yaskawa manuals 212
TRANSCRIPT
7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 1/31
Page 1 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Contents
Page
1. Introduction.............................................................................................2
2. Winding Change Application .................................................................2
2.1 Winding Change Methods ................................................................2.2 Winding Selection Magnetic Contactor............................................
2.3 Magnetic Contactor Answer-back Failure Detection .......................
3. Parameters.................................................................................................
3.1 Parameter Modification for MC5 .....................................................
3.2 Parameter Set-up and Adjustment ....................................................
4. Auto Tuning and Motor Parameter Adjustment .......................................
4.1 Procedure ..........................................................................................
5. Troubleshooting........................................................................................
Appendix A: Application Examples..............................................................
Appendix B: Parameter Modification List from G5 to MC5.........................
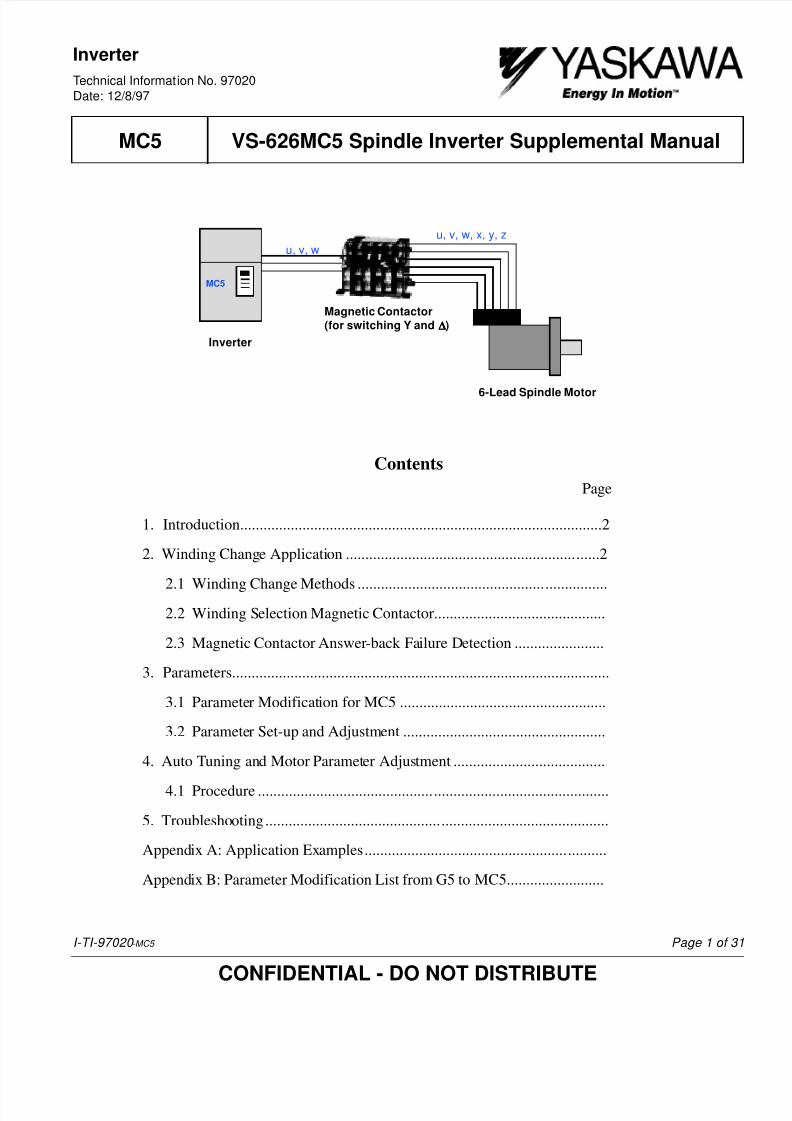
MC5
u, v, w
u, v, w, x, y, z
Inverter
6-Lead Spindle Motor
Magnetic Contactor
(for switching Y and ∆∆∆∆)

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 2/31
Page 2 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
1. Introduction
The Yaskawa Varispeed-626MC5 inverter, a derivative of VS-616G series, is a compact and versatilespindle drive specially designed for machine tool application. The features of the MC5 inverter include
• Winding change “on-the-fly” for the wide constant power range operation• Auto-tune for dual winding motors
This supplemental manual is intended to be used with the Varispeed-616G5 Instruction Manual (TOE-S616-10) and Varispeed-616G5 Descriptive Manual For Constants (TOEZ-S616-10).
2. Winding Change Application
A six-lead three-phase AC induction motor can be connected in two different ways, namely Y- and ∆-windings (Figure 2.1). The base frequency of the Y-winding is lower than that of ∆-winding, providinghigher torque at low speed.
Y-Winding (Y-Connection)
Low Speed, High Torque
∆∆∆∆-Winding (∆∆∆∆-Connection)
High Speed, Low Torque
X Y Z
U V W
U
V W
X-Y-Z
U
V
WX
Y
Z
6 Lead Motor Winding
Figure 2.1 Y and ∆ Windings

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 3/31
Page 3 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
In contrast, the maximum speed of the ∆-winding is much higher than that of Y-winding (Figure 2.2).
By switching between the two winding connections, a wide constant power range can be obtained (Fig-ure 2.3), beneficial for driving the spindle of a lathe or a milling machine. This type of application is
called the “Y/ ∆ winding change,” or simply “winding change.”
Figure 2.2
Y-Winding
provides high
torque at thelow speed.
∆-Winding covers
the high speedrange.
00
Power
Y-base
00 ∆∆∆∆-base
Power
Y-max.
∆∆∆∆-max.
Freq.
Freq.
Y-Winding
∆∆∆∆-Winding
winding changedone in this area
Figure 2.2 Performance Curves of Y and ∆ Windings
Winding change technology provides high torque and wideconstant power range with a relatively small size inverter.
0
∆-WindingY-Winding
Wide Constant Power Range:
A : B = up to 1:12 !!
Power
MotorSpeed
A BY-baseSpeed
∆∆∆∆-max.speed
0
hightorque atlow speed
Figure 2.3 Winding Change Application Performance Curve

