analysis aug30 edit1
TRANSCRIPT

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 1/56
1
Analysis and Design of CognitiveRadio Networks
and Distributed Radio ResourceManagement Algorithms
James Neel
Aug 23-Sep 6, 2006
VIRGINIA POLYTECHNIC INSTITUTE & STATE UNIVERSITY
MOBILE & PORTABLE RADIO RESEARCH GROUP
MPRGVIRGINIA POLYTECHNIC INSTITUTE
AND STATE UNIVERSITY
TechVirginia
1 8 7 2

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 2/56
2
Presentation Schedule
August 23 Modeling Cognitive Radio
Networks
August 30 Model Based Analysis of
Cognitive Radio Networks September 6* Model Based Design of
Cognitive Radio Networks
(*) Formal Defense

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 3/56
3
Research in a nutshell
Hypothesis: Applying game theory and game models (potential andsupermodular) to the analysis of cognitive radio interactions – Provides a natural method for modeling cognitive radio interactions – Significantly speeds up and simplifies the analysis process (can be performed
at the undergraduate level – Senior EE) – Permits analysis without well defined decision processes (only the goals are
needed) – Can be supplemented with traditional analysis techniques – Can provides valuable insights into how to design cognitive radio decision
processes – Has wide applicability
Focus areas: – Formalizing connection between game theory and cognitive radio – Collecting relevant game model analytic results – Filling in the gaps in the models
Model identification (potential games) Convergence Stability
– Formalizing application methodology – Developing applications

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 4/56
4
Analyzing Cognitive Radio Networks
James Neel
August 30, 2006
VIRGINIA POLYTECHNIC INSTITUTE & STATE UNIVERSITY
MOBILE & PORTABLE RADIO RESEARCH GROUP
MPRGVIRGINIA POLYTECHNIC INSTITUTE
AND STATE UNIVERSITY
TechVirginia
1 8 7 2

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 5/56
5
Presentation Overview
Analysis Objectives
Analysis based on dynamical systems – Steady-states
– Optimality
– Convergence
– Noise/Stability
Analysis based on game models – Steady-states
– Optimality
– Convergence
– Noise/Stability
x
y

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 6/56
6
Analysis Objectives

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 7/567
Modeling Review
The interactions in a cognitiveradio network (levels 1-3) canbe represented by the tuple <N , A, {u i }, {d i },T>
A dynamical system model
adequately represents inner-loop procedural radios A myopic asynchronous
repeated game adequatelyrepresents ontological radiosand random procedural radios
– Suitable for outer-loopprocesses
– Not shown here, but can alsohandle inner-loop
Some differences in models – Most analysis carries over
– Some differences
Game Model
Dynamical System

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 8/568
1. Steady statecharacterization
2. Steady state optimality
3. Convergence4. Stability/Noise
5. Scalabilitya1
a2
NE1
NE2
NE3
a1
a2
NE1
NE2
NE3
a1
a2
NE1
NE2
NE3
a1
a2
NE1
NE2
NE3
a3
Steady State Characterization
Is it possible to predict behavior in the system?
How many different outcomes are possible?
Optimality
Are these outcomes desirable?
Do these outcomes maximize the system target parameter
Convergence
How do initial conditions impact the system steady state?
What processes will lead to steady state conditions?
How long does it take to reach the steady state?
Stability /Noise
How do system variations/noise impact the system?
Do the steady states change with small variations/noise?
Is convergence affected by system variations/noise?
Scalability
As the number of devices increases,
How is the system impacted?
Do previously optimal steady states remain optimal?
Analysis Objectives
(Radio 1’s available actions)
(Radio2’s
ava
ilableaction
s)
f o c u s
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 9/56
9
Dynamical Systems Analysis
x
y

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 10/5610
Steady-states
Recall model of <N , A,{d i },T > which we characterize
with the evolution function d Steady-state is a point where a*= d(a*) for all t ≥ t *
Obvious solution: solve for fixed points of d . For non-cooperative radios, if a* is a fixed point under
synchronous timing, then it is under the other threetimings.
Works well for convex action spaces
– Not always guaranteed to exist – Value of fixed point theorems
Not so well for finite spaces – Generally requires exhaustive search

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 11/56
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 12/56
12
Optimality
In general we assume the
existence of some design
objective function J :O→ℜ
The desirableness of anetwork state, o, is the
value of J (o).
In general maximizers of J
are unrelated to fixed points
of d .(shamelessly lifted from Matlab’s logo)
J

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 13/56
13
Showing convergence with nonlinear programming
(shamelessly lifted from Matlab’s logo)
J α
Left unanswered: where does α come from?

