1 chapter 2 – linear transformations outline 2.1 introduction to linear transformations and their...
TRANSCRIPT

1
Chapter 2 – Linear Transformations
Outline2.1 Introduction to Linear Transformations and Their Inverses2.2 Linear Transformations in Geometry2.3 The Inverse of a Linear Transformation2.4 Matrix Products

2
2.1 Introduction to Linear Transformations and Their Inverses
•
• The matrix A is called the coefficient matrix of the transformation.
• is called a linear transformation.• : the decoding transformation.• : the inverse of the coding
transformation.• Since the decoding transformation is
the inverse of the coding transformation , we say that the matrix B is the inverse of the matrix A. We can write this as .
xAy
x
x
xx
xx
y
y
2
1
21
21
2
1
52
31
52
3xAy
xAy
xy
yx
yBx
xAy
1AB
3
Invertible
• No all linear transformations are invertible.
• Suppose with matrix , the solutions are
– Because this system does not have a unique solution, it is impossible to recover the actual position from the encoded position. The coding matrix A is noninvertible.
• Consider two sets X and Y. A function T from X to Y is a rule that associates with each element x of X a unique element y of Y.– The set X is called the domain of the function, and Y is its codomain.
We will sometimes refer to x as the input of the function and to y as its output.
212
211
42
2
xxy
xxy
42
21A
t
t
x
x 289
2
1

4
Linear Transformations
• (Definition 2.1.1) A function T from Rn to Rm is called a linear transformation if there is an m ×n matrix A such that for all in Rn.
• A linear transformation is a special kind of function.
• The identity transformation from Rn to Rn: all entries on the main diagonal are 1, and all other entries are 0. This matrix is called the identity matrix and is denoted by In.
• , where . The output vector is obtained from by rotating through an angle of 90o in the counterclockwise.
xAxT
)(
x
xAy
01
10A y
x

5
(Fact 2.1.2) The Column of the Matrix of a Linear Transformation
• (Fact 2.1.2) Consider a linear transformation T from Rm to Rn. Then, the matrix of T is
– To justify this result, we have
then
– The vectors in Rm are sometimes referred to as the standard vectors in Rm. The standard vectors in R3 are often denoted by
|||
|||
21 mvvvA
imiii vvvvveAeT
0
1
0
0
||||
||||
21
meee
,, 21
321 ,, eee
kji
,,
0
1
0
0
where,
|||
)()()(
|||
21
im eeTeTeTA

6
(Fact 2.1.3) Linear Transformations
• (Fact 2,1,3) A transformation T from Rn to Rm is linear if (and only if)– , for all ,
in Rn, and
– , for all in Rn and all scalars k.
wTvTwvT
v
w
vkTvkT
v

7
2.2 Linear Transformations in Geometry
• (Example 1) Consider the matrices
Show the effect of each of these matrices on our standard letter L, and describe each transformation in words.
10
01,
00
01,
20
02CBA
11
11,
10
5.01,
01
10FED
8
Scalings
• For any positive constant k, the matrix defines a scaling by k, since
This is a dilation (or enlargement) if k exceeds 1, and it is a contraction (or shrinking) for values of k between 0 and 1.
k
k
0
0
xkx
xk
kx
kx
x
x
k
kx
k
k
2
1
2
1
2
1
0
0
0
0
9
Projections
• Consider a line L in the plane, running through the origin. Any vector in R2 can be written uniquely as
where is parallel to line L, and is perpendicular to L.
• The transformation from R2 to R2 is called the projection of onto L, often denoted by :
x
xxx ||
||x x
||xxT
x xL
proj
||proj xxL

10
Example 2
• (Example 2) Find the matrix A of the projection onto the line L spanned by
3
4v

11
Definition 2.2.1 Projections
• (Definition 2.2.1) Consider a line L in the coordinate plane, running through the origin. Any vector in R2 can be written uniquely as
where is parallel to line L, and is perpendicular to L.
• The transformation from R2 to R2 is called the projection of onto L, often denoted by . If is a unit vector parallel to L, then
The transformation is linear, with matrix
xxx ||
x
||x x
||xxT
x xL
proj
2
1
u
uu
.)()(proj uuxxL
)(proj)( xxT L
2221
2121
uuu
uuu

