adaptive automation for human performance in large-scale networked systems
DESCRIPTION
Adaptive Automation for Human Performance in Large-Scale Networked Systems. Raja Parasuraman Ewart de Visser George Mason University. Kickoff Meeting, Carnegie Mellon University, August 26, 2008. AFOSR MURI: Modeling Synergies in Large-Scale Human-Machine Networked Systems. Research Goals. - PowerPoint PPT PresentationTRANSCRIPT

Adaptive Automation for Human Performance in Large-Scale
Networked SystemsRaja Parasuraman
Ewart de VisserGeorge Mason University
Kickoff Meeting, Carnegie Mellon University, August 26, 2008. AFOSR MURI: Modeling Synergies in Large-Scale Human-Machine Networked Systems

2
Research Goals
• Develop validated theories and techniques to predict behavior of large-scale, networked human-machine systems involving unmanned vehicles
• Model human decision making efficiency in such networked systems
• Investigate the efficacy of adaptive automation to enhance human-system performance

3
Collaborations with MURI Team Members
Cornell/MIT/Pitt
GMU CMU
All
Human-Robot Team Performance and Modeling
Human-Agent Collaboration
Scaling up to Large Networks

4
George Mason University Approach
• Conduct empirical and modeling studies of human decision making performance with multiple robotic assets
• Examine human-system performance using the Distributed Decision Making simulation (DDD Version 4) – (with Mark Campbell of Cornell)
• Examine efficacy of Adaptive Delegation Interface (ADI) with Machinetta for Human-Agent collaboration – (with Paul Scerri of CMU)
• Develop human-robot performance metrics for use in large networks
5
Joint GMU-Cornell Approach
• Examine human-system performance (1-4 person teams, multiple unmanned vehicles, using DDD) in simulated reconnaissance missions (GMU)
• Model human decision-making performance (Cornell)• Identify and quantify human “cognitive bottlenecks” (GMU and
Cornell) • Identify points for “adaptive tasking” or adaptive automation
(GMU and Cornell)• Scale up to larger networks (more UVs and agents)

Proxy Proxy ProxyTeamwork Proxies
playbook
Adaptable Automation
Invocation method
Adaptive Automation
Performance Based
Event Based
Model Based
Parasuraman (2000); Kaber & Endsley (2004); Scerri et al. (2006); Miller & Parasuraman (2007))
Adaptable/Adaptive Automation

Playbook Interface for RoboFlag
• Playbook: Enables human-automation communication about plans, goals, and methods—akin to calling “plays” from a sports team’s playbook (Miller & Parasuraman, 2007)
• Validation experiments with RoboFlag• (Parasuraman et al., IEEE SMC-Part A, 2005)• Human operator supervises multiple Blue
Team robots using a delegation interface (Playbook)
• Adapted from Cornell University• Work done under DARPA MICA Program
Methods Single operator sends a team of 4-8 robots (blue team) into opponent territory (populated by red team robots)
to locate a specified target and return home as quickly as possible
User has Playbook of automated tools to direct robots Waypoint (point and click) control (“Manual”) Automated plays (Circle offense; Circle defense; Patrol border)
User selects number of robot(s) to which plays are assigned User can intervene in robot execution of a play and apply corrective measures if necessary Red team robot tactics predictable (always offensive or defensive) or unpredictable (either offensive or
defensive)

