11 fem 2d numerical integration & isoparametric elements · numerical modeling of rock...
TRANSCRIPT

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Numerical modeling of rock deformation:
11 FEM 2D numerical integration & isoparametric elements
Stefan [email protected]
NO E61
AS2009, Thursday 10-12, NO D 11

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Repetition• In the last lectures we learned the basic principles how to transform a system
of partial differential equations (PDE’s) into a system of linear equations using the finite element method (FEM).
• In the FEM, the PDE’s are approximated as linear equations on the element level, i.e. a local stiffness matrix, K, and a local right hand side vector, F, are generated.
• The local matrix K
and vector F
are assembled into a global matrix Kg
and global vector Fg
which form the linear system of equations describing the physical process in the model domain, i.e. Kg
u
= Fg. The vector u
is unknown and can be determined with Kg
and Fg.• Boundary and initial conditions are implemented separately. • The calculation of the components of K
and F
requires performing an integral over the element and performing derivatives of the element shape functions. These integrals can be done analytically for simple and constant element geometries, what we have done so far. If we deform the elements we have to apply numerical integration and we have to correct the derivatives due to the deformation. How to do this is the topic of this lecture.

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
4 node element2 2
2 2
( , , ) ( , , ) ( , , ) 0T x y t T x y t T x y t st x y
1
21 2 3 4
3
4
( , ) ( , ) ( , ) ( , ) ( , )
TT
T x y N x y N x y N x y N x yTT
TN T
1
2
3
4
( , )
( , )
( , )
( , )
dx x dy yN x y
dxdyx dy y
N x ydxdy
xyN x ydxdydx x y
N x ydxdy

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
4 node element
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points
1
2
3
4
( , )
( , )
( , )
( , )
dx x dy yN x y
dxdyx dy y
N x ydxdy
xyN x ydxdydx x y
N x ydxdy
1
2
3
4
1( , ) 1 141( , ) 1 141( , ) 1 141( , ) 1 14
N
N
N
N

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
RepetitionThe 2D temperature diffusion equation is:
0t
M T KT-F
0old
old
tot tot
dt
dt dt
T TM KT-F
M K T F TK T F
2 2
2 2
( , , ) ( , , ) ( , , ) 0T x y t T x y t T x y t st x y
0T T
Tdxdy dxdy sdxdyt x x y y
T N N N NNN T N
The corresponding weak form is:
The general matrix form is:

Numerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
RepetitionUntil now we did the integrations analytically with Maple and
copy-pasted the result matrices into our Matlab script.for i from 1 to nonel do
Eq_weak[i] :=int(int(kappa*(diff(T,x)*diff(N[i],x)+diff(T,y)*diff(N[i],y))+Q*N[i],x=0..dx),y=0..dy):
Eq_weak_t[i]:=int(int( (Tdot)*N[i] ,x=0..dx),y=0..dy):
od:
A =[-2/3*kappa/dx*dy-2/3*kappa*dx/dy+kappa*(1/(dx^2)+1/(dy^2))*dx*dy -1/3*kappa/dx*dy+1/6*kappa*dx/dy -1/6*kappa/dx*dy- 1/6*kappa*dx/dy 1/6*kappa/dx*dy-1/3*kappa*dx/dy;...
-1/3*kappa/dx*dy+1/6*kappa*dx/dy 1/3*kappa/dx*dy+1/3*kappa*dx/dy 1/6*kappa/dx*dy-1/3*kappa*dx/dy -1/6*kappa/dx*dy- 1/6*kappa*dx/dy;...
-1/6*kappa/dx*dy-1/6*kappa*dx/dy 1/6*kappa/dx*dy-1/3*kappa*dx/dy 1/3*kappa/dx*dy+1/3*kappa*dx/dy - 1/3*kappa/dx*dy+1/6*kappa*dx/dy;...
1/6*kappa/dx*dy-1/3*kappa*dx/dy -1/6*kappa/dx*dy-1/6*kappa*dx/dy -1/3*kappa/dx*dy+1/6*kappa*dx/dy 1/3*kappa/dx*dy+1/3*kappa*dx/dy];
2 dy3 dx
2 dx3 dy
1
dx21
dy2dx dy
dy3 dx
dx6 dy
dy6 dx
dx6 dy
dy6 dx
dx3 dy
dy3 dx
dx6 dy
dy3 dx
dx3 dy
dy6 dx
dx3 dy
dy6 dx
dx6 dy
dy6 dx
dx6 dy
dy6 dx
dx3 dy
dy3 dx
dx3 dy
dy3 dx
dx6 dy
dy6 dx
dx3 dy
dy6 dx
dx6 dy
dy3 dx
dx6 dy
dy3 dx
dx3 dy

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Motivation → Deformable Grid
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Motivation → Deformable Grid
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Motivation
Integral form of system of equations
1
1 10 01 1 1
0
i i i idx dx
i i
i ii i i i
N x N x N x N xu N xx x x x Adx Bdx
u N xN x N x N x N xx x x x
K u F 0
How do we solve these integrals on a distorted element?
NUMERICALLY !!!