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 4/31
Page 4 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
The VS626MC5 has two separate sets of motor parameter settings (motor 1 parameters [E1, E2] and mo-tor 2 parameters [E3, E4, and E5]). For the winding change application, the motor parameters and theV/f patterns are individually set for the two windings. The VS626MC5 is similar to a two-motor appli-cation, except that the winding change control is performed “on-the-fly,” i.e., during operation. A magnetic contactor is used to switch between the two windings. (The magnetic contactor must have transfercontacts that can be directly driven by the inverter.)
Note: Although the MC5 can perform a winding changeover during cutting, this function is not support-ed by Yaskawa. Cutting performance cannot be guaranteed due to reliance on factors outside of Yaska-wa’s control, such as load inertia.
2.1 Winding Change Methods
The MC5 drive offers two different methods for winding change, internal winding change and ex-ternal winding change, namely.
External Winding Change Method
In this method, an external signal is given to one of the multi-function inputs (set as “80”H) totrigger the winding changeover. Figure 2.4 illustrates a wiring example of this application (inthis case, the external signal is given from the CNC). Figure 2.5 on the next page illustrates thesequence of changing motor parameter for this method.
RST
78
11
Change Winding
Common
CNC
3φ
230V
UVW
MC5
9
10
MC Ansback
0V +24V
+24VDCSupply
1φ 230V
17 18
246
13
14
15
16
X
179
11
HV-75AP3Magnetic Contactor
U Z
Dual WindingMotor
X V YW
Figure 2.4 Sample Wiring for External Winding Change
(Open Loop Vector Mode)
B1-02 = 4H1-05 = 80HH1-06 = 82HH2-01 = 41HA1-02 = 2E3-01 = 2

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 5/31
Page 5 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Fout
RUN Command
Total base block time
Durin s eed search
Motor 1 Motor 2
Minimum baseblock time
L2-03
2nd motor
parameter
calculation time
Hz
0
V
Output Voltage
50%
0%
Torque Limit
64msec
Voltage recovery time
L2-04
The ramp time is
dependent on the
accel timesettin .
SpdSrch Dec Time
b3-03
Note) When the closed loop vector control mode is selected, the torque reference increases from zero with
64msec instead of 50% of torque limit for the open loop vector mode.
Figure 2.5 External Winding Change Sequence

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 6/31
Page 6 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
To use this method, the user must set “80”H to the multi-functional digital input which is intend-ed to receive the winding changeover signal. This setting enables the drive to select Motor 1 pa-rameters (E1 and E2) when the input is open and Motor 2 parameters (E4 and E5) when the inputis closed. Note that when this method is used, the internal winding change parameters (P1-01and P1-02) are ignored.
Internal Winding Change Method
In this method, no external signal is used for triggering the winding change. Instead, thechangeover and the selection of the Motor 1 or Motor 2 parameters are determined internally bythe preset parameters, such as changeover frequency level (P1-01) and frequency width (P1-02).Figure 2.6 illustrates this example. Do not set “80”H to the multi-function digital input when the
internal winding change is used.
In both the external and internal methods, the multi-function digital output terminal which is con-nected to the magnetic contactor must be set to either “1C”H or “41”H, depending on the type ofcontactor. This setting allows the drive to give a signal to the magnetic contactor to close/openthe contact for Y/ ∆ switching.
RST
811
3φ230V
UVW
MC5
26
0V +24V
+24VDCSupply
1φ 230V
17 18
246
13
14
15
16
X
179
11
HV-75AP3Magnetic Contactor
U Z
Dual WindingMotor
XV Y
W
Figure 2.6 Sample Wiring for Internal Winding Change(Flux Vector Mode)
B1-02 = 4H1-06 = 82HH1-03 = 41HP1-04 = 1
A1-02 = 3E3-01 = 3
27 PG-X2
Card(Option)
x PG

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 7/31
Page 7 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
2.2 Winding Selection Magnetic Contactor
In regard to the winding change application with the MC5 drive, use of a Yaskawa magnetic con-tactor is recommended (Table 2.1, Figure 2.8). The contactor is specially designed for motorwinding selection control and motor switch operation. The inverter directly controls the contac-tor switching function.
Table 2.1
Model Number HV-75AP3 HV-150AP3
Contact Arrangement Main Contact: 3NO3NC, Auxiliary Contact: 1NO
Rated Isolation Voltage 600V
Rated Energizing Current 75A (Continuous)87A (30 min. 33% ED)*
150A (Continuous)175A (30 min. 33% ED)*
Max. Breaking Current 200 A 400 A
Max. Operation Frequency(Switching Duty)
600 times/hour
Mechanical Life 5,000,000 times
Ratings of Applicable Magnetic
Coils
200V 50/60 Hz, 220V 50/60 Hz, 230V 60 Hz
Ambient Temperature -10 to +55 °C (14 to 131 °F)
Humidity 10 to 95% RH (non-condensing)
Approximate Mass 2.5 kg 5.0 kg
Dimensions (H x W x D, mm) 115 x 160 x 93 164 x 192 x 107

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 8/31
Page 8 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
The Yaskawa magnetic contactor requires a single phase 230V power supply and +24VDC forswitching signal. The +24VDC must be supplied by the user.
Status of Operation
Selective Signal Main Contacts Auxiliary Contacts Connection
13-14 1-2 3-4 5-6 7-8 9-10 11-12 15-16
+24V OPEN CLOSE OPEN Y
0V CLOSE OPEN CLOSE ∆
Figure 2.8 Yaskawa Magnetic Contactor for Winding Selection
Dimensions in mm

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 9/31
Page 9 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
2.3 Magnetic Contactor Answer-back Failure Detection
Magnetic contactors commonly have an answer-back signal to feedback when the connectionchange is accomplished. The MC5 drive includes an option to check this signal and give an alarmin the event of a magnetic contactor failure.
When the multi-function digital input is set to “81” or “82” (MC Ansback Input), the digital inputterminal functions as the MC answer-back signal from the Y/ ∆ switching magnetic contactor.The answer-back fault is detected when one of the following two cases occur (Figure 2.9):
Case 1) The motor parameter switching command is given and the auxiliary contact of Y/ ∆magnetic contactor does not change the state within the specified time limit (P1-05)
Case 2) The magnetic contactor changes the state without issuing the triggering signal.
When the m otor parameter switching comm and is given and the auxiliary contact of Y/ ∆ magnetic
contactor doesn’t chang e the state within P1-03 time , the inverter will detect MC An swerback failure.
P1-03 P1-03
MC A nsback Fault
M otor 1 M otor 2 M otor 1
M C Ansback off M C Ansback on M C Ansback off
DC 24V
P1-03MC A nsback Fault
Motor 1
M C Ansback off M C Ansback on
CASE 2
Wye connection
Delta connection
11
Multi-
function
In ut
VS-626MC5
9
10
MC Ansback N.C.
or
MC Ansback N.O.
Multi-digital
output
Motor 2 Selected
CASE 1
∆ Connection
Y Connection
When the motor parameter switching command is given and the auxiliary contact of Y/ ∆ magneticcontactor does not change the state within P1-03 time, the inverter detects MC Answerback failure.
Figure 2.9 Magnetic Contactor Answer-Back Failure Detection

