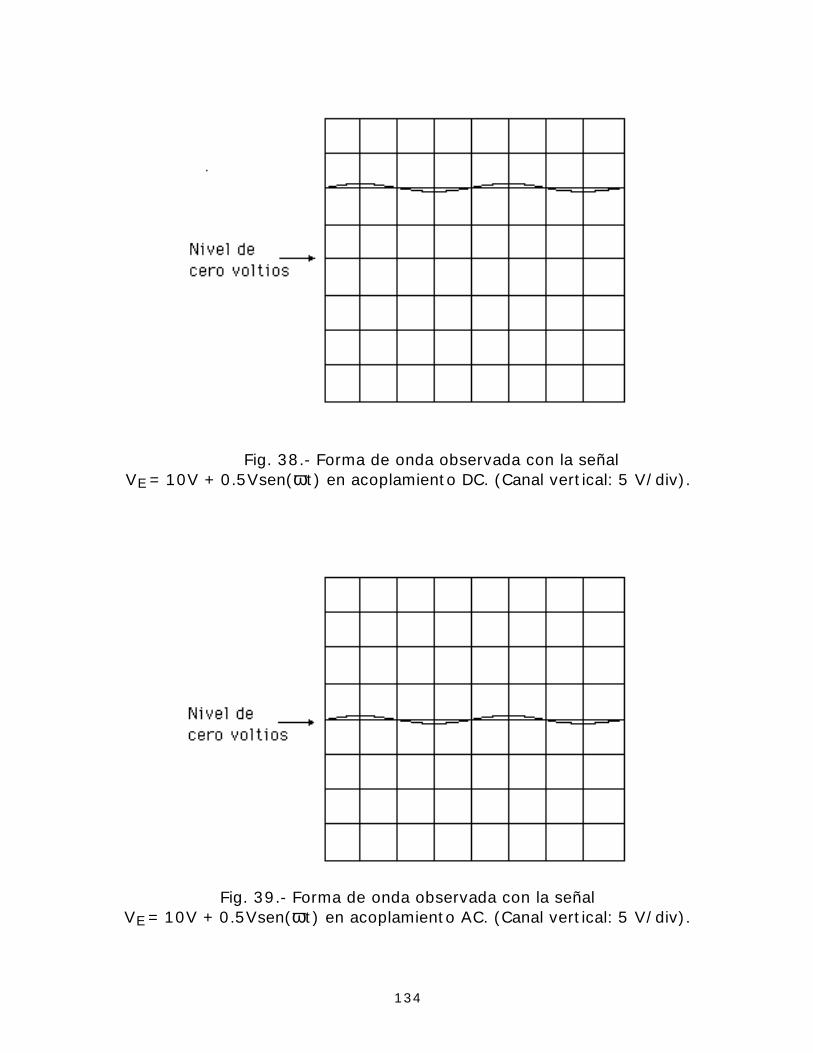
134
Fig. 38.- Forma de onda observada con la señalVE = 10V + 0.5Vsen(ωt) en acoplamiento DC. (Canal vertical: 5 V/div).
Fig. 39.- Forma de onda observada con la señalVE = 10V + 0.5Vsen(ωt) en acoplamiento AC. (Canal vertical: 5 V/div).
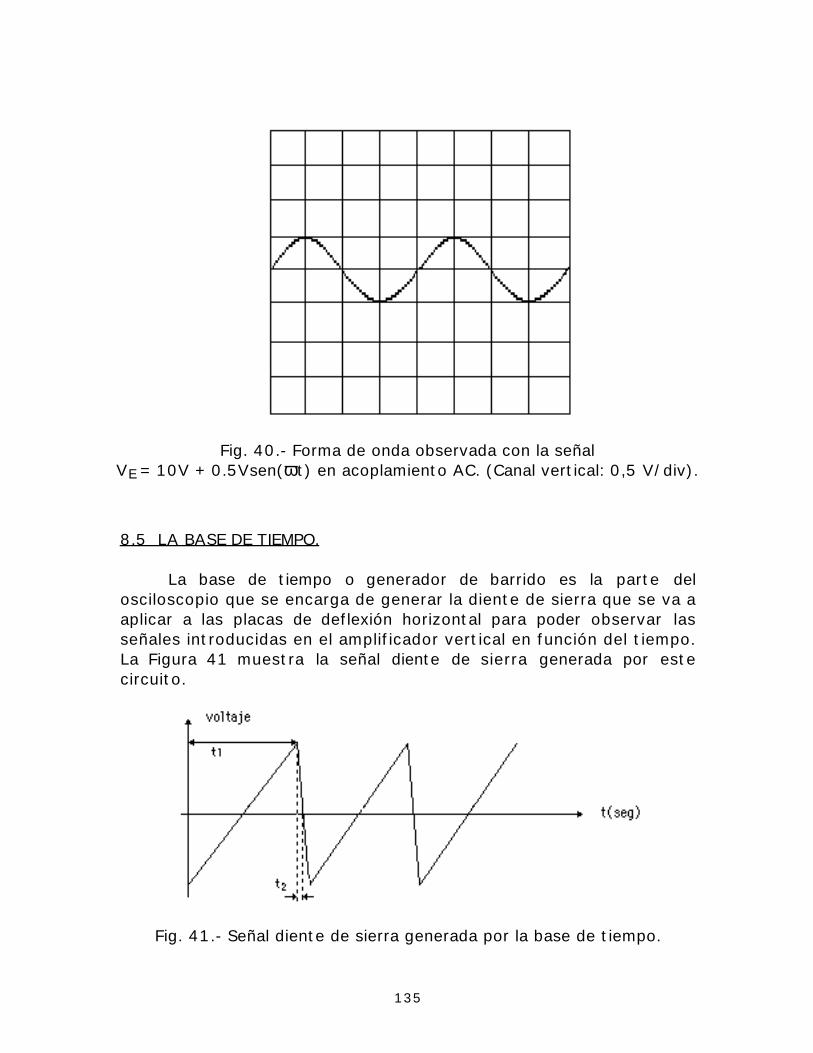
135
Fig. 40.- Forma de onda observada con la señalVE = 10V + 0.5Vsen(ωt) en acoplamiento AC. (Canal vertical: 0,5 V/div).
8.5 LA BASE DE TIEMPO.
La base de tiempo o generador de barrido es la parte delosciloscopio que se encarga de generar la diente de sierra que se va aaplicar a las placas de deflexión horizontal para poder observar lasseñales introducidas en el amplificador vertical en función del tiempo.La Figura 41 muestra la señal diente de sierra generada por estecircuito.
Fig. 41.- Señal diente de sierra generada por la base de tiempo.
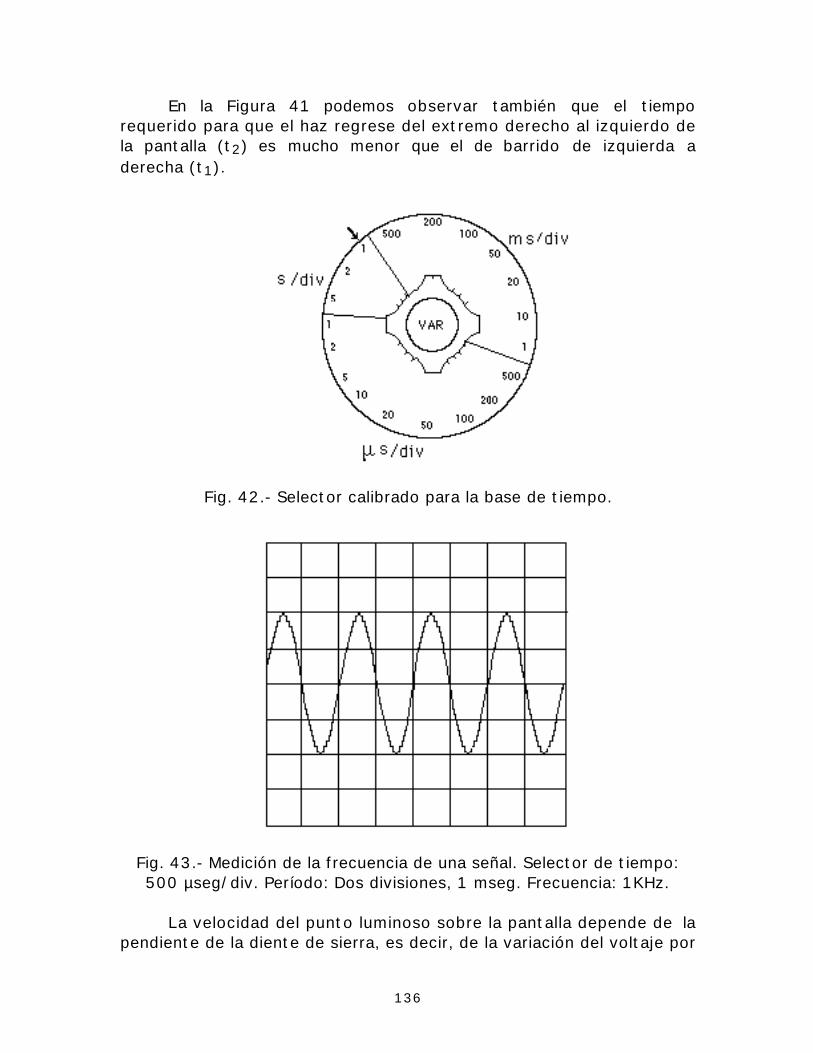
136
En la Figura 41 podemos observar también que el tiemporequerido para que el haz regrese del extremo derecho al izquierdo dela pantalla (t2) es mucho menor que el de barrido de izquierda aderecha (t1).
Fig. 42.- Selector calibrado para la base de tiempo.
Fig. 43.- Medición de la frecuencia de una señal. Selector de tiempo:500 µseg/div. Período: Dos divisiones, 1 mseg. Frecuencia: 1KHz.
La velocidad del punto luminoso sobre la pantalla depende de lapendiente de la diente de sierra, es decir, de la variación del voltaje por
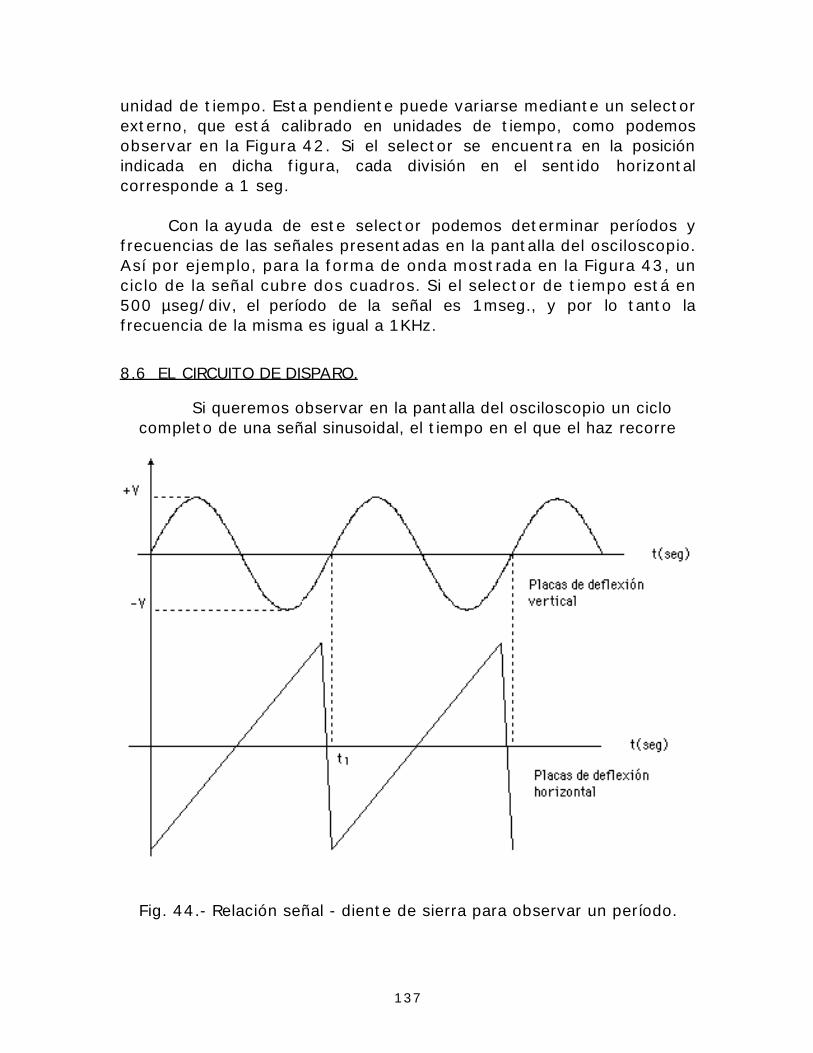
137
unidad de tiempo. Esta pendiente puede variarse mediante un selectorexterno, que está calibrado en unidades de tiempo, como podemosobservar en la Figura 42. Si el selector se encuentra en la posiciónindicada en dicha figura, cada división en el sentido horizontalcorresponde a 1 seg.
Con la ayuda de este selector podemos determinar períodos yfrecuencias de las señales presentadas en la pantalla del osciloscopio.Así por ejemplo, para la forma de onda mostrada en la Figura 43, unciclo de la señal cubre dos cuadros. Si el selector de tiempo está en500 µseg/div, el período de la señal es 1mseg., y por lo tanto lafrecuencia de la misma es igual a 1KHz.
8.6 EL CIRCUITO DE DISPARO.
Si queremos observar en la pantalla del osciloscopio un ciclocompleto de una señal sinusoidal, el tiempo en el que el haz recorre
Fig. 44.- Relación señal - diente de sierra para observar un período.
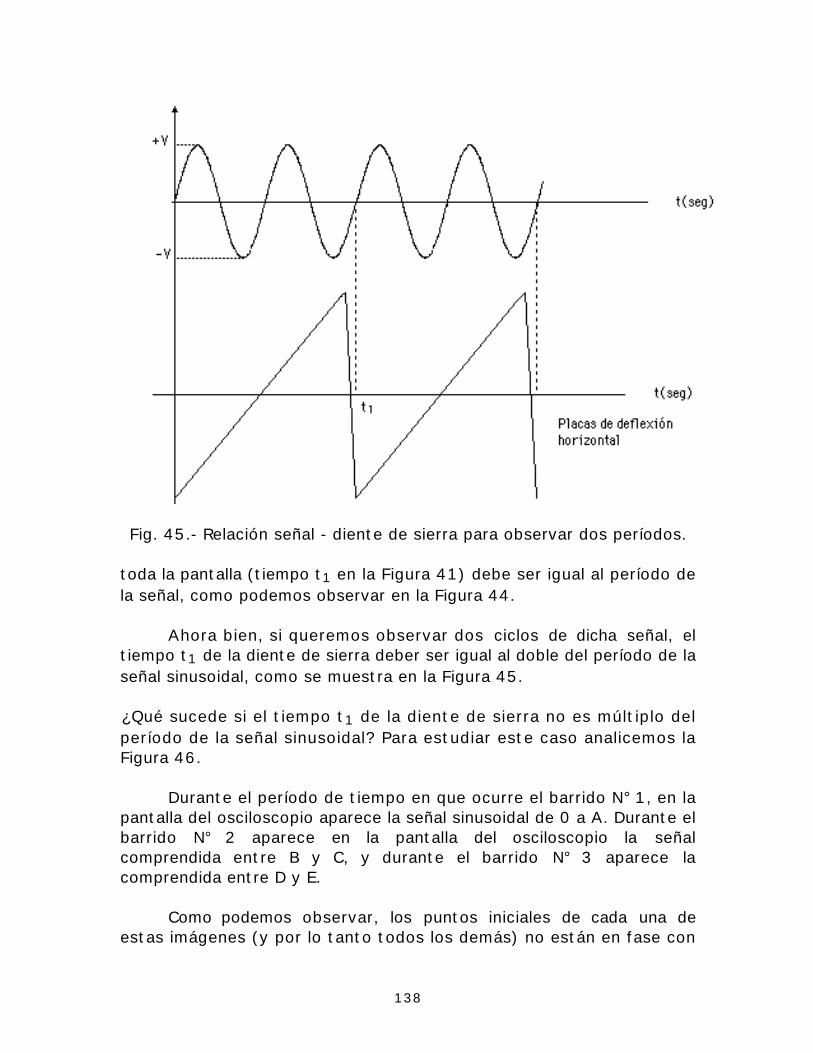
138
Fig. 45.- Relación señal - diente de sierra para observar dos períodos.
toda la pantalla (tiempo t1 en la Figura 41) debe ser igual al período dela señal, como podemos observar en la Figura 44.
Ahora bien, si queremos observar dos ciclos de dicha señal, eltiempo t1 de la diente de sierra deber ser igual al doble del período de laseñal sinusoidal, como se muestra en la Figura 45.
¿Qué sucede si el tiempo t1 de la diente de sierra no es múltiplo delperíodo de la señal sinusoidal? Para estudiar este caso analicemos laFigura 46.
Durante el período de tiempo en que ocurre el barrido N° 1, en lapantalla del osciloscopio aparece la señal sinusoidal de 0 a A. Durante elbarrido N° 2 aparece en la pantalla del osciloscopio la señalcomprendida entre B y C, y durante el barrido N° 3 aparece lacomprendida entre D y E.
Como podemos observar, los puntos iniciales de cada una deestas imágenes (y por lo tanto todos los demás) no están en fase con
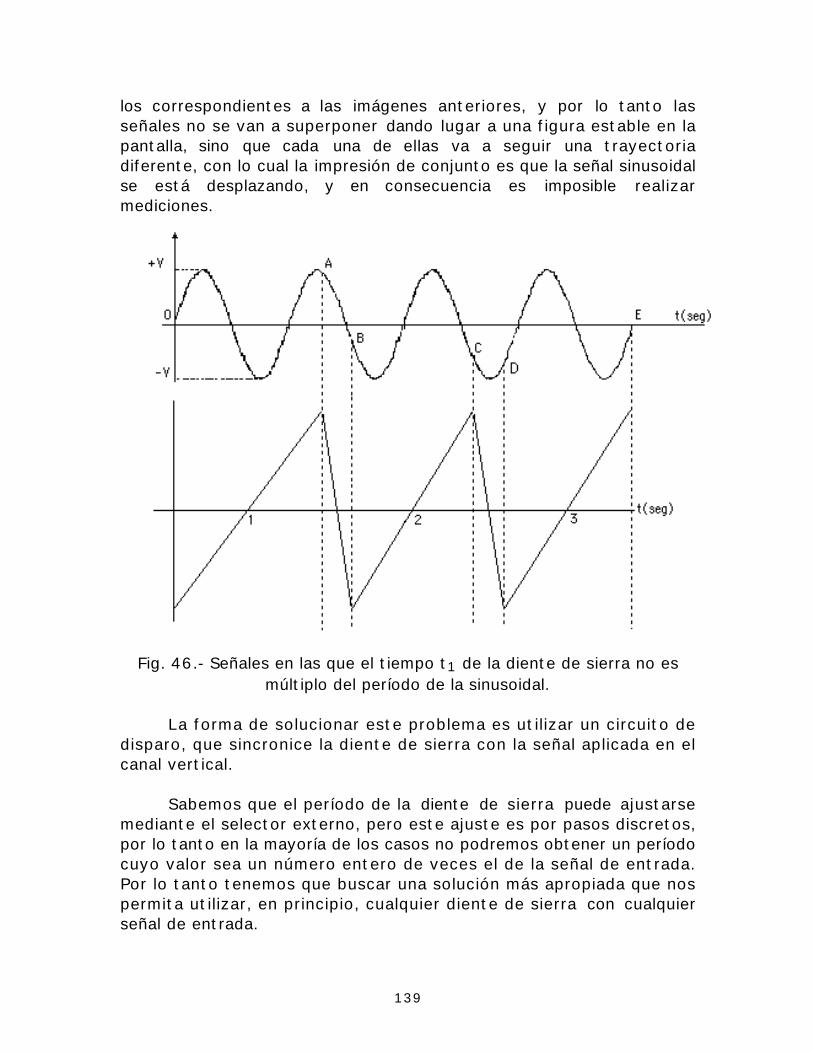
139
los correspondientes a las imágenes anteriores, y por lo tanto lasseñales no se van a superponer dando lugar a una figura estable en lapantalla, sino que cada una de ellas va a seguir una trayectoriadiferente, con lo cual la impresión de conjunto es que la señal sinusoidalse está desplazando, y en consecuencia es imposible realizarmediciones.
Fig. 46.- Señales en las que el tiempo t1 de la diente de sierra no esmúltiplo del período de la sinusoidal.
La forma de solucionar este problema es utilizar un circuito dedisparo, que sincronice la diente de sierra con la señal aplicada en elcanal vertical.
Sabemos que el período de la diente de sierra puede ajustarsemediante el selector externo, pero este ajuste es por pasos discretos,por lo tanto en la mayoría de los casos no podremos obtener un períodocuyo valor sea un número entero de veces el de la señal de entrada.Por lo tanto tenemos que buscar una solución más apropiada que nospermita utilizar, en principio, cualquier diente de sierra con cualquierseñal de entrada.
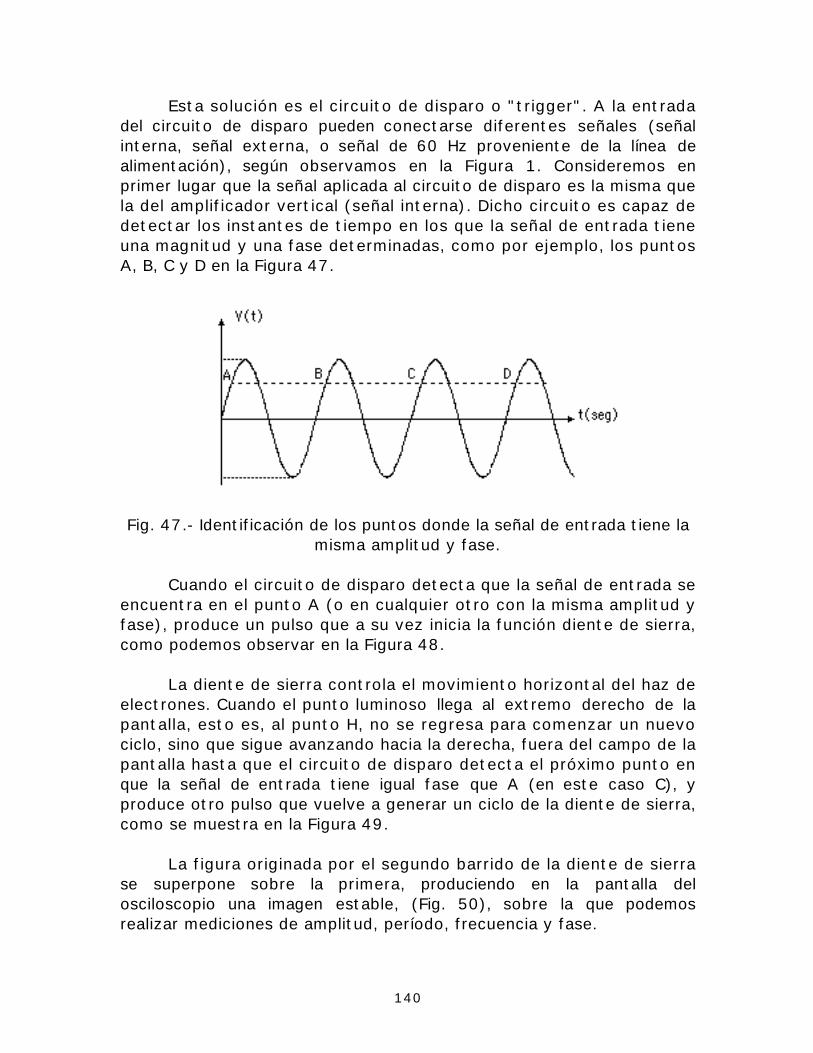
140
Esta solución es el circuito de disparo o "trigger". A la entradadel circuito de disparo pueden conectarse diferentes señales (señalinterna, señal externa, o señal de 60 Hz proveniente de la línea dealimentación), según observamos en la Figura 1. Consideremos enprimer lugar que la señal aplicada al circuito de disparo es la misma quela del amplificador vertical (señal interna). Dicho circuito es capaz dedetectar los instantes de tiempo en los que la señal de entrada tieneuna magnitud y una fase determinadas, como por ejemplo, los puntosA, B, C y D en la Figura 47.
Fig. 47.- Identificación de los puntos donde la señal de entrada tiene lamisma amplitud y fase.
Cuando el circuito de disparo detecta que la señal de entrada seencuentra en el punto A (o en cualquier otro con la misma amplitud yfase), produce un pulso que a su vez inicia la función diente de sierra,como podemos observar en la Figura 48.
La diente de sierra controla el movimiento horizontal del haz deelectrones. Cuando el punto luminoso llega al extremo derecho de lapantalla, esto es, al punto H, no se regresa para comenzar un nuevociclo, sino que sigue avanzando hacia la derecha, fuera del campo de lapantalla hasta que el circuito de disparo detecta el próximo punto enque la señal de entrada tiene igual fase que A (en este caso C), yproduce otro pulso que vuelve a generar un ciclo de la diente de sierra,como se muestra en la Figura 49.
La figura originada por el segundo barrido de la diente de sierrase superpone sobre la primera, produciendo en la pantalla delosciloscopio una imagen estable, (Fig. 50), sobre la que podemosrealizar mediciones de amplitud, período, frecuencia y fase.
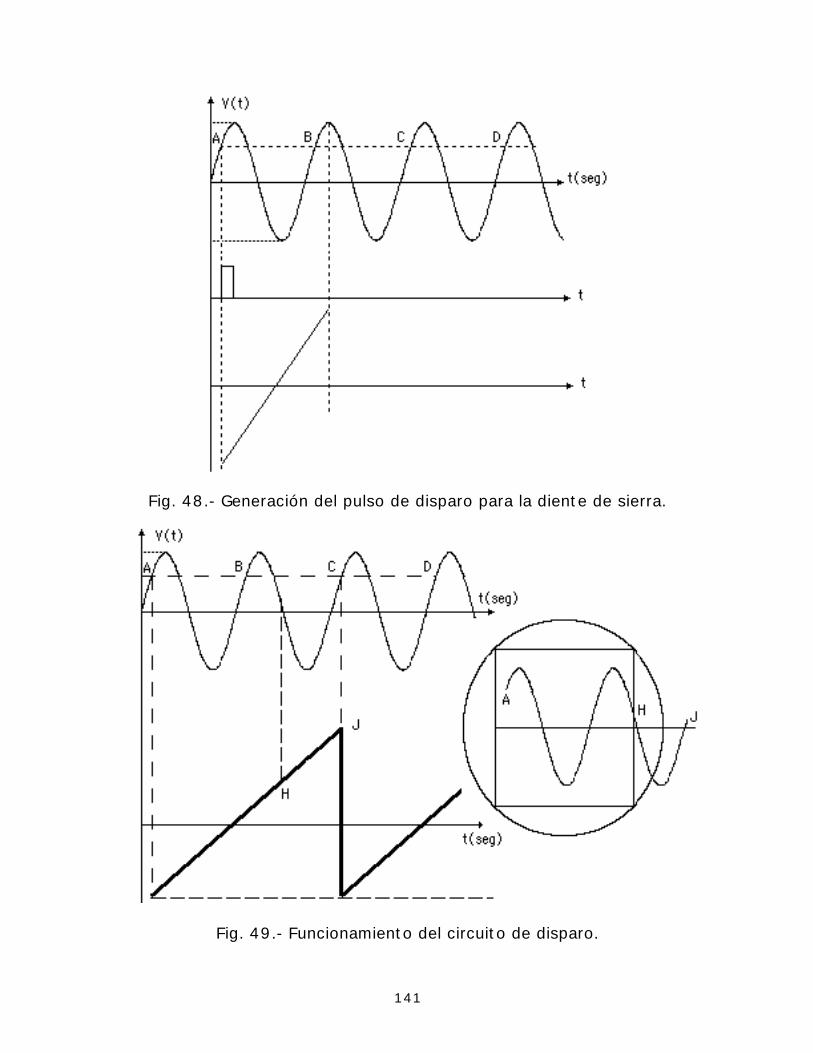
141
Fig. 48.- Generación del pulso de disparo para la diente de sierra.
Fig. 49.- Funcionamiento del circuito de disparo.
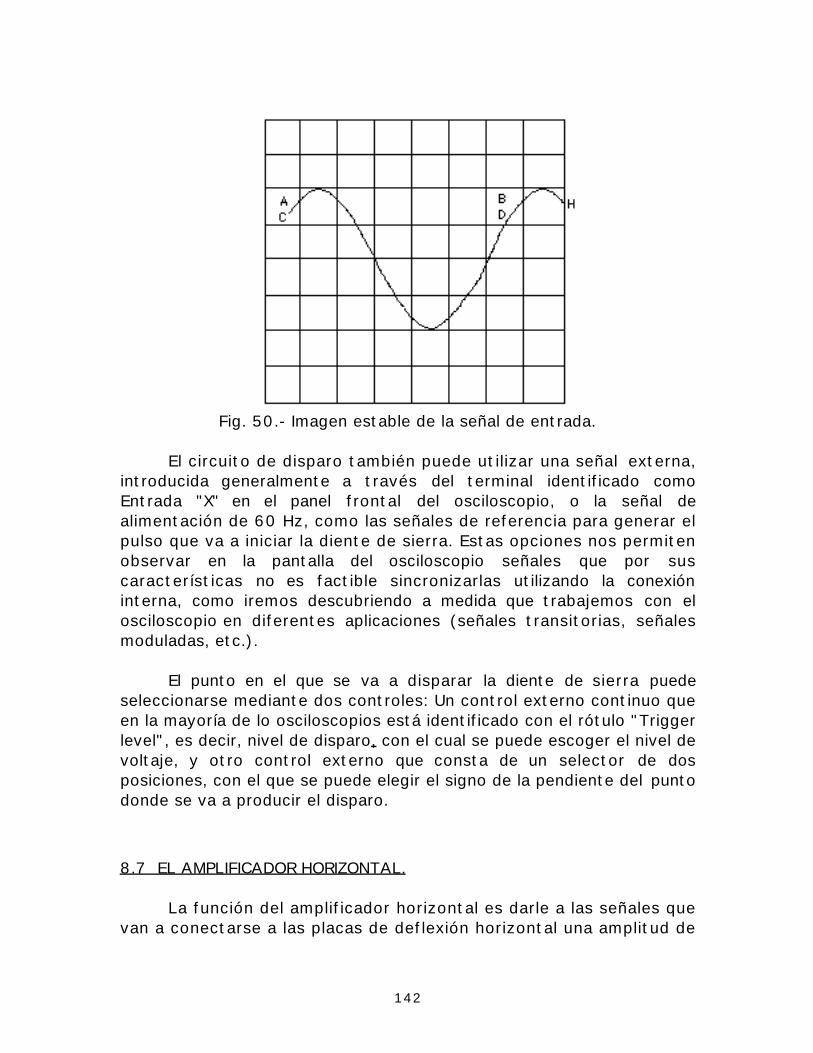
142
Fig. 50.- Imagen estable de la señal de entrada.
El circuito de disparo también puede utilizar una señal externa,introducida generalmente a través del terminal identificado comoEntrada "X" en el panel frontal del osciloscopio, o la señal dealimentación de 60 Hz, como las señales de referencia para generar elpulso que va a iniciar la diente de sierra. Estas opciones nos permitenobservar en la pantalla del osciloscopio señales que por suscaracterísticas no es factible sincronizarlas utilizando la conexióninterna, como iremos descubriendo a medida que trabajemos con elosciloscopio en diferentes aplicaciones (señales transitorias, señalesmoduladas, etc.).
El punto en el que se va a disparar la diente de sierra puedeseleccionarse mediante dos controles: Un control externo continuo queen la mayoría de lo osciloscopios está identificado con el rótulo "Triggerlevel", es decir, nivel de disparo, con el cual se puede escoger el nivel devoltaje, y otro control externo que consta de un selector de dosposiciones, con el que se puede elegir el signo de la pendiente del puntodonde se va a producir el disparo.
8.7 EL AMPLIFICADOR HORIZONTAL.
La función del amplificador horizontal es darle a las señales quevan a conectarse a las placas de deflexión horizontal una amplitud de
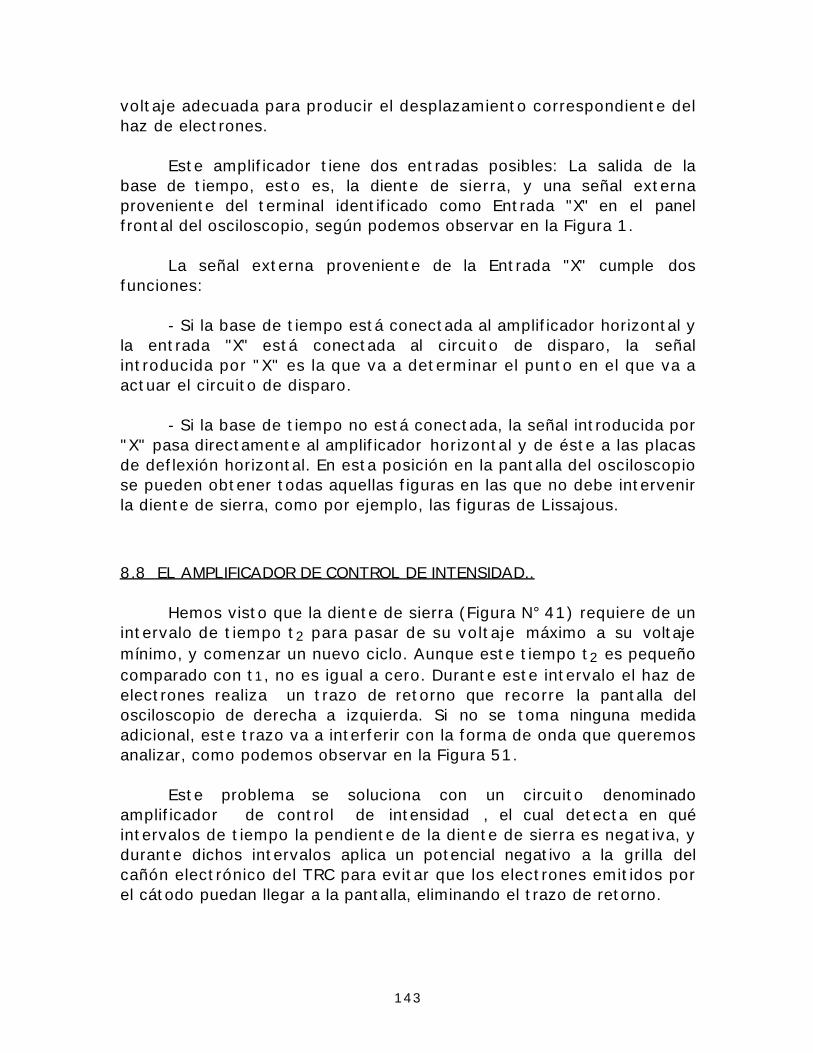
143
voltaje adecuada para producir el desplazamiento correspondiente delhaz de electrones.
Este amplificador tiene dos entradas posibles: La salida de labase de tiempo, esto es, la diente de sierra, y una señal externaproveniente del terminal identificado como Entrada "X" en el panelfrontal del osciloscopio, según podemos observar en la Figura 1.
La señal externa proveniente de la Entrada "X" cumple dosfunciones:
- Si la base de tiempo está conectada al amplificador horizontal yla entrada "X" está conectada al circuito de disparo, la señalintroducida por "X" es la que va a determinar el punto en el que va aactuar el circuito de disparo.
- Si la base de tiempo no está conectada, la señal introducida por"X" pasa directamente al amplificador horizontal y de éste a las placasde deflexión horizontal. En esta posición en la pantalla del osciloscopiose pueden obtener todas aquellas figuras en las que no debe intervenirla diente de sierra, como por ejemplo, las figuras de Lissajous.
8.8 EL AMPLIFICADOR DE CONTROL DE INTENSIDAD..
Hemos visto que la diente de sierra (Figura N° 41) requiere de unintervalo de tiempo t2 para pasar de su voltaje máximo a su voltajemínimo, y comenzar un nuevo ciclo. Aunque este tiempo t2 es pequeñocomparado con t1, no es igual a cero. Durante este intervalo el haz deelectrones realiza un trazo de retorno que recorre la pantalla delosciloscopio de derecha a izquierda. Si no se toma ninguna medidaadicional, este trazo va a interferir con la forma de onda que queremosanalizar, como podemos observar en la Figura 51.
