3d swarm construction
TRANSCRIPT
3D Swarm ConstructionCaleb Wagner, Hannan Liang, Trevor Rizzo, Josue Contreras, Neel Dhanaraj, Cameron Collins
Advisors: Prof. Carlo Pinciroli (RBE/CS), Prof. Gregory Lewin (RBE), Prof. Raghvhendra Cowlagi (ME), Prof. Xinming Huang (ECE)

Abstract“Robotic construction can drastically improve the efficiency and safety of
construction. However, current robotic construction is limited by the types of structures robots can build and the ability for multiple robots to work collaboratively to build structures. This project aims to create an autonomous collective construction system in which two types of robots cooperate: construction robots and smart scaffolding robots. The latter robot type integrates electronics into building materials to create intelligent structures and allows for dynamic reassembling of existing components. In addition, we design a multi-robot collaborative building algorithm that showcases construction both with real and simulated robots. This project is developed so as to establish both a physical and simulated framework for future work with swarm construction algorithms.”
2
Table of Contents1. Introduction2. Prior Work3. Mechanical Design4. Electrical Design5. Software Design6. Results7. Conclusion
3 3D Swarm Construction

Introduction
4

Worcester Polytechnic Institute
Introduction
• Advances in automated construction can address future increased demand in construction
• The automation of construction can improve the safety of workers, especially in hazardous environments
• Multi-robot swarm systems can enable automated construction at larger scales
• Challenges exist in controlling swarms to achieve high-level construction goals
5 3D Swarm Construction

Worcester Polytechnic Institute
Project Novelty
• Formulated a swarm construction platform that builds in 3D with robots that are able to maneuver in 3D
• Produced robust algorithms that achieve desired emergent goals and are scalable to any number of robots
• Improved how robots use information provided by the structure to inform decisions regarding its construction
6 3D Swarm Construction

Prior Work
7

Worcester Polytechnic Institute
TERMES
• Multi-robot construction system• Decentralized system
─ Robots use local information and implicit coordination to successfully create a structure
• Limited to single-path additive structures
─ Physical limitation imposed by blocksand robots
8 3D Swarm Construction
Petersen, K., Nagpal, R., & Werfel, J. (2012). TERMES: An Autonomous Robotic System for Three-Dimensional Collective Construction. Robotics. doi: 10.7551/mitpress/9481.003.0038
Worcester Polytechnic Institute
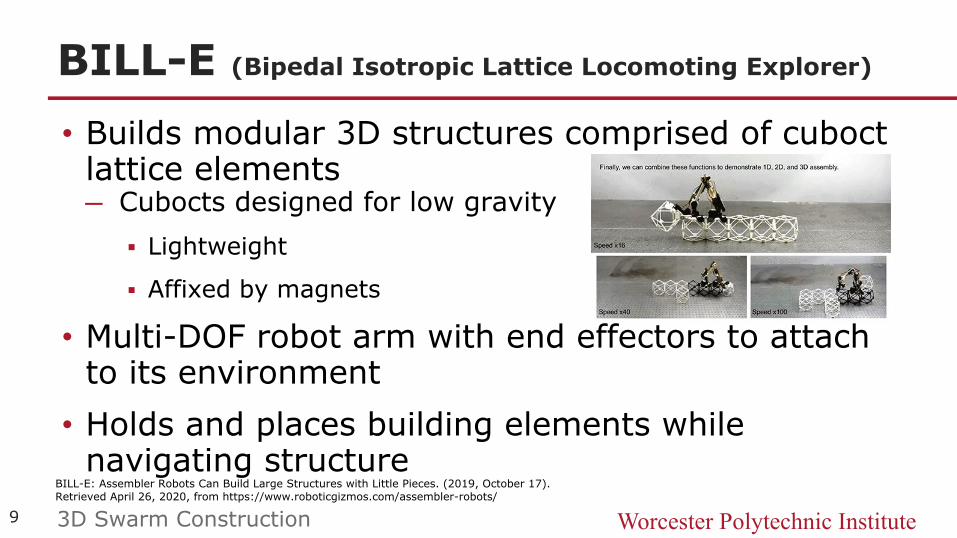
BILL-E (Bipedal Isotropic Lattice Locomoting Explorer)
• Builds modular 3D structures comprised of cuboct lattice elements ─ Cubocts designed for low gravity
▪ Lightweight
▪ Affixed by magnets
• Multi-DOF robot arm with end effectors to attach to its environment
• Holds and places building elements while navigating structure
9 3D Swarm Construction
BILL-E: Assembler Robots Can Build Large Structures with Little Pieces. (2019, October 17). Retrieved April 26, 2020, from https://www.roboticgizmos.com/assembler-robots/