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 14/56
14
Stability
x
y
x
y
Stable, but not attractive
x
y
Attractive, but not stable

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 15/56
15
Lyapunov’s Direct Method
Left unanswered: where does L come from?

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 16/56
16
Analysis models appropriate for dynamical systems
Contraction Mappings – Identifiable unique steady-state – Everywhere convergent, bound for convergence
rate – Lyapunov stable (δ =ε )
Lyapunov function = distance to fixed point – General Convergence Theorem (Bertsekas)
provides convergence for asynchronous timing if contraction mapping under synchronous timing
Standard Interference Function – Forms a pseudo-contraction mapping – Can be applied beyond power control
Markov Chains (Ergodic and Absorbing) – Also useful in game analysis
O1
O2
O3
O4
O5
O6
O7
O8O9
O10
O1 1
O1 1
A(t0)
A(t 1)
A(t 2)
A(t 3)
A(t 4)
A(t 5)
A(t 6)
A(t 7)
A(t8)
A(t 8
)
A(t 9
)

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 17/56
17
Markov Chains
Describes adaptationsas probabilistictransitions betweennetwork states.
– d is nondeterministic Sources of
randomness: – Nondeterministic timing
– Noise
Frequently depicted asa weighted digraph or as a transition matrix

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 18/56
18
General Insights ([Stewart_94])
Probability of occupying a stateafter two iterations. – Form PP.
– Now entry pmn in the mth row and nth column of PP represents the
probability that system is in statean two iterations after being instate am.
Consider Pk . – Then entry pmn in the mth row and nth
column of represents theprobability that system is in statean two iterations after being instate am.

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 19/56
19
Steady-states of Markov chains
May be inaccurate to consider a Markovchain to have a fixed point – Actually ok for absorbing Markov chains
Stationary Distribution – A probability distribution such that π * such that
π *T P =π *T is said to be a stationary distributionfor the Markov chain defined by P.
Limiting distribution – Given initial distribution π
0 and transition matrixP, the limiting distribution is the distribution thatresults from evaluating
0lim T k
k π
→∞P

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 20/56
20
Ergodic Markov Chain
[Stewart_94] states that a Markov chain is ergodic if
it is a Markov chain if it is a) irreducible, b) positive
recurrent , and c) aperiodic .
Easier to identify rule: – For some k Pk has only nonzero entries
(Convergence, steady-state) If ergodic, then chain
has a unique limiting stationary distribution.

