1333690 b630-klar---kopia
TRANSCRIPT


UNIVERSITY OF GOTHENBURG Department of Earth Sciences Geovetarcentrum/Earth Science Centre ISSN 1400-3821 B630
Master of Science (Two Years) thesis Göteborg 2011
Mailing address Address Telephone Telefax Geovetarcentrum Geovetarcentrum Geovetarcentrum 031-786 19 56 031-786 19 86 Göteborg University S 405 30 Göteborg Guldhedsgatan 5A S-405 30 Göteborg SWEDEN
Stratigraphic boundaries determined by P-wave and S-wave refraction surveys in the Göta Älv
valley at Hjärtum, Lilla Edet municipality
Linn Karlsson

Stratigraphic boundaries determined by P-wave and S-wave refraction surveys in the
Göta Älv valley at Hjärtum, Lilla Edet municipality
Linn Karlsson, Gothenburg University, Department of Earth Science: Geology, Box 460, SE- 405 30 Göteborg
Abstract
This master thesis presents an evaluation of seismic refraction S-wave and P-wave
geophysical data gathered next to Hjärtum in The Göta Älv valley in September 2010. The
investigated profile coincides with SGI`s erosion project: The Göta Älv commission, and
depth to interfaces data from their soundings were used as a reference. Models were created
using the softwares ReflexW, RayfractTM
, Surfer ®
and SIP. They all predict a four layer
stratigraphy consisting of: an artificially disturbed surface layer, clay, till and bedrock. All
models present similar shapes of interfaces. The P-wave models show the most credible result
based on comparisons with earlier investigations and the SGI soundings. The P-wave model
created in RayfractTM
shows the greatest accuracy of depth to the interface of clay- till
according to the sounding depths. S-wave models predict greater depths to interfaces
compared to the P-wave models and the SGI data. This is suggested to be a result of smaller
velocity differences between layers for S-waves than for P-waves. Another result of this thesis
is that depths to interfaces from the different software models are more similar at greater
depths. Finally, the sounding data and the seismic refraction models correspond very well
regarding the depth to the interfaces of clay-till. Most likely, these two surveys together
provide a correct thickness of the clay layer.
Keywords: Refraction seismic, S-wave, P-wave, ReflexW, Rayfract
TM, Surfer
®, SIP, SGI Göta Älv valley
commission
Sammanfattning
Denna masteruppsats presenterar en utvärdering av seismisk P-vågs och S-vågs refraktions
data, insamlad under två dagar i september 2010 på en åker utanför Hjärtum, i Götaälvdalen.
Den undersökta profilen sammanfaller med en av SGI:s linjer i erosionsprojektet ”Göta älv
uppdraget”, och deras sonderingsdjup till friktionsmaterial har använts som facit. Fem
modeller producerades med programmen ReflexW, RayfractTM
, Surfer ® och SIP. Alla
modellerna visar liknande form av lagergränserna och presenterar en fyra-lagers stratigrafi
bestående av; mänskligt stört ytlager, lera, morän och berggrund. Vid jämförelse av
modellerna visade P-vågsmodellerna störst trovärdighet jämfört med tidigare undersökningar
och SGIdata. P-vågmodellen skapad i Rayfract var den modell där lagergränsen lera-morän
med störst noggrannhet stämde överens med SGI:s sonderingsdata. S-vågsmodellerna visar
större djup till lagergränsen lera-morän än P-vågsmodellerna och SGIdata, troligtvis beroende
på mindre hastighetsskillnad mellan lagren än motsvarande P-vågslager. Ett annat resultat
från undersökningen är att positionen av lagergränserna i de olika modellerna stämmer bättre
överens desto djupare de ligger. Slutligen presenteras i rapporten att djupet till gränsen lera-
morän från sonderingarna och modellerna från refraktionsseismiken konfirmerar varandra,
och tillsammans presenterar de två metoderna en mycket trovärdig mäktighet av lerlagret.
Nyckelord: Refraktionsseismik, S-våg, P-våg, ReflexW, Rayfract
TM, Surfer
®, SIP, SGI Göta älv uppdraget
ISSN 1400-3821 B630 2011

2
Table of content
1. Introduction 3 1.1 Project description 3
1.2 Field location 3
1.3 Regional geology 4
1.4 SGI- Göta Älv valley Commission 6
2. Theory of geophysical methods 6 2.1 The seismic waves 6
2.2 Seismic wave velocities 7
2.3 Seismic refraction surveying 8
2.4 Seismic reflection surveying 10
2.5 Seismic surface wave surveying 10
3. Method 11 3.1 The field equipment and the software 11
3.2 In field 11
3.3 DGPS 14
3.4 Identifying the first arrival time 14
3.5 Modeling in SIP 14
3.6 Modeling in ReflexW 15
3.7 Modeling in Rayfract and Surfer 16
3.8 SGI data 18
4. Results and interpretations 18 4.1 SGI data 18
4.2 SIP 20
4.3 ReflexW 21 4.3.1 P-wave 21
4.3.2 S-wave 22
4.3.3 Velocity variations in the layers and boundary trends 23
4.4 Rayfract 26 4.4.1 P-wave 26
4.4.2 S-wave 26
4.5 Depth comparison 27
5. Discussion 29 5.1 P- vs. S-wave models 29
5.2 Bedrock 30
5.3 Comparison of the different software models 31
5.4 The stratigraphy 31
5.5 Till layer 31
5.6 Surface layer 33
5.7 Future work 33
6. Conclusion 34
7. Acknowledgement 34
8. References 35
Appendix 1-9 Detailed sounding logs from SGI


4
1.3 Regional geology
The bedrock of the area is dominated by crystalline gneissic, partly banded granitoids with
ages of 1.8-1.1 Ga, partly intruded by other rock types (Sveriges nationalatlas, 2002). The
area belongs to the Southwest Scandinavian domain, an area containing a complex
construction of deformed or/and metamorphosed (at some minor locations also new formed)
bedrock from the Sveconorwegian orogeny, about 1.15-0.90 Ga ago (Lindström et al., 2000).
The Göta Älv valley is crossed at several locations by the Göta Älv Shear zone, a tectonic
zone stretching from Lake Vänern to Kungsbacka. The depth to the bedrock in the Göta Älv,
in the area close to Hjärtum, varies between 30-60 meters (Dahlin et al., 2001).
The dominant surface sediment in the western part of Sweden is postglacial Quaternary
sediments. As the ice retreated from the west coast about 14 000-10 000 years ago the crust
was subsided as a result of the ice load. At this time a majority of the land mass was located
below sea level. Due to isostatic movement the crust rebounded and the sea level lowered
compared to the land area, resulting in an area placed above sea level. The most common
sediments along the west coast are marine clay, sand and gravel, (Lindström et al., 2000).
These types of sediments also characterize the Göta Älv valley, see the soil map in Fig. 2.
Fig 2. A soil map from SGU, illustrating the surface sediment in the field area. Most common are silt and clay
represented by the light yellow color, and bedrock represented by the red color.
The thickness of the clay is generally greater in the southern part of the Göta Älv, Gothenburg
area, compared to the northern parts. The sediments in the Göta Älv valley, close to Hjärtum,
mainly consist of glacial clay with postglacial deposits along the water brink. The central part
of the river´s bottom is covered by a 0.5m thick layer of recent medium-grained sand
(Klingberg et al., 2006). Due to the regression and transgression of the sea level and the ice
movement in the Quaternary ice age, several different environments existed during
deposition, resulting in a varied stratigraphy; see a generalized stratigraphy column from
Stevens and Hellgren (1990) in Fig. 3.

5
Fig 3. A generalized stratigraphic model for the Göta Älv valley (Stevens & Hellgren, 1990). S = sand, C = clay,
pf = plant fragments, si = silty, (si) = slightly silty, S sand lenses, gr = gravelly, D = diamicton.
Some of the clays in the Göta Älv valley are classified as quick clay, with the typical
character of clay deposited in salt water. As the salt stabilizes the clay, a change in the ground
water level or in the river water level might result in a strength loss of the clay due to
leaching. The clay can also lose its strength because of structure failure due to vibration in the
ground. The quick clay consists of a coalition of sticky and damp clay flakes. Changed water
condition or disturbed by different shaking procedures results in a separation of the flakes
making it easier for them to become suspended in the water. This transforms the formerly
solid clay into movable slurry, flowing like a fluid. The loss of strength resulting from
leaching especially occurs at locations where the clay layers are mixed with more permeable
layers where the water easily can move. This mix of clay and more permeable layers are
represented in the Göta Älv valley (Lindström et al., 2000).
The map ”Quaternary deposits in the Göta Älv
valley” by Järnefors (1957) shows the scar of
an old landslide (Fig. 4). This thesis` survey
area stretches across this old landslide scar.
The mapped sediments are described by
Järnefors (1959) as: “The present alluvial
deposits are clay mixed with sand, fine sand
and silt. The content of organic material is
often very high.”
Fig 4. A soil map of Hjärtum area showing the scar
of an old landslide (Järnefors, 1959). The yellow
symbolize stiff clay, yellow with red lines stand for
“mjälig” medium-grained clay, and the yellow with red
dots represent silty clay. The blue line is this investigation
survey profile.


