a muscle-reflex model that encodes principles of legged
TRANSCRIPT

IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR 1
A Muscle-Reflex Model that Encodes Principles ofLegged Mechanics Produces Human Walking
Dynamics and Muscle ActivitiesHartmut Geyer, Hugh Herr, Member, IEEE
Abstract— While neuroscientists identify increasingly complexneural circuits that control animal and human gait, biomechanistsfind that locomotion requires little control if principles of leggedmechanics are heeded that shape and exploit the dynamics oflegged systems. Here we show that muscle reflexes could bevital to link these two observations. We develop a model ofhuman locomotion that is controlled by muscle reflexes whichencode principles of legged mechanics. Equipped with this reflexcontrol, we find this model to stabilize into a walking gait fromits dynamic interplay with the ground, reproduce human walkingdynamics and leg kinematics, tolerate ground disturbances, andadapt to slopes without parameter interventions. In addition,we find this model to predict some individual muscle activationpatterns known from walking experiments. The results suggestnot only that the interplay between mechanics and motor controlis essential to human locomotion, but also that human motoroutput could for some muscles be dominated by neural circuitsthat encode principles of legged mechanics.
Index Terms— legged locomotion, feedback control, balance.
I. INTRODUCTION
LEGGED locomotion of animals and humans is controlledby a complex network of neurons. Proposed in the early
20th century [1] and firmly established for animals today[2], the central pattern generator (CPG) forms the basis ofthis network. In the current view, the CPG consists of layersof neuron pools in the spinal cord [3] which, through otherneuron pools channeling muscle synergies, provide rhythmicactivity to the leg extensor and flexor muscles [4], [5] sufficientto generate stepping movements, even in the absence ofspinal reflexes [6]. Spinal reflexes are nevertheless part of thiscomplex network, contributing to the selection of locomotivepatterns, the timing of the extensor and flexor activities, andthe modulation of the CPG output [2], [7], [8]. Using thiscombination of a central pattern generation and modulatingreflexes, neuromuscular models of lampreys [9], salamanders
Manuscript received 20 February, 2009; revised 25 August, 2009, and 20November, 2009; accepted 2 February 2010. The authors thank A. Prochazkaand the anonymous reviewers for helpful comments and suggestions, whichled to substantial improvements of the paper. This work was supported by anEU Marie-Curie Fellowship to HG (MOIF-CT-20052-022244).
H. Geyer is with the Robotics Institute, Carnegie Mellon University, 5000Forbes Avenue, Pittsburgh, PA 15213, USA, e-mail: [email protected].
H. Herr is with the Media Laboratory, Massachusetts Institute of Technol-ogy, Cambridge, MA 02139, USA, email: [email protected].>>>>Copyright (c) 2010 IEEE. Personal use of this material is
permitted. However, permission to use this material for any otherpurposes must be obtained from the IEEE by sending a request to [email protected].<<<<<<<<<<<<<<<<<<<<<<<<<<<
[10], cats [11]–[13], and humans [14], [15] have developedinto essential tools for studying different control strategiesin animal and human locomotion. The emphasis of thesemodels has been to reproduce the architecture of the CPGand underlying reflexes suggested by experiments [7]. Littleattention has however been paid to understanding how sucharchitectures might represent or encode principles of leggedmechanics.
Several principles of legged mechanics indicate that theseemingly complex task of locomotion control can largelybe simplified. One such principle is mechanical self-stability.Using conceptual models of walking [16], [17] and running[18], [19] that capture the main features of legged mechanics,researchers have shown that legged locomotion self-stabilizeswithout control interventions if the mechanical componentsare properly tuned [20]–[23]. Walking and running robotshave demonstrated the practical relevance and control benefitsderived from mechanical self-stability [20], [24]–[26]. Anothersuch principle is the reliance on compliant leg behavior. It hasbeen shown that, if the legs behave similar to springs in stance,walking and running are only two out of many gaits of thesame mechanical system which naturally emerge at differentspeeds without the need for a gait-specific control [27]. Butit remains unclear if and how these and other principles oflegged mechanics that simplify the control of locomotion areintegrated into human motor control.
The natural candidates for such an integration are spinalreflexes, because they can link sensory information aboutlegged mechanics directly into the activation of the leg musclesvia alpha motoneurons, bypassing central inputs. For instance,in models of neuromuscular control, positive force feedbackof leg extensor muscles has been shown to not only playan important role in load-bearing [28], but also generatecompliant leg behavior in stance [29], suggesting that this keymechanical behavior can effectively be encoded in human mo-tor control by a single muscle reflex. These conceptual modelsare however too simplistic to really compare predictions aboutmotor control with the activity patterns observed for individualleg muscles.
To clarify the influence of legged mechanics on humanmotor control, we here develop a more detailed neuromuscularhuman model that expands on the idea of encoding principlesof legged mechanics in autonomous muscle reflexes. Themodel represents the human body with a trunk and two three-segment legs. Each leg is actuated by seven Hill-type muscles
0000–0000/00$00.00 c© 2010 IEEE

2 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR
that permit a direct comparison with prominent muscles ofthe human leg. In section 2, we detail how this model and itscontrol evolve from the reliance on compliant leg behavioras a core principle of legged locomotion [18], [19], [27].Throughout this process, we encode in muscle reflexes moreprinciples of legged mechanics, for instance, to avoid jointoverextension of segmented legs [30], [31], or to improve gaitstability [23], [32]–[34]. Comparing the model’s behavior withkinetic, kinematic, and electromyographic evidence from theliterature, we show in section 3 that a neuromuscular modelequipped with this principle-based motor control not onlycan produce biological walking mechanics, but also predictsthe observed activation patterns of some individual muscles.We further show that this reflex control allows the model totolerate ground disturbances and to adapt to slopes withoutparameter interventions. Finally, we discuss in section 4 theimplications of our results.
II. HUMAN MODEL
The conceptual basis for the human model is the bipedalspring-mass model (Fig. 1A), which simplifies human loco-motion to a point mass that travels on two massless springlegs. Despite its simplicity, the bipedal spring-mass modelreproduces the center-of-mass dynamics observed in humanwalking and running, unifying both gaits in one mechanicalframework based on compliant leg behavior in stance [27].To translate this conceptual model into a neuromuscular one,which better reflects human morphology, three main steps arerequired. First, the springs must be replaced with segmentedlegs, and compliant stance behavior must be generated byextensor muscles spanning the ankle and knee. Second, thepoint mass must be replaced with a trunk, and hip musclesmust be added for its balance control. And third, swing legcontrol must be added to enable this model to enter cycliclocomotion.
In this section, we detail how the structure and control ofthe human model is guided by these three main steps. Amajor part of this model evolution is driven by principlesof legged mechanics that we encode in muscle reflexes.Throughout this section, we try to motivate these reflexes withneurophysiological evidence from the literature.
