adaptive passivity–based control for maximum power...
TRANSCRIPT

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Adaptive Passivity–based Control for Maximum PowerExtraction of Stand–alone Windmill Systems
Romeo Ortega†, Fernando Mancilla–David‡ and Fernando Jaramillo†
†LSS, Supelec, France‡University of Colorado Denver, USA
Layout
Mathematical model of the small scale windmill system
Wind Speed estimator
Passivity–based controller
Simulation results
Conclusions and future work
Aalborg, November 28, 2011 – p. 1/19
CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
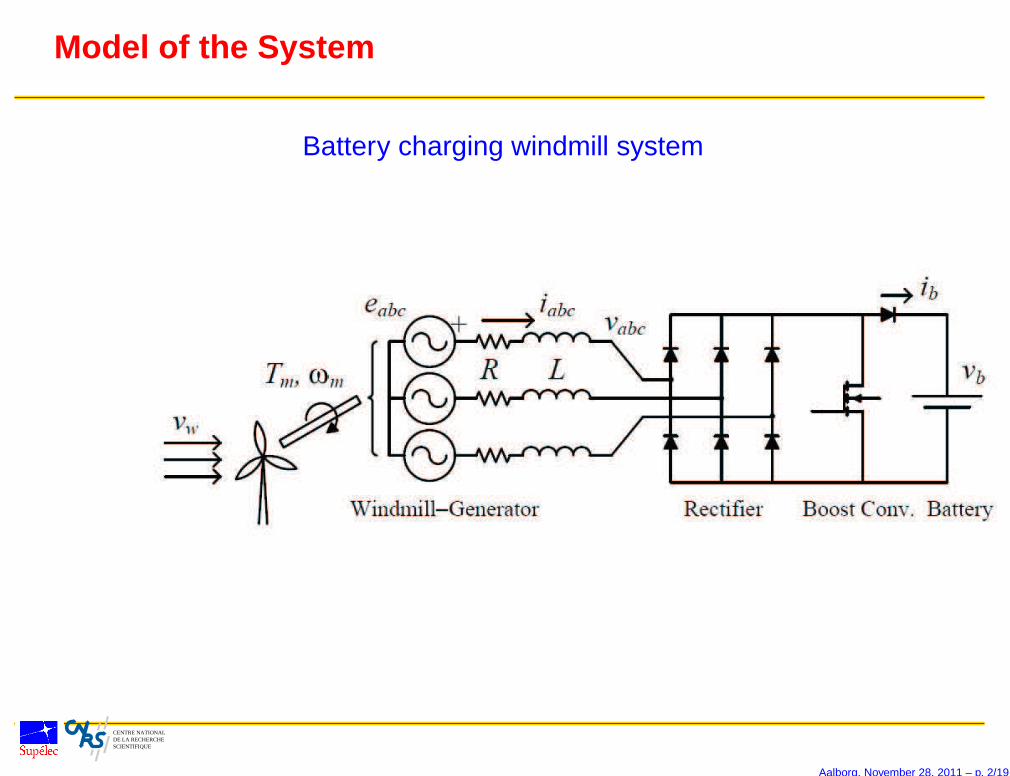
Model of the System
Battery charging windmill system
Aalborg, November 28, 2011 – p. 2/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
PM Synchronous Generator and Wind Turbine
In the rotor (dq) reference frame
Lid = −Rid + LiqP2ωm − vd,
Liq = −Riq − LidP2ωm + φωe − vq,
where id, iq , vd, vq , are the currents and voltages in the dq reference frame, L and R
are the stator winding’s inductance and resistance, ωm is the mechanical speed, φ isthe permanent magnetic flux, and P is the number of pole pairs.
The mechanical dynamics, with J the rotor inertia,
Jωm =Pw
ωm︸︷︷︸
Tm
−3
2
P
2φiq
︸ ︷︷ ︸
Te
.
The mechanical power at the windmill shaft
Pw =1
2ρACp(λ)v
3w, λ :=
rωm
vw.
with vw the unknown wind speed and Cp(λ), the power coefficient.
Aalborg, November 28, 2011 – p. 3/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Rectifier, dc/dc Converter and Full Model
dq model
vd = id√
i2d+i2q
MvbD,
vq =iq
√
i2d+i2q
MvbD.(1)
where is the vb battery voltage, M = π
3√
3is the gain of the passive diode rectifier and
D the duty ratio.
