an inverse problem related to the hyperthermia …
TRANSCRIPT

AN INVERSE PROBLEM RELATED TO THE
HYPERTHERMIA TREATMENT OF CANCER
Bernard Lamien1, Helcio R. B. Orlande1,
Guillermo E. Eliçabe2, André J. Maurente3
1Federal University of Rio de Janeiro, PEM/COPPE, CP 68503, Rio de Janeiro,
RJ, 21941-972, Brazil, [email protected] 2Inst. Mat. Science and Technology (INTEMA), Univ. Mar del Plata (CONICET)
- Mar del Plata, Argentina 3Federal University of Rio Grande do Norte - UFRN, 59078-970, Natal, RN -
Brasil
1
Bernard Lamien, Helcio R. B. Orlande, Guillermo E. Eliçabe, André J. Maurente, State Estimation Problem In
Hyperthermia Treatment Of Tumors Loaded With Nanoparticles, Proceedings of the 15th International Heat Transfer
Conference, IHTC-15, August 10-15, 2014, Kyoto, Japan, IHTC15-8772

SUMMARY
• Motivation
• State estimation problems
• Particle filter – Algorithms and other
applications in Biomedical Engineering
• Test-case with simulated data: Model reduction
and Approximation Error Model
• Conclusions and Ongoing Work

Hyperthermia
• Temperature increase of body tissues, globally or locally,
possibly for therapeutic purposes.
• Dr. William Coley reported in 1891 the effect of fever on
tumors: Coley’s toxin, which was a cocktail of bacteria
(hyperthermia and immunotherapy).
• In thermoablation, heat is solely used for the destruction of
cancerous tissues. The term hyperthermia is used when heat
is applied to make tumors more vulnerable to other kinds of
treatment, such as radiotherapy and chemotherapy.
• Radio frequency ablation (RFA) is a current medical
procedure. Tissue is ablated using the heat generated from
high frequency alternating current (350–500 kHz).
MOTIVATION (See, for example, D. Chatterjee, S. Krishnan, Gold Nanoparticle –Mediated Hyperthermia in Cancer Therapy, Chapter
14 in Cancer Nanotechnology, editors S. Cho and S Krishnan, CRC Press, Boca Raton, 2013)

Hyperthermia
• Thermoablation causes direct cell necrosis (T > 50 oC).
• Hypertermia (41oC - 45oC) induces apoptosis (cell death
mechanism).
• Can be classified based on the target (Whole-body, Regional,
Local) or on the form (External, Interstitial, Intracavitary).
• In the Near Infrared (NIR) range (700 nm – 1400 nm)
hemoglobin and water absorption is minimum. Similar
behavior for Radio Frequency (RF) (3 kHz – 300 GHz).
• Heating time is also important: thermal dose
• Destruction of healthy cells and regrowth of tumor is a
problem.
MOTIVATION (See, for example, D. Chatterjee, S. Krishnan, Gold Nanoparticle –Mediated Hyperthermia in Cancer Therapy, Chapter
14 in Cancer Nanotechnology, editors S. Cho and S Krishnan, CRC Press, Boca Raton, 2013)

MOTIVATION
• Metallic nanoparticles exhibit Surface
Plasmon Resonance, which increases
absorption and scattering of light:
heating is enhanced.
• Plasmon is a quantum of the free
electrons ocillation.
• Nanoparticles can be made resonant
to particles at specific wavelengths.
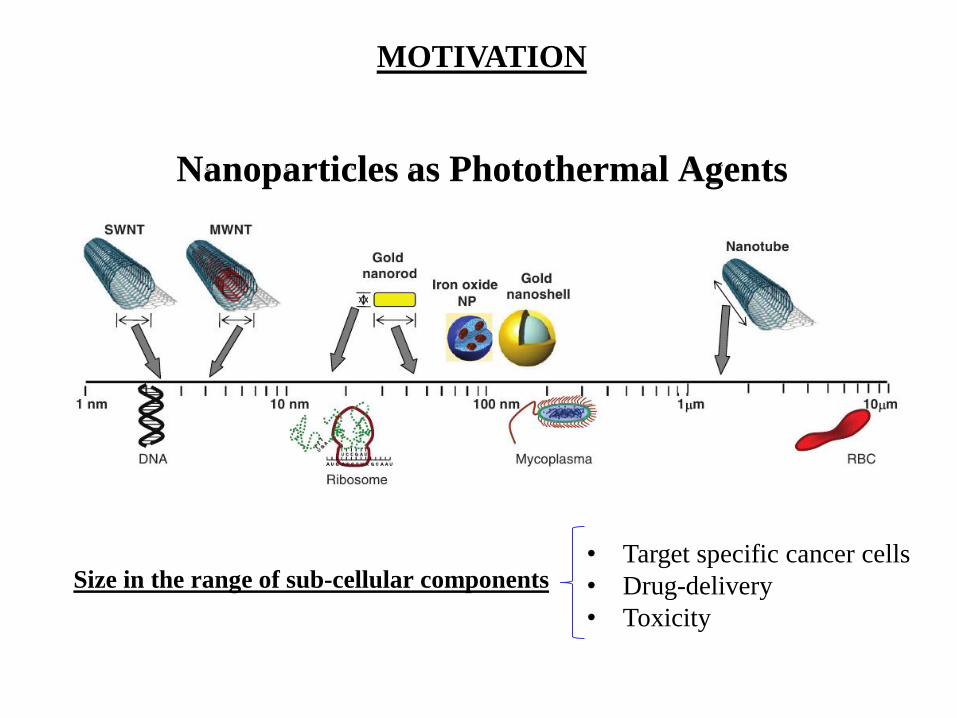
Nanoparticles as Photothermal Agents
Size in the range of sub-cellular components
MOTIVATION
• Target specific cancer cells
• Drug-delivery
• Toxicity

