andrew schaefer ewo seminar october 26, 2006egon.cheme.cmu.edu/ewo/docs/schaefermdp.pdf(the markov...
TRANSCRIPT
1
Markov Decision Processes
Andrew SchaeferEWO Seminar
October 26, 2006

2
What are Markov Decision Processes (MDPs)?
MDPs are a method for formulating and solving stochastic and dynamic decisionsMDPs are very flexible, which is an advantage from a modeling perspective but a drawback from a solution viewpoint (can’t take advantage of special structure)MDPs are pervasive; every Fortune 500 company uses them in some form or anotherParticular success in inventory management and reliability
3
Potential for MDPs in EWOThe flexibility of MDPs may allow them to be useful for certain problems
It is unlikely that they can work as stand-alone techniques
Long history of successful applications
4
OutlineBasic Components of MDPs
Solution Techniques
Extensions
Big Picture – Potential Roles for MDPs
5
Outline – Basic ComponentsInventory Example
MDP Vocabulary5 Basic Components1. decision epochs2. states3. actions4. rewards5. transition probabilitiesvalue functiondecision rulepolicy
6
Inventory ExampleProblem Statement
Each month, the manager of a warehouse
observes current inventory on hand of a single productdecides how much additional stock to order from a supplier
Monthly demand uncertainprobability distribution is known
Tradeoff between costs ofkeeping inventory lost sales
Objective maximize expected profit over the next year
Simplifying AssumptionsInstantaneous deliveryNo backlogging, i.e. excess demand is lostWarehouse capacity of M unitsProduct is sold in whole units onlyRevenues, costs and demand distribution do not change from month to month
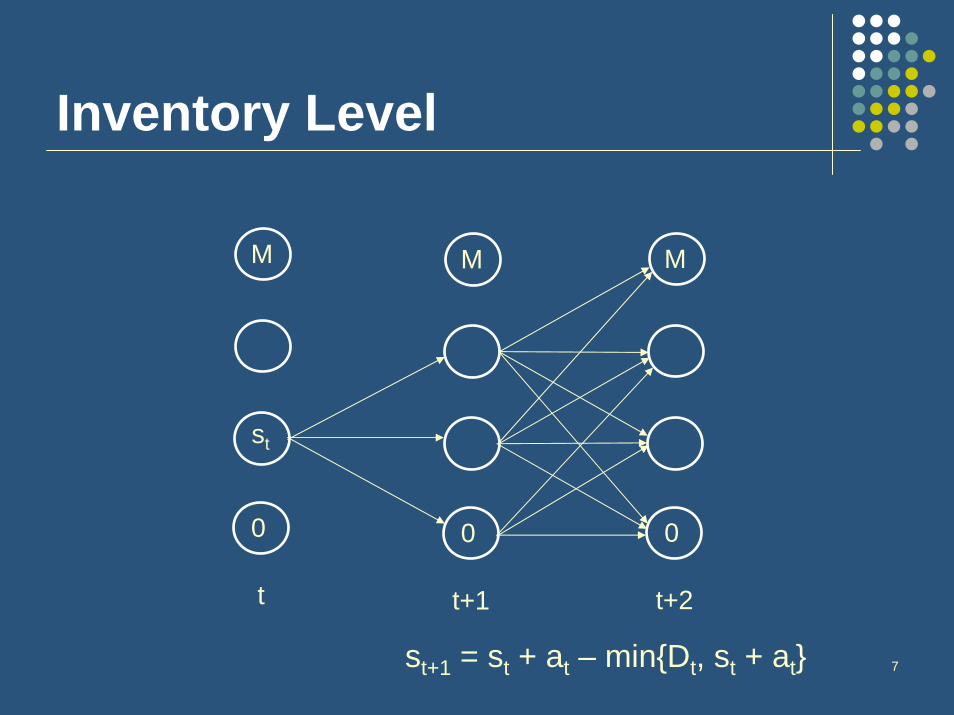
7st+1 = st + at – min{Dt, st + at}
t
M
st
0
Inventory Level
t+1
M
0
t+2
M
0

8
Outline – Basic ComponentsInventory Example
MDP Vocabulary5 Basic Components1. decision epochs2. states3. actions4. rewards5. transition probabilitiesvalue functiondecision rulepolicy

