2011 04 me1100 adas and enabling technologies
DESCRIPTION
AutomotiveTRANSCRIPT

1ME1100 – ADAS class | 54
Advanced Driver Assistance Systemscurrent state of the art of systems and enabling technologies
Teacher
• David Abbink, [email protected]
• BioMechanical Engineering, Delft University of Technology
Simulation

2ME1100 – ADAS class | 54
Contents
1. Introduction• What is an Advanced Driver Support System?• What driving tasks can benefit from ADAS?
2. Enabling technologies
3. Examples of ADAS
4. Case Study: ACC – automation or support?
5. Take Home Message
Contents

3ME1100 – ADAS class | 54
Introduction
4ME1100 – ADAS class | 54
Today: serious problems!
Road Congestion
Road accidents
• EU cost: €50 billion / year
• EU cost: €160 billion / year• 1.7 million injuries / year• 40,000 deaths / year

5ME1100 – ADAS class | 54
Cell
Phones
Main cause of accidents: Driver Inattention
In-vehicle
Infotainment
Accident Causation
6ME1100 – ADAS class | 54
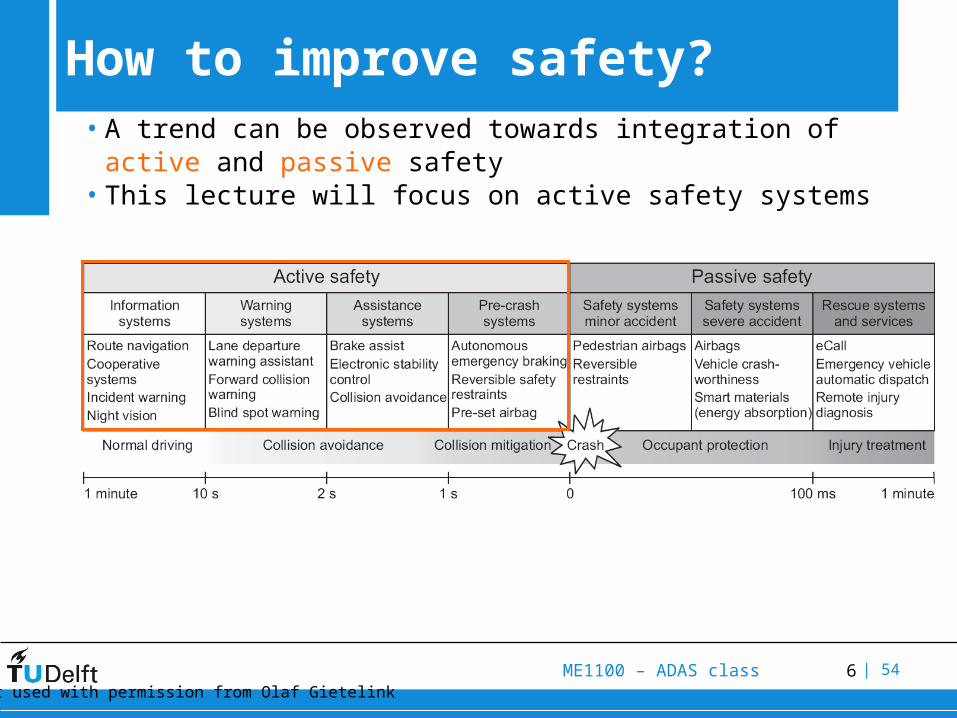
• A trend can be observed towards integration of active and passive safety
• This lecture will focus on active safety systems
Sheet used with permission from Olaf Gietelink
How to improve safety?
7ME1100 – ADAS class | 54
ADAS = advanced driver assistance systems
Active safety systems that use technology (sensors, computers, and actuators) to support or automate a driving task
Goal: increase safety and comfort of the driver
What are ADAS?

8ME1100 – ADAS class | 54
Sorted by Rasmussen’s Skill-Rule-Knowledge based control• Strategical: Choosing route• Tactical: Choosing speed or distance• Operational: Moving steering wheel or gas pedal
Sorted by hazard and direction• Low Hazard: Speed Control Lane-keeping• Medium Hazard: Car Following Curve Negotiation• High Hazard: Emergency Braking Swerving
What driver tasks can benefit from ADAS?
9ME1100 – ADAS class | 54
The Past

10ME1100 – ADAS class | 54
Today
Traffic jams
Near future
Advanced DriverAssistance Systems
(ADAS)
Far future?
Autonomous driving
Intelligence
PATH RWS
Current & Future Trends

11ME1100 – ADAS class | 54
Goal: High safety and reliability requirements
1) Complexity of the system and its environment
• Environmental disturbances
• Sensor characteristics
• Unpredictable traffic scenarios
2) Human factors
Sheet used with permission from Olaf Gietelink
Main challenges for ADAS

