1 lab1 objectives get familiar w/ hardware mote interface board mote mote sensor board get...
TRANSCRIPT
1
Lab1
Objectives Get familiar w/ hardware
Mote interface board Mote Mote sensor board
Get familiar w/ software MoteWorks Programmer’s notepad Setting up environment
2
Crossbow classroom kit
Hardware Mote interface board (MIB)
a.k.a. programmer, gateway, programming board, PC interface board
Mote processor/radio board a.k.a. mote tiny computer w/ radio communication
Mote sensor board a.k.a. Data acquisition board (DAQ board) Temperature, light, humidity, …
Software MoteWorks
3
Crossbow hardware
Mote Interface Board (“MIB”) MIB510 MIB520 MIB600
Mote 433MHz Mica2 868/916MHz Mica2 (MPR400CB) 2.4GHz MicaZ
Sensor board MTS/MDA series MDA100CB
PC
4
Hardware we’ll use
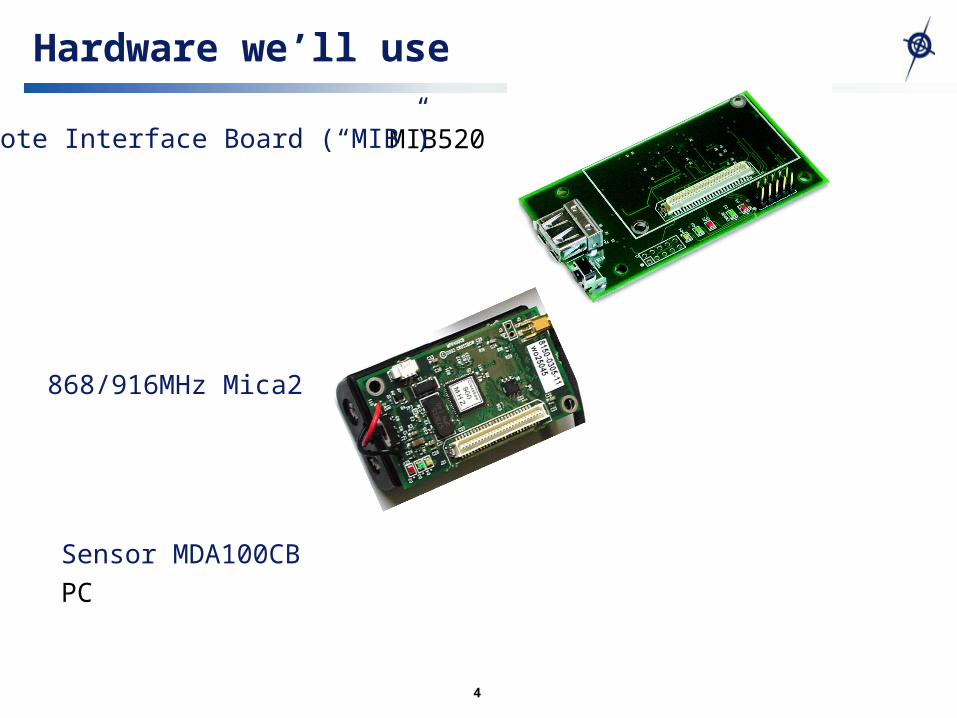
MIB520 Mote Interface Board (“MIB”)
868/916MHz Mica2
Sensor MDA100CB
PC
Feb 2007WSN Training: MW Orientation and Configuration 5
MoteWorks Orientation
Objectives: Review directory structure MakeXbowlocal and environment customization
Lab Blink make command Compiling using Programmer’s Notepad
6
What SW Packages Are Provided by MoteWorks?
Development Environment Cygwin -- Alternative UI to
view and compile code; Programmers Notepad is the main UI
MoteConfig 2.0 and OTAP XSniffer Programmer’s Notepad 2 GraphViz 2.6 PuTTY Utilities WinMerge 2.4.6.0
Compilers nesC 1.2 AVR-GCC compiler for
Atmel Atmega128 microcontroller
GDB debugger and AVR Insight
7
Directory Structures
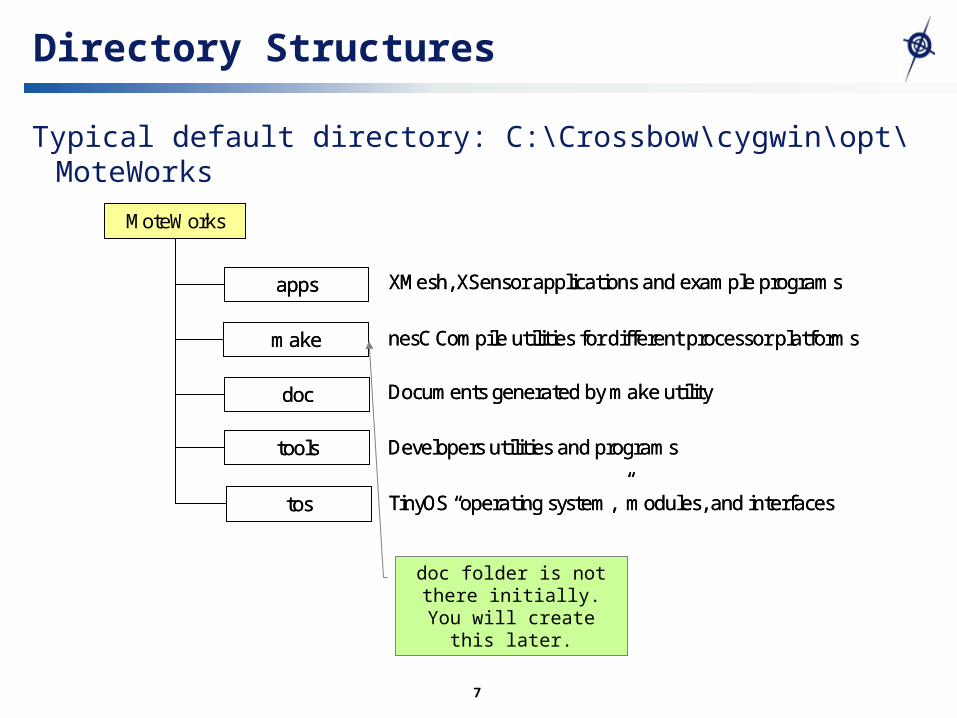
Typical default directory: C:\Crossbow\cygwin\opt\MoteWorks
MoteWorks
apps
make
doc
tools
tos
XMesh, XSensor applications and example programs
nesC Compile utilities for different processor platforms
Documents generated by make utility
Developers utilities and programs
TinyOS “operating system,”modules, and interfaces
MoteWorks
apps
make
doc
tools
tos
XMesh, XSensor applications and example programs
nesC Compile utilities for different processor platforms
Documents generated by make utility
Developers utilities and programs
TinyOS “operating system,”modules, and interfaces
doc folder is not there initially. You will create this later.