Este problema se soluciona con un circuito denominadoamplificador de control de intensidad , el cual detecta en quéintervalos de tiempo la pendiente de la diente de sierra es negativa, ydurante dichos intervalos aplica un potencial negativo a la grilla delcañón electrónico del TRC para evitar que los electrones emitidos porel cátodo puedan llegar a la pantalla, eliminando el trazo de retorno.
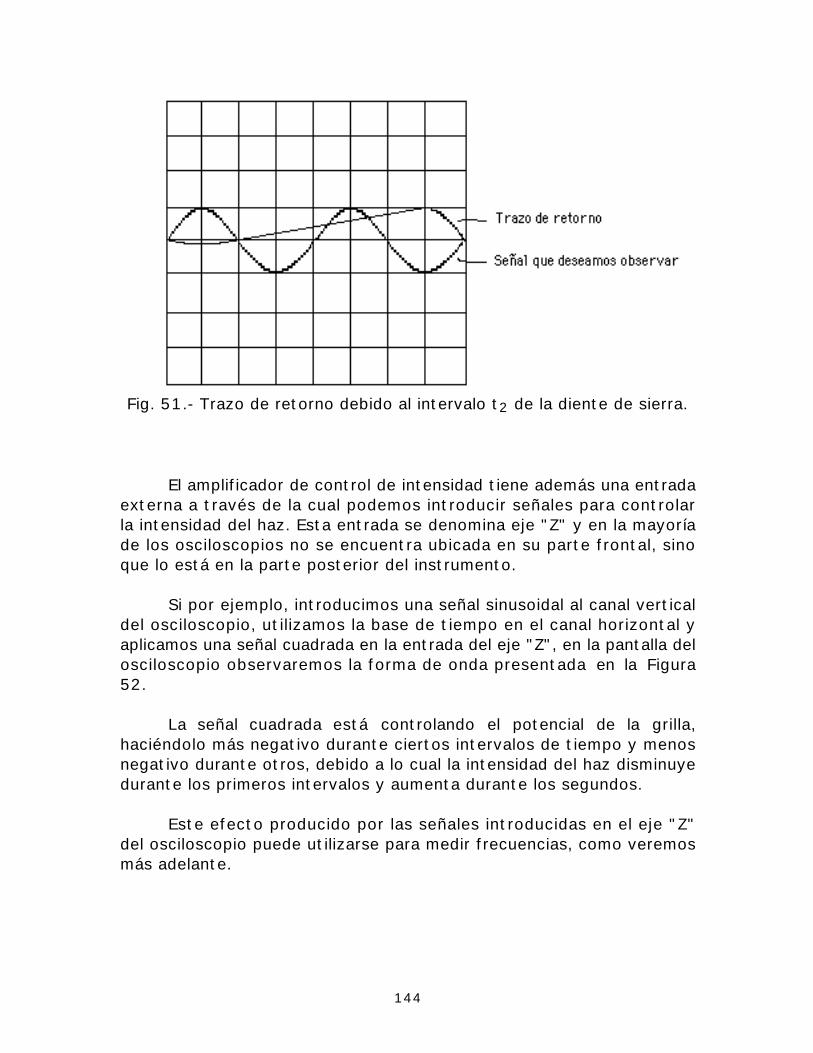
144
Fig. 51.- Trazo de retorno debido al intervalo t2 de la diente de sierra.
El amplificador de control de intensidad tiene además una entradaexterna a través de la cual podemos introducir señales para controlarla intensidad del haz. Esta entrada se denomina eje "Z" y en la mayoríade los osciloscopios no se encuentra ubicada en su parte frontal, sinoque lo está en la parte posterior del instrumento.
Si por ejemplo, introducimos una señal sinusoidal al canal verticaldel osciloscopio, utilizamos la base de tiempo en el canal horizontal yaplicamos una señal cuadrada en la entrada del eje "Z", en la pantalla delosciloscopio observaremos la forma de onda presentada en la Figura52.
La señal cuadrada está controlando el potencial de la grilla,haciéndolo más negativo durante ciertos intervalos de tiempo y menosnegativo durante otros, debido a lo cual la intensidad del haz disminuyedurante los primeros intervalos y aumenta durante los segundos.
Este efecto producido por las señales introducidas en el eje "Z"del osciloscopio puede utilizarse para medir frecuencias, como veremosmás adelante.
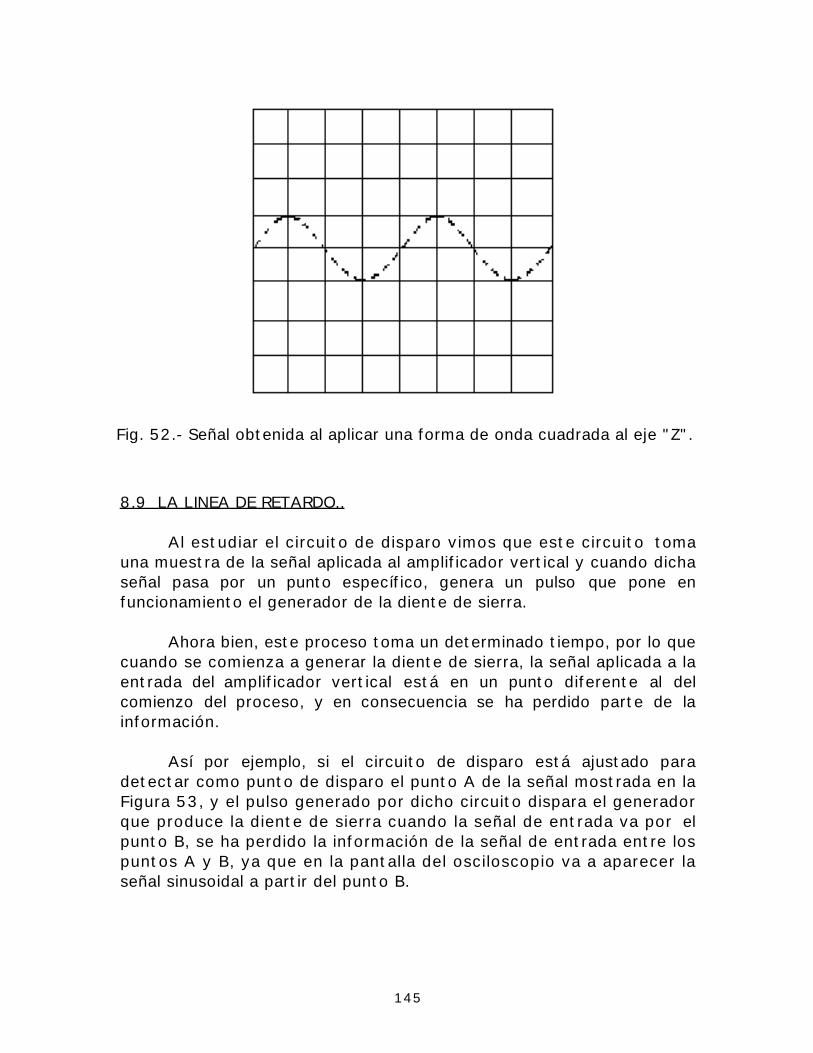
145
Fig. 52.- Señal obtenida al aplicar una forma de onda cuadrada al eje "Z".
8.9 LA LINEA DE RETARDO..
Al estudiar el circuito de disparo vimos que este circuito tomauna muestra de la señal aplicada al amplificador vertical y cuando dichaseñal pasa por un punto específico, genera un pulso que pone enfuncionamiento el generador de la diente de sierra.
Ahora bien, este proceso toma un determinado tiempo, por lo quecuando se comienza a generar la diente de sierra, la señal aplicada a laentrada del amplificador vertical está en un punto diferente al delcomienzo del proceso, y en consecuencia se ha perdido parte de lainformación.
Así por ejemplo, si el circuito de disparo está ajustado paradetectar como punto de disparo el punto A de la señal mostrada en laFigura 53, y el pulso generado por dicho circuito dispara el generadorque produce la diente de sierra cuando la señal de entrada va por elpunto B, se ha perdido la información de la señal de entrada entre lospuntos A y B, ya que en la pantalla del osciloscopio va a aparecer laseñal sinusoidal a partir del punto B.
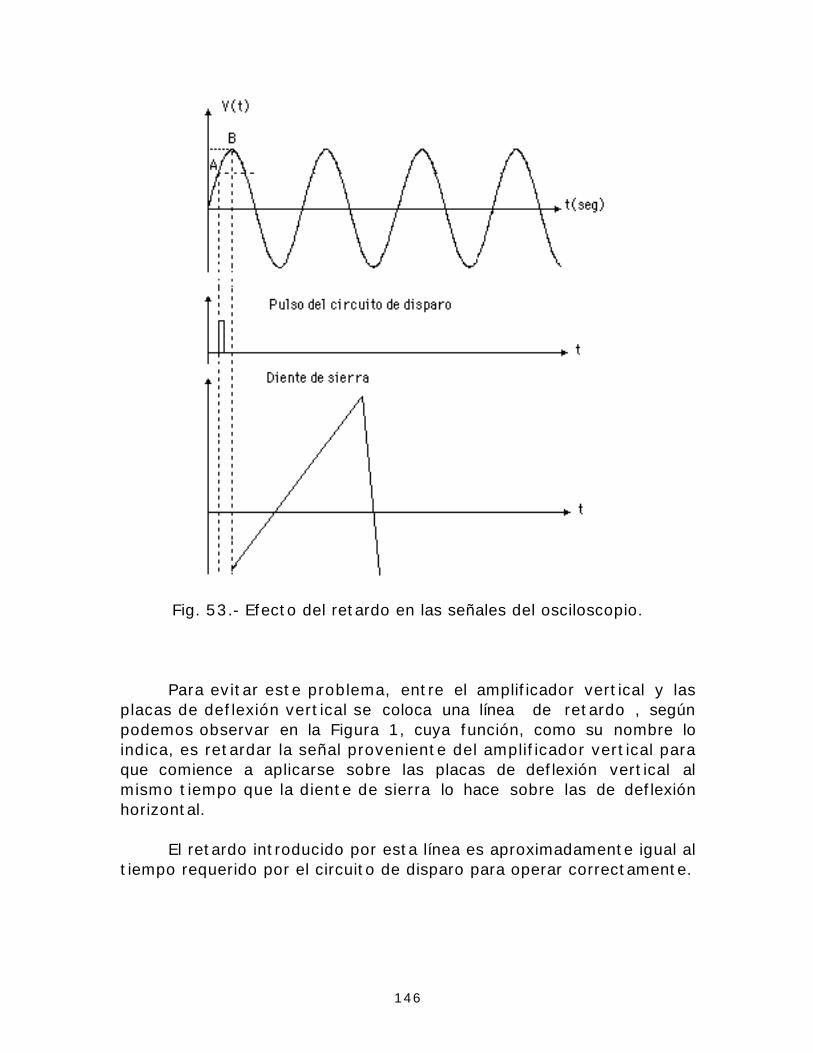
146
Fig. 53.- Efecto del retardo en las señales del osciloscopio.
Para evitar este problema, entre el amplificador vertical y lasplacas de deflexión vertical se coloca una línea de retardo , segúnpodemos observar en la Figura 1, cuya función, como su nombre loindica, es retardar la señal proveniente del amplificador vertical paraque comience a aplicarse sobre las placas de deflexión vertical almismo tiempo que la diente de sierra lo hace sobre las de deflexiónhorizontal.
El retardo introducido por esta línea es aproximadamente igual altiempo requerido por el circuito de disparo para operar correctamente.
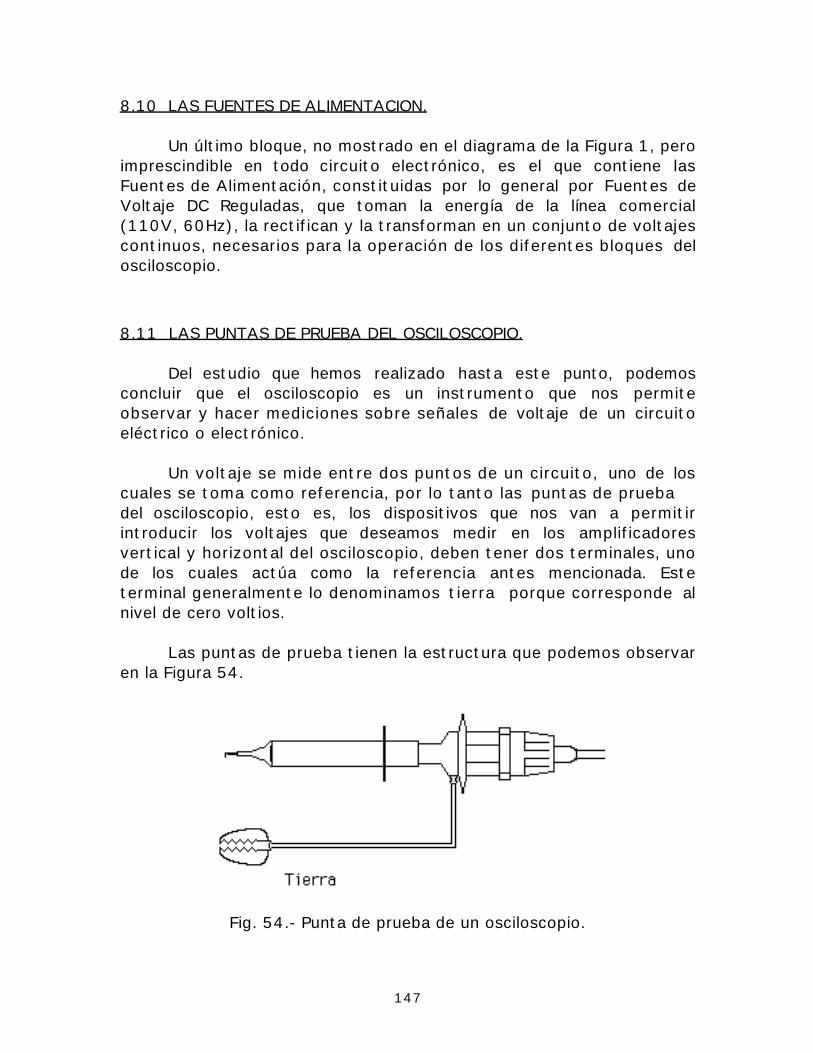
147
8.10 LAS FUENTES DE ALIMENTACION.
Un último bloque, no mostrado en el diagrama de la Figura 1, peroimprescindible en todo circuito electrónico, es el que contiene lasFuentes de Alimentación, constituidas por lo general por Fuentes deVoltaje DC Reguladas, que toman la energía de la línea comercial(110V, 60Hz), la rectifican y la transforman en un conjunto de voltajescontinuos, necesarios para la operación de los diferentes bloques delosciloscopio.
8.11 LAS PUNTAS DE PRUEBA DEL OSCILOSCOPIO.
Del estudio que hemos realizado hasta este punto, podemosconcluir que el osciloscopio es un instrumento que nos permiteobservar y hacer mediciones sobre señales de voltaje de un circuitoeléctrico o electrónico.
Un voltaje se mide entre dos puntos de un circuito, uno de loscuales se toma como referencia, por lo tanto las puntas de pruebadel osciloscopio, esto es, los dispositivos que nos van a permitirintroducir los voltajes que deseamos medir en los amplificadoresvertical y horizontal del osciloscopio, deben tener dos terminales, unode los cuales actúa como la referencia antes mencionada. Esteterminal generalmente lo denominamos tierra porque corresponde alnivel de cero voltios.
Las puntas de prueba tienen la estructura que podemos observaren la Figura 54.
Fig. 54.- Punta de prueba de un osciloscopio.
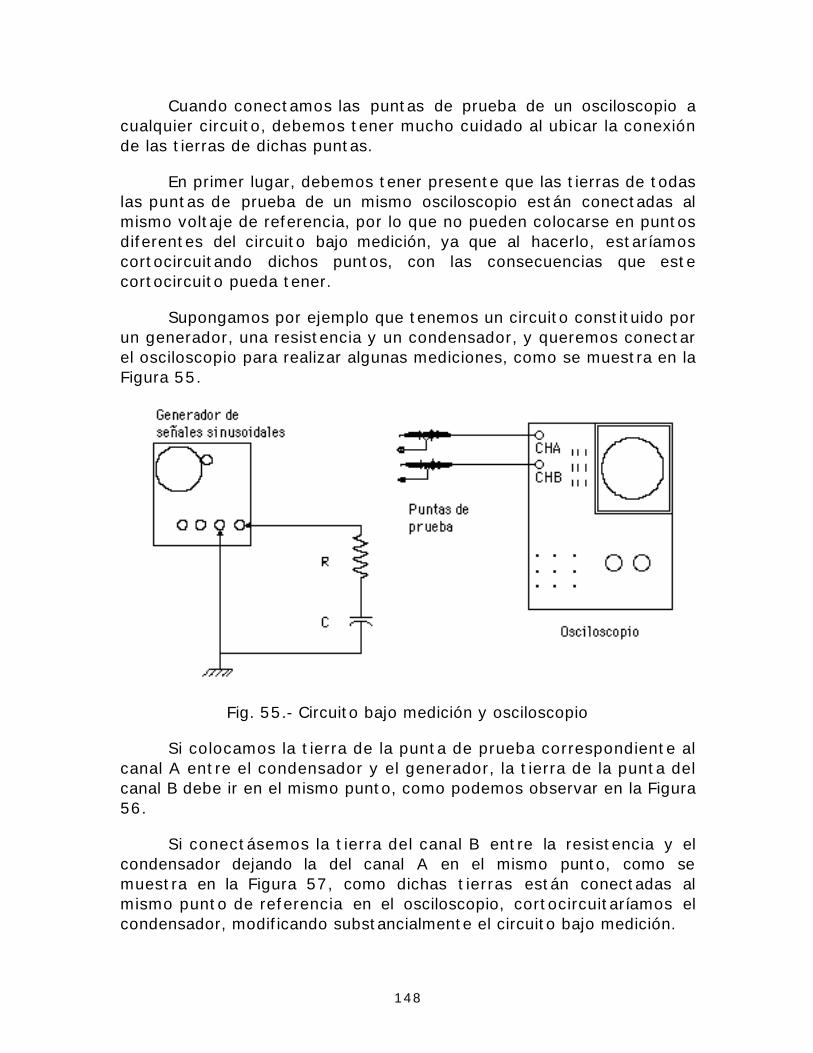
148
Cuando conectamos las puntas de prueba de un osciloscopio acualquier circuito, debemos tener mucho cuidado al ubicar la conexiónde las tierras de dichas puntas.
En primer lugar, debemos tener presente que las tierras de todaslas puntas de prueba de un mismo osciloscopio están conectadas almismo voltaje de referencia, por lo que no pueden colocarse en puntosdiferentes del circuito bajo medición, ya que al hacerlo, estaríamoscortocircuitando dichos puntos, con las consecuencias que estecortocircuito pueda tener.
Supongamos por ejemplo que tenemos un circuito constituido porun generador, una resistencia y un condensador, y queremos conectarel osciloscopio para realizar algunas mediciones, como se muestra en laFigura 55.
Fig. 55.- Circuito bajo medición y osciloscopio
Si colocamos la tierra de la punta de prueba correspondiente alcanal A entre el condensador y el generador, la tierra de la punta delcanal B debe ir en el mismo punto, como podemos observar en la Figura56.
Si conectásemos la tierra del canal B entre la resistencia y elcondensador dejando la del canal A en el mismo punto, como semuestra en la Figura 57, como dichas tierras están conectadas almismo punto de referencia en el osciloscopio, cortocircuitaríamos elcondensador, modificando substancialmente el circuito bajo medición.
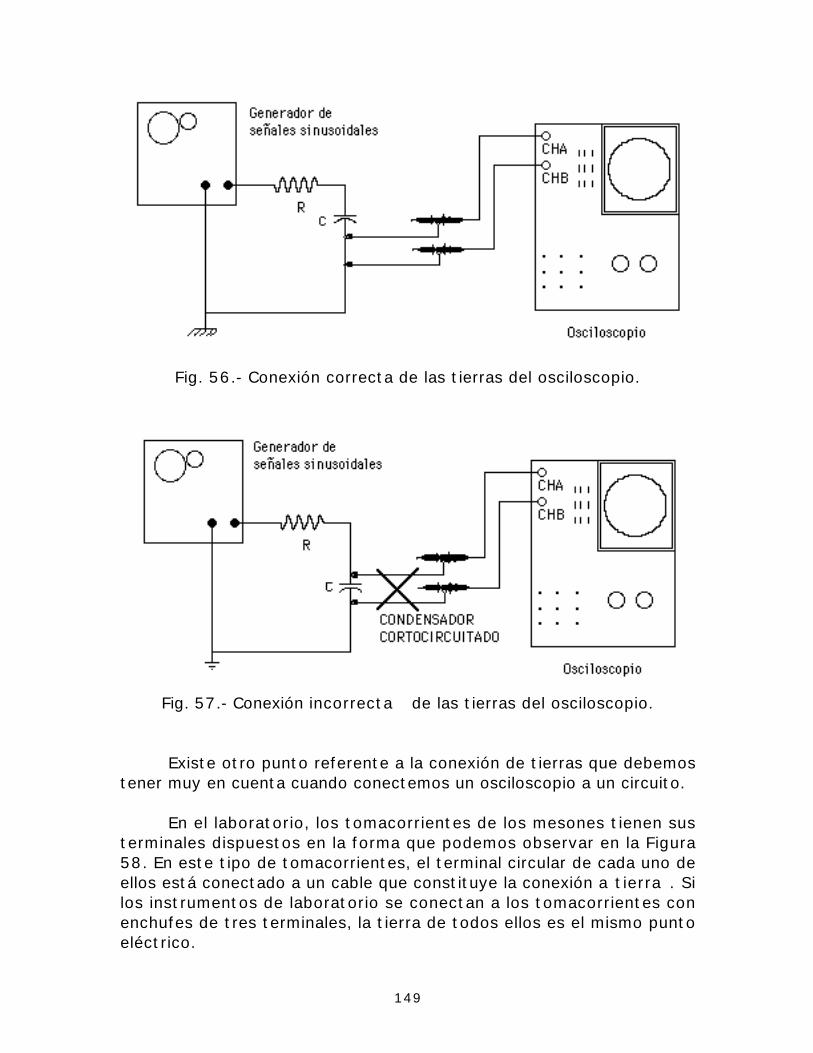
149
Fig. 56.- Conexión correcta de las tierras del osciloscopio.
Fig. 57.- Conexión incorrecta de las tierras del osciloscopio.
Existe otro punto referente a la conexión de tierras que debemostener muy en cuenta cuando conectemos un osciloscopio a un circuito.
En el laboratorio, los tomacorrientes de los mesones tienen susterminales dispuestos en la forma que podemos observar en la Figura58. En este tipo de tomacorrientes, el terminal circular de cada uno deellos está conectado a un cable que constituye la conexión a tierra . Silos instrumentos de laboratorio se conectan a los tomacorrientes conenchufes de tres terminales, la tierra de todos ellos es el mismo puntoeléctrico.
150
Fig. 58.- Tomacorrientes de los mesones del laboratorio.
Así por ejemplo, si el generador de señales y el osciloscopiopresentados en las Figuras 56 y 57 están conectados a lostomacorrientes con enchufes de tres terminales, el punto de tierra deambos instrumentos es común.
Esto significa que debemos conectar las tierras de las puntas deprueba del osciloscopio únicamente en el punto del circuito donde seencuentre la del generador, porque de hacerlo en cualquier otro punto,cortocircuitaríamos algunos elementos del circuito. Por lo tanto, enestas circunstancias, la única conexión correcta es la mostrada enla Figura 56.
Ahora bien, en algunos casos necesitamos ubicar las tierras delas puntas de prueba del osciloscopio en un punto eléctrico diferente alde la tierra del generador.
Vamos a utilizar el mismo ejemplo anterior para estudiar estehecho. Si queremos observar simultáneamente el voltaje en elcondensador y el voltaje en la resistencia, tenemos que conectar latierra del osciloscopio entre la resistencia y el condensador, comopodemos observar en la Figura 59.
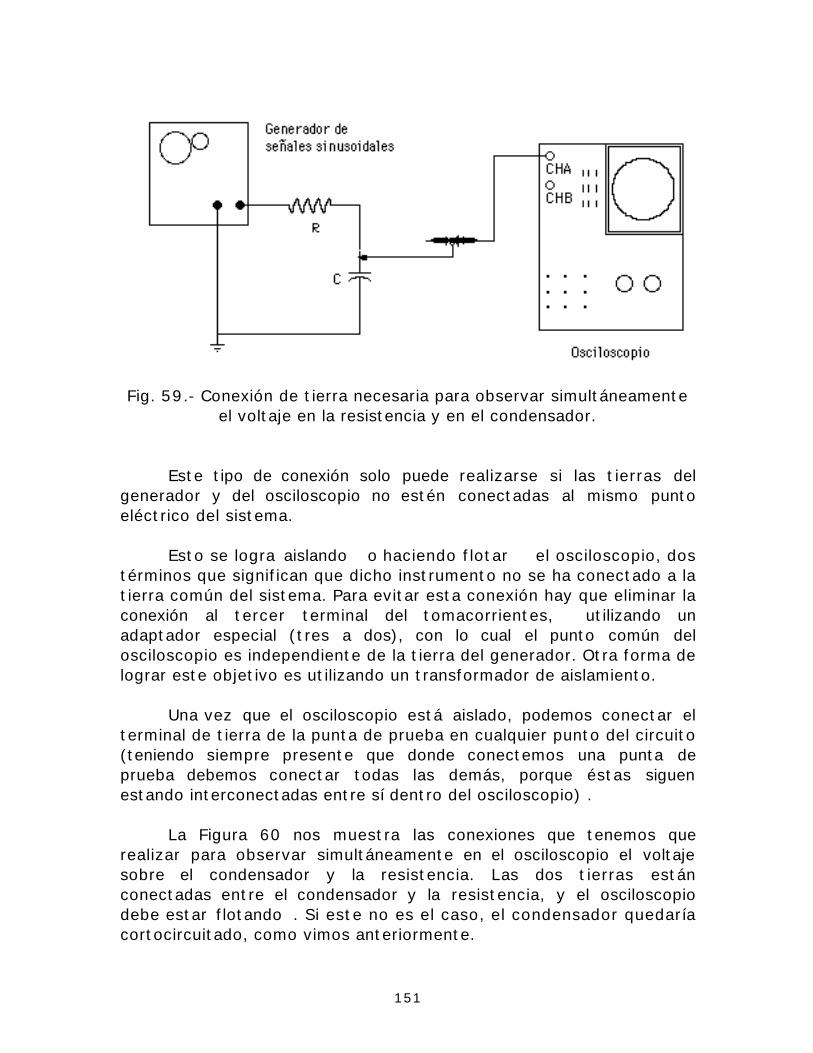
151
Fig. 59.- Conexión de tierra necesaria para observar simultáneamenteel voltaje en la resistencia y en el condensador.
Este tipo de conexión solo puede realizarse si las tierras delgenerador y del osciloscopio no estén conectadas al mismo puntoeléctrico del sistema.
Esto se logra aislando o haciendo flotar el osciloscopio, dostérminos que significan que dicho instrumento no se ha conectado a latierra común del sistema. Para evitar esta conexión hay que eliminar laconexión al tercer terminal del tomacorrientes, utilizando unadaptador especial (tres a dos), con lo cual el punto común delosciloscopio es independiente de la tierra del generador. Otra forma delograr este objetivo es utilizando un transformador de aislamiento.
Una vez que el osciloscopio está aislado, podemos conectar elterminal de tierra de la punta de prueba en cualquier punto del circuito(teniendo siempre presente que donde conectemos una punta deprueba debemos conectar todas las demás, porque éstas siguenestando interconectadas entre sí dentro del osciloscopio) .
La Figura 60 nos muestra las conexiones que tenemos querealizar para observar simultáneamente en el osciloscopio el voltajesobre el condensador y la resistencia. Las dos tierras estánconectadas entre el condensador y la resistencia, y el osciloscopiodebe estar flotando . Si este no es el caso, el condensador quedaríacortocircuitado, como vimos anteriormente.
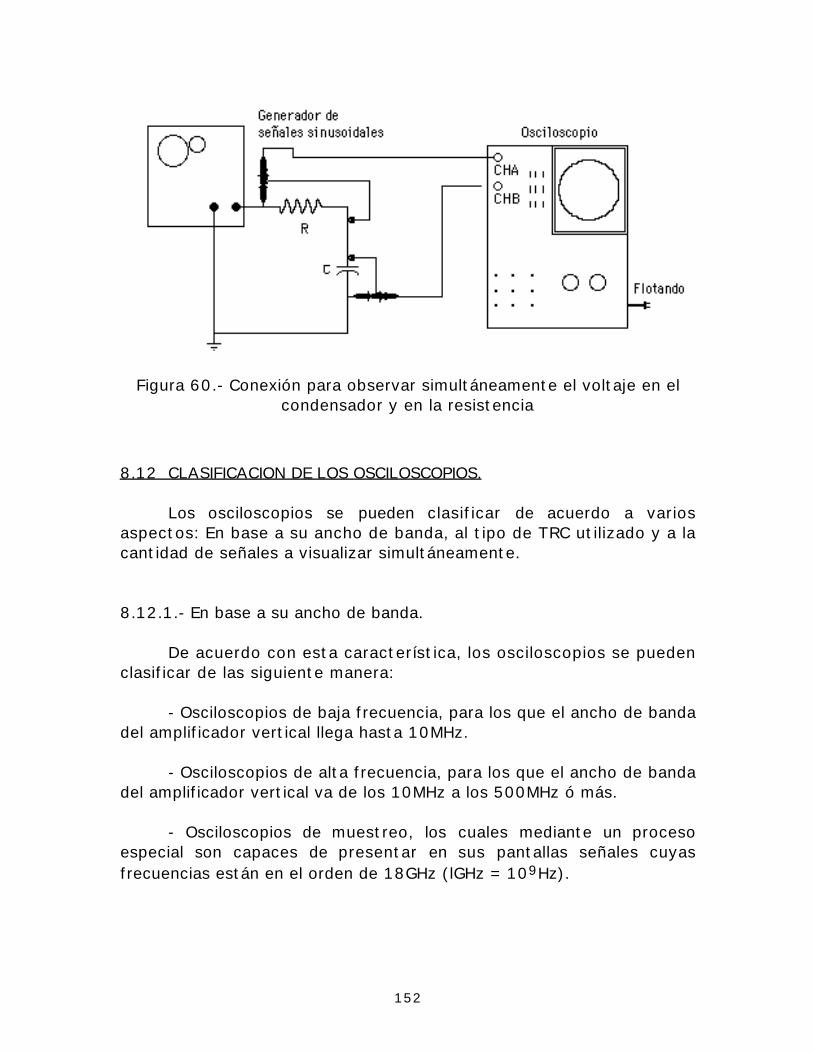
152
Figura 60.- Conexión para observar simultáneamente el voltaje en elcondensador y en la resistencia
8.12 CLASIFICACION DE LOS OSCILOSCOPIOS.
Los osciloscopios se pueden clasificar de acuerdo a variosaspectos: En base a su ancho de banda, al tipo de TRC utilizado y a lacantidad de señales a visualizar simultáneamente.
8.12.1.- En base a su ancho de banda.
De acuerdo con esta característica, los osciloscopios se puedenclasificar de las siguiente manera:
- Osciloscopios de baja frecuencia, para los que el ancho de bandadel amplificador vertical llega hasta 10MHz.
- Osciloscopios de alta frecuencia, para los que el ancho de bandadel amplificador vertical va de los 10MHz a los 500MHz ó más.
- Osciloscopios de muestreo, los cuales mediante un procesoespecial son capaces de presentar en sus pantallas señales cuyasfrecuencias están en el orden de 18GHz (lGHz = 109Hz).
153
8.12.2.- En base al tipo de TRC utilizado.
- Osciloscopios de fósforo "standard", los cuales tienen unapantalla recubierta con un tipo de fósforo que emite luz cuando incideel haz sobre él, y deja de emitir en el momento que cesa la incidencia.
- Osciloscopios de memoria, los cuales continúan presentando laimagen en la pantalla aún después que cesa la incidencia del haz,gracias a un fósforo de gran remanencia y a un sistema especial dealmacenamiento. Se utilizan para estudiar señales no periódicas.
8.12.3.- En base a la cantidad de señales a visualizar en formasimultánea.
- Osciloscopios de un solo cañón electrónico, capaces depresentar una sola señal sobre la pantalla.
- Osciloscopios de dos o tres cañones electrónicos, capaces depresentar dos o tres señales simultáneas sobre la pantalla (su costoes muy elevado y actualmente están en desuso).
- Osciloscopios de un solo cañón electrónico, capaces depresentar dos, tres o cuatro señales simultáneas sobre la pantallagracias a sistemas electrónicos de gran velocidad. El funcionamiento deeste tipo de osciloscopios se detalla en el próximo punto.
8.13 SISTEMAS PARA PRESENTAR DOS O MAS SEÑALES SIMULTANEASSOBRE LA PANTALLA DE UN OSCILOSCOPIO CON UN CAÑON.
La gran mayoría de los osciloscopios comerciales son capaces depresentar por lo menos dos señales simultáneas, y en algunos casoshasta cuatro, a pesar de que solamente cuentan con un cañónelectrónico.
En el panel frontal de estos osciloscopios hay un conector deentrada para cada uno de los canales, y cada uno de ellos tieneasociado un amplificador vertical con todos los controlescorrespondientes. Una vez que las señales están listas, se combinan enun circuito diseñado para tal fin antes de ser aplicadas a las placas dedeflexión vertical.
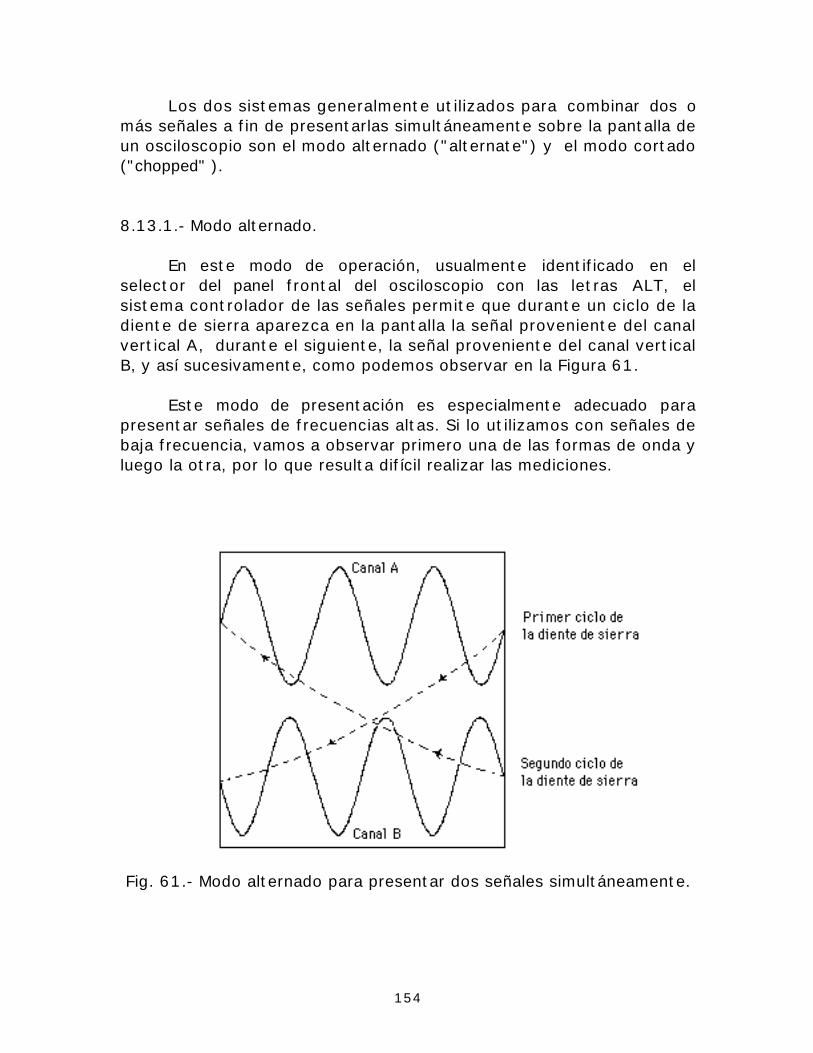
154
Los dos sistemas generalmente utilizados para combinar dos omás señales a fin de presentarlas simultáneamente sobre la pantalla deun osciloscopio son el modo alternado ("alternate") y el modo cortado("chopped" ).