Worcester Polytechnic Institute
SRoCS (Swarm Robotics Construction System)
• Near Field Communication (NFC) and computer vision establish an interface between robots and building blocks
• Robots use building blocks to communicate through stigmergy─ Bio-inspired by ant pheromones
• Shape of assemble structure isnot predetermined
10 3D Swarm Construction
Allwright, M., Bhalla, N., El-Faham, H., Antoun, A., Pinciroli, C., & Dorigo, M. (2014). SRoCS: Leveraging Stigmergy on a Multi-robot Construction Platform for Unknown Environments. Lecture Notes in Computer Science Swarm Intelligence, 158–169. doi: 10.1007/978-3-319-09952-1_14

Mechanical Design
11

Worcester Polytechnic Institute
In order to build a wide variety of structures from block elements the inchworm robot must:
• Navigate structure to place blocks in arbitrary locations─ Traverse in X, Y, and Z directions─ Turn 90o to change direction─ Traverse up and down
▪ Concave corners▪ Convex corners
─ Step up and down a level • Control block throughout the process
Design of Inchworm Robot
12 3D Swarm Construction

Worcester Polytechnic Institute
Linkage Lengths Analysis
• Created mathematical model for inverse kinematics• Calculated minimum link length for inchworm to
minimize joint torque requirements• Robot dimensions
scaled based on block size
13 3D Swarm Construction

Worcester Polytechnic Institute
Robot Dynamic Model
• Established robot dynamic model using Lagrange's equations in order to estimate dynamic joint torques
• Estimated velocities and accelerations for traversal of structure
• Calculated maximum dynamic torque to be 17.5 kg-cm
14 3D Swarm Construction

Worcester Polytechnic Institute
Joint Motor Specification
• Final robot design uses servos rated for maximum dynamic torques experienced with a FoS of 1.7
• Using 30 kg-cm hobby servos─ Inexpensive─ Readily available─ Easily reproduced to create large
swarms
15 3D Swarm Construction