12ME1100 – ADAS class | 54
Challenge: Complexity
• Support for interaction with road• Location / route • Lane boundaries (straight roads, curves)• Speed
• Support for interaction with other road users• Cars / trucks• Motorcycles• Pedestrians / bikes / pets (urban areas)
13ME1100 – ADAS class | 54
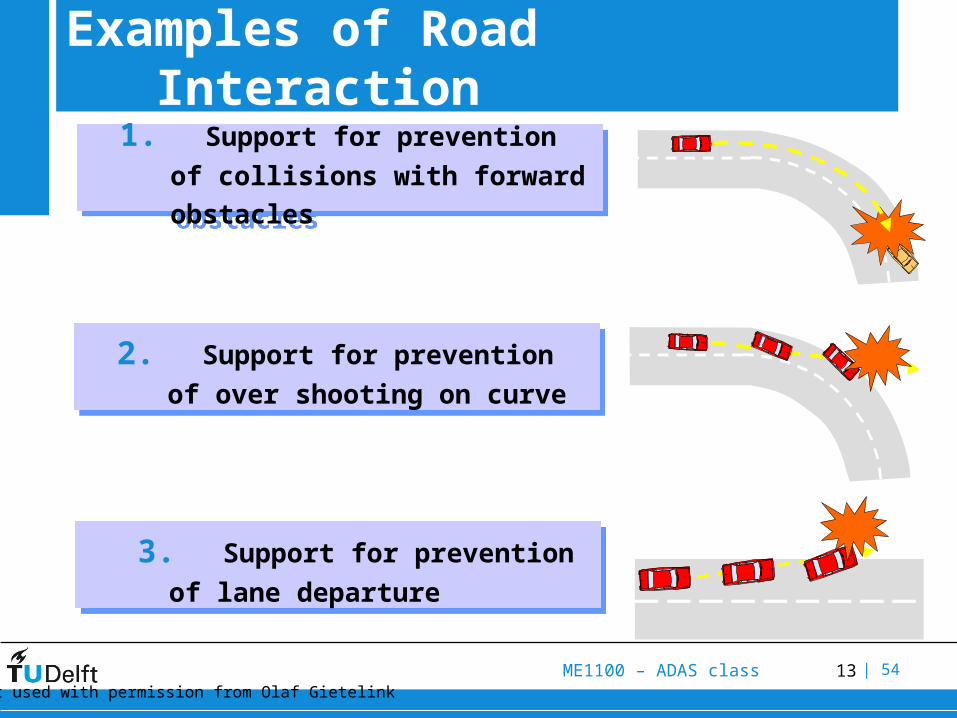
1. Support for prevention of collisions
with forward obstacles
1. Support for prevention of collisions
with forward obstacles
3. Support for prevention of lane
departure
3. Support for prevention of lane
departure
2. Support for prevention of over
shooting on curve
2. Support for prevention of over
shooting on curve
Sheet used with permission from Olaf Gietelink
Examples of Road Interaction
14ME1100 – ADAS class | 54
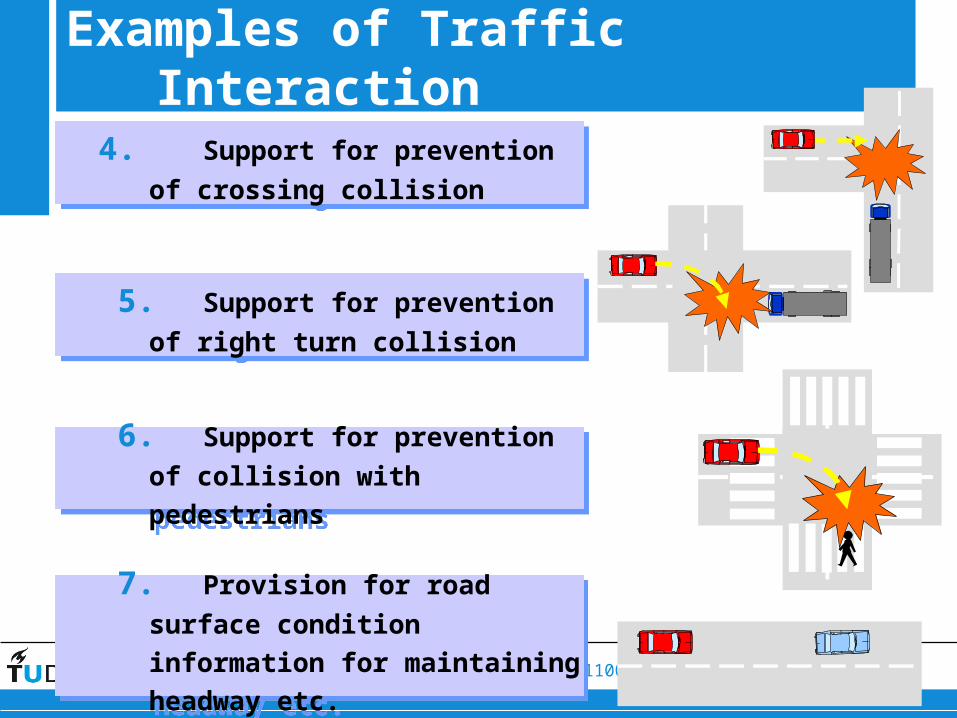
4. Support for prevention of crossing
collision
4. Support for prevention of crossing
collision
5. Support for prevention of right
turn collision
5. Support for prevention of right
turn collision
6. Support for prevention of
collision with pedestrians
6. Support for prevention of
collision with pedestrians
7. Provision for road surface
condition information for
maintaining headway etc.
7. Provision for road surface
condition information for
maintaining headway etc.
Examples of Traffic Interaction