8.13.1.- Modo alternado.
En este modo de operación, usualmente identificado en elselector del panel frontal del osciloscopio con las letras ALT, elsistema controlador de las señales permite que durante un ciclo de ladiente de sierra aparezca en la pantalla la señal proveniente del canalvertical A, durante el siguiente, la señal proveniente del canal verticalB, y así sucesivamente, como podemos observar en la Figura 61.
Este modo de presentación es especialmente adecuado parapresentar señales de frecuencias altas. Si lo utilizamos con señales debaja frecuencia, vamos a observar primero una de las formas de onda yluego la otra, por lo que resulta difícil realizar las mediciones.
Fig. 61.- Modo alternado para presentar dos señales simultáneamente.
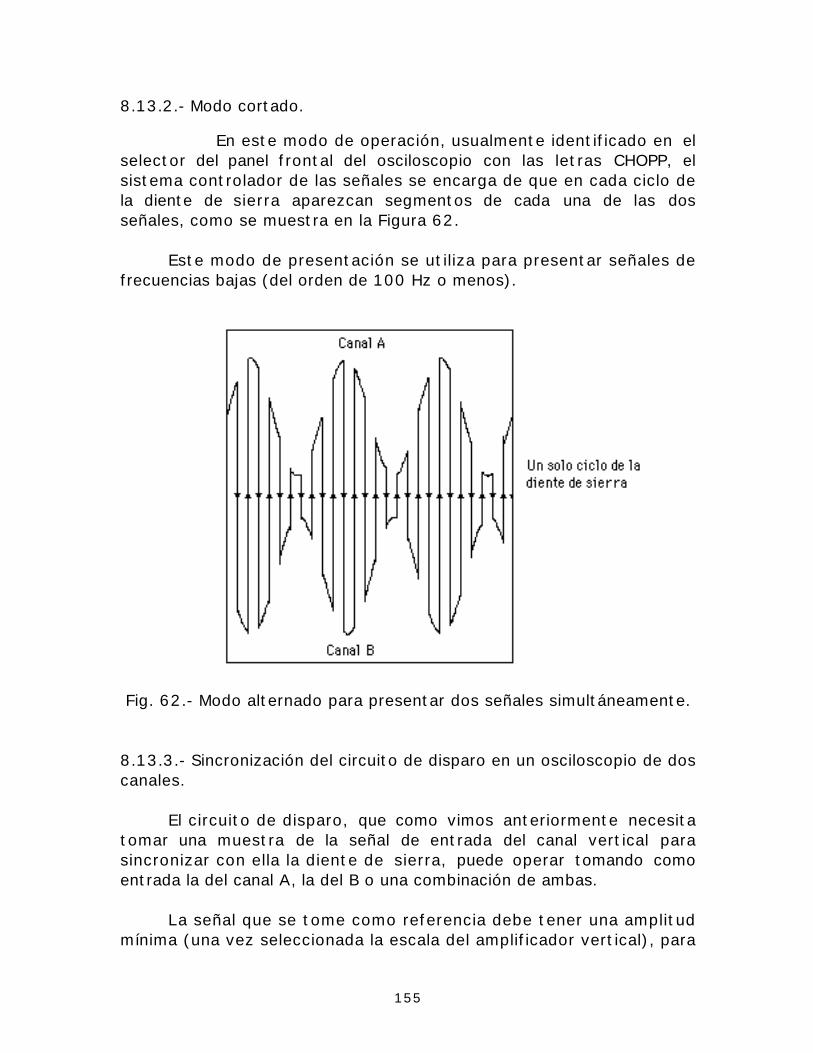
155
8.13.2.- Modo cortado.
En este modo de operación, usualmente identificado en elselector del panel frontal del osciloscopio con las letras CHOPP, elsistema controlador de las señales se encarga de que en cada ciclo dela diente de sierra aparezcan segmentos de cada una de las dosseñales, como se muestra en la Figura 62.
Este modo de presentación se utiliza para presentar señales defrecuencias bajas (del orden de 100 Hz o menos).
Fig. 62.- Modo alternado para presentar dos señales simultáneamente.
8.13.3.- Sincronización del circuito de disparo en un osciloscopio de doscanales.
El circuito de disparo, que como vimos anteriormente necesitatomar una muestra de la señal de entrada del canal vertical parasincronizar con ella la diente de sierra, puede operar tomando comoentrada la del canal A, la del B o una combinación de ambas.
La señal que se tome como referencia debe tener una amplitudmínima (una vez seleccionada la escala del amplificador vertical), para
156
que el circuito de disparo pueda trabajar correctamente. Si dicha señaltiene una magnitud demasiado pequeña, las formas de onda no seestabilizarán en la pantalla, y será prácticamente imposible quepodamos realizar las mediciones necesarias.
8.14 MEDICIONES CON EL OSCILOSCOPIO.
El osciloscopio es un instrumento muy versátil con el que sepueden realizar una gran cantidad de mediciones, entre las cuales lasmás usuales son las de voltajes, corrientes, frecuencias y desfasajes .
8.14.1.- Medición de Voltajes.
Como vimos anteriormente, el selector del amplificador verticaldel osciloscopio está calibrado en unidades de voltaje por división de lacuadrícula de la pantalla, por lo tanto, esta medición la podemosrealizar en forma directa.
Los osciloscopios presentan en general una impedancia deentrada bastante alta (del orden de 1MΩ) comparada con la resistenciainterna de la mayoría de los voltímetros, sobre todo de los diseñadospara medir voltajes pequeños. Sin embargo, hay voltímetros quepresentan una resistencia interna mayor de 1MΩ, especialmente en lasescalas diseñadas para medir voltajes elevados (del orden de lasdecenas o centenas de voltios), por lo tanto, aunque en generalpodemos considerar que, desde el punto de vista de la cargaintroducida por el instrumento de medición de voltaje en un circuito, elosciloscopio es preferible al voltímetro, hay que analizar cada caso enparticular.
Además, el osciloscopio presenta tres ventajas sobre elvoltímetro:
- El osciloscopio puede medir voltajes alternos o continuos sinnecesidad de utilizar un dispositivo especial, mientras que losvoltímetros que miden voltajes alternos requieren un circuitorectificador.
- Los osciloscopios pueden presentar en su pantalla señales quetengan tanto componentes alternas como continuas, y realizar lasmediciones de cada una de las componentes por separado, utilizando
157
los modos de acoplamiento AC y DC, como vimos en el puntocorrespondiente al amplificador vertical, mientras que un voltímetro enparticular puede medir voltajes alternos o continuos, pero no los dossimultáneamente.
- El ancho de banda de los osciloscopios es muy superior al de losvoltímetros.
El procedimiento a seguir para medir voltajes DC en la pantalla delosciloscopio es el siguiente:
Paso 1- Conectamos la punta de prueba en un canal vertical, porejemplo, en el identificado como canal 1.
Paso 2.- Ubicamos el selector de imagen en CH1 (si no hace faltaobservar dos canales simultáneamente).
Paso 3.- Ubicamos el selector de disparo de base de tiempo enCH1, para sincronizar adecuadamente la diente de sierra.
Paso 4.- Ubicamos el control de calibración de la escala horizontalen una posición tal que veamos una línea continua en la pantalla (por
ejemplo, 1 mseg d iv )
Paso 5.- Con el selector de acoplamiento de la señal en "Tierra"(GND), ubicamos la línea de 0V en el centro de la pantalla, utilizandopara ello el ajuste de posición vertical. Esto nos permite medir voltajestanto positivos como negativos. Si ya conocemos la polaridad de laseñal, podemos pasar directamente al paso 8.
Paso 6.- Pasamos el selector de acoplamiento a la posición DC,para aplicar la señal al canal vertical.
Paso 7.- Ajustamos el control de calibración de la escala verticalhasta que podamos observar claramente si la señal es positiva (sedesplaza hacia la parte superior de la pantalla) o negativa (se desplazahacia la parte inferior de la pantalla).
Paso 8.- Ponemos el selector de acoplamiento nuevamente enGND y hacemos coincidir la línea de 0V con la línea inferior de la pantallasi el voltaje es positivo o con la línea superior de la pantalla si el voltajees negativo. De esta manera obtenemos el máximo rango de medición.
158
Paso 9.- Con el selector de acoplamiento en DC, ajustamos elcontrol de calibración de la escala vertical hasta lograr la máximaseparación posible (sin que la línea se salga de pantalla) entre laposición de 0V y la línea de señal.
Paso 10.- Contamos el número de divisiones entre la posición de0V y la línea de señal y multiplicamos por el número indicado en elcontrol de calibración de la escala vertical. Este es el valor del voltajede la señal DC.
Para medir voltajes AC en la pantalla del osciloscopio procedemosde la siguiente forma:
Paso 1.- Seguimos los pasos 1, 2 y 3 del procedimiento paramedir voltajes DC.
Paso 2.- Ubicamos el control de calibración de la escala horizontalen una posición tal que podamos observar unos pocos ciclos de la señal.
Paso 3.- Con el selector de acoplamiento de la señal en GND,ubicamos la línea de 0V en el centro de la pantalla, utilizando para elloel ajuste de posición vertical.
Paso 4.- Pasamos el selector de acoplamiento a la posición AC.De esta manera estamos filtrando cualquier componente DC quecontenga la señal.
Paso 5.- Ajustamos el control de calibración de la escala verticalhasta que podamos observar la señal más grande sin que se salga depantalla.
Paso 6.- Hacemos coincidir el extremo inferior de la señal con lalínea inferior de la pantalla.
Paso 7.- Contamos el número de divisiones y subdivisiones (por logeneral cada subdivisión es 0,2 divisiones) entre el extremo inferior yel superior de la señal y lo multiplicamos por el número indicado en elcontrol de calibración de la escala vertical. Este es el voltaje pico a picode la señal AC.
159
8.14.2.- Medición de Corrientes.
La medición de corrientes con el osciloscopio se realiza en formaindirecta.
En el circuito donde deseamos medir la corriente introducimosuna resistencia cuyo valor sea mucho menor que las resistencia de larama correspondiente, y medimos con el osciloscopio el voltajeexistente entre los terminales de dicha resistencia de prueba. A partirde esta medición y del valor de la resistencia calculamos el de lacorriente aplicando la ley de Ohm.
Como podemos escoger el valor de la resistencia que vamos aintroducir en el circuito, tenemos la posibilidad de reducir al máximo elerror sistemático debido al método de medición.
8.14.3.- Medición de Frecuencias.
Existen varios métodos para medir frecuencias, algunos de loscuales presentan un alto grado de sofisticación. A continuación vamosa analizar tres de ellos.
8.14.3.1.- Método indirecto utilizando la calibración de tiempo deleje horizontal.
Como vimos anteriormente, cuando la diente de sierra estáconectada a las placas de deflexión horizontal, mediante el selectorcorrespondiente podemos escoger el tiempo asignado a cada división dela pantalla del osciloscopio, con lo cual podemos medir directamentesobre dicha pantalla el período de la señal bajo estudio, que es igual alinverso de la frecuencia.
La exactitud de esta medición depende de la exactitud de lacalibración del eje horizontal.
El procedimiento para medir frecuencias con este método es elsiguiente:
Paso 1.- Seguimos los pasos 1 al 5 del procedimiento para medirvoltajes AC.
Paso 2.- Contamos el número de divisiones y subdivisioneshorizontales entre dos máximos, dos mínimos o dos cruces por cero de
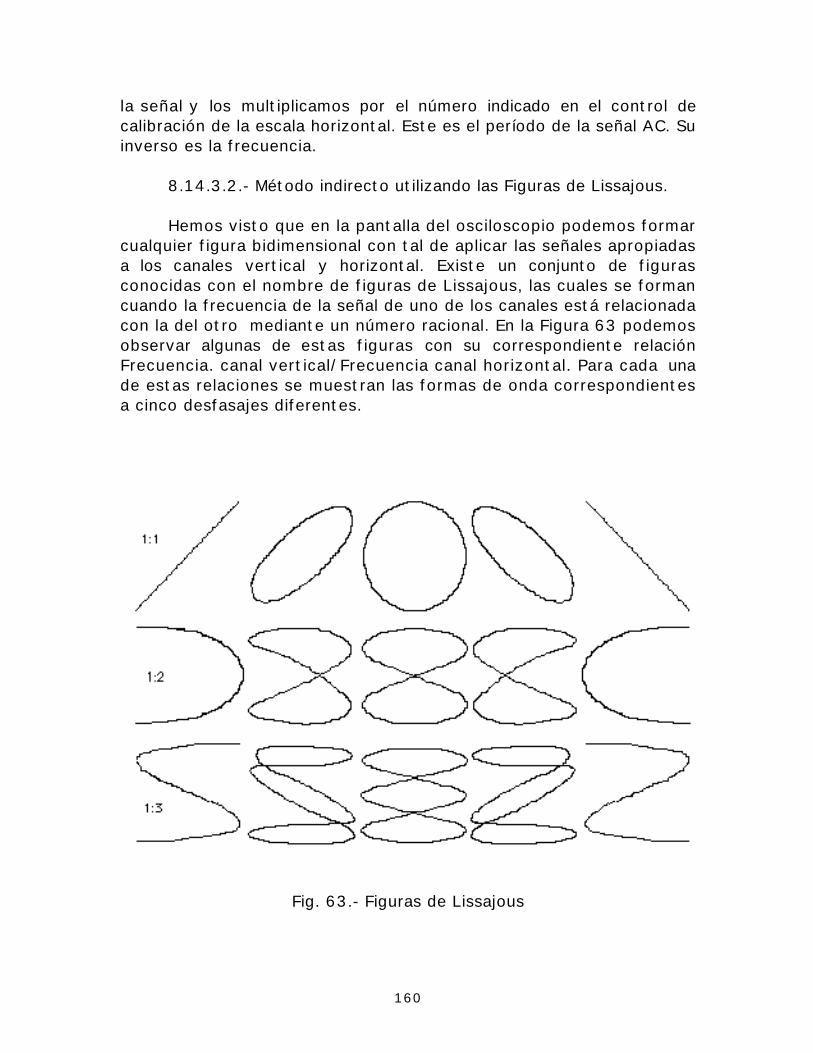
160
la señal y los multiplicamos por el número indicado en el control decalibración de la escala horizontal. Este es el período de la señal AC. Suinverso es la frecuencia.
8.14.3.2.- Método indirecto utilizando las Figuras de Lissajous.
Hemos visto que en la pantalla del osciloscopio podemos formarcualquier figura bidimensional con tal de aplicar las señales apropiadasa los canales vertical y horizontal. Existe un conjunto de figurasconocidas con el nombre de figuras de Lissajous, las cuales se formancuando la frecuencia de la señal de uno de los canales está relacionadacon la del otro mediante un número racional. En la Figura 63 podemosobservar algunas de estas figuras con su correspondiente relaciónFrecuencia. canal vertical/Frecuencia canal horizontal. Para cada unade estas relaciones se muestran las formas de onda correspondientesa cinco desfasajes diferentes.
Fig. 63.- Figuras de Lissajous
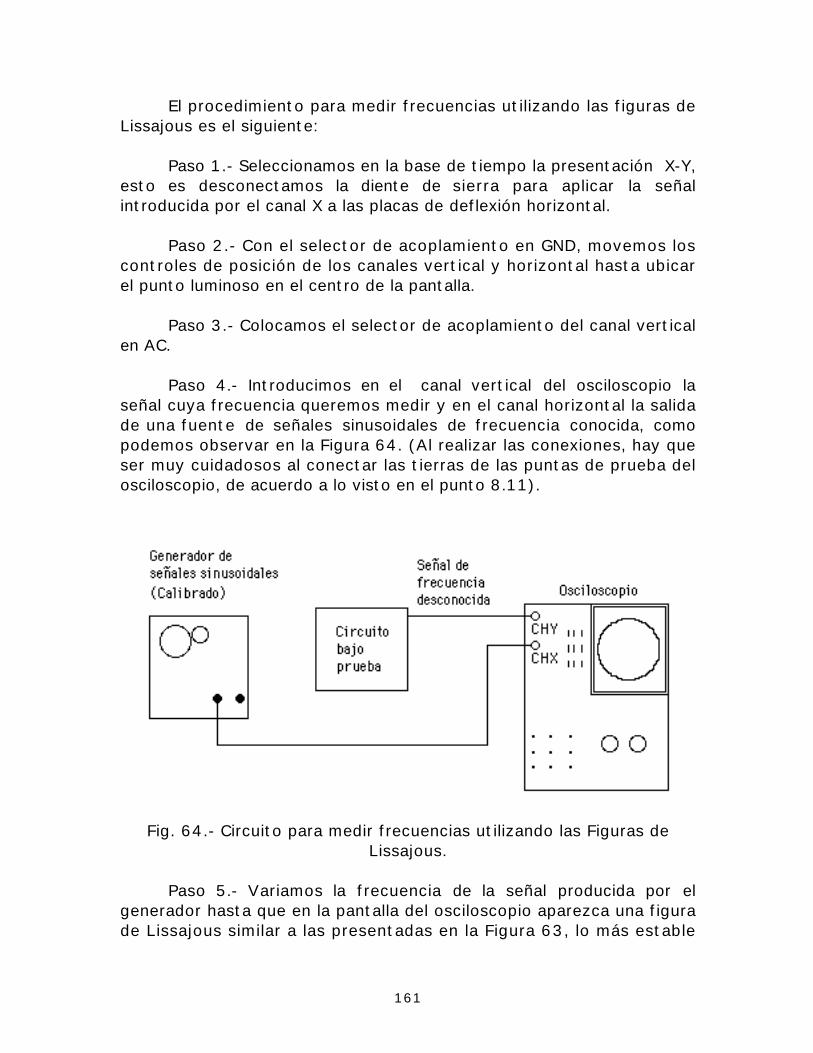
161
El procedimiento para medir frecuencias utilizando las figuras deLissajous es el siguiente:
Paso 1.- Seleccionamos en la base de tiempo la presentación X-Y,esto es desconectamos la diente de sierra para aplicar la señalintroducida por el canal X a las placas de deflexión horizontal.
Paso 2.- Con el selector de acoplamiento en GND, movemos loscontroles de posición de los canales vertical y horizontal hasta ubicarel punto luminoso en el centro de la pantalla.
Paso 3.- Colocamos el selector de acoplamiento del canal verticalen AC.
Paso 4.- Introducimos en el canal vertical del osciloscopio laseñal cuya frecuencia queremos medir y en el canal horizontal la salidade una fuente de señales sinusoidales de frecuencia conocida, comopodemos observar en la Figura 64. (Al realizar las conexiones, hay queser muy cuidadosos al conectar las tierras de las puntas de prueba delosciloscopio, de acuerdo a lo visto en el punto 8.11).
Fig. 64.- Circuito para medir frecuencias utilizando las Figuras deLissajous.
Paso 5.- Variamos la frecuencia de la señal producida por elgenerador hasta que en la pantalla del osciloscopio aparezca una figurade Lissajous similar a las presentadas en la Figura 63, lo más estable
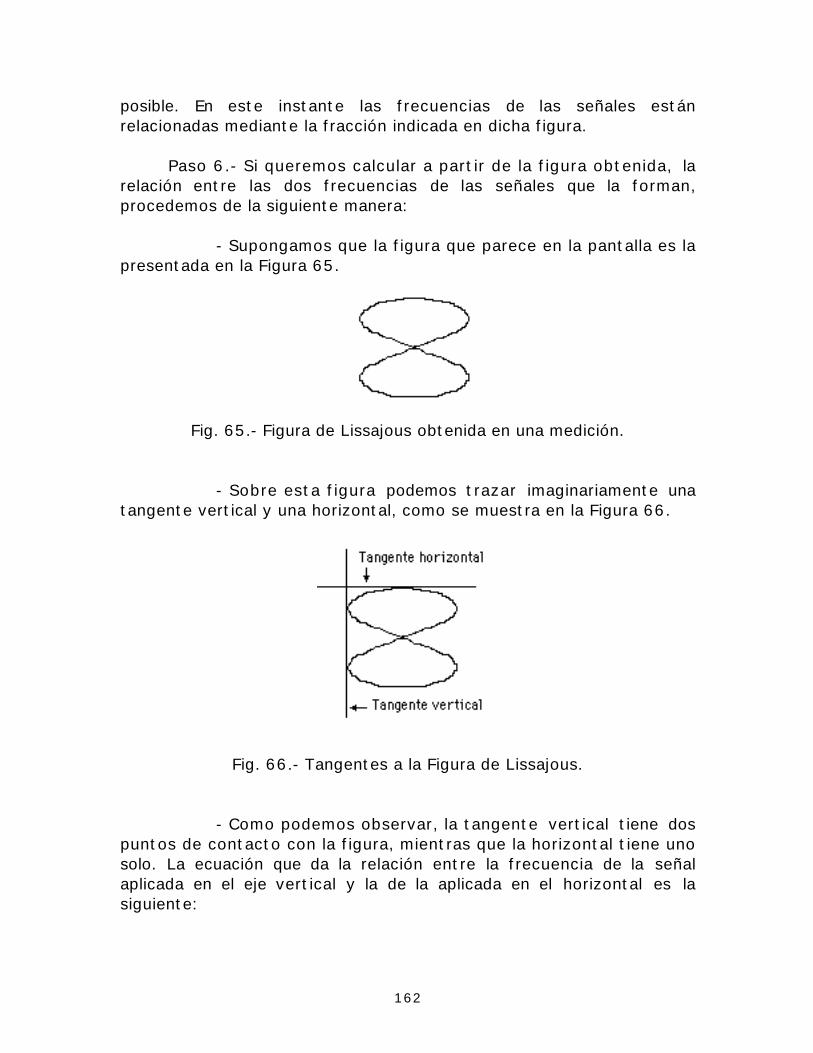
162
posible. En este instante las frecuencias de las señales estánrelacionadas mediante la fracción indicada en dicha figura.
Paso 6.- Si queremos calcular a partir de la figura obtenida, larelación entre las dos frecuencias de las señales que la forman,procedemos de la siguiente manera:
- Supongamos que la figura que parece en la pantalla es lapresentada en la Figura 65.
Fig. 65.- Figura de Lissajous obtenida en una medición.
- Sobre esta figura podemos trazar imaginariamente unatangente vertical y una horizontal, como se muestra en la Figura 66.
Fig. 66.- Tangentes a la Figura de Lissajous.
- Como podemos observar, la tangente vertical tiene dospuntos de contacto con la figura, mientras que la horizontal tiene unosolo. La ecuación que da la relación entre la frecuencia de la señalaplicada en el eje vertical y la de la aplicada en el horizontal es lasiguiente:
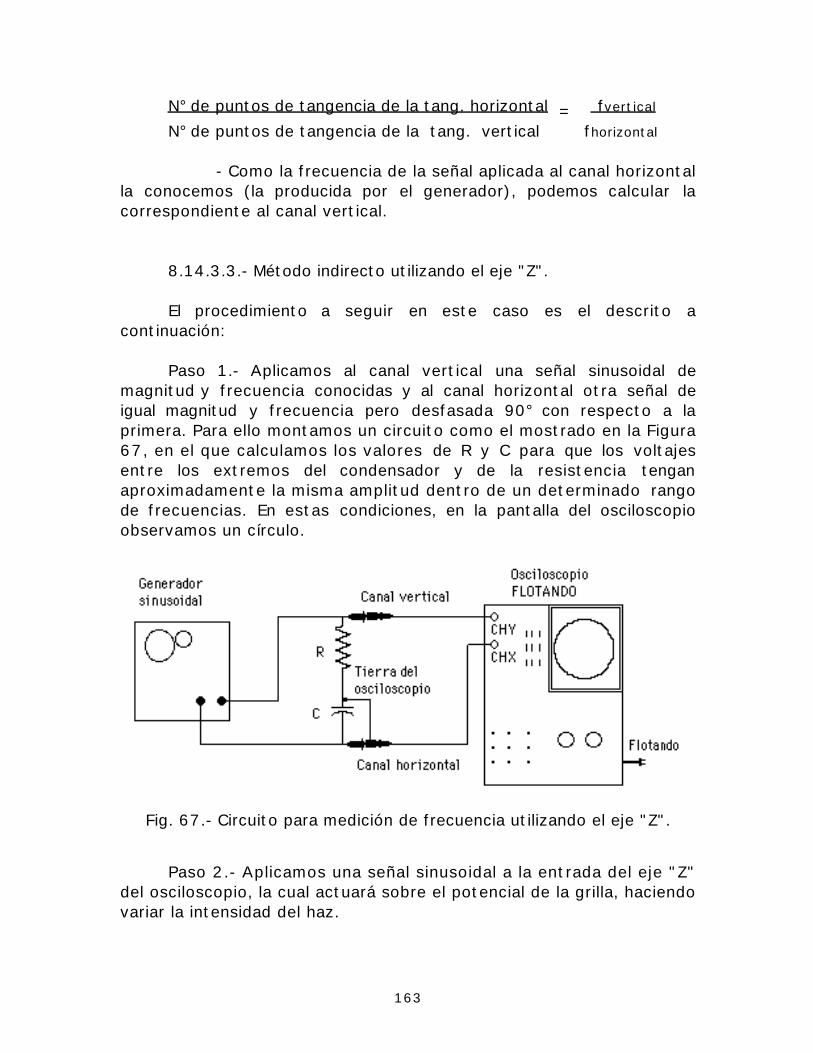
163
N° de puntos de tangencia de la tang. horizontal = fvertical
N° de puntos de tangencia de la tang. vertical fhorizontal
- Como la frecuencia de la señal aplicada al canal horizontalla conocemos (la producida por el generador), podemos calcular lacorrespondiente al canal vertical.
8.14.3.3.- Método indirecto utilizando el eje "Z".
El procedimiento a seguir en este caso es el descrito acontinuación:
Paso 1.- Aplicamos al canal vertical una señal sinusoidal demagnitud y frecuencia conocidas y al canal horizontal otra señal deigual magnitud y frecuencia pero desfasada 90° con respecto a laprimera. Para ello montamos un circuito como el mostrado en la Figura67, en el que calculamos los valores de R y C para que los voltajesentre los extremos del condensador y de la resistencia tenganaproximadamente la misma amplitud dentro de un determinado rangode frecuencias. En estas condiciones, en la pantalla del osciloscopioobservamos un círculo.
Fig. 67.- Circuito para medición de frecuencia utilizando el eje "Z".
Paso 2.- Aplicamos una señal sinusoidal a la entrada del eje "Z"del osciloscopio, la cual actuará sobre el potencial de la grilla, haciendovariar la intensidad del haz.
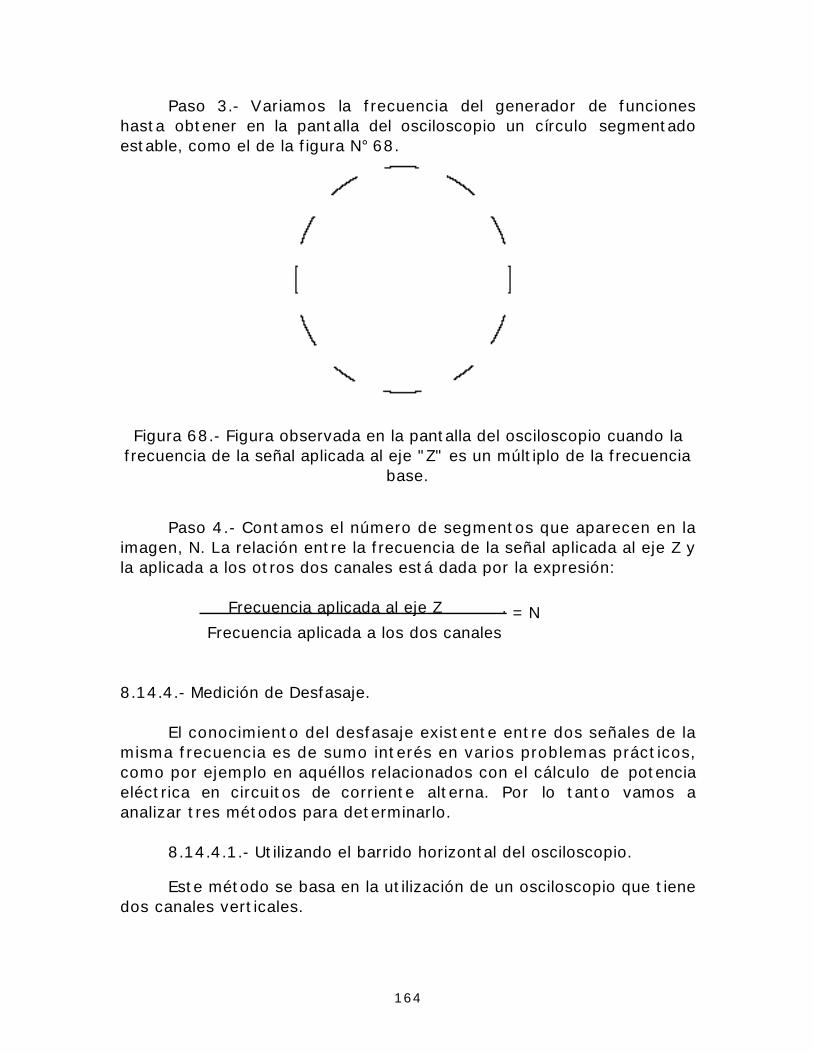
164
Paso 3.- Variamos la frecuencia del generador de funcioneshasta obtener en la pantalla del osciloscopio un círculo segmentadoestable, como el de la figura N° 68.
Figura 68.- Figura observada en la pantalla del osciloscopio cuando lafrecuencia de la señal aplicada al eje "Z" es un múltiplo de la frecuencia
base.
Paso 4.- Contamos el número de segmentos que aparecen en laimagen, N. La relación entre la frecuencia de la señal aplicada al eje Z yla aplicada a los otros dos canales está dada por la expresión:
Frecuencia aplicada al eje Z . = N Frecuencia aplicada a los dos canales
8.14.4.- Medición de Desfasaje.
El conocimiento del desfasaje existente entre dos señales de lamisma frecuencia es de sumo interés en varios problemas prácticos,como por ejemplo en aquéllos relacionados con el cálculo de potenciaeléctrica en circuitos de corriente alterna. Por lo tanto vamos aanalizar tres métodos para determinarlo.
8.14.4.1.- Utilizando el barrido horizontal del osciloscopio.
Este método se basa en la utilización de un osciloscopio que tienedos canales verticales.
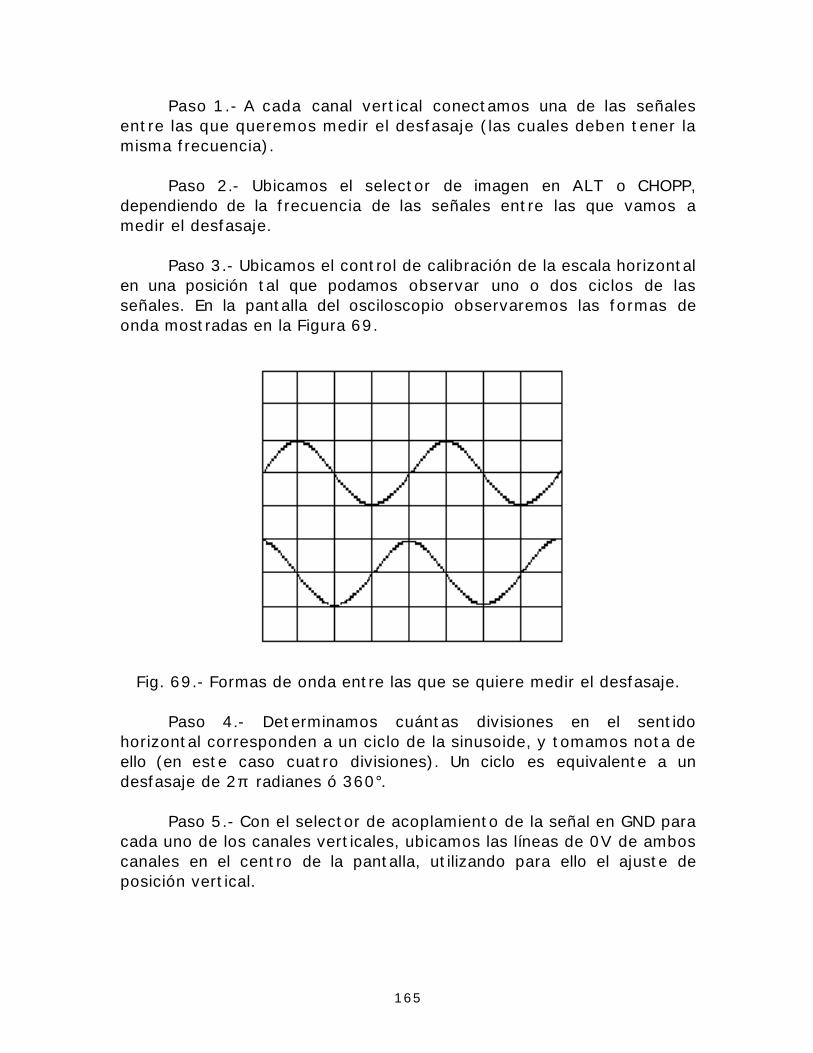
165
Paso 1.- A cada canal vertical conectamos una de las señalesentre las que queremos medir el desfasaje (las cuales deben tener lamisma frecuencia).
Paso 2.- Ubicamos el selector de imagen en ALT o CHOPP,dependiendo de la frecuencia de las señales entre las que vamos amedir el desfasaje.
Paso 3.- Ubicamos el control de calibración de la escala horizontalen una posición tal que podamos observar uno o dos ciclos de lasseñales. En la pantalla del osciloscopio observaremos las formas deonda mostradas en la Figura 69.
Fig. 69.- Formas de onda entre las que se quiere medir el desfasaje.
Paso 4.- Determinamos cuántas divisiones en el sentidohorizontal corresponden a un ciclo de la sinusoide, y tomamos nota deello (en este caso cuatro divisiones). Un ciclo es equivalente a undesfasaje de 2π radianes ó 360°.
Paso 5.- Con el selector de acoplamiento de la señal en GND paracada uno de los canales verticales, ubicamos las líneas de 0V de amboscanales en el centro de la pantalla, utilizando para ello el ajuste deposición vertical.
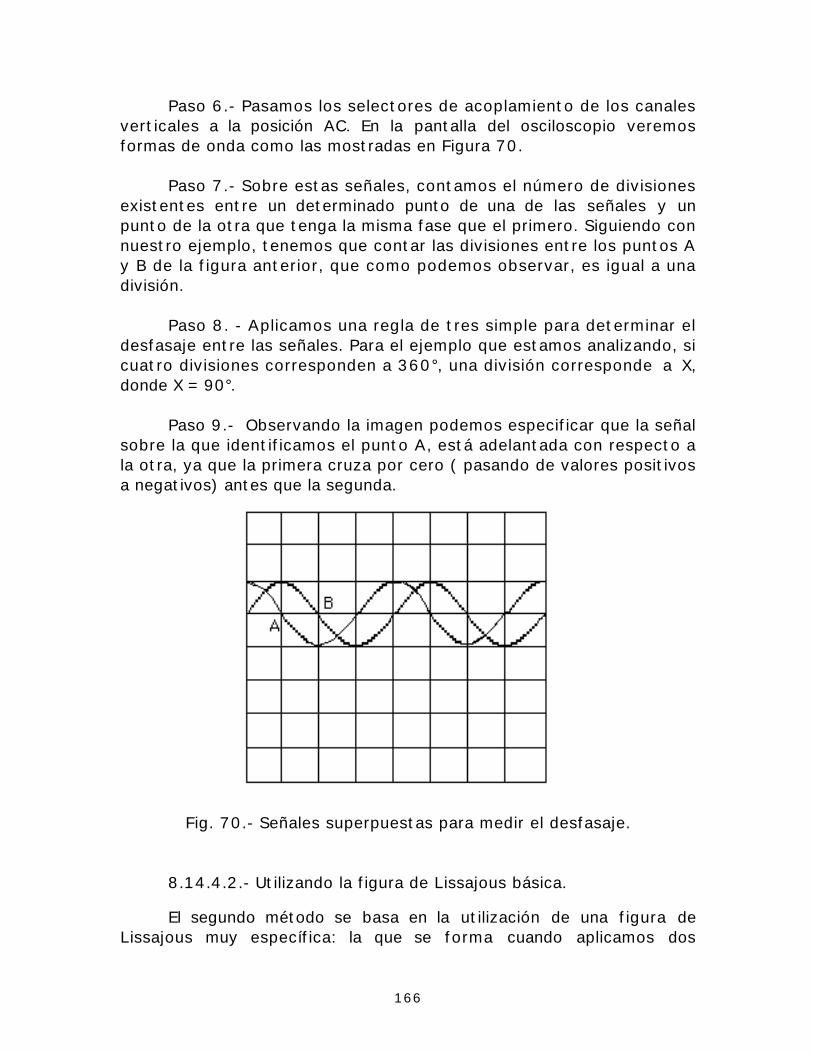
166
Paso 6.- Pasamos los selectores de acoplamiento de los canalesverticales a la posición AC. En la pantalla del osciloscopio veremosformas de onda como las mostradas en Figura 70.