Inverse Problems in Hyperthermia
Dependence of the temperature distribution on laser parameters and tissue
properties, particularly blood perfusion coefficient. Tissue properties are
dependent of the physiological state and exhibit large variability from
individual to individual: Difficulty to predict a thermal dose
Hyperthermia treatment modalities requires generally treatment planning
even a predictive control of the temperature distribution in order to
minimize damage to healthy cells.
MRTI - Magnetic Ressonance Temperature Imaging can be used for
monitoring the delivery of thermal energy in tissues in real time (see R. Satfford,
J. Hazle, Magnetic Resonance Temperature imaging for Gold Nanoparticle-Mediated Thermal Therapy,
Chapter 15 in in Cancer Nanotechnology, editors S. Cho and S Krishnan, CRC Press, Boca Raton, 2013)
Uncertain models and uncertain measurements: Bayesian filters for the
solution of State Estimation problems
Particle filters: Computationally demanding, but Reduced Models can be
used together with the Approximation Error Model
MOTIVATION

STATE ESTIMATION PROBLEM
State Evolution Model:
Observation Model: ( , )k k k kz h x n
xnRx
Subscript k = 1, 2, …, denotes an instant tk in a
dynamic problem
= state variables to be estimated
vnRv
znRz
nnRn
= state noise
= measurements
= measurement noise
xk = fk (xk-1, uk-1, vk-1)
u R np = input variable

STATE ESTIMATION PROBLEM
Definition: The state estimation problem aims at
obtaining information about xk based on the state
evolution model and on the measurements given by
the observation model.

The evolution-observation model is based on the following assumptions :
(i) The sequence kx for k = 1, 2, …, is a Markovian process, that is,
0 1 1 1( , , , ) ( )k k k k x x x x x x
(ii) The sequence kz for k = 1, 2, …, is a Markovian process with respect to
the history of kx
, that is,
0 1( , , , ) ( )k k k k z x x x z x
(iii) The sequence kx
depends on the past observations only through its own
history, that is,
1 1: 1 1( , ) ( )k k k k k x x z x x
State Evolution Model:
Observation Model: ( , )k k k kz h x n
xk = fk (xk-1, uk-1, vk-1)
STATE ESTIMATION PROBLEM

State Evolution Model:
Observation Model: ( , )k k k kz h x n
xk = fk (xk-1, uk-1, vk-1)
1. The prediction problem, concerned with the determination of 1: 1( )k k x z ;
2. The filtering problem, concerned with the determination of 1:( )k k x z ;
3. The fixed-lag smoothing problem, concerned the determination of 1:( )k k p x z ,
where 1p
is the fixed lag;
4. The whole-domain smoothing problem, concerned with the determination of
1:( )k K x z , where 1: { , 1, , }K i i K z z is the complete sequence of
measurements.
Different problems can be considered:
STATE ESTIMATION PROBLEM

(x0)
Prediction
(x1)
Update
(x1 |x0)
(z1 |x1)
(x1| z1)
Prediction
(x2 | z1)
Update
(x2 |x1)
(z2 |x2)
(x2| z1:2)
(x0)
Prediction
(x1)
Update
(x1 |x0)
(z1 |x1)
(x1| z1)
Prediction
(x2 | z1)
Update
(x2 |x1)
(z2 |x2)
(x2| z1:2)
FILTERING PROBLEM
By assuming that
is available, the posterior probability
density is then obtained
with Bayesian filters in two steps:
prediction and update
0 0 0( ) ( ) x z x
1:( )k k x z

THE KALMAN FILTER
• Evolution and observation models are linear.
• Noises in such models are additive and Gaussian, with
known means and covariances.
• Optimal solution if these hypotheses hold.
k k k k z H x n
State Evolution Model:
Observation Model:
• F and H are known matrices for the linear evolutions of the state x and of the
observation z, respectively.
• G is matrix that determines how the control u affects the state x.
• Vector s is assumed to be a known input .
• Noises v and n have zero means and covariance matrices Q and R, respectively.
x𝑘− = F𝑘x𝑘−1 +G𝑘u𝑘−1 + s𝑘−1+v𝑘−1

THE PARTICLE FILTER
• Monte-Carlo techniques are the most general and robust for
non-linear and/or non-Gaussian distributions.
• The key idea is to represent the required posterior density
function by a set of random samples (particles) with associated
weights, and to compute the estimates based on these samples
and weights.
• Introduced in the 50’s, but not much used until recently
because of limited computational resources.
• Particles degenerated very fast in early implementations, i.e.,
most of the particles would have negligible weight. The
resampling step has a fundamental role in the advancement of
the particle filter.