7
close to the boarder of two different materials. The P-wave travels faster than the other waves,
followed by S-wave and the slowest are the surface waves. Travelling within a mass causes a
loss of energy and therefore the P- and S-waves contains less energy than the surface waves.
The P- and S-waves contain only about 6% of the generated energy from the wave source,
while the surface waves contain almost 2/3 of the energy when reflected or refracted back to
surface (SGF, 2008). The P-wave is the fastest wave, with Poisson`s ratio equal to 0.33. The
S-wave velocity is half the velocity of a P-wave. A Love wave travels with approximately the
same speed as a S-wave, while the Rayleigh wave travel slightly slower, at about 92% of the
S-wave speed (Reynold, 2005).
The most common wave type used in seismic methods is one of the body waves - the Primary
wave called the P-wave. Other names for the P-wave are: compression wave and longitudinal
wave. These names describe the particles movement in the ground, when exposed for
vibrations. The P-wave moves forward through the ground by altering compression and
dilation, in the direction of the wave (Barton, 2007). P-waves travel through any types of
substance, and sound waves travelling through the air are one example of P-waves.
The second type of body wave is the shear wave, called the S-wave. The S-wave is also called
the transverse wave and the movement of the S-wave causes the particles to vibrate back and
forth in a line perpendicular to the direction of the advancing wave front (Robinson and
Coruh, 1988). A large difference when comparing S-waves and P-waves, is that S-waves only
travel in solid material, and not in fluids or gas (Mussett and Kahn, 2000). Therefore the S-
waves are unaffected by the groundwater boundary as long as the density is not changed. The
amplitude of the S-wave is many times larger than the P-waves (Möller et al, 2000).
The surface waves, characterized by the rapid decrease of amplitude with depth, are separated
into two types; Rayleigh waves and Love waves (Mussett and Kahn, 2000). The main
difference between the two wave types are that in Love waves, the particle motion is
horizontal and transverse, whereas in Rayleigh waves it is a vertical ellipse. The Rayleigh
waves make the ground movement in a vertical plane aligned with the path of the wave front
(Reynold, 2005). The movement of the particles tends to persist much longer and the surface
waves travel, as earlier mentioned, slower than the body waves. The vibrations caused by the
Rayleigh waves travel slowly at first when travelling through the ground, and then more
rapidly, with an increasing frequency with time (Robinson and Coruh, 1988). Rayleigh waves
can only travel through solid medium (Reynold, 2005). The high energy content of the waves
permits low energy sources to be used, and due to dispersion of the waves a higher resolution
then the traditional methods should be to expect (SGF, 2008).
The second type of surface waves is the Love wave, which like the Rayleigh wave also travel
slower than the body waves. As the wave is moving forward in a horizontal plane, a point on
the land surface cycles back and forth in a horizontal plane perpendicular to the wave
direction. As with the Rayleigh wave the vibration persist much longer than the body waves,
and the oscillation movements’ in the ground continue to grow faster as the wave passes. The
frequency increases with time (Parasnis, 1971).
2.2 Seismic wave velocities
Figure 6, shows some generalized velocities for the P-wave and S-wave in different soil and
rock types.

8
Fig 6. Typical seismic velocities for P- and S-wave in different geological material (Turesson, 2006).
The velocities of the P-wave depend on different material parameters such as density,
porosity, the elastic module, water content, rock type and how weathered the rock is (Dahlin
et al., 2001). For example, seismic waves propagate with a higher velocity in a more
consolidated soil compared to a light soil due to the higher density in the consolidated soil.
The seismic velocity also varies in the same rock due to, for example, the variability of
quality of the mass of the rock (Musett and Khan, 2000). The S-wave velocity also varies
depending on the soil type, the effective strain level and the pore number (Möller et al., 2000).
The velocity of the P-wave can be described as a function of vP = √((λ+ 2μ)/ρ) where λ =
wavelength, μ = rigidity constant for the material where the wave spreads, and ρ= the density
of the material. The velocity of the S-wave can be described as vS = √(μ /ρ). As mentioned
earlier, the S-wave can only move in solid material, as liquids and non- solid materials has a
rigidity constant close to or zero, and with zero in the velocity formula the S-wave velocity
becomes zero. The velocity of the P-wave is, unlike S-wave, also dependent of the
wavelength and can therefore travel through any material (Dahlin et al., 2001).
Also the vertical resolution is dependent on the different wave types, concluded in Barton
(2007) “ …under all conditions, shear-waves penetrated with less attenuation than
compression-waves, also being unaffected by water saturation”. The explanation for the
better vertical resolution offered by shear-waves compared to compression-waves, especially
in shallow unconsolidated sediments, are that shear-waves velocities in such case only are
about half of the P-waves velocities. In this case there is a very small wavelength, despite the
fact that the dominant frequency of S-wave data generally is lower than the P-wave data.
Therefore, to achieve the same resolution with P-waves, a very high frequency pulse has to be
generated, which inconveniently will make the lower seismic layers more attenuated (Barton,
2007).
2.3 Seismic refraction surveying
Seismic refraction surveying has been used since the middle of the 20th. This method is today
one of the most powerful methods for detecting subsurface structure, and is together with the
seismic reflection surveying the most common used seismic method (Robinson and Coruh,
1988).
In traditional seismic refraction investigations the fastest P-wave are used, but S-waves can
also be used despite their lower velocity. Using the S-waves causes some difficulties as the

9
first arriving S-wave can interact with the secondary, reflected P-wave. Therefore the S-wave
is not as clear to identify as the P-wave.
A wave generated at the surface will spread in all downward directions, but also along the
surface; called the direct wave. As a wave crosses an interface to a layer with a higher
velocity, it refracts away from the normal according to Snell`s law, Fig. 7. A more oblique
angle to the interface might finally result in a critical angle where the refracted angle is
exactly 90 degrees making the refracted wave travel along the interface.
The value of the critical angel depends on the ratio of the velocities on
both sides of the interface. A wave travelling along the interface
makes the particles above the oscillation surface to oscillate too.
Therefore a disturbance matched to the wave front that travels along
the interface will propagate up to the surface at a critical angel. This
can only occur when the lower layer has a higher velocity than the
layer above; otherwise the wave will bend towards the normal and
become a “hidden layer”. In a section where more layers then two are
present the wave will continue as above, bend from the normal until it
meets a new interface with a critical angel where it will create wave
fronts to the surface (Reynolds, 2005).
At the surface the seismic energy will be registered by receivers
(geophones) and there are three ways for the energy to reach the receivers; direct waves,
refracted waves and reflection waves. These three waves reach the receivers at different times
where direct waves in most cases reach the receivers first due to shortest travel distance. The
direct wave reaches the receivers after a time that equals the distance divided by the velocity.
The time for a refracted wave to reach the receivers is the time spent below the interfaces, the
time it takes to go from the ground down to the interface and back up again (two way time,
twt). Using a time-distance diagram it is possible to calculate the different velocities of the
layers, where changes in the slope of the line indicate a new velocity and thus layer (Telford,
1990).
A layer`s composition is determined by the velocity of the waves. By calculating the velocity
of the refracted wave it is possible to determine the composition of the layer, mainly by
comparing the calculated seismic velocities for the P- and S- wave to known P- and S-wave
velocities in different geological materials. This is the basic theory of seismic refraction. This
method can also be used in more complex situations with several interfaces, tilted interfaces
and undulating interfaces.
There are some limitations of the refraction method where the time-distance refraction plot do
not identify the interfaces; when a layer is too thin or when an underlying layer has a lower
velocity compared to the one above. These situations result in a hidden layer and will not be
exposed in a time-distance refraction plot because the arriving waves from the layers below
will reach the transceivers earlier, resulting in a displaced depth and velocity (Mussett and
Khan, 2000).
A requirement for producing relevant velocity results from seismic refraction is that the
velocities in the geological layers increase with depth. Neighboring layers with large velocity
differences increase the measurement’s certainty by giving greater contrast and thus an easier,
more reliable model (Dahlin et al., 2001).
Fig 7. Snell`s law where:
v1= velocity of layer 1.
v2= velocity of layer 2.
i1= angle of incidence.
i2= angle of refraction.