15ME1100 – ADAS class | 54
Trend towards automation
• The ‘aviation comparison’ – make driving like flying• What are the differences?
• Main obstacles for full automation?• Standardization of infrastructure, road users
• Legislation
• Preference..?
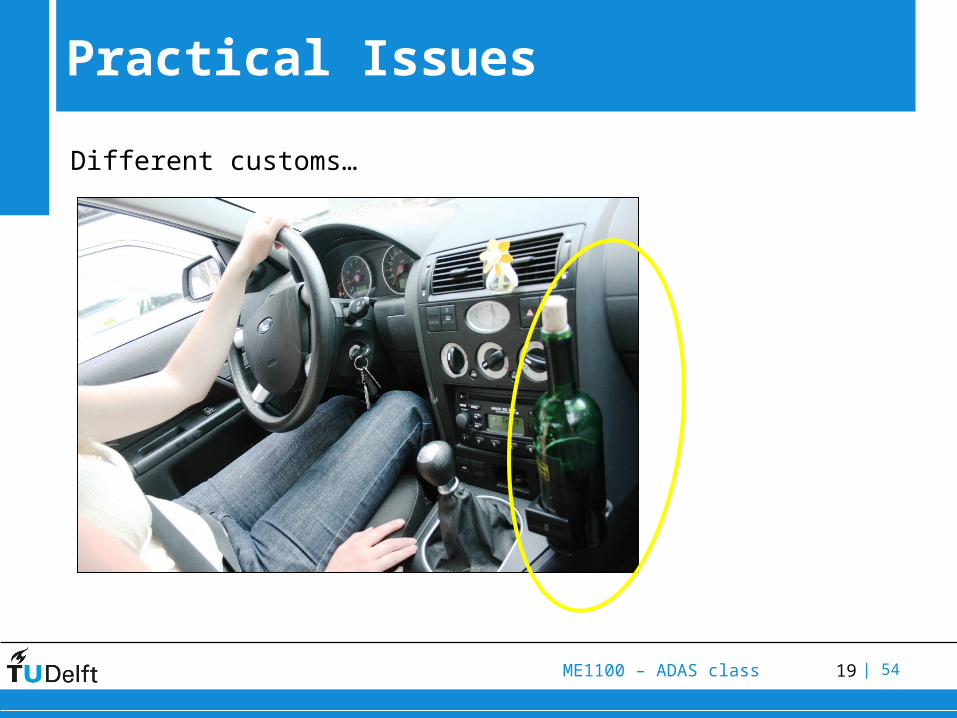
• A short trip to Transylvania shows some of these practical issues…
PATH

16ME1100 – ADAS class | 54
Different road users and hazards
Practical Issues
17ME1100 – ADAS class | 54
Different drivers
Practical Issues

18ME1100 – ADAS class | 54
Different laws, different traffic situations
Practical Issues
19ME1100 – ADAS class | 54
Different customs…
Practical Issues

20ME1100 – ADAS class | 54
Different parking possibilities…
Practical Issues

21ME1100 – ADAS class | 54
Future…?

22ME1100 – ADAS class | 54
ADAS - enabling technologies & examples
- automation vs manual control