Sampling Importance Resampling (SIR) Algorithm (Ristic, B., Arulampalam, S., Gordon, N., 2004, Beyond the Kalman Filter, Artech House, Boston)

Sampling Importance Resampling (SIR) Algorithm (Ristic, B., Arulampalam, S., Gordon, N., 2004, Beyond the Kalman Filter, Artech House, Boston)
Step 1
For 1, ,i N draw new particles xi
k from the prior
density 1x xi
k k and then use the likelihood density
to calculate the correspondent weights z xi i
k k kw .
Step 2
Calculate the total weight 1
Ni
w k
i
T w
and then normalize
the particle weights, that is, for 1, ,i N let 1i i
k w kw T w
Step 3
Resample the particles as follows :
Construct the cumulative sum of weights (CSW) by
computing 1
i
i i kc c w for 1, ,i N , with 0 0c .
Let 1i and draw a starting point 1u from the uniform
distribution 10,U N
For 1, ,j N
Move along the CSW by making 1
1 1ju u N j
While j iu c make 1i i .
Assign sample j i
k kx x
Assign sample 1j
kw N
• Weights are easily evaluated and
importance density easily
sampled.
• Sampling of the importance
density is independent of the
measurements at that time. The
filter can be sensitive to outliers.
• Resampling is applied every
iteration, which can result in fast
loss of diversity of the particles.

Auxiliary Sampling Importance Resampling (ASIR) Algorithm (Ristic, B., Arulampalam, S., Gordon, N., 2004, Beyond the Kalman Filter, Artech House, Boston)
Step 1
For i=1,...,N draw new particles xki from the prior density
(xk|xik-1) and then calculate some characterization of xk,
given xik-1, as for example the mean i
k=E[xk|xik-1]. Then
use the likelihood density to calculate the correspondent
weights wik=(zk|
ik)w
ik-1
Step 2
Calculate the total weight t=i wik and then normalize the
particle weights, that is, for i=1,...,N let wik = t-1 wi
k
Step 3
Resample the particles as follows :
Construct the cumulative sum of weights (CSW) by
computing ci=ci-1+wik for i=1,...,N, with c0=0
Let i=1and draw a starting point u1 from the uniform
distribution U[0,N-1]
For j=1,...,N
Move along the CSW by making uj=u1+N-1(j-1)
While uj>ci make i=i+1
Assign sample xjk=xi
k
Assign sample wjk=N-1
Assign parent ij=i
Step 4
For j=1,...,N draw particles xkj from the prior density
(xk|xij
k-1), using the parent ij, and then use the likelihood density to calculate the correspondent weights
wjk=(zk|x
jk) / (zk|
ijk)
Step 5
Calculate the total weight t=j wjk and then normalize the
particle weights, that is, for j=1,...,N let wjk = t-1 wj
k
• The advantage of ASIR over SIR is that
it naturally generates points from the
sample at k-1, which, conditioned on the
current measurement, are most likely to
be close to the true state.
• The resampling is based on some point
estimate ik that characterize (xk|x
ik-1),
which can be the mean ik=E[(xk|x
ik-1)]
or simply a sample of (xk|xik-1). If the
state evolution model noise is small,
(xk|xik-1) is generally well characterized
by ik, so that the weights wi
k are more
even and the ASIR algorithm is less
sensitive to outliers than the SIR
algorithm. On the other hand, if the state
evolution model noise is large, the single
point estimate ik in the state space may
not characterize well (xk|xik-1) and the
ASIR algorithm may not be as effective
as the SIR algorithm.

