page 1 ajacs and hip/automotive antonio kung - trialog copyright (c) 2002 j consortium ®, inc. all...
TRANSCRIPT
....................
......
......
.....
Page 1
AJACS and HIP/Automotive
Antonio Kung - Trialog
Copyright (c) 2002 J Consortium®, Inc. All Rights Reserved
J Consortium is a registered trademark in the United States.JavaTM is a trademark of Sun Microsystems in the United States and other countries.
... ............................................
Page 2
Content
AJACS rationale Technical approach and related issues HIP/Automotive working group

... ............................................
Page 3
The AJACS Project
Applying Java to Automotive Control Systems Web site : www.ajacs.org Consortium
– Trialog– PSA (Peugeot-Citroën)– CRF (Centro Riserche Fiat )– Mecel (technology centre of Delphi)– University of Karslruhe

....................
......
......
.....
Page 4
AJACS Rationale

... ............................................
Page 5
The Trend Today
More global applications– Multiplexing– Connectivity
... ............................................
Page 6
Two Worlds
Infotainment : navigation, Internet, telecom...– AMIC initiative (www.ami-c.com) on Java-based technology
Control bus : powertrain, ABS, engine control...– OSEK/VDX initiative (www.osek-vdx.org) on RTOS and
multiplexing– TTP or Flexray initiatives for fault-tolerance (Drive-by-wire)– LIN Local Interconnect Network initiative
AJACS targets the second world

... ............................................
Page 7
Specification of USER Functions
Cruise ControlUser Function
Display SpeedUser Function
MeasureSpeed
ReadBrake Pedal
Displayvalue
ReadCC-buttons
EngineControl
CruiseControl
Data flow:Vehicle speed
System input:wheel sensor System output:
Speedometer
Sub-function:Engine control

... ............................................
Page 8
Allocation to “ECUs”
ABS Instrument Cluster
Powertrain
Cruise ControlUser Function
Display SpeedUser Function
MeasureSpeed
ReadBrake Pedal
Displayvalue
ReadCC-buttons
EngineControl
CruiseControl
... ............................................
Page 9
General Requirements
Car manufacturers – To have more control on the specification of user functions– To protect trade secrets– To reduce integration cost– To reduce bills of material
For the OEMs– To reduce development cost through “generic platforms”
... ............................................
Page 10
Engineering Requirements
Subfunctions must be independent and relocatable
This implies– standard communication interfaces– software development methodologies that supports easy
customisation and reuse of software components
Java can help meeting all these requirements !
... ............................................
Page 11
Technical Constraints
Typical ECU configurations– Single Chip– 256Kb ROM or Flash– 8Kb to 16Kb RAM
Typical runtime constraints– ~100µs response time for some conditions– Predictability– Overall CPU load from system software < 10%
Closed world– every thing is static

... ............................................
Page 12
AJACS Objectives
Specification, Development, Demonstration of– An open technology– Based on Java– For deeply embedded automotive control systems
Industrial viewpoint– Benefit from OO in terms of structuring, reusability, dependability– WORA attributes to some extent, robustness attributes– Support the same kind of real-time constraints which non Java
based ECUs are managing today. – Single chip approach - Small footprint
....................
......
......
.....
Page 13
Technical Approach. Related Issues

... ............................................
Page 14
Run-time Architecture
Architecture of the target software– Application Java classes
use the HIPA API
Note : Multithreadone-to-one mapping– 1 java thread = 1 OSEK
Task OSEK runtime
HIPA APIs
implementationAJACS
runtime
C standard libraries
Application
Language core
HIPA APIs
... ............................................
Page 15
Generation Approach
Native code approach– Compiler generates low-level, assembler-like C
Approach :– Front-end : Jikes Java front-end from IBM– Java source code translated into AJACS-Abstract Syntax Tree– AJACS-AST translated into C code