23ME1100 – ADAS class | 54
Control• Power steer, ABS• X-by-wire (steer, brake, gas)
Sensors• For road boundaries, road users, location, speed etc…• Important Properties:
• Range & Resolution• Signal Detection Properties
• Misses, False Alarms
• Robustness to• Different weather types
• Different road conditions
• Time delay
Enabling Technologies
26ME1100 – ADAS class | 54
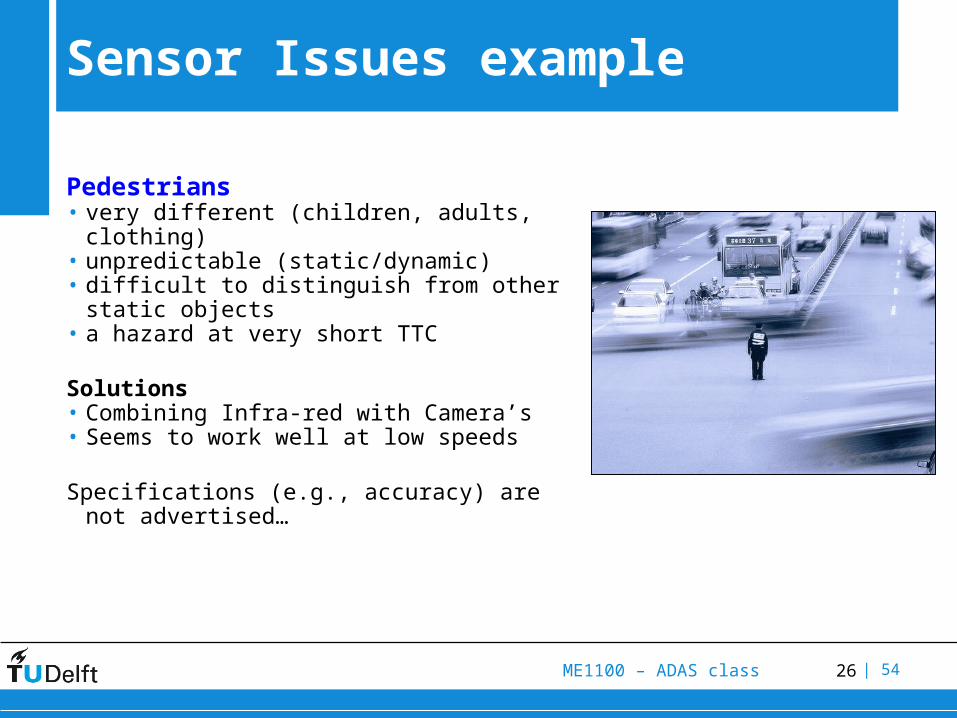
Pedestrians• very different (children, adults, clothing)• unpredictable (static/dynamic) • difficult to distinguish from other static
objects • a hazard at very short TTC
Solutions• Combining Infra-red with Camera’s• Seems to work well at low speeds
Specifications (e.g., accuracy) are not advertised…
Sensor Issues example
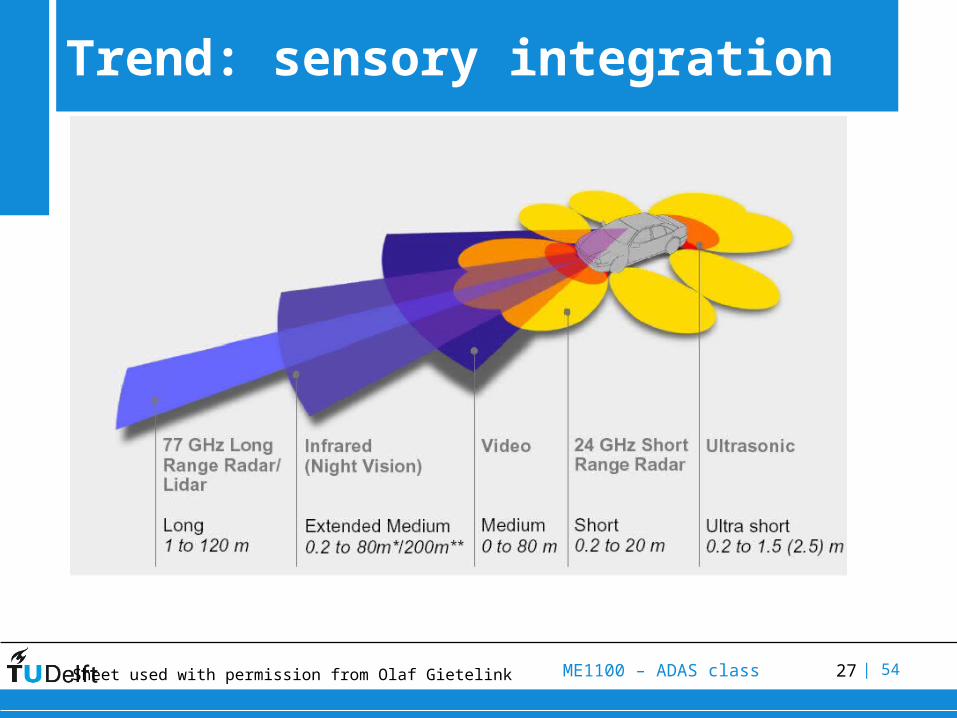
27ME1100 – ADAS class | 54Sheet used with permission from Olaf Gietelink
Trend: sensory integration

28ME1100 – ADAS class | 54
Support a (sub) task
1. Calculate Critical Thresholds2. Generate Warning Signal
• Visual (continuous)• Auditory (binary)• Haptic (binary)
Issues• Setting the threshold
• Different driver needs• Cry-wolf effect
• Nuisance
Automate a (sub) task
1. Calculate Optimal Control2. Define System Authority
Boundaries3. Define how to communicate the
boundaries4. Automate a task within authority
boundaries
Issues• Over-reliance• Complacency• Handing back control • People want to drive
themselves
And then what do we do??

29ME1100 – ADAS class | 54Sheet used with permission from Olaf Gietelink
And then what do we do??

30ME1100 – ADAS class | 54
Low Criticality• Navigation, Parking• Speed Control
Medium Criticality• Car Following (+ stop-and-go traffic interaction) • Lane Keeping, Lane Changing
High criticality• Pre-crash warning• Collision Avoidance• Pedestrian Protection
Target Areas for ADAS

31ME1100 – ADAS class | 54
Support
Navigatione.g., TomTom
Parkingauditory warnings
Speed ControlISA (haptic gas pedal)
Automation
Navigation -
Parking 2004 Toyota 2007 Lexus
Speed ControlCruise Control
ADAS examples: low criticality

32ME1100 – ADAS class | 54
Support
Car Following2008 Nissan – Continuous
Haptic Feedback on Gas Pedal
Lane Keeping /ChangingAuditory warningsHaptic warnings (Volvo, Nissan)
Automation
Car FollowingACC
Lane Keeping /Changing-
ADAS examples: medium criticality

33ME1100 – ADAS class | 54
• Blind Spot Monitoring (Volvo)
• Merging Support (for trucks)
Auditory/Visual Warnings
Some research, some commercialized
ADAS examples: lane change support

34ME1100 – ADAS class | 54
Auditory/Visual WarningsRemains research so far.. (movie)Haptic Lane Keeping Systems
e.g., Nissan
Provides vibrations when crossing lane
ADAS examples: medium criticality
35ME1100 – ADAS class | 54
ACC (movie)
e.g., Nissan, BMW, MercedesLimited to highway situations (small decelerations)
ADAS examples: medium criticality
Will be further discussed in a case study…

36ME1100 – ADAS class | 54Sheet used with permission from Olaf Gietelink
Own Car
Static Object
• What is critical? • small Time-to-Collision: small separation at high relative velocity• TTC < 1.2 usually results in a crash
• Human response time• perception & decision = 0.2 – 2 s• motor control (moving foot from gas to brake) = 0.2 s
• Car Dynamics• approximate maximum deceleration = 10 m/s2
ADAS examples: high criticality