Application: Hodgkin-Huxley’s model Hodgkin, A.L., Huxley, A.F. "A Quantitative Description of Membrane Current and It's Application to Conduction and
Excitation in Nerve", Journal of Physiology, vol. 117, pp. 500-544, Mar. 1952.
• Action potential in excitable cells
• Sodium, Potassium and other ions accross the cell membrane
3 4máx máxmm Na m Na k m k L m L
dVI C G m h V V G n V V G V V
dt
1m m
dmm m
dt
(3.12)
1h h
dhh h
dt
(3.13)
1n n
dnn n
dt
(3.14) Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013
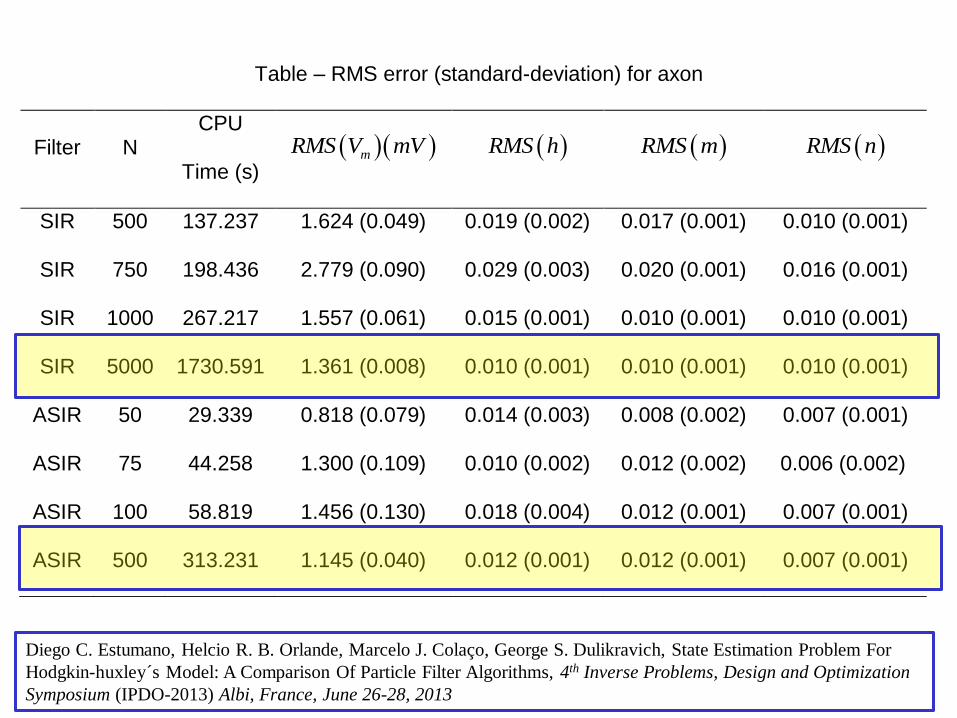
Table – RMS error (standard-deviation) for axon
Filter N CPU
Time (s) mRMS V mV RMS h RMS m RMS n
SIR 500 137.237 1.624 (0.049) 0.019 (0.002) 0.017 (0.001) 0.010 (0.001)
SIR 750 198.436 2.779 (0.090) 0.029 (0.003) 0.020 (0.001) 0.016 (0.001)
SIR 1000 267.217 1.557 (0.061) 0.015 (0.001) 0.010 (0.001) 0.010 (0.001)
SIR 5000 1730.591 1.361 (0.008) 0.010 (0.001) 0.010 (0.001) 0.010 (0.001)
ASIR 50 29.339 0.818 (0.079) 0.014 (0.003) 0.008 (0.002) 0.007 (0.001)
ASIR 75 44.258 1.300 (0.109) 0.010 (0.002) 0.012 (0.002) 0.006 (0.002)
ASIR 100 58.819 1.456 (0.130) 0.018 (0.004) 0.012 (0.001) 0.007 (0.001)
ASIR 500 313.231 1.145 (0.040) 0.012 (0.001) 0.012 (0.001) 0.007 (0.001)
Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013

Axon
0 10 20 30 40 50 60-40
-20
0
20
40
60
80
100
120
time (ms)
Vm
(m
V)
Exact
Measurement
Estimated
99% Conf.Int
Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013

Axon
0 10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
time (ms)
Innactivation h
Exact
Estimated
99% Conf.Int
Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013

Purkinje Fiber
100 200 300 400 500 600 700 800 900 1000
-80
-60
-40
-20
0
20
time (ms)
Vm
(m
V)
Exact
Measurement
Estimated
99% Conf.Int
Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013

Purkinje Fiber
0 100 200 300 400 500 600 700 800 900 1000-0.2
0
0.2
0.4
0.6
0.8
1
1.2
time (ms)
Innactivation h
Exact
Measurement
Estimated
99% Conf.Int
Diego C. Estumano, Helcio R. B. Orlande, Marcelo J. Colaço, George S. Dulikravich, State Estimation Problem For
Hodgkin-huxley´s Model: A Comparison Of Particle Filter Algorithms, 4th Inverse Problems, Design and Optimization
Symposium (IPDO-2013) Albi, France, June 26-28, 2013