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 10/31
Page 10 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Although use of the magnetic contactor answer-back failure detection is optional, Yaskawa rec-ommends using this feature to protect the motor and/or inverter in the event of contactor failure.
When a Yaskawa magnetic contactor (HV-75AP3 or HV-150AP3) is used, the setting should be“82.”
3. Parameters
3.1 Parameter Modification for MC5
The VS-626MC5 software (VSG105421) is a modification of the VS-626G5 software
(VSG101042). Modification includes addition of new winding change parameters and settings,and elimination of some parameters. (Refer to Appendix A.) Tables 3.1, 3.2 and 3.4 describethe modification in detail, whereas Table 3.3 describes the pre-existing parameters which affectthe winding changeover performance.
Table 3.1 New Parameters in the MC5
Parameter # Name Description Unit Setting Range Default
E3-XX,E4-XX,E5-XX
Motor 2 Parameters Refer to Table 3.3
P1-01 Changeover Frequency Winding change-over frequencyfrom Y (low speed) winding to ∆ (high speed) winding
0.1Hz 0.0 ~ 400.0Hz 0.0Hz
P1-02 Frequency Width Hysterisis for change-over fre-quency. Change-over frequencyfrom ∆ to Y = P1-01 - P2-02
0.1Hz 0.0 ~ 20.0Hz 5.0Hz
P1-03 Ansback Det Time Detection delay time setting forthe magnetic contactor answer-back signal at winding change
0.01 sec 0.20 ~ 1.00 sec 0.20 sec
P1-04 Y-Winding Sel Selection of motor parameter sets(motor 1 or motor 2) for Y-wind-
ing
— 0: Motor 1 for Y1: Motor 2 for Y
1
P1-05 ProgramMode@ Run Enable or disable MENU and ESCkeys during operation
— 0: Disabled1: Enabled
1

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 11/31
Page 11 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Table 3.2 Parameters with Additional (New) Settings
Parameter Additional (new) Setting Description/Remarks
B1-02(Run Source)
4: ∆ /Y Seq. Must be selected for winding change application
L8-01(DB ResistorProtection)
1: 10% ED during RUN2: 3% ED3: 10% ED
When options 2 or 3 are selected, the braking transis-tor is always turned on when the DC bus voltage ex-ceeds the preset level, except during a fault condition.
H1-01 ~ H1~06(Multi functiondigital input)
80: Y/ ∆ ChangeOpen: Motor 1 parameters are usedClosed: Motor 2 parameters are used
Parameters P1-01 and P1-02 are disabled when 80His selected.
81: MC Ansback N.C.Open: No ansback when MC is openClosed: Ansback when MC is closed
To use the magnetic contactor answer-back signal forthe contactor fault detectionWhen Yaskawa HV-75AP or HV-150AP contactorsare used, the setting is 82 (MC. Ansback N.O.)
82: MC Ansback N.O.Open: No ansback when MC is closedClosed: Ansback when MC is open
H2~01~H2-03(Multi functiondigital output)
40: Zero Speed 2Closed: Zero speed condition except dur-ing D/Y changeover
Setting this avoids the Zero Speed signal output dur-ing winding changeover
1C: Close Motor 2 SelOpen: Motor 1 is selectedClose: Motor 2 is selected
External winding changeover signal selection.If “1C” is set, when the motor 1 parameters are se-lected, the signal is open. When the motor 2 param-eters are selected, the signal is closed. If “41” is set,the effect is the opposite of “1C” setting.41: Open Motor 2 Sel
Open: Motor 2 is selectedClose: Motor 1 is selected
Table 3.3 Other Parameters Which Affect Winding Changeover Performance
Parameter#
Name Description Unit Setting Range Default
B3-03 Speed search deceleration time
See Figure 2.5for detail
0.1 sec 0.0 ~ 10.0 sec 2.0 sec
L2-03 Minimum baseblock time (PwrL Baseblock t) 0.1 sec 0.0 ~ 5.0 sec Depends oninverter size
L2-04 Voltage recovery time (PwrL V/F Ramp t) 0.1 sec 0.0 ~ 2.0 sec 0.3 sec

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 12/31
Page 12 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Q: Quick start (A1-01 = 2) B: Basic (A1-01 = 3)
A: Advanced (A1-01 = 4) X: Setting/Reading disabled
Table 3.4 Motor Parameters
Motor 1Parameters
Motor 2Parameters
(new parameters)
Description Parameter Access(Motor 1)
Parameter Access(Motor 2 )
V/f V/f w/ PG
O L V F V V/f V/f w/ PG
O L V FV
A1-02 E3-01 Control method selection Q Q Q Q A A A A
E1-01 — Input voltage setting Q Q Q Q —
E1-02 — Motor selection Q Q Q Q —
E1-03 — V/f pattern selection Q Q X X —
E1-04 E4-01 Max. frequency Q Q Q Q A A A A
E1-05 E4-02 Max. voltage Q Q Q Q A A A A
E1-06 E4-03 Base frequency Q Q Q Q A A A A
E1-07 E4-04 Mid. frequency Q Q A A A A
E1-08 E4-05 Mid voltage Q Q A A A A
E1-09 E4-06 Start frequency Q Q Q A A A A A
E1-10 E4-07 Start voltage Q Q A A A A
E1-11 — Mid frequency (2) A A A A —
E1-12 — Mid voltage (2) A A A A —
E1-13 — Base voltage A A Q Q —E2-01 E5-01 Full load current at base
frequencyA Q Q Q A A A A
E2-02 E5-02 Full load slip at basefrequency
A A Q Q A A A A
E2-03 E5-03 No load current at basefrequency
A A Q Q A A A A
E2-04 E5-04 Number of poles X Q X Q X A X A
E2-05 E5-05 Line to line resistance A A A A A A A A
E2-06 E5-06 Leakage inductance X X A A X X A A
E2-07 — Saturation coefficient 1 X X A A —
E2-08 — Saturation coefficient 2 X X A A —
E2-09 — Mechanical loss X X X A —

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 13/31
Page 13 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
3.2 Parameter Set-up and Adjustment
Run Source (B1-02)
When using the MC5 inverter for the winding change application, this parameter must be set to“4” (Y/ ∆ seq.).
Speed Search Deceleration Time (B3-03)
This parameter determines the deceleration time during speed search after the windingchangeover. Reducing the value of this parameter results in a reduction of the overall changeovertime. However, an over voltage (OV) fault may occur if the setting is too small. Yaskawa rec-ommends using the default setting.
Control Mode of Motor 1 (A1-02) and Motor 2 (E3-01)
Select the control method used for each winding. The setting values are as follows:
0: V/f mode without PG
1: V/f mode with PG
2: Open loop vector mode (without PG)
3: Flux vector mode (with PG)
Set the same value to both A1-02 and E3-01.
Motor Parameters
Varispeed-626MC5 has two individual sets of motor parameters, namely motor 1 and motor 2parameters. They are as follows:
Motor 1 Parameters Motor 2 Parameters
A1-02 : Motor 1 Control Method E3-01 : Motor 2 Control Method
E1-XX : Motor 1 V/f Pattern E4-XX : Motor 2 V/f Pattern
E2-XX : Motor 1 Set up E5-XX : Motor 2 Set up
Parameters for each of the Y- and ∆-windings can be set individually as motor 1 and motor 2 pa-rameters for a winding change application. The setting ranges and default setting of motor 2 pa-rameters are identical to the corresponding motor 1 parameters. To set E1~E5, refer to Section4, “Auto-Tuning and Motor Parameter Adjustment”