... ............................................
Page 16
Specific Technical Constraints
Support of C legacy code– OSEK-Based applications– Drivers (e.g. CAN drivers)
Support current programming practices– OSEK culture– Everything is static
Using Java for system programming– accessing physical memory/registers– bit manipulation– no physical memory rep spec– no typedef
... ............................................
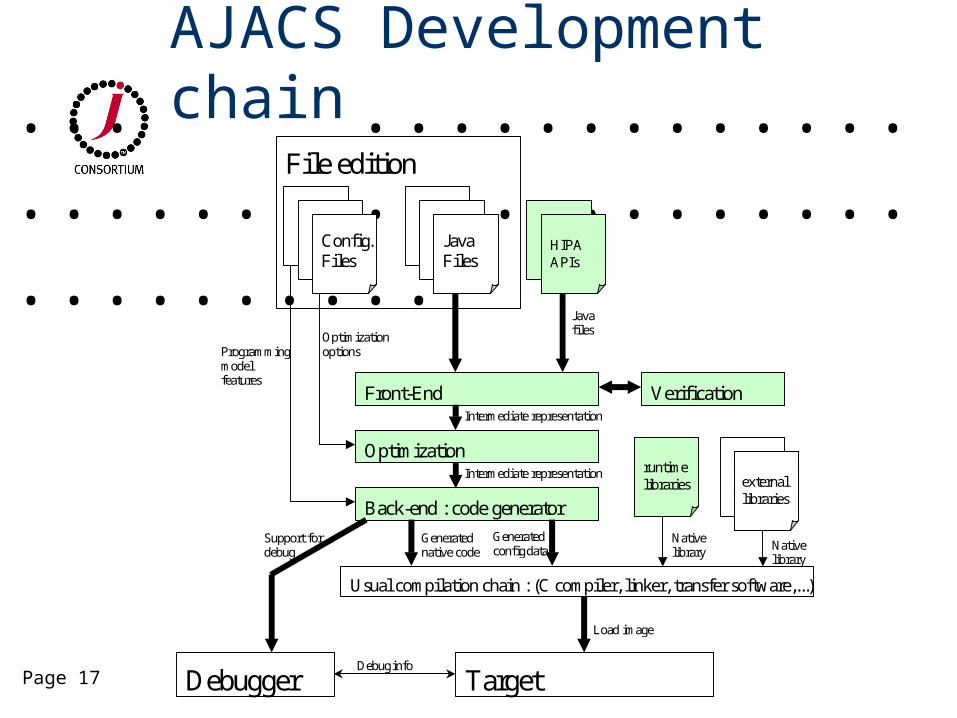
Page 17
AJACS Development chain
File edition
JavaFiles
Config.Files
Front-End
Back-end : code generator
Optimization
HIPAAPIs
runtimelibraries
Usual compilation chain : (C compiler, linker, transfer software,...)
Verification
Target
externallibraries
Generatednative code
Generatedconfigdata
Load image
Debuginfo
Nativelibrary Native
library
Javafiles
Intermediate representation
Intermediate representation
OptimizationoptionsProgramming
modelfeatures
Debugger
Support fordebug

... ............................................
Page 18
Java Run-time Issues 1
C/Native Interface– Very simple implementation (e.g. direct name matching,
parameters can be only primitive types ...)
Exception management– Currently implemented : backward propagation from Callee to
Caller.
Debugging– Will rely on usual C debugging solution + instrumentation of the
generated code to retrieve original Java source code.
... ............................................
Page 19
Java Run-Time Issues 2
Supporting Core classes– directly managed by the compiler
Class initialization– performed at compile-time
Concurrency– threads are mapped directly by underlying OSEK– Java synchronization means not yet implemented
Object ROMization– first step : the user explicitly specifies objects to be ROMized– further investigation : automatic ROMization by code analysis

... ............................................
Page 20
AJACS Status
Requirements Specification and Architecture
– HIPA 0.3 Draft– AJACS architecture
Reference Implementation - Jan 2002– Run-time on top of OSEK/VDX– Code generator– ECU platform
Evaluation - June 2002– PSA : body control application– CRF : dashboard application

....................
......
......
.....
Page 21
HIP/AutomotiveWorking Group

... ............................................
Page 22
What is HIP/Automotive
High Integrity Profile– HIP requirements– Static tasking model from Real-time core
High Integrity Profile /Automotive– HIP requirements– Static tasking model from OSEK
... ............................................
Page 23
Main orientations of HIP/A
Native code compilation expected– not imposed
Execution of complete applications Static configuration
– all system entities are defined prior to generation– Specific language for configuration purpose
Support for OSEK legacy