A. Replacing the leg springs with segmented legs
In an earlier study, it was shown that positive force feedback(F+) of the extensor muscles, a spinal reflex during stanceobserved in cats [35] and suggested in humans [28], [36], caneffectively generate compliant behavior in neuromuscular legs[29]. We thus replace each spring of the bipedal spring-massmodel with a segmented leg that has thigh, shank and foot(Tab. IV), and add a soleus muscle (SOL) and a vasti musclegroup (VAS) (Tab. II), both generating their own muscleactivity in stance using F+ (Fig. 1B). We model this forcereflex in the same way as in [29]. With F+, the stimulationSm(t) of a muscle m is the sum of a pre-stimulation S0,m,and the muscle’s time-delayed (∆t) and gained (G) force Fm:Sm(t) = S0,m + GmFm(t − ∆tm). Details on how reflexparameters were chosen are provided in the result section and
Fig. 1. Model evolution. Stance leg: (A) Compliant leg behavior as keyto walk and run is generated (B) by driving the soleus muscle (SOL) andthe lumped vasti group muscles (VAS) with positive force feedbacks F+. (C)To prevent knee overextension the biarticular gastrocnemius muscle (GAS) isadded using F+, and the VAS gets inhibited if the knee extends beyond a 170◦threshold. To prevent ankle overextension, the tibialis anterior muscle (TA) isadded whose pulling of the ankle joint into a flexed position by positive lengthfeedback L+ is suppressed under normal stance conditions by negative forcefeedback F- from soleus. Trunk: (D) The trunk is driven into a referencelean with respect to the vertical by the hip flexor (HFL) and co-activatedhip extensor muscles (GLU, HAM) of the stance leg, where the biarticularHAM prevents knee overextension resulting from hip extensor moments. Thetrunk reflexes are modulated by the load the stance leg bears. Swing leg:(E) The landing of the other (leading) leg initiates swing by adding/subtractinga constant stimulation to HFL/GLU, respectively, and by suppressing VASproportionally to the load borne by the other leg. (F) The actual leg swing isfacilitated by HFL using L+ until it gets suppressed by L- of HAM. HFL’sstimulation is biased dependent on the trunk’s lean at take-off. Moreover,using F+ for GLU and HAM retracts and straightens the leg toward the endof swing. Finally, the now unsuppressed L+ of TA drives the ankle to a flexedposition.
appendix I. Appendix II describes how muscle stimulationtranslates into muscle force, and appendix III explains themodel’s musculoskeletal connections, joint architecture, andmass distribution.
Although the segmentation into thigh, shank and foot isessential to represent the structure of the human leg, it alsointroduces a control problem during leg compression if thejoints are compliant [30], [31], as guaranteed by F+ of SOLand VAS. In segmented legs, the knee and ankle torques, τkand τa, obey the static equilibrium τk/τa = hk/ha, wherehk and ha are the perpendicular distances from the kneeand the ankle to the vector of the leg ground reaction force(GRF), Fleg , respectively. In effect, a large extension torqueat one joint forces the other joint closer to Fleg , threateningits overextension (for details see [30]).
We counter this tendency to overextend at the knee or theankle by adding the gastrocnemius (GAS) and tibialis anterior(TA) muscles (Fig. 1C). Like SOL and VAS, the biarticularGAS uses F+ during the stance period of gait. This musclereflex not only prevents knee hyperextension resulting fromlarge extension torques at the ankle, but also contributes togenerating an overall compliant leg behavior. In contrast, themonoarticular TA uses local positive length feedback (L+)
GEYER AND HERR: MUSCLE-REFLEX MODEL OF HUMAN WALKING 3
with STA(t) = S0,TA +GTA(`CE,TA − `off,TA)(t−∆t,TA)where `CE,TA is the TA fiber length and `off,TA is a lengthoffset. Flexing the foot, TA’s stretch reflex L+ prevents theankle from overextending when large knee torques develop.However, this reflex is not required if sufficiently active ankleextensors preserve the torque equilibrium between the kneeand ankle. To avoid that the TA unnecessarily fights theSOL in this situation, we inhibit the TA stimulation witha negative force feedback (F-) from the SOL, resulting inSTA(t) = S0,TA + GTA(`CE,TA − `off,TA)(t − ∆t,TA) −GSOLTAFSOL(t−∆tSOL).
The implemented TA control is supported by evidence fromreflex experiments. These experiments show that a large TAstretch response is present in swing, but suppressed mainlywhen TA is silent in stance [37], and it has been suggested thatdisynaptic Ia reciprocal pathways from ankle plantar flexorsto dorsiflexors are responsible for this inhibition [38].
Without direct support from neurophysiological experi-ments, we further protect the knee from hyperextension byinhibiting VAS if the knee extends beyond a 170◦ threshold,SV AS(t) = S0,V AS +GV ASFV AS(t−∆tV AS)−kϕ∆ϕk(t−∆tk), where kϕ is a proportional gain, ∆ϕk = ϕk − 170◦,and ϕk is the knee angle. This reflex inhibition is only activeif ∆ϕ > 0 and the knee is actually extending. In humans,it would require the sensory information from pressure cellsaround the knee joint capsule to translate into knee positionand velocity.
B. Replacing the point mass with a trunk
For the next model evolution, we replace the point mass ofthe bipedal spring-mass model with a trunk segment (Tab. IV,Fig. 1D) that must be balanced during locomotion. Balancingthe trunk is generally regarded as a multisensor integrationtask that mixes sensory information from the vestibular or-gans, visual cues, and proprioception from the leg muscles[39]. While this complex integration seems critical to controlstanding, it may not be required during locomotion [40]. Inline with this observation, [41] could stabilize the trunk of ahuman model in walking only by activating the hip musclesproportional to the velocity of the trunk and to its forwardlean in the inertial system.
We balance the trunk in a similar way. We add to eachleg a gluteus muscle group (GLU) and a hip flexor musclegroup (HFL). The GLU and the HFL are stimulated with aproportional-derivative signal of the trunk’s forward lean angleθ with respect to gravity, SGLU/HFL ∼ ±[kp(θ−θref )+kdθ],where kp and kd are the proportional and derivative gains,and θref is a reference lean angle. This proportional-derivativetrunk control can be interpreted as a reflex control that usessensory information from the vestibular organs; however, it isnot based on a particular principle of legged mechanics. Inaddition, we include the biarticular hamstring muscle group(HAM) with SHAM ∼ SGLU to counter knee hyperextensionthat results from a large hip torque developed by the GLUwhen pulling back the heavy trunk. Since hip torques canonly balance the trunk if the legs bear sufficient weight onthe ground, we modulate the stimulations of the GLU, HAM,
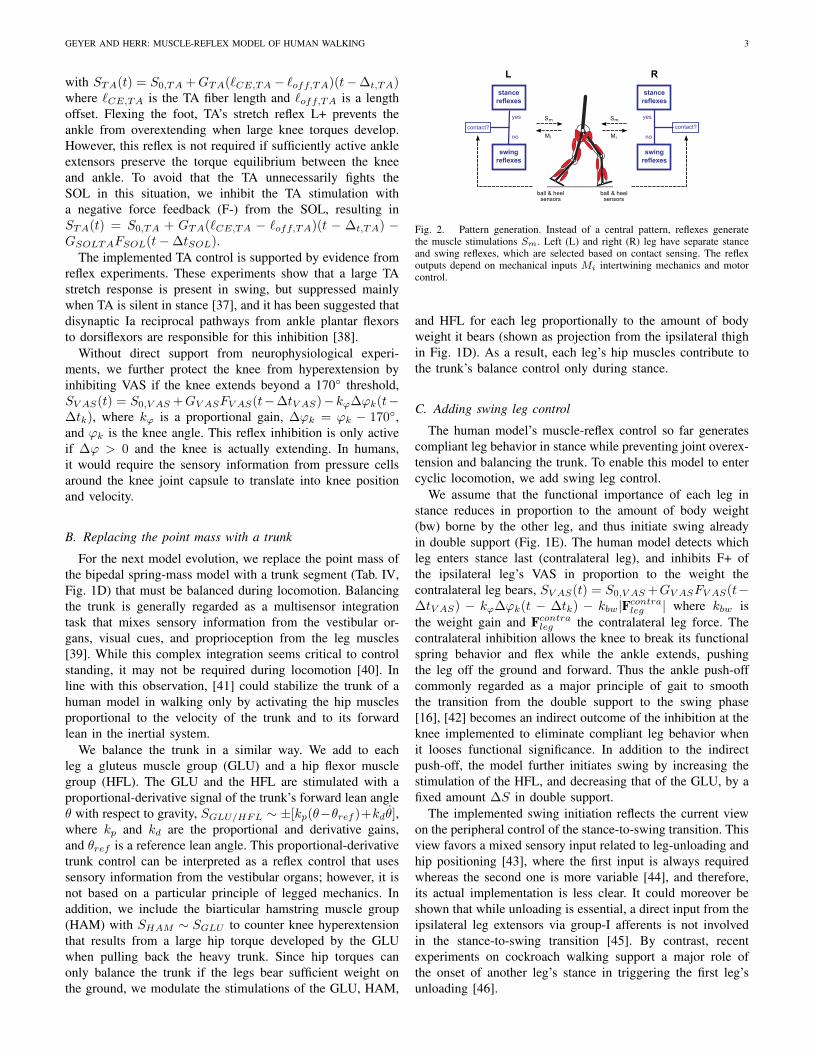
Fig. 2. Pattern generation. Instead of a central pattern, reflexes generatethe muscle stimulations Sm. Left (L) and right (R) leg have separate stanceand swing reflexes, which are selected based on contact sensing. The reflexoutputs depend on mechanical inputs Mi intertwining mechanics and motorcontrol.
and HFL for each leg proportionally to the amount of bodyweight it bears (shown as projection from the ipsilateral thighin Fig. 1D). As a result, each leg’s hip muscles contribute tothe trunk’s balance control only during stance.