8
Directory Structures
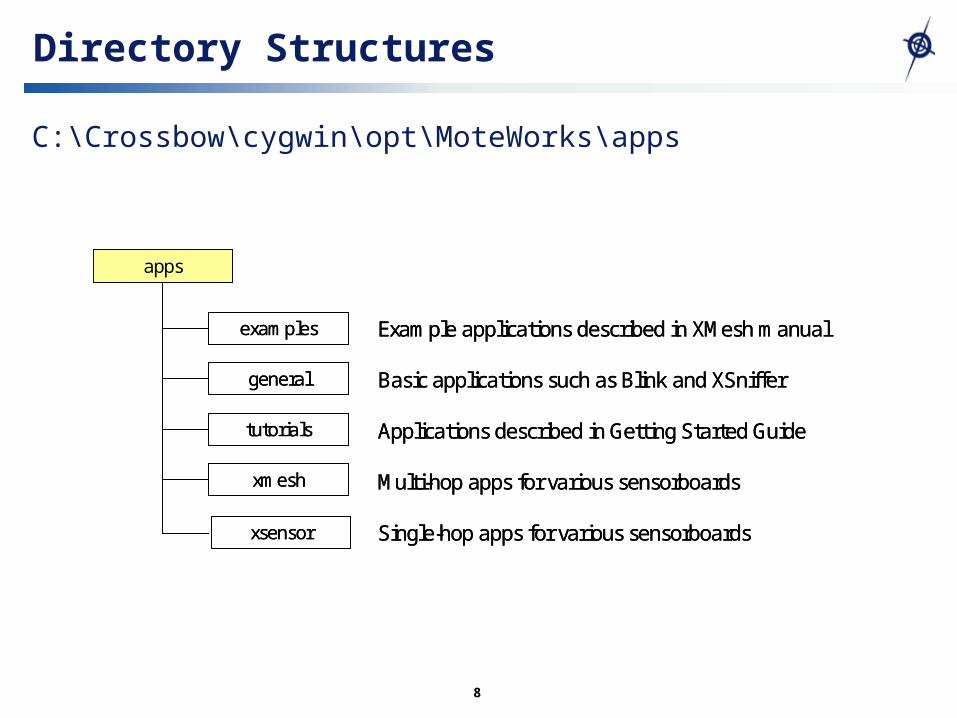
C:\Crossbow\cygwin\opt\MoteWorks\apps
apps
examples
general
tutorials
xmesh
Example applications described in XMesh manual
Basic applications such as Blink and XSniffer
Applications described in Getting Started Guide
Multi-hop apps for various sensorboards
Single-hop apps for various sensorboardsxsensor
apps
examples
general
tutorials
xmesh
Example applications described in XMesh manual
Basic applications such as Blink and XSniffer
Applications described in Getting Started Guide
Multi-hop apps for various sensorboards
Single-hop apps for various sensorboardsxsensor
9
Directory Structures
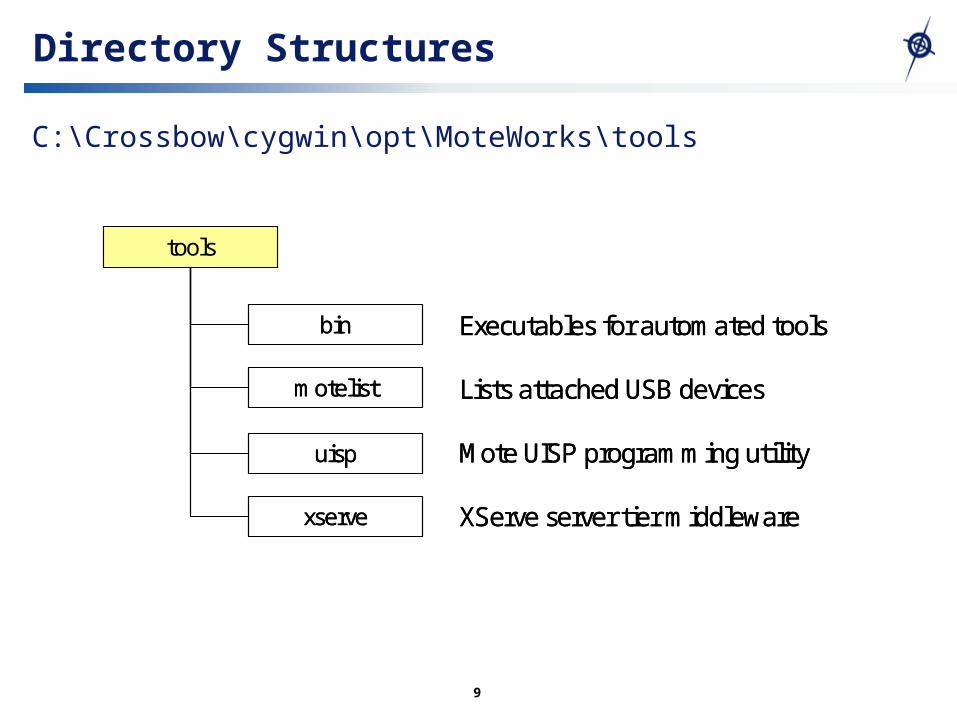
C:\Crossbow\cygwin\opt\MoteWorks\tools
tools
bin
motelist
uisp
xserve
Executables for automated tools
Lists attached USB devices
Mote UISP programming utility
XServe server tier middleware
tools
bin
motelist
uisp
xserve
Executables for automated tools
Lists attached USB devices
Mote UISP programming utility
XServe server tier middleware
10
Directory Structures
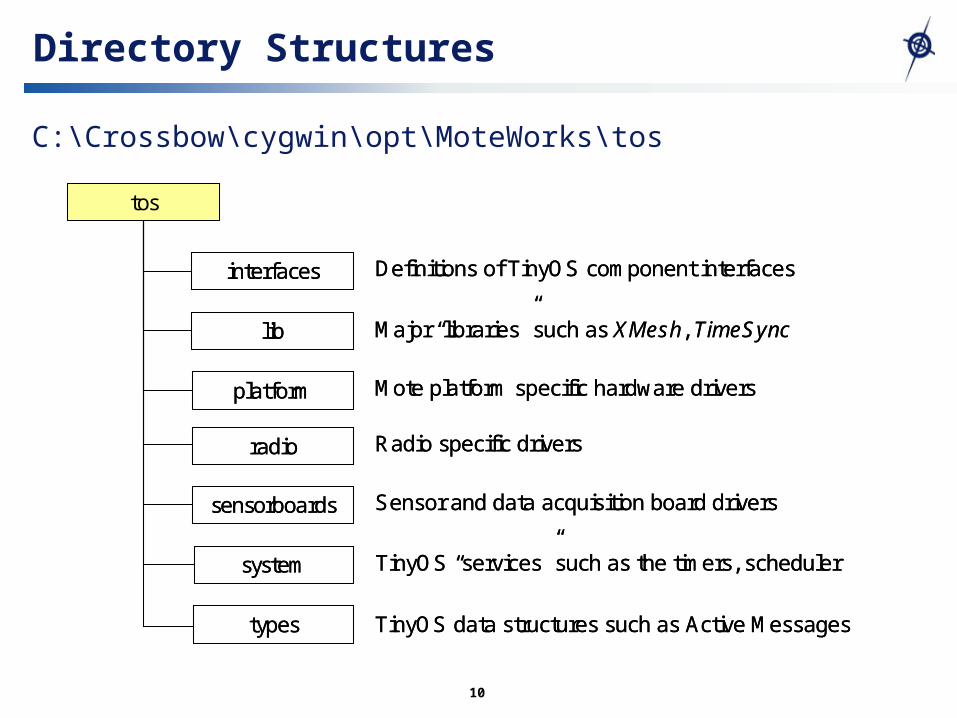
C:\Crossbow\cygwin\opt\MoteWorks\tos
tos
interfaces
lib
platform
sensorboards
system
Definitions of TinyOS component interfaces
Major “libraries” such as XMesh, TimeSync
Mote platform specific hardware drivers
Sensor and data acquisition board drivers
TinyOS “services” such as the timers, scheduler