Paso 7.- Sobre estas señales, contamos el número de divisionesexistentes entre un determinado punto de una de las señales y unpunto de la otra que tenga la misma fase que el primero. Siguiendo connuestro ejemplo, tenemos que contar las divisiones entre los puntos Ay B de la figura anterior, que como podemos observar, es igual a unadivisión.
Paso 8. - Aplicamos una regla de tres simple para determinar eldesfasaje entre las señales. Para el ejemplo que estamos analizando, sicuatro divisiones corresponden a 360°, una división corresponde a X,donde X = 90°.
Paso 9.- Observando la imagen podemos especificar que la señalsobre la que identificamos el punto A, está adelantada con respecto ala otra, ya que la primera cruza por cero ( pasando de valores positivosa negativos) antes que la segunda.
Fig. 70.- Señales superpuestas para medir el desfasaje.
8.14.4.2.- Utilizando la figura de Lissajous básica.
El segundo método se basa en la utilización de una figura deLissajous muy específica: la que se forma cuando aplicamos dos
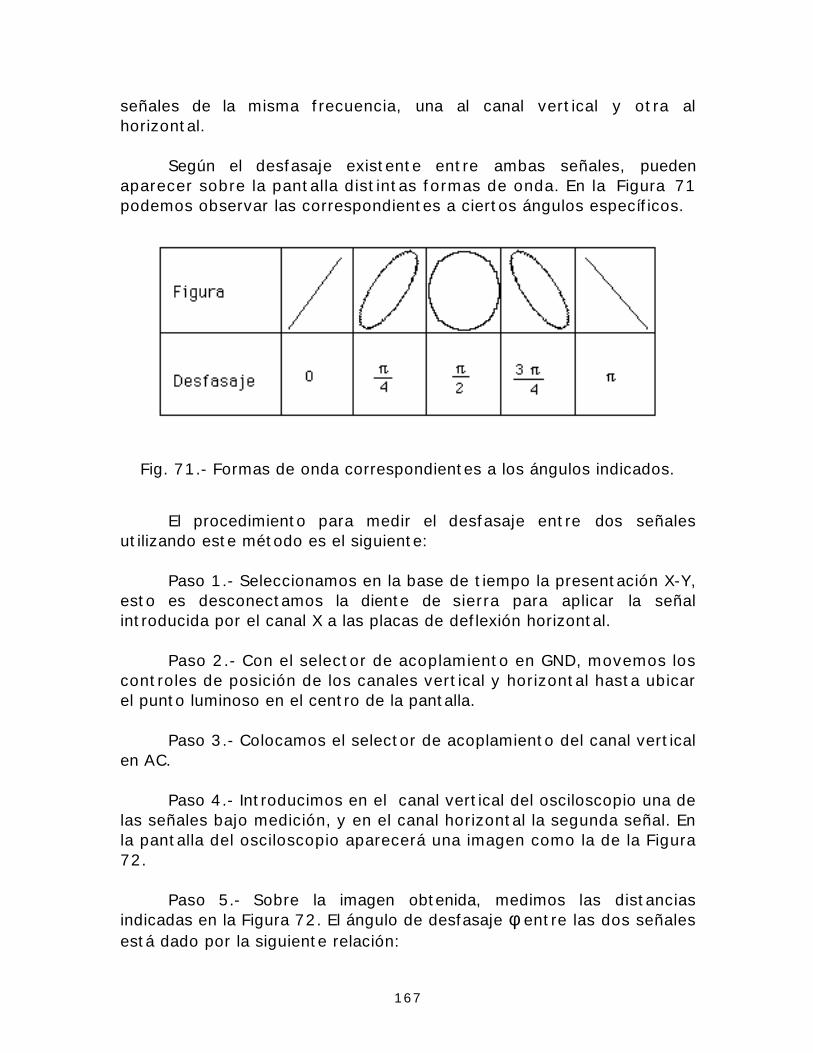
167
señales de la misma frecuencia, una al canal vertical y otra alhorizontal.
Según el desfasaje existente entre ambas señales, puedenaparecer sobre la pantalla distintas formas de onda. En la Figura 71podemos observar las correspondientes a ciertos ángulos específicos.
Fig. 71.- Formas de onda correspondientes a los ángulos indicados.
El procedimiento para medir el desfasaje entre dos señalesutilizando este método es el siguiente:
Paso 1.- Seleccionamos en la base de tiempo la presentación X-Y,esto es desconectamos la diente de sierra para aplicar la señalintroducida por el canal X a las placas de deflexión horizontal.
Paso 2.- Con el selector de acoplamiento en GND, movemos loscontroles de posición de los canales vertical y horizontal hasta ubicarel punto luminoso en el centro de la pantalla.
Paso 3.- Colocamos el selector de acoplamiento del canal verticalen AC.
Paso 4.- Introducimos en el canal vertical del osciloscopio una delas señales bajo medición, y en el canal horizontal la segunda señal. Enla pantalla del osciloscopio aparecerá una imagen como la de la Figura72.
Paso 5.- Sobre la imagen obtenida, medimos las distanciasindicadas en la Figura 72. El ángulo de desfasaje φ entre las dos señalesestá dado por la siguiente relación:
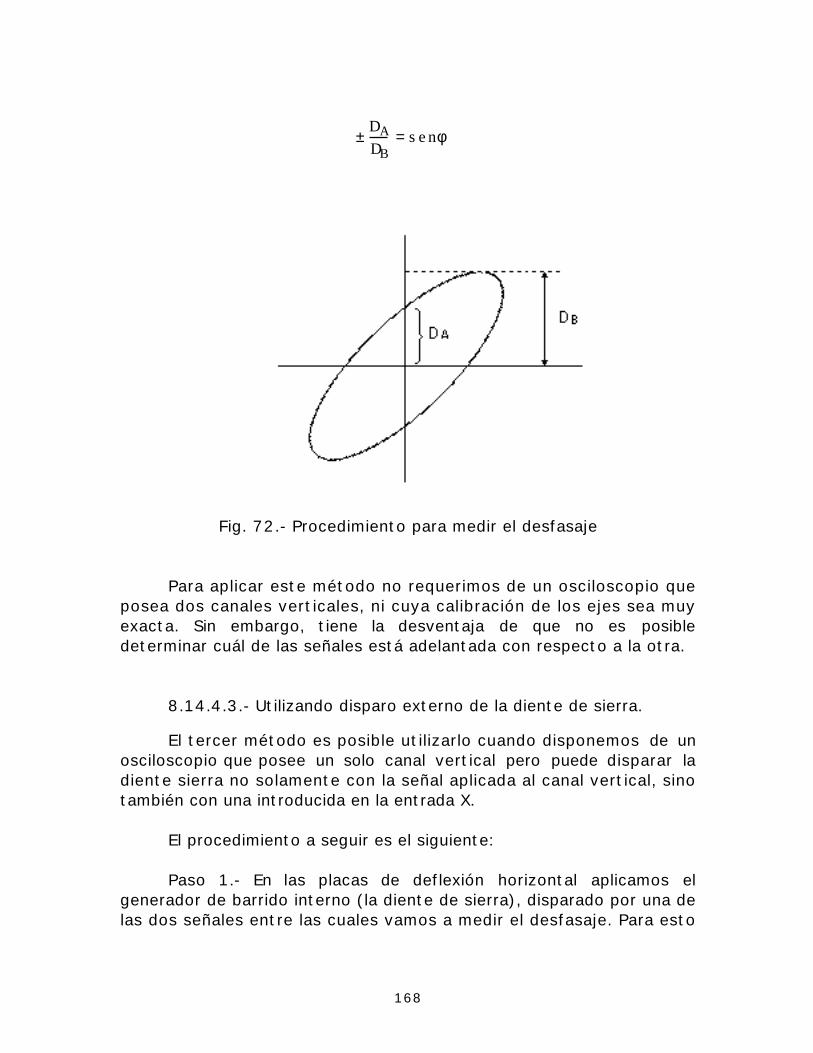
168
±DADB
= senφ
Fig. 72.- Procedimiento para medir el desfasaje
Para aplicar este método no requerimos de un osciloscopio queposea dos canales verticales, ni cuya calibración de los ejes sea muyexacta. Sin embargo, tiene la desventaja de que no es posibledeterminar cuál de las señales está adelantada con respecto a la otra.
8.14.4.3.- Utilizando disparo externo de la diente de sierra.
El tercer método es posible utilizarlo cuando disponemos de unosciloscopio que posee un solo canal vertical pero puede disparar ladiente sierra no solamente con la señal aplicada al canal vertical, sinotambién con una introducida en la entrada X.
El procedimiento a seguir es el siguiente:
Paso 1.- En las placas de deflexión horizontal aplicamos elgenerador de barrido interno (la diente de sierra), disparado por una delas dos señales entre las cuales vamos a medir el desfasaje. Para esto
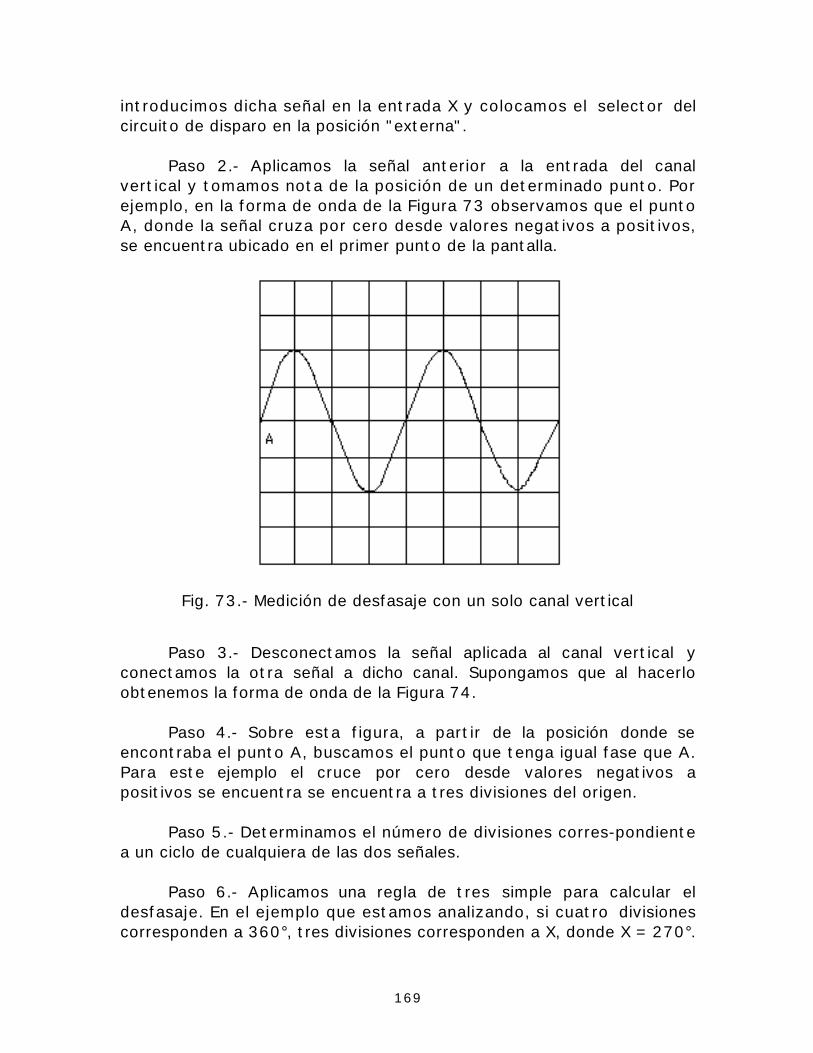
169
introducimos dicha señal en la entrada X y colocamos el selector delcircuito de disparo en la posición "externa".
Paso 2.- Aplicamos la señal anterior a la entrada del canalvertical y tomamos nota de la posición de un determinado punto. Porejemplo, en la forma de onda de la Figura 73 observamos que el puntoA, donde la señal cruza por cero desde valores negativos a positivos,se encuentra ubicado en el primer punto de la pantalla.
Fig. 73.- Medición de desfasaje con un solo canal vertical
Paso 3.- Desconectamos la señal aplicada al canal vertical yconectamos la otra señal a dicho canal. Supongamos que al hacerloobtenemos la forma de onda de la Figura 74.
Paso 4.- Sobre esta figura, a partir de la posición donde seencontraba el punto A, buscamos el punto que tenga igual fase que A.Para este ejemplo el cruce por cero desde valores negativos apositivos se encuentra se encuentra a tres divisiones del origen.
Paso 5.- Determinamos el número de divisiones corres-pondientea un ciclo de cualquiera de las dos señales.
Paso 6.- Aplicamos una regla de tres simple para calcular eldesfasaje. En el ejemplo que estamos analizando, si cuatro divisionescorresponden a 360°, tres divisiones corresponden a X, donde X = 270°.
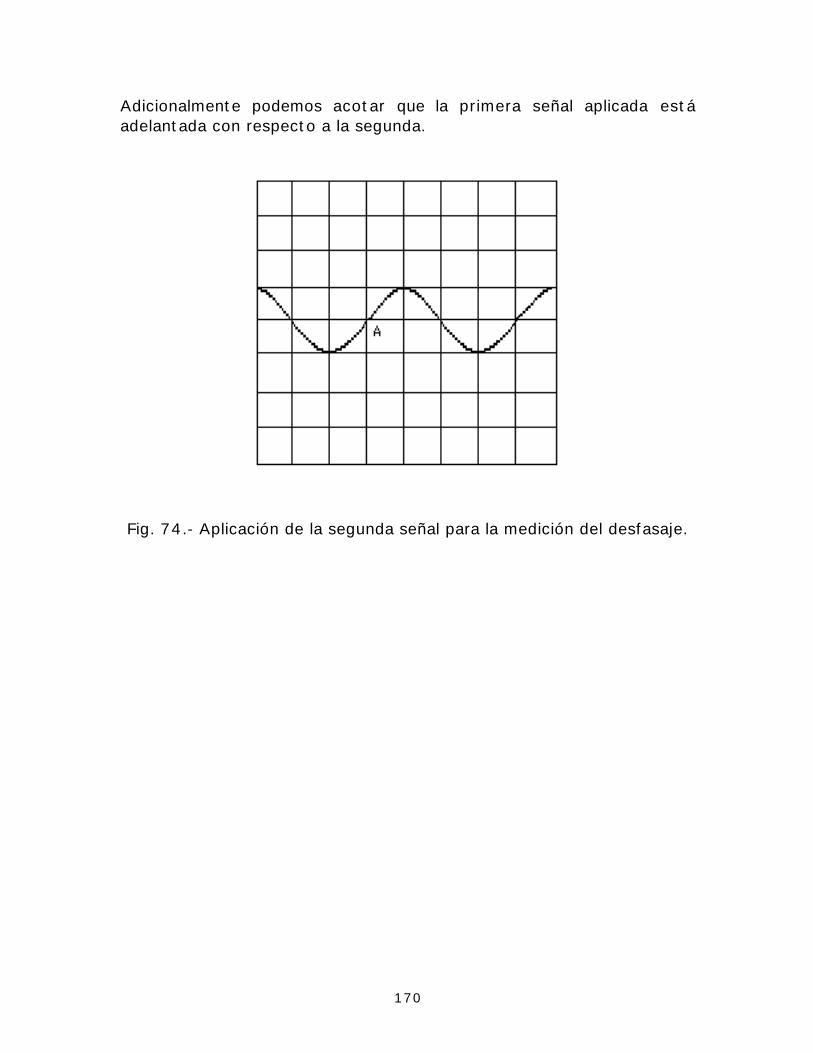
170
Adicionalmente podemos acotar que la primera señal aplicada estáadelantada con respecto a la segunda.
Fig. 74.- Aplicación de la segunda señal para la medición del desfasaje.
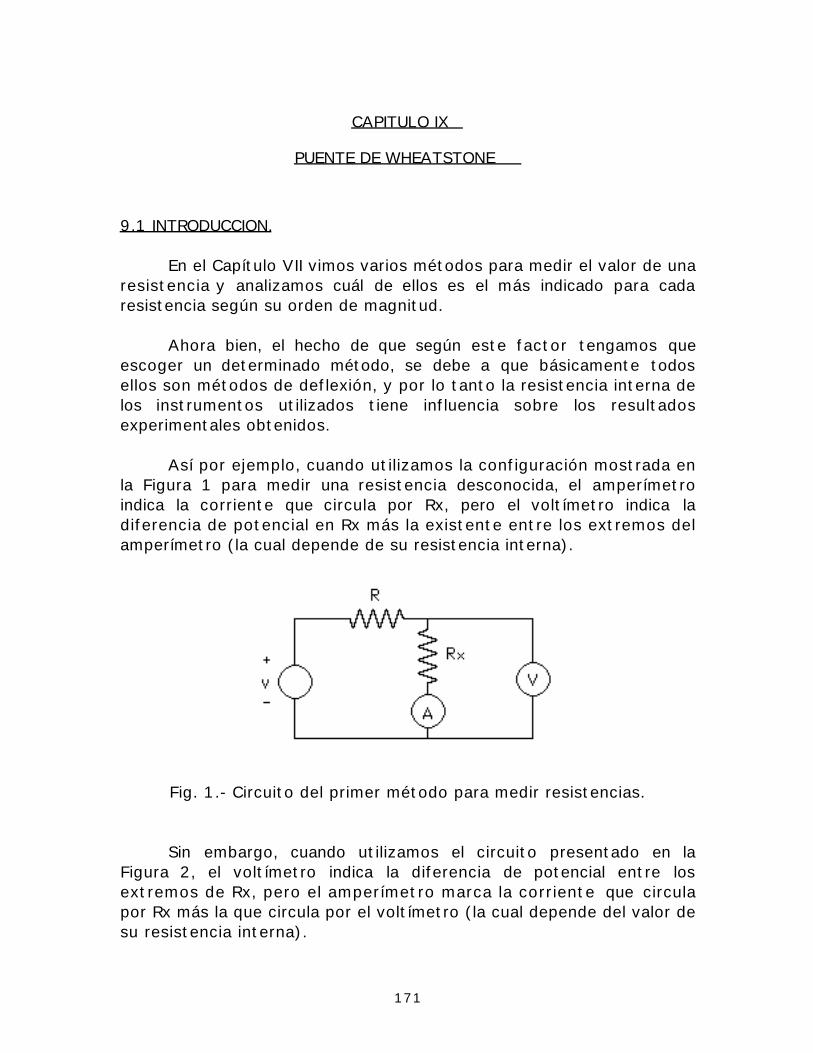
171
CAPITULO IX
PUENTE DE WHEATSTONE
9.1 INTRODUCCION.
En el Capítulo VII vimos varios métodos para medir el valor de unaresistencia y analizamos cuál de ellos es el más indicado para cadaresistencia según su orden de magnitud.
Ahora bien, el hecho de que según este factor tengamos queescoger un determinado método, se debe a que básicamente todosellos son métodos de deflexión, y por lo tanto la resistencia interna delos instrumentos utilizados tiene influencia sobre los resultadosexperimentales obtenidos.
Así por ejemplo, cuando utilizamos la configuración mostrada enla Figura 1 para medir una resistencia desconocida, el amperímetroindica la corriente que circula por Rx, pero el voltímetro indica ladiferencia de potencial en Rx más la existente entre los extremos delamperímetro (la cual depende de su resistencia interna).
Fig. 1.- Circuito del primer método para medir resistencias.
Sin embargo, cuando utilizamos el circuito presentado en laFigura 2, el voltímetro indica la diferencia de potencial entre losextremos de Rx, pero el amperímetro marca la corriente que circulapor Rx más la que circula por el voltímetro (la cual depende del valor desu resistencia interna).
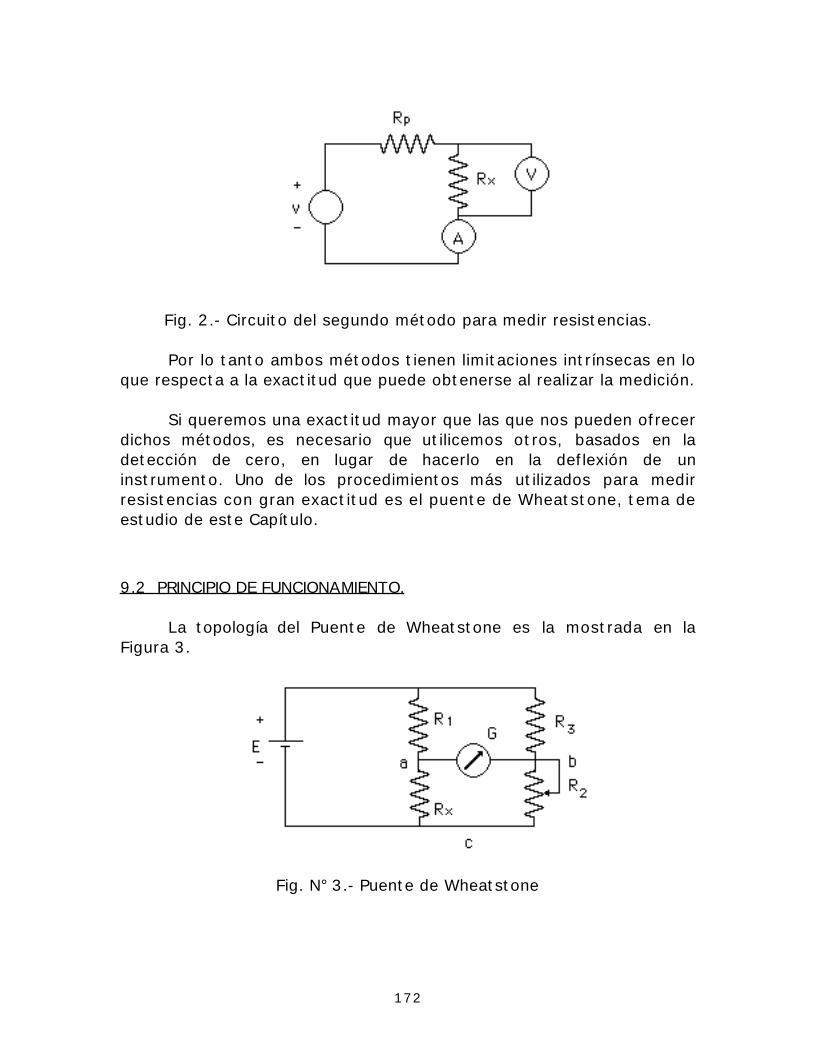
172
Fig. 2.- Circuito del segundo método para medir resistencias.
Por lo tanto ambos métodos tienen limitaciones intrínsecas en loque respecta a la exactitud que puede obtenerse al realizar la medición.
Si queremos una exactitud mayor que las que nos pueden ofrecerdichos métodos, es necesario que utilicemos otros, basados en ladetección de cero, en lugar de hacerlo en la deflexión de uninstrumento. Uno de los procedimientos más utilizados para medirresistencias con gran exactitud es el puente de Wheatstone, tema deestudio de este Capítulo.
9.2 PRINCIPIO DE FUNCIONAMIENTO.
La topología del Puente de Wheatstone es la mostrada en laFigura 3.
Fig. N° 3.- Puente de Wheatstone
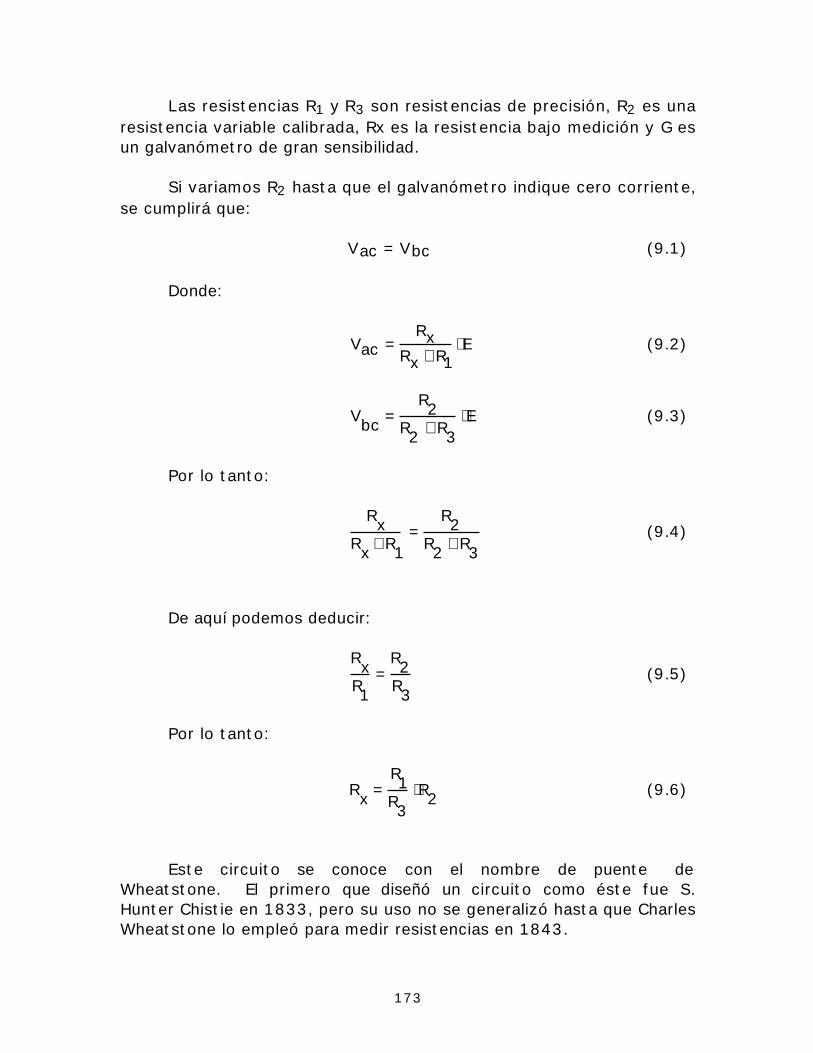
173
Las resistencias R1 y R3 son resistencias de precisión, R2 es unaresistencia variable calibrada, Rx es la resistencia bajo medición y G esun galvanómetro de gran sensibilidad.
Si variamos R2 hasta que el galvanómetro indique cero corriente,se cumplirá que:
Vac = Vbc (9.1)
Donde:
Vac =
RxRx + R1
⋅ E (9.2)
Vbc =
R2R2 + R3
⋅E (9.3)
Por lo tanto:
RxRx + R1
=R2
R2 + R3(9.4)
De aquí podemos deducir:
RxR1
=R2R3
(9.5)
Por lo tanto:
Rx =
R1R3
⋅R2 (9.6)
Este circuito se conoce con el nombre de puente deWheatstone. El primero que diseñó un circuito como éste fue S.Hunter Chistie en 1833, pero su uso no se generalizó hasta que CharlesWheatstone lo empleó para medir resistencias en 1843.
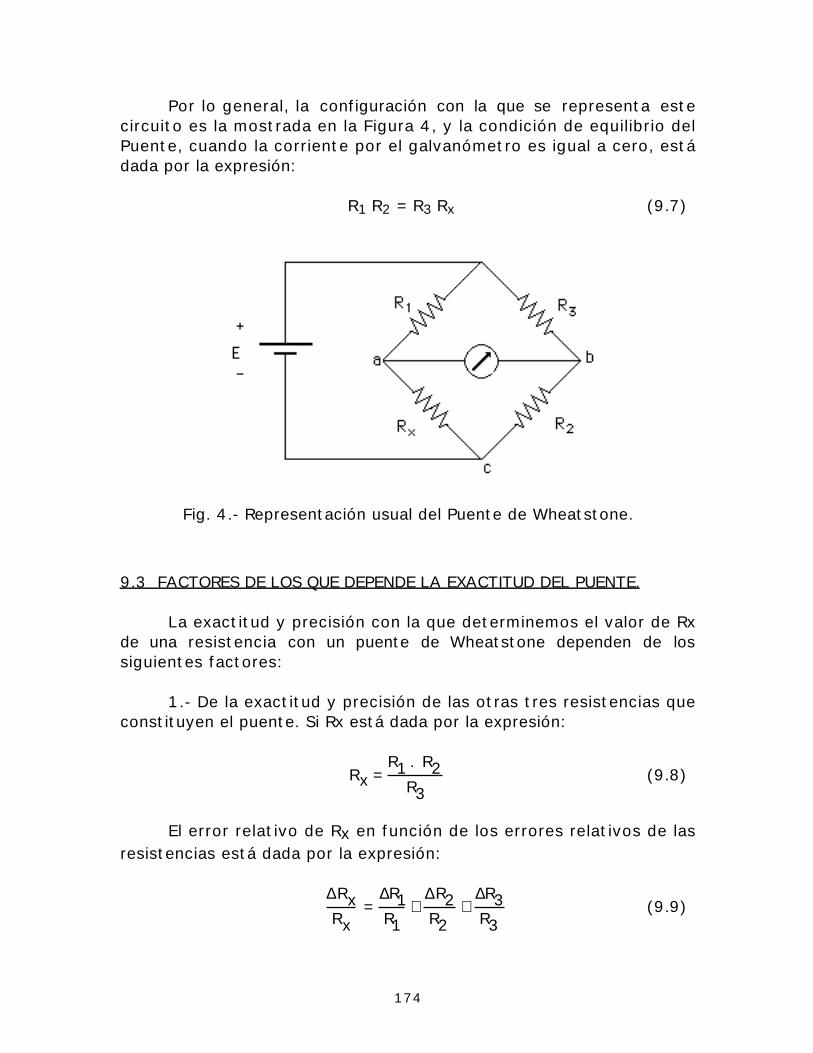
174
Por lo general, la configuración con la que se representa estecircuito es la mostrada en la Figura 4, y la condición de equilibrio delPuente, cuando la corriente por el galvanómetro es igual a cero, estádada por la expresión:
R1 R2 = R3 Rx (9.7)
Fig. 4.- Representación usual del Puente de Wheatstone.
9.3 FACTORES DE LOS QUE DEPENDE LA EXACTITUD DEL PUENTE.
La exactitud y precisión con la que determinemos el valor de Rxde una resistencia con un puente de Wheatstone dependen de lossiguientes factores:
1.- De la exactitud y precisión de las otras tres resistencias queconstituyen el puente. Si Rx está dada por la expresión:
Rx =
R1 . R2R3
(9.8)
El error relativo de Rx en función de los errores relativos de lasresistencias está dada por la expresión:
∆RxRx
=∆R1R1
+∆R2R2
+∆R3R3
(9.9)
175
2.- De los valores de las resistencias de precisión R1 y R3.Cuanto menores sean los valores nominales de dichas resistencias,mayores serán las corrientes en el circuito, y será más simpledetectar variaciones de las mismas.
3.- Del valor de la fuente E. Cuanto mayor sea dicho valor,mayores serán las corrientes en el circuito, por lo que será más simpledetectar variaciones en sus valores. Debido a las condicionesimpuestas sobre la batería y las resistencias, se tienen que realizar losdiseños tomando en cuenta las limitaciones de potencia de estasúltimas.
4.- De la sensibilidad del galvanómetro. Cuanto mayor sea dichasensibilidad se podrá apreciar mejor la corriente ig, y por lo tanto sepodrán ajustar las resistencias con más precisión para que la corrientesea cero.
9.4 SENSIBILIDAD DEL PUENTE DE WHEATSTONE.
La sensibilidad del puente de Wheatstone se define como elnúmero de divisiones que deflecta el galvanómetro cuando se produceuna variación en la resistencia incógnita (Rx) o en la resistencia deajuste (R2).
La sensibilidad del puente viene dada por:
Sp =
Nº de divisiones∆Rx
(9.10)
Para hallar experimentalmente la sensibilidad del puente seproduce una variación de Rx, se observa el número de divisiones quedeflecta el galvanómetro y se calcula Sp aplicando la fórmula anterior.
9.5 DISEÑO DE UN PUENTE DE WHEATSTONE.
Por lo general, cuando se va a diseñar un puente de Wheatstonese especifica para qué rango o rangos de resistencias se quiereutilizar. Por ejemplo, supongamos que queremos diseñar un puente de
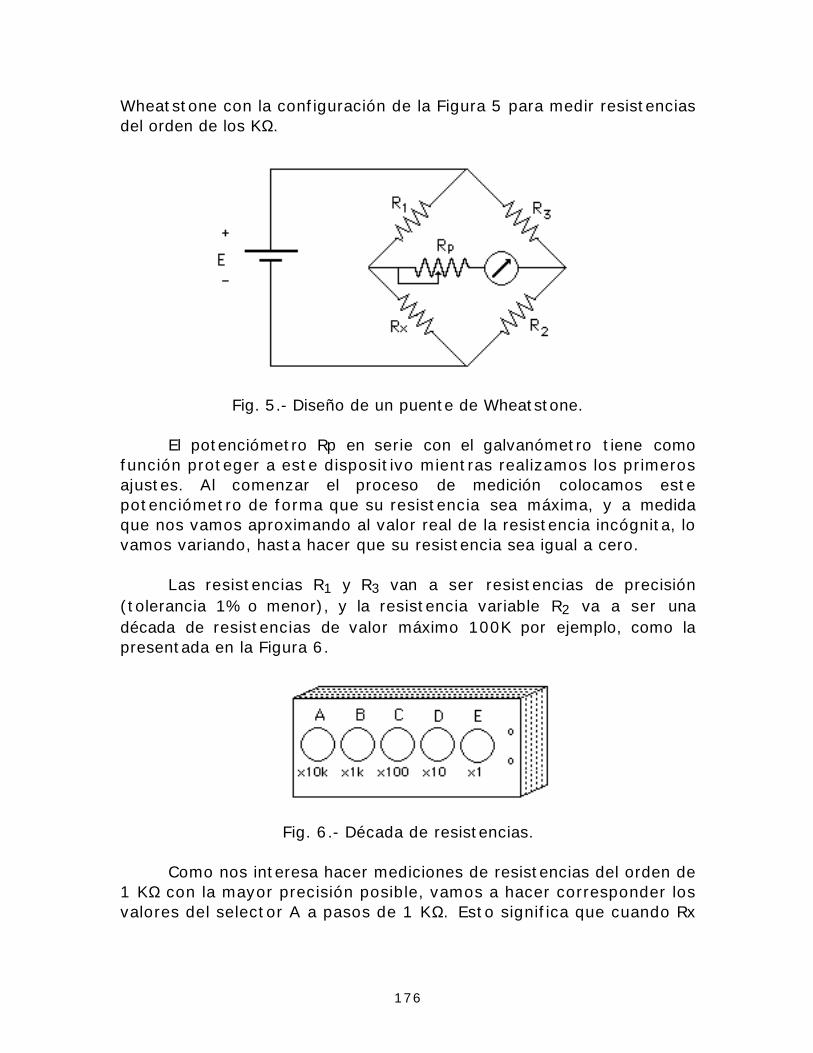
176
Wheatstone con la configuración de la Figura 5 para medir resistenciasdel orden de los KΩ.
Fig. 5.- Diseño de un puente de Wheatstone.
El potenciómetro Rp en serie con el galvanómetro tiene comofunción proteger a este dispositivo mientras realizamos los primerosajustes. Al comenzar el proceso de medición colocamos estepotenciómetro de forma que su resistencia sea máxima, y a medidaque nos vamos aproximando al valor real de la resistencia incógnita, lovamos variando, hasta hacer que su resistencia sea igual a cero.
Las resistencias R1 y R3 van a ser resistencias de precisión(tolerancia 1% o menor), y la resistencia variable R2 va a ser unadécada de resistencias de valor máximo 100K por ejemplo, como lapresentada en la Figura 6.
Fig. 6.- Década de resistencias.