C. Adding swing leg control
The human model’s muscle-reflex control so far generatescompliant leg behavior in stance while preventing joint overex-tension and balancing the trunk. To enable this model to entercyclic locomotion, we add swing leg control.
We assume that the functional importance of each leg instance reduces in proportion to the amount of body weight(bw) borne by the other leg, and thus initiate swing alreadyin double support (Fig. 1E). The human model detects whichleg enters stance last (contralateral leg), and inhibits F+ ofthe ipsilateral leg’s VAS in proportion to the weight thecontralateral leg bears, SV AS(t) = S0,V AS +GV ASFV AS(t−∆tV AS) − kϕ∆ϕk(t − ∆tk) − kbw|Fcontra
leg | where kbw isthe weight gain and Fcontra
leg the contralateral leg force. Thecontralateral inhibition allows the knee to break its functionalspring behavior and flex while the ankle extends, pushingthe leg off the ground and forward. Thus the ankle push-offcommonly regarded as a major principle of gait to smooththe transition from the double support to the swing phase[16], [42] becomes an indirect outcome of the inhibition at theknee implemented to eliminate compliant leg behavior whenit looses functional significance. In addition to the indirectpush-off, the model further initiates swing by increasing thestimulation of the HFL, and decreasing that of the GLU, by afixed amount ∆S in double support.
The implemented swing initiation reflects the current viewon the peripheral control of the stance-to-swing transition. Thisview favors a mixed sensory input related to leg-unloading andhip positioning [43], where the first input is always requiredwhereas the second one is more variable [44], and therefore,its actual implementation is less clear. It could moreover beshown that while unloading is essential, a direct input from theipsilateral leg extensors via group-I afferents is not involvedin the stance-to-swing transition [45]. By contrast, recentexperiments on cockroach walking support a major role ofthe onset of another leg’s stance in triggering the first leg’sunloading [46].

4 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR
During actual swing, we mainly rely on a leg’s ballisticmotion [16]. The distal leg muscles SOL, GAS, and VAS aresilent in that phase. Only TA’s L+, introduced in section II-A,remains active to provide foot clearance with the ground.
We modulate the ballistic motion in two necessary ways(Fig. 1F). First, as the natural frequency of the purely ballisticleg swing is too low to ensure a timely foot placement[16], the model’s proximal HFL gets stimulated by its ownstretch reflex L+, facilitating leg protraction during swing.Such a homonymous reflex-shaping of hip flexor activitieshas been suggested from experiments with decerebrate cats[47]; however, since the required protraction speed dependson the trunk’s forward lean, in the human model HFL’s L+ isbiased by the trunk’s pitch θref at take off (TO), resulting inSHFL(t) = S0,HFL +klean(θ−θref )TO +GHFL(`CE,HFL−`off,HFL)(t−∆t,HFL).
Second, we improve gait stability by enforcing swing-legretraction. If legs reach and maintain a proper orientationduring swing, legged systems self-stabilize mechanically intoa gait cycle [20]–[22], [27]. The tolerance of this mechan-ical self-stability against disturbances largely improves if aleg retracts before landing [23]. The human model real-izes this halt-and-retract strategy with three muscle reflexes.One reflex inhibits the HFL’s L+ proportional to the stretchwhich the HAM receives in swing, SHFL(t) = klean(θ −θref )TO + GHFL(`CE,HFL − `off,HFL)(t − ∆t,HFL) −GHAMHFL(`CE,HAM − `off,HAM )(t−∆t,HAM ). This neg-ative length feedback L- compensates for the hip rotationthat results from the transfer of angular momentum when thepassive knee rotates into full extension during leg protrac-tion. The other two reflexes, F+ of the GLU, SGLU (t) =S0,GLU + GGLUFGLU (t − ∆tGLU ), and F+ of the HAM,SHAM (t) = S0,HAM + GHAMFHAM (t − ∆tHAM ), ensurethat, dependent on the actual protraction momentum, the swingleg not only halts, but also transfers part of this momentuminto leg lowering and retraction.
Some neurophysiological evidence exists to support theimplemented reflex control for leg retraction, though mainlyfor the hamstring. The excitation of the hamstring has beenobserved as a recovery strategy in late swing lowering the legand shortening the step [48]. Moreover, this muscle group’stendon jerk reflex is enhanced in that phase, signaling aclear reflex contribution to its activation [49]. A similar reflexactivity for the glutei has not been documented. Nor is a Iareciprocal inhibition known that projects from the hamstringto the hip flexors in swing.
Although the human model has no central pattern generator(CPG) that feed-forwardly activates its muscles, it switches foreach leg between the different reflexes for stance and swingusing sensors at the ball and heel of each foot that detectground (Fig. 2). These sensors mimic mechanoreceptors inthe foot, which are suggested to be important for the controlof phase transitions in humans [43].
III. RESULTS
Because of the switches between stance and swing reflexesbased on ground detection, the model’s dynamic interaction
Fig. 3. Walking self-organized from dynamic interplay with ground. (A)Snapshots of human model taken every 250ms. Leg muscles shown only forthe right leg with dark color for activations > 10%. ϕa,k,h: ankle, kneeand hip angle (initial conditions: ϕa,k,h = 85◦, 175◦, 175◦ for left leg and90◦, 175◦, 140◦ for right leg). (B) Corresponding model GRFs normalizedto body weight (bw). Right and left leg GRFs shown in black and gray (30Hzlow-pass filtered), with thick and thin traces marking the vertical and fore-aftcomponents.
with its mechanical environment becomes a vital part ofgenerating muscle activities. To clarify the influence of leggedmechanics on human motor control, we first try to make thismodel walk like a human and then compare its predicted motoroutput with muscle activations from the literature.
For the first part, we require the model (i) to producecyclic motions with GRFs similar to those of human walking,(ii) to observe gait determinants relevant to sagittal-planemotion, including early stance knee flexion, controlled plantarflexion, powered plantar flexion and anterior-posterior flexionof the trunk [42], and (iii) to demonstrate some robustnessagainst ground disturbances. We implement the model inMatlab SimMechanics (v2.7) and repeatedly start it from atypical walking speed of 1.3ms−1, manually tuning the reflexparameters to match our mechanical requirements. As initialvalues for the reflex parameters, we use informed estimates.Note that all results are presented for the final values, whichwe obtain by maximizing (iii) constrained by (i) and (ii) (seeappendix I for details on initial estimates and final values).
A. Walking gait
Figures 3 and 4 show the result of this manual reflex tuning.In figure 3, the model starts with its left leg in stance andits right leg in swing. Since the modeled muscle reflexesinclude signal transport delays of up to 20ms, all muscles aresilent at first. Because of these disturbed initial conditions,the model slightly collapses and slows down in its first step(Fig. 3A). It recovers however in the next few steps, andwalking self-organizes from the dynamic interplay betweenmodel and ground. Here the vertical GRF of the legs in stanceshows the M-shape pattern characteristic for walking gaits(Fig. 3B), indicating similar center-of-mass dynamics of modeland humans for steady-state walking. Here we consider themodel to be in steady state only if its joint kinematics vary< 1e-4 degrees from stride to stride.