12
Reflections

13
Definition 2.2.2 Reflections
• (Definition 2.2.2) Consider a line L in the coordinate plane, running through the origin, and let be a vector in R2. The linear transformation is called the reflection of about L, often denoted by :
We have a formula relating to :
The matrix of T is of the form , where a2+b2=1.
xxx ||
xxxT ||)( x
)(ref xL
xxxL
||)(ref
)(ref xL
xL
proj
.)(2)(proj2)(ref xuuxxxx LL
ab
ba
14
Projections and Reflections in Space
• Let be the plane through the origin perpendicular to L; note that the vector will be parallel to . We can give formulas for the orthogonal projection onto V, as well as for the reflections about V and L, in terms of the projection onto L:
VL
VL x
uuxxxxx LV
)()(proj)(proj
xuuxxxxxx LVLL
)(2)(proj2)(proj)(proj)(ref
uuxxxxxx LLVV
)(2)(ref)(proj)(proj)(ref

15
Example 3
• (Example 3) Let V be the plane defined by 2x1+x2-2x3=0, and let . Find
2
4
5
x
)(ref xV
16
Fact 2.2.3 Rotations
• (Fact 2.2.3) The matrix of a counterclockwise rotation in R2 through an angle θ is
Note that this matrix is of the form , where a2+b2=1.
cossin
sincos
ab
ba
17
Rotations
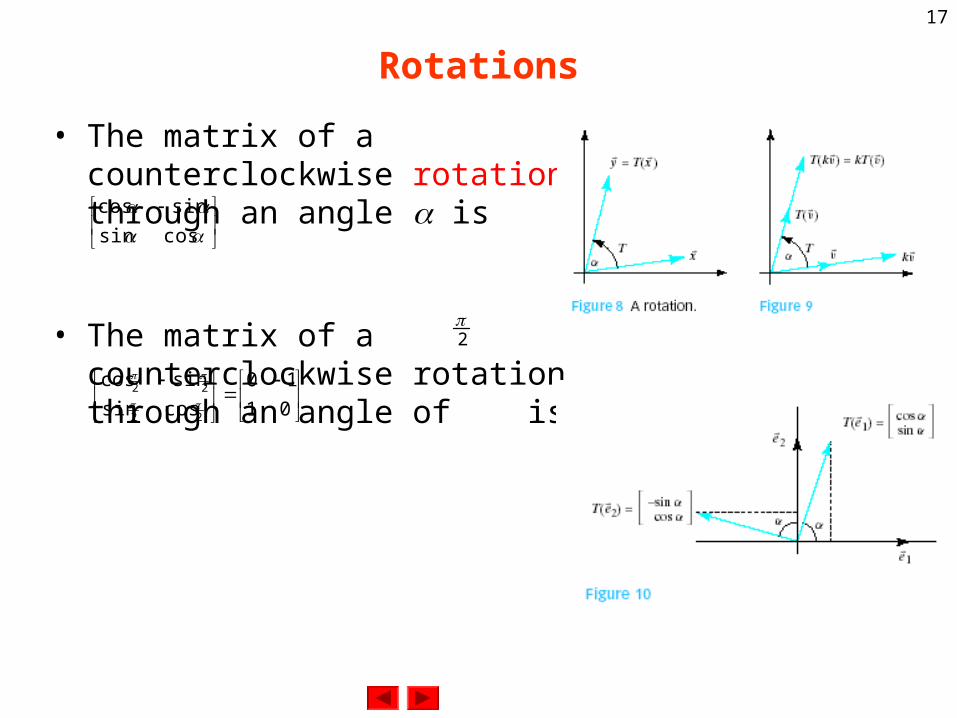
• The matrix of a counterclockwise rotation through an angle is
• The matrix of a counterclockwise rotation through an angle of is
cossin
sincos
01
10
cossin
sincos
22
22
2

18
Example 4 &5
• (Example 4) The matrix of a counterclockwise rotation through π/6 (or 30o) is
• (Example 5) Examine how the linear transformation
affects our standard letter L. Here a and b are arbitrary constants.
.31
13
2
1
)6/cos()6/sin(
)6/sin()6/cos(
xab
baxT
)(
19
Fact 2.2.4 Rotations Combined with a Scaling
• (Fact 2.2.4) A matrix of the form represents a rotation combined with a scaling.More precisely, if r and θ are the polar coordinates of
vector , then represents a rotation through θ combined with a scaling by r.
ab
ba
b
a
ab
ba