Como nos interesa hacer mediciones de resistencias del orden de1 KΩ con la mayor precisión posible, vamos a hacer corresponder losvalores del selector A a pasos de 1 KΩ. Esto significa que cuando Rx
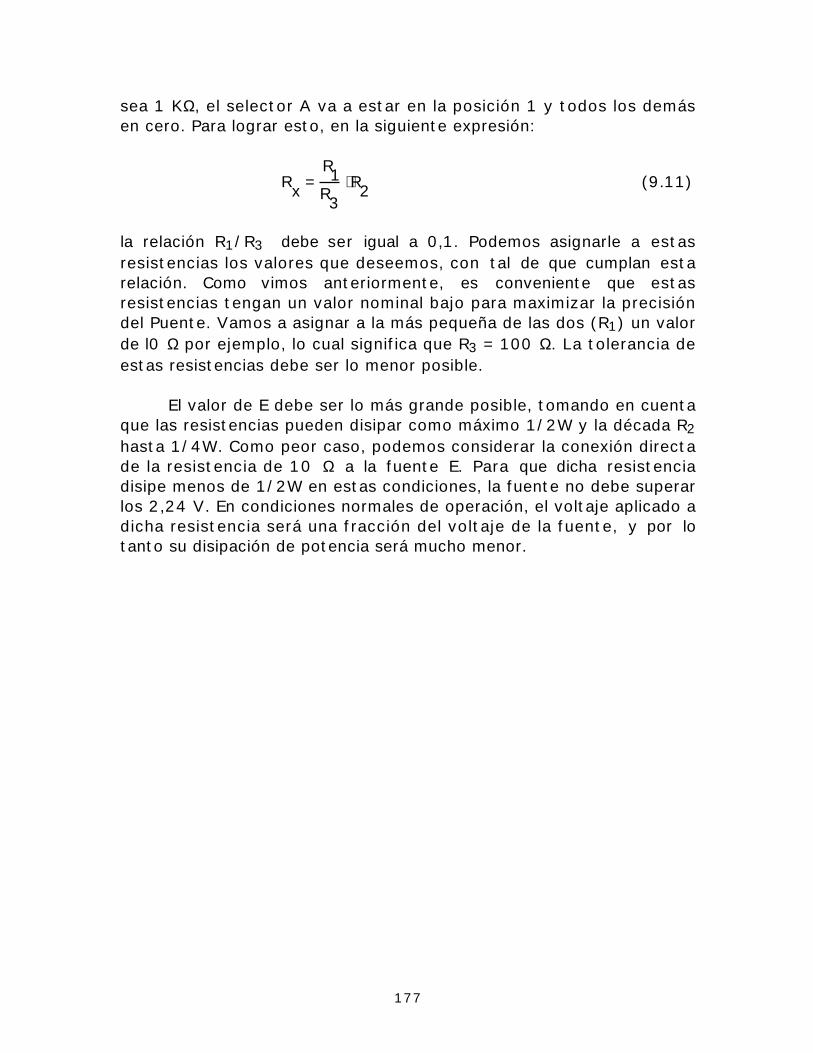
177
sea 1 KΩ, el selector A va a estar en la posición 1 y todos los demásen cero. Para lograr esto, en la siguiente expresión:
Rx =
R1R3
⋅R2 (9.11)
la relación R1/R3 debe ser igual a 0,1. Podemos asignarle a estasresistencias los valores que deseemos, con tal de que cumplan estarelación. Como vimos anteriormente, es conveniente que estasresistencias tengan un valor nominal bajo para maximizar la precisióndel Puente. Vamos a asignar a la más pequeña de las dos (R1) un valorde l0 Ω por ejemplo, lo cual significa que R3 = 100 Ω. La tolerancia deestas resistencias debe ser lo menor posible.
El valor de E debe ser lo más grande posible, tomando en cuentaque las resistencias pueden disipar como máximo 1/2W y la década R2hasta 1/4W. Como peor caso, podemos considerar la conexión directade la resistencia de 10 Ω a la fuente E. Para que dicha resistenciadisipe menos de 1/2W en estas condiciones, la fuente no debe superarlos 2,24 V. En condiciones normales de operación, el voltaje aplicado adicha resistencia será una fracción del voltaje de la fuente, y por lotanto su disipación de potencia será mucho menor.
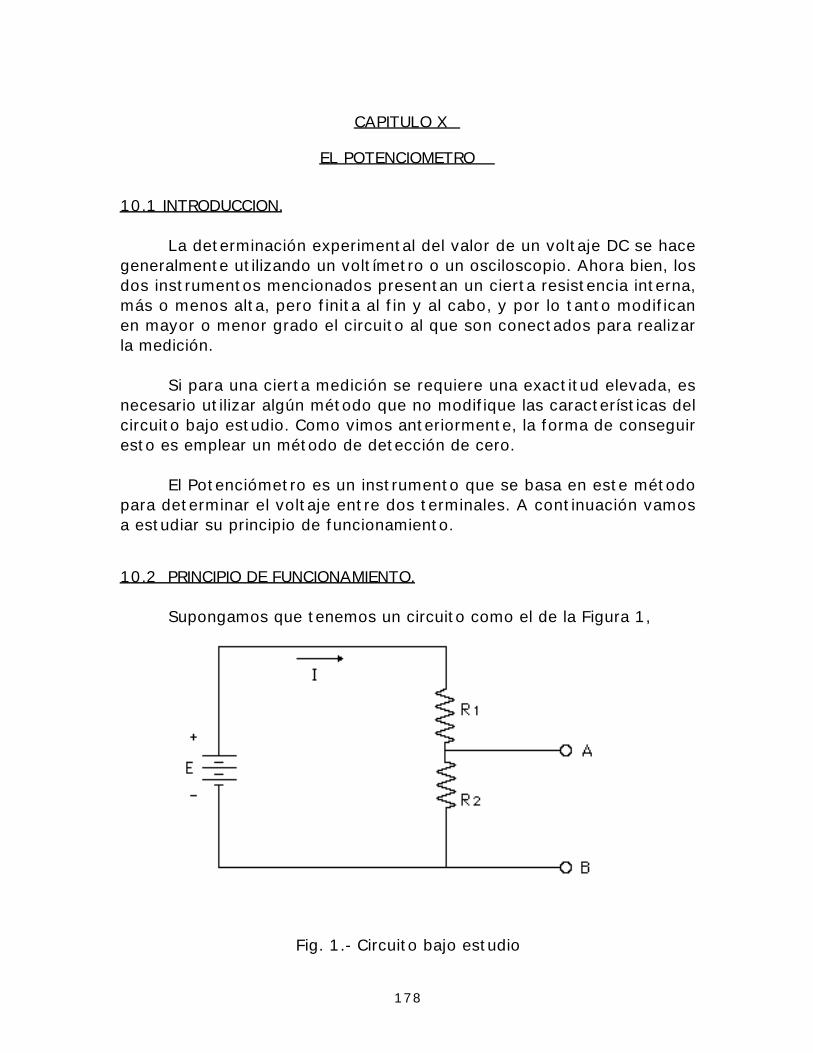
178
CAPITULO X
EL POTENCIOMETRO
10.1 INTRODUCCION.
La determinación experimental del valor de un voltaje DC se hacegeneralmente utilizando un voltímetro o un osciloscopio. Ahora bien, losdos instrumentos mencionados presentan un cierta resistencia interna,más o menos alta, pero finita al fin y al cabo, y por lo tanto modificanen mayor o menor grado el circuito al que son conectados para realizarla medición.
Si para una cierta medición se requiere una exactitud elevada, esnecesario utilizar algún método que no modifique las características delcircuito bajo estudio. Como vimos anteriormente, la forma de conseguiresto es emplear un método de detección de cero.
El Potenciómetro es un instrumento que se basa en este métodopara determinar el voltaje entre dos terminales. A continuación vamosa estudiar su principio de funcionamiento.
10.2 PRINCIPIO DE FUNCIONAMIENTO.
Supongamos que tenemos un circuito como el de la Figura 1,
Fig. 1.- Circuito bajo estudio
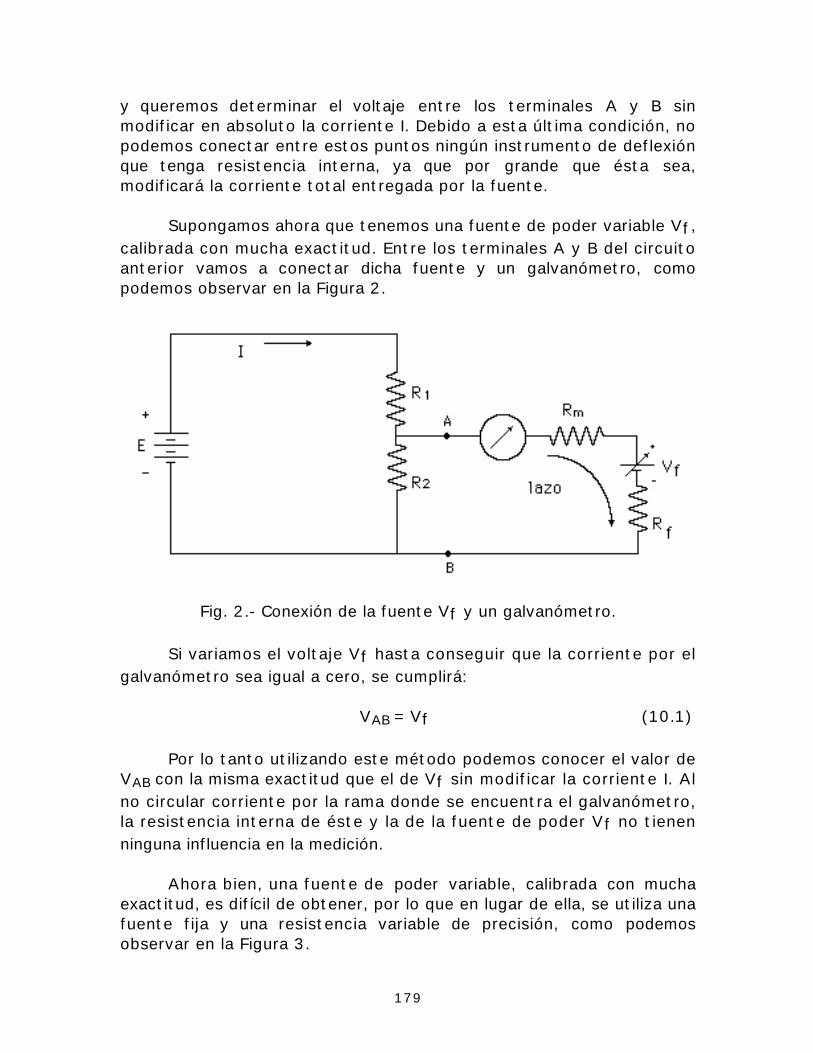
179
y queremos determinar el voltaje entre los terminales A y B sinmodificar en absoluto la corriente I. Debido a esta última condición, nopodemos conectar entre estos puntos ningún instrumento de deflexiónque tenga resistencia interna, ya que por grande que ésta sea,modificará la corriente total entregada por la fuente.
Supongamos ahora que tenemos una fuente de poder variable Vf,calibrada con mucha exactitud. Entre los terminales A y B del circuitoanterior vamos a conectar dicha fuente y un galvanómetro, comopodemos observar en la Figura 2.
Fig. 2.- Conexión de la fuente Vf y un galvanómetro.
Si variamos el voltaje Vf hasta conseguir que la corriente por elgalvanómetro sea igual a cero, se cumplirá:
VAB = Vf (10.1)
Por lo tanto utilizando este método podemos conocer el valor deVAB con la misma exactitud que el de Vf sin modificar la corriente I. Alno circular corriente por la rama donde se encuentra el galvanómetro,la resistencia interna de éste y la de la fuente de poder Vf no tienenninguna influencia en la medición.
Ahora bien, una fuente de poder variable, calibrada con muchaexactitud, es difícil de obtener, por lo que en lugar de ella, se utiliza unafuente fija y una resistencia variable de precisión, como podemosobservar en la Figura 3.
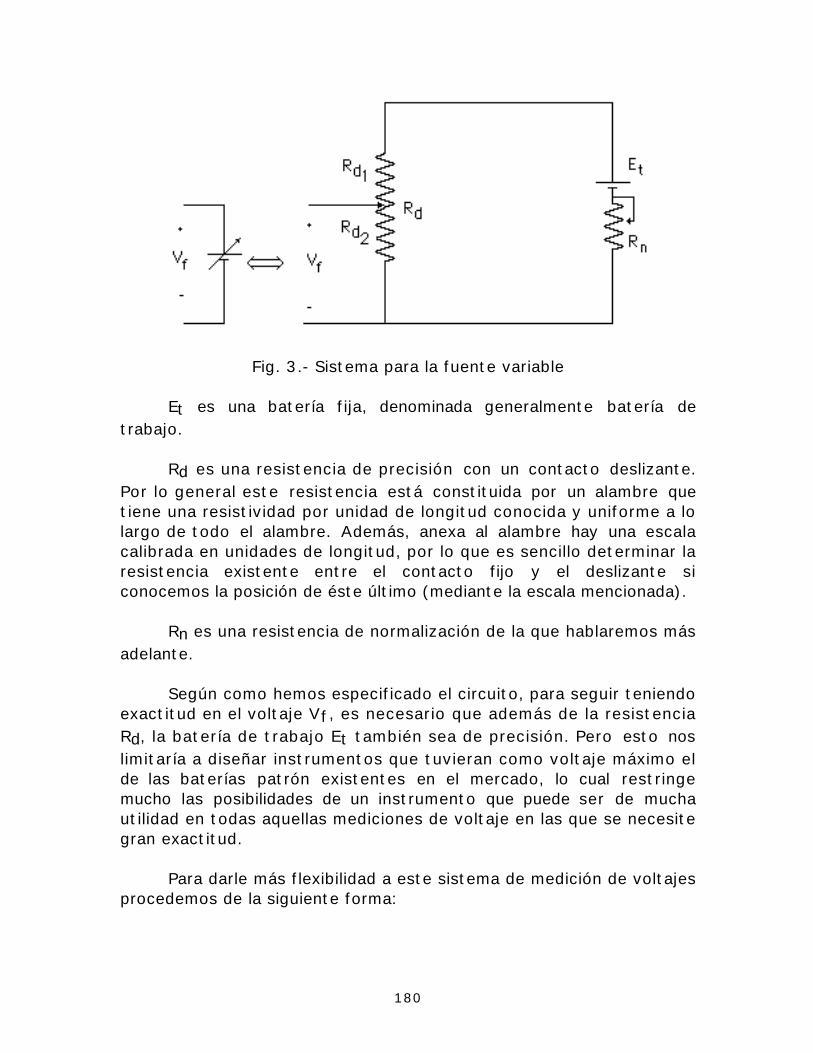
180
Fig. 3.- Sistema para la fuente variable
Et es una batería fija, denominada generalmente batería detrabajo.
Rd es una resistencia de precisión con un contacto deslizante.Por lo general este resistencia está constituida por un alambre quetiene una resistividad por unidad de longitud conocida y uniforme a lolargo de todo el alambre. Además, anexa al alambre hay una escalacalibrada en unidades de longitud, por lo que es sencillo determinar laresistencia existente entre el contacto fijo y el deslizante siconocemos la posición de éste último (mediante la escala mencionada).
Rn es una resistencia de normalización de la que hablaremos másadelante.
Según como hemos especificado el circuito, para seguir teniendoexactitud en el voltaje Vf, es necesario que además de la resistenciaRd, la batería de trabajo Et también sea de precisión. Pero esto noslimitaría a diseñar instrumentos que tuvieran como voltaje máximo elde las baterías patrón existentes en el mercado, lo cual restringemucho las posibilidades de un instrumento que puede ser de muchautilidad en todas aquellas mediciones de voltaje en las que se necesitegran exactitud.
Para darle más flexibilidad a este sistema de medición de voltajesprocedemos de la siguiente forma:
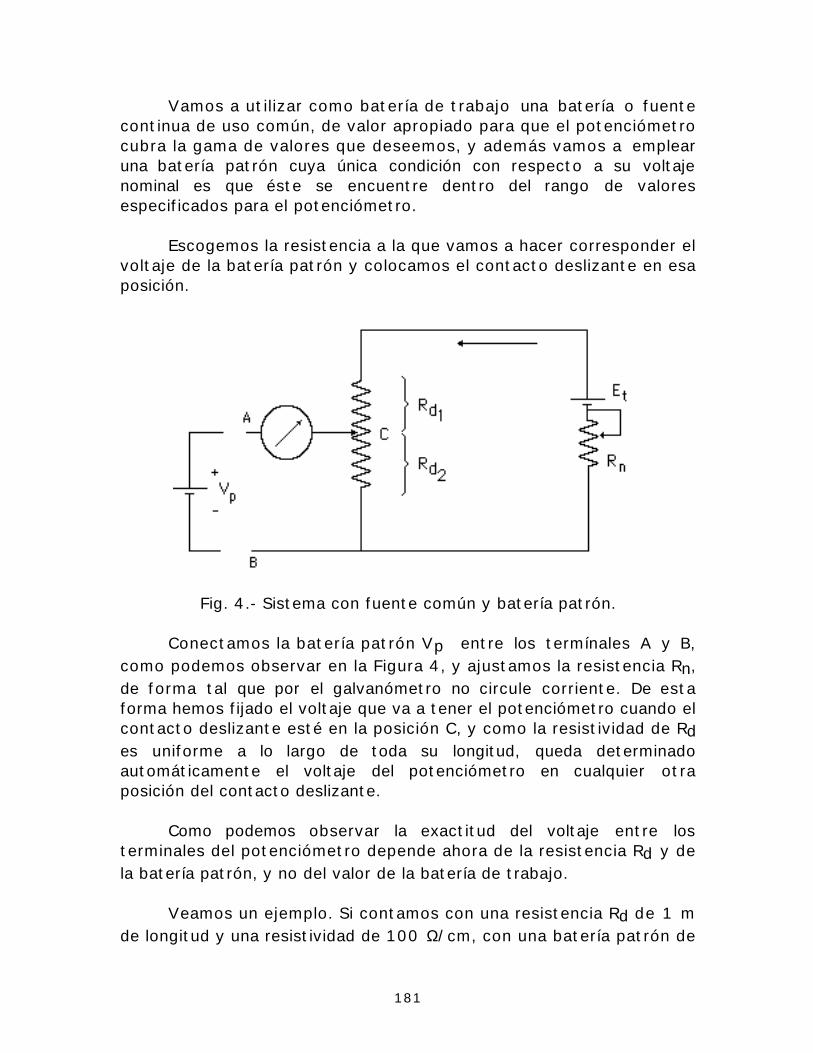
181
Vamos a utilizar como batería de trabajo una batería o fuentecontinua de uso común, de valor apropiado para que el potenciómetrocubra la gama de valores que deseemos, y además vamos a emplearuna batería patrón cuya única condición con respecto a su voltajenominal es que éste se encuentre dentro del rango de valoresespecificados para el potenciómetro.
Escogemos la resistencia a la que vamos a hacer corresponder elvoltaje de la batería patrón y colocamos el contacto deslizante en esaposición.
Fig. 4.- Sistema con fuente común y batería patrón.
Conectamos la batería patrón Vp entre los termínales A y B,como podemos observar en la Figura 4, y ajustamos la resistencia Rn,de forma tal que por el galvanómetro no circule corriente. De estaforma hemos fijado el voltaje que va a tener el potenciómetro cuando elcontacto deslizante esté en la posición C, y como la resistividad de Rdes uniforme a lo largo de toda su longitud, queda determinadoautomáticamente el voltaje del potenciómetro en cualquier otraposición del contacto deslizante.
Como podemos observar la exactitud del voltaje entre losterminales del potenciómetro depende ahora de la resistencia Rd y dela batería patrón, y no del valor de la batería de trabajo.
Veamos un ejemplo. Si contamos con una resistencia Rd de 1 mde longitud y una resistividad de 100 Ω/cm, con una batería patrón de
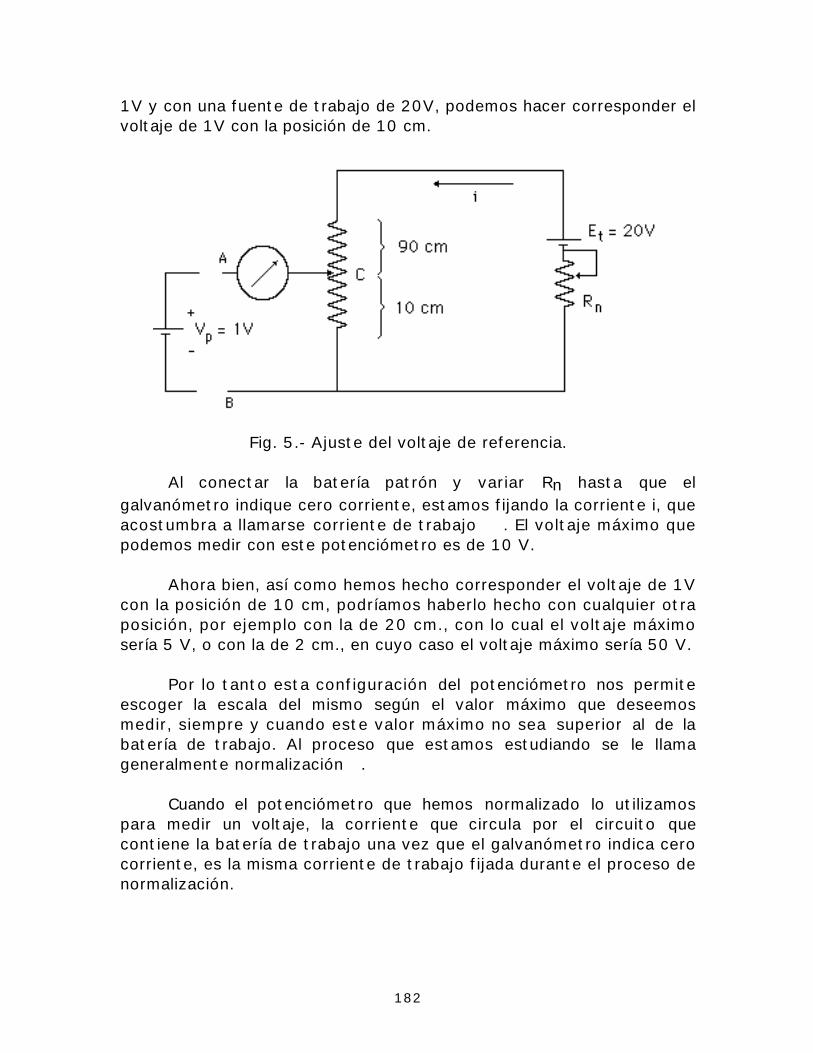
182
1V y con una fuente de trabajo de 20V, podemos hacer corresponder elvoltaje de 1V con la posición de 10 cm.
Fig. 5.- Ajuste del voltaje de referencia.
Al conectar la batería patrón y variar Rn hasta que elgalvanómetro indique cero corriente, estamos fijando la corriente i, queacostumbra a llamarse corriente de trabajo . El voltaje máximo quepodemos medir con este potenciómetro es de 10 V.
Ahora bien, así como hemos hecho corresponder el voltaje de 1Vcon la posición de 10 cm, podríamos haberlo hecho con cualquier otraposición, por ejemplo con la de 20 cm., con lo cual el voltaje máximosería 5 V, o con la de 2 cm., en cuyo caso el voltaje máximo sería 50 V.
Por lo tanto esta configuración del potenciómetro nos permiteescoger la escala del mismo según el valor máximo que deseemosmedir, siempre y cuando este valor máximo no sea superior al de labatería de trabajo. Al proceso que estamos estudiando se le llamageneralmente normalización .
Cuando el potenciómetro que hemos normalizado lo utilizamospara medir un voltaje, la corriente que circula por el circuito quecontiene la batería de trabajo una vez que el galvanómetro indica cerocorriente, es la misma corriente de trabajo fijada durante el proceso denormalización.
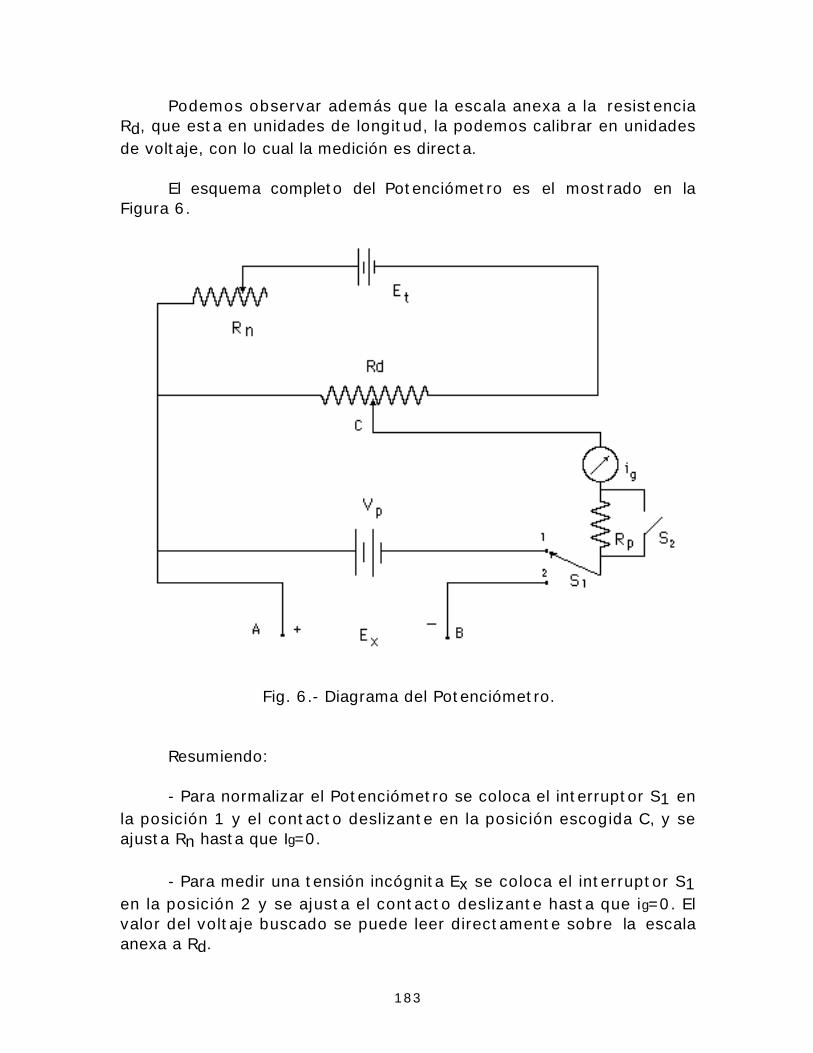
183
Podemos observar además que la escala anexa a la resistenciaRd, que esta en unidades de longitud, la podemos calibrar en unidadesde voltaje, con lo cual la medición es directa.
El esquema completo del Potenciómetro es el mostrado en laFigura 6.
Fig. 6.- Diagrama del Potenciómetro.
Resumiendo:
- Para normalizar el Potenciómetro se coloca el interruptor S1 enla posición 1 y el contacto deslizante en la posición escogida C, y seajusta Rn hasta que Ig=0.
- Para medir una tensión incógnita Ex se coloca el interruptor S1en la posición 2 y se ajusta el contacto deslizante hasta que ig=0. Elvalor del voltaje buscado se puede leer directamente sobre la escalaanexa a Rd.
184
Cuando se miden varios voltajes con el potenciómetro, esconveniente normalizarlo antes de realizar cada medición.
El interruptor S2, que cuando está cerrado cortocircuita laresistencia Rp, tiene la siguiente función:
Por lo general el galvanómetro que se utiliza en lospotenciómetros es muy sensible, por lo que al comenzar a hacer losajustes de resistencia para obtener ig=0 (bien sea durante el procesode normalización o el de medición), es conveniente limitar el valor de igcon una resistencia de protección Rp, para que una corriente excesivano dañe dicho galvanómetro.
Una vez que se está cerca del valor de resistencia para el cual secumple la condición de equilibrio, se puede cortocircuitar Rp cerrando elinterruptor S2, con lo cual se lleva la sensibilidad del galvanómetro a sumáximo, y se pueden realizar los ajustes finales de resistencia conmucha más precisión.
10.3 ERRORES DE MEDICION.
La exactitud de las mediciones realizadas con el potenciómetrodepende de:
- La uniformidad de la resistividad por unidad de longitud de Rd alo largo de todo el alambre.
- La exactitud de la pila patrón.
- La sensibilidad del galvanómetro. Cuanto más sensible sea esteinstrumento, será capaz de detectar mejor pequeñas variaciones decorriente, y por lo tanto permitirá un mejor ajuste de las resistencias.
- La estabilidad de la batería de trabajo. Como dijimosanteriormente, la exactitud de la medición no depende del valor dedicha batería, pero sin embargo depende de que dicho valor permanezcaconstante durante el proceso de normalización y de medición.
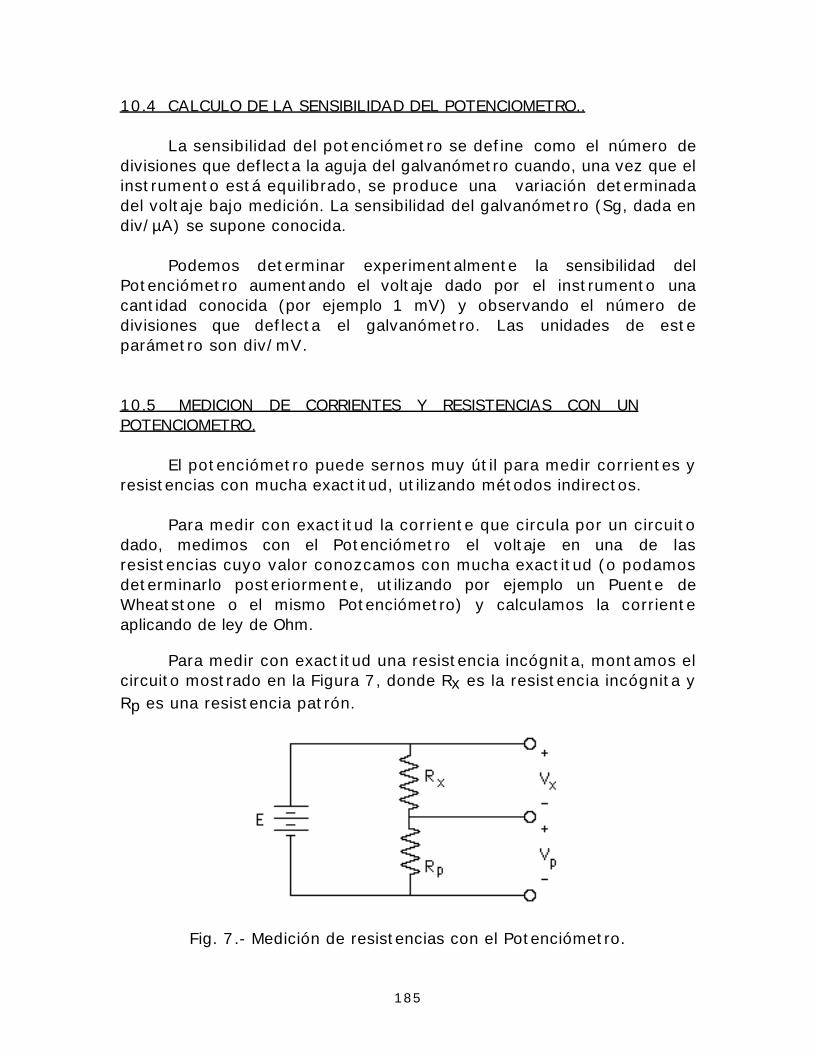
185
10.4 CALCULO DE LA SENSIBILIDAD DEL POTENCIOMETRO..
La sensibilidad del potenciómetro se define como el número dedivisiones que deflecta la aguja del galvanómetro cuando, una vez que elinstrumento está equilibrado, se produce una variación determinadadel voltaje bajo medición. La sensibilidad del galvanómetro (Sg, dada endiv/µA) se supone conocida.
Podemos determinar experimentalmente la sensibilidad delPotenciómetro aumentando el voltaje dado por el instrumento unacantidad conocida (por ejemplo 1 mV) y observando el número dedivisiones que deflecta el galvanómetro. Las unidades de esteparámetro son div/mV.
10.5 MEDICION DE CORRIENTES Y RESISTENCIAS CON UNPOTENCIOMETRO.
El potenciómetro puede sernos muy útil para medir corrientes yresistencias con mucha exactitud, utilizando métodos indirectos.
Para medir con exactitud la corriente que circula por un circuitodado, medimos con el Potenciómetro el voltaje en una de lasresistencias cuyo valor conozcamos con mucha exactitud (o podamosdeterminarlo posteriormente, utilizando por ejemplo un Puente deWheatstone o el mismo Potenciómetro) y calculamos la corrienteaplicando de ley de Ohm.
Para medir con exactitud una resistencia incógnita, montamos elcircuito mostrado en la Figura 7, donde Rx es la resistencia incógnita yRp es una resistencia patrón.
Fig. 7.- Medición de resistencias con el Potenciómetro.
186
A continuación medimos el voltaje sobre cada una de lasresistencias utilizando el Potenciómetro, y calculamos el valor de Rxaplicando la relación:
Rx =
VxVp
⋅ Rp (10.2)
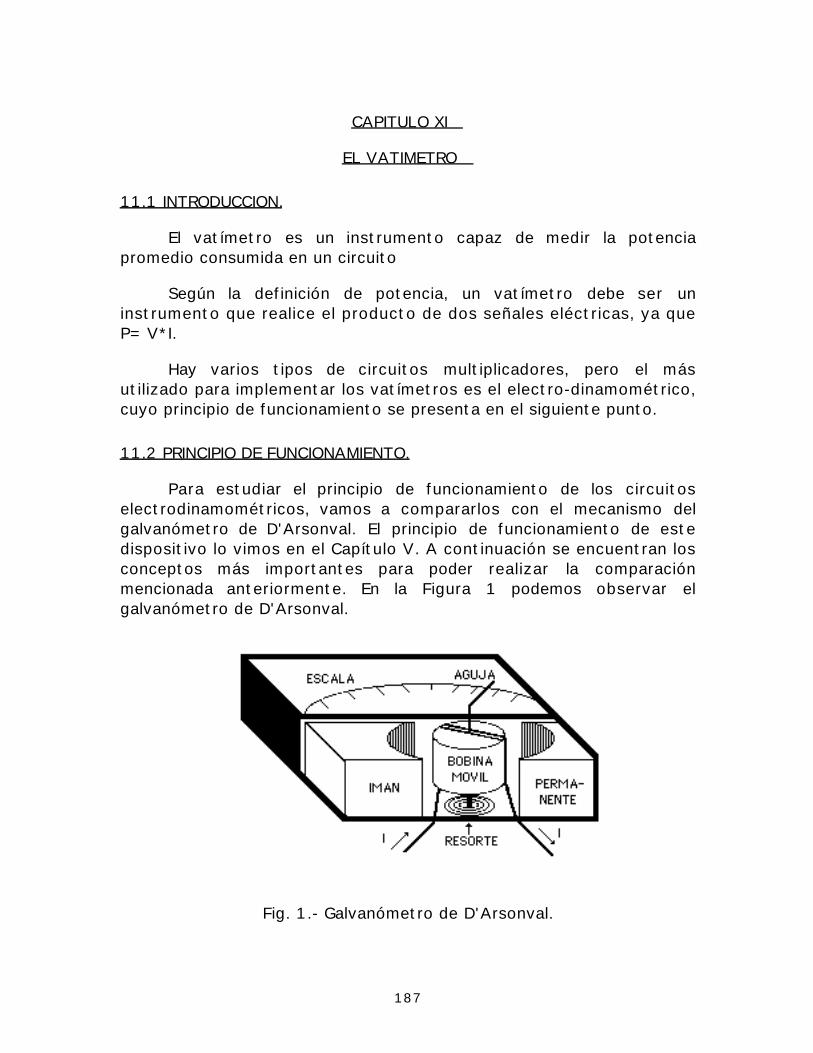
187
CAPITULO XI
EL VATIMETRO
11.1 INTRODUCCION.
El vatímetro es un instrumento capaz de medir la potenciapromedio consumida en un circuito
Según la definición de potencia, un vatímetro debe ser uninstrumento que realice el producto de dos señales eléctricas, ya queP= V*I.