Worcester Polytechnic Institute
Structure Mating Design
• Single 4-40 bolt is used to─ Provide attachment force between
inchworm robot and the structure─ Create strong connections between blocks
to ensure that structures are stable• Dowel pins are used to
─ Align the robot with its environment─ Absorb shear stresses acting on
robot-structure interface• Large chamfers ensure consistent
mating process16 3D Swarm Construction
Worcester Polytechnic Institute
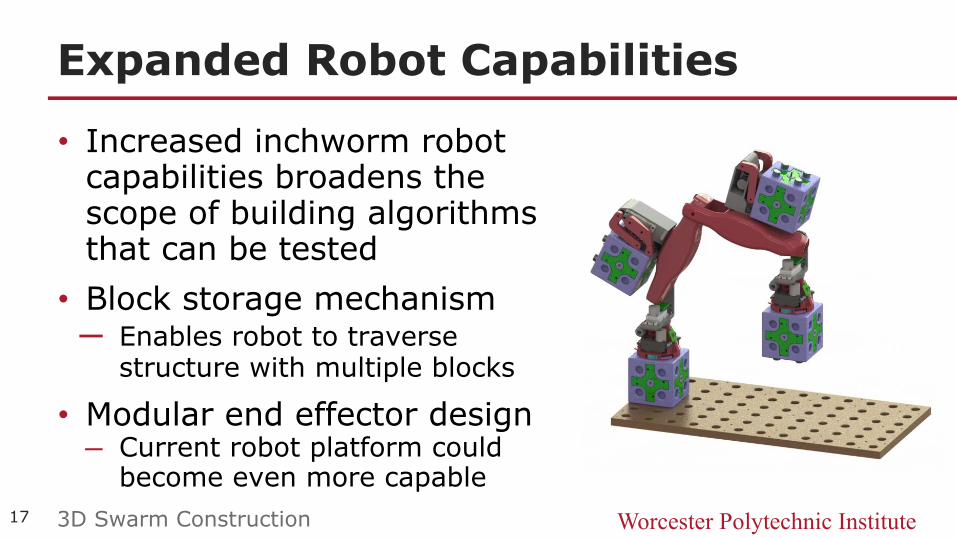
Expanded Robot Capabilities
• Increased inchworm robot capabilities broadens the scope of building algorithms that can be tested
• Block storage mechanism─ Enables robot to traverse
structure with multiple blocks
• Modular end effector design─ Current robot platform could
become even more capable17 3D Swarm Construction

Electrical Design
18

Worcester Polytechnic Institute
Electromechanical Components Overview• Joints
─ Motor (30 kg)─ Motor Controller (20 kHz PWM)─ High Power BEC (9V)─ Encoder (I2C, 14-bit High
Resolution)• Grippers
─ Motor (20 kg)─ H-Bridge (6 V 2 A)─ Hall Effect Sensor ─ Limit Switch
19 3D Swarm Construction
1
2
• Wiring─ Wire Glands for strain
relief between joints

Worcester Polytechnic Institute
Low-Level Control System Hardware
• The Electronic Stack/Hub ─ Components▪ Teensy 3.6 Microcontroller (180 MHz
ARM processor)▪ Raspberry Pi Zero W
─ Functionality▪ Allows for modularity▪ Easy to plug and unplug from robot▪ Robust and compact
20 3D Swarm Construction

Worcester Polytechnic Institute
High/Low-Level System Architecture
21 3D Swarm Construction
The architecture utilizes a small, on board computer for the high-level control, a microcontroller for the low-level controller, and USB serial for communication.

Worcester Polytechnic Institute
Low-Level Control System
• PID Controller─ Each joint has its individual set of PID
values─ Dynamic: the PID values interchange
based on the end effector attached to the structure
• Features─ 5 msec control loop─ Non-blocking gripper control─ Manual PID tuning state
22 3D Swarm Construction

Worcester Polytechnic Institute
Communication Structure
• Kinematic control packet sent to controller over USB serial
• Packet received and parsed by low-level control system
• Packet Information:─ Joint angles commands─ Gripper commands
23 3D Swarm Construction
Worcester Polytechnic Institute
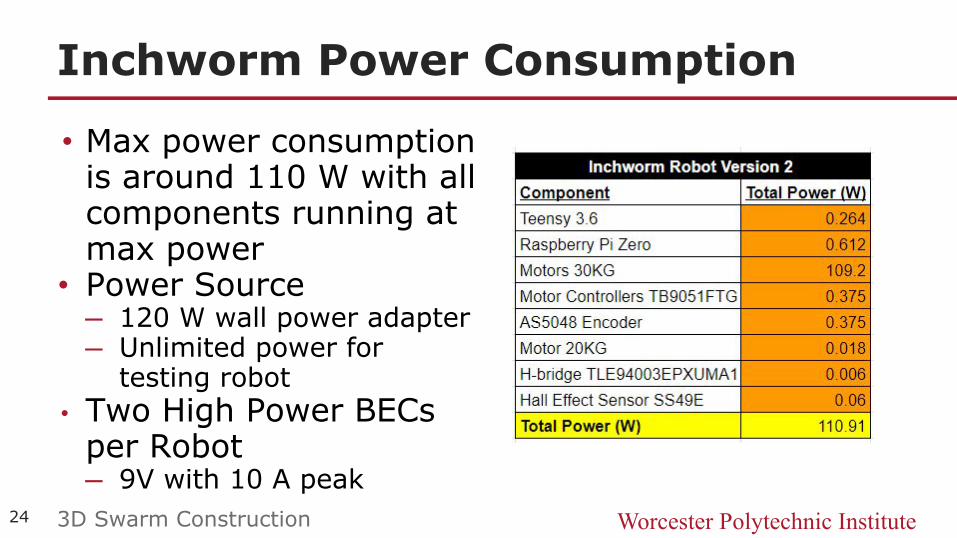
Inchworm Power Consumption
• Max power consumption is around 110 W with all components running at max power
• Power Source ─ 120 W wall power adapter─ Unlimited power for
testing robot• Two High Power BECs
per Robot─ 9V with 10 A peak
24 3D Swarm Construction