20
Rotation-Dilations
21
Shears
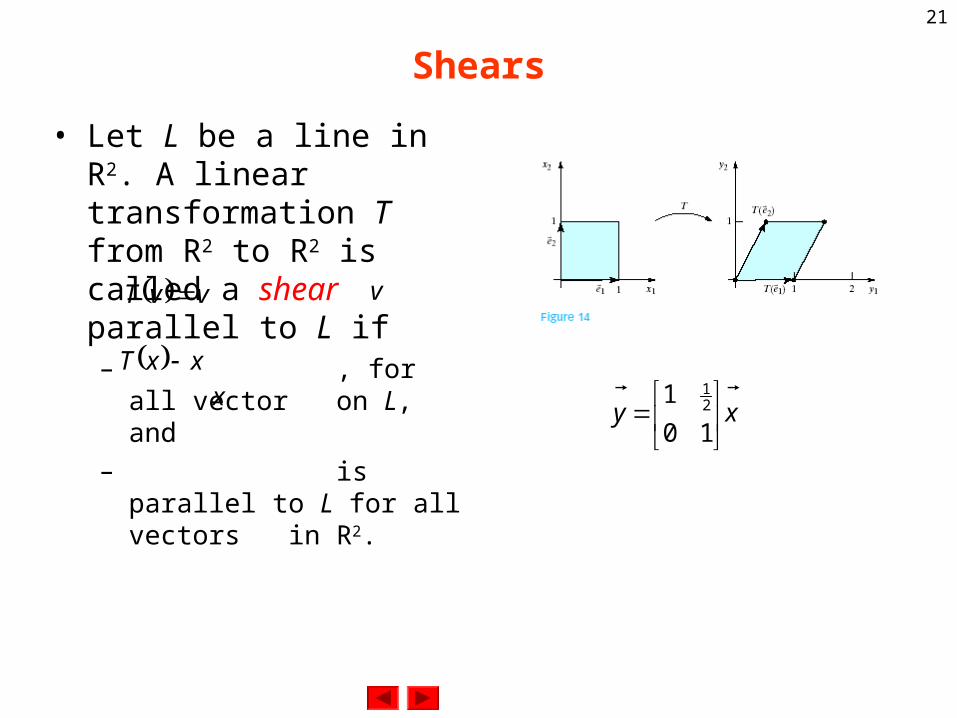
• Let L be a line in R2. A linear transformation T from R2 to R2 is called a shear parallel to L if– , for all vector on L,
and
– is parallel to L for all vectors in R2.
vvT
v
xxT
x
xy
10
1 21

22
Fact 2.2.5 Horizontal and Vertical Shears
• (Fact 2.2.5) The matrix of a horizontal shear is of the
form , and the matrix of a vertical shear is of the
form , where k is an arbitrary constant.
10
1 k
1
01
k

23
Shears (II)

24
2.3 The Inverse of Linear Transformation
• (Definition 2.3.1) A function T from X to Y is called invertible if the equation T(x)=y has a unique solution x in X for each y in Y.
• If a function T is invertible, then so is T-1, and (T-1)-1=T.
25
Invertible
• Consider the linear transformation from Rn to Rm given bywhere A is an matrix– m<n
The system has either no solutions or infinitely many solutions. The transformation is noninvertible.
– m=nThe system has a unique solution if and only if rref(A)=In. Therefore, the transformation is invertible if and only if reff(A)=In, or equivalently, if rank(A)=n.
– m>nThe transformation is noninvertible since the system is inconsistent.
nmxAy
xAy
xAy
xAy
x
xAy
xAy

26
Invertible Matrices
• (Definition 2.3.2) A matrix A is called invertible if the linear transformation is invertible. The matrix of the inverse transformation is denoted by A-1. If the transformation is invertible, its inverse is .
• (Fact 2.3.3) An matrix A is invertible if and only if– A is a square matrix (i.e., m=n), and
– rref(A)=In.
• (Fact 2.3.4) Let A be an matrix– Consider a vector in Rn. If A is invertible, then the system has
the unique solution . If A is noninvertible, then the systemhas infinitely many solutions or none.
– Consider the special case when . The system has as a solution. If A is invertible, then this is the only solution. If A is noninvertible, then there are infinitely many other solutions.
xAy
xAy
yAx 1
nm
nmb
bxA
bAx 1 bxA
0
b 0
xA 0
x
27
Example 1
• (Example 1) Is the matrix A invertible?
987
654
321
A