10
2.4 Seismic reflection surveying
Seismic reflection is the seismic method that offers the best resolution regarding structural
features and stratigraphic sequences (Griffiths and King, 1988). The method is a form of echo
or depth sounding where the wave source generates a pulse that moves through the soil and
reflects back when meeting a new interface. The wave is reflected when hitting an interface or
discontinuity with a change in seismic velocity. The strength of reflection depends on the
acoustic impedance of the layer, the density and velocity, and the amount of contrast between
the layers (Robinson and Coruh, 1988).
When the wave front meets an interface, some of it is reflected and some is transmitted down
through the layers and reflected at the next interfaces. S-waves and P-waves are reflected
differently according to their velocities (Reynold, 2005).
In many cases the reflections are weak, especially at greater depth because of energy losses.
This results in reflections hard to recognize because the wave fronts intersects with the
inevitable noise always present on the trace. The data can be stacked to make the reflections
stronger, meaning that traces are added together to improve the signal-to-noise ratio (Reynold,
2005).
The data is often presented in a diagram with TWT on the vertical scale. A time correction is
made on the data to allow for the geophone’s offset. Different methods are used to correct the
data making it easier to get the real position of the reflector according to the interior and to
provide stacking. When the data is processed a single trace is produced for every common
depth point, and the data is shown as dark bands with distance on the horizontal axe and TWT
on the vertical axe (Robinson and Coruh, 1988).
As in seismic refraction surveying there are some limitations in the reflection methods that
make the seismic section differ from the geological section; instead of giving depth to the
reflector it gives TWT, reflections from a dipping interface are displaced, to give two
examples. Interfaces are not resolved if they are less than about ¼ wavelength apart. A shorter
wavelength generates poorer depth of penetration but increased resolution (Mussett and Kahn,
2000).
2.5 Seismic surface wave surveying
The surface wave surveying is the youngest of today’s used geophysics methods. It started
being commercially useful in the mid- 1990s. This method is less sensitive to noise than
seismic reflection and refraction surveying and offers, in addition to information about the
layer properties, also information about the material mechanical properties – for example the
shear modulus can be obtained (SGF, 2008).
With the seismic surface wave method the velocity of the shear waves in soil and rock can be
decided. The method uses the fact that the shear wave dominates the effect on the Rayleigh
wave in a stratified material.
The equipment is the same as for traditional refraction seismic and when all data is collected
the phase velocities for the Rayleigh wave is calculated for each shot point and spread.
The method produces a dispersion curve containing the surface wave velocities plotted
against the frequency. This curve is used for calculating the S-wave velocity and real depth
with the connection Vs=Vr/Poisson`s ratio, and depth= λ/2; λ=wavelength. λ=V/f where Vs is
the velocity of S-wave, Vr the velocity of R-wave, V the velocity and f the frequency (SGF,
11
2008). This is used for the inverted modeling to decide the possible velocity dispersion
(Dahlin et al., 2001).
3. Method 3.1 The field equipment and the software
Ground travelling seismic waves cause particles in the ground to oscillate. To measure these
movements, ground based geophones were used. The geophones convert the movement of the
ground into voltage, which are recorded by the instrument. The seismic response is the
deviation of the measured voltage from a baseline, and this is used for analyzing the structure
of the ground (Robinson and Coruh,1988).
Electromagnetic geophones were used. They consists of a magnet attached to a spring in a
coil that moves when the ground vibrates. The relative movement of the coil and the magnet
causes an electric current flow in the coil, proportional to the velocity of the ground
movement (Chapman and Hall, 1972).
Different waves generate different movements in the ground. Therefore there are different
types of geophones, vertical- and horizontal geophones, recording different wave types. To
register S-waves, 30 Hz horizontal geophones were used, and for the rest of the wave types 4-
and 10Hz vertical geophones were used.
The seismic response from the geophones was registered by two connected Terraloc Mark 6.
These instruments logged the response from the geophones as well as the shot time via one
trigger, connected to both instruments. The instruments generated exploration seismograms
showing pulses from the seismic waves refracted and reflected from the different layers. The
field data was later transferred to and interpreted by different software.
The software used for processing and interpreting were: Seismic Refraction Interpretation
Programs (SIP) from Rimrock Geophysics (Scott, 1973), ReflexW written by K.J Sandmeier,
RayfractTM
V2.65 from Intelligent Resources and Surfer from Golden Software Inc V9.0.
To register the location of the shot points, geophones, and the IP and resistivity equipments a
Differential GPS (DGPS), Trimble R7, from Trimble Acess was used.
3.2 In field
The field work was carried out during two days at the end of September 2010 on a large grass
field in the Göta Älv valley in Hjärtum, Lilla Edet. The investigated profile coincides with
SGI`s profile V26-350 and stretched 225m in northwest- southeast direction (Fig. 8).

12
Fig 8. The red line in the left image presents the survey profile. The two images to the right are photos from
field viewing the line seen from the eastern ends and the western ends.
The seismic data gathering was done with two connected ABEM Terraloc Mark 6 (Fig. 9)
with a set-up of 46 channels spacing 5m between geophones with geophone number 1 in the
west and number 46 in the east, located closest to the water. Traditional 48 channels were
used, but since two of the outlet was broken, only 46 channels were used in this survey.
Fig 9. The two connected ABEM Terraloc Mark 6
used in field.
P-wave refraction and reflection seismic data were measured and gathered during day one.
Geophone number 1- 24 were 4Hz and the remaining 10Hz vertical geophones. This data set
was recorded with a sample interval of 1ms in a time window of 800ms. Explosives used as
the energy source were Minex eco, 100g charges for all shots except for the two middle shots
which were charged with 50g. The ignition system was the Nonel, DynoNobel system with U-
475 milliseconds delay.
The geophone and shot points arrangement are seen in Figs. 10 and 11. Two shots were
discharged as far away from the outer most geophones as possible, -36m in the west and 74m
in the water in the east. In addition, two blasts were made 7.5m offset from the outermost
geophones. All charges were drilled down 0.8m, with an offset 1m from the cable. The total
amount of shot points were 27, spread equally along the profile every tenth meter (except
from the two outer most shot points (Fig. 11)).

13
Fig 10. An overview of all the survey profiles made in field.
Fig 11. The relative positioning of the geophones and different shot points for the seismic measurements.
As the cable, geophones and Terralocs were lined out and connected, the measurement
started. The dynamite was placed in the ground and discharged, one at the time and the
geophones collected data from the vibrating ground. The data were viewed and stored in the
Terralocs Mark 6.
Fig 12. An image from one of the black gunpowder blasting in field (Martin Persson, 2010).
Surface wave data, S-wave refraction data and resistivity- and IP- data were collected during
the second day. The used energy source for surface waves was about 200g black gunpowder
filled in plastic bottles dug down in every third hole from the previous day`s blasting. The
trigger worked for all except one which was redone with dynamite. This data set was recorded
with a sample interval of 0.5ms in a time window of 4s with 8192 samples. The data were
collected in the same way as the day before. Before the S-wave refraction measurement
started, all the vertical geophones were changed to 30Hz horizontal geophones. A charge was

14
dug down every 40m (with exception for the 7.5m offset charges), making it totally nine
shots. This data set was recorded with a sample interval of 0.1ms in a time window of 800ms
with 8192 samples. At the same time as the refraction and surface wave data were collected a
resistivity- and IP-data gathering was done.
3.3 DGPS
All shot points, geophones, and resistivity points were registered with a DGPS to coordinate
the survey profile. The data was gathered in post processing format meaning it had to be
corrected afterwards. This was done in the software Trimble Business Center (TBC) where
the survey coordinates were corrected to the data from the fixed station in Onsala, both with
1s data and 30s data to see how much it differed in precision between the two sampling
intervals. In the field, the sampling time was 10s on each point. Since the sampling time only
was 10s the correction with 30s data did not work due to their samplings interval not always
was done in the correction 30s window (It is noteworthy that where the 10s sampling did
correspond to the correction 30s window “new” corrected data correspond with the corrected
1s data). To correct the data, the survey data and the Onsala data were imported to TBC
where baselines were created. The baselines were processed and the survey coordinates were
corrected to the real coordinates using formulas that moved the points to their real locations
corrected by the known location of the fixed points in Onsala.
3.4 Identifying the first arrival time
Due to the quality of the data the two methods P-wave refraction and S-wave refraction were
chosen to be processed in this thesis. The programs used for processing the data were; SIP,
ReflexW, Rayfract and Surfer. First thing to do was to identify the times for first arriving
wave. The first arriving time equals the first registered wave at each geophone. This is a
subjective procedure and has to be done with highest possible accuracy because all the
remaining work of the modeling is based on this. Two programs were used for identifying the
first arrival time; SIP and ReflexW.
The time of the first arriving P-wave was more easily identified compared to the first S-wave,
but at geophones closest to the shot point even the S-wave data was quite clear. Figure 13
presents how the horizontal geophones used for measuring the S-waves filtered the P-waves.
But at geophones further away from the shot point, the geophones had gathered all the P-
wave data too.
Fig 13. The images show the times of arriving waves from one shot where timescale is on the Y-axis and spacing
in meters on the X-axis. In the left image the data was gathered with vertical geophones. The right image
presents the data gathered with horizontal geophones, illustrating how these geophones do not respond to the
first arriving P-waves. Shot point is positioned 36m from geophone 1.
3.5 Modeling in SIP
SIP is an old DOS software consisting of several different modules, such as ASIPIK, SIPIN,
and SIPEDIT. It is an inversion program used for calculating velocities and creating depth and