37ME1100 – ADAS class | 54
Support
Collision Avoidance Support - Pre-crash Warning
Automation
Collision Avoidance Automation
Sheet used with permission from Olaf Gietelink
ADAS examples: high criticality

38ME1100 – ADAS class | 54
Main issue
Individually, most of these systems are shown to be beneficial, but…
..how to integrate all these systems, without annoying or confusing the driver?
39ME1100 – ADAS class | 54
Case study: ACC

40ME1100 – ADAS class | 54
ACC functionality• maintain a set cruising speed unless a slower vehicle is
detected ahead• then follow at a safe distance (time headway)
• vehicle equipped with distance sensor (radar/lidar/vision) + automatic throttle & braking
• Full Speed Range ACC: ACC + Stop & Go (“IRSA”)
Sheet used with permission from Olaf Gietelink
Adaptive Cruise Control

41ME1100 – ADAS class | 54
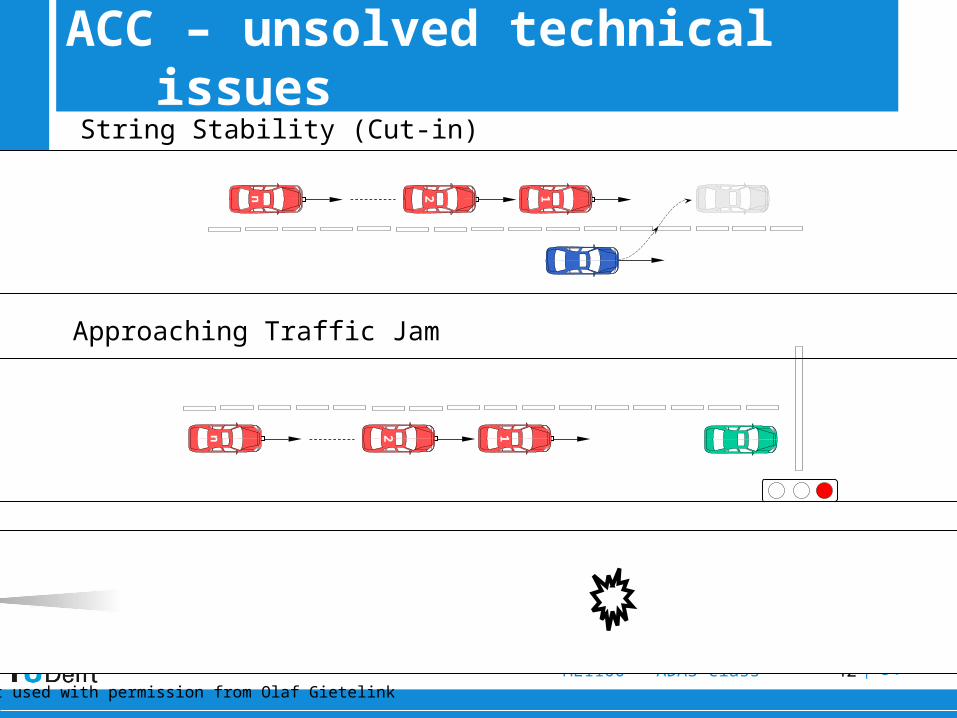
Technical limitations of ACC• Maximum range of sensors ~150 meter• Direct line of sight necessary• Frequent false and missed detections• Time headway usually set around 1.5 s, which degrades traffic
flow
Human Factors• How to communicate technical limitations to driver?• How to switch control authority?
Sheet used with permission from Olaf Gietelink
Benefits• Also works during driver inattention• Speeds up deceleration response
• Human time delays don’t apply
ACC - benefits & limitations
42ME1100 – ADAS class | 54
String Stability (Cut-in)
Approaching Traffic Jam
12n
12n
Sheet used with permission from Olaf Gietelink
ACC – unsolved technical issues

43ME1100 – ADAS class | 54
Benefits• not solely dependent on noisy environment sensors• extra vehicle information enhances ACC functionality
(e.g. feedforward of target vehicle acceleration, which is difficult to measure using a radar)
(sn , vn , an)
vehicle-vehiclecommunication
(s2 , v2 , a2) (s1 , v1 , a1)Sheet used with permission from Olaf Gietelink
Vehicle-to-vehicle communication

44ME1100 – ADAS class | 54
• Increased sensor range and redundancy• Extra vehicle information: look ahead multiple vehicles• Smaller time headway possible with higher level of safety
wireless communication
Sheet used with permission from Olaf Gietelink
Vehicle-to-vehicle communication?