28
Finding the Inverse of a Matrix
• If a matrix A is invertible, how can we find the inverse matrix A-1?
283
232
111
A

29
Finding the Inverse of a Matrix
• (Fact 2.3.5) To find the inverse of an n×n matrix A, form the n× (2n) matrix [A|In] and compute rref[A|In].– If rref[A|In] is of the form [In|B], then A is invertible, and A-1=B.
– If rref[A|In] is of another form (i.e., its left half fails to be In), then A is not invertible. Note that the left half of rref[A|In] is rref(A).
30
Inverse and Determinant of a 2×2 Matrix
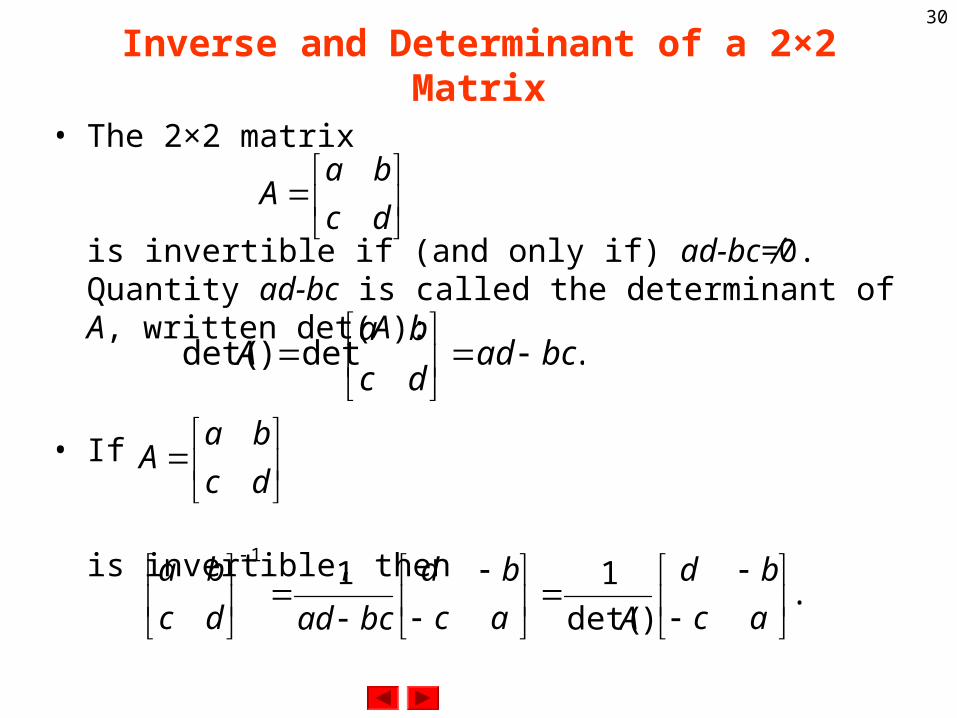
• The 2×2 matrix
is invertible if (and only if) ad-bc≠0.Quantity ad-bc is called the determinant of A, written det(A):
• If
is invertible, then
dc
baA
.det)det( bcaddc
baA
dc
baA
.)det(
111
ac
bd
Aac
bd
bcaddc
ba
31
2.4 Matrix Products
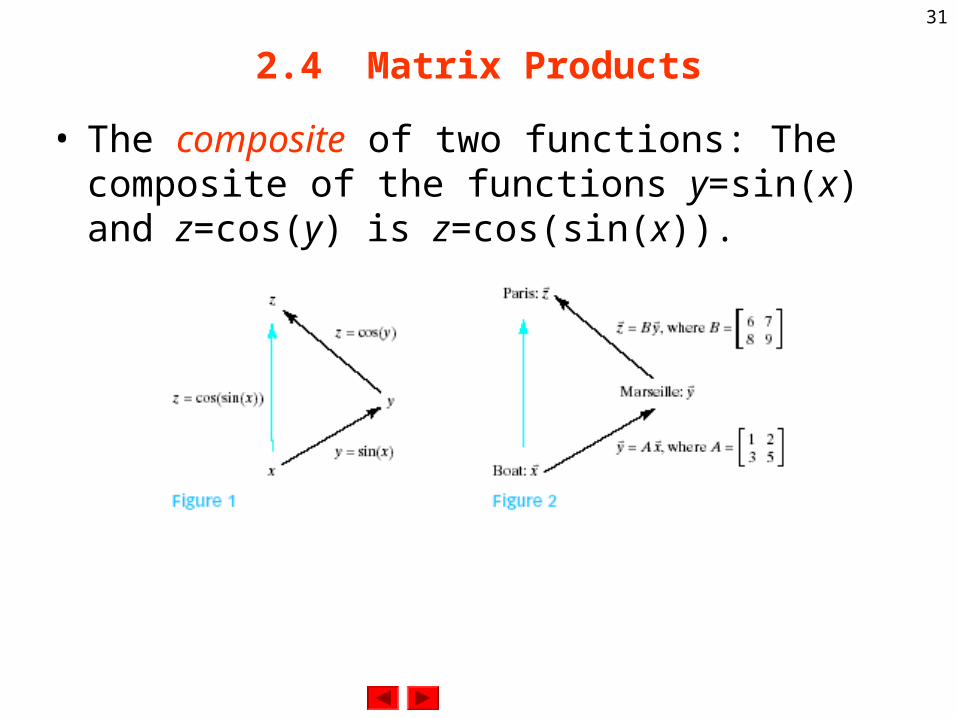
• The composite of two functions: The composite of the functions y=sin(x) and z=cos(y) is z=cos(sin(x)).