Simultaneous Estimation of State Variables and Model Parameters (J. Liu and M. West, Combined Parameter and State Estimation in Simulation-Based Filtering, Chapter 10 in
Sequential Monte Carlo Methods in Practice, Springer, ed. Doucet, A., Freitas, N. Gordon, N., 2001.)
• Evolution and observation models contain several constant
parameters, here denoted as the vector q.
• The above description of the particle filter method was based on a
deterministic vector q.
• However, in general such parameters are not deterministic or
might not be deterministically known.
• Therefore, the samples need to be extended to: { , : 0, , }i i
k k i Nx θ
1: 1: 1 1: 1( , ) ( , ) ( , ) ( )k k k k k k k x θ z z x θ x θ z θ z
2
1: 1 1 1 1
1
( ) ( , )N
i i
k k k k
i
w N h
θ z θ m V

APPLICATION: TUMOR SIZE EVOLUTION
This model involves as state variables the numbers of tumor (N1),
normal (N2) and angiogenic cells (L1), as well as the mass of the
chemotherapy drug in body (Q). It deals with the use of one single
chemotherapy cycle-unspecific agent, in a neoadjuvant treatment.
11 1 1 1 1 1 1 2 1 1 1
( )( , ) ( , , ) ( , )
d N tr N f N L g N N L h N Q
dt (1.a)
22 2 2 2 2 1 2 1 2 2
( )( ) ( , , ) ( , )
d N tr N f N g N N L h N Q
dt (1.b)
11 1 1 1 1 3 1
( )( ) ( , ) ( , ) ( , )
d L tm L n N L p N L h L Q
dt (1.c)
1 2
( )( ) ( , , )
dQ tq t u N N Q
dt (1.d)
Model developed by Diego Rodrigues, Paulo Mancera and Suani de Pinho

ri is the rate of cell population growth, fi(.) is the growth inhibition due to the
competition among cells of the same type for nutrients, etc, and gi(.) is the growth
inhibition due to the competition among cells of different types for nutrients, etc.
The functions hi(.), for i = 1, 2 and 3, model the interactions of the cell populations
with the chemotherapy drug. Hence, note that h3(.) models the antiangiogenic
effects of the chemotherapy agent. The tumor capacity to induce vascularization is
represented by n(.), while the body capacity to inhibit vascularization is modeled
by p(.). The function m(.) models the proliferation of endothelial cells and their
migration towards the tumor internal region. The infusion of the chemotherapy
agent is given by q(t), while u(.) is the model for the drug consumption and
excretion. 1
1 1 1 1 1 1 1 2 1 1 1
( )( , ) ( , , ) ( , )
d N tr N f N L g N N L h N Q
dt (1.a)
22 2 2 2 2 1 2 1 2 2
( )( ) ( , , ) ( , )
d N tr N f N g N N L h N Q
dt (1.b)
11 1 1 1 1 3 1
( )( ) ( , ) ( , ) ( , )
d L tm L n N L p N L h L Q
dt (1.c)
1 2
( )( ) ( , , )
dQ tq t u N N Q
dt (1.d)

APPLICATION: TUMOR SIZE EVOLUTION
1 1 1 2 11 1
1 1
( )1
d N t N N N Qr N
dt k L k L a Q
(7.a)
2 2 2 1 22 2
2 2
( )1
d N t N N N Qr N
dt k k b Q
(7.b)
1 11 1 1 1
( )d L t L QL N L N
dt c Q
(7.c)
( )( )
dQ tq t Q
dt (7.d)
• The simulated measured data was generated for a case involving a standard
chemotherapy protocol for the treatment of pancreatic cancer based on
GEMZAR®.
• The protocol consists of one intravenous administration per week for three
consecutive weeks, followed by one week of rest.
• The simulated measurements of the numbers of tumor and normal cells were
supposedly available periodically, every seven days after beginning of the
treatment.

-20 0 20 40 60 80 100 120 1400.5
1
1.5
2
2.5
3
3.5x 10
9
Time, days
Num
ber
of
tum
or
cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(a)
-20 0 20 40 60 80 100 120 1403
4
5
6
7
8
9
10
11
12
13x 10
12
Time, days
Num
ber
of
norm
al cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(b)
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5x 10
11
Time, days
Num
ber
of
angio
genic
cells
Exact
Estimated
99% Bounds
(c)
0 20 40 60 80 100 120-1
0
1
2
3
4
5
6x 10
-4
Time, days
Mass o
f dru
g in t
he b
lood,
mg
Exact
Estimated
99% Bounds
(d)

-20 0 20 40 60 80 100 120 1400.5
1
1.5
2
2.5
3
3.5x 10
9
Time, days
Num
ber
of
tum
or
cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(a)
-20 0 20 40 60 80 100 120 1403
4
5
6
7
8
9
10
11
12
13x 10
12
Time, days
Num
ber
of
norm
al cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(b)
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5x 10
11
Time, days
Num
ber
of
angio
genic
cells
Exact
Estimated
99% Bounds
(c)
0 20 40 60 80 100 120-1
0
1
2
3
4
5
6x 10
-4
Time, days
Mass o
f dru
g in t
he b
lood,
mg
Exact
Estimated
99% Bounds
(d)