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → General comments
Numerical integration with Gauss-Legendre- Quadrature only works on an idealized Element
For x = -1 to 1 in 1D
For x = -1 to 1 and y = -1 to 1 in 2D

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → For 1D
The function f only needs to be known at the integration points.

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → For 1D
Formula
1
11
nip
n nn
f d f w
The function f only needs to be known at the integration points.

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → For 1D
Formula
Integration points and weights
1
11
nip
n nn
f d f w
312201wnnn
13
3 3, 0 ,5 5 5 8 5, ,9 9 9
The function f only needs to be known at the integration points.

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
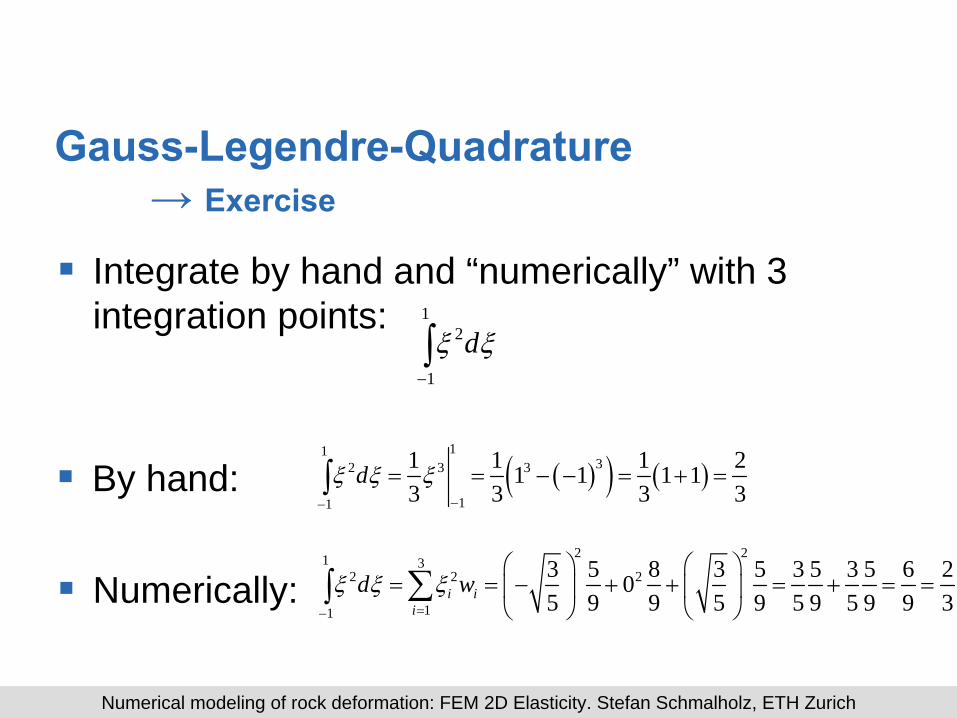
Gauss-Legendre-Quadrature → Exercise
12
1
d
Integrate by hand and “numerically” with 3 integration points:

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → Exercise
By hand:
12
1
d
11
32 3 3
11
1 1 1 21 1 1 13 3 3 3
d
Integrate by hand and “numerically” with 3 integration points:
NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → Exercise
By hand:
12
1
d
11
32 3 3
11
1 1 1 21 1 1 13 3 3 3
d
2 21 32 2 2
11
3 5 8 3 5 3 5 3 5 6 205 9 9 5 9 5 9 5 9 9 3i i
id w
Integrate by hand and “numerically” with 3 integration points:
Numerically:

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → For 2D
Formula
1 1
1 1 11 1
, , ,nipn n
i j i j n n ni j n
f d d f w w f w

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Gauss-Legendre-Quadrature → For 2D
Formula
Integration points are similar to the 1D case. Weights can be defined as a multiplicative combination of the 1D case
eg.
1 1
1 1 11 1
, , ,nipn n
i j i j n n ni j n
f d d f w w f w
1/ 3
1/ 31w
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
% local coordinates
points(1,1) = -sqrt(1/3); points(1,2) = -sqrt(1/3);
points(2,1) = sqrt(1/3); points(2,2) = -sqrt(1/3);
points(3,1) = sqrt(1/3); points(3,2) = sqrt(1/3);
points(4,1) = -sqrt(1/3); points(4,2) = sqrt(1/3);
weight = [1*1 1*1 1*1 1*1];
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points
Define coordinates of integration points