32
Matrix Multiplication

33
Definition 2.4.1 Matrix Multiplication
• (Definition 2.4.1)– Let B be an n×p matrix and A a q×m matrix. The product BA is
defined if (and only if) p=q.
– If B is an n×p matrix and A a p×m matrix, then the product BA is defined as the matrix of the linear transformation . This means that , for all in Rm. The product BA is an n×m matrix.
)()( xABxT
xBAxABxT
)()()( x

34
Fact 2.4.2 The Columns of the Matrix Product
• (Fact 2.4.2) Let B be n×p matrix and A a p×m matrix with columns Then, the product BA is
To find BA, we can multiply B with the columns of A and combine the resulting vectors.
.,,, 21 mvvv
|||
|||
|||
|||
2121 mm vBvBvBvvvBBA
35
Fact 2.4.3
• (Fact 2.4.3)– Matrix multiplication is noncommutative.
– AB≠BA, in general. However, at times it does happen that AB=BA; then we say that the matrices A and B commute.
36
Fact 2.4.4 The Entries of the Matrix Product
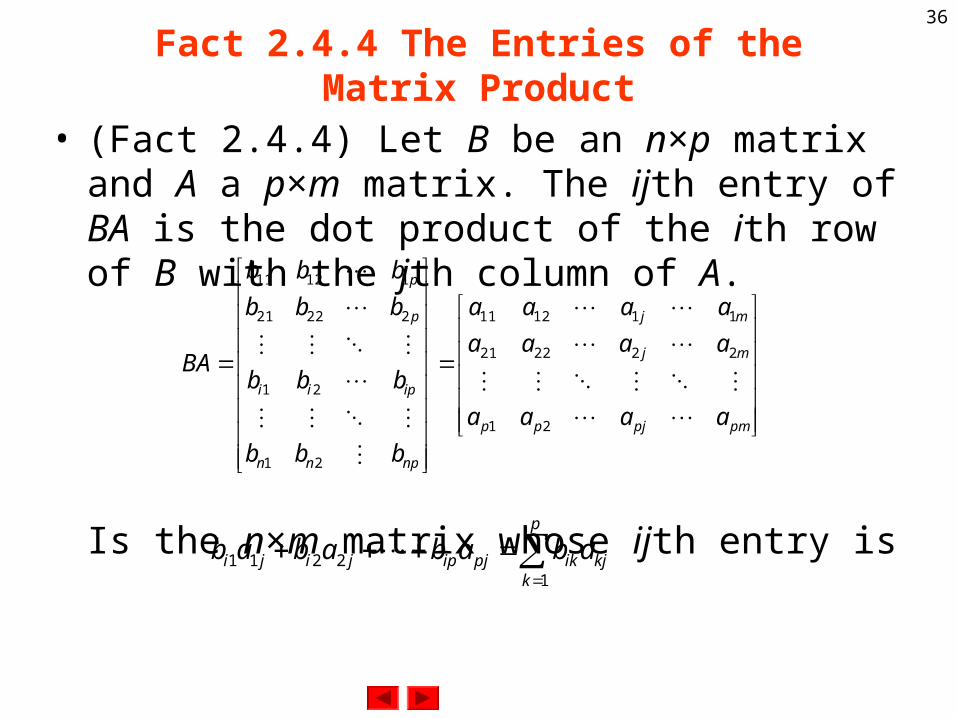
• (Fact 2.4.4) Let B be an n×p matrix and A a p×m matrix. The ijth entry of BA is the dot product of the ith row of B with the jth column of A.
Is the n×m matrix whose ijth entry is
pmpjpp
mj
mj
npnn
ipii
p
p
aaaa
aaaa
aaaa
bbb
bbb
bbb
bbb
BA
21
222221
111211
21
21
22221
11211
p
kkjikpjipjiji abababab
12211