GEYER AND HERR: MUSCLE-REFLEX MODEL OF HUMAN WALKING 5
B. Steady-state patterns of joint angles and torques
The reflex model produces angle and torque trajectories thatare similar to those of human walking (Fig. 4). To quantify theagreement, we use the maximum cross-correlation coefficientsR of model and human trajectories (human data digitizedfrom [50] and then interpolated to 150 data points evenlydistributed from 0% to 100% stride), and the correspondingtime shifts ∆ in percent of stride if significantly different fromzero (95% confidence interval) [51]. R=1 shows a perfectagreement, whereas R=0 indicates no agreement. Becausethe model distinguishes between stance and swing control,we split the comparison into these two phases. The jointkinematics show a strong agreement for all joints in stance(ϕh: R=0.98, ϕk: R=0.97, ϕa: R=0.96), and for the hipand knee in swing (R=0.99). The ankle kinematics fit lesswell in that phase (R=0.63). The difference is due mainly tomaximizing the model robustness against ground disturbances(compare Sec. III-D), which requires a rapid foot clearancenot found in level walking. The joint torques nearly matchfor the ankle (τa: R=0.99), but show less agreement for theknee (τk: R=0.65) and lesser still for the hip (τh: R=0.45,∆=10%). The major difference in the knee and hip torquesoccurs in early stance where, in the model, knee extensiontorque is diminished, and hip extension torque exaggeratedand its onset delayed by about 5%. (Swing torques are notcompared; [50] only reports stance torques.)
C. Predicted motor output
Figure 4 furthermore shows that the reflex model can notonly produce human walking dynamics and kinematics, butalso predicts known activation patterns. In stance, the corre-lations between predicted and measured activation patterns liewithin the range observed in experiments [52] for all muscles.The patterns of SOL (R=0.97, ∆=9%) and GAS (R=0.99,∆=9%) show the strongest agreement. The shift by 9% ofstride in the predicted patterns is caused by the continuedactivity of the model’s plantar flexors until the end of stance,and is related to the toe segment and associated musclesabsent from the model. In humans, ankle plantar flexion in latestance is supported by toe flexors (and other small musclescrossing the subtalar joint) [50], which lessens the load ontriceps surae. The patterns of GLU (R=0.93, ∆=6%) and HAM(R=0.90, ∆=7%) share similar features and have similar R-values and delays of onset in the model. The predicted VASpattern (R=0.87, ∆=8%) captures the early stance activity inhumans, but starts from a lower initial activity and shows asecond peak not seen in experiments. The predicted TA pattern(R=0.87, ∆=3%) shares the lower initial activity, yet matchesthe remainder of TA’s pattern in experiments. Finally, themuscle activity of HFL shows the weakest agreement (R=0.84)in stance.
In swing, the correlation reveals some experimental ac-tivation features unidentified by the model. The strongestagreement is observed for the HAM (R=0.95), although itsoverall activity is clearly too low in the model. The differenceindicates that the HAM force is overestimated during swingin the model, which is supported by [53] who report that only
Fig. 4. Steady-state walking at 1.3ms−1. Normalized to one stride fromheel-strike to heel-strike of the same leg, the model’s steady-state patterns ofmuscle activations, torques, and angles of (A) hip, (B) knee and (C) ankle arecompared to human walking data (adapted from [50]). Vertical dotted linesaround 60% of stride indicate toe off. Abbreviations are given in figure 1.Compared muscles: (i) adductor longus, (ii) upper gluteus maximum, (iii)semimembranosis, and (iv) vastus lateralis.
the semitendinosus muscle of the hamstrings influences swingleg motion. The patterns of HFL (R=0.87) and TA (R=0.87)show similar levels of agreement. One clear difference in theTA patterns occurs in late swing, where activity stays aboutconstant in the model but rises in humans, preparing for stance[50]. The same feature is also lacking for GLU (R=0.51) andVAS (R=0.51) in the model, showing a clear mismatch inmotor output.
The lack of stance preparation in the model explains theobservable differences between model and human walkingin stance. It causes the low initial stance activities of VASand TA, which in turn results in an increased knee flexion(ϕk) and insufficient controlled plantar flexion (ϕa, τa). As aconsequence, the model’s trunk experiences a large forwardtilt from the insufficiently damped impact when the forefoot

6 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR
hits the ground, requiring the hip muscles GLU and HAMto generate exaggerated extension moments (τh) to maintaintrunk balance (ϕh).
D. Adaptation to slopes
Despite its limited reflex control, the model shows robust-ness against small ground disturbances (< ±4cm) and canadapt to slopes (< ±4%) without parameter interventions.Figure 5 provides an example in which the model encountersup (strides 2 to 6) and down slopes (strides 9 to 12) (seesupplementary animation 1 for a trial in which the modelencounters irregular terrain and longer slopes). No singlecontrol is responsible for this adaptation, but the dynamicinterplay between legged mechanics and motor control. Forinstance, the compliance and rebound of the stance leg dependson how much load the leg extensors SOL, GAS and VASexperience, which guarantees that the leg yields sufficientlyto allow forward progression when going up, but brakessubstantially when going down (panels B and C). For anotherexample, the motion of the swing leg is accelerated by themechanical impact of the opposite leg, the forward lean ofthe trunk, and an increased ankle push-off. These combinedfeatures ensure that the swing leg protracts enough when goingup and substantially so when going down (panel A), wherethe dynamic pull that GLU and HAM experience ensures thatexcess rotation of the leg is converted into rapid retraction andstraightening (panel B).
Note however that for the maximum slopes of ±4% themodel is sensitive to how the swing foot hits the ground. Ifthe toe hits a step frontally when going up, or it touches theground in mid-swing when going down, the model trips andcan eventually fall. In general, we observe the model behaviorto be very robust for the stance leg, but more sensitive toexternal disturbances and internal reflex adjustments for theswing leg (compare table I in appendix I for the sensitivity ofthe reflex parameters). For instance, if the model starts from aninitial running speed of about 3ms−1, it manages some stepsthat resemble human running, but eventually falls because theswing leg fails (see supplementary animation 2).
IV. DISCUSSION
Our results suggest that mechanics and motor control cannotbe viewed separately in human locomotion. We started fromthe assumption that principles of legged mechanics play animportant role in locomotion and developed the conceptualspring-mass model, which explains the basic dynamics ofhuman locomotion, into a neuromuscular one that resembleshuman morphology. For this development, we needed toencode several principles of legged mechanics with actuatorsand control, which turned into muscles and reflexes. Besidesthe generation of compliant stance-leg behavior [18], [19],[27], these principles included the stabilization of segmentedchains against joint overextension when compressing in stance[30], [31], the indirect generation of ankle push-off [16], [42]by eliminating compliant leg behavior in proportion to itsloss of functional significance in double support, the reliancemainly on ballistic motions for the lower leg in swing [16],
and the improvement of gait stability by swing-leg retraction[23], [32]–[34]. While more principles of legged mechanics docertainly exist, the ones we implemented were sufficient forthe human model to enter cyclic motions. Taken separately,these principles cannot account for human leg dynamics andkinematics at the level of detail we investigated; and therewas no guarantee that taken together they would. However,we found after tuning the resulting muscle reflexes that, bycombining these principles, human walking dynamics and legkinematics emerge (Figs. 3 and 4), and the model toleratesground disturbances and adapts to slopes without parameterinterventions (Fig. 5). Moreover, we found that the modelpredicts some individual muscle activation patterns observedin walking experiments (Fig. 4). These results suggest that theinterplay between mechanics and motor control is not onlyimportant, but could for some muscles dominate human motoroutput in locomotion.