45ME1100 – ADAS class | 54
TNO Real-world experiments: approaching traffic jam
12n
Conventional ACC Cooperative ACC
Sheet used with permission from Olaf Gietelink
Vehicle-to-vehicle communication
>> More in class 4 by Mehdi Saffarian

46ME1100 – ADAS class | 54
Unresolved Issue: Automation and Driver
Driver authority For all driving situations
Now on market: only partial automation
• Technical Reliability
• Laws & Regulations
• Acceptation (driver, society)
Partial automation -> automation boundaries
Still driver has tasks• Detect system failures
• Be aware of automation
boundaries
• Give and take authority
AutomationAuthorityNow on market
AutomationAuthority
Now technically possible
System failure
Driver does not understand
Driver authority For all driving situations
47ME1100 – ADAS class | 54
Designing for humans – remember…
Humans can adapt to system and strange situations• Very well & very quickly• Both visual control and neuromuscular control
Good, but… adaptation might cause effort or annoyance:
human adaptation is not necessarily good!
Better: engineers should understand driver to help design and evaluate systems that are - more comfortable
- better accepted by driver- safer

48ME1100 – ADAS class | 54
Human-machine interface
When driver and automation share tasks…… there is need for human-machine interfaceGood human-machine interface will allow quicker market release of automation systems
Issue 1. Does human understand automation?• Automation boundaries & Detected system failures
Current human-machine interface • Communicate through visual or auditory warning signals
Issue 2. Does automation understand human?• Desired trajectories, safety boundaries, strengths & limitations
Current human-machine interface:• Driver can only switch on/off (binary)• Driver can only provide some set-points for automation
We think: Use Haptic Shared Control (forces, stiffness) based on driver modeling and identification
We think: Use Haptic Shared Control (forces, stiffness)based on driver modeling and identification
49ME1100 – ADAS class | 54
Automation
Manual Control
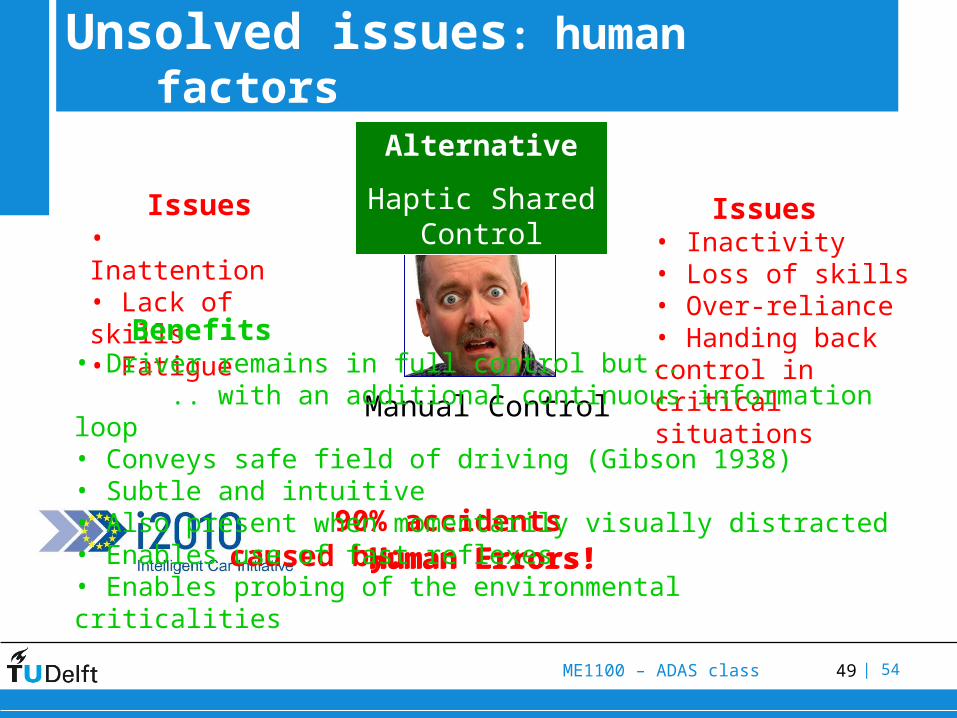
Issues• Inactivity• Loss of skills• Over-reliance• Handing back control in critical situations
Alternative
Haptic Shared Control
Human Errors!
Issues• Inattention• Lack of skills• Fatigue
Human Errors! 90% accidents caused by:
Benefits• Driver remains in full control but..
.. with an additional continuous information loop • Conveys safe field of driving (Gibson 1938)• Subtle and intuitive• Also present when momentarily visually distracted• Enables use of fast reflexes• Enables probing of the environmental criticalities
Unsolved issues: human factors

50ME1100 – ADAS class | 54
Shared Control Metaphor

51ME1100 – ADAS class | 54
2002-2005 Nissan Project: Design Force Feedback Gas Pedal & Evaluation using Neuromuscular Analysis
International collaboration with universities in USA, Canada and Japan
Jan 2008 Market launch by Nissan - in Japan and USA as Distance
Control Assist (in Nissan Infiniti)
Pedal Depression
Ped
al Forc
e
Continuous Force Feedback
Own car2006-current Nissan Projects: • Neuromuscular Analysis of Steering
Example: Haptic Gas Pedal

52ME1100 – ADAS class | 54
Modeling Human-automation interaction

53ME1100 – ADAS class | 54
Manual Control
Machine perfor-mance
Environment
Slow (>200 ms) visual feedback
Fffw
goal
Xdesired
SteeringAngle
Xc
NMS
SW
IM
Tasks:Lane Keeping
Curve NegotiationEvasive Maneuver