Hay varios tipos de circuitos multiplicadores, pero el másutilizado para implementar los vatímetros es el electro-dinamométrico,cuyo principio de funcionamiento se presenta en el siguiente punto.
11.2 PRINCIPIO DE FUNCIONAMIENTO.
Para estudiar el principio de funcionamiento de los circuitoselectrodinamométricos, vamos a compararlos con el mecanismo delgalvanómetro de D'Arsonval. El principio de funcionamiento de estedispositivo lo vimos en el Capítulo V. A continuación se encuentran losconceptos más importantes para poder realizar la comparaciónmencionada anteriormente. En la Figura 1 podemos observar elgalvanómetro de D'Arsonval.
Fig. 1.- Galvanómetro de D'Arsonval.
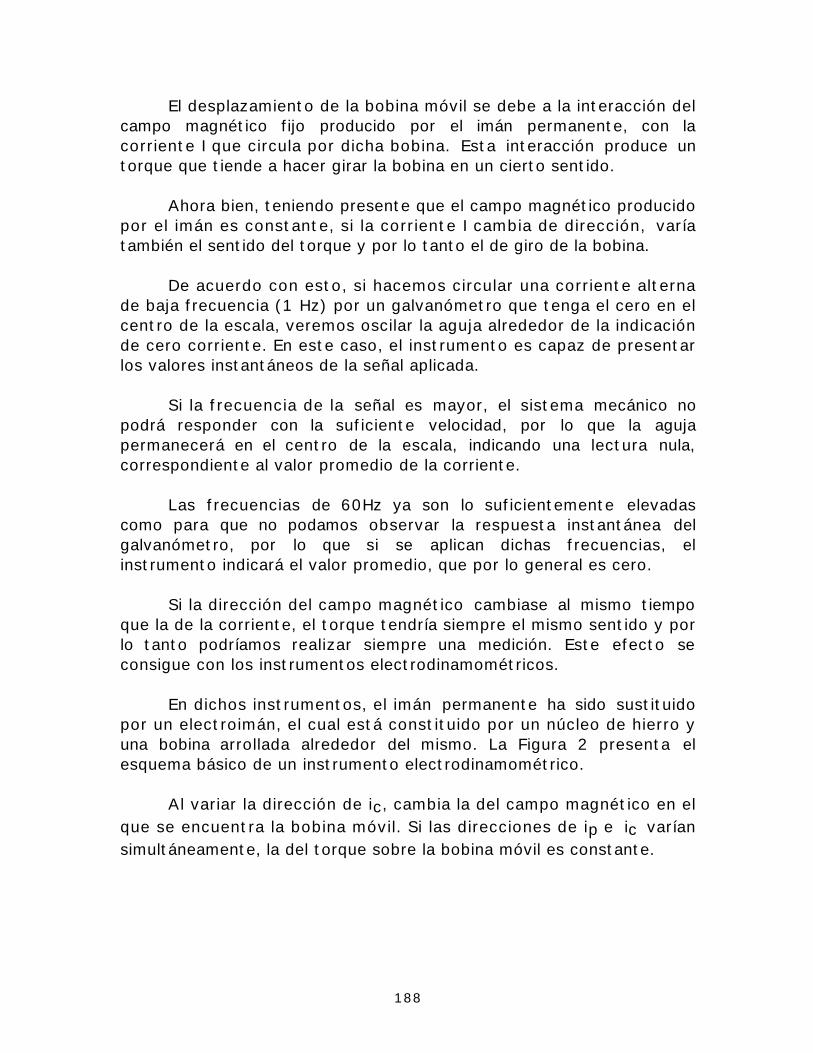
188
El desplazamiento de la bobina móvil se debe a la interacción delcampo magnético fijo producido por el imán permanente, con lacorriente I que circula por dicha bobina. Esta interacción produce untorque que tiende a hacer girar la bobina en un cierto sentido.
Ahora bien, teniendo presente que el campo magnético producidopor el imán es constante, si la corriente I cambia de dirección, varíatambién el sentido del torque y por lo tanto el de giro de la bobina.
De acuerdo con esto, si hacemos circular una corriente alternade baja frecuencia (1 Hz) por un galvanómetro que tenga el cero en elcentro de la escala, veremos oscilar la aguja alrededor de la indicaciónde cero corriente. En este caso, el instrumento es capaz de presentarlos valores instantáneos de la señal aplicada.
Si la frecuencia de la señal es mayor, el sistema mecánico nopodrá responder con la suficiente velocidad, por lo que la agujapermanecerá en el centro de la escala, indicando una lectura nula,correspondiente al valor promedio de la corriente.
Las frecuencias de 60Hz ya son lo suficientemente elevadascomo para que no podamos observar la respuesta instantánea delgalvanómetro, por lo que si se aplican dichas frecuencias, elinstrumento indicará el valor promedio, que por lo general es cero.
Si la dirección del campo magnético cambiase al mismo tiempoque la de la corriente, el torque tendría siempre el mismo sentido y porlo tanto podríamos realizar siempre una medición. Este efecto seconsigue con los instrumentos electrodinamométricos.
En dichos instrumentos, el imán permanente ha sido sustituidopor un electroimán, el cual está constituido por un núcleo de hierro yuna bobina arrollada alrededor del mismo. La Figura 2 presenta elesquema básico de un instrumento electrodinamométrico.
Al variar la dirección de ic, cambia la del campo magnético en elque se encuentra la bobina móvil. Si las direcciones de ip e ic varíansimultáneamente, la del torque sobre la bobina móvil es constante.
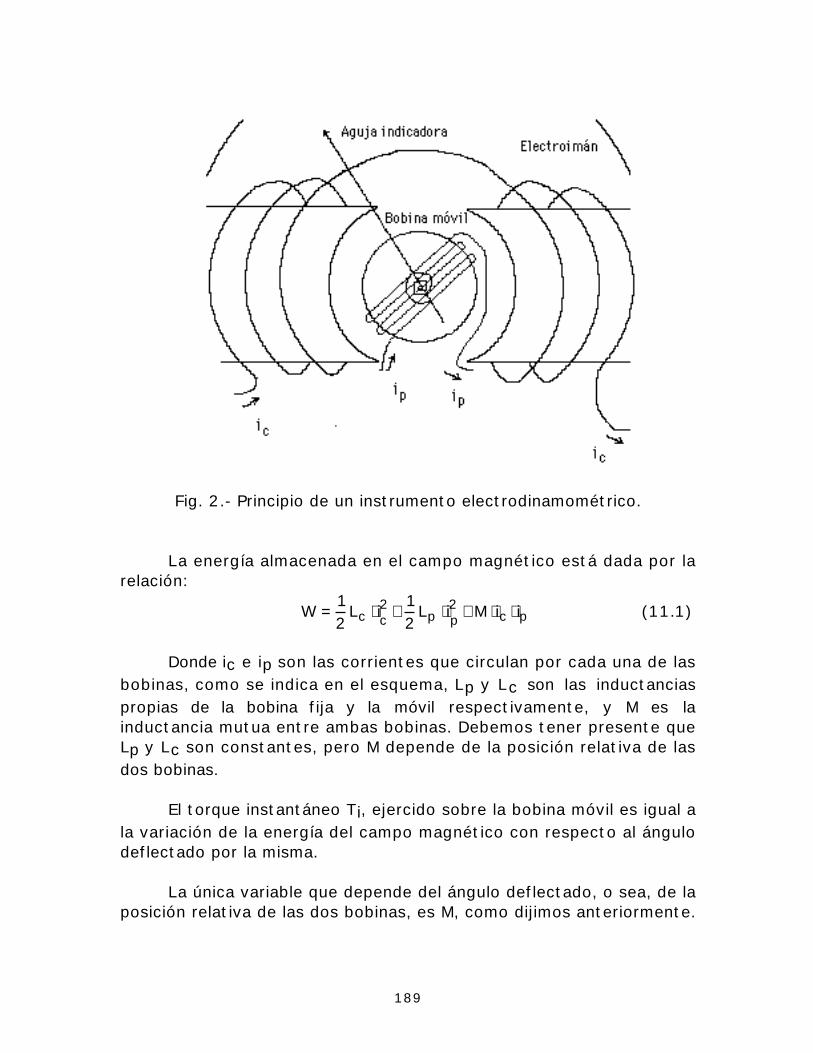
189
Fig. 2.- Principio de un instrumento electrodinamométrico.
La energía almacenada en el campo magnético está dada por larelación:
W =
12
Lc ⋅ ic2 +
12
Lp ⋅ ip2 + M ⋅ ic ⋅ ip (11.1)
Donde ic e ip son las corrientes que circulan por cada una de lasbobinas, como se indica en el esquema, Lp y Lc son las inductanciaspropias de la bobina fija y la móvil respectivamente, y M es lainductancia mutua entre ambas bobinas. Debemos tener presente queLp y Lc son constantes, pero M depende de la posición relativa de lasdos bobinas.
El torque instantáneo Ti, ejercido sobre la bobina móvil es igual ala variación de la energía del campo magnético con respecto al ángulodeflectado por la misma.
La única variable que depende del ángulo deflectado, o sea, de laposición relativa de las dos bobinas, es M, como dijimos anteriormente.
190
Por lo tanto al derivar W con respecto a θ obtenemos la siguienteexpresión:
Ti =
dWdθ
= ic ip dMdθ
(11.2)
El torque promedio es igual a:
Tprom =
1T
Ti 0
T
∫ dt =dMdθ
1T
ip ic0
T
∫ dt (11.3)
El desplazamiento promedio es proporcional al torque promedio.Por definición:
θprom =
Tprom
S(11.4)
Donde S es la constante del resorte. Sustituyendo obtenemos:
θprom =
1S
dMdθ
1T
ic 0
T
∫ ip dt (11.5)
Generalmente se realizan los diseños de forma que
dMdθ
sea
constante. Por lo tanto:
θprom = C ic
0
T
∫ ip dt (11.6)
Donde:
C =
1S
dMdθ
1T
(11.7)
Analizando la expresión (11.6) podemos observar que si ic es lacorriente que circula por una carga e ip es una corriente proporcional alvoltaje existente entre los terminales de la carga, el desplazamientopromedio (θprom) es proporcional a la potencia promedio disipada por lacarga. En efecto, si se cumple:
ic = i (t) (11.8)
191
ip =
e(t)R
(11.9)
Entonces:
θprom =
1S
dMdθ
1T
i(t)0
T
∫e(t)R
dt (11.10)
θprom = (
1S
dMdθ
1R
)1T
e(t) 0
T
∫ i(t) dt (11.11)
Y la expresión:
1T
e(t) 0
T
∫ i(t) dt (11.12)
es por definición la potencia promedio. Por lo tanto:
θprom = C1 Pprom (11.13)
11.3 MEDICION DE POTENCIA CON EL VATIMETRO.
Del desarrollo anterior podemos deducir que los instrumentoselectrodinamométricos pueden utilizarse para medir cualquier tipo deseñal: continua, sinusoidal, triangular, cuadrada, etc.
Vamos a analizar en forma detallada la medición de potencia deseñales continuas y sinusoidales, que son las que se utilizan con másfrecuencia en la práctica.
11.3.1.- Medición de potencia de señales continuas (DC).
Para una señal DC tenemos:
e(t) = E = constante i(t )= I = constante
A T le asignamos un valor arbitrario. Con estas condiciones, eldesplazamiento promedio está dado por la siguiente relación:
192
θprom =
1S
dMdθ
1R
1T
EIdt =1S
0
T
∫dMdθ
1R
1T
E ⋅ I ⋅ T = C2E ⋅ I = C2P (11.14)
El desplazamiento es proporcional a la potencia, ya que P=E.I.
11.3.2.- Medición de potencia de señales sinusoidales.
Para una señal sinusoidal:
e(t) = Emaxsen(wt) (11.15)
i(t) = Imaxsen(wt+ φ) (11.16)
Donde φ es el ángulo de desfasaje entre el voltaje y la corriente.La frecuencia angular está dada por la relación w = 2πf, donde f es elinverso del período T. Con estas condiciones, el desplazamientopromedio está dado por la siguiente relación:
θprom =
1S
1R
dMdθ
1T
Emax0
T
∫ Imaxsen(wt)sen(wt +φ )dt (11.17)
θprom = KEmaxImax
1T
sen(wt)sen(wt +φ )dt =0
T
∫
= KEmaxImax
1T
(cosφ
20
T
∫ −cos(2wt + φ)
2)dt =
=
KT
EmaxImaxcosφT2
= KEmaxImax
2cosφ = KPprom (11.18)
Ya que se cumple que:
Pprom = E I cosφ (11.19)
Donde cos φ es el factor de potencia, E es el valor eficaz delvoltaje e I es el valor eficaz de la corriente, dados por las relaciones:
E =
Emax
2 I =
Imax
2(11.20)
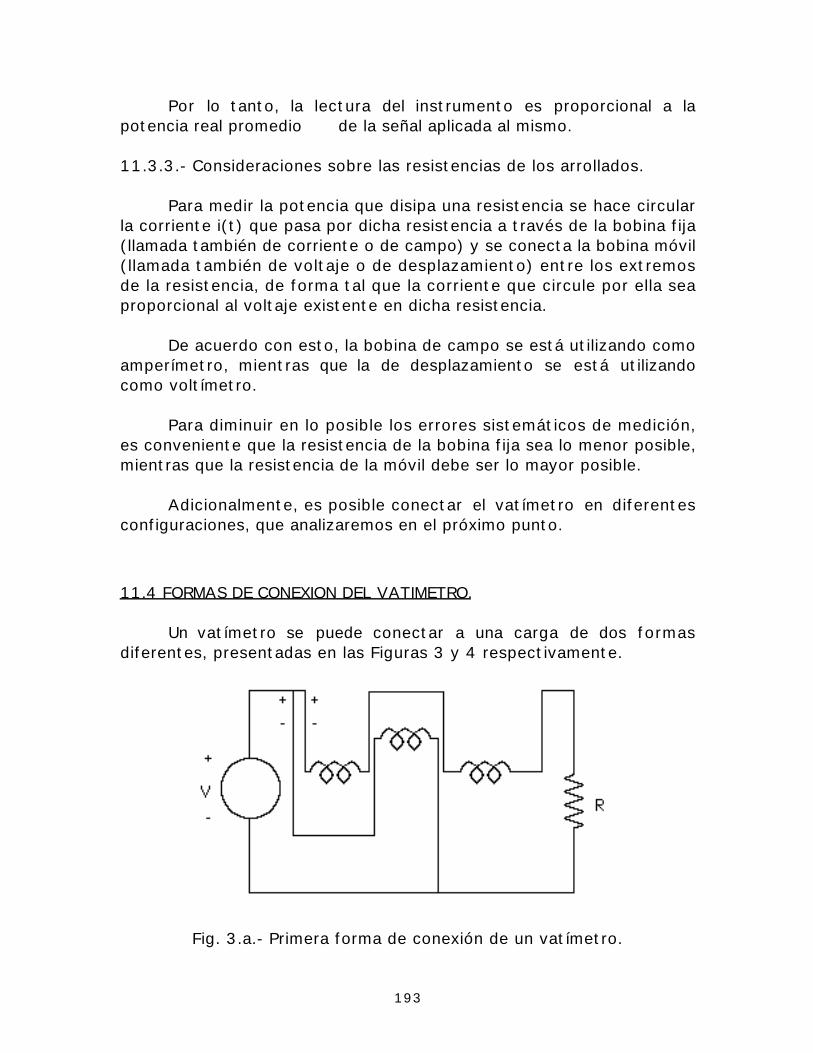
193
Por lo tanto, la lectura del instrumento es proporcional a lapotencia real promedio de la señal aplicada al mismo.
11.3.3.- Consideraciones sobre las resistencias de los arrollados.
Para medir la potencia que disipa una resistencia se hace circularla corriente i(t) que pasa por dicha resistencia a través de la bobina fija(llamada también de corriente o de campo) y se conecta la bobina móvil(llamada también de voltaje o de desplazamiento) entre los extremosde la resistencia, de forma tal que la corriente que circule por ella seaproporcional al voltaje existente en dicha resistencia.
De acuerdo con esto, la bobina de campo se está utilizando comoamperímetro, mientras que la de desplazamiento se está utilizandocomo voltímetro.
Para diminuir en lo posible los errores sistemáticos de medición,es conveniente que la resistencia de la bobina fija sea lo menor posible,mientras que la resistencia de la móvil debe ser lo mayor posible.
Adicionalmente, es posible conectar el vatímetro en diferentesconfiguraciones, que analizaremos en el próximo punto.
11.4 FORMAS DE CONEXION DEL VATIMETRO.
Un vatímetro se puede conectar a una carga de dos formasdiferentes, presentadas en las Figuras 3 y 4 respectivamente.
Fig. 3.a.- Primera forma de conexión de un vatímetro.
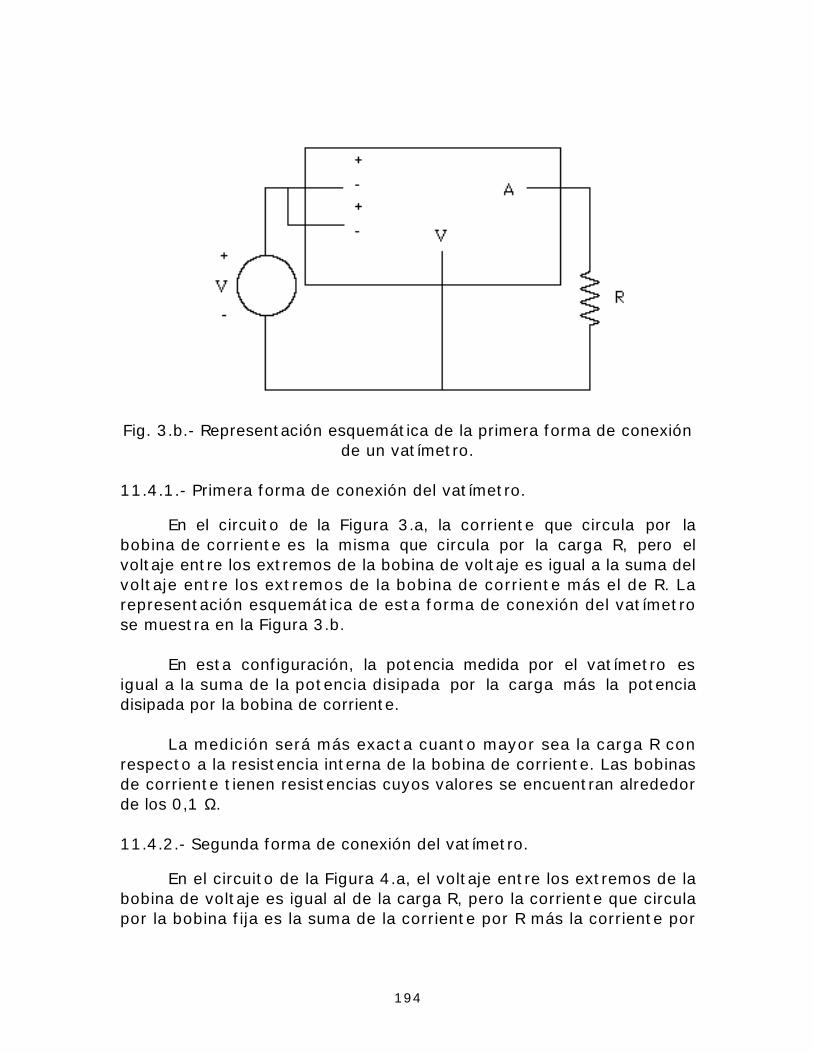
194
Fig. 3.b.- Representación esquemática de la primera forma de conexiónde un vatímetro.
11.4.1.- Primera forma de conexión del vatímetro.
En el circuito de la Figura 3.a, la corriente que circula por labobina de corriente es la misma que circula por la carga R, pero elvoltaje entre los extremos de la bobina de voltaje es igual a la suma delvoltaje entre los extremos de la bobina de corriente más el de R. Larepresentación esquemática de esta forma de conexión del vatímetrose muestra en la Figura 3.b.
En esta configuración, la potencia medida por el vatímetro esigual a la suma de la potencia disipada por la carga más la potenciadisipada por la bobina de corriente.
La medición será más exacta cuanto mayor sea la carga R conrespecto a la resistencia interna de la bobina de corriente. Las bobinasde corriente tienen resistencias cuyos valores se encuentran alrededorde los 0,1 Ω.
11.4.2.- Segunda forma de conexión del vatímetro.
En el circuito de la Figura 4.a, el voltaje entre los extremos de labobina de voltaje es igual al de la carga R, pero la corriente que circulapor la bobina fija es la suma de la corriente por R más la corriente por
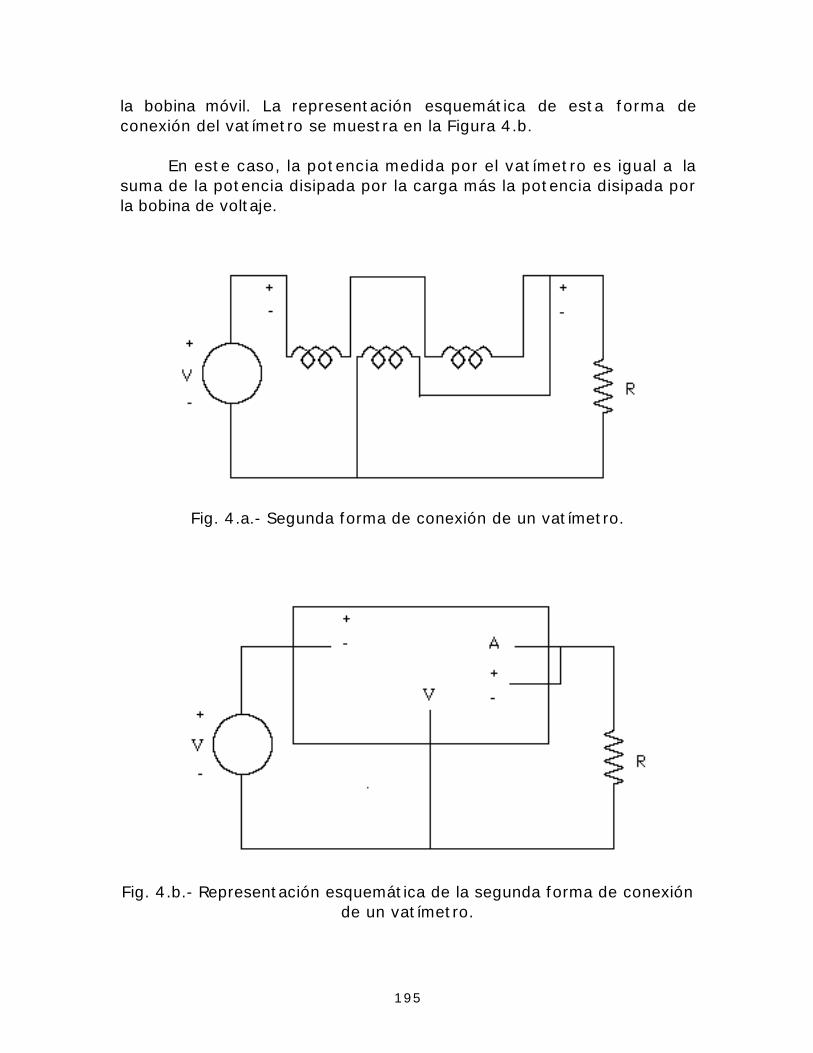
195
la bobina móvil. La representación esquemática de esta forma deconexión del vatímetro se muestra en la Figura 4.b.
En este caso, la potencia medida por el vatímetro es igual a lasuma de la potencia disipada por la carga más la potencia disipada porla bobina de voltaje.
Fig. 4.a.- Segunda forma de conexión de un vatímetro.
Fig. 4.b.- Representación esquemática de la segunda forma de conexiónde un vatímetro.
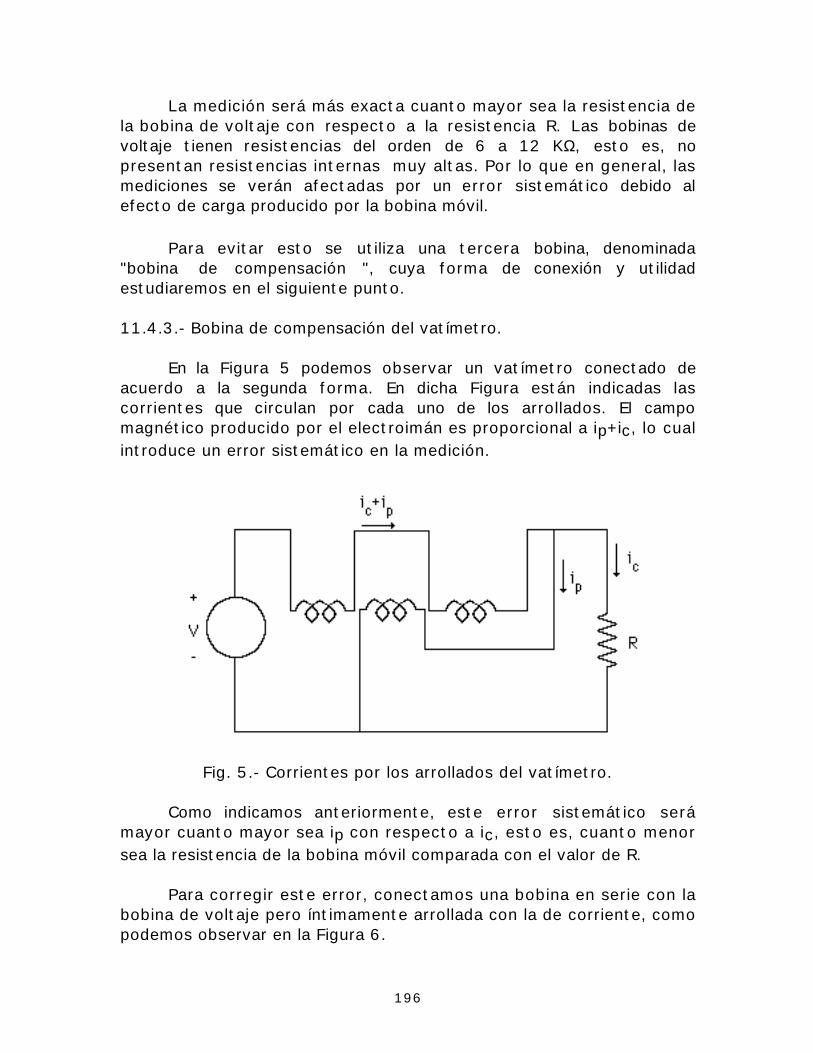
196
La medición será más exacta cuanto mayor sea la resistencia dela bobina de voltaje con respecto a la resistencia R. Las bobinas devoltaje tienen resistencias del orden de 6 a 12 KΩ, esto es, nopresentan resistencias internas muy altas. Por lo que en general, lasmediciones se verán afectadas por un error sistemático debido alefecto de carga producido por la bobina móvil.
Para evitar esto se utiliza una tercera bobina, denominada"bobina de compensación ", cuya forma de conexión y utilidadestudiaremos en el siguiente punto.
11.4.3.- Bobina de compensación del vatímetro.
En la Figura 5 podemos observar un vatímetro conectado deacuerdo a la segunda forma. En dicha Figura están indicadas lascorrientes que circulan por cada uno de los arrollados. El campomagnético producido por el electroimán es proporcional a ip+ic, lo cualintroduce un error sistemático en la medición.
Fig. 5.- Corrientes por los arrollados del vatímetro.
Como indicamos anteriormente, este error sistemático serámayor cuanto mayor sea ip con respecto a ic, esto es, cuanto menorsea la resistencia de la bobina móvil comparada con el valor de R.
Para corregir este error, conectamos una bobina en serie con labobina de voltaje pero íntimamente arrollada con la de corriente, comopodemos observar en la Figura 6.
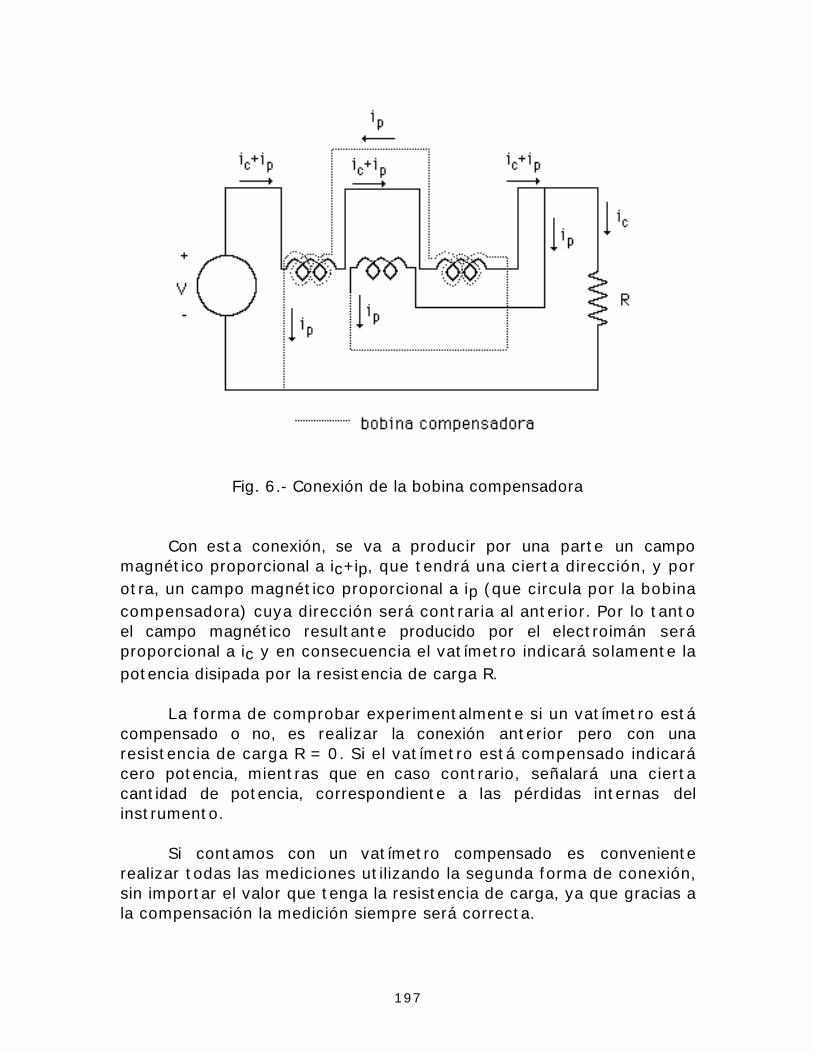
197
Fig. 6.- Conexión de la bobina compensadora
Con esta conexión, se va a producir por una parte un campomagnético proporcional a ic+ip, que tendrá una cierta dirección, y porotra, un campo magnético proporcional a ip (que circula por la bobinacompensadora) cuya dirección será contraria al anterior. Por lo tantoel campo magnético resultante producido por el electroimán seráproporcional a ic y en consecuencia el vatímetro indicará solamente lapotencia disipada por la resistencia de carga R.
La forma de comprobar experimentalmente si un vatímetro estácompensado o no, es realizar la conexión anterior pero con unaresistencia de carga R = 0. Si el vatímetro está compensado indicarácero potencia, mientras que en caso contrario, señalará una ciertacantidad de potencia, correspondiente a las pérdidas internas delinstrumento.
Si contamos con un vatímetro compensado es convenienterealizar todas las mediciones utilizando la segunda forma de conexión,sin importar el valor que tenga la resistencia de carga, ya que gracias ala compensación la medición siempre será correcta.
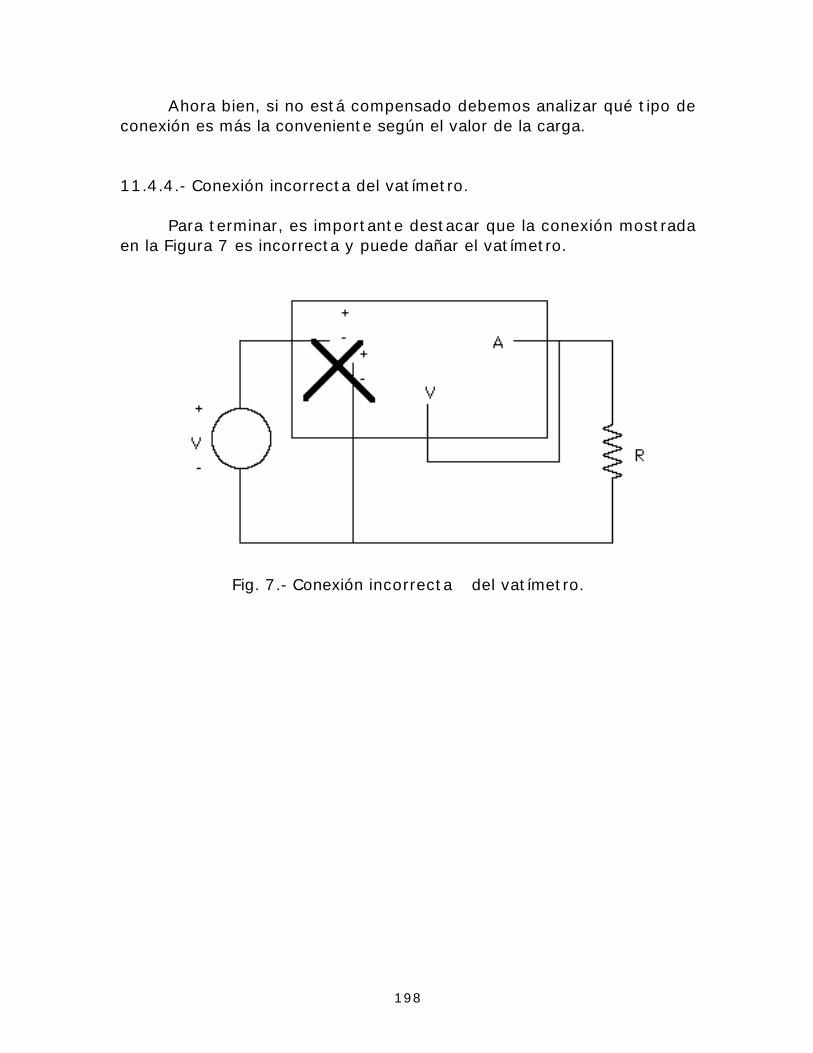
198
Ahora bien, si no está compensado debemos analizar qué tipo deconexión es más la conveniente según el valor de la carga.
11.4.4.- Conexión incorrecta del vatímetro.
Para terminar, es importante destacar que la conexión mostradaen la Figura 7 es incorrecta y puede dañar el vatímetro.
Fig. 7.- Conexión incorrecta del vatímetro.
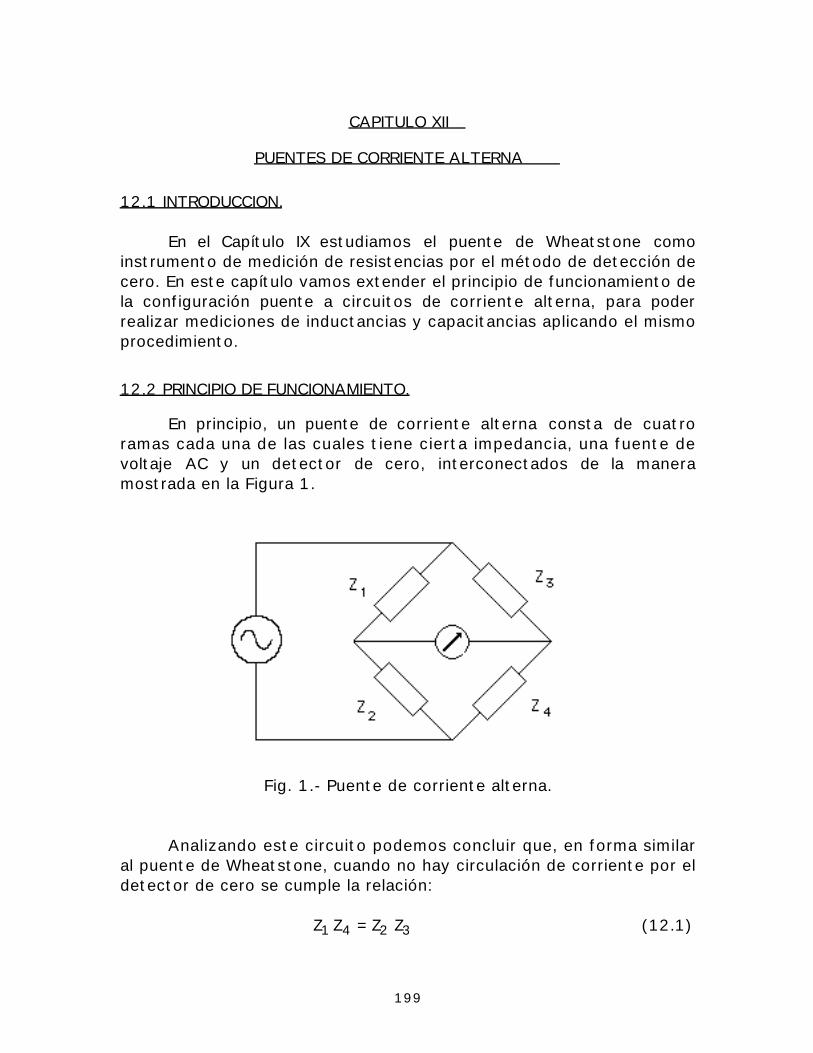
199
CAPITULO XII
PUENTES DE CORRIENTE ALTERNA
12.1 INTRODUCCION.
En el Capítulo IX estudiamos el puente de Wheatstone comoinstrumento de medición de resistencias por el método de detección decero. En este capítulo vamos extender el principio de funcionamiento dela configuración puente a circuitos de corriente alterna, para poderrealizar mediciones de inductancias y capacitancias aplicando el mismoprocedimiento.