Our findings support the view that centrally generated pat-terns of muscle activity may have limited functional relevanceto normal locomotion. While it is generally accepted thatCPGs can form a central drive for motor activity [4], [6], [54],their functional role in human locomotion is debated [43], [55].On one side, it has been shown that locomotor-like activity ofleg muscles can be evoked by tonic stimulation of the humanspinal cord, favoring the existence and functional relevance ofCPGs in man [5]. On the other side, the debate is fueled by thelack of direct experimental evidence of human CPGs, and by acontinuing awareness that mechanics and motor control shouldbe intertwined [7]. For instance, back in 1969, Lundberg [56]already suggested that, out of rather simple central patterns,spinal reflexes could shape the complex muscle activities seenin real locomotion. Refining this idea, Taga [57] later proposedthat, because ‘centrally generated rhythms are entrained bysensory signals which are induced by rhythmic movementsof the motor apparatus ... [,] motor output is an emergentproperty of the dynamic interaction between the neural system,the musculo-skeletal system, and the environment’. In supportof his claim, Taga [57] presented a neuromuscular modelof human locomotion that combined a CPG with sensoryfeedback. He demonstrated how basic gait can emerge fromthe global entrainment between the rhythmic activities of theneural and musculo-skeletal systems.
What the actual ratio of central and reflex inputs is thatgenerates the motor output remains unclear, however [12],[58], [59]. For instance, for walking cats, it has been estimatedthat only about 30 percent of the muscle activity observed inthe weight bearing leg extensors can be attributed to musclereflexes [60], [61]. In humans, the contribution of reflexesto the muscle activities in locomotion seems to be moreprominent. Sinkjaer and colleagues estimated from unloadingexperiments that reflexes contribute about 50 percent to thesoleus muscle activity during stance in walking [62]. Morerecently, Grey and colleagues found that the soleus activitychanges proportionally to changes in the Achilles tendon force,suggesting a direct relationship between positive force feed-back and activity for this muscle [36]. Whether such a largereflex contribution is present for all leg muscles is unclear.Perhaps the motor control of humans shows the same proximo-

GEYER AND HERR: MUSCLE-REFLEX MODEL OF HUMAN WALKING 7
Fig. 5. Slope adaptation. Approaching from steady-state walking at 1.3ms−1, 14 strides of the human model are shown adapting to slope ascent and descentwith 4cm vertical steps. One stride is defined from heel-strike to heel-strike of the right leg. Shown are (A) snapshots of the model at heel-strike and toe-offof the right leg, (B) right leg muscle activation patterns, and (C) GRFs (right and left leg in black and gray) normalized to body weight (bw).
distal gradient as the one Daley and colleagues proposed forbirds. They concluded from bird running experiments thatproximal leg muscles are mainly controlled by central inputswhile distal leg muscles are governed by reflex inputs due tohigher proprioceptive feedback gains and a larger sensitivityto mechanical effects [63]. Having no CPGs, our modelshows that no central input is required to generate walkingmotions and muscle activities, suggesting that reflex inputswhich continuously mediate between the nervous system andits mechanical environment may even take precedence overcentral inputs in the control of normal human locomotion.
Experiments will be needed to probe this conclusion. Here,the principled approach detailed in this paper offers an advan-tage over the more common approach attempting to reverse-engineer human motor output. In many cases, neuromuscularmodels of animal and human locomotion mimic as manyneural structures as suggested by physiological evidence,including CPGs, pattern formation and reflex networks [3],[11]–[15], [57]. Although these models can be optimized togenerate locomotion steps, their predictive power is limited.The functional relevance of their individual control elementscannot be separated clearly. Nor can they reveal essentialcontrol structures that lie still undiscovered. The principledapproach, by contrast, discards at first all the suggested controlstructures. Synthesizing motor control element by element, itallows to relate individual motor output to underlying mechan-ical function, and to make testable predictions about controlelements that have not yet been described in experiments.Several muscle reflexes of the human model are currently not
backed by physiological evidence (compare section II). Theyprovide testable predictions about a motor control that encodesprinciples of legged mechanics.
While it is too early to draw definite conclusions aboutthe neural consequences of our modeling results, the technicalmerit of the identified muscle-reflex control we demonstratein a companion paper on the control of a powered ankleprosthesis.
APPENDIX IREFLEX CONTROL PARAMETERS
Initial values for the reflex parameters were obtained fromour previous study on reflex behavior, and from approximatingthe trunk as an inverted pendulum and the swing leg as adouble pendulum driven at the hip. In detail, the F+ of SOL,GAS, and VAS (Sec. II-A, Fig. 1B,C) had initial reflex gainsof 1/Fmax and pre-stimulations of 1% reported to generaterebound behavior [29], and L+ of TA was adjusted to dorsiflexthe ankle to 5 deg in 100ms. For the trunk balance (Sec. II-B, Fig. 1D), the gains kp and kd, and the pre-stimulation S0,were initially set to balance and critically damp the invertedtrunk pendulum with a natural frequency of 2Hz and a forwardlean of 5 deg (typical values in human walking), assumingactuators with a maximum force of 3000N and a lever of10cm. The gain kbw was then adjusted so that one body weightfully suppressed muscle activation. For the swing leg control(Sec. II-C, Fig. 1E,F), ∆S of HFL and GLU had a start valuesufficient to generate a step from stand still of the model. TheL+ reflex gain of HFL was adjusted so that a double pendulum

8 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR
TABLE IREFLEX PARAMETERS AND THEIR TOLERANCE. THE GAINS Gm AND kbw
ARE NORMALIZED TO Fmax,m AND THE BODY WEIGHT. THE OFFSETS
`off,m ARE SHOWN IN FRACTIONS OF `opt,m . PRE-STIMULATIONS S0,m
ARE 0.01 (NOT SHOWN) EXCEPT FOR THE STANCE VALUES S0,V AS AND
S0,BAL OF THE VAS AND OF THE TRUNK BALANCE MUSCLES HAM,GLU AND HFL.
value min ... max value min ... maxGSOL 1.2 0.97 ... 2.17 θref 0.105 0.017 ... 0.11GTA 1.1 0.55 ... 3.2 kd 0.25 0.10 ... 0.75`off,TA 0.71 0.59 ... 0.80 kbw 1.2 1.3 ... 5.0GSOLTA 0.3 0 ... ∞ ∆S 0.25 0.14 ... 1GGAS 1.1 0 ... ∞ GHAM 0.65 0 ... 0.67S0,V AS 0.09 0.047 ... 0.71 GGLU 0.4 0 ... 0.52GV AS 1.15 0.82 ... 13.5 GHFL 0.35 0.17 ... 3kϕ 2 0 ... ∞ `off,HFL 0.6 0 ... 0.67ϕk,off 2.97 2.71 ... ∞ GHAMHFL 4 0 ... 100S0,BAL 0.05 0.01 ... 0.32 `off,HAM 0.85 0.83 ... ∞kp 1.91 1.78 ... 22 klean 1.15 1 ... 5.7
of a lifted thigh and a passive shank-foot reaches a step lengthof 0.7m within 300ms (typical values for normal walking).Since the ankle push-off from a stand still does not suffice,the driven pendulum physics require that the thigh decelerateseventually allowing the inertia of the shank-foot to passivelyrotate it around the thigh and bring the leg into extension,which guided setting the reflex gain and offset of the L- fromHAM to HFL. The reflex gains of the F+ of GLU and HAMwere initially set to 0.5/Fmax, which resulted in a gentle leglowering and retraction of the double pendulum toward theend of the step with 0.7m length. Finally, the manual reflextuning that followed also delivered the necessary values forthe remaining reflexes including the suppressions of TA viaF- from SOL and of VAS via knee angle feedback (Sec. II-A), and the trunk bias of HFL’s L+ in swing (Sec. II-C). Thefinal value for each reflex parameter is shown in table I alongwith its sensitivity (a change during steady-state locomotionbeyond the min/max limits leads to a fall).