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points
0T T
Tdxdy dxdy sdxdyt x x y y
T N N N NNN T N
Numerical integration
Numerical integration requires shape functions and their derivatives at the integration points.
1
1
1
1( , ) 1 14
( , ) 1 14
( , ) 1 14
N
N
N

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
-1
-1
1
1
0,0
++ +
+
1 2
34
Integration points
0T T
Tdxdy dxdy sdxdyt x x y y
T N N N NNN T N
% shape functionsN(:,1) = 1/4*(1-points(:,1)).*(1-points(:,2));N(:,2) = 1/4*(1+points(:,1)).*(1-points(:,2));N(:,3) = 1/4*(1+points(:,1)).*(1+points(:,2));N(:,4) = 1/4*(1-points(:,1)).*(1+points(:,2));
% derivatives of shape functionsDN_BIG = [];for i = 1:no_intp
DN(1,1) = 1/4*(-1 +points(i,2));DN(2,1) = 1/4*(-1 +points(i,1));DN(1,2) = 1/4*( 1 -points(i,2));DN(2,2) = 1/4*(-1 -points(i,1));DN(1,3) = 1/4*( 1 +points(i,2));DN(2,3) = 1/4*( 1 +points(i,1));DN(1,4) = 1/4*(-1 -points(i,2));DN(2,4) = 1/4*( 1 -points(i,1));
DN_BIG(:,:,i) = DN;end
Define shape functions and their derivatives at integration points

NumModRockDef 09 – Numerical IntegrationNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
for iel = 1:no_el % loop over elements and fill global matricesNODES = g_num(:,iel); % extract nodes of elementCOORD = GLOB_COORD(:,NODES); % calculate the coordinates of the nodes
% initialize local matricesMM = zeros(dof_perel,dof_perel);KM = zeros(dof_perel,dof_perel);F = zeros(dof_perel,1); % element vector
for i = 1:no_intp % loop over integration points of elementjacobi = DN_BIG(:,:,i)*COORD'; % Jacobi matrix, used for coordinate transformationinvjacobi = inv(jacobi); % inverse of Jacobidetjacobi = det(jacobi); % determinante of JacobiDN_GLOBAL = invjacobi*DN_BIG(:,:,i); % derivatives of shape functions wrt global coordinates
% integrate locally, calculate element matricesMM = MM + N(i,:)'*N(i,:)*weight(i)*detjacobi;
KM = KM + DN_GLOBAL'*KAPPA*DN_GLOBAL*weight(i)*detjacobi;
KL = MM/dt + KM; % element stiffness matrix, left hand sideKR = MM/dt; % element stiffness matrix, right hand side
F(:) = F(:) + N(:,i)*s*weight(i)*detjacobi;end% sum to global matricesKL_G(g_num(:,iel),g_num(:,iel)) = KL_G(g_num(:,iel),g_num(:,iel)) + KL;KR_G(g_num(:,iel),g_num(:,iel)) = KR_G(g_num(:,iel),g_num(:,iel)) + KR;F_G(g_num(:,iel)) = F_G(g_num(:,iel)) + F;
end
Matlab code
1 1
1 1 11 1
, , ,nipn n
i j i j n n ni j n
f d d f w w f w

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Motivation → Gauss-Legendre-Quadrature
Numerical integration with Gauss-Legendre-Quadrature only works on an idealized Element
For x = -1 to 1 in 1D
For x = -1 to 1 and y = -1 to 1 in 2D
So, it does not solve the problem of the distorted elements, yet.
A coordinate transformation from the distorted element to the idealized element is needed in addition. See next section.

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Isoparametric
element

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Distorted vs. idealized element

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Distorted vs. idealized element
1
1 10 01 1 1
0
i i i idx dx
i i
i ii i i i
N x N x N x N xu N xx x x x Adx Bdxu N xN x N x N x N x
x x x x
Derivatives of shape functions with respect to global coordinates
Integral form written in terms of global coordinates (dx)
Shape functions given in terms of local coordinates ()
Numerical integration only possible on a local coordinate system.
2D
1D: FEM introduction

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Two transformations are necessary
Transform locally defined derivatives of shape functions to global coordinate system
Transform locally performed (numerical) integration to global coordinates

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 1D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x arbitrary
Derivatives of shape functions wanted here
Local isoparametric element
Coordinate from -1 to 1
Shape functions defined here
Derivatives of shape functions determinable here