37
Example 1
53
21
98
76• (Example 1)

38
Fact 2.4.5 Multiplying with the Inverse
• (Fact 2.4.5) For an invertible n×n matrix A,
. and 11nn IAAIAA

39
Fact 2.4.6 Multiplying with the Identity Matrix
• (Fact 2.4.6) For an n×m matrix A,.AAIAI nm

40
Fact 2.4.7 Matrix Multiplication is Associative
• (Fact 2.4.7) Matrix multiplication is associative (AB)C=A(BC)We can simply write ABC for the product (AB)C=A(BC).
41
Fact 2.4.8 The Inverse of a Product of Matrices
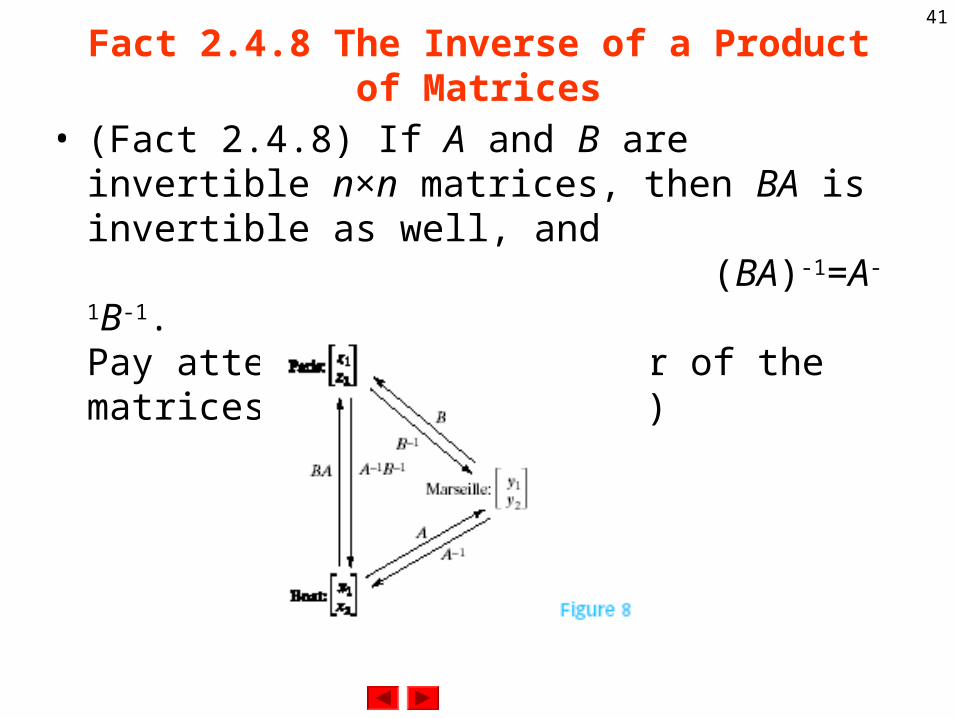
• (Fact 2.4.8) If A and B are invertible n×n matrices, then BA is invertible as well, and (BA)-1=A-1B-1.Pay attention to the order of the matrices. (Order matters!)