Worcester Polytechnic Institute
Smart Structure Concept
By making the 3D structure smart, it is able to communicate the structure’s configuration dynamically and verify an Inchworm’s position within the 3D structure.
25 3D Swarm Construction

Worcester Polytechnic Institute
Smart Structure System
• Structure Status─ Adding blocks
dynamically updates the high level system
• Heartbeat Protocol─ Allows system to identify
if block is missing• Robot Position
─ Robot can request position in respect to structure
26 3D Swarm Construction

Software Design
27

Worcester Polytechnic Institute
Software Architecture
28 3D Swarm Construction
• The architecture involves software for the robots, a custom simulator, the structure, as well as a dashboard to monitor progress
• Each entity communicates with other entities over TCP
Structure
Robot 1 Robot n
Simulator
Log Aggregator Dashboard
...

Worcester Polytechnic Institute
Robot Intelligence
• The robots make decisions using a form of artificial intelligence called behavior trees
• Behaviors are defined for the robots, who then act according to the behavior tree
29
Worcester Polytechnic Institute
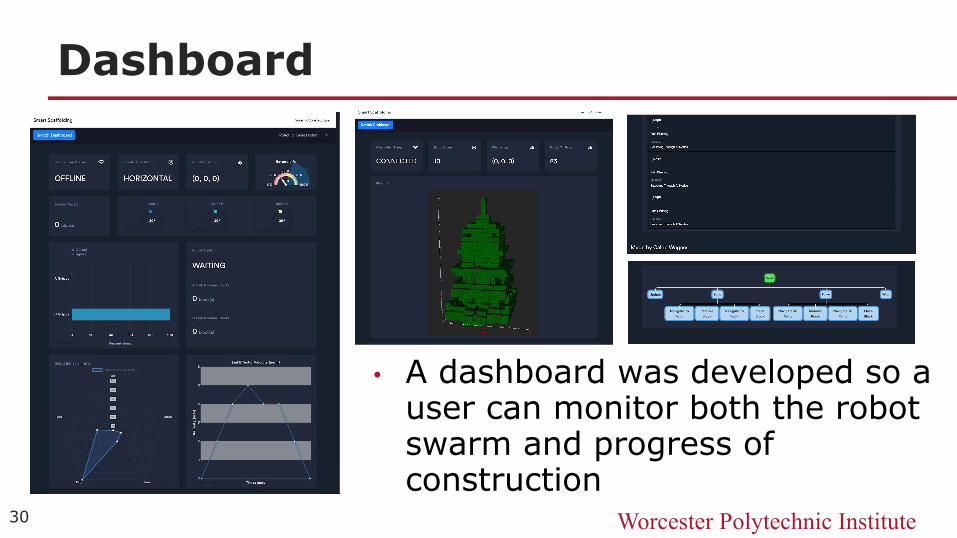
Dashboard
• A dashboard was developed so a user can monitor both the robot swarm and progress of construction
30