... ............................................
Page 24
Current Status
Draft 0.3 Harmonisation work with HIP has been started
– a work document has been released in order to identify the common requirements with HIP
... ............................................
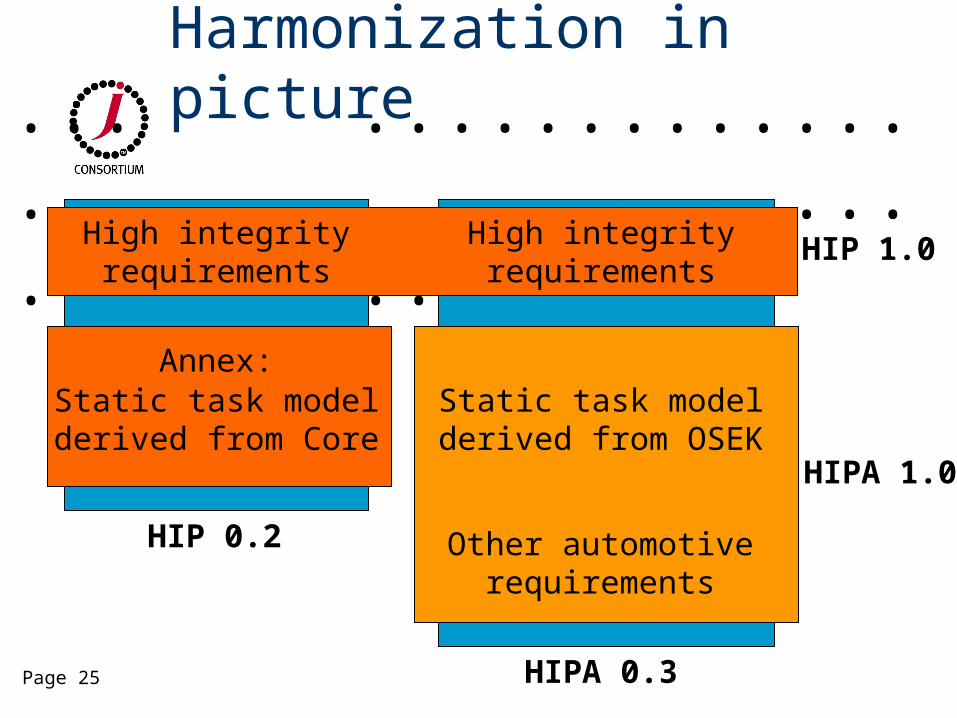
Page 25
Harmonization in picture
HIP 0.2
HIPA 0.3
HIP 1.0High integrityrequirements
High integrityrequirements
HIPA 1.0
Static task modelderived from OSEK
Other automotiverequirements
Annex:Static task modelderived from Core

....................
......
......
.....
Page 26
Implementation Aspects
... ............................................
Page 27
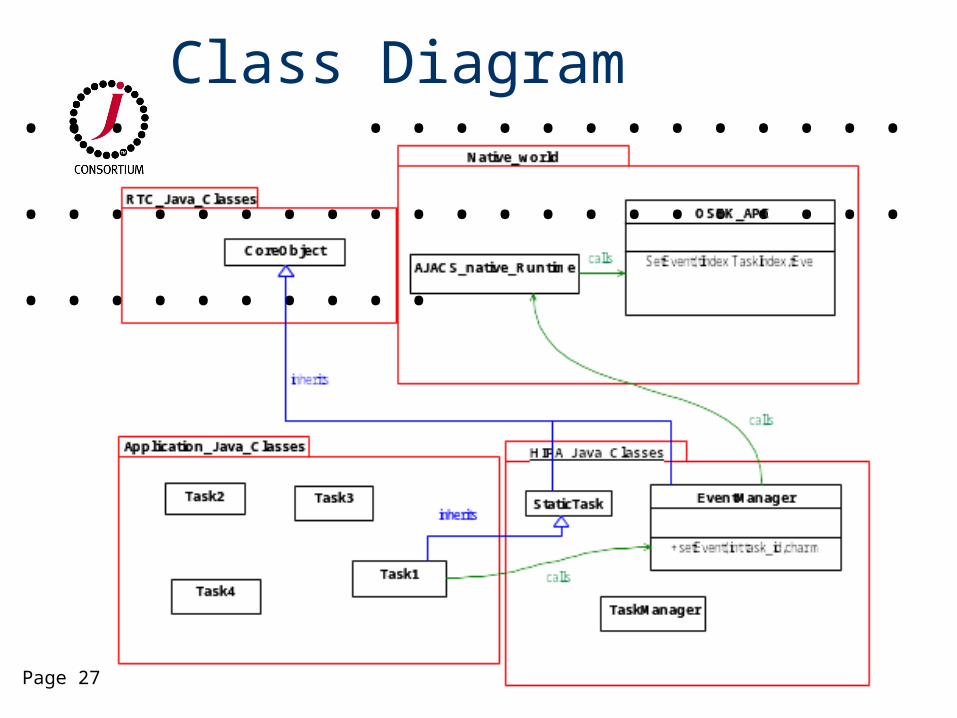
Class Diagram