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 1D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x arbitrary
Derivatives of shape functions wanted here
Definition of Jacobian
Local isoparametric element
Coordinate from -1 to 1
Shape functions defined here
Derivatives of shape functions determinable here
1
2
3
NNN
Nx
x x
J
1
x
J
1
2
3
N
N
N
N

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 1D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x arbitrary
Derivatives of shape functions wanted here
Definition of Jacobian
Local isoparametric element
Coordinate from -1 to 1
Shape functions defined here
Derivatives of shape functions determinable here
1
2
3
NNN
Nx
x x
J
1
x
J
1
2
3
N
N
N
N

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
131 2
2
3
, ,T
xNx N N x
x
NJ x
First transformation in 1D → Derivatives of shape fcts. from local to
global
How to derive the Jacobian in a FEM manner?
Definition
With the FEM approximation quantities can be interpolated from nodal points to every point in the element. Why not also the coordinates?
So
x
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
131 2
2
3
, ,T
xNx N N x
x
NJ x
First transformation in 1D → Derivatives of shape fcts. from local to
global
How to derive the Jacobian in a FEM manner?
Definition
With the FEM approximation quantities can be interpolated from nodal points to every point in the element. Why not also the coordinates?
So
x
J
Isoparametricelement

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
for iel = 1:no_el % loop over elements and fill global matricesNODES = g_num(:,iel); % extract nodes of elementCOORD = GLOB_COORD(:,NODES); % calculate the coordinates of the nodes
% initialize local matricesMM = zeros(dof_perel,dof_perel);KM = zeros(dof_perel,dof_perel);F = zeros(dof_perel,1); % element vector
for i = 1:no_intp % loop over integration points of elementjacobi = DN_BIG(:,:,i)*COORD'; % Jacobi matrix, used for coordinate transformationinvjacobi = inv(jacobi); % inverse of Jacobidetjacobi = det(jacobi); % determinante of JacobiDN_GLOBAL = invjacobi*DN_BIG(:,:,i); % derivatives of shape functions wrt global coordinates
% integrate locally, calculate element matricesMM = MM + N(i,:)'*N(i,:)*weight(i)*detjacobi;
KM = KM + DN_GLOBAL'*KAPPA*DN_GLOBAL*weight(i)*detjacobi;
KL = MM/dt + KM; % element stiffness matrix, left hand sideKR = MM/dt; % element stiffness matrix, right hand side
F(:) = F(:) + N(:,i)*s*weight(i)*detjacobi;end% sum to global matricesKL_G(g_num(:,iel),g_num(:,iel)) = KL_G(g_num(:,iel),g_num(:,iel)) + KL;KR_G(g_num(:,iel),g_num(:,iel)) = KR_G(g_num(:,iel),g_num(:,iel)) + KR;F_G(g_num(:,iel)) = F_G(g_num(:,iel)) + F;
end
Matlab code
131 2
2
3
, ,T
xNx N N x
x
NJ x
1
x
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
x
J
Second transformation in 1D → Integration form from local to global
Global distorted element
Coordinate x arbitrary
Integral form of system of equations given here
Local isoparametric element
Coordinate from -1 to 1
Numerical integration performed here
Transformation of integration boundaries from local to global coordinates
2
1
1
1
detx
x
f x dx f d
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
x
J
Second transformation in 1D → Integration form from local to global
Global distorted element
Coordinate x arbitrary
Integral form of system of equations given here
Local isoparametric element
Coordinate from -1 to 1
Numerical integration performed here
Transformation of integration boundaries from local to global coordinates
2
1
1
1
detx
x
f x dx f d
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
for iel = 1:no_el % loop over elements and fill global matricesNODES = g_num(:,iel); % extract nodes of elementCOORD = GLOB_COORD(:,NODES); % calculate the coordinates of the nodes
% initialize local matricesMM = zeros(dof_perel,dof_perel);KM = zeros(dof_perel,dof_perel);F = zeros(dof_perel,1); % element vector
for i = 1:no_intp % loop over integration points of elementjacobi = DN_BIG(:,:,i)*COORD'; % Jacobi matrix, used for coordinate transformationinvjacobi = inv(jacobi); % inverse of Jacobidetjacobi = det(jacobi); % determinante of JacobiDN_GLOBAL = invjacobi*DN_BIG(:,:,i); % derivatives of shape functions wrt global coordinates
% integrate locally, calculate element matricesMM = MM + N(i,:)'*N(i,:)*weight(i)*detjacobi;
KM = KM + DN_GLOBAL'*KAPPA*DN_GLOBAL*weight(i)*detjacobi;
KL = MM/dt + KM; % element stiffness matrix, left hand sideKR = MM/dt; % element stiffness matrix, right hand side
F(:) = F(:) + N(:,i)*s*weight(i)*detjacobi;end% sum to global matricesKL_G(g_num(:,iel),g_num(:,iel)) = KL_G(g_num(:,iel),g_num(:,iel)) + KL;KR_G(g_num(:,iel),g_num(:,iel)) = KR_G(g_num(:,iel),g_num(:,iel)) + KR;F_G(g_num(:,iel)) = F_G(g_num(:,iel)) + F;
end
Matlab code
2
1
1
1
detx
x
f x dx f d
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 2D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x and y arbitrary
Derivatives of shape functions wanted here
Local isoparametric element
Coordinate and from -1 to 1
Shape functions and their derivatives defined here