Worcester Polytechnic Institute
GUI
• Likewise, a GUI was developed to implement and debug and both high and low level control over the robots
31 3D Swarm Construction

Worcester Polytechnic Institute
Robot Navigation (Face*)
• To path plan for the robot, a variation of the A* algorithm was developed to allow the robot to traverse the different faces of blocks
• This algorithm, called Face*, searches through the faces of each block to find a suitable path for the robot
32 3D Swarm Construction

Worcester Polytechnic Institute
Collaborative Construction• The building algorithm works by first dividing
structures into regions, such as the four shown below
33 3D Swarm Construction

Worcester Polytechnic Institute
Collaborative Construction
• Next, the robots each claim a region as their own and distribute themselves
• They will monitor the construction of their claimed region
34 3D Swarm Construction

Worcester Polytechnic Institute
Collaborative Construction
While in a region, robots will make decisions when they receive a block:1. If the region is built, it will pass the block to other
robots (known as ferrying)2. If the region is not yet built, the robot will use the
block to begin building that region35
Worcester Polytechnic Institute
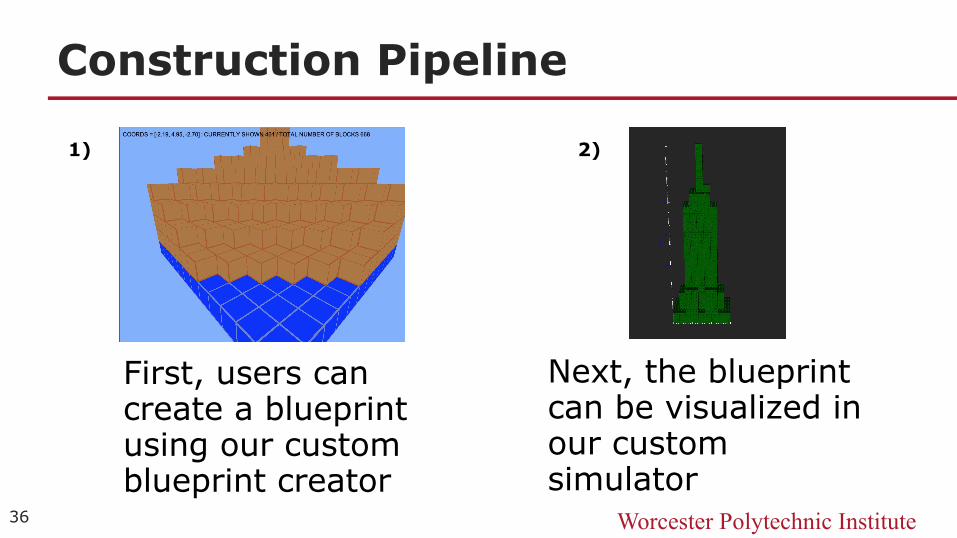
Construction Pipeline
First, users can create a blueprint using our custom blueprint creator
36
Next, the blueprint can be visualized in our custom simulator
1) 2)

Worcester Polytechnic Institute
Collaborative Construction
Finally, the building algorithm is used to build the given structure
37 3D Swarm Construction
3)

Results
38

Worcester Polytechnic Institute
Prototype Inchworm Demonstration
39 3D Swarm Construction
4: Block in midair.
5: Robot disengages block from the structure and moves it to the desired location.
1 2 3
4 51: Robot is initialized with the goal of moving the block.
2: Robot moves end effector on top of block and attaches to it. Robot releases rear foot.
3: Robot uses block as support to move rear foot forwards. Robot attaches rear foot to the structure.