... ............................................
Page 28
Java: Task 1 structure
public class Task1 extends StaticTask {
...
public void work() {EventManager.setEvent (Task2, Event2);
...
}
}HIPA service
... ............................................
Page 29
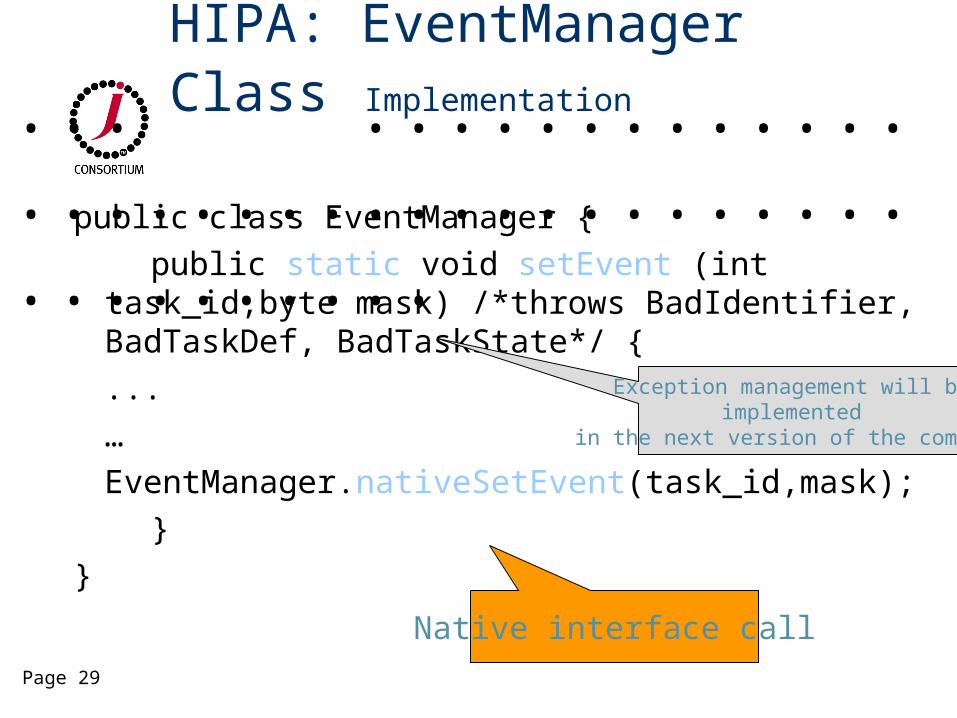
HIPA: EventManager Class Implementation
public class EventManager {
public static void setEvent (int task_id,byte mask) /*throws BadIdentifier, BadTaskDef, BadTaskState*/ {
...
…
EventManager.nativeSetEvent(task_id,mask);
}
} Native interface call
Exception management will be implemented
in the next version of the compiler
... ............................................
Page 30
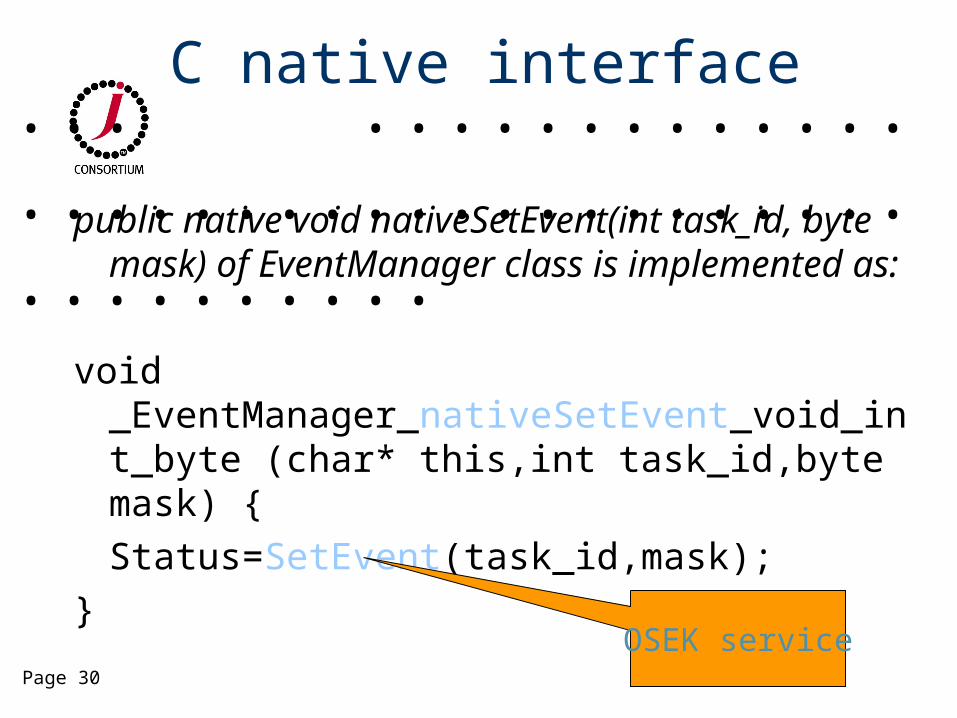
C native interface
public native void nativeSetEvent(int task_id, byte mask) of EventManager class is implemented as:
void _EventManager_nativeSetEvent_void_int_byte (char* this,int task_id,byte mask) {
Status=SetEvent(task_id,mask);
}
OSEK service