15
layer models. Here it was used to compare the depth of layers and the velocities with the
ReflexW models since the calculations in this program are more easily understood than the
ones in ReflexW. For modeling in SIP, a maximum of 7 pickfiles (files with times of first
arrivals per shot) could be imported and those were chosen to equally spread along the profile.
Also an elevation file was imported so the program could correct the first arriving times after
the changes in elevation of the geophones (ground surface). The layer affinities were set in the
time-distance graph and the velocity for all layers and locations were calculated, both by
regression of datum-corrected arrivals and by Hobson-Overton method.
With that done, the depths of the layers directly beneath each geophone and shot point were
computed and corrected to surface elevation. In the created model, the SGI data were inserted
and the average velocity for each layer is viewed in the final model presented in chapter 4,
Results and interpretations.
One restriction in the model is the fact that it is based on the identification of the first arriving
wave which was done by hand. Only the P-wave data were processed in SIP for velocity and
depth comparison, due to the unrealistic models from the S-data in the other programs.
3.6 Modeling in ReflexW In contrast to SIP, ReflexW uses spatial interpolation to calculate the layer velocities for
creating the model. The workflow in ReflexW started by identifying the time for first arrived
waves, followed by identifying the interfaces in layershow and modeling the depth and
velocities (see Fig. 14 for the steps).
Fig 14. The images present the different steps in the work flow in ReflexW. Upper image to left shows the
arriving waves from which the first arrival times were identified. Upper image to the right views the window
where each point got their layer properties. The lower image to the left shows the model created in ReflexW and
the last image present the final fixed model created by both ReflexW and Excel.
The text file imported to ReflexW contained elevation and location for the shot points and
geophones, and also the times of first arrivals. The function “insert shot Zerotraveltimes” was
activated to get a more accurate velocity in the uppermost layer. Then the layer affinities were
assigned. The layer affinities were decided according to the degree of the slope, i.e. the
velocity of the layer. A new layer begins with a change in the slope direction. For the layer

16
affinities see Fig. 15. The offset shots were only used to get the variation in velocity of the
bedrock and were not applicable for creating the depth model.
Figure 15. The layer belongings for S-wave data (left) and P-wave data (right).
An inversion was done for the second layer, where the forward and the reverse shot numbers
define the range for the inversion. Before the inversion started, a combined travel time curve
was generated and the total forward and reverse travel times were shown. These differed
significantly and therefore the function “Balance” was activated. This was done to get the true
balanced travel times for the modeling arithmetic calculation and depth analyses.
Before starting the wave front inversion, the model with the first interpreted layer was chosen
as model file. The inversion was then done, based on the total forward and reverse travel
times, and the new layer boundary were plotted in the model. These steps were done for all
layers, and all layers were allowed five different velocities along the profile. The result is a
four layer model containing velocities and depth for each layer.
3.7 Modeling in Rayfract and Surfer
The input-file for modeling in Rayfract consists of a text file containing the location of the
geophones and the shot numbers, all named as station number. The text file also contains the
times for first arriving waves (identified in SIP and ReflexW), the heights and lateral offsets
of the geophones and shot points, also the depth of the shot point (Example in Table 1).
Table 1. An example of a part of an input file to Rayfract.
Shot nr Shot station receiver station break receiver elev shot elev shot depth offset
1 -6.2 1 0.1255 16.532 20.681 0.8 1
1 -6.2 20 0.302 11.007 20.681 0.8 1
1 -6.2 21 0.3087 10.92 20.681 0.8 1
1 -6.2 22 0.312 10.748 20.681 0.8 1
2 1.5 1 0.0288 16.532 16.326 0.8 1
2 1.5 2 0.0308 16.125 16.326 0.8 1
2 1.5 3 0.0408 15.641 16.326 0.8 1
2 1.5 4 0.0529 15.236 16.326 0.8 1
Rayfract uses tomography to model data from seismic refraction surveying, meaning it uses
gridded inversion techniques to determine the velocity of individually 2D blocks within a
profile. This could therefore in some cases give more accurate models with better resolution
of the velocity structures (Persson, 2010). The software makes an inversion of the first arrival
times to estimate a 2D velocity model based on “Wavepath Eikonal Traveltime” (WET)
tomography (Schuster & Quintus-Bosz, 1993). It produces an eikonal equation and the given

17
time for first arriving wave by the elastic wave-equation; this method is named “smooth
inversion”. This method gives a gradual change between layers even if the layers have a
distinct change in velocity, and is therefore not optimal for the Swedish geology. The
additional method Delta t-V is better because of sharper boundaries (but still with gradual
transitions). When the inversion modeling was done, Rayfract exported a GRIDfile to Surfer
where the model was created and interpreted.
Both the S-wave data and P-wave data were tested with the WET model based on first 1D
smooth inversion as initial model, and then tested with recalculated 1D gradient as initial
model giving higher rock velocities. These models were tested with different numbers of
iterations, varying from 10 to 20, where 10 gives the most valid model according to the depth
to bedrock (Figs. 16 and 17 show the P-wave iteration 10 vs 20). Also WET-models based on
initial models done by the Delta T-v method were processed with both 10 and 20 iterations,
where 10 gave the most realistic velocities.
Fig 16. A smooth gradient image with 10 iteration, P-wave data.
Fig 17. A smooth gradient image with 20 iteration, P-wave data.