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 14/31
Page 14 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Multi-Function Digital Input/Output (H1 and H2)
For the winding change application, the user must set the multi-function digital input and outputproperly. Table 3.3 shows the new (additional) settings for H1 and H2 parameters.
Minimum Base Block Time (L2-03)
This parameter determines the base block time during winding change. Reducing the setting willresult in the reduction of the overall winding changeover time. However, an overcurrent (OC)fault caused by back EMF may occur if the setting value is too small. Yaskawa recommends us-ing the default setting.
Voltage Recovery Time (L2-04)
This parameter determines the duration of the voltage recovery time after base block at the wind-ing changeover. A larger setting allows the inverter to “ramp” the voltage at recovery. However,an overcurrent (OC) fault may occur if the setting value is too small. Yaskawa recommends us-ing the default setting.
DB Resistor Protection (L8-01)
This is the breaking resistor protection rating selection, as illustrated in Table 3.5.
Note: When L8-01 is set to 2 or 3, this software allows braking resistor to be turned on any time after the busvoltage exceeds the level at which the braking transistor turns on, except during an inverter fault condition
Winding Change-Over Frequency (P1-01)
This parameter is responsible for the winding change-over frequency from Y (low speed) wind-ing to ∆ (high speed) winding when the automatic winding change is used. The P1-01 settingmust be smaller than the maximum frequency of the Y (low speed) winding.
Table 3.5 Braking Resistor Overheat Protection
L8-01 setting Display of setting Description
0 Not provided There is no braking resistor overheat protection.
1 10% ED during run The overheat protection for the 10% duty brakingresistor is provided when the inverter is running.
2 3% ED The overheat protection for the 3% duty (YASKA-WA internal resistor ) braking resistor is providedwhether or not the inverter is operating.
3 10% ED The overheat protection for the 10% duty brakingresistor is provided whether or not the inverter isoperating.

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 15/31
Page 15 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Winding Change-Over Hysterisis (P1-02)
This parameter determines the winding change-over hysterisis; that is, the change-over frequen-cy from ∆- (high speed) winding to Y- (low speed) winding when automatic winding change isP1-01 ~ P1-02. Yaskawa recommends setting P1-02 so that the value of P1-01 ~ P1-02 is abovethe base speed of the ∆ (high speed) winding.
MC (Magnetic Contactor) Answer-Back Error Detection Time (P1-03)
This parameter determines the waiting time for the MC answer-back error detection. The param-eter is used only when one of the multi-function digital inputs (H1-01 ~ H1-06) is set to “81” or“82”.
Motor Parameter Selection (P1-04)
This parameter determines which of the two sets of motor parameters are assigned to Y- and ∆-windings. The setting is as follows: (Note: The default setting is “0” [disabled].)
“0”: Motor 1 parameters (E1 and E2) are used for Y-winding, motor 2 parameters (E3,E4 and E5) are for ∆-winding.
“1”: Motor 2 parameters (E3, E4 and E5) are used for Y-winding, motor 1 parameters(E1 and E2) are for ∆-winding.
Yaskawa recommends using the setting “1” for the following reason. At ∆0 (high speed) wind-
ing, the motor’s maximum speed may be much higher than the base frequency (1:3 t 1:4 typical-ly). In such a case, no-load voltage at such high speed operation may be higher than that of thebase speed. This requires a different V/f pattern setting for the base and maximum speed. Onlythe Motor 1 parameters (E1 and E2) allow the setting of different base and maximum V/f.
Program Mode at RUN (P1-05)
This parameter enables or disables the MENU and ESC keys that normally allow the drive to gointo the program mode during operation. The default setting is “0” (disabled).
“0”: Disabled -The operator key stroke (MENU and ESC) to enter the program modeis disabled.
“1”: Enabled - The MENU and ESC keys are enabled to use any time.
When “1” is selected, the user can enter the program mode by pressing the MENU or ESC key.If the winding changeover is attempted while the inverter is in the program mode, the motor willcoast to a stop. Setting P1-05 = “0” prevents this from occurring, but the user cannot go into theprogram mode during run.

