3/8/2004 -- 1 ima workshop passivity approach to dynamic distributed optimization for network...
Post on 19-Dec-2015
212 views
TRANSCRIPT

3/8/2004 -- 1 IMA Workshop
Passivity Approach to Dynamic Distributed Optimization for Network Traffic Management
John T. Wen, Murat Arcak, Xingzhe Fan
Department of Electrical, Computer, & Systems Eng.
Rensselaer Polytechnic Institute
Troy, NY 12180

3/8/2004 -- 2 IMA Workshop
Network Flow Control ProblemDesign source and link control laws to achieve:
stability, utilization, fairness, robustness
. .
Rf
Rbq N
x N y L
p L
: capacityc: queueb
Forward routing matrix (including
delays)
Return routing matrix (including delays)
N sources L links
Source control
. .
link control
diagonal diagonal
Adjust sending rate based on congestion indication
(AIMD, TCP Reno, Vegas)
AQM: Provide congestion information
(RED, REM, AVQ)
0max ( ) , i i
xi y
U x Rx c
0 0
minmax ( ) ( )i ip xi
U x p y c
Optimization approach: Kelly, Low, Srikant, …

3/8/2004 -- 3 IMA Workshop
Passivity
A System H is passive if there exists a storage function V(x) 0 such that for some function W(x) 0
Hu y
x
( ) TV W x u y
If V(x) corresponds to physical energy, then H conserves or dissipates energy. Example: Passive (RLC) circuits, passive structure, etc.

3/8/2004 -- 4 IMA Workshop
Passivity Approach: Primal
RT R
h
( ( ) )xx K U x q +
-
-p
p
-q x y
y
Kelly’s Primal Controller
+
-
-(q-q*)
-(U’(x)-U’(x*))s-1 IN
K
g1
RT R+
-
-(p-p*)
p-p*
-(q-q*) x-x*
y-y*
s IL
s-1 ILh1
+
-
-(q-q*)
-(U’(x)-U’(x*))
(D+C(sI-A)-1B)
s-1 INg1
x
x
( '( ) )xx K U x q
x
y
y
*
* * * *
Lyapunov Function (Kelly, Mauloo, and Tan '98):
( ( ) ( )) ( ) ( ( ) ( ))yT
i i i i yi
V U x U x q x x h h y d
*
* * * *
Lyapunov Function:
1( ( ( ) ( )) ( )) ( ( ) ( ))2
yTi i i i i i i i i i y
i
V P U x U x q x x h h y d

3/8/2004 -- 5 IMA Workshop
Extension
• First order dual: (y-y*) to (p-p* ) is also passive
• Implementable using delay and loss
Passive decomposition is not unique:• For first order source controller, the system
between –(p-p*) and (y-y*) is also passive.
RT R+
-
-(p-p*)
p-p*
-(q-q*) x-x* y-y*
y-y*
x=K(U’(x)-q)+x
.
h1
* 1 *
Lyapunov Function:
1( ) ( )
2TV x x K x x
If U’’<0 uniformly (strictly concave), contains a negative definite term in x-x* ---important for robustness!
V
* 1 *
Lyapunov Function:
1( ) ( )
2TV p p p p
p
b
c max max
max
or ( and )( )
and 0 b
b b b b y cy cb
b b y cy c

3/8/2004 -- 6 IMA Workshop
Passivity Approach: DualLow’s Dual Controller
RT R
-U’-1+
-
q
-q
px
y
x
= (y-c)+bb
.
= (y-c+ b)+pp
.
RT R
g1-1+
-
q-q*
-(q-q*)
p-p*
x-x*
y-y*
x-x*
= (y-c+ b)+pp
. = (y-c)+bb
.q.
q.
- s-1IL
sIL
p .
y - c ( )s
s
D+C(sI-A)-1By - c
p .
*
2 * ' 1
Lyapunov Function:
( *) ( ( ))2
i
i
qTmm i iq
im
cV c y p x U d
b
*
2* ' 1
Lyapunov Function (Paganini 02):
( *) ( ( ))2
i
i
qTi iq
i
bV c y p x U d
*
* ' 1
First Order Law
( )
Lyapunov Function:
( *) ( ( ))i
i
p
qTi iq
i
p y c
V c y p x U d

3/8/2004 -- 7 IMA Workshop
Passivity Approach: Primal/Dual Controller
RT R+
-
-p
p
-q x y
y
x= K (U’(x)-q))+x
.
p = (y - c)+p
.
• Consequence of passivity of first order source controller and first order link controller: combined dynamic controller is also stable.
• Generalizes Hollot/Chait controller and easily extended to Kunniyur/Srikant controller.