The equations below implement the reflex control comput-ing the muscle stimulations Sm(t). All stimulations are limitedfrom 0.01 to 1 before they produce muscle activations Am(t).The time delays of 20ms, 10ms and 5ms in the equationsrepresent long, medium and short neural signal delays. Theywere not tuned but estimated from the time gaps betweenM-wave and H-wave of H-reflex experiments (for details see[29]).
Stance Reflexes (tl = t − 20ms, tm = t − 10ms, andts = t − 5ms, DSup is 1 if leg is trailing leg in doublesupport, otherwise 0, {}+/− refers to only positive/negativevalues): SSOL = S0,SOL + GSOL FSOL(tl); STA =
S0,TA+GTA [`ce,TA(tl)− `off,TA)]−GSOLTAFSOL(tl); SGAS =
S0,GAS +GGASFGAS(tl); SV AS = S0,V AS +GV AS FV AS(tm)−kϕ [ϕk(tm)− ϕk,off ] [ϕk(tm) > ϕk,off ] [ϕk(tm) > 0] −kbw |Fcontra
leg (ts)| DSup; SHAM = S0,HAM +
{kp [θ(ts)− θref ] + kdθ(ts)}+ kbw |Fipsileg (ts)|; SGLU = S0,GLU +
{0.68kp [θ(ts)− θref ] + kdθ(ts)}+ kbw |Fipsileg (ts)| − ∆S DSup;
SHFL = S0,HFL +{kp [θ(ts)− θref ]+kdθ(ts)}−kbw |Fipsileg (ts)|+
∆S DSup
Swing reflexes ({}PTO: constant value taken
Fig. 6. Muscle-tendon model. An active, contractile element (CE) togetherwith a series elasticity (SE) form the muscle-tendon unit (MTU) in normaloperation. If the CE stretches beyond its optimum length (`CE > `opt), aparallel elasticity (PE) engages. Conversely, a buffer elasticity (BE) preventsthe active CE from collapsing if the SE is slack (`MTU − `CE < `slack).
at previous take off): SSOL = S0,SOL; STA =
S0,TA + GTA [`ce,TA(tl)− `off,TA)]; SGAS =
S0,GAS ; SV AS = S0,V AS ; SHAM = S0,HAM +
GHAM FHAM (ts); SGLU = S0,GLU + GGLU FGLU (ts);SHFL = S0,HFL + GHFL [`CE,HFL(ts)− `off,HFL] −GHAMHFL [`CE,HAM (ts)− `off,HAM ] +
{klean [θ(ts)− θref ]}PTO
APPENDIX IIMUSCLE TENDON UNITS
All 14 muscle-tendon units (MTUs) have a common modelstructure (Fig. 6). An MTU’s force Fm = Fse = Fce +Fpe − Fbe is computed from resolving the inner degree offreedom `ce. With Fce = AFmaxf`(`ce)fv(vce), `ce is equalto
∫vcedt =
∫[fv(vce)]−1dt with fv(vce) = Fse−Fpe+Fbe
AFmaxf`(`ce) ,where A is the muscle activation, Fmax, the maximum isomet-ric force, f`(`ce) and fv(vce) are the force-length and force-velocity relationships of the contractile element (CE), and Fse,Fpe and Fbe are the forces of the series (SE), parallel (PE),and buffer elasticity (BE). Details on how we model A, f`, fv
and Fse are given in [29]; for completeness, we here reportthe parameters required to compute these functions includingthe excitation-contraction coupling constant tecc = 0.01 of A;the width w = 0.56`opt and the residual force factor c = 0.05of f`; the eccentric force enhancement N = 1.5 and the shapefactor K = 5 of fv; and the reference strain εref = 0.04 ofFse. Fbe = Fmax( `min−`ce
`optεbe)2, where `min = `opt − w is the
BE rest length and εbe = w/2 is a reference compression.Fpe = Fmax( `ce−`opt
`optεpe)2 fv(vce) with the PE reference strain
εpe = w. Fpe ∼ fv(vce) allows to rewrite fv(vce) =Fse+Fbe
AFmaxf`(`ce)+F∗pe
with F ∗pe = Fmax( `ce−`opt
`optεpe)2, which can
robustly be integrated with coarse time steps, because it cannotrun into negative results fv(vce) < 0. Note that PE and BEengage outside the normal range of operation of the MTUand play minor roles for its dynamics in locomotion. TheMTUs share the same parameters except for four main onesthat distinguish individual muscle physiology (Tab. II).
APPENDIX IIIMTU ATTACHMENTS AND SEGMENT PROPERTIES
The MTUs connect to the skeleton by spanning one or twojoints (Tab. III). The transfer from MTU force Fm to joint

GEYER AND HERR: MUSCLE-REFLEX MODEL OF HUMAN WALKING 9
TABLE IIINDIVIDUAL MTU PARAMETERS. VALUES ARE ESTIMATED FROM [64]
ASSUMING A FORCE OF 25N PER CM2 CROSS SECTIONAL AREA (Fmax),MAXIMUM SPEEDS OF 6`opts−1 AND 12`opts−1 FOR SLOW AND
MEDIUM-FAST TWITCH MUSCLES (vmax), AND `opt AND `slack TO
REFLECT MUSCLE FIBER AND TENDON LENGTHS.
SOL TA GAS VAS HAM GLU HFLFmax(N) 4000 800 1500 6000 3000 1500 2000vmax(`opts−1) 6 12 12 12 12 12 12`opt(cm) 4 6 5 8 10 11 11`slack(cm) 26 24 40 23 31 13 10
TABLE IIIMTU ATTACHMENT PARAMETERS (VALUES MOTIVATED FROM [65]–[68]
OR ANATOMICAL ESTIMATES).
ankle knee hipSOL TA GAS GAS VAS HAM HAM GLU HFL
r0(cm) 5 4 5 5 6 5 8 10 10ϕmax(deg) 110 80 110 140 165 180 - - -ϕref (deg) 80 110 80 165 125 180 155 150 180ρ 0.5 0.7 0.7 0.7 0.7 0.7 0.7 0.5 0.5
torque τm is modeled as τm = rm(ϕ)Fm, where the leverrm(ϕ) equals r0 for the hip and r0 cos(ϕ − ϕmax) for theankle and knee. Here ϕ is the joint angle and rm gets maximalat ϕmax. Changes in MTU length are modeled as ∆`mtu =ρr(ϕ−ϕref ) for the hip and as ∆`mtu = ρr[sin(ϕ−ϕmax)−sin(ϕref − ϕmax)] for the ankle and knee, where ϕref is thejoint angle at which `mtu = `opt + `slack, and ρ accountsfor muscle pennation angles and ensures that the MTU fiberlength stays within physiological limits throughout the jointwork space.
The model’s segments are rigid bodies specified by theirmass mS , inertia ΘS , and length `S , and the positions dG,S
of the local center of mass and dJ,S of the proximal jointmeasured from the distal end (Tab. IV). The segments areconnected by revolute joints with ranges of operation, 70◦ <ϕa < 130◦, ϕk < 175◦ and ϕh < 230◦, outside of which softlimits engage (see appendix IV).
APPENDIX IVGROUND CONTACTS AND JOINT LIMITS
The model’s foot segments have toe and heel contact points(CPs). A CP’s vertical GRF is modeled as Fy = ky∆ycp(1 +∆y∗cp)(∆ycp > 0)(∆y∗cp > −1), where ky = 81.5kN/m is thevertical contact stiffness, ∆ycp, ground penetration, and ∆y∗cp,its velocity normalized to vmax = 3cms−1. This nonlinearspring-damper model is motivated from the literature [41],[69], but interprets contacts with two basic material properties:
TABLE IVSEGMENT PARAMETERS (VALUES APPROXIMATED FROM [41]).