9
Hypotheses for Efficacy of Playbook Interface
• Use of automated plays at times of user’s choosing enhances mission success rate and reduces mission completion time
• Flexible use or either automated plays or manual control allows user to compensate for “brittleness” of automation– particularly when opponent tactics are
unpredictable• Management workload associated with
delegation is only low to moderate
10
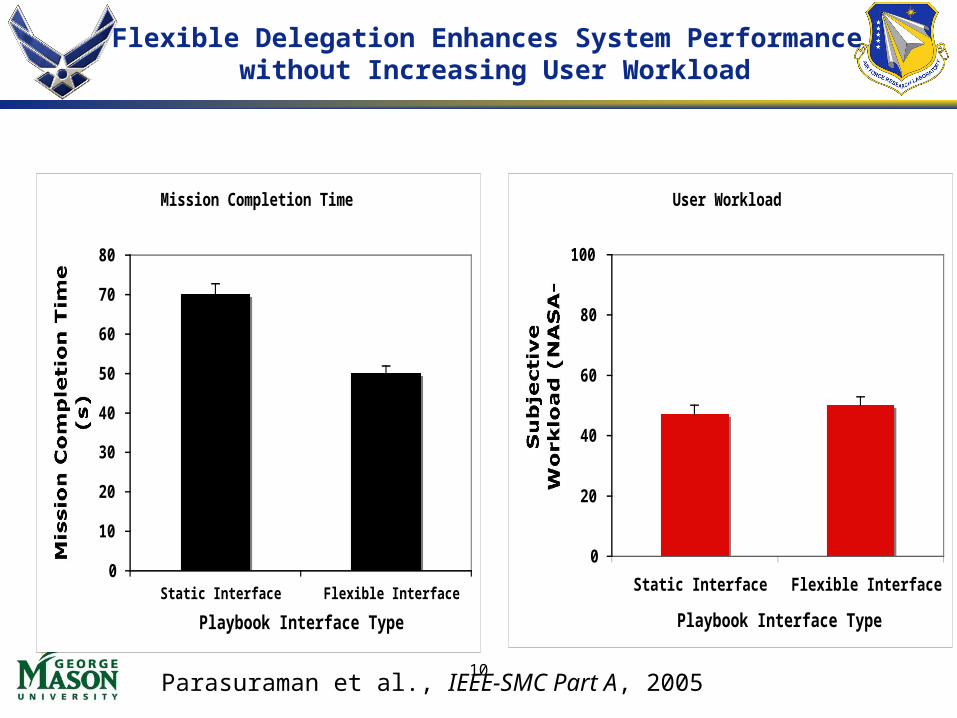
Flexible Delegation Enhances System Performance without Increasing User Workload
User Workload
0
20
40
60
80
100
Static Interface Flexible Interface
Playbook Interface Type
Subjective
Workload (NASA-
Mission Completion Time
0
10
20
30
40
50
60
70
80
Static Interface Flexible Interface
Playbook Interface Type
Mission Completion Time
(s)
Parasuraman et al., IEEE-SMC Part A, 2005

11
Playbook for Pre-Mission UCAV Planning
• User can call high-end play—e.g., Airfield Denial, or
• Stipulate the method and procedure for doing Airfield Denial by
– filling in specific variable values (i.e., which airfield to be attacked)
– what UAVs to be used
– where they should rendezvous
– stipulate
– which sub-methods and optional task path branches to be used
– Etc. Miller & Parasuraman, Human Factors, 2007

Simulation Platforms at GMU
• DDD 4.0– 1-4 person teams– Large numbers of UVs/agents
• Adaptive Delegation Interface (ADI)– Designed for planning, executing,
and monitoring UV movements
– Adaptable: High level plans can be proposed by the user and modified by the automation
– Adaptive: UVs can autonomously adjust to certain events in the scenario
12

13
Adaptive Delegation For Planning
• Delegation Interfaces: Execution– Many Human-Robot interfaces are primarily execution based– RoboFlag is an example of an execution-based delegation
interface• Delegation Interfaces: Planning
– Little prior work on real-time planning with robotic vehicles– Related work on route planning for pilots: Layton et al. (1994)
• Preliminary research under DARPA's Multiagent Adjustable Autonomy Framework (MAAF) for Multi-Robot, Multi-Human Teams (with Amos Freedy).