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 2D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x and y arbitrary
Derivatives of shape functions wanted here
Definition of Jacobian
Local isoparametric element
Coordinate and from -1 to 1
Shape functions and their derivatives defined here
1
2
9
,,
,...
,
NN
N
Nyx
x xy x y y
J
1x
y
J
1 1
2 2
9 9
, ,
, ,
... ..., ,
N N
N N
N N
, , N

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
First transformation in 2D → Derivatives of shape fcts. from local to
global
Global distorted element
Coordinate x and y arbitrary
Derivatives of shape functions wanted here
Definition of Jacobian
Local isoparametric element
Coordinate and from -1 to 1
Shape functions and their derivatives defined here
1
2
9
,,
,...
,
NN
N
Nyx
x xy x y y
J
1x
y
J
1 1
2 2
9 9
, ,
, ,
... ..., ,
N N
N N
N N
, , N

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
11 2 9
2,
1 2 9
9
, , ,...
,..., , ,
...
T
xN N Nyxx
y N N Nxx
J N x
First transformation in 2D → Derivatives of shape fcts. from local to
global
Derivation of the Jacobian in a FEM manner!
Definition
So
yx
y x
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Second transformation in 2D → Integration form from local to global
Global distorted element
Coordinate x and y arbitrary
Integral form of system of equations given here
Local isoparametric element
Coordinate and from -1 to 1
Numerical integration performed here
Transformation of integration boundaries from local to global coordinates
2 2
1 1
1 1
1 1
, , detx y
x y
f x y dxdy f d d
J
yx
y x
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
Second transformation in 2D → Integration form from local to global
Global distorted element
Coordinate x and y arbitrary
Integral form of system of equations given here
Local isoparametric element
Coordinate and from -1 to 1
Numerical integration performed here
Transformation of integration boundaries from local to global coordinates
2 2
1 1
1 1
1 1
, , detx y
x y
f x y dxdy f d d
J
yx
y x
J

NumModRockDefNumerical modeling of rock deformation: FEM 2D Elasticity. Stefan Schmalholz, ETH Zurich
for iel = 1:no_el % loop over elements and fill global matricesNODES = g_num(:,iel); % extract nodes of elementCOORD = GLOB_COORD(:,NODES); % calculate the coordinates of the nodes
% initialize local matricesMM = zeros(dof_perel,dof_perel);KM = zeros(dof_perel,dof_perel);F = zeros(dof_perel,1); % element vector
for i = 1:no_intp % loop over integration points of elementjacobi = DN_BIG(:,:,i)*COORD'; % Jacobi matrix, used for coordinate transformationinvjacobi = inv(jacobi); % inverse of Jacobidetjacobi = det(jacobi); % determinante of JacobiDN_GLOBAL = invjacobi*DN_BIG(:,:,i); % derivatives of shape functions wrt global coordinates
% integrate locally, calculate element matricesMM = MM + N(i,:)'*N(i,:)*weight(i)*detjacobi;
KM = KM + DN_GLOBAL'*KAPPA*DN_GLOBAL*weight(i)*detjacobi;
KL = MM/dt + KM; % element stiffness matrix, left hand sideKR = MM/dt; % element stiffness matrix, right hand side
F(:) = F(:) + N(:,i)*s*weight(i)*detjacobi;end% sum to global matricesKL_G(g_num(:,iel),g_num(:,iel)) = KL_G(g_num(:,iel),g_num(:,iel)) + KL;KR_G(g_num(:,iel),g_num(:,iel)) = KR_G(g_num(:,iel),g_num(:,iel)) + KR;F_G(g_num(:,iel)) = F_G(g_num(:,iel)) + F;
end
1 1
1 1 11 1
, , ,nipn n
i j i j n n ni j n
f d d f w w f w
Matlab code
2 2
1 1
1 1
1 1
, , detx y
x y
f x y dxdy f d d
J