Worcester Polytechnic Institute
Building Algorithm Evaluation
• The total time (timesteps) required to build different structures was measured
• As shown, adding more robots reduces the required time, such that using a swarm to build is beneficial
40 3D Swarm Construction
Worcester Polytechnic Institute
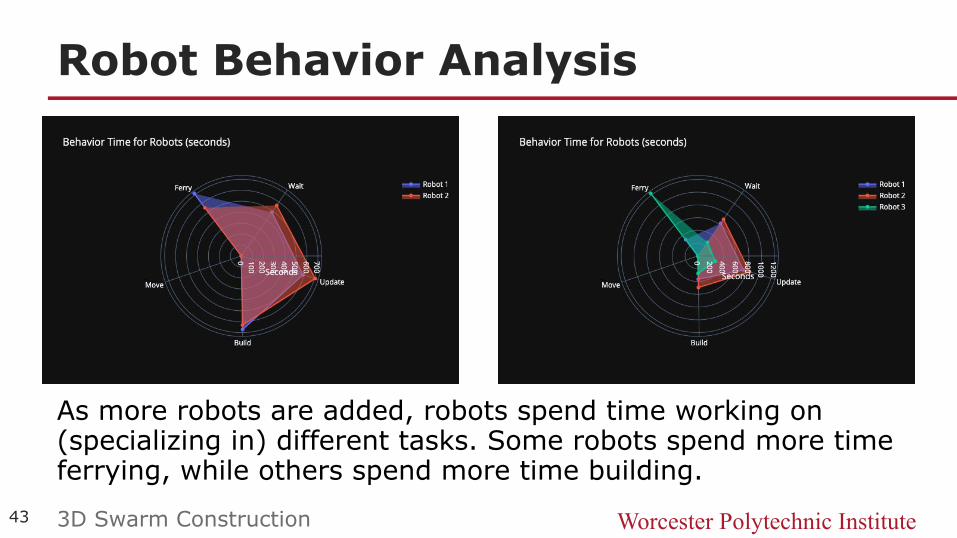
Robot Behavior Analysis
To measure the productivity of each robot in the swarm, the time each robot spent performing a particular behavior was recorded. The behaviors include:
• Waiting (robot does nothing)• Ferrying (moving blocks around)• Building (placing blocks to build)• Updating (communicating with robots)• Moving (told by other robots to move)
41 3D Swarm Construction

Worcester Polytechnic Institute
Robot Behavior Analysis
When only one robot is building, it spends most of its time either ferrying blocks (to itself) or building a division.
42 3D Swarm Construction
Worcester Polytechnic Institute
Robot Behavior Analysis
As more robots are added, robots spend time working on (specializing in) different tasks. Some robots spend more time ferrying, while others spend more time building.
43 3D Swarm Construction

Worcester Polytechnic Institute
Robot Behavior Analysis
Notice for four robots how the robots spend time working on different tasks, showing interesting characteristics of task specialization and can be used as an area for future research.
44

Worcester Polytechnic Institute
Robot Behavior Analysis
Here is a comparison of different sized swarms working to build a pyramid made of 316 blocks.
45 3D Swarm Construction

Conclusion
46

Worcester Polytechnic Institute
Conclusion
• We developed a robot (swarm) that has a high degree of mobility and functionality
─ We were able to demonstrate the capabilities of the robot especially in interacting with our blocks
• We developed a novel building algorithm that allows multiple robots to work collaboratively─ We were able to conclusively show the benefit of and
prove the correctness in using this building algorithm
47 3D Swarm Construction
Worcester Polytechnic Institute
Future Work
• Building Algorithm:─ Expand the algorithm to factor in energy expenditure of
the robots─ Modify the algorithm to build supports for structures that
are not globally connected• Robot:
─ Manufacture a larger robot swarm─ Add additional types of robots to create a more
heterogeneous swarm• Smart Blocks:
─ Develop cheaper means to manufacture smart blocks
48 3D Swarm Construction

Worcester Polytechnic Institute
Thank You
• Thank you to all our advisors for their tremendous help and support
• Thank you to Kevin Harrington for his assistance and advice
• Thank you to WPI for all its resources and most especially its community
49 3D Swarm Construction

50