12.2 PRINCIPIO DE FUNCIONAMIENTO.
En principio, un puente de corriente alterna consta de cuatroramas cada una de las cuales tiene cierta impedancia, una fuente devoltaje AC y un detector de cero, interconectados de la maneramostrada en la Figura 1.
Fig. 1.- Puente de corriente alterna.
Analizando este circuito podemos concluir que, en forma similaral puente de Wheatstone, cuando no hay circulación de corriente por eldetector de cero se cumple la relación:
Z1 Z4 = Z2 Z3 (12.1)
200
Como la impedancia de una rama depende tanto del valor de losparámetros de los elementos circuitales como de la frecuencia deoperación, esta última también tiene influencia sobre el balance delpuente, por lo que en general, además de indicar los valores deresistencias, capacitancias e inductancias para los cuales se obtienedicho balance, es necesario especificar la frecuencia a la que se estátrabajando.
Algunos puentes se diseñan de tal forma que el balance de losmismos no depende de la frecuencia de operación, pero estos soncasos particulares y no constituyen la regla general.
En este análisis estamos suponiendo que los parámetros de loselementos del circuito, esto es, las resistencias, capacitancias einductancias, son independientes de la frecuencia dentro de rango enque estamos trabajando.
El rango de frecuencias en el que va a operar un determinadopuente depende del oscilador y del detector de cero utilizados en sudiseño. Entre los detectores más empleados se encuentran losaudífonos, los galvanómetros de AC y los osciloscopios.
Otra característica de estos puentes es que no es posibleconseguir el balance para cualquier combinación de resistencias,capacitancias e inductancias que queramos conectar en sus ramas. Enefecto, supongamos que Zl Y Z2 son resistencias, Z3 es un inductor yZ4 un capacitor. Según la relación (12.1) se debe cumplir que:
R1(jwL3)=R2(-j/wC4) (12.2)
No existe ninguna combinación de w, R1, R2, L3, C4 y capaz decumplir con la relación anterior, ya que para que esto fuese posible,alguno de los cinco parámetros debería ser negativo, lo cualfísicamente no tiene sentido.
12.3 COMPONENTES A MEDIR CON EL PUENTE DE CORRIENTE ALTERNA.
Los inductores y capacitores reales no son puramente reactivos,sino que presentan una cierta disipación de potencia, que podemosrepresentar en un modelo circuital mediante una resistencia conectadaen serie o en paralelo con el elemento ideal. De acuerdo con esto,podemos utilizar los modelos presentados en la Figura 2.
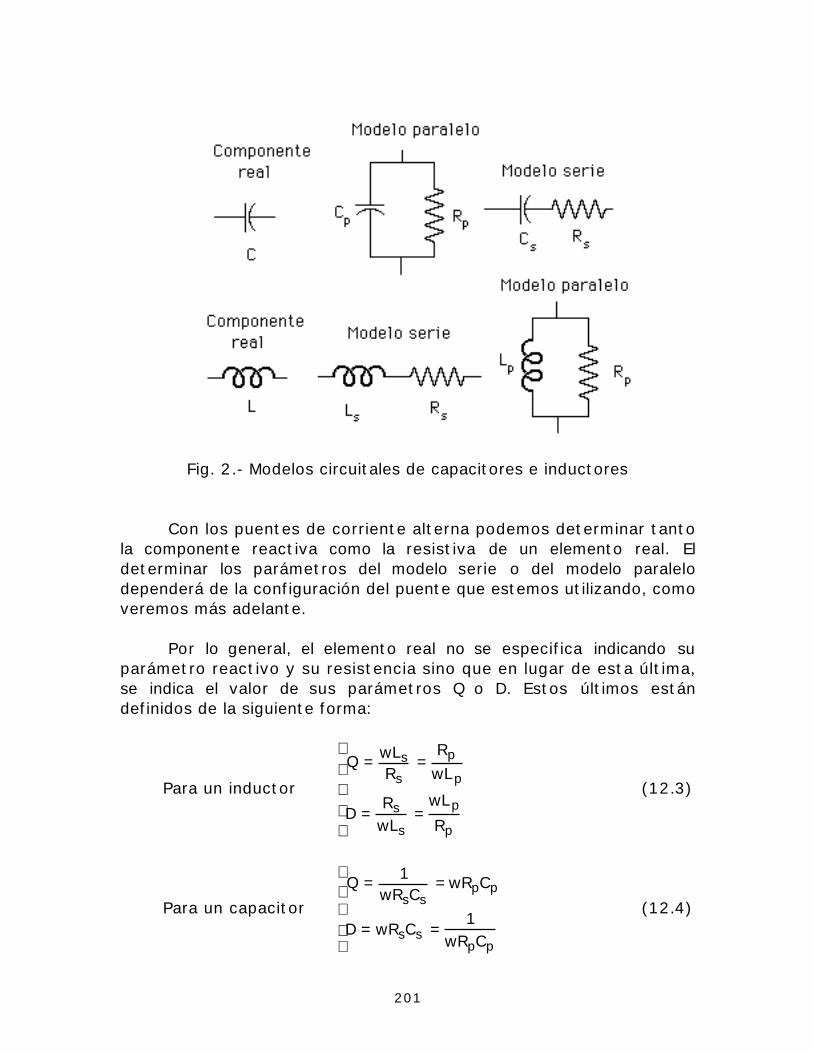
201
Fig. 2.- Modelos circuitales de capacitores e inductores
Con los puentes de corriente alterna podemos determinar tantola componente reactiva como la resistiva de un elemento real. Eldeterminar los parámetros del modelo serie o del modelo paralelodependerá de la configuración del puente que estemos utilizando, comoveremos más adelante.
Por lo general, el elemento real no se especifica indicando suparámetro reactivo y su resistencia sino que en lugar de esta última,se indica el valor de sus parámetros Q o D. Estos últimos estándefinidos de la siguiente forma:
Para un inductor
Q = wLsRs
=Rp
wLp
D =Rs
wLs=
wLp
Rp
(12.3)
Para un capacitor
Q = 1wRsCs
= wRpCp
D = wRsCs =1
wRpCp
(12.4)
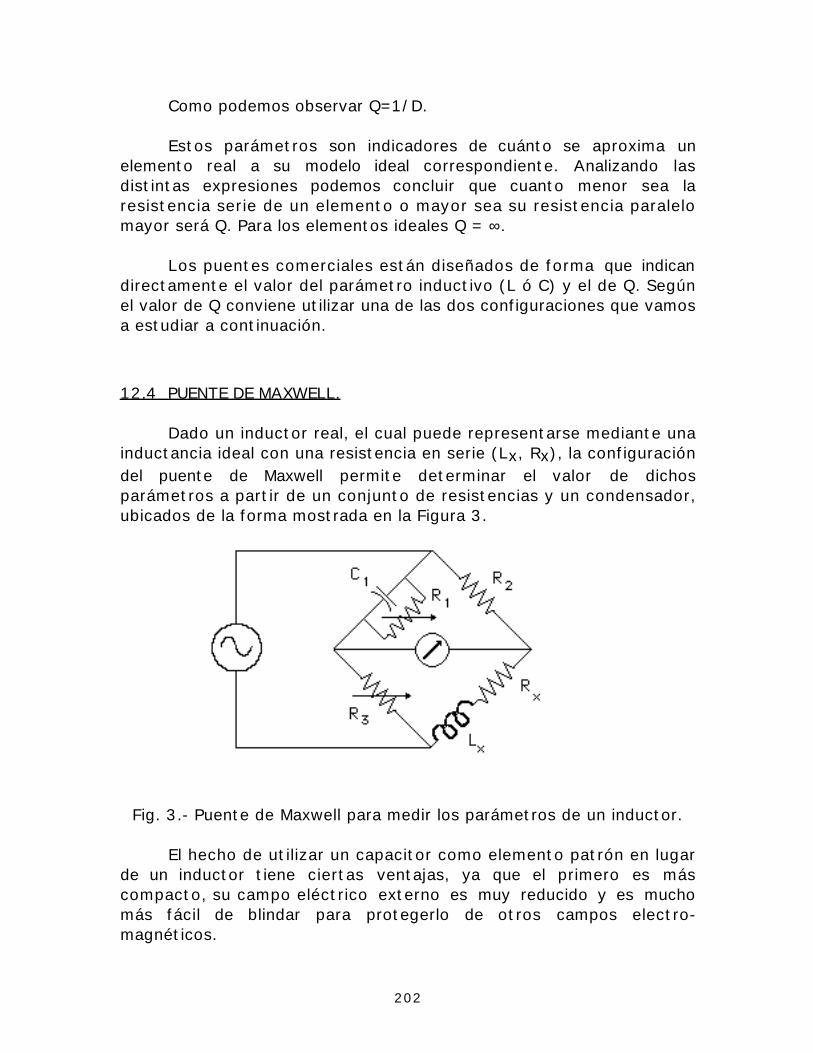
202
Como podemos observar Q=1/D.
Estos parámetros son indicadores de cuánto se aproxima unelemento real a su modelo ideal correspondiente. Analizando lasdistintas expresiones podemos concluir que cuanto menor sea laresistencia serie de un elemento o mayor sea su resistencia paralelomayor será Q. Para los elementos ideales Q = ∞.
Los puentes comerciales están diseñados de forma que indicandirectamente el valor del parámetro inductivo (L ó C) y el de Q. Segúnel valor de Q conviene utilizar una de las dos configuraciones que vamosa estudiar a continuación.
12.4 PUENTE DE MAXWELL.
Dado un inductor real, el cual puede representarse mediante unainductancia ideal con una resistencia en serie (Lx, Rx), la configuracióndel puente de Maxwell permite determinar el valor de dichosparámetros a partir de un conjunto de resistencias y un condensador,ubicados de la forma mostrada en la Figura 3.
Fig. 3.- Puente de Maxwell para medir los parámetros de un inductor.
El hecho de utilizar un capacitor como elemento patrón en lugarde un inductor tiene ciertas ventajas, ya que el primero es máscompacto, su campo eléctrico externo es muy reducido y es muchomás fácil de blindar para protegerlo de otros campos electro-magnéticos.
203
La relación existente entre los componentes cuando el puenteestá balanceado es la siguiente:
Z1Zx = Z2Z3 (12.5)
Z1Zx = R2R3 (12.6)
Zx = R2R3Y1 (12.7)
Y1 =
1R1
+ jwC1 (12.8)
Zx = R2R3(
1R1
+ jwC1) (12.9)
Rx + jwLx = R2R3(
1R1
+ jwC1) (12.10)
Rx =
R2R3R1
(12.11)
Lx = R2R3C1 (12.12)
Q =wR2R3C1
R2R3R1
= wR1C1 (12.13)
En primer lugar, podemos observar que los valores de Lx y Rx nodependen de la frecuencia de operación, sino que están relacionadosúnicamente con los valores de C1 y R1, R2 Y R3.
Por otra parte, existe una interacción entre las resistencias deajuste, ya que tanto R1 como R3 intervienen en la ecuación de Rx,mientras que en la de Lx solo interviene R3.
De acuerdo con esto, es necesario realizar varios ajustessucesivos de las dos resistencias variables hasta obtener la condiciónde cero en el detector. Por lo tanto, el balance de este tipo de puenteresulta mucho más complejo y laborioso que el de un puente deWheatstone de corriente continua.
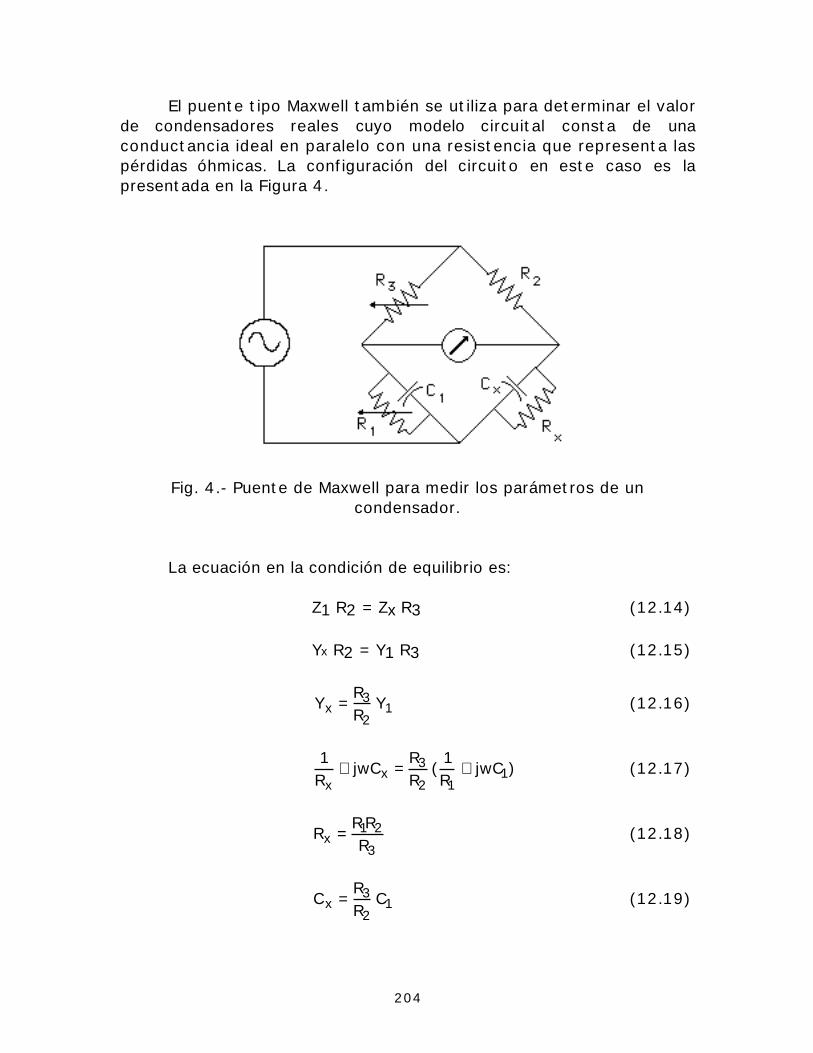
204
El puente tipo Maxwell también se utiliza para determinar el valorde condensadores reales cuyo modelo circuital consta de unaconductancia ideal en paralelo con una resistencia que representa laspérdidas óhmicas. La configuración del circuito en este caso es lapresentada en la Figura 4.
Fig. 4.- Puente de Maxwell para medir los parámetros de uncondensador.
La ecuación en la condición de equilibrio es:
Z1 R2 = Zx R3 (12.14)
Yx R2 = Y1 R3 (12.15)
Yx =
R3R2
Y1 (12.16)
1Rx
+ jwCx =R3R2
(1R1
+ jwC1) (12.17)
Rx =
R1R2R3
(12.18)
Cx =
R3R2
C1 (12.19)

205
Q = w
R1R2R3
R3R2
C1 = wR1C1 (12.20)
Como en el caso anterior, los valores de Cx y Rx sonindependientes de la frecuencia, e igualmente existe interacción entrelos elementos de ajuste, debido a que ambos aparecen en la expresiónde Rx.
Si los parámetros de ajuste fuesen R1 y C1 en lugar de R1 y R3,desaparecería la interacción presente actualmente.
La desventaja de un puente en el que el elemento variable es uncondensador es el hecho de que resulta difícil hallar capacitoresvariables de precisión con valores comprendidos dentro de un rangoadecuado para poder hacer un diseño de este tipo.
La configuración del Puente de Maxwell ofrece muy buenosresultados siempre y cuando la Q del circuito no sea demasiado grande,esto es, mientras Rx del inductor no sea muy pequeña o Rx delcondensador no sea excesivamente grande, ya que en caso contrario,R1 debería tomar valores mayores que los que ofrecen las resistenciasde ajuste disponibles. En estos casos es necesario utilizar otro tipo deconfiguración, que analizaremos a continuación.
12.5 PUENTE DE HAY.
La configuración de este tipo de puente para medir inductoresreales, cuyo modelo circuital consta de una inductancia en serie conuna resistencia es la mostrada en la Figura 5.
Fig. 5 .- Puente de Hay para medir los parámetros de un inductor.
206
La ecuación de balance para este puente es la siguiente:
(R1− j
1wC1
)(Rx + jwLx ) = R2R3 (12.21)
Esta ecuación puede separarse en las siguientes:
R1 Rx +
LxC1
= R2 R3 (12.22)
R1 w Lx −
RxwC1
= 0 (12.23)
De donde:
Lx =R2 R3 C1
1+ w2 C12 R
12
(12.24)
Rx =w2 C1
2 R1 R2 R3
1+ w2 C12 R
12
(12.25)
Q =wLxRx
w R2 R3 C1
w2 C12 R1 R2 R3
=1
w C1 R1(12.26)
Como podemos observar, los valores de Lx y Rx además dedepender de los parámetros del puente, dependen de la frecuencia deoperación y las expresiones para calcular Lx y Rx son complejas.
Ahora bien, en el punto anterior indicamos que esta configuraciónla vamos a utilizar cuando el valor de Q sea elevado, ya que en casocontrario es conveniente emplear el puente de Maxwell.
Como Q=1/wC1R1, cuando Q>>l, podemos considerar que losdenominadores tanto de Lx como de Rx son igual a 1, sin introducir enla medición del inductor un error mayor que el debido a la exactitudcon la que se conoce el valor real de los otros elementos del puente.Con esta aproximación, las fórmulas para Lx y Rx son:
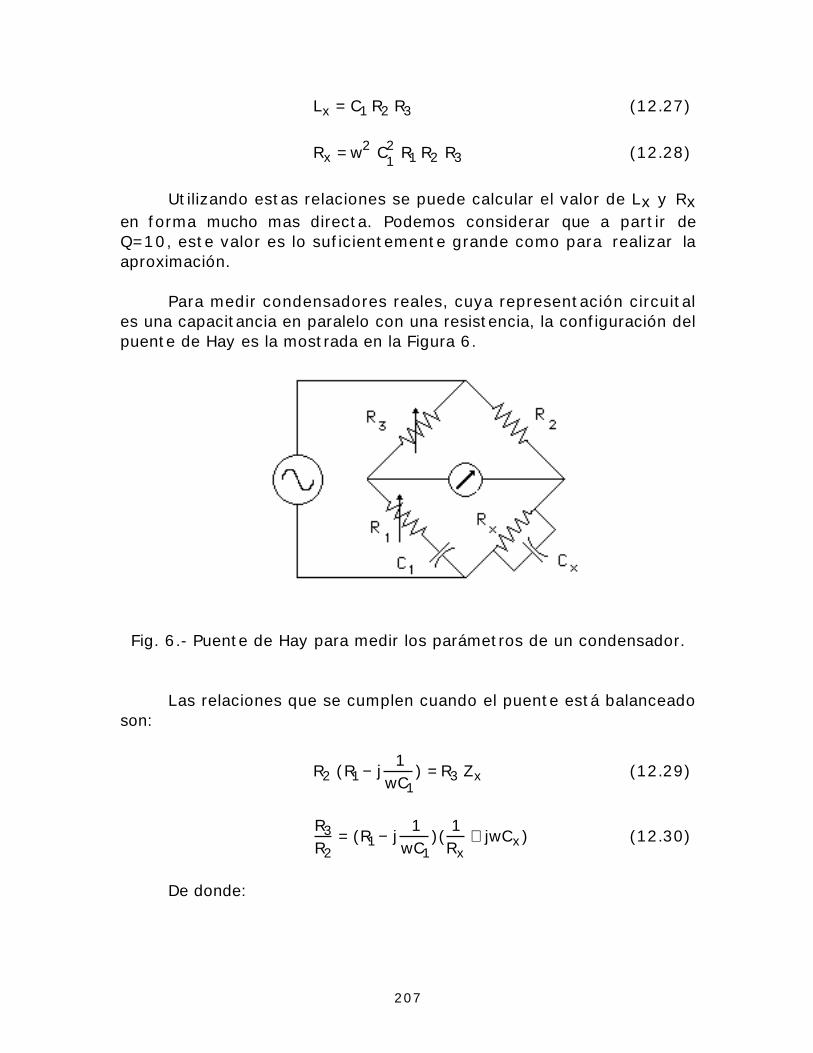
207
Lx = C1 R2 R3 (12.27)
Rx = w2 C1
2 R1 R2 R3 (12.28)
Utilizando estas relaciones se puede calcular el valor de Lx y Rxen forma mucho mas directa. Podemos considerar que a partir deQ=10, este valor es lo suficientemente grande como para realizar laaproximación.
Para medir condensadores reales, cuya representación circuitales una capacitancia en paralelo con una resistencia, la configuración delpuente de Hay es la mostrada en la Figura 6.
Fig. 6.- Puente de Hay para medir los parámetros de un condensador.
Las relaciones que se cumplen cuando el puente está balanceadoson:
R2 (R1− j
1wC1
) = R3 Zx (12.29)
R3R2
= (R1− j1
wC1)(
1Rx
+ jwCx ) (12.30)
De donde:
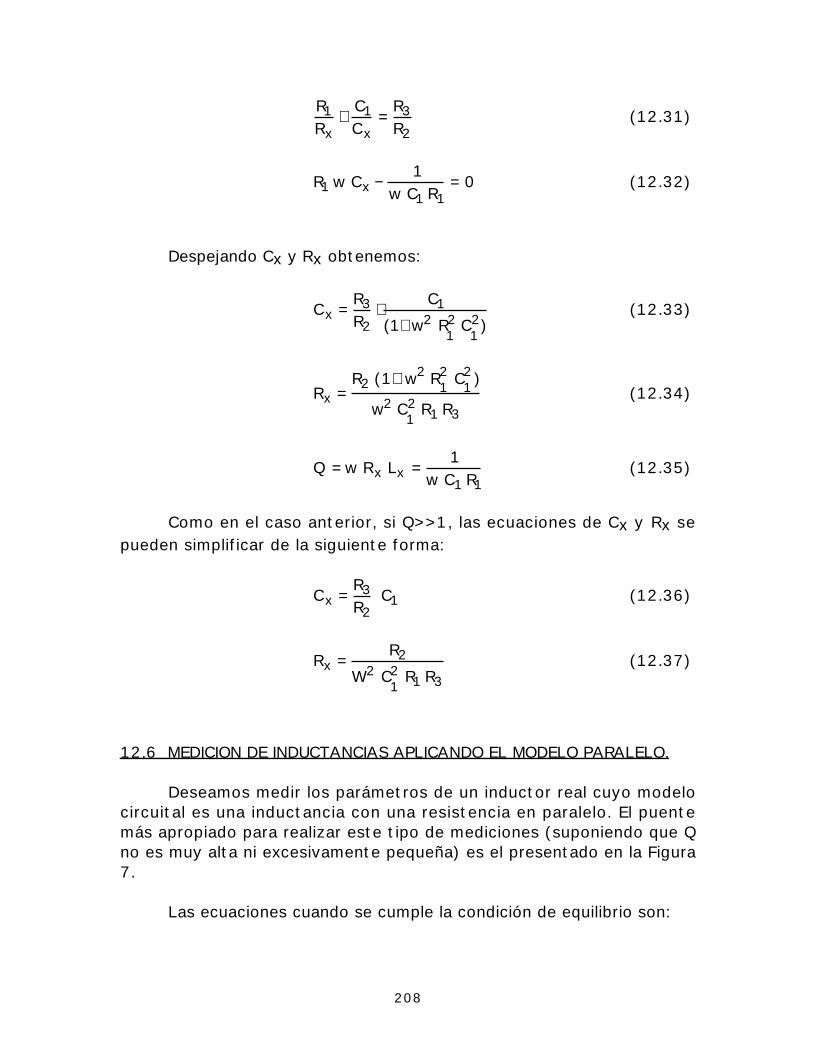
208
R1Rx
+C1Cx
=R3R2
(12.31)
R1 w Cx −
1w C1 R1
= 0 (12.32)
Despejando Cx y Rx obtenemos:
Cx =R3R2
⋅C1
(1+ w2 R12 C
12)
(12.33)
Rx =R2 (1+ w2 R1
2 C12)
w2 C12 R1 R3
(12.34)
Q = w Rx Lx =
1w C1 R1
(12.35)
Como en el caso anterior, si Q>>1, las ecuaciones de Cx y Rx sepueden simplificar de la siguiente forma:
Cx =
R3R2
C1 (12.36)
Rx =R2
W2 C12 R1 R3
(12.37)
12.6 MEDICION DE INDUCTANCIAS APLICANDO EL MODELO PARALELO.
Deseamos medir los parámetros de un inductor real cuyo modelocircuital es una inductancia con una resistencia en paralelo. El puentemás apropiado para realizar este tipo de mediciones (suponiendo que Qno es muy alta ni excesivamente pequeña) es el presentado en la Figura7.
Las ecuaciones cuando se cumple la condición de equilibrio son:
209
Fig. 7.- Medición de inductancias aplicando el modelo paralelo.
R3 R2 = Z1 Zp =
Z1Yp
(12.38)
Yp =
Z1R2 R3
(12.39)
(
1Rp
−j
wLp) =
1R2 R3
(R1−j
wC1) (12.40)
De donde:
Rp =
R2 R3R1
(12.41)
Lp = R2 R3 C1 (12.42)
Q =
1w R1 C1
(12.43)
12.7 MEDICION DE CAPACITANCIAS APLICANDO EL MODELO SERIE.
El puente más apropiado para realizar las mediciones de losparámetros de un condensador real utilizando el modelo serie es elpresentado en la Figura 8.

210
Fig. 8.- Medición de capacitancias aplicando el modelo serie.
Las relaciones que se cumplen cuando el puente está balanceadoson:
R3 (Rx −
jwCx
) = R2 (R1−j
wC1) (12.44)
De donde:
Rx =
R1 R2R3
(12.45)
Cx =
R3R2
C1 (12.46)
Q =
1w R1 C1
(12.47)
12.8 DISEÑO DE UN PUENTE AC.
Para diseñar un puente de corriente alterna, debemos conocerlos siguientes datos:
1.- Qué clase de elemento deseamos medir (inductor ocapacitor).
211
2.- Cuál es el modelo circuital con el que deseamos representarlo(serie o paralelo).
3.- Cuál es el orden de magnitud de los parámetros que queremosmedir (L, C, R, Q, D).
4.- Cuál es el rango de frecuencia en el que vamos a trabajar.
5.- Los valores y rango de variación de los elementos de quedisponemos para implementar el puente.
Analizando en forma cualitativa un puente de corriente alterna,podemos concluir que al igual que en el caso del puente de Wheatstone,las mediciones que se realicen con él serán tanto mejores cuantomayor sea la sensibilidad del detector de cero, mayor sea el voltajepico a pico del generador de alterna y menores sean las impedancias desus ramas. De las dos últimas condiciones deducimos que el valormáximo del generador dependerá de la máxima potencia que puedendisipar los componentes resistivos, el máximo voltaje que se les puedaaplicar a los componentes capacitivos y la máxima corriente que puedacircular por los componentes inductivos.
12.9 SENSIBILIDAD DEL PUENTE AC.
El concepto de la sensibilidad de un puente de corriente alternaes el mismo que para los puentes de Wheatstone, con la diferencia deque aquí se pueden definir dos sensibilidades: La correspondientecuando se produce una variación de la parte reactiva del elementoincógnita y la correspondiente cuando se produce una variación de laparte resistiva de dicho elemento. Dichas sensibilidades se definenmediante la siguientes relaciones:
S =
Variación en el detector de cero∆X x
(12.48)
S =
Variación en el detector de cero∆Rx
(12.49)
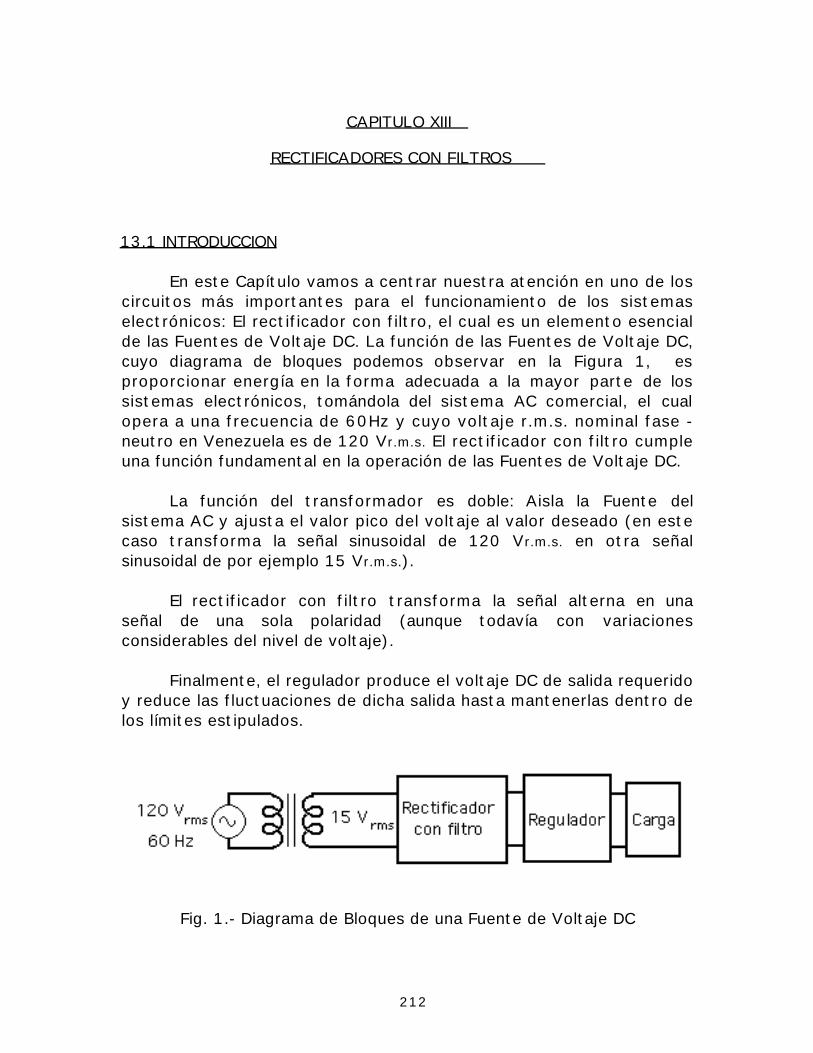
212
CAPITULO XIII
RECTIFICADORES CON FILTROS
13.1 INTRODUCCION
En este Capítulo vamos a centrar nuestra atención en uno de loscircuitos más importantes para el funcionamiento de los sistemaselectrónicos: El rectificador con filtro, el cual es un elemento esencialde las Fuentes de Voltaje DC. La función de las Fuentes de Voltaje DC,cuyo diagrama de bloques podemos observar en la Figura 1, esproporcionar energía en la forma adecuada a la mayor parte de lossistemas electrónicos, tomándola del sistema AC comercial, el cualopera a una frecuencia de 60Hz y cuyo voltaje r.m.s. nominal fase -neutro en Venezuela es de 120 Vr.m.s. El rectificador con filtro cumpleuna función fundamental en la operación de las Fuentes de Voltaje DC.
La función del transformador es doble: Aisla la Fuente delsistema AC y ajusta el valor pico del voltaje al valor deseado (en estecaso transforma la señal sinusoidal de 120 Vr.m.s. en otra señalsinusoidal de por ejemplo 15 Vr.m.s.).
El rectificador con filtro transforma la señal alterna en unaseñal de una sola polaridad (aunque todavía con variacionesconsiderables del nivel de voltaje).
Finalmente, el regulador produce el voltaje DC de salida requeridoy reduce las fluctuaciones de dicha salida hasta mantenerlas dentro delos límites estipulados.
Fig. 1.- Diagrama de Bloques de una Fuente de Voltaje DC
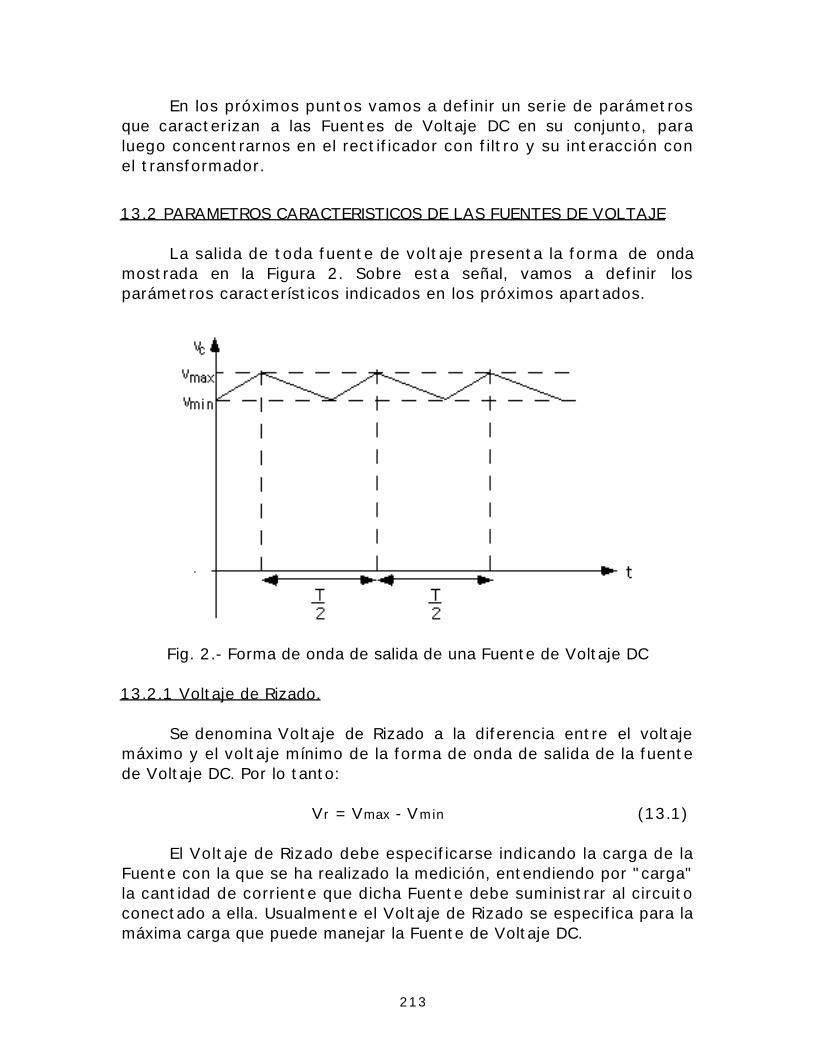
213
En los próximos puntos vamos a definir un serie de parámetrosque caracterizan a las Fuentes de Voltaje DC en su conjunto, paraluego concentrarnos en el rectificador con filtro y su interacción conel transformador.
13.2 PARAMETROS CARACTERISTICOS DE LAS FUENTES DE VOLTAJE
La salida de toda fuente de voltaje presenta la forma de ondamostrada en la Figura 2. Sobre esta señal, vamos a definir losparámetros característicos indicados en los próximos apartados.