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 21/56
21
Absorbing Markov Chains
Absorbing state – Given a Markov chain with transition matrix P, a
state am is said to be an absorbing state if pmm=1.
Absorbing Markov Chain – A Markov chain is said to be an absorbing Markov
chain if it has at least one absorbing state and
from every state in the Markov chain there exists asequence of state transitions with nonzero probability
that leads to an absorbing state. These nonabsorbing
states are called transient states.
a0 a1
a
2 a3 a4 a5
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 22/56
22
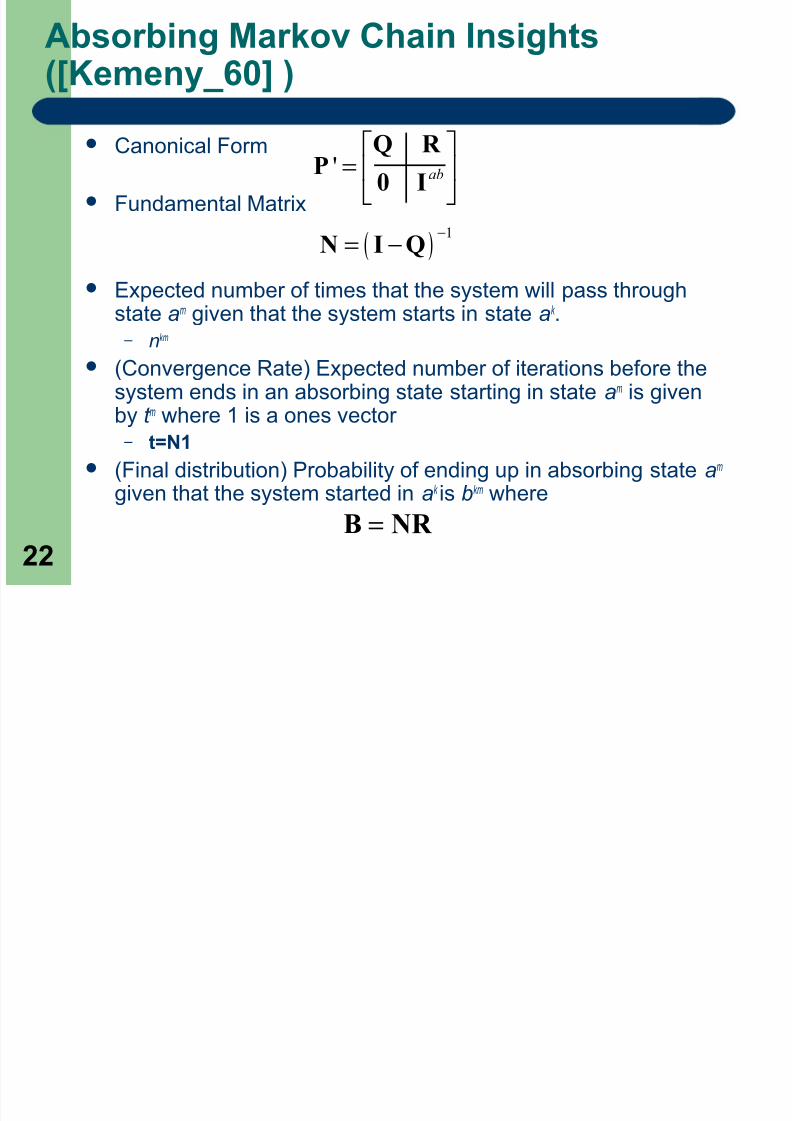
Absorbing Markov Chain Insights([Kemeny_60] )
Canonical Form
Fundamental Matrix
Expected number of times that the system will pass throughstate am given that the system starts in state ak . – nkm
(Convergence Rate) Expected number of iterations before thesystem ends in an absorbing state starting in state am is given
by t m where 1 is a ones vector – t=N1
(Final distribution) Probability of ending up in absorbing state am given that the system started in ak
is bkm where
' ab =
Q R P
0 I
( )1−= −N I Q
=B NR

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 23/56
23
Two-Channel DFS
( f 1, f 1) ( f 1, f 2)
( f 2, f 2)( f 2, f 1)
0.25
0.25
0.25
0.25
0.25
1
1 0.25
0.25
0.25
( f 1, f 1) ( f 1, f 2)
( f 2, f 2)( f 2, f 1)
0.25
0.25
0.25
0.25
0.25
1
1 0.25
0.25
0.25
0.250.250.250.25( f 2, f 2)
0100( f 2, f 1)
0010( f 1, f 2)
0.250.250.250.25( f 1, f 1)
( f 2, f 2)( f 2, f 1)( f 1, f 2)( f 1, f 1)
0.250.250.250.25( f 2, f 2)
0100( f 2, f 1)
0010( f 1, f 2)
0.250.250.250.25( f 1, f 1)
( f 2, f 2)( f 2, f 1)( f 1, f 2)( f 1, f 1)
P =
1.50.5( f 2, f 2)
0.51.5( f 1, f 1)
( f 2, f 2)( f 1, f 1)
1.50.5( f 2, f 2)
0.51.5( f 1, f 1)
( f 2, f 2)( f 1, f 1)
N =0.50.5( f 2, f 2)
0.50.5( f 1, f 1)
( f 2, f 1)( f 1, f 2)
0.50.5( f 2, f 2)
0.50.5( f 1, f 1)
( f 2, f 1)( f 1, f 2)
B =
( )1
1
j j
j
j j
f f u a
f f
−
−
≠= − =
( )
( )
( )
1
, \ 1
j j
j j j j j
f u a
d f f f F f u a−
=
= ∈ = −
Decision Rule
Goal
TimingRandom timer set to go off with probability
p=0.5 at each iteration