18
3.8 SGI data
GIS data, CPT-logs (Cone Penetrating test) and shear strength diagrams were supplied by
SGI. The seismic models were compared with SGI´s data to see how well the depth to the
friction material corresponded. The CPT-logs were used in efforts to explain the differences
in S-wave and P-wave models. Finally the SGI’s data and the coordinate data from the field
sampling were posted in GIS to get an overview of SGI´s data points and this investigation for
comparison.
4. Results and Interpretations 4.1 SGI data
In Fig. 18 the location of the six soundings from SGI are plotted together with this
investigations location for shot points and geophones.
Fig 18. The figure presents the SGI-data together with the position for the geophones and shot points from this
investigation.
The figure is created in ArcGis to show the locations correspondence to the SGI data. Three
of the soundings from SGI coincide with this study’s measured profile. The points U05158
(C), U05159 (C) and U05160 (C) are located at 54, 126 and 190m along the profile, measured
from geophone 1.
In Fig. 19, an overview of SGI`s soundings is shown and a red line is added indicating this
study’s location.
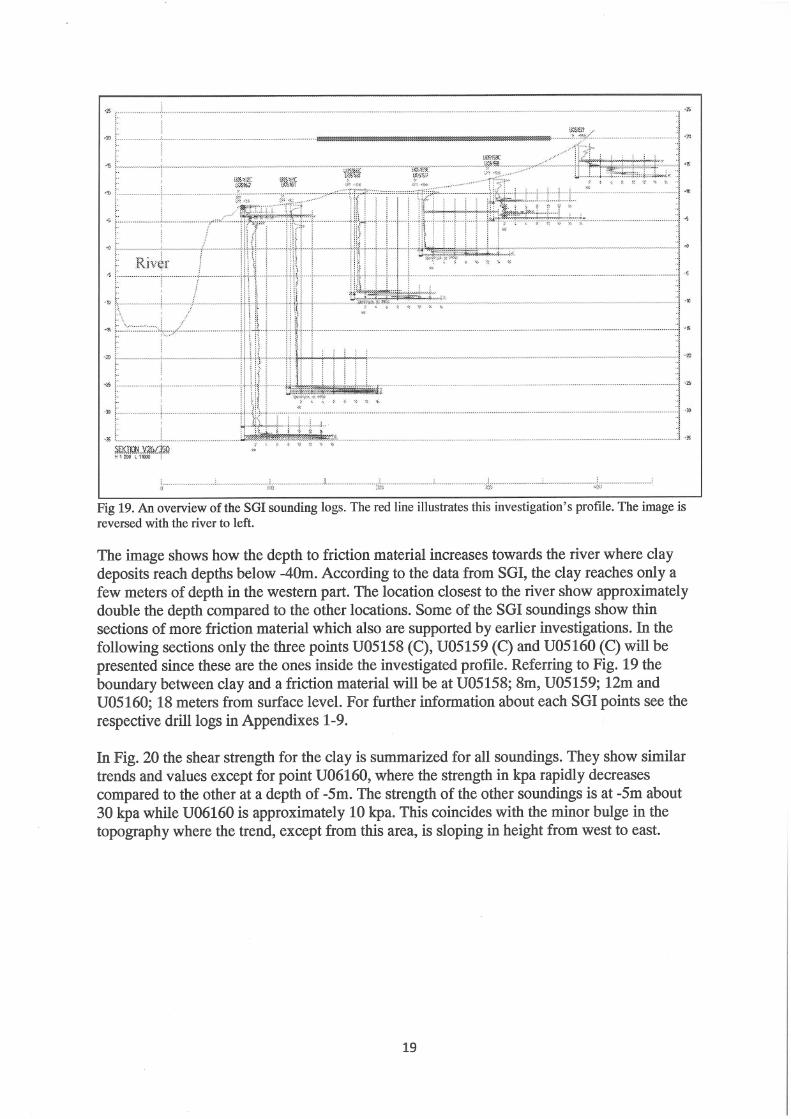
20
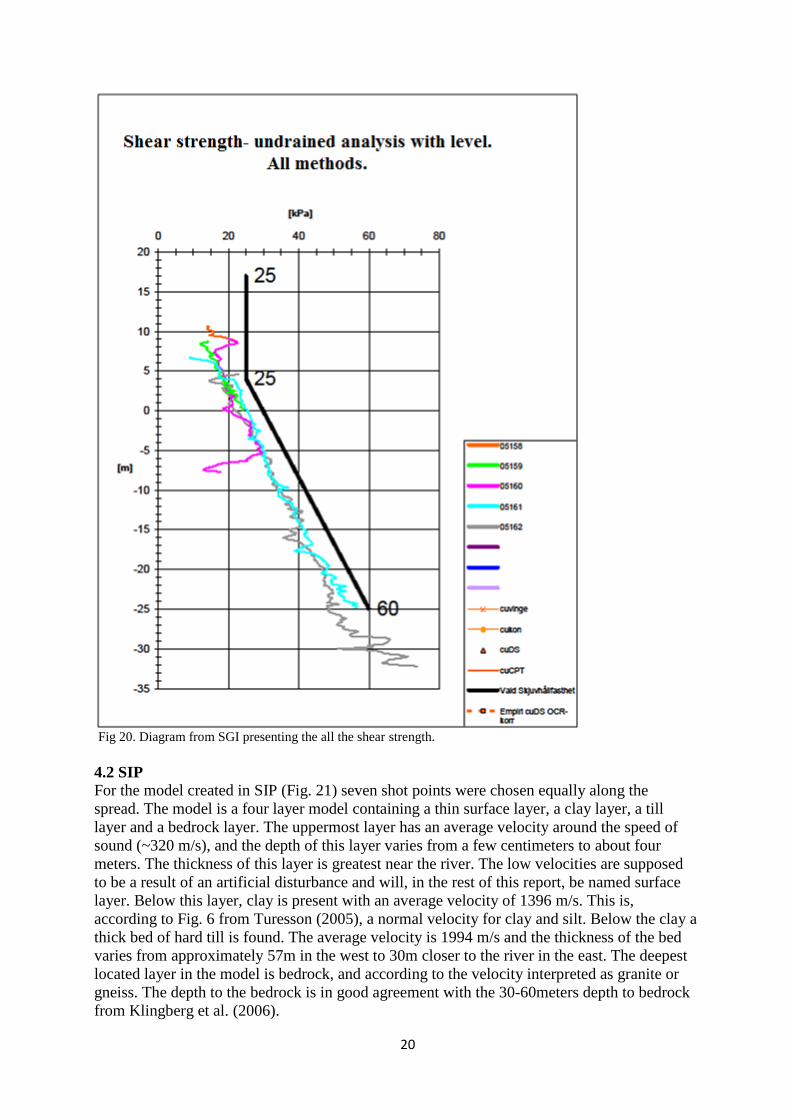
Fig 20. Diagram from SGI presenting the all the shear strength.
4.2 SIP
For the model created in SIP (Fig. 21) seven shot points were chosen equally along the
spread. The model is a four layer model containing a thin surface layer, a clay layer, a till
layer and a bedrock layer. The uppermost layer has an average velocity around the speed of
sound (~320 m/s), and the depth of this layer varies from a few centimeters to about four
meters. The thickness of this layer is greatest near the river. The low velocities are supposed
to be a result of an artificial disturbance and will, in the rest of this report, be named surface
layer. Below this layer, clay is present with an average velocity of 1396 m/s. This is,
according to Fig. 6 from Turesson (2005), a normal velocity for clay and silt. Below the clay a
thick bed of hard till is found. The average velocity is 1994 m/s and the thickness of the bed
varies from approximately 57m in the west to 30m closer to the river in the east. The deepest
located layer in the model is bedrock, and according to the velocity interpreted as granite or
gneiss. The depth to the bedrock is in good agreement with the 30-60meters depth to bedrock
from Klingberg et al. (2006).


22
this stratum is quite homogenous with a velocity around 2000 m/s. This is according to Fig. 6
by Turesson (2005), a normal velocity for till. The layer reaches a thickness of about 60m in
the western part and 30m in the east closer to the river. From the surface, the depth to the
bedrock varies from 60-40m and it slopes from the river. The depth to bedrock is consistent
with the level from earlier investigations by Klingberg et al. (2006), where bedrock is present
at depths of 30-60m beneath surface. The velocity of the bedrock varies from 3800-4800 m/s
with an average velocity of 4262 m/s which according to the velocity table from Turesson
(2005) classifies as granite and gneiss, an expected bedrock type in the area according to
Klingberg et al. (2006).
Fig 22. P-wave model created in ReflexW with added SGI-data shown in black. The average velocity for each
layer is shown in the legend.
The SGI data were added to the model and the depth to friction material seems to correspond
very well. The depth of reconnoiter U05158 coincide in the same way as in the SIP model
where the boundary between clay and till coincide with the first level of SGI´s measured
friction material. According to the sounding log, this first friction layer appears to be only a
half meter thick followed by approximately 3m of clay before new friction material is found.
This sequence is not present in the model. The depth to friction material at the second SGI
point U05159 is about 5m above the boundary in the model, while the depth of U05160 is
similar as the boundary to the model.
4.3.2 S-wave
Like the P-wave model, the S-wave model is a 4 layer model seen in Fig. 23. The uppermost
layer has a low velocity of 91 m/s. This layer is only present in the eastern part of the profile,
from about 140m and eastward. The depth of this layer varies from 0-4m and gets thicker
towards the river. Layer number two has an average velocity of 310 m/s and is therefore
classified as clay. This layer show similar thickness along the entire profile of approximately
20m. The boundary to the underlying layer with an average velocity of 768 m/s is almost
horizontal. This velocity indicate, according to Fig. 6 from Turesson (2005), a layer consisting
of till. The velocities are almost the same in the whole layer, varying between 748-783 m/s.
The till layer is approximately 40-55m thick. The bedrock of either granite or gneiss is located
underneath the layer of till, indicated by the increase in velocity. The average velocity is 1838
m/s with velocity variations between 1500-2000 m/s. Similar to the P-wave model in Fig. 22,
the bedrock slopes towards the western part of the profile, away from the river. The bedrock
in the S-model is located at depths of 65-85m from the surface level.

23
Fig 23. S-wave model created in ReflexW with added SGI-data shown in black. The average velocity for each
layer is shown in the legend.
The depths of clay from SGIs investigation are presented in the model. These depths do not
correspond at all with the model; generally the depths in the S-model are located about 15m
below the SGI depth. The most similar depth is at point U05160 were the difference is
approximately 7m.
4.3.3 Velocity variations in the layers, and boundary trends
When modeling in ReflexW the velocity within each layer were allowed to vary with five
velocities, except from layer 1 where the velocity varies with unknown velocities. In Fig. 24
the variation of the velocity within each layer are presented for both P-wave data and S-wave
data. Except from the surface layer, the velocities of each layer are quite homogenous, and the
velocity differences follow the same trend in bedrock for both S-wave and P-wave.