54ME1100 – ADAS class | 54
Automation
Machine perfor-mance
Environment
Slow (>200 ms) visual feedback
Fffw
goal
Xdesired
SteeringAngle
NMS
SW
IM
goal Xopt
Controller
S
AutomationSystem
Xc
55ME1100 – ADAS class | 54
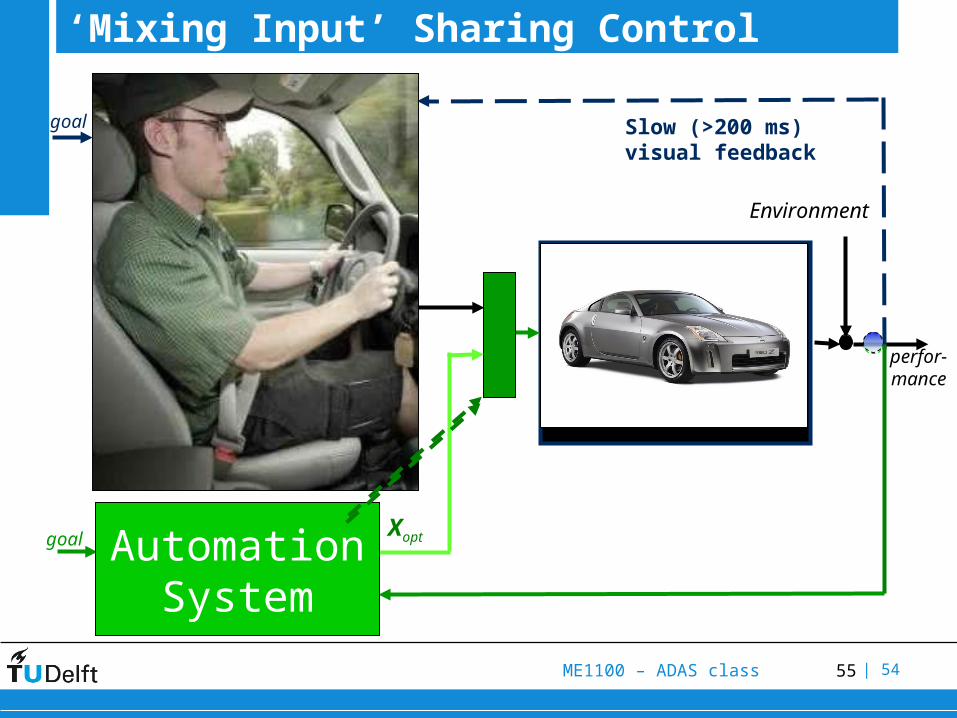
‘Mixing Input’ Sharing Control
Machine perfor-mance
Environment
Slow (>200 ms) visual feedback
goal
goal XoptAutomationSystem

56ME1100 – ADAS class | 54
Haptic Guidance
Machine perfor-mance
Environment
Slow (>200 ms) visual feedback
Fffw
goal
Xdesired
SteeringAngle
NMS
SW
IM
goal
Fguidance
Controller
S
SupportSystem
Xc
57ME1100 – ADAS class | 54
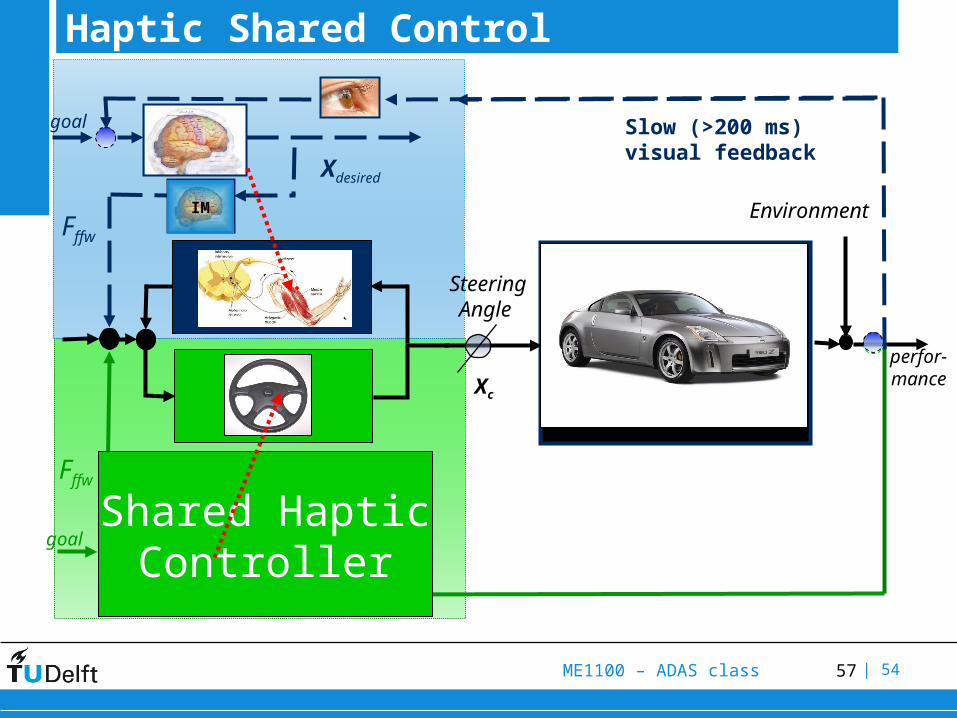
Haptic Shared Control
Machine perfor-mance
Environment
Slow (>200 ms) visual feedback
Fffw
goal
Xdesired
goalXopt
SteeringAngle
Xc
Fffw
Controller
NMS
SW
IM
IM
S
AutomationSystem
Shared HapticController

58ME1100 – ADAS class | 54
T
Xsw0
Example of “No Guidance Forces”
Steering Wheel Normally passive

59ME1100 – ADAS class | 54
T
Xsw0
Example of “Normal Guidance”
Steering Wheel Can generate feedback forces
but: driver can relax, resist or
give way
Xopt