Overall system
Lx1 = −Rx1 + L1x2x3 − C1x1u
Lx2 = −Rx2 − L1x1x3 + φ1x3 − C1x2u (FM)
J1x3 = −φ1x2 +Φ(x3, vw),
with x := col(id, iq, rωm), the input u := D√
x2
1+x2
2
, and the function
Φ(x3, vw) := C2
v3w
x3
Cp
(x3
vw
)
. (2)
Aalborg, November 28, 2011 – p. 4/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Control Problem
Operate the system at the point of maximum power extraction λ⋆ := argmaxCp(λ),
which is typically known.
If vw is known the control task is the regulation of ωm around the reference speed
ω∗m =
λ⋆vw
r=:
1
rx3⋆.
An on–line wind speed estimator is added to generate
ω∗m =
λ⋆vw
r.
The problem is translated into asymptotic stabilization of the desired equilibriumx⋆ = (xs
1⋆, x2⋆, x3⋆)
Remark Nonlinearly parameterized nonlinear system, hence linear control and standardestimation are not applicable. Solved using passivity–based control (PBC) (Ortega, et al.,Springer Book ’98) and immersion and invariance (I&I) adaptation principles (Astolfi andOrtega, TAC’03, Springer Book ’07).
Aalborg, November 28, 2011 – p. 5/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Assumptions for Wind Speed Estimation
Assumption 1 The power coefficient is aknown, smooth, function
Cp : [0, λM ] → R+,
which verifies
C′p(λ)
> 0 for λ ∈ [0, λ⋆)
= 0 for λ = λ⋆
< 0 for λ ∈ (λ⋆, λM ],
where λ⋆ := argmaxCp(λ).
λ
Cp
λ∗
Cp∗
Assumption 2 The wind speed vw is an unknown positive constant.
Assumption 3 The electrical torque Te and the motor speed wm are measurable.
Assumption 4 For all λ ∈ (0, λ⋆), the power coefficient verifies
3
λCp(λ) > C′
p(λ).
Aalborg, November 28, 2011 – p. 6/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Some Remarks
Cp(λ) can be easily obtained from experimental data, and the algorithm implementedfrom a table look–up.
Constant wind speed assumption only needed for the theory. An on–line estimator isable to track slowly–varying parameters, assumption justified by the time scaleseparation between the wind dynamics and the mechanical and electrical signals.
On–line estimators average the noise—in contrast with differentiator–based orextended Kalman filter schemes currently used.
Measuring wm and Te is standard practice in windmill systems.
Theory applicable also if blade pitch β is included, i.e., Cp(λ, β), or for more completedescriptions of the mechanical dynamics.
Assumption 4 is satisfied in normal operating range (for Region 2), where the torquecoefficient has negative slope. Indeed,
CT (λ) :=1
λCp(λ),
satisfies
C′T (λ) ≤ 0 ⇒ Assumption 4.
Aalborg, November 28, 2011 – p. 7/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Main Estimation Result
Proposition (Ortega, et al., IJACSP’12) Consider the system (FM), verifying Assumptions1–4. The I&I estimator
˙vIw = γ
[
Te −ρA
2
(vIw + γωm)3
ωm
Cp
(rωm
vIw + γωm
)]
vw = vIw + γωm,
where γ > 0, is an adaptation gain, is asymptotically consistent, that is,
limt→∞
vw(t) = vw.
Aalborg, November 28, 2011 – p. 8/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Simulation Results: Periodic Wind
Done in Vestas professional software, with the full model, look–up table for Cp(λ), and realwind data.
−100 0 100 200 300 400 500 6008
10
12
14
16
18
20
22
Time (s)
Win
d S
peed
(m
/s)
WSEstimated WS
Aalborg, November 28, 2011 – p. 9/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Simulation Results: Turbulent Wind
−100 0 100 200 300 400 500 60010
12
14
16
18
20
22
Time (s)
Win
d S
peed
(m
/s)
WSEstimated WS
Aalborg, November 28, 2011 – p. 10/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Simulation Results: Gust
140 160 180 200 220 240 260 280
12
13
14
15
16
17
18
19
Time (s)
Win
d S
peed
(m
/s)
WSEstimated WS
Aalborg, November 28, 2011 – p. 11/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
An Asymptotically Stable PBC with Known Wind Speed
Proposition Consider the system (FM), with known wind speed, in closed–loop with thePBC
Lx1d = −Rx1d +L1
φ1
Φ(x3⋆, vw)x3 − C1x1u
J1x3d = −Φ(x3⋆, vw) + Φ(x3, vw)−R3a(x3 − x3d)
u = −1
C1x2
[R
φ1
Φ(x3⋆, vw) + L1x1dx3 − φ1x3d], (3)
where R3a > 0 is a damping injection. The equilibrium x⋆ is asymptotically stable.