-20 0 20 40 60 80 100 120 1400.5
1
1.5
2
2.5
3
3.5x 10
9
Time, days
Num
ber
of
tum
or
cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(a)
-20 0 20 40 60 80 100 120 1403
4
5
6
7
8
9
10
11
12
13x 10
12
Time, days
Num
ber
of
norm
al cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(b)
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5x 10
11
Time, days
Num
ber
of
angio
genic
cells
Exact
Estimated
99% Bounds
(c)
0 20 40 60 80 100 120-1
0
1
2
3
4
5
6x 10
-4
Time, days
Mass o
f dru
g in t
he b
lood,
mg
Exact
Estimated
99% Bounds
(d)

-20 0 20 40 60 80 100 120 1400.5
1
1.5
2
2.5
3
3.5x 10
9
Time, days
Num
ber
of
tum
or
cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(a)
-20 0 20 40 60 80 100 120 1403
4
5
6
7
8
9
10
11
12
13x 10
12
Time, days
Num
ber
of
norm
al cells
Exact
Measured
Estimated
99% Upper Bound
99% Lower Bound
Measurements used
(b)
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5x 10
11
Time, days
Num
ber
of
angio
genic
cells
Exact
Estimated
99% Bounds
(c)
0 20 40 60 80 100 120-1
0
1
2
3
4
5
6x 10
-4
Time, days
Mass o
f dru
g in t
he b
lood,
mg
Exact
Estimated
99% Bounds
(d)

0 20 40 60 80 100 1200.008
0.0085
0.009
0.0095
0.01
0.0105
0.011
0.0115
0.012
Time, days
r 1,
day
-1
Exact
Estimated
99% Bounds
(a)
0 20 40 60 80 100 1200.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25x 10
-3
Time, days
r 2,
day
-1
Exact
Estimated
99% Bounds
(b)
0 20 40 60 80 100 1200.85
0.9
0.95
1
1.05
1.1
1.15
1.2x 10
-3
Time, days
,
day
-1
Exact
Estimated
99% Bounds
(c)
0 20 40 60 80 100 12010.5
11
11.5
12
12.5
13
13.5
14
14.5
Time, days
,
day
-1
Exact
Estimated
99% Bounds
(d)

Hyperthermia Treatment of Cancer - Nanoparticles
Leonid A. Dombrovsky, Victoria Timchenko, Michael Jackson, Guan H. Yeoh, A combined transient thermal
model for laser hyperthermia of tumors with embedded gold nanoshells, International Journal of Heat and
Mass Transfer, Volume 54, Issues 25–26, December 2011, Pages 5459–5469
TEST-CASE

,
, ,, ,
0 , 0
p b p b b b met laser
T z t dT z tdz c z k z c z T T z t Q z Q z t
t dz dz
z d t
(1.a)
0, , 0 , 0T z t T z t (1.b)
0
,, , , 0
T z tk z hT z t hT z d t
z
(1.c)
0, , 0 , 0T z t T z d t (1.d)
with,
, ;laserQ z t z z t (1.e)
where, the subscript b refers to blood properties, b (s-1
) is the blood perfusion rate, Qmet (Wm-3
) is the heat generation resulting from metabolism, Qlaser (Wm
-3) is the heat source resulting from the laser absorption in
the tissues, (m-1
) is the absorption coefficient and (Wm-2) is the laser total fluence rate.
BIOHEAT TRANSFER EQUATION
TEST-CASE

a. COMPLETE MODEL FOR THE LASER FLUENCE RATE
Diffusion approximation in non-homogeneous medium on a fine mesh (Andre Maurente, Bernard Lamien, Helcio R. B. Orlande, Guillermo E. Eliçabe,
Analysis of the P1-approximation for the radiative heat transfer in skin tissues loaded
with nanoparticles, 22nd International Congress of Mechanical Engineering COBEM
2013, November 3-7, 2013, Ribeirão Preto, SP, Brazil)
b. REDUCED MODEL FOR THE FLUENCE RATE
Semi-infinite homogeneous medium on a coarse mesh (Welch, A.J., van Gemert M.J.C., Optical thermal response of laser irradiated tissue,
2nd Edition, Springer, 2011).
State Estimation problem with:
TEST-CASE

ESTIMATION WITH THE COMPLETE MODEL
(250 PARTICLES, LIU&WEST’S ALGORITHM)
TEST-CASE
0 0.5 1 1.5 2 2.5 3 3.5
37
37.5
38
38.5
39
39.5
40
40.5
41
41.5
42
z(mm)
T (o C
)
Estimadas
Exatas
99% Intervalo de Confiança, t=10 s
99% Intervalo de Confiança, t=25 s
t=10 s
t=25 s
Estimated
Exact
99% confidence interval, t=10s
99% confidence interval, t=25s