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 16/31
Page 16 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
4. Auto Tuning and Motor Parameter Adjustment
Motor parameters for both Y- and ∆-windings need to be set correctly for the optimum performance ofthe motor. This is especially vital for the vector control modes (either open loop vector mode [withoutPG] or flux vector mode [with PG]).
The VS626MC5 drive has a built-in “auto-tune” feature for the vector modes (open loop vector and fluxvector) to help the user set the motor parameters correctly for the optimum performance of the motor anddrive in combination.
4.1 Tune-up Procedure
The following describes the step-by-step procedures for auto-tuning and adjusting the motor pa-rameters
Step 1) Obtain motor data
Obtain the following data from the motor used (required to start auto-tuning and to set the propermotor data):
1. Voltage level of AC power supply
2. Number of motor poles
3. The following data for both windings (Y and ∆)
a. Frequency at design base speed
b. No-load voltage at base speed
c. Full load current at base speed
d. Full load base speed in rpm or full load slip frequency
e. Maximum frequency
f. No load voltage at maximum speed (if different from 4)
g. Leakage inductance (if available)
Step 2) Selection of Inverter
Select an inverter according to the motor’s full load current. The inverter’s rated current (A)must be equal or larger than the motor’s full load current (A). Note that high speed spindle motors are commonly high current, low voltage type, and in such a case, it may be necessary to sizeup the inverter to match the motor current.
Step 3) Wiring
Wire the inverter, motor, magnetic contactor, 24VDC power supply, and encoder. (See figures2.4 and 2.6 for examples.)
7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 17/31
Page 17 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
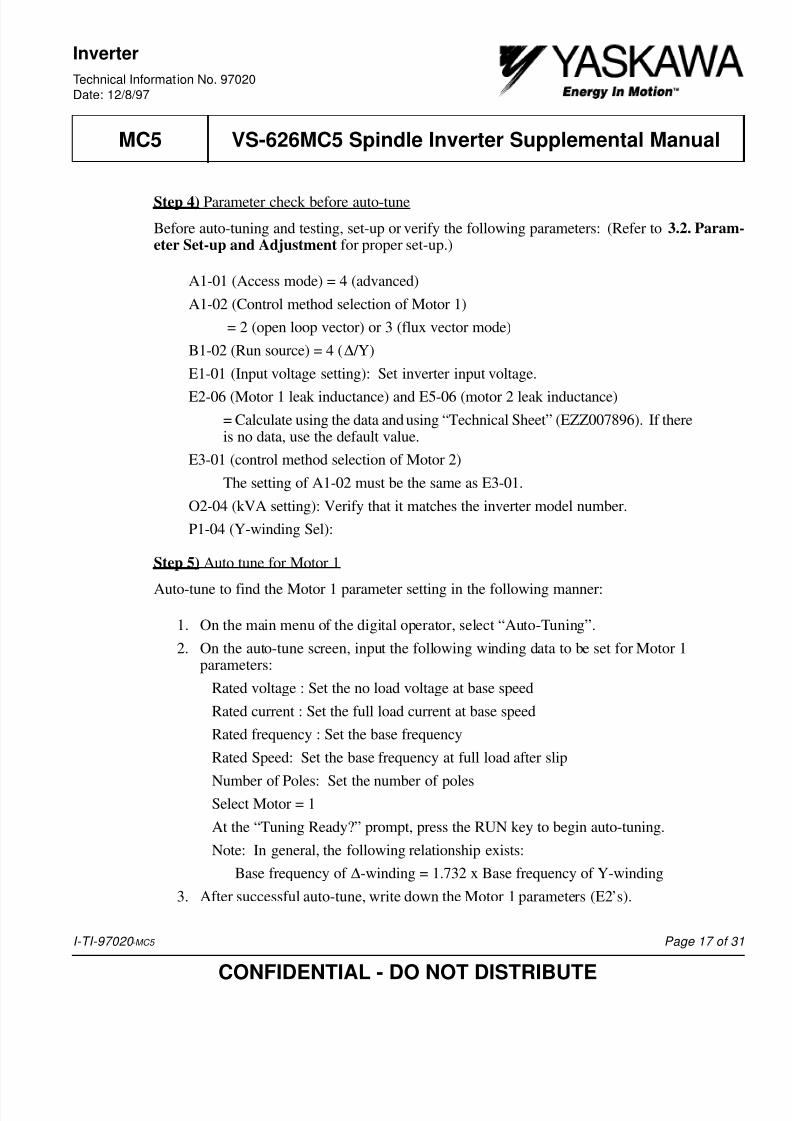
Step 4) Parameter check before auto-tune
Before auto-tuning and testing, set-up or verify the following parameters: (Refer to 3.2. Param-eter Set-up and Adjustment for proper set-up.)
A1-01 (Access mode) = 4 (advanced)
A1-02 (Control method selection of Motor 1)
= 2 (open loop vector) or 3 (flux vector mode)
B1-02 (Run source) = 4 (∆ /Y)
E1-01 (Input voltage setting): Set inverter input voltage.
E2-06 (Motor 1 leak inductance) and E5-06 (motor 2 leak inductance)
= Calculate using the data and using “Technical Sheet” (EZZ007896). If thereis no data, use the default value.
E3-01 (control method selection of Motor 2)
The setting of A1-02 must be the same as E3-01.
O2-04 (kVA setting): Verify that it matches the inverter model number.
P1-04 (Y-winding Sel):
Step 5) Auto tune for Motor 1
Auto-tune to find the Motor 1 parameter setting in the following manner:
1. On the main menu of the digital operator, select “Auto-Tuning”.
2. On the auto-tune screen, input the following winding data to be set for Motor 1parameters:
Rated voltage : Set the no load voltage at base speed
Rated current : Set the full load current at base speed
Rated frequency : Set the base frequency
Rated Speed: Set the base frequency at full load after slip
Number of Poles: Set the number of polesSelect Motor = 1
At the “Tuning Ready?” prompt, press the RUN key to begin auto-tuning.
Note: In general, the following relationship exists:
Base frequency of ∆-winding = 1.732 x Base frequency of Y-winding
3. After successful auto-tune, write down the Motor 1 parameters (E2’s).

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 18/31
Page 18 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
4. Repeat the auto-tuning (#2 through #3)and record the resulting parameters (E2’s)for at least three trials. Verify for consistency. Take the average value and set theaverage values into E2 parameters as the final Motor 1 data.
Step 6) Auto-tune for Motor 2
Auto-tune to find the Motor 2 parameter setting in the following manner:
1. On the main menu of the digital operator, select “Auto-Tuning.”
2. On the auto-tune screen, input the following data of the winding to be set for Mo-tor 2 parameters:
Rated voltage : Set the no load voltage at base speed
Rated current : Set the full load current at base speed
Rated frequency : Set the base frequency
Rated Speed: Set the base frequency at full load after slip
Number of Poles: Set the number of poles
Select Motor = 2
At the “Tuning Ready?” prompt, press RUN key to start auto-tuning.
3. After successful auto-tune, write down the Motor 2 parameters (E2’s).
4. Repeat the auto-tuning (#2 through #3)and record the resulting parameters (E5’s)for at least three trials. Verify for consistency. Take the average value and set theaverage values into E5 parameters as the final Motor 2 data.
Step 7) V/f Pattern Adjustment
After completing auto-tuning to find both Motor 1 and Motor 2 parameters, adjust the V/f pat-terns (E1’s for Motor 1 and E4’s for Motor 2). This is especially important when the maximumfrequency is higher than the base frequency. Adjust E1-05 and E4-02 (maximum voltage), thenset the maximum frequency of the ∆-winding to both E1-04 and E4-01. It is essential to have thesetting of E1-04 equal to E4-01 for the winding change to work properly.
Step 8) Test Run from Local Mode
If possible, test run the motor from local mode to verify that the winding change is done properly
at the desired frequency range. Adjust the parameters on Table 3.3 if necessary.