Feet Shanks Thighs Trunk`S(cm) 20 50 50 80dG,S(cm) 14 30 30 35dJ,S(cm) 16 50 50 -mS(kg) 1.25 3.5 8.5 53.5ΘS(kgm2) 0.005 0.05 0.15 3
ground stiffness ky and maximum relaxation speed vmax. Herevmax = ∞ or 0 describes a perfectly elastic or inelasticimpact. Note that we use the same model for the joint softlimits with kj = 0.3Nm deg−1 and vmax,j = 1 deg s−1. ACP’s horizontal GRF is modeled as either sliding force Fx,sl =−sgn(xcp)µslFy or stiction force Fx,st = −kx∆xcp(1 +sgn(∆xcp)∆x∗cp), where xcp is the CP’s horizontal velocity,µsl = 0.8, the sliding friction coefficient, kx = 8.2kN/m,the horizontal contact stiffness, ∆xcp = xcp − x0, the shiftfrom the point x0 at which stiction engaged, and ∆x∗cp, itsvelocity again normalized to vmax. A CP engages in stictionif |xcp| < 1cms−1 and returns to sliding if Fx,st ≥ µstFy
with a stiction coefficient µst = 0.9.
REFERENCES
[1] T. G. Brown, “On the nature of the fundamental activity of the nervouscentres; together with an analysis of the conditioning of rhythmic activityin progression, and a theory of the evolution of function in the nervoussystem.” J Physiol, vol. 48, no. 1, pp. 18–46, 1914.
[2] G. Orlovsky, T. Deliagina, and S. Grillner, Neuronal control of loco-motion: from mollusc to man. Oxford University Press, New York,1999.
[3] I. A. Rybak, N. A. Shevtsova, M. Lafreniere-Roula, and D. A. McCrea,“Modelling spinal circuitry involved in locomotor pattern generation:insights from deletions during fictive locomotion.” J Physiol, vol. 577,no. Pt 2, pp. 617–639, 2006.
[4] V. Dietz, “Spinal cord pattern generators for locomotion.” Clin Neuro-physiol, vol. 114, no. 8, pp. 1379–1389, 2003.
[5] K. Minassian, I. Persy, F. Rattay, M. M. Pinter, H. Kern, and M. R. Dim-itrijevic, “Human lumbar cord circuitries can be activated by extrinsictonic input to generate locomotor-like activity.” Hum Mov Sci, vol. 26,no. 2, pp. 275–295, 2007.
[6] S. Grillner and P. Zangger, “On the central generation of locomotion inthe low spinal cat.” Exp Brain Res, vol. 34, no. 2, pp. 241–261, 1979.
[7] K. Pearson, O. Ekeberg, and A. Buschges, “Assessing sensory functionin locomotor systems using neuro-mechanical simulations.” TrendsNeurosci, vol. 29, no. 11, pp. 625–631, 2006.
[8] B. W. Verdaasdonk, H. F. J. M. Koopman, and F. C. T. Van der Helm,“Resonance tuning in a neuro-musculo-skeletal model of the forearm,”Biol Cybern, vol. 96, no. 2, pp. 165–80, 2007.
[9] O. Ekeberg and S. Grillner, “Simulations of neuromuscular control inlamprey swimming.” Philos Trans R Soc Lond B Biol Sci, vol. 354, no.1385, pp. 895–902, 1999.
[10] A. Ijspeert, A. Crespi, D. Ryczko, and J.-M. Cabelguen, “From swim-ming to walking with a salamander robot driven by a spinal cord model,”Science, vol. 315, no. 5817, pp. 1416–1420, 2007.
[11] D. G. Ivashko, B. I. Prilutski, S. N. Markin, J. K. Chapin, andI. A. Rybak, “Modeling the spinal cord neural circuitry controlling cathindlimb movement during locomotion,” Neurocomputing, vol. 52–54,pp. 621–629, 2003.
[12] A. Prochazka and S. Yakovenko, “The neuromechanical tuning hypoth-esis.” Prog Brain Res, vol. 165, pp. 255–265, 2007.
[13] C. Maufroy, H. Kimura, and K. Takase, “Towards a general neuralcontroller for quadrupedal locomotion.” Neural Netw, vol. 21, no. 4,pp. 667–681, 2008.
[14] N. Ogihara and N. Yamazaki, “Generation of human bipedal locomotionby a bio-mimetic neuro-musculo-skeletal model.” Biol Cybern, vol. 84,no. 1, pp. 1–11, 2001.
[15] C. Paul, M. Bellotti, S. Jezernik, and A. Curt, “Development of a humanneuro-musculo-skeletal model for investigation of spinal cord injury.”Biol Cybern, vol. 93, no. 3, pp. 153–170, 2005.
[16] S. Mochon and T. McMahon, “Ballistic walking,” J. Biomech., vol. 13,no. 1, pp. 49–57, 1980.
[17] T. McGeer, Principles of walking and running, ser. Advances in Compar-ative and Environmental Physiology. Springer-Verlag Berlin Heielberg,1992, vol. 11, ch. 4.
[18] R. Blickhan, “The spring-mass model for running and hopping,” J. ofBiomech., vol. 22, pp. 1217–1227, 1989.
[19] T. McMahon and G. Cheng, “The mechanism of running: how doesstiffness couple with speed?” J. of Biomech., vol. 23, pp. 65–78, 1990.
[20] T. McGeer, “Passive dynamic walking,” Int. J. Rob. Res., vol. 9, no. 2,pp. 62–82, 1990.

10 IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. X, NO. X, MONTH YEAR
[21] A. Seyfarth, H. Geyer, M. Gunther, and R. Blickhan, “A movementcriterion for running,” J. of Biomech., vol. 35, pp. 649–655, 2002.
[22] R. Ghigliazza, R. Altendorfer, P. Holmes, and D. Koditschek, “A simplystabilized running model,” SIAM J. Applied. Dynamical Systems, vol. 2,no. 2, pp. 187–218, 2003.
[23] A. Seyfarth, H. Geyer, and H. M. Herr, “Swing-leg retraction: a simplecontrol model for stable running,” J. Exp. Biol., vol. 206, pp. 2547–2555,2003.
[24] M. Raibert, Legged robots that balance. MIT press, Cambridge, 1986.[25] U. Saranli, M. Buehler, and D. Koditschek, “Rhex: A simple and highly
mobile hexapod robot.” Int. Jour. Rob. Res., vol. 20, no. 7, pp. 616–631,2001.
[26] S. Collins, A. Ruina, R. Tedrake, and M. Wisse, “Efficient bipedal robotsbased on passive-dynamic walkers,” Science, vol. 307, no. 5712, pp.1082–5, 2005.
[27] H. Geyer, A. Seyfarth, and R. Blickhan, “Compliant leg behaviourexplains the basic dynamics of walking and running,” Proc. R. Soc.Lond. B, vol. 273, pp. 2861–2867, 2006.
[28] A. Prochazka, D. Gillard, and D. Bennett, “Positive force feedbackcontrol of muscles,” J. of Neurophys., vol. 77, pp. 3226–3236, 1997.
[29] H. Geyer, A. Seyfarth, and R. Blickhan, “Positive force feedback inbouncing gaits?” Proc. R. Soc. Lond. B, vol. 270, pp. 2173–2183, 2003.
[30] A. Seyfarth, M. Gunther, and R. Blickhan, “Stable operation of an elasticthree-segmented leg,” Biol. Cybern., vol. 84, pp. 365–382, 2001.
[31] M. Gunther, V. Keppler, A. Seyfarth, and R. Blickhan, “Human legdesign: optimal axial alignment under constraints,” J. Math. Biol.,vol. 48, pp. 623–646, 2004.
[32] H. Herr and T. McMahon, “A trotting horse model,” Int. J. RoboticsRes., vol. 19, pp. 566–581, 2000.