types TinyOS data structures such as Active Messages
radio Radio specific drivers
tos
interfaces
lib
platform
sensorboards
system
Definitions of TinyOS component interfaces
Major “libraries” such as XMesh, TimeSync
Mote platform specific hardware drivers
Sensor and data acquisition board drivers
TinyOS “services” such as the timers, scheduler
types TinyOS data structures such as Active Messages
radio Radio specific drivers
Feb 2007WSN Training: MW Orientation and Configuration 11
MoteWorks Orientation
Objectives Review directory structure MakeXbowlocal and environment customization
Lab Blink make command Compiling using Cygwin or Programmer’s Notepad
12
Customization: MakeXbowlocal
What is MakeXbowlocal? A file that contains common settings to minimize
keyboard entry and typos during compiling and downloading
What will be used to edit the MakeXbowlocal file? Programmers Notepad 2
Where is it? <Install_Drive>:\Crossbow\cygwin\opt\MoteWorks\apps
Open a Programmers Notepad 2 window now
13
Customization: MakeXbowlocal
What can be defined in MakeXbowlocal?1. Programming board settings
COM port (MIB510 or MIB520) or IP address (MIB600) of the programming board
2. Radio settings Frequency band AND channel Radio transmit (TX) output power
3. Group ID Nodes must share a common group ID in order to
network with each other
14
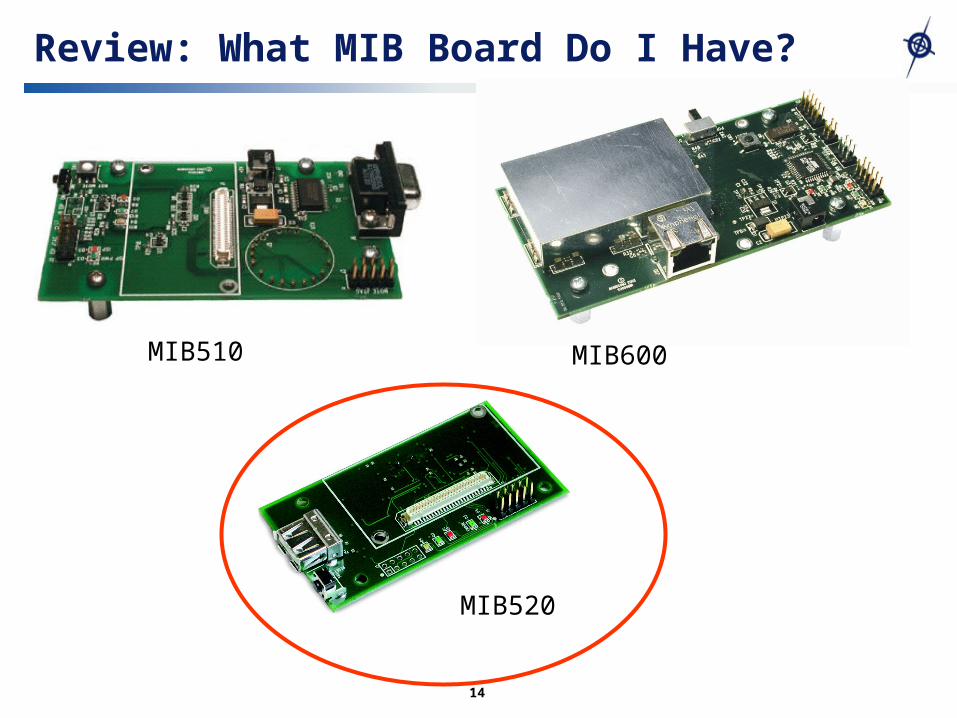
Review: What MIB Board Do I Have?