14
Battle Space
Robotic Operator
AdaptiveInterface
AutomatedPlanningAssistant
DoctrineChecker
Machinetta
plan
instructions
planning
feedback
planning
feedback
Plan verification
with doctrine
automated plan generation Sending instructions to vehicles plan execution monitoring
Adaptive Delegation Concept
Shared task model

15
Automated Route Planning
- Task ordering goes through all possible permutations of the given tasks (if requested) and submits to Machinetta a specific task order to be followed.
- Machinetta generates the optimized path plan to reach target locations
- Post processing makes use of Machinetta generated paths (for the SEARCH task type) and introduces loading/unloading time (for the EXTRACT task type) into plans.
Machinetta
Post Processing
Task Ordering UV1 Time Steps
Reg
ions
01
23
45
67
8
1 2 30
UV2 Time Steps
- Given target location, current location of vehicle and time, fuel, task importance and risk avoidance importance; Machinetta iterates through all possible region traversal options and converges on the best (in terms of time, fuel and risk) trajectory possible. (one such trajectory for a vehicle, 4 time steps and 9 regions is shown in figure above)
- Machinetta takes into account both user specified parameters (such as task and risk importance), as well as vehicle capabilities (such as speed and fuel), and generates plans that can implement such complex behaviors as delayed action and risk avoidance.
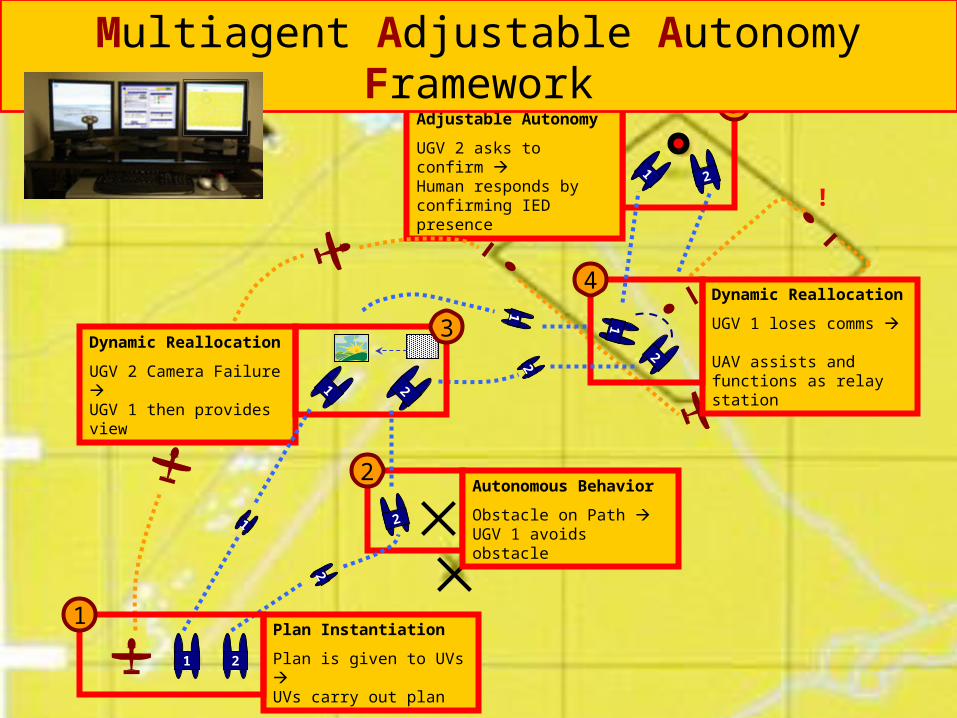
Plan Instantiation
Plan is given to UVs UVs carry out plan
Autonomous Behavior
Obstacle on Path UGV 1 avoids obstacle
2
Dynamic Reallocation
UGV 2 Camera Failure UGV 1 then provides view
1
1 2
2
2
21
2
21
!1 2
Adjustable Autonomy
UGV 2 asks to confirm Human responds by confirming IED presence
5
Multiagent Adjustable Autonomy Framework
Dynamic Reallocation
UGV 1 loses comms UAV assists and functions as relay station
1
4
3
1
17
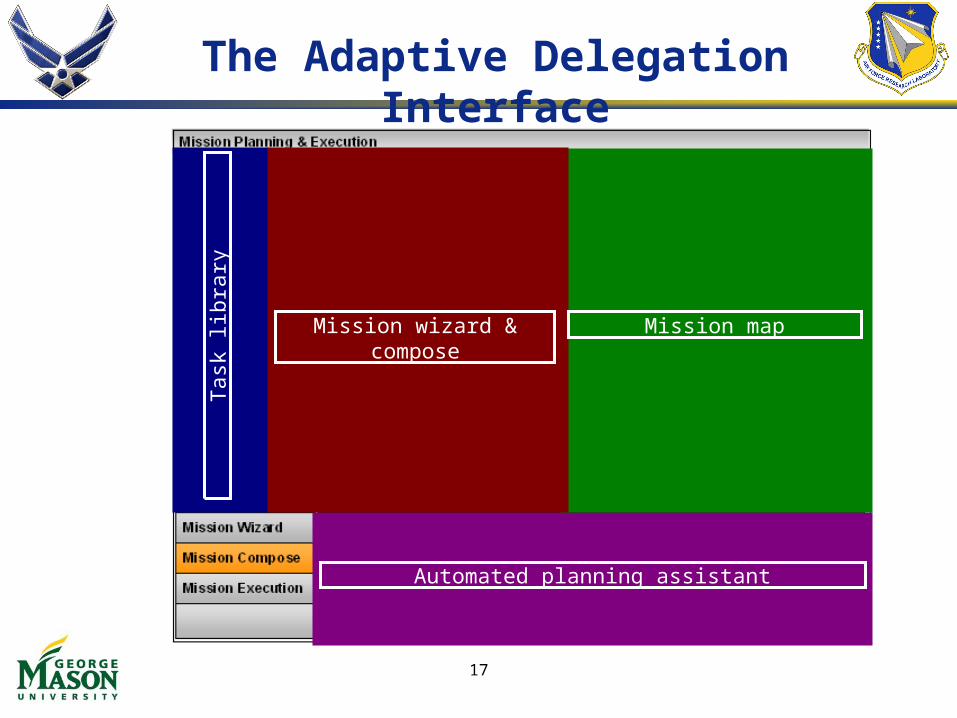
The Adaptive Delegation Interface
Mission wizard & compose
Mission map
Task
lib
rary
Automated planning assistant