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 24/56
24
Procedural Radio Analysis Models

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 25/56
25
Model Steady States

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 26/56
26
Model Convergence

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 27/56
27
Model Stability

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 28/56
28
Using Game Theory to AnalyzeCognitive Radio Networks

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 29/56
29
Modeling Assumptions
Model of <N , A,{u i },{d
i },T >
Adaptations increase player’s goal
Asynchronous myopic repeated game model

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 30/56
30
Nash Equilibrium (Steady-state)
Friend
Foe
Friend Foe
500,500 0,1000
0,01000,0

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 31/56
31
Nash Equilibrium Identification
Exhaustive Search – Time to find all NE can be significant
– Only appropriate for finite action spaces
–
Not every game has an NE
P R S
S
R
P 0, 0
0, 0
0, 0
1, -1
1, -1
1, -1 -1, 1
-1, 1
-1, 1
Paper – Rock – Scissors

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 32/56
32
Nash Equilibrium as a Fixed Point
Best Response function
Synchronous Best Response
Nash Equilibrium as a fixed point
Fixed point theorems can be used toestablish existence of NE (see dissertation)
NE can be solved by implied system of
equations
( ) ( ) ( ){ }ˆ : , ,i i i i i i i i i i i B a b A u b a u a a a A− −= ∈ ≥ ∀ ∈
( ) ( )ˆ ˆii N B a B a∈= ×
( )* *ˆa B a=

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 33/56
33
Significance of NE for CRNs
Why not “if and only if”? – Consider a self-motivated game with a local maximum
and a hill-climbing algorithm. –
For many decision rules, NE do capture all fixed points(see dissertation) Identifies steady-states for all “intelligent” decision rules
with the same goal. Implies a mechanism for policy design while
accommodating differing implementations –
Verify goals result in desired performance – Verify radios act intelligently

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 34/56
34
Pareto efficiency (optimality)
Formal definition: An action vector a* is Pareto
efficient if there exists no other action vector a, such
that every radio’s valuation of the network is at least
as good and at least one radio assigns a higher
valuation Informal definition: An action tuple is Pareto
efficient if some radios must be hurt in order to
improve the payoff of other radios.
Important note – Like design objective function, unrelated to fixed points (NE)
– Inferior to evaluating design objective function (see
dissertation)
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 35/56
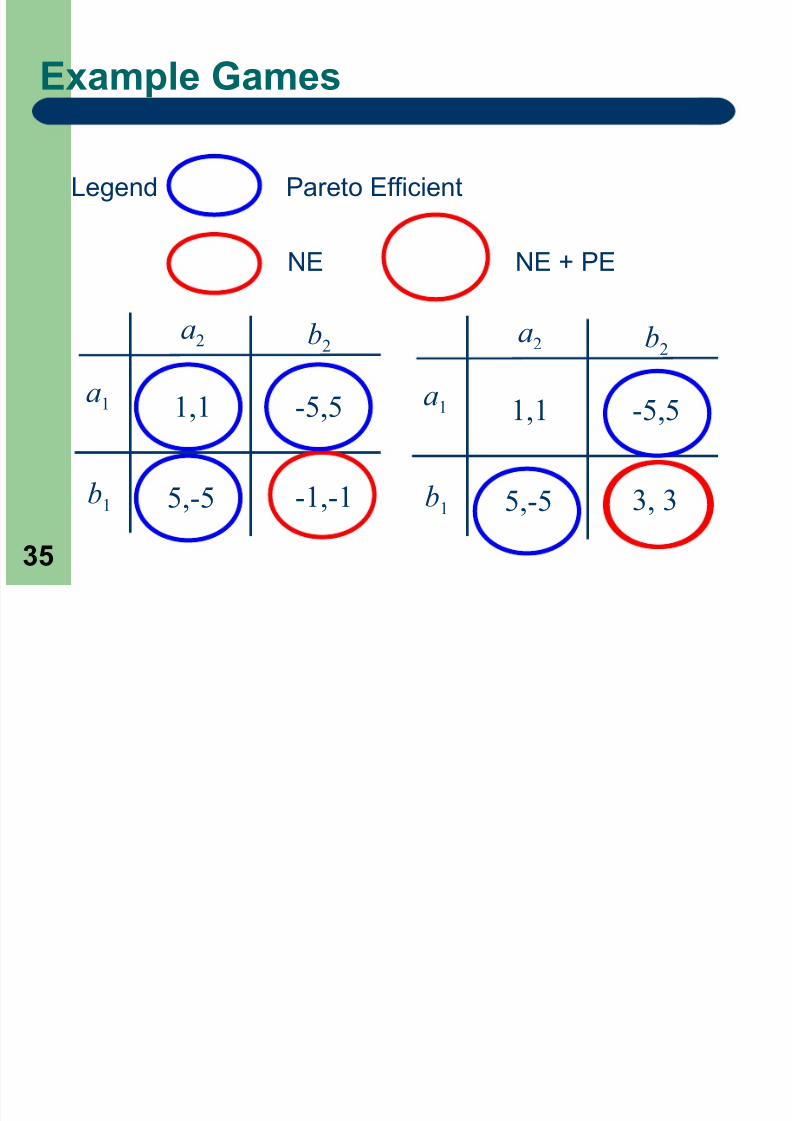
35
Example Games
a1
b1
a2 b2
1,1 -5,5
-1,-15,-5
a1
b1
a2 b2
1,1 -5,5
3, 35,-5
Legend Pareto Efficient
NE NE + PE