[33] ——, “A galloping horse model,” Int. J. Robotics Res., vol. 20, pp.26–37, 2001.
[34] H. M. Herr, G. T. Huang, and T. A. McMahon, “A model of scale effectsin mammalian quadrupedal running.” J Exp Biol, vol. 205, no. Pt 7, pp.959–967, Apr 2002.
[35] K. Pearson and D. Collins, “Reversal of the influence of group Ibafferents from plantaris on activity in medial gastrocnemius muscleduring locomotor activity,” J. of Neurophys., vol. 70, pp. 1009–1017,1993.
[36] M. J. Grey, J. B. Nielsen, N. Mazzaro, and T. Sinkjaer, “Positive forcefeedback in human walking,” J Physiol, vol. 581, no. 1, pp. 99–105,2007.
[37] L. O. Christensen, J. B. Andersen, T. Sinkjaer, and J. Nielsen, “Tran-scranial magnetic stimulation and stretch reflexes in the tibialis anteriormuscle during human walking,” J Physiol, vol. 531, no. Pt 2, pp. 545–57,2001.
[38] N. Petersen, H. Morita, and J. Nielsen, “Modulation of reciprocalinhibition between ankle extensors and flexors during walking in man,”J Physiol, vol. 520 Pt 2, pp. 605–19, 1999.
[39] T. Mergner, C. Maurer, and R. J. Peterka, “A multisensory posturecontrol model of human upright stance,” Prog Brain Res, vol. 142, pp.189–201, 2003.
[40] S. M. O’Connor and A. D. Kuo, “Direction dependent control of balanceduring walking and standing,” J Neurophysiol, 2009.
[41] M. Gunther and H. Ruder, “Synthesis of two-dimensional human walk-ing: a test of the λ-model,” Biol. Cybern., vol. 89, pp. 89–106, 2003.
[42] V. T. Inman, H. J. Ralston, F. Todd, and J. C. Lieberman, Humanwalking. Baltimore: Williams & Wilkins, 1981.
[43] V. Dietz and S. J. Harkema, “Locomotor activity in spinal cord-injuredpersons,” J Appl Physiol, vol. 96, no. 5, pp. 1954–60, 2004.
[44] M. Y. C. Pang and J. F. Yang, “Sensory gating for the initiation ofthe swing phase in different directions of human infant stepping,” JNeurosci, vol. 22, no. 13, pp. 5734–40, 2002.
[45] C. Schneider, M. C. Do, and B. Bussel, “Increase of the contraction ofthe stance soleus muscle in human does not delay the swing phase instep elicited by forward fall,” C R Acad Sci III, vol. 320, no. 9, pp.709–14, 1997.
[46] S. N. Zill, B. R. Keller, and E. R. Duke, “Sensory signals of unloading inone leg follow stance onset in another leg: transfer of load and emergentcoordination in cockroach walking,” J Neurophysiol, vol. 101, no. 5, pp.2297–304, 2009.
[47] T. Lam and K. G. Pearson, “Proprioceptive modulation of hip flexoractivity during the swing phase of locomotion in decerebrate cats,” JNeurophysiol, vol. 86, no. 3, pp. 1321–32, Sep 2001.
[48] J. J. Eng, D. A. Winter, and A. E. Patla, “Strategies for recovery froma trip in early and late swing during human walking,” Exp Brain Res,vol. 102, no. 2, pp. 339–49, 1994.
[49] H. W. Van de Crommert, M. Faist, W. Berger, and J. Duysens, “Bicepsfemoris tendon jerk reflexes are enhanced at the end of the swing phasein humans,” Brain Res, vol. 734, no. 1-2, pp. 341–4, 1996.
[50] J. Perry, Gait analysis: normal and pathological function. SLACK Inc.,Thorofare, NJ, 1992.
[51] L. Li and G. E. Caldwell, “Coefficient of cross correlation and the timedomain correspondence,” J Electromyogr Kinesiol, vol. 9, no. 6, pp.385–9, 1999.
[52] T. A. L. Wren, K. P. Do, S. A. Rethlefsen, and B. Healy, “Cross-correlation as a method for comparing dynamic electromyographysignals during gait,” J Biomech, vol. 39, no. 14, pp. 2714–8, 2006.
[53] J. U. Baumann, H. Ruetsch, and K. Schurmann, “Distal hamstringlengthening in cerebral palsy. an evaluation by gait analysis,” Int Orthop,vol. 3, no. 4, pp. 305–9, 1980.
[54] A. J. Ijspeert, “Central pattern generators for locomotion control inanimals and robots: a review.” Neural Netw, vol. 21, no. 4, pp. 642–653,2008.
[55] L. S. Illis, “Is there a central pattern generator in man?” Paraplegia,vol. 33, no. 5, pp. 239–40, 1995.
[56] A. Lundberg, “Reflex control of stepping,” In: The Nansen memoriallecture V, Oslo: Universitetsforlaget, pp. 5–42, 1969.
[57] G. Taga, “A model of the neuro-musculo-skeletal system for humanlocomotion. I. Emergence of basic gait,” Biol. Cybern., vol. 73, no. 2,pp. 97–111, 1995.
[58] K. G. Pearson, “Generating the walking gait: role of sensory feedback.”Prog Brain Res, vol. 143, pp. 123–129, 2004.
[59] H. Hultborn, “Spinal reflexes, mechanisms and concepts: from Eccles toLundberg and beyond.” Prog Neurobiol, vol. 78, no. 3-5, pp. 215–232,2006.
[60] A. Prochazka, V. Gritsenko, and S. Yakovenko, “Sensory control oflocomotion: reflexes versus higher-level control.” Adv Exp Med Biol,vol. 508, pp. 357–367, 2002.
[61] J. M. Donelan, D. A. McVea, and K. G. Pearson, “Force regulation ofankle extensor muscle activity in freely walking cats.” J Neurophysiol,vol. 101, no. 1, pp. 360–371, 2009.
[62] T. Sinkjaer, J. B. Andersen, M. Ladouceur, L. O. Christensen, and J. B.Nielsen, “Major role for sensory feedback in soleus EMG activity in thestance phase of walking in man.” J Physiol, vol. 523 Pt 3, pp. 817–827,2000.
[63] M. A. Daley, G. Felix, and A. A. Biewener, “Running stability isenhanced by a proximo-distal gradient in joint neuromechanical control.”J Exp Biol, vol. 210, no. Pt 3, pp. 383–394, 2007.
[64] G. T. Yamaguchi, A. G.-U. Sawa, D. W. Moran, M. J. Fessler, and J. M.Winters, “A survey of human musculotendon actuator parameters,” inMultiple Muscle Systems: Biomechanics and Movement Organization,J. Winters and S.-Y. Woo, Eds. Springer-Verlag, New York, 1990, pp.717–778.
[65] T. Muraoka, Y. Kawakami, M. Tachi, and T. Fukunaga, “Muscle fiberand tendon length changes in the human vastus lateralis during slowpedaling,” J. Appl. Physiol., vol. 91, pp. 2035–2040, 2001.
[66] C. Maganaris, “Force-length characteristics of in vivo human skeletalmuscle,” Acta Physiol. Scand., vol. 172, pp. 279–285, 2001.
[67] ——, “Force-length characteristics of the in vivo human gastrocnemiusmuscle,” Clin. Anat., vol. 16, pp. 215–223, 2003.
[68] T. Oda, H. Kanehisa, K. Chino, T. Kurihara, T. Nagayoshi, E. Kato,T. Fukunaga, and Y. Kawakami, “In vivo lenth-force relationships onmuscle fiver and muscle tendon complex in the tibialis anterior muscle,”Int. J. Sport and Health Sciences, vol. 3, pp. 245–252, 2005.
[69] S. Scott and D. Winter, “Biomechanical model of the human foot:kinematics and kinetics during the stance phase of walking,” J. Biomech.,vol. 26, no. 9, pp. 1091–1104, 1993.