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 19/31
Page 19 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
5. Troubleshooting
Table 5.1 shows the additional fault codes of VS-626MC5. Table 5.2 is a troubleshoot guideline to theproblems related to winding change applications.
If any of the faults described in Tables 5.1 and 5.2 occur, check the cause and perform a relevant correc-tive action. If the inspections and corrective actions do not solve the problem, contact your Yaskawarepresentative.
Table 5.1 Additional Fault Codes and Corrective Actions
Fault Code Description Check Point Corrective Action
OPE12
(Y/ ∆ Seq Fault)
One of the following conditions occurred:
1. Multi-function digital inputs are se-lected to “80” (Y/ ∆ Change) and “16”(Motor 2 Select) at the same time.
2. Multi-function digital inputs are se-lected to “81” (MC Ansback N.C.) and“82” (MC Ansback N.O.) at the sametime.
3. Multi-function digital inputs are se-lected to “80” or P1-01 (Changeover
Freq) is not equal to zero, but B1-02(Run Source) is not set to 4 (Y/ ∆ Seq).
Check the parameter setting Correct the parameter setting
MCANS
(MC Ansback Fault)
One of the following conditions occurred:
1. Expected answer-back signal from themagnetic contactor is not receivedwithin the time specified by P1-03.
2. Magnetic contactor changed the wind-ing unexpectedly.
Wrong setting of H1 parame-ter (“81” or “82”)
Correct the parameter setting
Magnetic contactor is not en-ergized.
Apply power to the magneticcontactor
Loose wiring Correct wiring
Defective magnetic contactor Replace the magnetic contac-tor

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 20/31
Page 20 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Table 5.2 Winding Change Related Failures and Corrective Actions
Fault Possible cause / Checkpoint Corrective Action
Motor does not changewinding
Is the magnetic contact answerback faultdetection used?
Use magnetic contactor answerback faultdetection (see section 2.3)
Magnetic contactor is not energized. Apply power to the magnetic contactor
Loose wiring on the magnetic contactor Correct wiring
Defective magnetic contactor Replace the magnetic contactor
Wrong motor wiring Correct the wiring
Changeover trigger signal is not received(external winding change)
Correct the setting
Changeover frequency (P1-02) and/orhysterisis (P1-02) is not set correctly (in-ternal winding change)
Correct the parameter setting
Maximum frequency setting of motor 1(E1-04) and motor 2 (E4-01) are not equal
Correct the parameter setting
Magnetic contactor clicksmore than once at
changeover
Wrong setting value of one or more of thefollowing parameters (too large):
L2-03 (PwrL Baseblock t)
L2-04 (PwrL V/F Ramp t)
B3-03 (SpdSrch Dec Time)
C1-01 (Accel Time 1)
Correct the parameter setting
OV (Overvoltage) occursduring winding change
Setting value of L2-04 (PwrL V/F Ramp t)is too small.
Correct the parameter setting
Heavy cutting is performed during wind-
ing change
Avoid heavy cutting during winding
change
OC (Overcurrent) occursduring winding change
Setting value of L2-03 (PwrL Baseblock t)and/or L2-04 (PwrL V/F Ramp t) is toosmall.
Correct the parameter setting
Heavy cutting is performed during wind-ing change
Avoid heavy cutting during windingchange

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 21/31
Page 21 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Appendix A: Auto-Tuning and Parameter Adjustment Examples
Example 1: Using a general purpose AC induction motor in open loop vector mode
In this example, the motor is a 20HP general purpose AC induction type, modified by the user for highspeed spindle application. Originally the motor connection is Y-winding only (3 leads), but it wasmodified so that both Y and ∆ windings are available (6 leads). The rotor was re-balanced and thebearings were replaced with the high speed type to enable the maximum speed of 8000 rpm. The userprefers to the use internal winding change method. A Yaskawa magnetic contactor with answer-back will be used. The user wants to use motor 1 parameters for ∆-winding and motor 2 parameters for Y-winding, and to perform the winding change in the 70~80Hz range.
Step 1. Obtain motor data. The following motor data is obtained from the motor name plate:
AC power supply voltage level = 230V
Number of motor poles = 4
Y-winding data:
Base frequency = 60 Hz
No load voltage at base frequency = 200V
Full load current at base frequency = 58 A
Full load base speed = 1750 rpmMaximum frequency = unknown
No load voltage at maximum speed = unknown
Leakage inductance = unknown
∆-winding data is unknown
Step 2. Select an Inverter. The motor’s full load current at base speed is 58A and the inverter’s ratedcurrent must be at least this much. For the 200V class MC5 inverter, this is the CIMR-MC52015 (rated current is 64A).
Step 3. Wiring: Figure A.1 shows the wiring diagram required for this example.

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 22/31
Page 22 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Step 4. Parameter set-up. The following parameters are set before auto-tuning:
A1-01 = 4 (access mode = advanced)
A1-02 = 2 (open loop vector for motor 1)
B1-02 = 4 (Run source = ∆ /Y)
E1-01 = 230V (Inverter input voltage)
E3-01 = 2 (open loop vector for motor 1)
H1-06 = “82” (Terminal 8: magnetic contactor answer-back, N.O.)
H2-01 = “41” (Terminal 9-10: open magnetic contactor when motor 2 is selected)
O2-04 = “8” (2015) (verify the inverter model #)
P1-01 = 80 Hz (Y to ∆ winding change frequency)P1-02 = 10 Hz (Winding changeover hysterisis)
P1-04 = 1 (Motor 2 for Y-winding)
Use the default setting for all other parameters
RST
811
3φ230V
UVW
MC5
9
10
0V +24V
+24VDCSupply
1φ 230V
17 18
246
13
14
1516
X
179
11
HV-75AP3
U Z
Dual WindingMotor
X V Y W
Figure A.1 Example 1 Wiring Diagram

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 23/31
Page 23 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Step 5. Auto-tune for motor 1 parameters (in this case, ∆-winding) as follows:
a.) Select the “Auto-Tuning” from MENU
b.) Input the following data from the digital operator:
Rated Voltage = 200V (no load voltage at base freq. of ∆-winding)
Rated Current = 58A (full load amp at base freq. of ∆-winding)
Rated Frequency = 60 Hz (base freq. of ∆-winding)
Rated Speed = 1750 rpm
Number of Poles = 4
Select Motor = 1
At the “Tuning Ready?” prompt, press RUN key to start auto-tuning.
c. Auto-tuning was repeated successfully and the resultant motor parameters (E2) are asfollows below. Set the average values in the corresponding parameters.
Step 6. Auto-tune for motor 2 parameters (in this case, Y-winding) as follows:
a.) Select “Auto-Tuning” from the MENU
b.) Input the following data from the digital operator:
Rated Voltage = 200V (no load voltage at base freq. of Y-winding, assumedto be the same as ∆-winding)
Rated Current = 58A (full load amp at base freq. of ∆-winding, assumed to bethe same as ∆-winding)
Parameter 1st Trial 2nd Trial 3rd Trial Average
E2-02 0.62Hz 0.64Hz 0.68Hz 0.65Hz
E2-03 35.2A 35.6A 35.5A 35.5A
E2-05 0.158Ω 0.157Ω 0.157Ω 0.157Ω
E2-07 0.47 0.47 0.48 0.47
E2-08 0.71 0.72 0.72 0.72