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 36/56
36
Paths and Convergence
Path [Monderer_96] – A path in Γ is a sequence γ = (a0, a1,…) such that for every
k ≥ 1 there exists a unique player such that the strategy
combinations (ak-1, ak ) differs in exactly one coordinate.
–
Equivalently, a path is a sequence of unilateral deviations.When discussing paths, we make use of the following
conventions.
– Each element of γ is called a step.
– a0 is referred to as the initial or starting point of γ .
– Assuming γ is finite with m steps, am
is called the terminal point or ending point of γ and say that γ has length m.
Cycle [Voorneveld_96] – A finite path γ = (a0, a1,…,ak ) where ak = a0

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 37/56
37
Improvement Paths
Improvement Path
– A path γ = (a0, a1,…) where for all k ≥ 1, u i (ak )>u
i (ak -
1) where i is the unique deviator at k
Improvement Cycle – An improvement path that is also a cycle
γ 2
γ 1
γ 3
γ 4γ 5γ 6γ 2
γ 1
γ 3
γ 4γ 5γ 6
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 38/56
38
Convergence Properties
Finite Improvement Property (FIP) – All improvement paths in a game are finite
Weak Finite Improvement Property (weak
FIP) – From every action tuple, there exists an
improvement path that terminates in an NE.
FIP implies weak FIP
FIP implies lack of improvement cycles
Weak FIP implies existence of an NE

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 39/56
39
Examples
a
b
A B
1,-1
-1,1
0,2
2,2
Game with FIP
a
b
A B
1,-1 -1,1
1,-1-1,1
C
0,2
1,2
c 2,12,0 2,2
Weak FIP but not FIP

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 40/56
40
Implications of FIP and weak FIP
Unless the game model of a CRN has weak FIP,then no autonomously rational decision rule can beguaranteed to converge from all initial states under random and round-robin timing (Theorem 4.10 indissertation).
If the game model of a CRN has FIP, then ALLautonomously rational decision rules are guaranteedto converge from all initial states under random andround-robin timing.
– And asynchronous timings, but not immediate fromdefinition
More insights possible by considering more refinedclasses of decision rules and timings

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 41/56
41
Decision Rules
Ab bi M k Ch i d

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 42/56
42
Absorbing Markov Chains andImprovement Paths
Sources of randomness – Timing (Random, Asynchronous) – Decision rule (random decision rule) – Corrupted observations (not assumed yet)
An NE is an absorbing state for autonomously
rational decision rules. Weak FIP implies that the game is an absorbing
Markov chain as long as the NE terminatingimprovement path always has a nonzero probabilityof being implemented.
This then allows us to characterize – convergence rate, – probability of ending up in a particular NE, – expected number of times a particular transient state will be
visited
Connecting Marko models