9
1. Decision Epochs: tPoints in time at which decisions are made
analogous to period start times in a “Markov Process”
Inventory examplefirst day of month 1, first day of month 2, …, first day of month 12
In general: 1, 2, …, NN: length of the time horizon (could be infinite)
Also calledperiodsstages
10
2. States: st
Relevant information needed to describe the systemanalogous to states in “Markov Processes”includes all information from the past relevant to the future
Inventory exampleamount of inventory on hand at the start of the month
st, t = 1, …, 12possible values – state space
0, 1, 2, …, M
11
3. Actions: at
Means by which the decision maker interacts with the system
permissible actions can be state dependentno exact analogy to “Markov Processes”
the decision is usually modeled outside the Markov Process
Inventory examplehow much additional stock to order each monthdenoted
at, t = 1, …, 12possible values
0, 1, 2, …, M - st
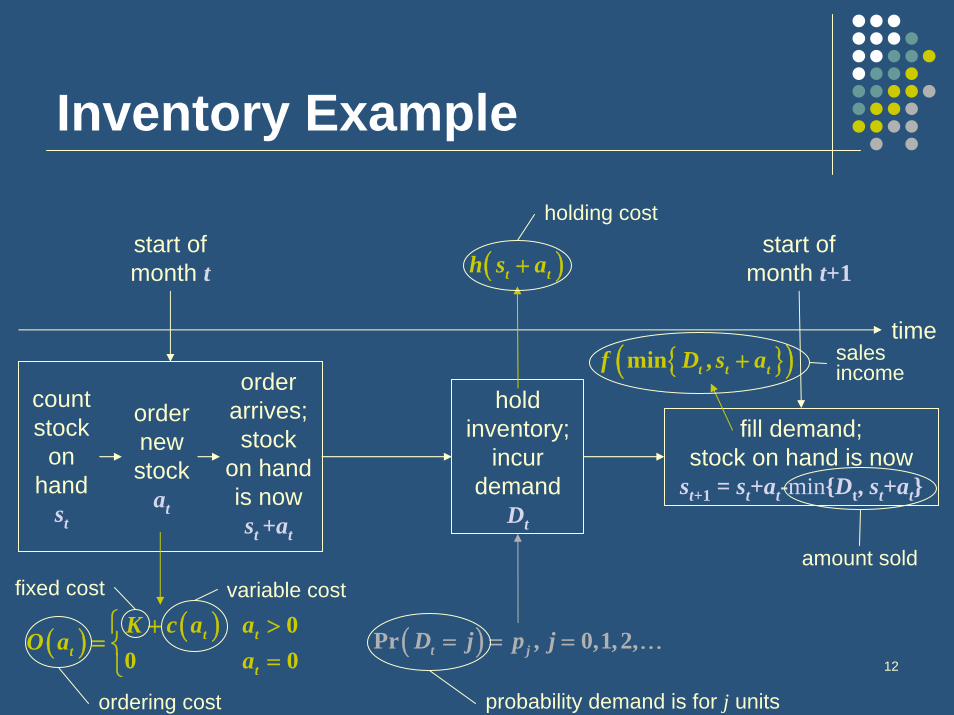
12
Inventory Example
start of month t
start of month t+1
count stock
on hand
st
order new stock
at
order arrives; stock
on hand is now st +at
fill demand; stock on hand is now
st+1 = st+at-min{Dt, st+at}
hold inventory;
incur demand
Dt
( ) ( ) 00 0
t tt
t
K c a aO a
a⎧ + >
= ⎨=⎩
time
( )t th s a+
( )Pr , 0,1,2,t jD j p j= = = …
{ }( )min ,t t tf D s a+
variable costfixed cost
ordering cost probability demand is for j units
holding cost
sales income
amount sold

13
4. Rewards: rt(st,at)Expected immediate net income associated with taking a particular action, in a particular state, in a particular epoch
analogous to state utilities in “Markov Processes”
Inventory exampleexpected income – order cost – holding cost
in the last epoch, we assume that whatever is left over has somesalvage value, g(.)
( ) ( ) ( ), E[income in month ] , 1,2, ,12t t t t t tr s a t O a h s a t= − − + = …{ } { }
( ) ( )0 1
E[income in ] E[income in | ]Pr E[income in | ]Prt t
t t
t t t t t t t t t t t ts a
j t t jj j s a
t t D s a D s a t D s a D s a
f j p f s a p+ ∞
= = + +
= ≤ + ≤ + + > + > +
= + +∑ ∑
( ) ( )13 13 13,r s g s⋅ = ( ) ( )111 , +++ =⋅ NNN sgsrin general