ESTIMATION WITH THE REDUCED MODEL
0 0.5 1 1.5 2 2.5 3 3.5
37
37.5
38
38.5
39
39.5
40
40.5
41
41.5
z(mm)
T (o
C)
Estimadas
Exatas
99% Intervalo de Confiança
t=5 s
Estimated with the reduced model
Exact
99% Confidence interval
TEST-CASE

Conventional Error Model
• State Evolution Model
• Observation Model
• Assuming the measurements errors Gaussian with zero mean and known
covariance matrix, the likelihood function is given as:
1 1, , , 1,...,k k k k k M x f x θ w
, , , 1,...,k k k k k M z g x θ v
11( | , ) exp [ , ] [ , ]
2
T
k k k k k k k k k
z x θ z g x θ W z g x θ
TEST-CASE

Approximation Error Model
• Let and be the reduced models associated to the more
accurate but computationally expensive models and
• Lets consider a linear operator, so that,
• We can write the state evolution-obsevation model as:
with,
with,
, ,r r r r
k k kf x θ w ,r r r
k kg x θ
, ,k k kf x θ w ,k kg x θ
xPr
k x kPx x
1, ,r r r r r r
k k k k k x f x θ w ω , , , ,r r r r r
k x k k k k k kP ω f x θ w f x θ w
,r r r r
k k k k k z g x θ υ v , ,r r r
k k k k x kP υ g x θ g x θ
TEST-CASE
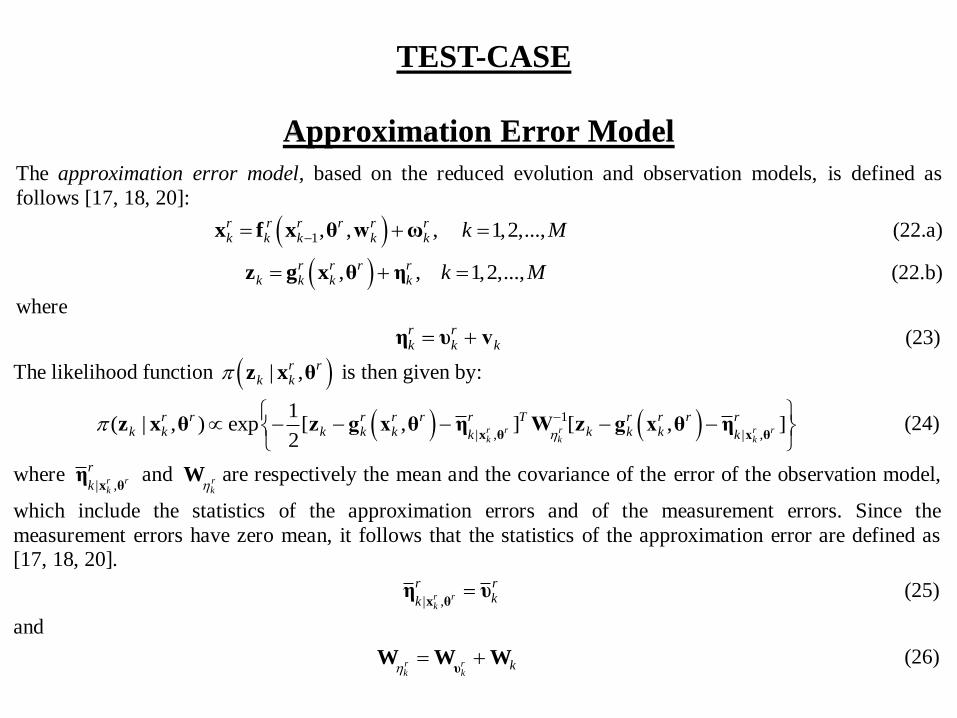
Approximation Error Model
The approximation error model, based on the reduced evolution and observation models, is defined as
follows [17, 18, 20]:
1, , , 1,2,...,r r r r r rk k k k k k M x f x θ w ω (22.a)
, , 1,2,...,r r r rk k k k k M z g x θ η (22.b)
where
r rk k k η υ v (23)
The likelihood function | ,r rk k z x θ is then given by:
1
| , | ,
1( | , ) exp [ , ] [ , ]
2r r r r rk k k
r r r r r r T r r r rk k k k k k k kk k
x θ x θ
z x θ z g x θ η W z g x θ η (24)
where | ,r r
k
r
k x θη and r
kW are respectively the mean and the covariance of the error of the observation model,
which include the statistics of the approximation errors and of the measurement errors. Since the
measurement errors have zero mean, it follows that the statistics of the approximation error are defined as [17, 18, 20].
| ,r r
k
r rkk
x θ
η υ (25)
and
r rk k
k
υW W W (26)
TEST-CASE

CONVERGENCE OF THE MODELING ERROR - Mean
0 0.5 1 1.5 2 2.5 3 3.5
-2
-1
0
1
2
3
z(mm)
e
rro (
oC
)
200 amostras
400 amostras
600 amostras
800 amostras
1000 amostras
1200 amostras
1400 amostras
1600 amostras
1800 amostras
2000 amostras
t=5 s
SAMPLES
TEST-CASE