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 43/56
43
Connecting Markov models,improvement paths, and decision rules
Suppose we need the path γ = (a0, a1,…am) for convergence byweak FIP.
Must get right sequence of players and right sequence of adaptations.
Friedman Random Better Response
– Random or Asynchronous Every sequence of players have a chance to occur Random decision rule means that all improvements have a chance to
be chosen
– Synchronous not guaranteed
My random better response (chance of choosing same action) – Because of chance to choose same action, every sequence of
players can result from every decision timing.
– Because of random choice, every improvement path has a chanceof occurring

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 44/56
44
Convergence Results (Finite Games)
If a decision rule converges under round-robin, random, or synchronous timing, then it also converges under asynchronoustiming.
Random better responses converge for the most decision timingsand the most surveyed game conditions. – Implies that non-deterministic procedural cognitive radio
implementations are a good approach if you don’t know much aboutthe network.

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 45/56
45
Impact of Noise
Noise impacts the mapping from actions tooutcomes, f : A→O
Same action tuple can lead to different outcomes
Most noise encountered in wireless systems istheoretically unbounded.
Implies that every outcome has a nonzero chanceof being observed for a particular action tuple.
Some outcomes are more likely to be observedthan others (and some outcomes may have a verysmall chance of occurring)

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 46/56
46
DFS Example
Consider a radio observing the spectralenergy across the bands defined by the set C where each radio k is choosing its band of operation f k .
Noiseless observation of channel c k
Noisy observation If radio is attempting to minimize inband
interference, then noise can lead a radio tobelieve that a band has lower or higher
interference than it does
( ) ( ),i k ki k k k
k N
o c g p c f θ ∈
= ∑( ) ( ) ( ), ,i k ki k k k i k
k N
o c g p c f n c t θ
∈
= +∑%
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 47/56
47
Trembling Hand (“Noise” in Games)
Assumes players have a nonzero chance of making an error implementing their action. – Who has not accidentally handed over the wrong
amount of cash at a restaurant?
– Who has not accidentally written a “tpyo”?
Related to errors in observation as erroneous
observations cause errors in implementation
(from an outside observer’s perspective).

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 48/56
48
Noisy decision rules
Noisy utility ( ) ( ) ( ), ,i i iu a t u a n a t = +%
Trembling
Hand
Observation
Errors
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 49/56
49
Implications of noise
For random timing, [Friedman] shows game withnoisy random better response is an ergodic Markovchain.
Likewise other observation based noisy decisionrules are ergodic Markov chains
– Unbounded noise implies chance of adapting (or notadapting) to any action – If coupled with random, synchronous, or asynchronous
timings, then CRNs with corrupted observation can bemodeled as ergodic Makov chains.
– Not so for round-robin (violates aperiodicity)
Somewhat disappointing – No real steady-state (though unique limiting stationary
distribution)