42
Fact 2.4.9 A Criterion for Invertibility
• (Fact 2.4.9) Let A and B be two n×n matrices such that BA=In
Then,– A and B are both invertible,
– A-1=B and B-1=A, and
– AB=In.
43
Example 2
• (Example 2) Suppose A, B, and C are three n×n matrices and ABC=In. Show that B is invertible, and express B-1 in terms of A and C.

44
Fact 2.4.10 Distributive Property for Matrices
• (Fact 2.4.10) If A and B are n×p matrices, and C and D are p×m matrices, then A(C+D)=AC+AD, and (A+B)C=AC+BC.

45
Fact 2.4.11
• (Fact 2.4.11) If A is an n×p matrix, B is a p×m matrix, and k is a scaler, then (kA)B=A(kB)=k(AB).
46
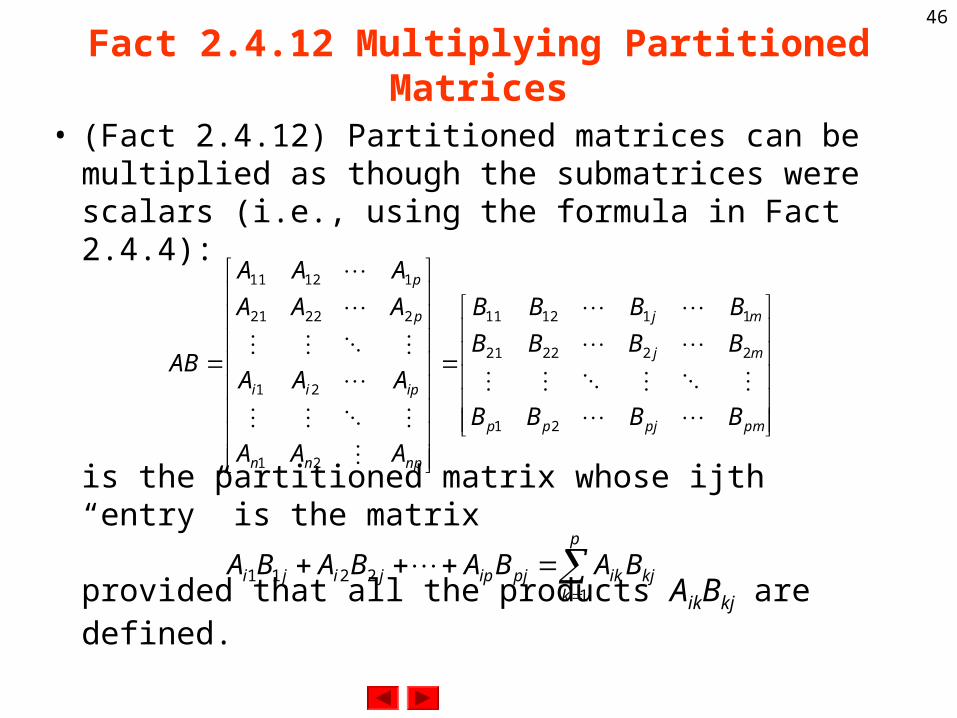
Fact 2.4.12 Multiplying Partitioned Matrices
• (Fact 2.4.12) Partitioned matrices can be multiplied as though the submatrices were scalars (i.e., using the formula in Fact 2.4.4):
is the partitioned matrix whose ijth “entry” is the matrix
provided that all the products AikBkj are defined.
pmpjpp
mj
mj
npnn
ipii
p
p
BBBB
BBBB
BBBB
AAA
AAA
AAA
AAA
AB
21
222221
111211
21
21
22221
11211
p
kkjikpjipjiji BABABABA
12211
47
Example 3
• (Example 3)
987
654
321
101
110

48
Example 4
• (Example 4) Let A be a partitioned matrix
where A11 is an n×n matrix, A22 is an m×m matrix, and A12 is an n×m matrix.– For which choices of A11, A12, and A22 is A invertible?
– If A is invertible, what is A-1 (in terms of A11, A12, A22)?
22
1211
0 A
AAA

49
Example 5
• (Example 5) 1
10000
01000
00100
65421
32111