MIB520
MIB600MIB510
15
MakeXbowlocal: Programming Board
1.Uncomment one of the following lines Line 14 if using a MIB510 Line 15 if using a MIB520 Line 16 if using a MIB600 (a.k.a., eprb)
2.Uncomment and edit for COM port of the MIB510/MIB520 or IP address of the MIB600
16
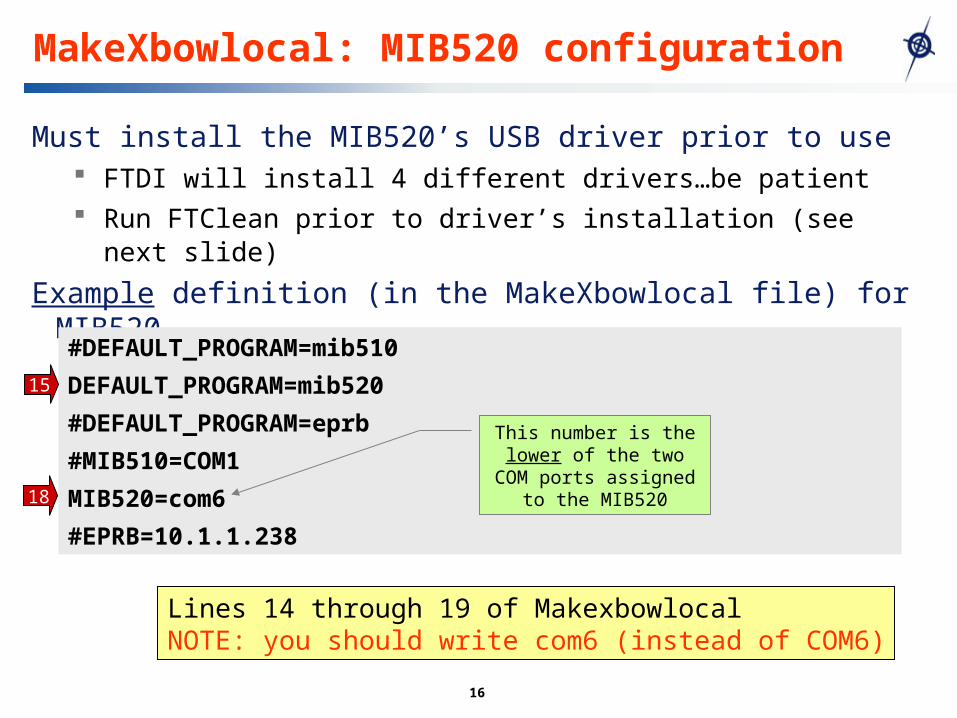
MakeXbowlocal: MIB520 configuration
Must install the MIB520’s USB driver prior to use FTDI will install 4 different drivers…be patient Run FTClean prior to driver’s installation (see next slide)
Example definition (in the MakeXbowlocal file) for MIB520
#DEFAULT_PROGRAM=mib510
DEFAULT_PROGRAM=mib520
#DEFAULT_PROGRAM=eprb
#MIB510=COM1
MIB520=com6
#EPRB=10.1.1.238
Lines 14 through 19 of MakexbowlocalNOTE: you should write com6 (instead of COM6)
15
18
This number is the lower of the two COM ports assigned to the
MIB520
17
MIB520 Notes (Review)
USB port drivers (from FTDI) are in the MoteWorks CD
The MIB520 USB drivers creates two sequentially numbered virtual COM ports COM<#> is for programming and downloading
code in the Mote COM<#+1> is for PC to MIB520 data
communications such as when running MoteView
If the USB driver installed virtual COM port drivers greater than 16, you should uninstall and clean the COM port registries Use the FTClean utility on the MoteWorks CD
18
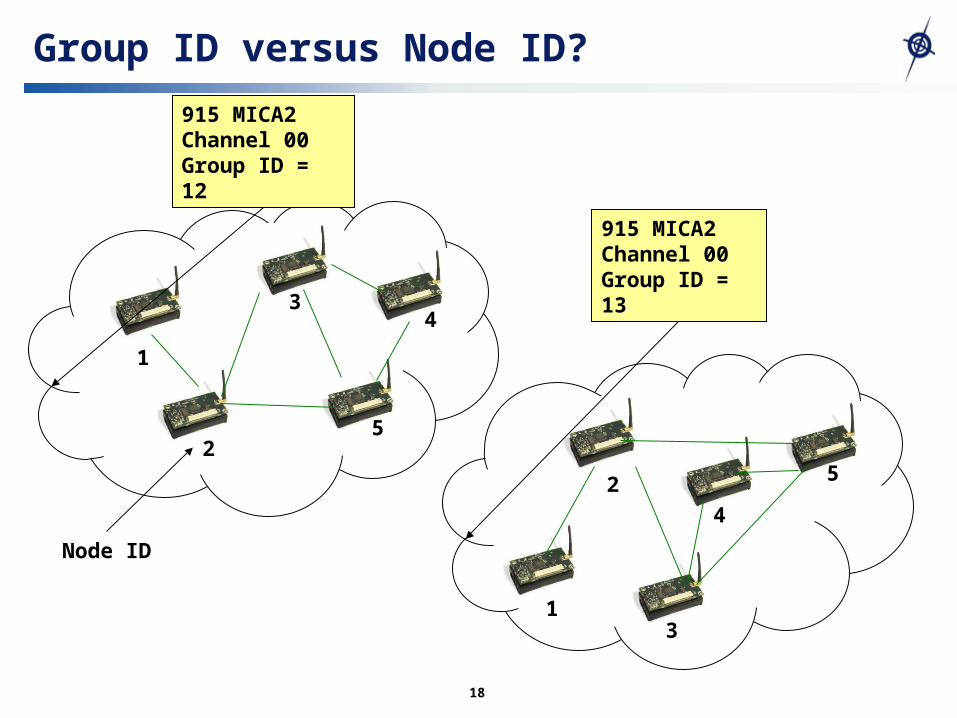
Group ID versus Node ID?
915 MICA2Channel 00 Group ID = 12
915 MICA2Channel 00 Group ID = 13
1
2
34
5
5
4
3
2