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 50/56
50
DFS Example with three access points
3 access nodes, 3 channels, attempting to operate inband with least spectral energy.
Constant power
Link gain matrix
Noiseless observations
Random timing
12
3
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 51/56
51
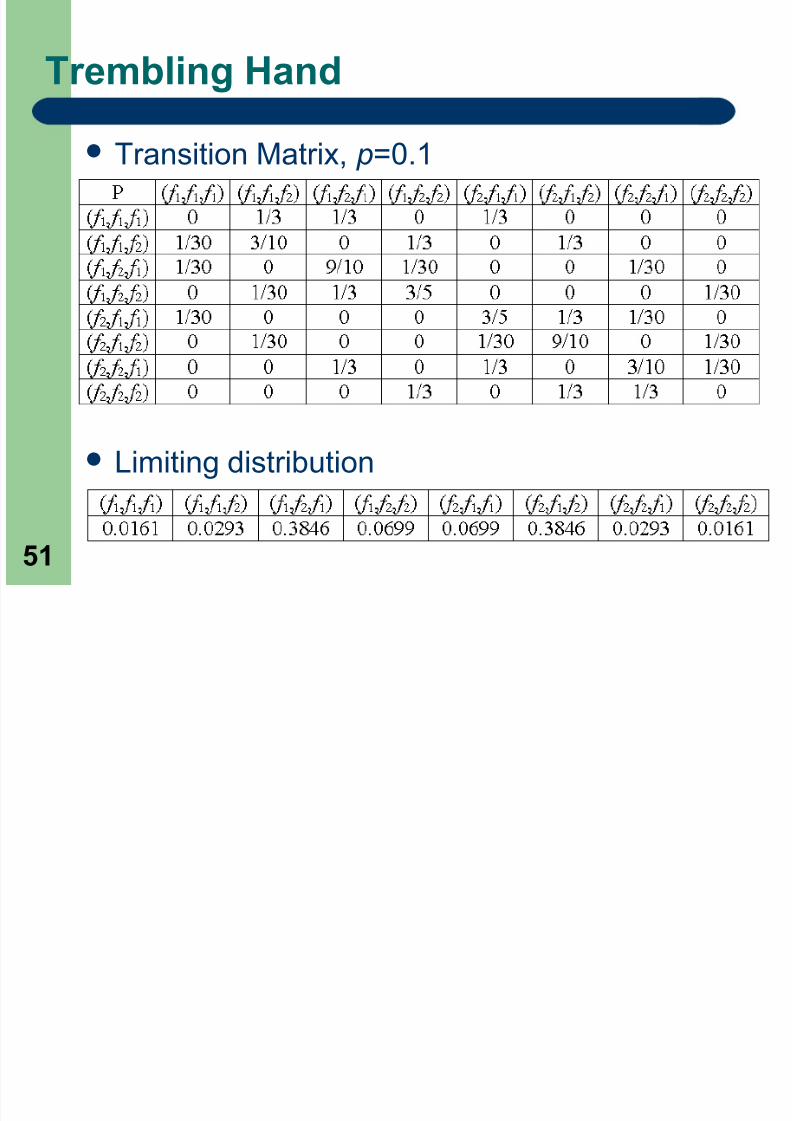
Trembling Hand
Transition Matrix, p=0.1
Limiting distribution

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 52/56
52
Noisy Best Response
Transition Matrix, (0,1) Gaussian Noise
Limiting stationary distributions
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 53/56
53
Comment on Noise and Observations
Cardinality of goals makes a difference for cognitiveradios – Probability of making an error is a function of the difference
in utilities – With ordinal preferences, utility functions are just useful
fictions Might as well assume a trembling hand
Unboundedness of noise implies that no state can beabsorbing
NE retains significant predictive power – While CRN is an ergodic Markov chain, NE (and the
adjacent states) remain most likely states to visit – Stronger prediction with less noise – Also stronger when network has a Lyapunov function – Exception - elusive equilibria ([Hicks_04])

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 54/56
54
Summary
Skipped over a lot of stuff in the dissertation Given a set of goals, an NE is a fixed point for all radios with
those goals for all autonomously rational decision processes Traditional engineering analysis techniques can be applied in a
game theoretic setting
– Markov chains to improvement paths Network must have weak FIP for autonomously rational radios
to converge – Weak FIP implies existence of absorbing Markov chain for many
decision rules/timings
In practical system, network has a theoretically nonzero chanceof visiting every possible state (ergodicity), but does haveunique limiting stationary distribution – Specific distribution function of decision rules, goals
8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 55/56
55
Shortcomings
Steady-states – Need not be optimal
Could enforce desired equilibria Doesn’t generally scale well
– Identification in finite games is painful Game convergence
– Only looked at finite games – Arguably all DSP controlled radios have a finite action space, but
to a casual observer, action space may appear infinite – How to identify when a game has FIP/weak FIP without exhaustive
search? – Would like to be able to apply Zangwill’s for infinite action spaces
Noise/Stability – Characterizing state distribution not exactly the same as stability – Where do the functions for applying Zangwill’s Theorem and
Lyapunov’s Direct Method come from? Solution: potential games and the interference reducing
network design framework (next week)

8/6/2019 Analysis Aug30 Edit1
http://slidepdf.com/reader/full/analysis-aug30-edit1 56/56
Questions?