Remarks
The scheme is made adaptive replacing Φ(x3⋆, vw) by Φ(x3⋆, vw).
An integral action can be added
J1x3d = −Φ(x3⋆, vw) + Φ(x3, vw)−R3a(x3 − x3d) + ξ, ξ = −KIe3,
with KI > 0 an integral gain.
Aalborg, November 28, 2011 – p. 12/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Sketch of the Proof
(FM) written in Euler–Lagrange form (to reveal workless forces):
Dx+ [C(x) +R]x = G(x)u+ b(x),
where
D := diagL,L, J1 > 0, C(x) = −C⊤(x) :=
0 −L1x3 0
L1x3 0 −φ1
0 φ1 0
,
R := diagR,R, 0 ≥ 0, b(x) :=
0
0
Φ(x3, vw)
, G(x) :=
−C1x1
−C1x2
0
.
The systems energy function H(x) = 1
2xTDx, satisfies the power–balance equation
H = −R|idq|2
︸ ︷︷ ︸
dissipation
− |vdq||idq|︸ ︷︷ ︸
elec. power
+2
3Pw,
︸ ︷︷ ︸
mech. power
Aalborg, November 28, 2011 – p. 13/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Energy Shaping and Damping Injection
Idea is to assign a new energy function
W (e) :=1
2e⊤De,
where e := x− xd and xd := col(x1d, x2∗, x3d).The controller can be written as
Dxd + [C(x) +R]xd = b(x) +G(x)u+ udi
where udi is an additional damping injection signal: udi = −Rae. This yields the errorequation
De+ C(x)e+ (R+Ra)e = 0
Taking the derivative of W yields
W = −e⊤(R+Ra)e ≤ −2minR,R3a
maxL, J1W
establishing that e(t) → 0, exponentially fast. Proof completed with some signal chasing toprove that xd(t) → x⋆.
Aalborg, November 28, 2011 – p. 14/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Simulation Results
Power coefficient given by the function
Cp(λ) = e−cp1λ
( cp2
λ− cp3
)
+ cp4λ,
where cp1 = 21.0000, cp2 = 125.229, cp3 = 9.7803, and cp4 = 0.0068—from Matlabpackage. This yields λ∗ = 8.1 and Cp∗ = 0.48.
Windmill/battery system parameters
Item Value
Pole pairs P = 28
Synchronous resistance R = 0.3676 (Ω)
Synchronous reactance L = 3.55 (mH)
Flux φ = 0.2867 (Wb)
Inertia J = 7.856 (kg m2)
Blades radius r = 1.84 (m)
Battery voltage vb = 48 (V )
Aalborg, November 28, 2011 – p. 15/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Wind Speed Estimator
The estimator and controller parameters γ = 0.1, R3a = 0.01 and KI = 1.
0 20 40 60 80 100 1207
8
9
10
11
12
13
t (sec)
Win
dSpee
d(m
/se
c)
Actual: vw
Estimated: vw (γ = 0.1)
Aalborg, November 28, 2011 – p. 16/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Duty Ratio, Power Coefficient and Power Capture
40
60
80
100D
(%)
0.47
0.48
0.49
Cp∗ = 0.48
Cp
(-)
0 20 40 60 80 100 1200
2000
4000
6000
Pw
(W)
t (sec)
Aalborg, November 28, 2011 – p. 17/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Evolution of all States
0
2
4
x1
(A)
x1d
(A)
0
10
20
x2
(A)
x2∗
(A)
0 20 40 60 80 100 12060
80
100
x3
(m/se
c)
t (sec)0 20 40 60 80 100 120
x3d
(m/se
c)
t (sec)
Aalborg, November 28, 2011 – p. 18/19

CENTRE NATIONAL DE LA RECHERCHESCIENTIFIQUE
Future Work
Analysis of the adaptive scheme:
Tough without persistency of excitation!
Consider torsional modes:
Derive I&I estimator.
PBC.
Incorporate torsion minimization considerations.
The stability result is only local, because stable invertibility of the system is needed.
New PBC’s, for Hamiltonian models, obviate this assumption.
But a PDE needs to be solved.
Comparison of adaptive PBC with ω2m–controller. Partial results for adaptive PI.
Can Assumption 4 be relaxed?
It is not (globally) satisfied for several known turbines.
Analysis when it does not hold?
Aalborg, November 28, 2011 – p. 19/19