1
Node ID
19
MakeXbowlocal: Group and Node IDs
Nodes communicate only within a common group ID Values can be in either decimal or hexadecimal Default value is 0x7D (that is, decimal 125)
Nodes can be assigned almost any 2-byte number (that is, from 0 to 65535)
Exceptions: Don’t use the reserved broadcast or node addresses Broadcast: 0xFFFF (65535) UART Channel: 0x007E (126)
20
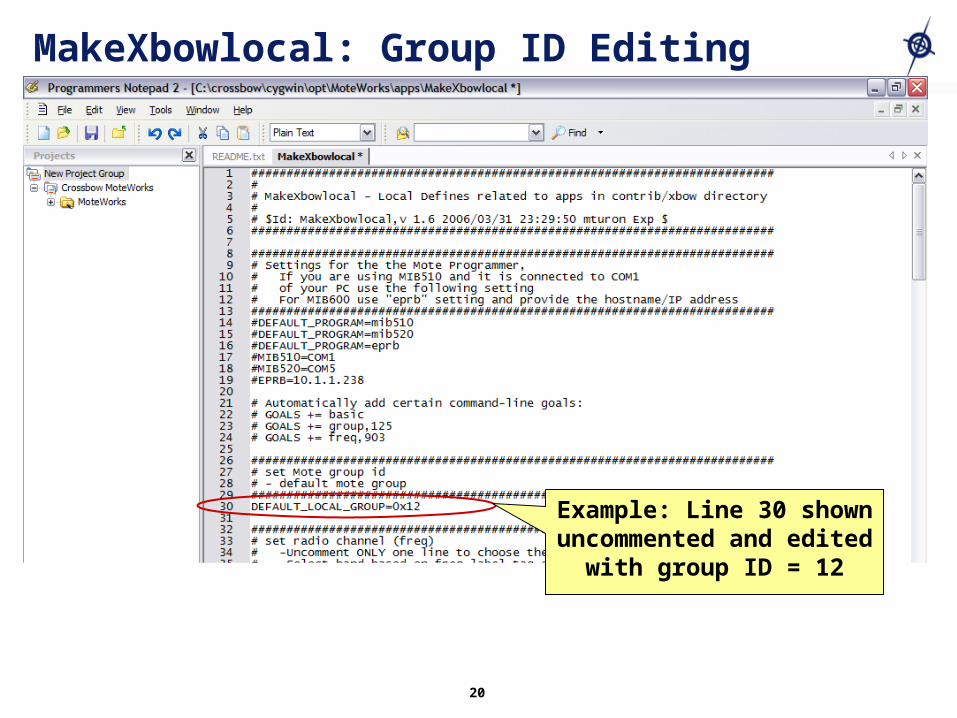
MakeXbowlocal: Group ID Editing
Example: Line 30 shown uncommented and edited
with group ID = 12
21
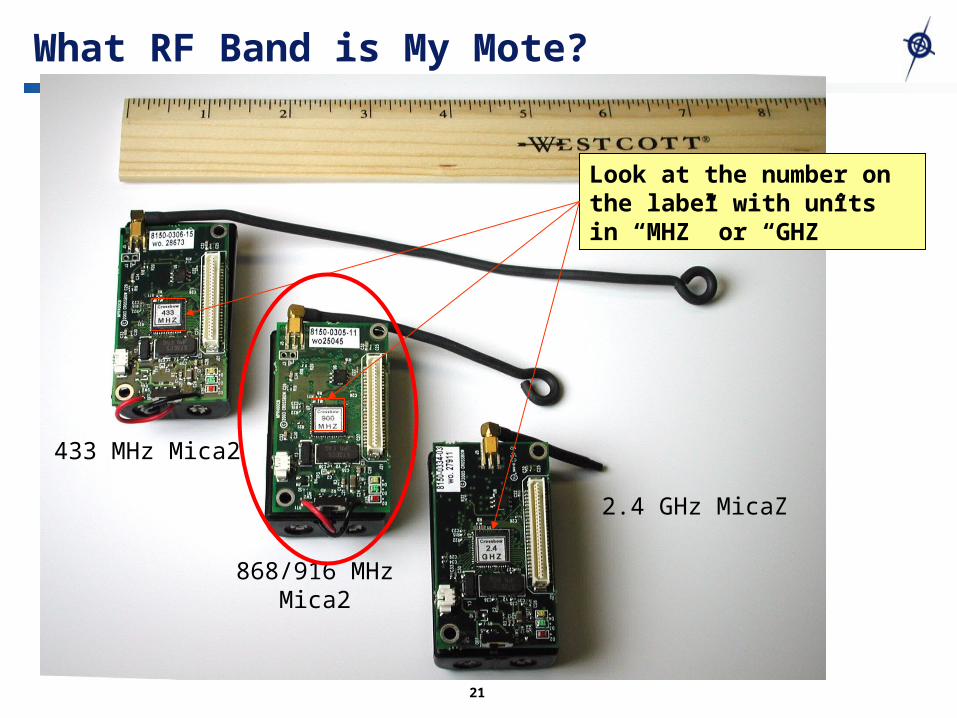
What RF Band is My Mote?
Look at the number on the label with units in “MHZ” or “GHZ”
433 MHz Mica2
868/916 MHz Mica2
2.4 GHz MicaZ
22
Editing the Makexbowlocal File (2 of 2)
For MICA2 users, check three settings1. RADIO_CLASS and RADIO_CHANNEL
Uncomment one of 55, 93, 110, or 128
2. RADIO_CHANNEL Uncomment one of the RADIO_CHANNEL lines in the
appropriate RADIO_CLASS section
3. Radio TX Power Uncomment one line between 153 and 158
23
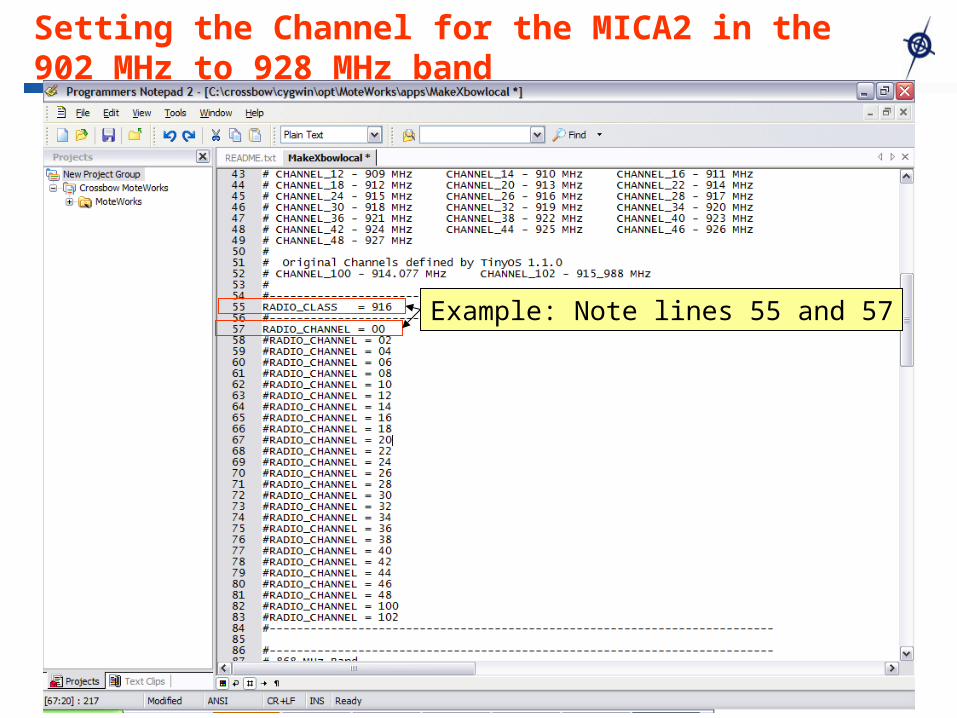
Example: Note lines 55 and 57
Setting the Channel for the MICA2 in the 902 MHz to 928 MHz band
24
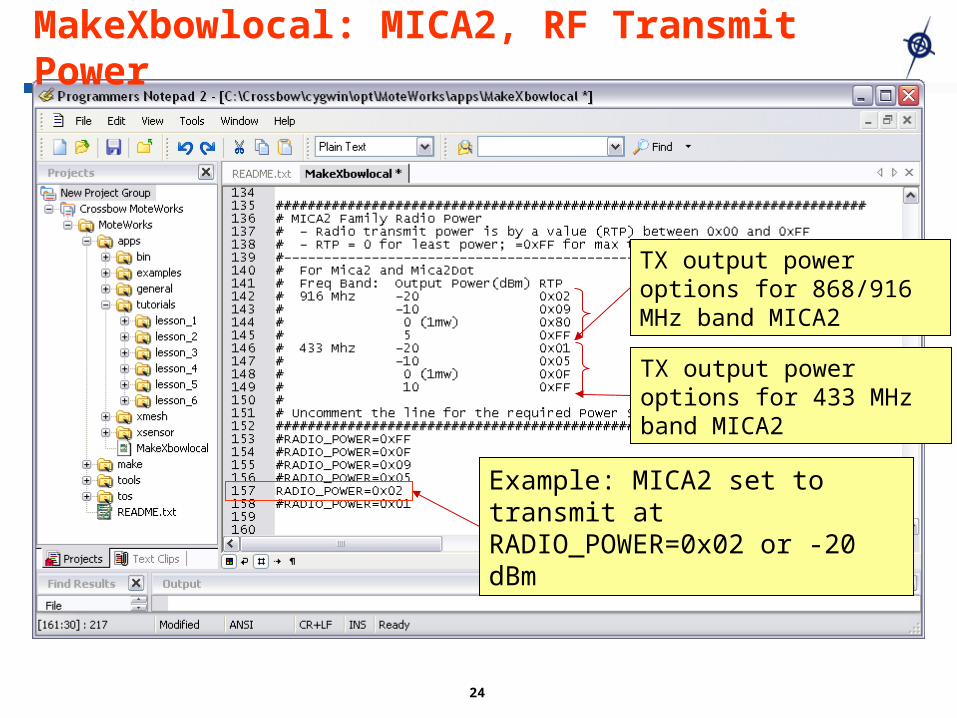
MakeXbowlocal: MICA2, RF Transmit Power
Example: MICA2 set to transmit at RADIO_POWER=0x02 or -20 dBm
TX output power options for 868/916 MHz band MICA2
TX output power options for 433 MHz band MICA2
25
Before We Go On