26
4.4 Rayfract
4.4.1 P-wave
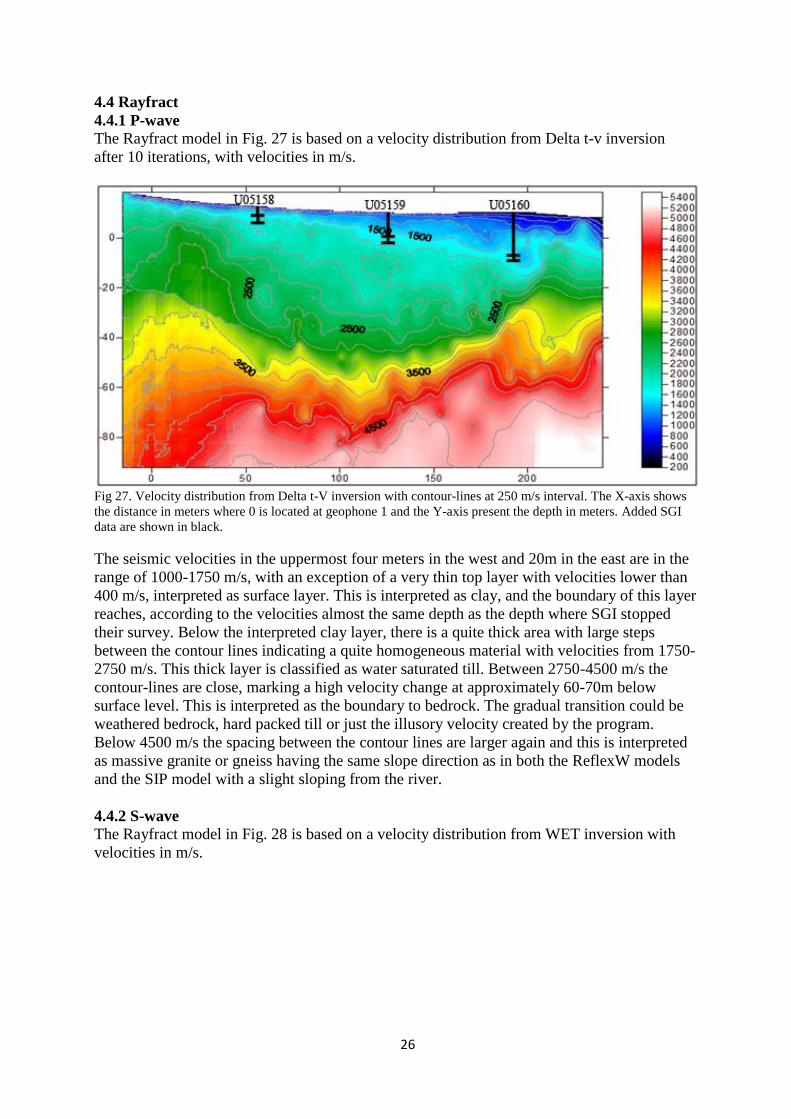
The Rayfract model in Fig. 27 is based on a velocity distribution from Delta t-v inversion
after 10 iterations, with velocities in m/s.
Fig 27. Velocity distribution from Delta t-V inversion with contour-lines at 250 m/s interval. The X-axis shows
the distance in meters where 0 is located at geophone 1 and the Y-axis present the depth in meters. Added SGI
data are shown in black.
The seismic velocities in the uppermost four meters in the west and 20m in the east are in the
range of 1000-1750 m/s, with an exception of a very thin top layer with velocities lower than
400 m/s, interpreted as surface layer. This is interpreted as clay, and the boundary of this layer
reaches, according to the velocities almost the same depth as the depth where SGI stopped
their survey. Below the interpreted clay layer, there is a quite thick area with large steps
between the contour lines indicating a quite homogeneous material with velocities from 1750-
2750 m/s. This thick layer is classified as water saturated till. Between 2750-4500 m/s the
contour-lines are close, marking a high velocity change at approximately 60-70m below
surface level. This is interpreted as the boundary to bedrock. The gradual transition could be
weathered bedrock, hard packed till or just the illusory velocity created by the program.
Below 4500 m/s the spacing between the contour lines are larger again and this is interpreted
as massive granite or gneiss having the same slope direction as in both the ReflexW models
and the SIP model with a slight sloping from the river.
4.4.2 S-wave
The Rayfract model in Fig. 28 is based on a velocity distribution from WET inversion with
velocities in m/s.

27
Fig 28. Velocity distribution from a WET inversion with 10 iteration and a Delta t-V inversion model as entrance
model with contour lines at 250 m/s interval. The X-axis shows the distance in meter where 0 is located at
geophone 1 and the Y-axis present the depth in meters. Added SGI data are shown in black.
The seismic velocities in the uppermost 16m varies between 250-400 m/s with an exception
for the area at about X=140m. This location shows a bulge with lower velocities of 0-250 m/s
9m below the surface level. This almost horizontal 250-400 m/s layer is interpreted as clay
and the lower velocities above it, is interpreted as an artificial disturbed surface layer. The
clay-till boundary do not correspond with the depth from SGI soundings at any location.
Below the layer of clay there is a quite homogeneous area with velocities of 400-750 m/s and
a thickness of 20m in the eastern parts, and close to 30m in the western parts. This is
interpreted as till. Below the seismic velocity of 750 m/s the model gets complex and even if
there is a general trend of increased velocity with depth, there are parts in the middle of the
model showing locations with lower velocity below higher velocity locations. According to
this model the bedrock do not seem to appear at all in the eastern parts and in the western the
bedrock could be identified according to the velocity of 2000 m/s in Fig. 6, at depths of 55-
80m below surface level. The complex area between the interpreted till and bedrock layer
could be an area with mixed material after the old landslide shown in Fig. 4. This influence of
a density change would affect the velocities of the S-wave data. It could also be a result of
illusory velocity created by the program as it always creates gradual transitions.
4.5 Depth comparison
In this section the depth to friction material is plotted in diagrams from all the used models, to
get an overview of how well the different models correspond to each other and to the
sounding data from SGI. Note that columns in the diagram always proceed from the sea level
(0), and the outermost point of the column presents the position of depth of the boundary clay
to till, e.g. if the column stops at 5 the boundary is positioned 5m above sea level. This is
mentioned because all the earlier data is presented with the surface level as the reference.
In Fig. 29 the depths modeled at 56m from geophone 1 (where sounding U05158 is located)
are summarized.

29
In this diagram the column “SGI-friction” is not shown due to its value of zero. This location
shows very different results compared to the 56m location. The depth from SIP’s P-wave
model, and both the S-wave and P-wave models from Rayfract agree within 1m compared to
the SGI friction data. The two ReflexW models differ from the SGI depth with 3 and 17m,
respectively. The S-wave model does not coincide with the SGI depth at all. The ReflexW P-
wave depth differed from the depth of the other two P-wave models in Rayfract and SIP with
approximately 5m, contrary to location 56 showing similar results from the three methods.
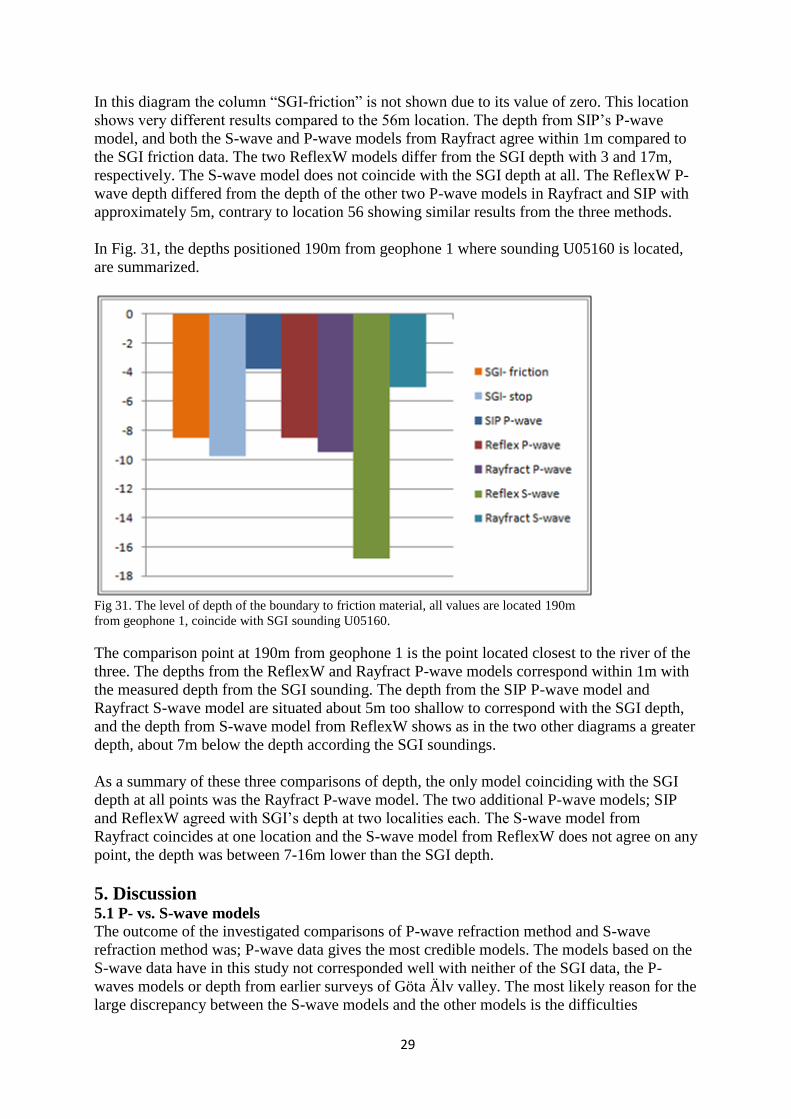
In Fig. 31, the depths positioned 190m from geophone 1 where sounding U05160 is located,
are summarized.
Fig 31. The level of depth of the boundary to friction material, all values are located 190m
from geophone 1, coincide with SGI sounding U05160.
The comparison point at 190m from geophone 1 is the point located closest to the river of the
three. The depths from the ReflexW and Rayfract P-wave models correspond within 1m with
the measured depth from the SGI sounding. The depth from the SIP P-wave model and
Rayfract S-wave model are situated about 5m too shallow to correspond with the SGI depth,
and the depth from S-wave model from ReflexW shows as in the two other diagrams a greater
depth, about 7m below the depth according the SGI soundings.
As a summary of these three comparisons of depth, the only model coinciding with the SGI
depth at all points was the Rayfract P-wave model. The two additional P-wave models; SIP
and ReflexW agreed with SGI’s depth at two localities each. The S-wave model from
Rayfract coincides at one location and the S-wave model from ReflexW does not agree on any
point, the depth was between 7-16m lower than the SGI depth.
5. Discussion 5.1 P- vs. S-wave models
The outcome of the investigated comparisons of P-wave refraction method and S-wave
refraction method was; P-wave data gives the most credible models. The models based on the
S-wave data have in this study not corresponded well with neither of the SGI data, the P-
waves models or depth from earlier surveys of Göta Älv valley. The most likely reason for the
large discrepancy between the S-wave models and the other models is the difficulties