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 24/31
Page 24 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Rated Frequency = 103.9 Hz (base freq. of Y-winding = 1.732 x base freq. of ∆-winding)
Rated Speed = 3031 rpm (base rpm of Y-winding =1.732 x base rpm of ∆-winding)
Number of Poles = 4
Select Motor = 2
At the “Tuning Ready?” prompt, press RUN key to start auto-tuning.
c. Auto-tune #2 was repeated successfully and the resultant motor parameters (E5) arefound as follows below. Set the average values in the corresponding parameters.
Step 7. The V/f patterns are adjusted as follows:
E1-04 = 266.7Hz (maximum frequency of motor 1)
E1-05 = 200V (voltage at maximum frequency of motor 1)
E4-01 = 266.7Hz (maximum frequency of motor 2)
Parameter 1st Trial 2nd Trial 3rd Trial Average
E5-02 0.62Hz 0.64Hz 0.68Hz 1.14Hz
E5-03 35.2A 35.6A 35.5A 20.5A
E5-05 0.158Ω 0.157Ω 0.157Ω 0.292Ω
7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 25/31
Page 25 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
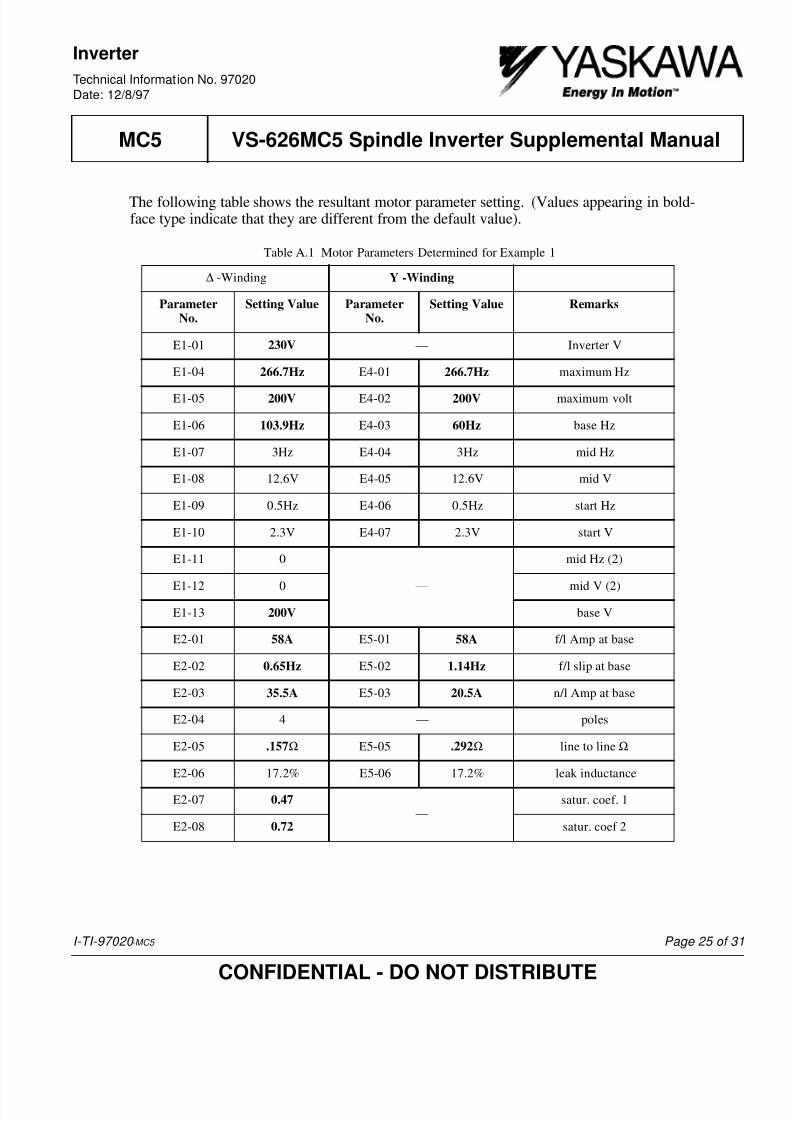
The following table shows the resultant motor parameter setting. (Values appearing in bold-face type indicate that they are different from the default value).
Table A.1 Motor Parameters Determined for Example 1
∆ -Winding Y -Winding
ParameterNo.
Setting Value ParameterNo.
Setting Value Remarks
E1-01 230V — Inverter V
E1-04 266.7Hz E4-01 266.7Hz maximum Hz
E1-05 200V E4-02 200V maximum volt
E1-06 103.9Hz E4-03 60Hz base Hz
E1-07 3Hz E4-04 3Hz mid Hz
E1-08 12.6V E4-05 12.6V mid V
E1-09 0.5Hz E4-06 0.5Hz start Hz
E1-10 2.3V E4-07 2.3V start V
E1-11 0
—
mid Hz (2)
E1-12 0 mid V (2)
E1-13 200V base V
E2-01 58A E5-01 58A f/l Amp at base
E2-02 0.65Hz E5-02 1.14Hz f/l slip at base
E2-03 35.5A E5-03 20.5A n/l Amp at base
E2-04 4 — poles
E2-05 .157Ω E5-05 .292Ω line to line Ω
E2-06 17.2% E5-06 17.2% leak inductance
E2-07 0.47—
satur. coef. 1
E2-08 0.72 satur. coef 2

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 26/31
Page 26 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Step 8. Run the motor using local mode, and verify that the winding change is performed properly atthe designated frequency. Adjust the parameters on table 3.3 if necessary.
Example 2: Use a high speed dual winding spindle motor in flux vector mode
In this example the motor used is a high speed dual winding spindle motor. The motor is equippedwith a 1024ppr encoder with A and B phase, and the user prefers to use a flux vector mode. The userwould like to control the winding change switching from the CNC, and needs to have the frequencydetection 1 signal at a multi-function digital output for the winding changeover logic control. AYaskawa magnetic contactor with answer-back will be used. The winding change should be per-
formed between the base frequency to 5 Hz higher than that.
Step 1. Obtain motor data. The following motor data is obtained from the motor manufacturer:
AC power supply voltage level = 230V
Number of poles of the motor = 4
Y-winding data:
Base frequency = 20Hz
No load voltage at base frequency = 128.4V
Full load current at base frequency = 74.8A
Full load slip frequency at base = 1.198Hz
Maximum frequency = 33.3Hz
No load voltage at maximum speed = 132.4V
Leakage inductance = 1.2674mH (L1+L2)
∆-winding data:
Base frequency = 33.3Hz
No load voltage at base frequency = 127.8V
Full load current at base frequency = 86.3A
Full load slip frequency at base = 0.681HzMaximum frequency = 6000Hz
No load voltage at maximum speed = 129.5V
Leakage inductance = 0.4511mH (L1+L2)