Fig. 2.- Forma de onda de salida de una Fuente de Voltaje DC
13.2.1 Voltaje de Rizado.
Se denomina Voltaje de Rizado a la diferencia entre el voltajemáximo y el voltaje mínimo de la forma de onda de salida de la fuentede Voltaje DC. Por lo tanto:
Vr = Vmax - Vmin (13.1)
El Voltaje de Rizado debe especificarse indicando la carga de laFuente con la que se ha realizado la medición, entendiendo por "carga"la cantidad de corriente que dicha Fuente debe suministrar al circuitoconectado a ella. Usualmente el Voltaje de Rizado se especifica para lamáxima carga que puede manejar la Fuente de Voltaje DC.
214
13.2.2 Factor de Rizado
Se denomina Factor de Rizado a la relación porcentual entre elVoltaje de Rizado y el valor máximo de la Fuente de Voltaje DC. Estoes:
Fr = Vr
Vmax x 100% =
Vmax - V minVmax
x 100% (13.2)
13.2.3 Regulación de Carga
La Regulación de Carga es una medida de la capacidad de laFuente de Voltaje DC de mantener constante su voltaje de salidacuando varía la carga conectada a ella, es decir, la cantidad decorriente que debe proporcionarle al circuito que está alimentando. Sedefine utilizando la siguiente expresión:
Rc = VoImax - V oImin
VoImax x 100% (13.3)
Donde:
VoImin = Voltaje de salida a máxima carga
VoImax = Voltaje de salida sin carga (corriente cero)
Cuanto mejor es la calidad del regulador de la Fuente de VoltajeDC , menor es la Regulación de Carga. Una Fuente de Voltaje ideal tieneuna Regulación de Carga igual a cero.
13.2.4 Regulación de Línea
La Regulación de Línea es una medida de la capacidad de laFuente de Voltaje DC de mantener constante su voltaje de salidacuando varía el valor del voltaje AC máximo aplicado a la entrada delrectificador. Se define utilizando la siguiente expresión:
Al igual que el Voltaje de Rizado, el Factor de Rizado se especificapara la máxima carga que puede manejar la Fuente de Voltaje DC.
215
RL = VoVimax - V oVimin
VoVimin x 100% (13.4)
Donde:
VoVimax = Voltaje de salida cuando el voltaje AC pico a la entrada es máximo
VoVimin = Voltaje de salida cuando el voltaje AC pico a la entrada es mínimo
Cuanto mejor es la calidad del regulador de la Fuente de VoltajeDC , menor es la Regulación de Línea. Una Fuente de Voltaje ideal tieneuna Regulación de Línea igual a cero.
13.3 EL TRANSFORMADOR
Como mencionamos anteriormente, el transformador aísla laFuente del sistema AC y ajusta el valor pico del voltaje al valordeseado, de acuerdo con los requerimientos de entrada de la Fuente deVoltaje.
A fin de determinar el transformador adecuado para una Fuentede Voltaje en particular, además de indicar la relación detransformación dada por el cociente entre el voltaje en el primario y elsecundario, es necesario especificar la potencia aparente (volts-amperes) que va a manejar dicho transformador. Para determinardicha potencia se multiplica el valor r.m.s. del voltaje en el secundariopor el valor r.m.s. de la corriente en el secundario. Suponiendo que laspérdidas propias del transformador son despreciables, el valorcalculado en el secundario es igual a la potencia que maneja el primariodel transformador.
El cálculo del valor r.m.s. del voltaje en el secundario deltransformador es simple y directo, ya que consideramos que la formade onda del voltaje es sinusoidal (sin tomar en cuenta el efecto delruido eléctrico existente en la línea), pero es necesario calcularcuidadosamente el valor r.m.s. de la corriente en el secundario, ya quedebido a la operación del circuito rectificador con filtro, la forma deonda de dicha corriente dista mucho de ser sinusoidal, como veremosen los próximos puntos.
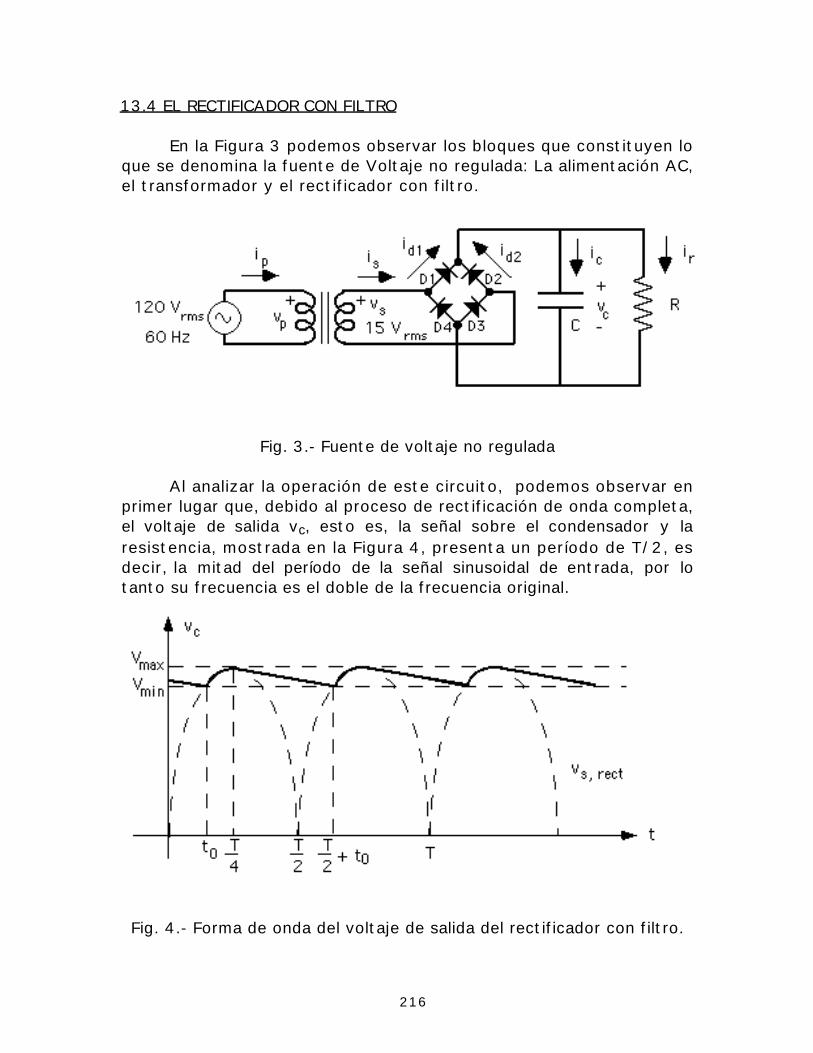
216
13.4 EL RECTIFICADOR CON FILTRO
En la Figura 3 podemos observar los bloques que constituyen loque se denomina la fuente de Voltaje no regulada: La alimentación AC,el transformador y el rectificador con filtro.
Fig. 3.- Fuente de voltaje no regulada
Al analizar la operación de este circuito, podemos observar enprimer lugar que, debido al proceso de rectificación de onda completa,el voltaje de salida vc, esto es, la señal sobre el condensador y laresistencia, mostrada en la Figura 4, presenta un período de T/2, esdecir, la mitad del período de la señal sinusoidal de entrada, por lotanto su frecuencia es el doble de la frecuencia original.
Fig. 4.- Forma de onda del voltaje de salida del rectificador con filtro.
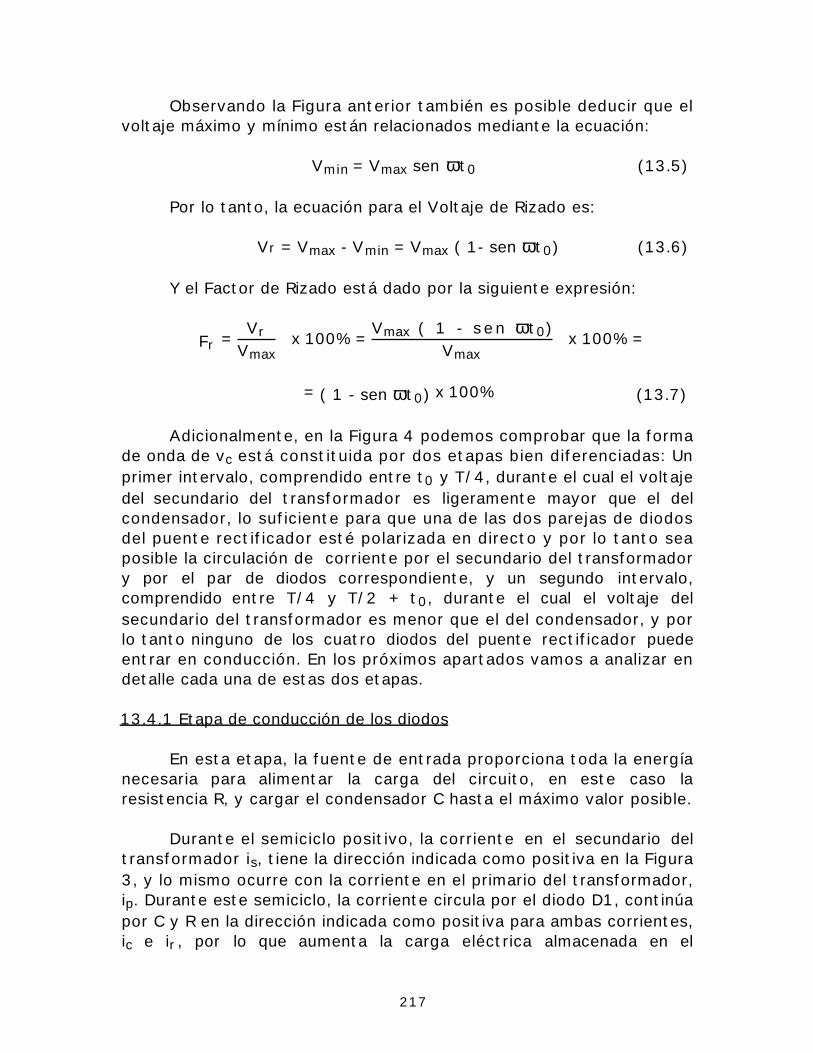
217
Observando la Figura anterior también es posible deducir que elvoltaje máximo y mínimo están relacionados mediante la ecuación:
Vmin = Vmax sen ωt0 (13.5)
Por lo tanto, la ecuación para el Voltaje de Rizado es:
Vr = Vmax - Vmin = Vmax ( 1- sen ωt0) (13.6)
Y el Factor de Rizado está dado por la siguiente expresión:
Fr = Vr
Vmax x 100% =
Vmax ( 1 - s en ωt0)Vmax
x 100% =
= ( 1 - sen ωt0) x 100% (13.7)
Adicionalmente, en la Figura 4 podemos comprobar que la formade onda de vc está constituida por dos etapas bien diferenciadas: Unprimer intervalo, comprendido entre t0 y T/4, durante el cual el voltajedel secundario del transformador es ligeramente mayor que el delcondensador, lo suficiente para que una de las dos parejas de diodosdel puente rectificador esté polarizada en directo y por lo tanto seaposible la circulación de corriente por el secundario del transformadory por el par de diodos correspondiente, y un segundo intervalo,comprendido entre T/4 y T/2 + t0, durante el cual el voltaje delsecundario del transformador es menor que el del condensador, y porlo tanto ninguno de los cuatro diodos del puente rectificador puedeentrar en conducción. En los próximos apartados vamos a analizar endetalle cada una de estas dos etapas.
13.4.1 Etapa de conducción de los diodos
En esta etapa, la fuente de entrada proporciona toda la energíanecesaria para alimentar la carga del circuito, en este caso laresistencia R, y cargar el condensador C hasta el máximo valor posible.
Durante el semiciclo positivo, la corriente en el secundario deltransformador is, tiene la dirección indicada como positiva en la Figura3, y lo mismo ocurre con la corriente en el primario del transformador,ip. Durante este semiciclo, la corriente circula por el diodo D1, continúapor C y R en la dirección indicada como positiva para ambas corrientes,ic e ir , por lo que aumenta la carga eléctrica almacenada en el
218
condensador y le suministra a la resistencia la corriente necesaria,sigue por D3 y por el secundario del transformador para cerrar ellazo de corriente.
Durante el semiciclo negativo, la corriente is circula por elsecundario en la dirección opuesta, pasa por D2, luego por C y R en lamisma dirección que en el semiciclo positivo (con lo cual se obtiene elefecto de rectificación de onda completa, se aumenta igualmente lacarga eléctrica almacenada en el condensador y se le suministra a laresistencia la corriente necesaria), sigue por D4 y por el secundariodel transformador para cerrar el lazo de corriente.
De acuerdo con la ecuación para los condensadores, la corrienteen el condensador está dada por la relación:
ic = C dvdt
(13.8)
Ahora bien, para este caso, si consideramos que tanto eltransformador como los diodos del puente rectificador tienen uncomportamiento similar al de los dispositivos ideales, el voltaje en elcondensador es igual al voltaje en el secundario del transformador, porlo tanto:
vc = Vmax sen ωt (13.9)
En consecuencia, la corriente en el condensador está dada por larelación:
ic = C ω Vmax cos ωt (13.10)
Y la corriente tanto en los diodos que están conduciendo como enel secundario del transformador es:
is = C ω Vmax cos ωt + ir (13.11)
Para simplificar, vamos a considerar que las variaciones en lacorriente que circula por la resistencia R, debidas a las variaciones delvoltaje en el condensador, son despreciables frente a las variacionesque sufre la corriente en el condensador, por lo tanto podemossuponer que la corriente por la resistencia R permanece esencialmente
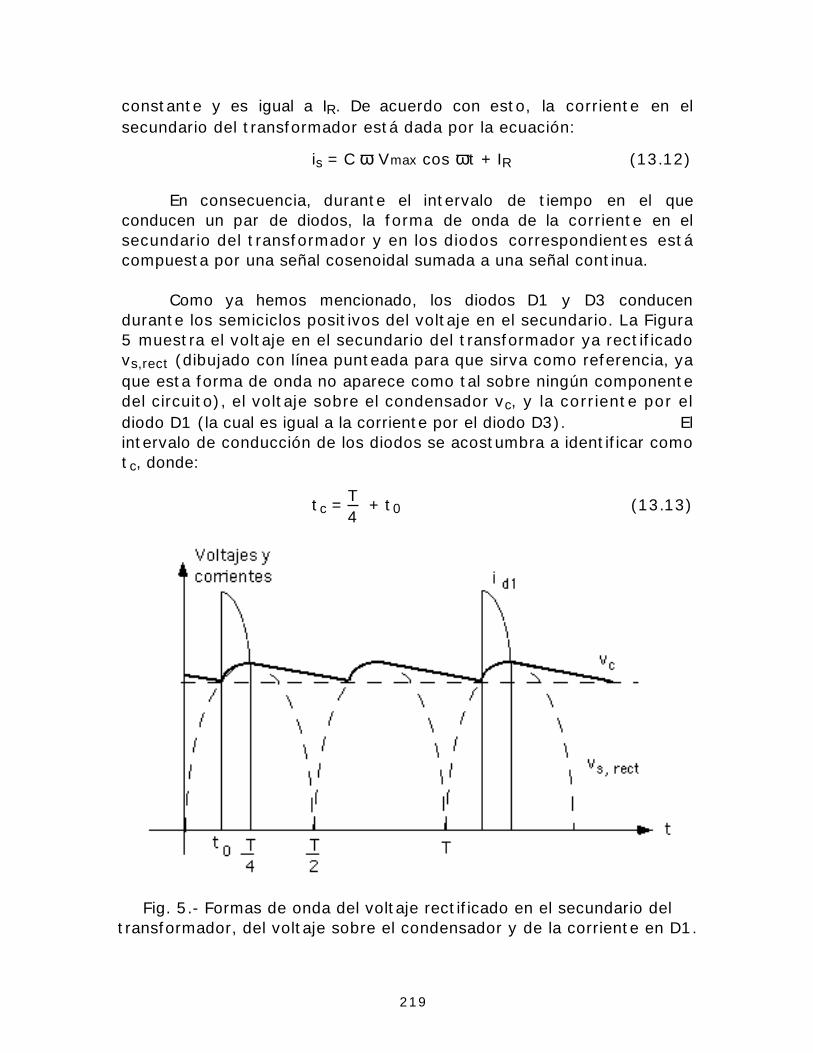
219
constante y es igual a IR. De acuerdo con esto, la corriente en elsecundario del transformador está dada por la ecuación:
is = C ω Vmax cos ωt + IR (13.12)
En consecuencia, durante el intervalo de tiempo en el queconducen un par de diodos, la forma de onda de la corriente en elsecundario del transformador y en los diodos correspondientes estácompuesta por una señal cosenoidal sumada a una señal continua.
Como ya hemos mencionado, los diodos D1 y D3 conducendurante los semiciclos positivos del voltaje en el secundario. La Figura5 muestra el voltaje en el secundario del transformador ya rectificadovs,rect (dibujado con línea punteada para que sirva como referencia, yaque esta forma de onda no aparece como tal sobre ningún componentedel circuito), el voltaje sobre el condensador vc, y la corriente por eldiodo D1 (la cual es igual a la corriente por el diodo D3). Elintervalo de conducción de los diodos se acostumbra a identificar comotc, donde:
tc = T4 + t0 (13.13)
Fig. 5.- Formas de onda del voltaje rectificado en el secundario deltransformador, del voltaje sobre el condensador y de la corriente en D1.
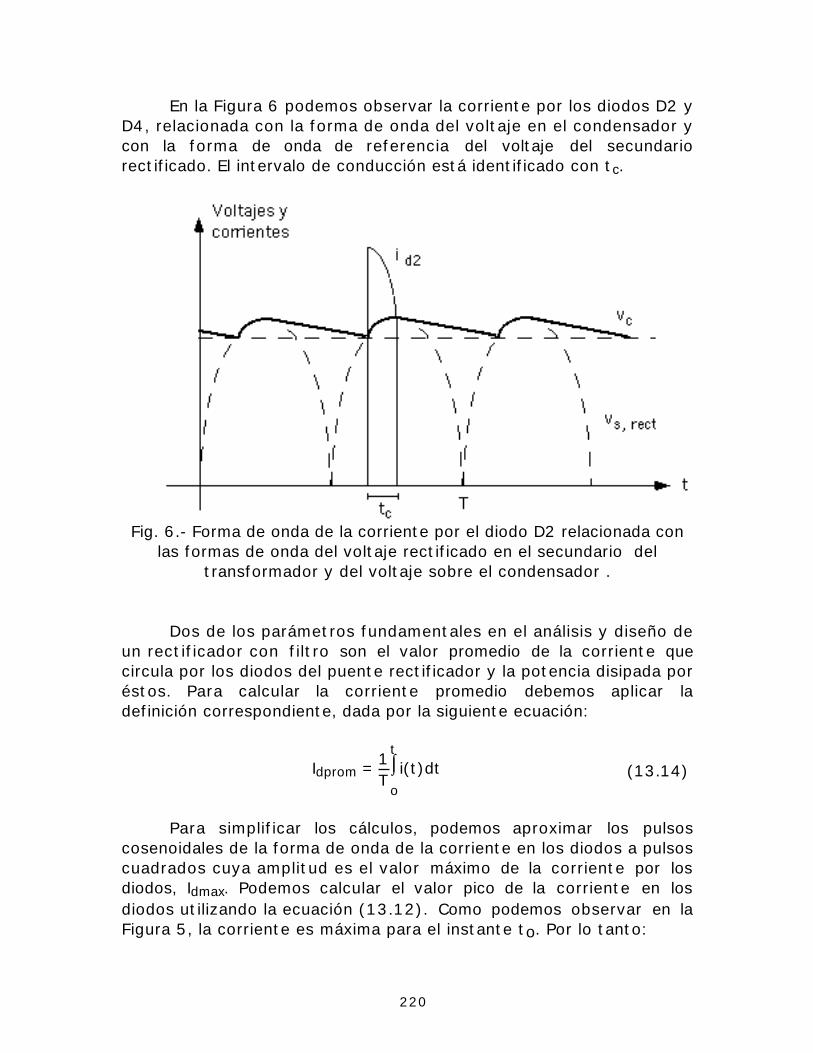
220
En la Figura 6 podemos observar la corriente por los diodos D2 yD4, relacionada con la forma de onda del voltaje en el condensador ycon la forma de onda de referencia del voltaje del secundariorectificado. El intervalo de conducción está identificado con tc.
Fig. 6.- Forma de onda de la corriente por el diodo D2 relacionada conlas formas de onda del voltaje rectificado en el secundario del
transformador y del voltaje sobre el condensador .
Dos de los parámetros fundamentales en el análisis y diseño deun rectificador con filtro son el valor promedio de la corriente quecircula por los diodos del puente rectificador y la potencia disipada poréstos. Para calcular la corriente promedio debemos aplicar ladefinición correspondiente, dada por la siguiente ecuación:
Idprom = 1T
⌡⌠
o
ti(t)dt (13.14)
Para simplificar los cálculos, podemos aproximar los pulsoscosenoidales de la forma de onda de la corriente en los diodos a pulsoscuadrados cuya amplitud es el valor máximo de la corriente por losdiodos, Idmax. Podemos calcular el valor pico de la corriente en losdiodos utilizando la ecuación (13.12). Como podemos observar en laFigura 5, la corriente es máxima para el instante to. Por lo tanto:
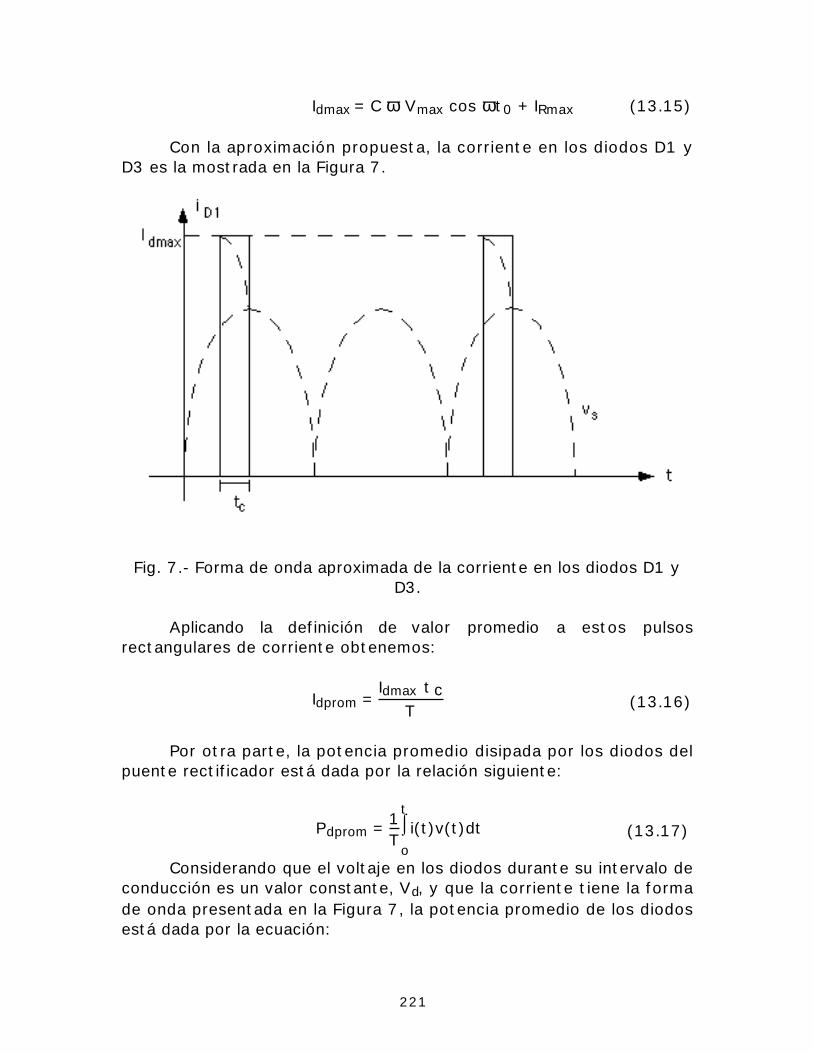
221
Idmax = C ω Vmax cos ωt0 + IRmax (13.15)
Con la aproximación propuesta, la corriente en los diodos D1 yD3 es la mostrada en la Figura 7.
Fig. 7.- Forma de onda aproximada de la corriente en los diodos D1 yD3.
Aplicando la definición de valor promedio a estos pulsosrectangulares de corriente obtenemos:
Idprom = Idmax t c
T (13.16)
Por otra parte, la potencia promedio disipada por los diodos delpuente rectificador está dada por la relación siguiente:
Pdprom = 1T
⌡⌠
o
ti(t)v(t)dt (13.17)
Considerando que el voltaje en los diodos durante su intervalo deconducción es un valor constante, Vd, y que la corriente tiene la formade onda presentada en la Figura 7, la potencia promedio de los diodosestá dada por la ecuación:
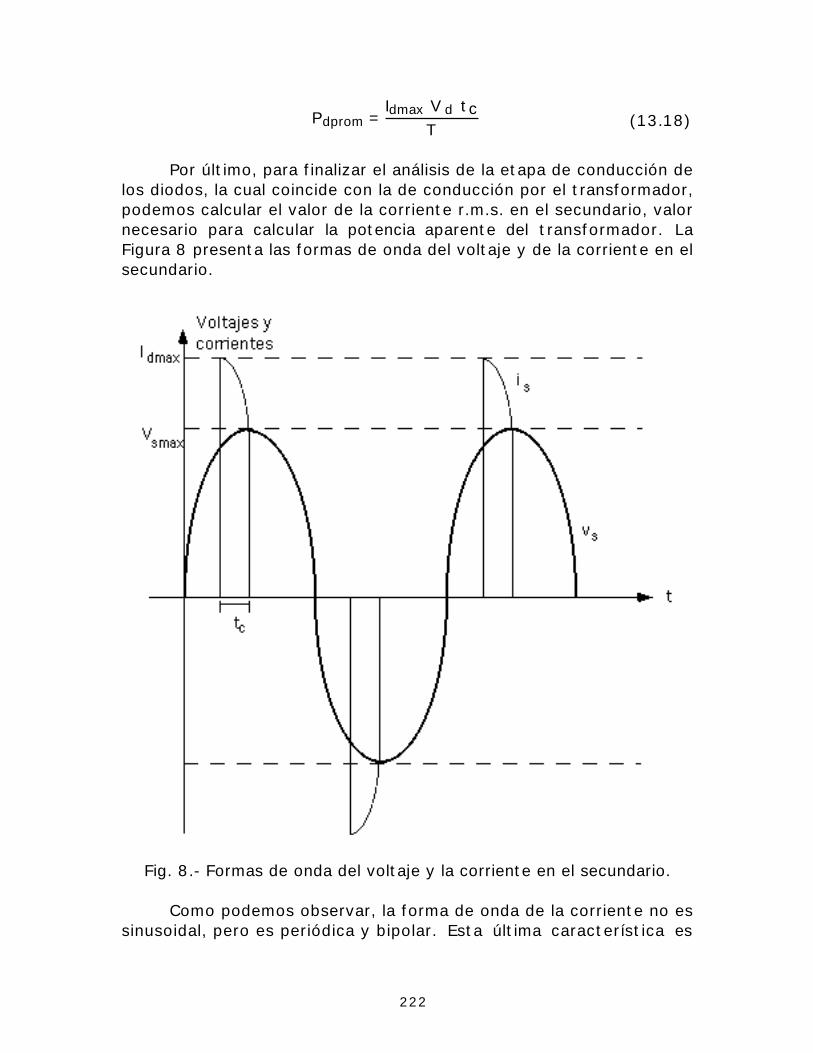
222
Pdprom = Idmax V d tc
T (13.18)
Por último, para finalizar el análisis de la etapa de conducción delos diodos, la cual coincide con la de conducción por el transformador,podemos calcular el valor de la corriente r.m.s. en el secundario, valornecesario para calcular la potencia aparente del transformador. LaFigura 8 presenta las formas de onda del voltaje y de la corriente en elsecundario.
Fig. 8.- Formas de onda del voltaje y la corriente en el secundario.
Como podemos observar, la forma de onda de la corriente no essinusoidal, pero es periódica y bipolar. Esta última característica es
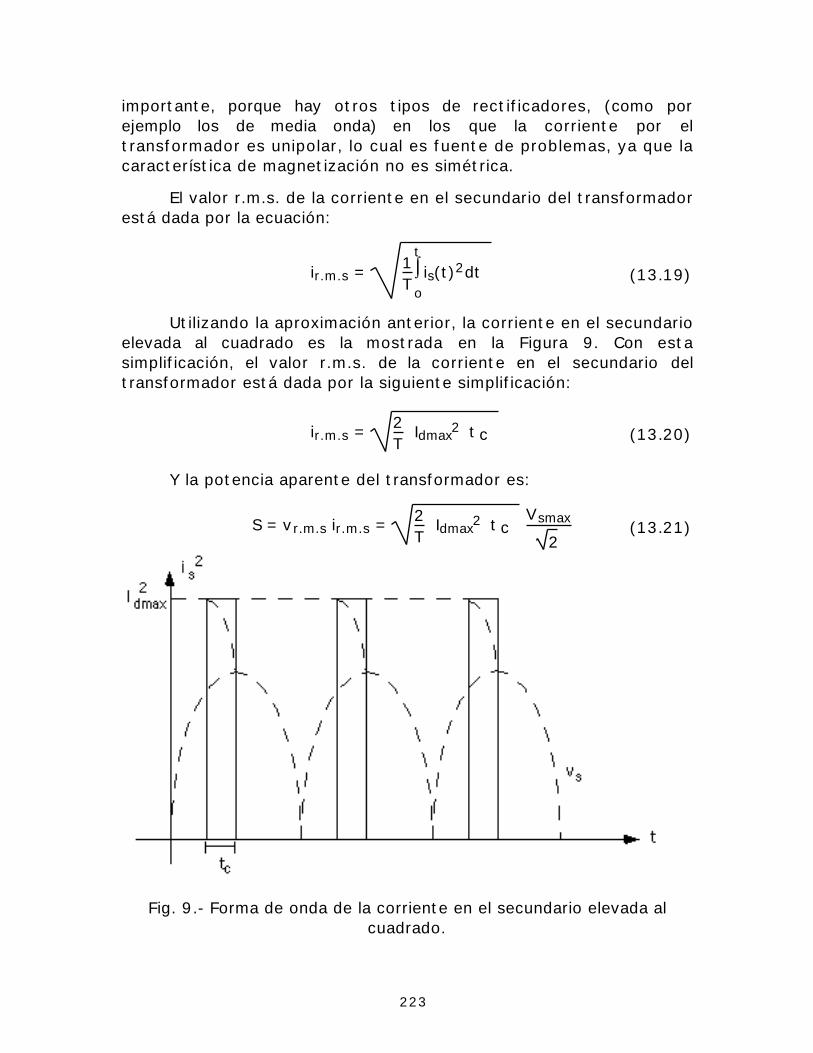
223
importante, porque hay otros tipos de rectificadores, (como porejemplo los de media onda) en los que la corriente por eltransformador es unipolar, lo cual es fuente de problemas, ya que lacaracterística de magnetización no es simétrica.
El valor r.m.s. de la corriente en el secundario del transformadorestá dada por la ecuación:
ir.m.s = 1T
⌡⌠
o
t
is(t)2dt (13.19)
Utilizando la aproximación anterior, la corriente en el secundarioelevada al cuadrado es la mostrada en la Figura 9. Con estasimplificación, el valor r.m.s. de la corriente en el secundario deltransformador está dada por la siguiente simplificación:
ir.m.s = 2T Idmax2 t c (13.20)
Y la potencia aparente del transformador es:
S = vr.m.s ir.m.s = 2T Idmax2 t c
Vsmax
2 (13.21)
Fig. 9.- Forma de onda de la corriente en el secundario elevada alcuadrado.
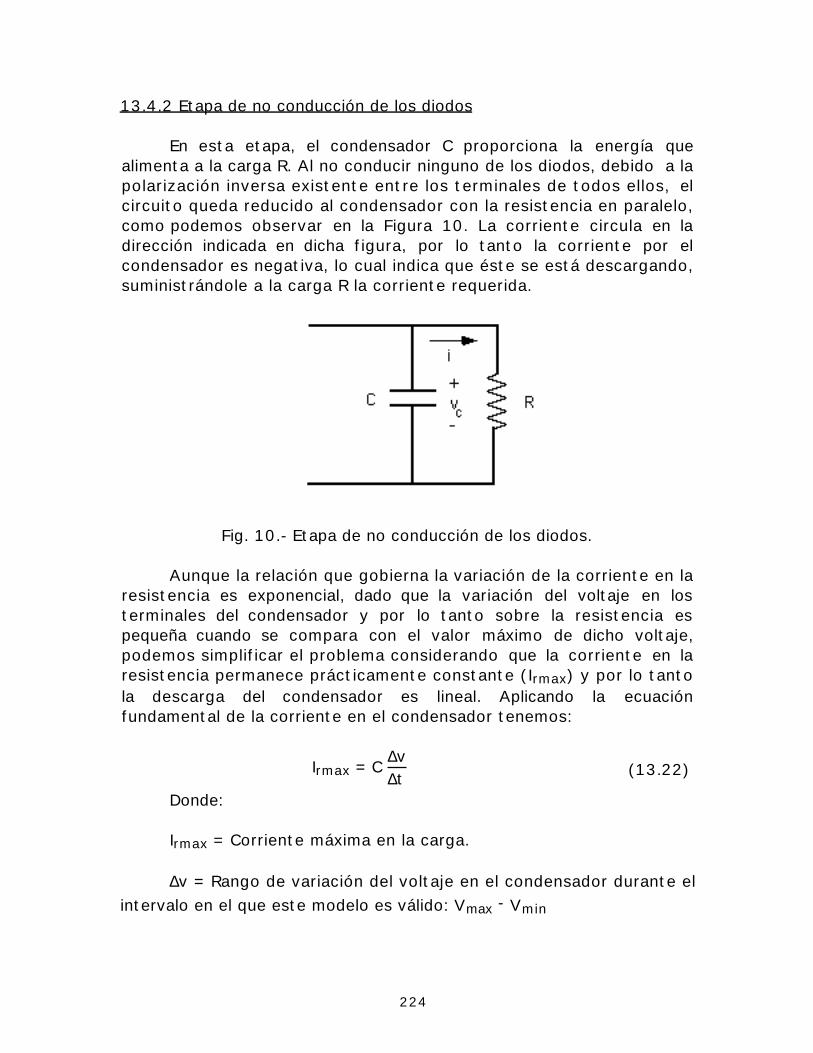
224
13.4.2 Etapa de no conducción de los diodos
En esta etapa, el condensador C proporciona la energía quealimenta a la carga R. Al no conducir ninguno de los diodos, debido a lapolarización inversa existente entre los terminales de todos ellos, elcircuito queda reducido al condensador con la resistencia en paralelo,como podemos observar en la Figura 10. La corriente circula en ladirección indicada en dicha figura, por lo tanto la corriente por elcondensador es negativa, lo cual indica que éste se está descargando,suministrándole a la carga R la corriente requerida.
Fig. 10.- Etapa de no conducción de los diodos.
Aunque la relación que gobierna la variación de la corriente en laresistencia es exponencial, dado que la variación del voltaje en losterminales del condensador y por lo tanto sobre la resistencia espequeña cuando se compara con el valor máximo de dicho voltaje,podemos simplificar el problema considerando que la corriente en laresistencia permanece prácticamente constante (Irmax) y por lo tantola descarga del condensador es lineal. Aplicando la ecuaciónfundamental de la corriente en el condensador tenemos:
Irmax = C ∆v∆t
(13.22)
Donde:
Irmax = Corriente máxima en la carga.
∆v = Rango de variación del voltaje en el condensador durante elintervalo en el que este modelo es válido: Vmax - Vmin

225
∆t = Intervalo de tiempo durante el cual este modelo es válido: DeT/4 a T/2 + t0.
Por lo tanto:
∆t = T2 + t0 -
T4
= T4 + t0 (13.23)
Sustituyendo estos valores en la ecuación (13.21) obtenemos:
Irmax = C Vmax - Vmin
T4 + t 0
= C Vmax ( 1 - s en ωt0)
T4 + t 0
(13.24)
De donde:
T4 + t0 = C
VmaxIrmax
( 1 - sen ωt0) (13.25)
Esta es la ecuación que relaciona el tiempo t0, correspondiente alinstante donde se alcanza el voltaje mínimo, con el valor delcondensador, el voltaje máximo y la corriente máxima en la carga.Como podemos observar, es una ecuación trascendental, debido a lafunción seno presente en uno de sus términos.