30
regarding identifying first arriving times. It was easier to identify the outermost files and the
ones close to the shooting points, but became more difficult as the distance from the energy
source to the receivers increased. The reasons were the interference of the first arriving S-
wave and the second arriving P-wave, reflexes from P-waves and also possible secondly
generated S-waves from the P-waves. This made the identifying of first arriving S-wave more
of a qualified estimate than knowledge. This might be avoided using a more pointed energy
source.
According to the shape of the till and the bedrock, the S-wave ReflexW model seems to
correspond quite well with both the P-wave models from SIP and ReflexW. The similarity in
shape of the S-wave and the P-wave model from ReflexW could suggest there is something in
the inversion steps that is problematic regarding the depth calculation. But if the differences in
depth would depend only on the spatial interpolation and inversions, the S-wave model from
Rayfract would not correlate with the ReflexW S-wave model as it does.
When comparing the values of velocity changes of each layer, it shows a 28% smaller value
of the clay-till interface for the S-wave compared to the P-wave. This results in a different
refraction angle according to Snell´s law creating greater depths. Small changes in velocity
result in a decrease of the interfaces refraction angle showing greater depths. This because the
wave front spends more time in the ground before the critical angel is reached, and the wave
front returns to surface and are registered at the geophones. But since the velocities are
calculated from the time of the first arriving wave, the source of error still ends up in the
difficulties of identifying first arriving times.
Another reason for the dissimilar depths of the P- and S-wave models could in theory be some
geological features that only affect the S-waves and not the P-waves which would result in
misleading depths. Two factors that S-wave velocities, and not the P-waves depend on, are the
shear strength and the density of the material when situated below ground water table. Since
the survey profile crosses the old landslide, it could be the reason for deviating depth results.
In the S-wave model from Rayfract a lot of inversions are observed as fields of lower
velocities located below higher velocity material. This could reflect layer disturbance and a
mixture of grain size as a result of the landslide. The P-wave data will not detect this, as the
water table is located just below the surface and the velocity is affected by the water
saturation. Looking at the shear strength log from SGI, the data from all the localities follow
the same strength trend except from U05160 at -5m were it loses almost all its shear strength.
According to the formula of S-wave velocity this would be observed by changes in velocity of
the S-wave. This is not the case, and it is not observed in any of the S-wave models.
When comparing the average velocity from the P- and S-wave models, the average general
velocity for the S-wave is almost 1/3 of the P-wave velocity. This is quite low according to
chapter 2.1 where the general differences between P- and S-wave are described as S-wave
velocity is about half the P-wave velocity. This low velocity would result in shallower depths,
which is not the case. The differences regarding the depths in the models decrease with
increase of the actual depth in the measured profile. The shallow part results in greater errors
compared to the deeper parts.
5.2 Bedrock
Since there is no sounding data below the first friction layer there is no actual known depth to
bedrock. However, earlier investigations suggest a depth to bedrock of 30-60m from sea level.
This corresponds with the P-wave models making them more reliable compared to the S-wave

31
models. The depth to the bedrock in all the P-wave models differ less than 10%, which is the
accepted limit for accuracy when using seismic refraction methods (personal communication
with Hegardt and Meland).
All three P-models indicated a bedrock boundary sloping from the river, which is rather
common. Looking at the soil map of the area, a steep high rock unit is located close to the
river on the opposite side, supporting the slope’s direction in the model. The location of the
river is not affected by the shape of the bedrock; the meandering is only affected by the till
and the clay.
5.3 Comparison of the different software models
The depth of the clay deposits from all the created P-wave models correspond quite well with
the SGI depth. Out of the three P-wave models, it was only the Rayfract model that agreed
with SGI’s data at all three compared points. Yet, the depth from Rayfract used for the
comparison is an estimated value from the Rayfract models, and therefore not a precise depth.
Still, it resulted in the most accurate depth compared to the SGI depths, and this is the only
model out of the three P-models that do not depend on human identifying of interfaces and
layer affinities. Rayfract removes one source of error, but the software always creates gradual
velocity changes between interfaces, which not always is the case in the Swedish geology.
The comparison of the accuracy of the different programs used for creating depth models end
up with a higher agreement at greater depth then at shallower depth. One explanation is that
the different calculation and inversion methods used in the different softwares have a greater
impact for small depths than for greater depths. As differences in the calculations get
eliminated with increased velocity, it ends up with a more accurate bedrock depth compared
between models than for example depths to clay.
5.4 The stratigraphy
Common for all the five produced models are the 4 layer models with the same stratigraphy;
artificial disturbed surface layer, clay, till and bedrock. This is the highest resolution of the
stratigraphy the seismic refraction methods could offer in this project. The models do not
show any lenses or layering in the clay, which according to SGI sounding data U05158 is
present with a meter thick deposit of friction material located about 3m above the interface of
clay-till. Instead the models have interpreted this thin lens as the boundary between clay and
till, explained by one of the limitations of the refraction methods, the incapability of detecting
layers with lower velocity below a higher velocity layer. According to earlier investigations in
the area, e.g. Stevens et al. (1990) the stratigraphy consists of different clay layers mixed with
materials of different grain sizes as clay with silt or clay with sand. This resolution is not
present in the produced models, but it is not certain this stratigraphy is present at the site since
the large landslide could have mixed the layers. Therefore, it is possible that the models
present the real stratigraphy with almost homogenous layers. This interpretation is supported
by the varied velocity graphs for each layer, presenting a very small difference in velocity
within each layer, thus indicating homogenous layers with the same grade of consolidation
within the complete layer.
5.5 Till layer
The occurrence of such a thick till layer that all the refraction models present is very rare in
SW Sweden (personnel communication with Stevens). A more likely scenario would be a
glaciofluvium deposit of gravely-sand followed by diamicton (Stevens & Hellgren, 1990).
The gathered resistivity data from the field (Fig. 32) support the boundary of clay- friction

32
material from the refraction models, but it also suggests a more complicated stratigraphy
within the suggested till layer from the refraction models.
Fig 32. A preliminary, uncorrected resistivity image of the profile. No topography was used during inversion,
possible IP-related data are reduced and res2dinvstandardsettings (with robust constraints) are used.
Unpublished.
The interpretation of this resistivity data shall be handled with care since it is uncorrected
preliminary data. However, the model does support the boundary of clay- friction material and
might explain the thick till layer offered by the refraction models. Clay normally has a low
resistivity value, often below 100 Ωm (Dahlin et al., 2001). This boundary in the resistivity
model will therefore support the boundary of the refraction models. A wet gravel and sand
layer normally has a resistivity above 100 Ωm, while a typical coarse-grained Swedish till
often results in a resistivity of several hundred Ωm (Dahlin et al., 2001). The resistivity model
shows varying resistivity values below the clay layer- suggesting a more complex stratigraphy
than the refraction models show. If the refraction data has simplified the stratigraphy of the
layer below the clay to just one layer (interpreted as till according to its velocity) it will affect
the models in the following ways.
The velocity of the layer below the clay is by the software calculated to approximately 2000
m/s in the P-model. If the stratigraphy in reality is more complex hosting several different
layers including some layers like sand and gravel with a much lower velocity compared to the
till, it will affect the depth calculation. If the programs calculate the depth for the unit with
velocity 2000 m/s instead of calculating depth for, say four different units where three of them
has a much lower velocity than 2000 m/s, it will result in an enlarged depth. The program has
the time for the wave spent in ground as well as the velocity; therefore a higher velocity
would lead to greater depths then a low velocity layer with the same arrival time. Referring to
the velocity of till in the refraction models, it probably shows a thin till or another high
velocity layer just below the clay which has “hidden” the low velocity layers below in the
refraction method. Then the real stratigraphy in the “till layer” could be a thin layer of till or
other coarse material followed by sand and gravel and other glaciofluvial deposits as reported
by Stevens and Hellgren, (1990). If there are some hidden layers it also means that the
bedrock probably is displaced and not located as deep as the refraction models suggest
(Mussett and Kahn, 2000). Therefore the till layer would be much thinner and not
homogeneous till. Further work with the resistivity and IP data could give more information
about this and also an interpretation of the reflection data could give a better resolution.
If there is a more complex stratigraphy of the till layer than the refraction data model offers,
with lower velocity layers included it will also affect the slope of the bedrock. Since the
eastern parts of the profile has a much thicker clay layer than the western parts this will
reduce some of the inaccuracy of the depth calculations of the bedrock As the “wrong till
layer” constitute a smaller percent of the material above the bedrock it will have a smaller