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 27/31
Page 27 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Step 2. Select an Inverter. The motor’s full load current at base speed is 86.3A for the ∆-winding andthe inverter’s rated current must be at least this much. For the 200V class MC5 inverter, thisis the CIMR-MC52022 (rated current is 96A).
Step 3. Wiring: Figure A.2 shows the wiring diagram required for this example.
Step 4. Parameter set-up: The following parameters are set before auto-tuning:
A1-01 = 4 (access mode = advanced)
A1-02 = 3 (Flux vector mode for motor 1)
B1-02 = 4 (Run source = ∆ /Y)
E1-01 = 230V (Inverter input voltage)
E2-06 = 25.7% (Leakage inductance calculated using “Technical Sheet” EZZ007896)
E3-01 = 3 (Flux vector mode for motor 1)
E5-06 = 5.7 % (Leakage inductance calculated using “Technical Sheet” EZZ007896)
F1-01 = 1024 (PG pulses/rev)
F1-05 = 1 (PG direction is cw)
R
ST
8 MCANS11 COM
3φ230V
MC5
26
0V +24V
+24VDCSupply
1φ 230V
17 18
2
46
13
14
15
16
X
79
11
HV-75AP3
Figure A.2 Example 2 Wiring Diagram
27 PG-X2Card(Option)
xPG
7 CHW
9
10
U
VW
Z
XY
1024PPRAB
FromCNC
ToCNC

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 28/31
Page 28 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
H1-05 = “80” (Terminal 7: external Y/ ∆ change)
H1-06 = “82” (Terminal 8: magnetic contactor answer-back, N.O.)
H2-01 = “41” (Terminal 9-10: open magnetic contactor when motor 2 is selected)
H2-03 = “04” (Terminal 26-27: frequency detection 1)
L4-01 = 33.3Hz (speed agree detection level)
L4-02 = 5Hz (speed agree detection width)
O2-04 = “A” (2022) (verify the inverter model #)
P1-04 = 1 (Motor 2 for Y-winding)
Use the default setting for all other parameters
Step 5. Auto-tune for motor 1 parameters (in this case, ∆-winding because of the V/f pattern at highspeed) as follows:
a.) Select “Auto-Tuning” from the MENU
b.) Input the following data from the digital operator:
Rated Voltage = 127.8V (no load voltage at base freq. of ∆-winding)
Rated Current = 86.3A (full load amp at base freq. of ∆-winding)
Rated Frequency = 33.3Hz (base freq. of ∆-winding)
Rated Speed = 980 rpm (base rpm of Y-winding, calculated from full load slip freq. andrated freq.)
Number of Poles = 4
Select Motor = 1
At the “Tuning Ready?” prompt, press RUN key to start auto-tuning.
c.) Auto-tuning was repeated successfully and the resultant motor parameters (E2) are asfollows. Set the average values in the corresponding parameters.
Parameter 1st Trial 2nd Trial 3rd Trial Average
E2-02 0.64Hz 0.64Hz 0.66Hz 0.65Hz
E2-03 39.7A 39.7A 40.0A 39.8A
E2-05 0.077Ω 0.077Ω 0.075Ω 0.076Ω
E2-07 0.37 0.37 0.38 0.37
E2-08 0.62 0.65 0.64 0.64

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 29/31
Page 29 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
Step 6. Auto-tune for motor 2 parameters (in this case, Y-winding) as follows:
a.) Select “Auto-Tuning” from the MENU
b.) Input the following data from the digital operator:
Rated Voltage = 128.4V (no load voltage at base freq. of Y-winding)
Rated Current = 74.8A (full load amp at base freq. of Y-winding)
Rated Frequency = 20.0Hz (base freq. of Y-winding)
Rated Speed = 564 rpm (base rpm of Y-winding, calculated from full loadslip frequency and rated frequency)
Number of Poles = 4
Select Motor = 2
At the “Tuning Ready?” prompt, press RUN key to start auto-tuning.
c. Auto-tune 2) was repeated successfully and the resultant motor parameters (E5) arefound as follows. Set the average values in the corresponding parameters.
Step 7) The V/f patterns are adjusted as follows:E1-04 = 200Hz (maximum frequency of motor 1)
E1-05 = 129.6V (no load voltage at maximum frequency of motor 1)
E4-01 = 200Hz (maximum frequency of motor 2)
E4-02 = 132.4V (no load voltage at maximum frequency of motor 2)
The following table shows the resultant motor parameter setting (Values appearing in bold-
Parameter 1st Trial 2nd Trial 3rd Trial Average
E5-02 1.17 Hz 1.16 Hz 1.15 Hz 1.16 Hz
E5-03 21.8 A 21.8 A 21.9 A 21.8 A
E5-05 0.198 Ω 0.199 Ω 0.198 Ω 0.198 Ω

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 30/31
Page 30 of 31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
CONFIDENTIAL - DO NOT DISTRIBUTE
I-TI-97020 -MC5
face type indicate that they are different from the default value).
Step 8. Test run the motor and verify that the winding change is performed properly at the designatedfrequency. Adjust the parameters on table 3.3 if necessary.
Table A.2: Motor Parameters Determined for Example 2
∆ -Winding Y -Winding
Parameter No. Setting Value Parameter No. Setting Value Remarks
E1-01 230V Inverter V
E1-04 200.0Hz E4-01 200.0Hz maximum Hz
E1-05 129.6V E4-02 132.4V maximum volt
E1-06 33.3Hz E4-03 20Hz base Hz
E1-07 3Hz E4-04 3Hz mid Hz
E1-08 12.6 V E4-05 12.6 V mid V
E1-09 0.5 Hz E4-06 0.5 Hz start Hz
E1-10 2.3 V E4-07 2.3 V start V
E1-11 0 mid Hz (2)
E1-12 0 mid V (2)
E1-13 127.8 V base V
E2-01 86.3 A E5-01 74.8 A f/l Amp atbase
E2-02 0.65 Hz E5-02 1.16 Hz f/l slip at base
E2-03 39.8 A E5-03 21.8 A n/l Amp atbase
E2-04 4 poles
E2-05 0.076 Ω E5-04 .292 Ω line to line Ω
E2-06 19.5 % E5-05 19.5 % leak induc-tance
E2-07 0.37 satur. coef. 1
E2-08 0.64 satur. coef 2

7/28/2019 Yaskawa Manuals 212
http://slidepdf.com/reader/full/yaskawa-manuals-212 31/31
VS-626MC5 Spindle Inverter Supplemental ManualMC5
Inverter
Technical Information No. 97020
Date: 12/8/97
Appendix B: Parameter Modification List from G5 to MC5