Make sure that the changes in the MakeXbowlocal file are based on your Group ID Type of Mote Interface Board (MIB510, MIB520,
or MIB600) COM port
Mote (Mica2 or MicaZ). RADIO CLASS, RF CHANNEL, TX POWER
All other lines else should be comment out with a # symbol
Feb 2007WSN Training: MW Orientation and Configuration 26
MoteWorks Orientation
Objectives Review directory structure MakeXbowlocal and environment customization
Lab Blink make command Compiling using Programmer’s Notepad 2 (PN2 on your
desktop)
Feb 2007WSN Training: MW Orientation and Configuration 27
Lab 1: Compile and Installing Firmware to a Mote
Objectives Build and install your first MoteWorks application Verify your MoteWorks compiler tools and
programming environment Get a little more familiar with the hardware
28
Lab 1 – Materials Needed
Mote (“MPR4x0” or “MPR2400”) One MICA2, MICAz with batteries installed
Mote Interface Board (“MIB”) One of MIB510, MIB520, or MIB600 All associated cabling for data and power IP or COM port settings determined Appropriate drivers installed (if needed)
Your PC with MoteWorks installed
29
Lab 1: Setup Gateway and Mote
1. Connect your MIB to your PC with the appropriate cabling. Check that the MIB is powered.
2. When using a MIB520, power is supplied from PC USB port. Turn the power switch on mote to OFF.
30
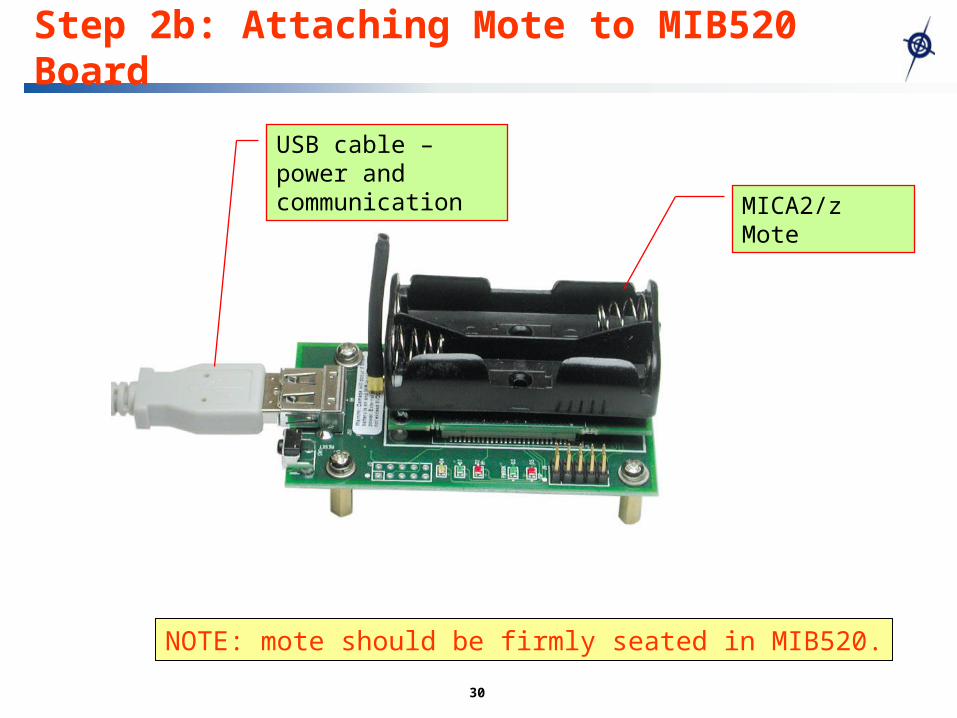
Step 2b: Attaching Mote to MIB520 Board
MICA2/z Mote
USB cable – power and communication
NOTE: mote should be firmly seated in MIB520.