3/8/2004 -- 8 IMA Workshop
Simulation: Primal Controller1
1
loop gain: '( )( ( ) ( )) ( )
0.1( 1)( ) (0.1) or ( )
20
T
i i i i i
Rh Rx sI W s U x W s R
sW s k D C sI A B
s
.25 sec delay
(A1:Kelly)
(B1:Passive)
A1: 21.9rad/s, PM 108.2
B1: 8.4rad/s, PM 155.5
ogc
ogc
max
max
max
LTI PM/
A1: 0.086sec
B1: 0.322sec
gcT
T
T
3/8/2004 -- 9 IMA Workshop
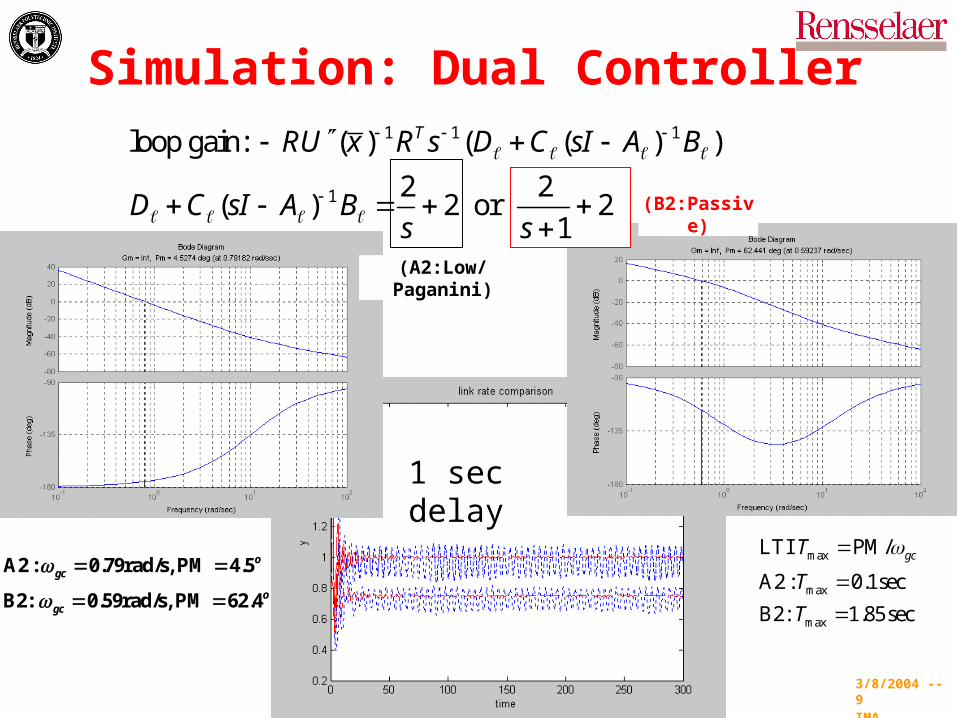
Simulation: Dual Controller
1 sec delay
(A2:Low/Paganini)
(B2:Passive)
1 1 1
1
loop gain: ( ) ( ( ) )
2 2( ) 2 or 2
1
TRU x R s D C sI A B
D C sI A Bs s
A2 : 0.79rad/s, PM 4.5
B2: 0.59rad/s, PM 62.4
ogc
ogc
max
max
max
LTI PM/
A2 : 0.1sec
B2: 1.85sec
gcT
T
T

3/8/2004 -- 10 IMA Workshop
Robustness in Time Delay
typ p h y
x
x K U x q
R lisR e
• Passivity approach provides Lyapunov function candidates to compute quantitative trade-offs between disturbance and performance, and stability bounds on delays.
Rq x
x
x K U x q
p h y
TR_
yp2d
1d
* 1 *
Lyapunov Function:
1( ) ( )
2TV x x K x x

3/8/2004 -- 11 IMA Workshop
Extension to CDMA Power Control• Passivity approach is applicable to other
distributed optimization problems: minimize power subject to the signal-to-interference constraint.
w p
_
2
1y
y
Th
yq
1
M
2
h
Base Station
Mobiles
CDMA Power Control:
2
i
+
i i i ii i i i
i k kpk
dF pp = -λ + q q
dp L p
2
max ( ( )) ( )
SIR: ( )
( ) ln( )
i i i ip
i ii
k kk i
i i i i i
U p F p
L pp
L p
U L

3/8/2004 -- 12 IMA Workshop
Extension to Multipath Flow Control
• Traffic demand in multipath flow control can be incorporated as additional inequality constraints. Same passivity analysis applicable with demand pricing feedback based on r-Hx.
0max ( ) subject to ,i i
xi zy
U x Rx c Hx r
x1
x2
x1
x2
x3 x4 x5
x3 x4x5
z1=x1+x2 ≥ r1
z2=x3+x4+x5 ≥ r2