CONVERGENCE OF THE MODELING ERROR
0 200 400 600 800 1000 1200 1400 1600 1800 20000.305
0.31
0.315
0.32
0.325
0.33
0.335
tot
Número de AmostrasNumber of Samples
Tra
ce o
f th
e C
ovariance M
atr
ix
t=5 s
TEST-CASE

ESTIMATED TEMPERATURE – PARTICLE FILTER
LIU&WEST’S ALGORITHM + AEM
TEST-CASE
0 0.5 1 1.5 2 2.5 3 3.5
37
38
39
40
41
42
z(mm)
T (
oC
)
Estimates
Exact
99% Confidence Interval, t=10 s
99% Confidence Interval, t=25 s
t=10 st=10 s
t=25 s

0 10 20 30 40 50 6036
37
38
39
40
41
42
43
44
t(s)
T (
oC
)
Exact
Estimates
Simulated Measurements
z = 0.36 mm
ESTIMATED TEMPERATURE – PARTICLE FILTER
LIU&WEST’S ALGORITHM + AEM
TEST-CASE

0 10 20 30 40 50 6037
37.5
38
38.5
39
39.5
40
40.5
41
41.5
t(s)
T (
oC
)
Exact
Estimates
Simulated Measurements
z = 1.49 mm
ESTIMATED TEMPERATURE – PARTICLE FILTER
LIU&WEST’S ALGORITHM + AEM
TEST-CASE

CONCLUSIONS
• Particle filter is the most general and robust technique for non-
linear models and/or non-Gaussian distributions.
• Even for large values of standard deviations in the evolution and
observation models, the estimated means are in excellent
agreement with the exact values of state variables and
model parameters.
• Although the state estimation problem was solved with a
reduced model over a coarse mesh and with a formulation
that neglects several physical aspects of the original
physical problem, the approximation error model was
capable of statistically taking into account the
discrepancies between the complete and reduced models,
thus resulting in accurate estimates of the transient
temperature fields.

ONGOING WORK
• 2D with axial symmetry with NIR Heating
• 3D with complex geometry (thyroid) with NIR Heating
• 3D with complex geometry (pancreas) with RF Heating
• Validation with experimental data obtained with phantoms
(Being developed in our Laboratory).

From left to right, phantoms made of: PVC-P, PVC-P and SiO2 nanoparticles
(3%wt) , PVC-P and thermal paste, PVC-P and TiO2 nanoparticles (0.7% wt)
Materials

Materials
Carbon Nanotubes – home-made
Diameter of 80 nm and length around 2 m
Concentration 0.1%wt
Single-Layer and Two-Layer phantoms
3.30 ± 0.03 mm
3.26 ± 0.06 mm
25.4 mm ±0.02
PVC-P
PVC-P with CNT

Experimental Setup
Laser diode was set to deliver a specified power on continuous wave mode through the collimator (mean wavelength of 829.1 nm).
An IR thermographic camera (FLIR, Thermacam SC660), placed at a distance of 40 cm above the phantom, measures the surface temperature
TC measurements at the non-heated surface

28.8
28.9
29
29.1
29.2
29.3
29.4
29.5
29.6
29.7
29.8
0 5 10 15 20 25 30 35 40 45 50
Tem
pera
ture
(ºC
)
Position (mm)
IR Irradiation - Start
900 mA
Li1
Li2
Li3
Li4
Li5
Temperature variations at the Carbon
Nanotube Phantom Surface – Two Layers

28.8
29
29.2
29.4
29.6
29.8
30
30.2
30.4
0 5 10 15 20 25 30 35 40 45
Tem
pera
ture
(ºC
)
Position (mm)
IR Irradiation - 20s
900 mA
Li1
Li2
Li3
Li4
Li5
Temperature variations at the Carbon
Nanotube Phantom Surface – Two Layers

28.5
29
29.5
30
30.5
31
31.5
0 5 10 15 20 25 30 35 40 45
Tem
pera
ture
(ºC
)
Position (mm)
IR Irradiation - 40s
900 mA
Li1
Li2
Li3
Li4
Li5
Temperature variations at the Carbon
Nanotube Phantom Surface – Two Layers

28.5
29
29.5
30
30.5
31
31.5
32
32.5
0 5 10 15 20 25 30 35 40 45
Tem
pera
ture
(ºC
)
Position (mm)
IR Irradiation - 60s
900 mA
Li1
Li2
Li3
Li4
Li5
Temperature variations at the Carbon
Nanotube Phantom Surface – Two Layers

Ackowledgements
The authors are thankful for the support provided by
CNPq, CAPES and FAPERJ, Brazilian agencies for the
fostering of science.

DEDICATION
57
HELCIO ORLANDE
11/12/1938 – 10/09/2012