31
Lab: Compile and Download with Programmers Notepad
3. Open a Programmers Notepad window and navigate to the Blink directory: /opt/MoteWorks/apps/general/Blink
4. Click on the Blink.nc or BlinkM.nc file
5. If MICA2: Select tools > make mica2
6. To install, click on tools > shell. In the dialog box type
make <platform> reinstall <platform> is either mica2 or micaz
32
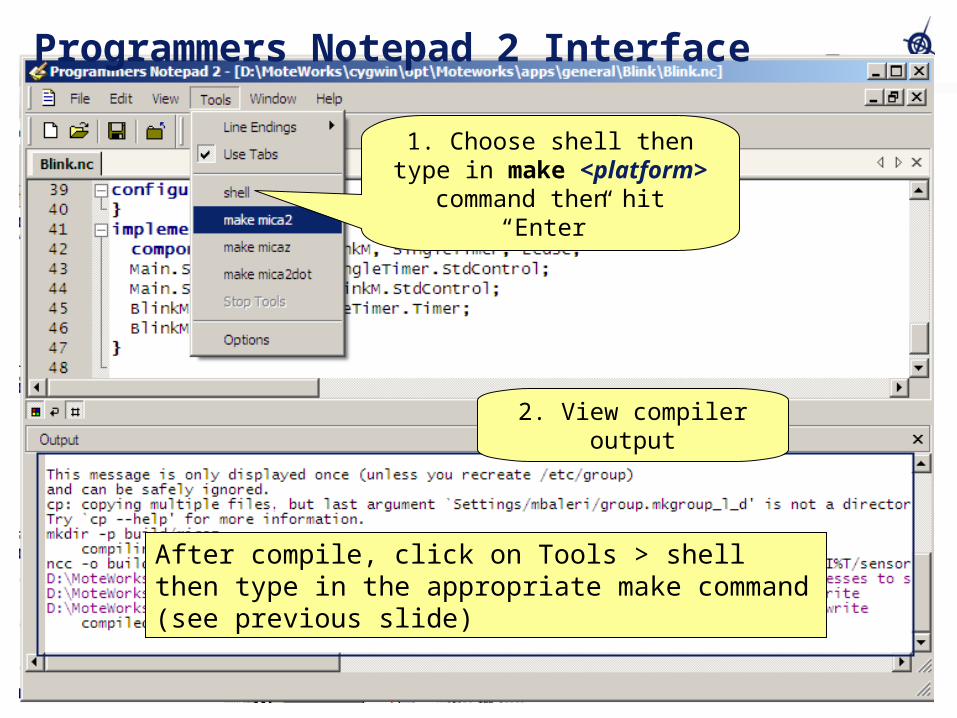
2. View compiler output
1. Choose shell then type in make <platform>
command then hit “Enter”
Programmers Notepad 2 Interface
After compile, click on Tools > shell then type in the appropriate make command (see previous slide)

33
TinyOS make Command (1 of 3)
To build an TinyOS application we use make to Configure top-level nesC application with user specific
options To find options and their syntax, look under the C:\
Crossbow\cygwin\opt\MoteWorks\make\avr subdirectory Run the nesC precompiler to convert nesC
configurations and modules to C. Compile C code to executable binary for target platform Install code into Mote
The make command can be typed or issued from Programmers Notepad 2 Can also be issued from the same location within a
Cygwin window
34
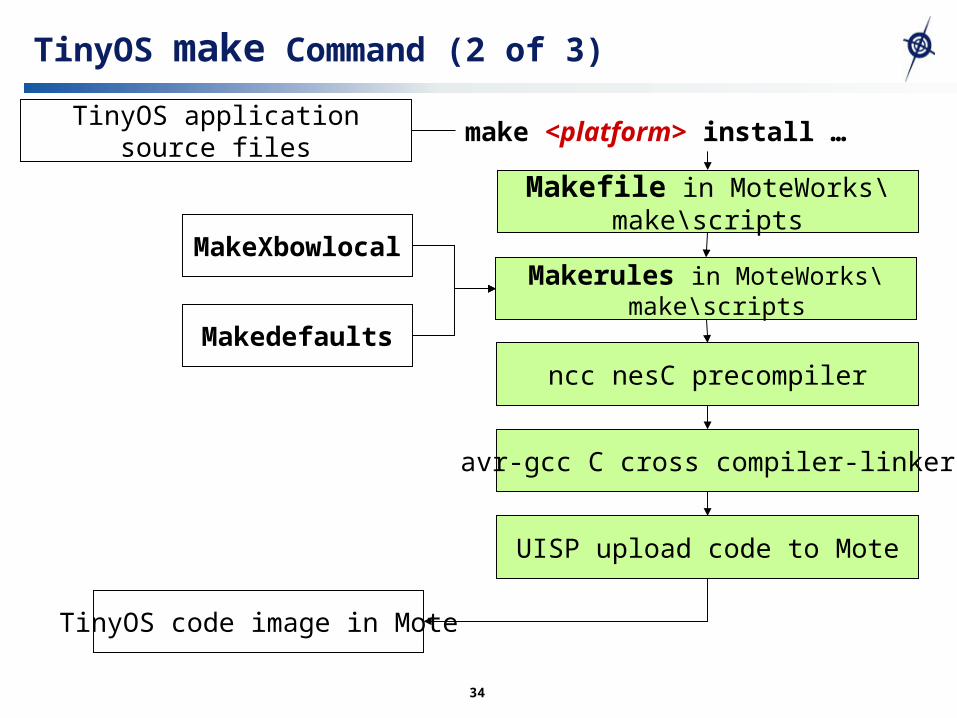
TinyOS make Command (2 of 3)
Makefile in MoteWorks\make\scripts
Makerules in MoteWorks\make\scripts
MakeXbowlocal
ncc nesC precompiler
avr-gcc C cross compiler-linker
UISP upload code to Mote
TinyOS code image in Mote
TinyOS application source files
make <platform> install …
Makedefaults
35
TinyOS make Command (3 of 3)