... ............................................
Page 31
CompilationCore class
HIPA class
C compilation
Application class
... ............................................
Page 32
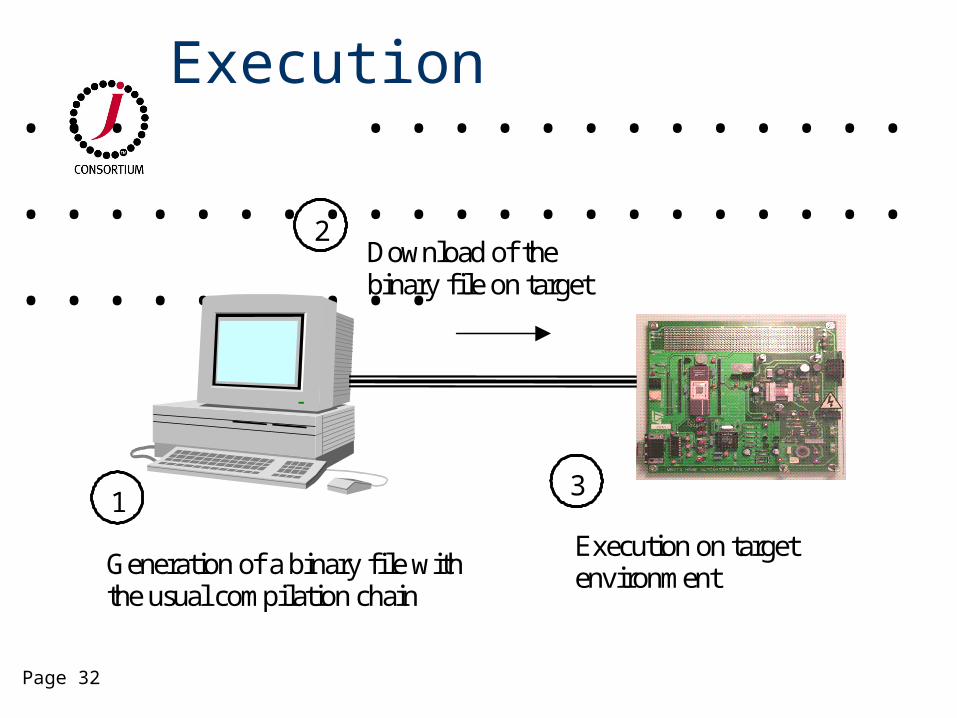
Execution
Execution on targetenvironmentGeneration of a binary file with
the usual compilation chain
Download of thebinary file on target
1
2
3

... ............................................
Page 33
Technology Availability
Two packages to be available for evaluation PC evaluation
– Compiler– Minimal run-time
68336 evaluation kit– Compiler– AJACS run-time– HIPA run-time– OSEK/VDX– 68336 board with CAN interfaces

....................
......
......
.....
Page 34
Thank You