33
influence of the total depth than if the clay layer is much thinner as in the western parts. In the
western parts of the profile, the depth of the bedrock almost only depend of the till layer
which lead to greater depths in this area. Therefore, it is possible the bedrock actually slopes
towards the river, instead of from the river suggested by the refraction models.
However, the depth of the bedrock suggested by the refraction data models coincides with the
depth of the bedrock in the river next to the field from earlier studies by Dahlin et al. (2001).
5.6 Surface layer The thin layer of artificial disturbed surface layer with velocities sometimes lower than the
speed of sound has an enormous impact on the depth in the models created in ReflexW. In the
P-model, all the layers were shifted about 15m deeper when not taking this layer into account.
Since there is no surface layer present in the western half of the S-wave model produced in
ReflexW, this could be one of the reasons for the displaced interfaces. The boundary clay-till
slopes towards the river according to the P-wave models and the SGI-data. Therefore it is
possible to assume that the missing surface layer in this part in the S-model could be the
reason of the almost horizontal interface displaced at greater depths. Also the use of the offset
shot points had a great impact on the depth, shifting it downwards, and therefore they were
not used when creating the depth models. They were however used for calculating the
variation of velocity within the bedrock layer.
The low velocity in the upper layer could depend on a pre-trigger at the shot moment, or be a
result of the ribbed surface at the field. The velocity of the artificial disturbed surface layer
could refer to P-wave velocity represented by unsaturated clay or till. This is however
unlikely since the layer is present in the S-wave models. S-waves are not affected by the water
table since they only propagate in solid materials. Irrespective of what this layer really
consists of, it has an impact on the model depths, but was not present in the SGI-data or
observed in field.
5.7 Future work
It would be of interest to do further interpretation of the resistivity and IP-data for comparison
with the clay depths from the refraction models. It would also be of interest to stack the data
to see if the reflection method works, and if it does, to compare those models with the models
from this thesis. One final suggestion for future work in the field would be to redo the surface
wave data gathering with longer time laps.

34
6. Conclusion The field site of this investigation is situated within the scars of an old landslide. The
refraction data results in 4 layer models with material interpreted as artificial disturbed surface
layer, clay, till and bedrock. When comparing depths to the clay-till interface for models from
all methods and the SGI sounding data, the P-wave model from Rayfract offers the best
precision of clay depth compared to the SGI data. Since all the P-wave models end up with
depth to clay within one meter from the SGI depth, this confirms the stop of sounding as the
real boundary to friction material. The bedrock in the models is found at a depth of about 60m
in the western part and 50m in the eastern part of the profile, slightly sloping away from the
river. The differences in depth between the models created with the different softwares
Rayfract, ReflexW and SIP, seem to decrease with depth suggest that the accuracy of the
depth to interfaces increases with the depth. This is suggested to be a result of several hidden
layers in the till layer, affecting the calculations.
The S-wave refraction approach did not offer any reliable models since the depths of the
interfaces were displaced several meters downwards. This is probably a consequence of the
identifying of the time of first arriving wave, and the greater velocity differences between
clay-till layer offered by the S-waves than the P-waves. Therefore the P-wave refraction data
offers the best precisions of soil depth measurements at soil depths greater than 30m. The
velocities in the models suggest homogeneous layers, which can be supported by the old
landslide leaving a homogeneous mixture of the clay. The refraction models did not observe
the approximately 2m thick clay deposit below the one meter sand/gravel lens observed by
SGI sounding in the western parts. This illustrates the limitation of the refraction method in
not detecting too thin layers or lower velocity layers overburden by layers with higher
velocity.
7. Acknowledgement I especially wish to thank my supervisors Erik Meland and PhD Eric Austin Hegardt from
Bergab, and also docent Erik Sturkell for support, offering theoretical help and suggestion,
explanations, help in field, and not least for many interesting and instructive discussions
during the process. They are also thanked for suggestion and work with the thesis and useful
help with the manuscript. PhD student Martin Persson is thanked for his assistance during the
fieldwork and for his useful knowledge of the regional geology and articles about it. Also
Rickard Granqvist is thanked for assistance in field. Birgitta Meland is thanked for lovely
food and accommodation during the field weekend, and Johan Persson is thanked for his
invaluable explanations of Rayfract.
I would also like to thank Hanna Tobiasson Blomen, Mats Öberg and Marius Tremblay on
SGI for their support with their data and for being very helpful with explanations and useful
knowledge. Christian Voelkerling and Leif Utter on Geograf are thanked for assistance and
support with the Trimble problems. Leif Karlsson is being thanked for supporting with the
manuscript correction. Finally Fredrik Schenholm is thanked for being very helpful and
supportive throughout the work with the report writing, and for his patience and support
during the whole project.

35
8. References Books:
Griffiths, D.H., King, R.F., 1981: Applied geophysics for geologists and engineers: the
elements of geophysical. Oxford Pergamont P., 230 pp.
Lindström, M., Lundqvist, J., Lundqvist T., 2000: Sveriges geologi från urtid till nutid. 2:d
edition, Lund studentlitteratur, 530 pp.
Mussett, A.E., Khan, M.A., 2000: Looking into the earth: An introduction to Geological
Geophysics. Cambridge University press, 470 pp.
Parasnis, D:S., 1972: Principles of applied geophysics. 2:d edition. Chapman and Hall, 214
pp.
Reynolds, J.M., 2005: An introduction to applied and environmental geophysics. John Wiley
& Sons, 796 pp.
Robinson, E.S., Coruh, C., 1988: Basic exploration geophysics. John Wiley & Sons, 562 pp.
Sveriges National Atlas 2002: Berg och Jord. 3:d edition, SNA Förlag, 208 pp.
Telford, W.M., Geldart, L.P., Sheriff, R.E., 1990: Applied geophysics. 2:d edition. Cambridge
University press, 770 pp.
Barton Nick, 2007; Rock quality, seismic velocity, attenuation and anisotropy. Taylor and
Francies Group, London, 729 pp.
Reports & Articles:
ABEM Instruction manual, Reference manual for ABEM Terraloc Mk6 v2 and Mk8 with
ABEM SeisTW for Windows XP, 2009.
Dahlin, T., Larsson, R., Leroux, V., Svensson, M., Wisèn, R., 2001: Geofysik i
släntstabilitetsutredningar. Rapport 62, Statens Geotekniska Institut, Linköping, 67 pp.
Järnefors, Björn., 1957; Jordartskarta Götaälvdalen I tre blad, norra bladet. Ser Ba nr 20.
SGU.
Klingberg, F., Påsse, T., Levander, J., 2006: Bottenförhållanden och geologiska utvecklingen i
Göta Älv. SGU rapport K43, 27pp.
Metodblad Ytvågsseismik, Svenska Geotekniska Föreningen. 2008-01-01.
Möller, B., Larsson, R., Bengtsson, P-E., Moritz, L., 2000; Geodynamik i praktiken.
Information 17, Statens geotekniska institut, Linköping. 56 pp.
Persson, J., 2010: Tomografisk modellering med programmet RayfractTM
för bedömning av
bergkvalitè utifrån refractionsseismik. Bachelor of Science thesis B595, Göteborg.

36
Redpath, B.B., 1973: Seismic refraction exploration for engineering site investigations,
Technical Report E-73-4, U.S. Army Engineering Waterways Experiment Station Explosive
Excavation Research Laboratory, Livermore, California
Stevens, R., Hellgren, L-G., 1990; A generalized lithofacies model for glaciomarine and
marine sequences in the Göteborg area, Sweden. GFF, 112: 2, 89- 105
Turesson, A., 2005: Evaluation of combined geophysical methods for characterization of
near-surface sediment. Doctoral thesies A100, Earth Science Centre.
Internet:
Overview of Göta Älv valley Comission, SGI- www.swedgeo.se 2010-09-20
Soilmap from SGU, http://maps.sgu.se/sguinternetmaps/jord/viewer.htm 2010-10-23
Image of Snell`s law, http://galitzin.mines.edu/INTROGP/SEIS/NOTES/snell.gif 2010-09-15

Appendix
ii. Detailed sounding log from SGI, point U05157
iii. Detailed sounding logs from SGI, point U05158 (C)
iv. Detailed sounding logs from SGI, point U05159 (C)
v. Detailed sounding log from SGI, point U05160
vi. Detailed sounding log from SGI, point U05160 C
vii. Detailed sounding log from SGI, point U05161
viii. Detailed sounding log from SGI, point U05161 C
ix. Detailed sounding log from SGI, point U05162
x. Detailed sounding log from SGI, point U05162 C

ii

iii

iv

v

vi

vii

viii

ix

x