18
Mission Planning & Execution
Task Library
Mission Execution
Mission Compose
Mission Wizard
Mission Map
Automated Planning Assistant
Compose View
Rescue & Extract
Reconnaissance
Plays
Tasks
Super Plays
move
search
wait
avoid
extract
stop
go home
UAV Recon clockwise
UAV Recon counter-clockwise
UAV Recon
UGV Recon & Extract
Reactions
Execute planFinish plan
Time Damage Victims Overall Plan ID Iter Type Assets
Plan A 2 R&E 1 UAV, 2 UGV
Submit planModify plan
Type Message Content
Plan B 2 R&E 1 UAV, 2 UGV
45 20 5 60
55 35 4 45
Standing By
Review You should include a UAV in the plan before submission
Status New plans have been generated
Review plan
UAV 1
vehicle parameterstasks
UAV Recon
G1
MoveG1
UAV Recon
B5
-
+
SearchG1
UGV 1,2
vehicle parameterstasks
UGV Recon & Extract
G1, B5
MoveG1
SearchG1
ExtractG1
MoveB5
--UAV Recon
counterclockwise
add asset delete asset
+
2:00
Mission Parameters+
Finish plan Submit planCheck plan

2
1
3
Agent Status Panel
Task StatusRole Action
Provide Camera support
TimeIssues
Re-defining role… unknownCamera Failure
Disarm IED Moving to IED location ~10 min.None
Recon & clear area
of IEDsunknown
Task Message Center
Cannot see IED Role-reallocation…
Vehicle TimelineSensors
Talon 1
Talon 3
Units Assets
Talon Unit Alpha (2/3)MI Company
Agent Control Panel
Talon 23
Talon Unit Alpha
3 3
STOP
1
T1
T2
14:05
14:05
Options Pop-out
20
Advantages of using the Adaptive Delegation Interface
• Users can give high-level commands to a set of vehicles– No need to input each task individually– Automation can generate and finish plans– Humans can adjust plans as needed
• Users can monitor executed plans and intervene if necessary
• Minimal training needed (20-30 min.)