60ME1100 – ADAS class | 54
T
Xsw0
Delft Approach to Haptic Shared ControlAbbink & Mulder (2009) – Exploring the dimensions of haptic feedback support in manual control
Joint patent with Nissan (2008)
Steering Wheel Can generate feedback forces
Can modify impedancedynamically shift
authorityin changing criticality
Xopt

61ME1100 – ADAS class | 54
Single path vs Multiple Paths
Problem: How to support multiple paths?
• How to support lane changes? • Tsoi et al. (2010) IEEE SMC Conference
• How to support multiple evasive paths?• Della Penna et al. (2010) IEEE SMC Conference
• Ideally, human should make the choice• Creative solutions may be needed
• Liability
62ME1100 – ADAS class | 54
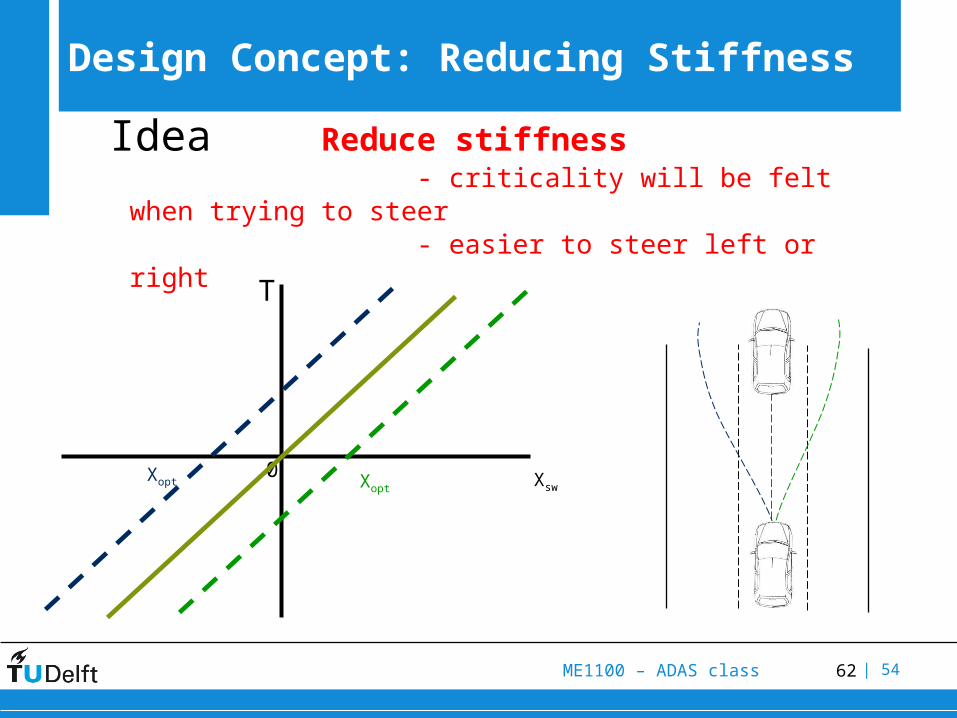
T
Xsw0
Design Concept: Reducing Stiffness
Idea Reduce stiffness - criticality will be felt when trying
to steer- easier to steer left or right
Xopt Xopt

63ME1100 – ADAS class | 54
T
Xsw0
Design Concept: Reducing Stiffness
Xopt
Stiffness Can become negative in extreme cases
- a choosing human is supported to avoid obstacle, and is then “caught” by the support - a stubborn human needs to increase own stiffness to avoid steering left or right

64ME1100 – ADAS class | 54
Final Design of the system
T [
Nm
]
[deg]
fright
θright
fleft
STW
θleft
• Algorithm makes a smooth transition between the three lines
• Shape adapts online, depending on available time to choose (Steering Time Window)
• Also takes into account the initial heading, velocity and position of the vehicle with respect to the object
• Details are described in paper
Spring 2010 filed this idea as patent

65ME1100 – ADAS class | 54
Design Philosophy for Automation
Haptic Shared Control is a unified approach
• Continuous sharing of control authority through forces• No more binary switches (on/off), but smooth shifting
• Driver is better aware of situation and system intent
• Drivers can always overrule the system
• Can be based on any automation system that generates ‘optimal steering inputs’ (visual controller)
• Allows driver to use fast reflexes and neuromuscular adaptation (low-level neuromuscular controller)

66ME1100 – ADAS class | 54
Additional Benefits
- Allows automation system to adapt to human controller• Visual & neuromuscular control strategy• Different drivers ; different states of a driver
To design a system with these benefits, we need: • Computational driver model
• Visual & neuromuscular control• Feedback and feed-forward behaviour• Allows prototyping through models
• Time-variant evaluation/identification techniques

67ME1100 – ADAS class | 54
Take Home Message

68ME1100 – ADAS class | 54
Increasing Technology Developments• More and better sensors• Vehicle-to-Vehicle and Vehicle-to-Road communication will
increase possibilities of support and automation
Automotive trends• Current focus mainly on comfort, and safety• Bias towards automation or binary warnings• Haptics & shared control is an interesting alternative
Issues• Traffic complexity & Standardization• Human factors: how to integrate all information and support
systems?
What will be the role of the human?• What tasks should the driver be doing?• What happens to the fun in driving?
Take Home Message

69ME1100 – ADAS class | 54
Questions?