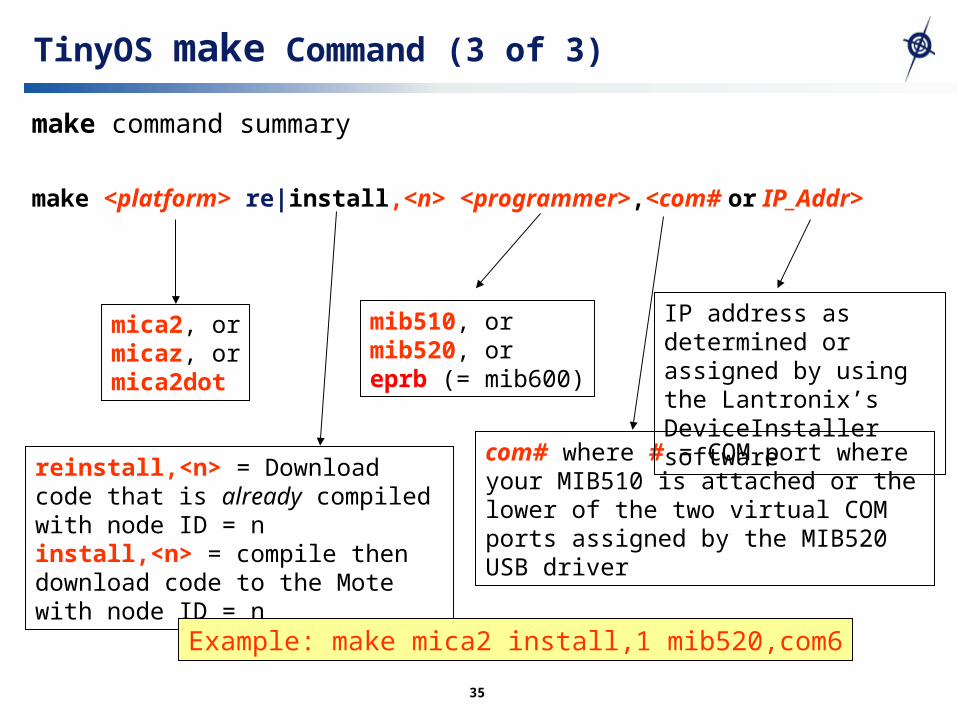
make command summary
make <platform> re|install,<n> <programmer>,<com# or IP_Addr>
mica2, ormicaz, ormica2dot
mib510, ormib520, oreprb (= mib600)
com# where # = COM port where your MIB510 is attached or the lower of the two virtual COM ports assigned by the MIB520 USB driver
IP address as determined or assigned by using the Lantronix’s DeviceInstaller softwarereinstall,<n> = Download code
that is already compiled with node ID = ninstall,<n> = compile then download code to the Mote with node ID = n
Example: make mica2 install,1 mib520,com6
36
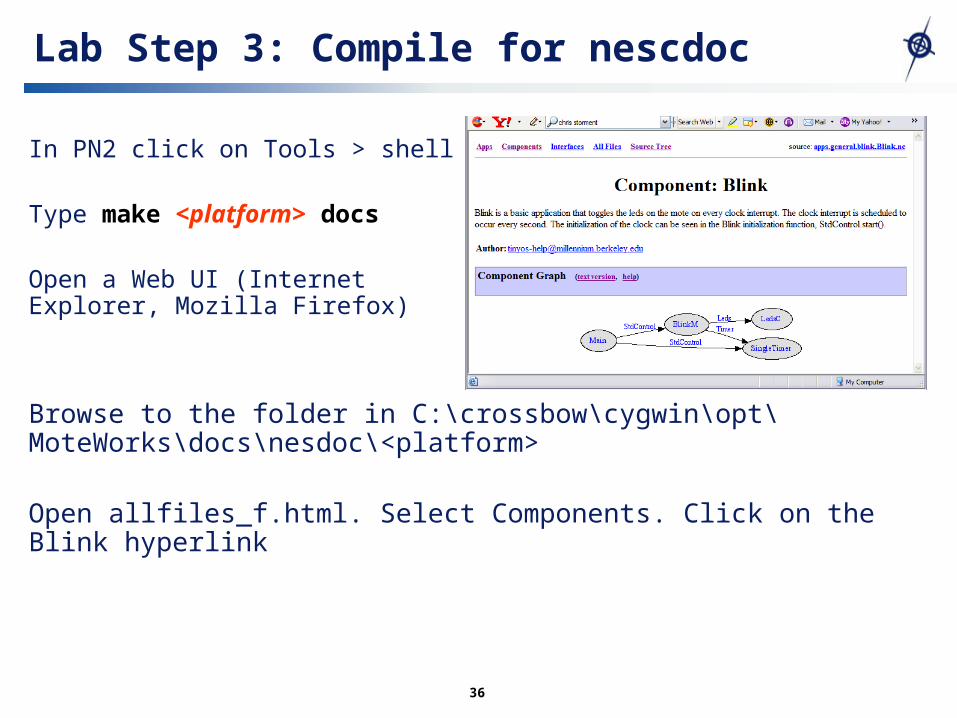
Lab Step 3: Compile for nescdoc
In PN2 click on Tools > shell
Type make <platform> docs
Open a Web UI (Internet Explorer, Mozilla Firefox)
Browse to the folder in C:\crossbow\cygwin\opt\MoteWorks\docs\nesdoc\<platform>
Open allfiles_f.html. Select Components. Click on the Blink hyperlink
37
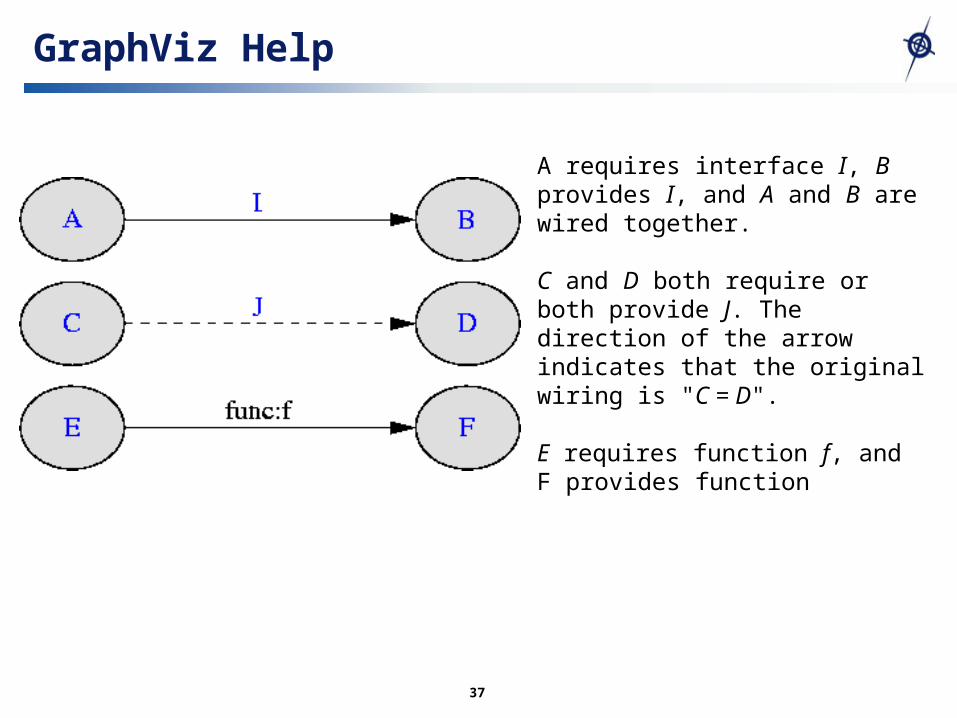
GraphViz Help
A requires interface I, B provides I, and A and B are wired together.
C and D both require or both provide J. The direction of the arrow indicates that the original wiring is "C = D".
E requires function f, and F provides function
38
What you need to do
Familiarize yourself with hardware Review directory structure of MoteWorks Familiarize yourself with Programmers Notepad Using Programmer’s Notepad to
Customize MakeXbowlocal (use the same PC for the rest of the semester)
Compile & download Blink Make sure Blink works
Finish lab1 report