14
5. Transition Probabilities:pt(st,at)Distribution that governs how the state of the process changes as actions are taken over time
depends on current state and action only, and possibly timethat is, the future is independent of the past given the present(The Markov Property)
Inventory examplewe already established that st+1 = st+at-min{Dt, st+at}
can’t end up with more than you started with
end up with some leftovers if demand is less than inventoryend up with nothing if demand exceeds inventory
0ii s a
p j∞
= +
⎪⎪ =⎨⎪⎪
∑{ }1Pr | ,t t ts j s s a a+ = = = =
depends on demand0 j s a⎪ > +⎩
s a jp j s a+ − ≤ +⎧⎪
15
Value FunctionCollectively, decision epochs, states, actions, rewards, and transition probabilities form an MDP.
But how do they fit together?
Value function, vt(st)maximum total expected reward starting in state st with N-tdecision epochs remainingvt(st) = maxa{rt(st,at) + E vt+1(st+1)}
rt(st,at): expected immediate reward in period tE vt+1(st+1): expected remaining reward in periods t + 1, t + 2,…N

16
Value FunctionInventory example
( ) ( ) ( )
( ){ }
( ) ( ) { }
( ){ }
( ) ( ) { }
12 12
11 11
13 13 13 13 13
12 12 12 12 12 13 13 12 120,1, , 0
11 11 11 11 11 12 12 11 110,1, , 0
,
max , Pr | ,
max , Pr | ,
M
a M s j
M
a M s j
v s r s g s
v s r s a v j s j s a
v s r s a v j s j s a
∈ − =
∈ − =
= ⋅ =
⎧ ⎫= + =⎨ ⎬
⎩ ⎭⎧ ⎫
= + =⎨ ⎬⎩ ⎭
∑
∑
…
…
expected remaining reward in periods (2,…,N)
expected immediate reward period 1
( ){ }
( ) ( ) { }1 1
1 1 1 1 1 2 2 1 10,1, , 0max , Pr | ,
M
a M s jv s r s a v j s j s a
∈ − =
⎧ ⎫= + =⎨ ⎬
⎩ ⎭∑…
( ){ }
( ) ( ) { }2 2
2 2 2 2 2 3 3 2 20,1, , 0max , Pr | ,
a M s jv s r s a v j s j s a
∈ − =
= + =…
M⎧ ⎫⎨ ⎬⎩ ⎭
∑maximum total expected
reward starting in
state s1 with 12 decision
epochs remaining
17
Decision RuleA rule, for a particular state, that prescribes an action for each decision epoch
dt(s) = action to take in state s in decision epoch t
Inventory example - possible decision rulesd1(0) = 5 : if there are 0 items on hand at the beginning of month 1, order 5.d2(1) = 3 :if there is 1 item on hand at the beginning of month 2, order 3.
18
PolicyA collection of decision rules for all states
Inventory example
Under a fixed policy, the process behaves according to a Markov chain.
1 2 12
1 2 12
1 2 12
(0) (0) (0) 5 4 1(1) (1) (1) 4 3 0
( ) ( ) ( ) 0 0 0
d d dd d d
d M d M d M
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦
… ………… ………
… ………
19
Outline – Solution TechniquesFinite-horizon MDPs
Backwards induction solution technique
Infinite-horizon MDPsOptimality criteriaSolution techniques
value iterationpolicy iterationlinear programming

20
Various factors to consider in choosing the right technique
Will rewards be discounted?What is the objective?
Maximize expected total reward, orMaximize expected average reward
Is the problem formulated as a finite or infinite horizon problem?
If finite horizon, solution technique does not depend on discounting or objectiveFor infinite horizon, technique does depend on discounting and objective
21
Outline – Solution TechniquesFinite-horizon MDPs
Backwards induction solution technique
Infinite-horizon MDPsOptimality criteriaSolution techniques
value iterationpolicy iterationlinear programming
22
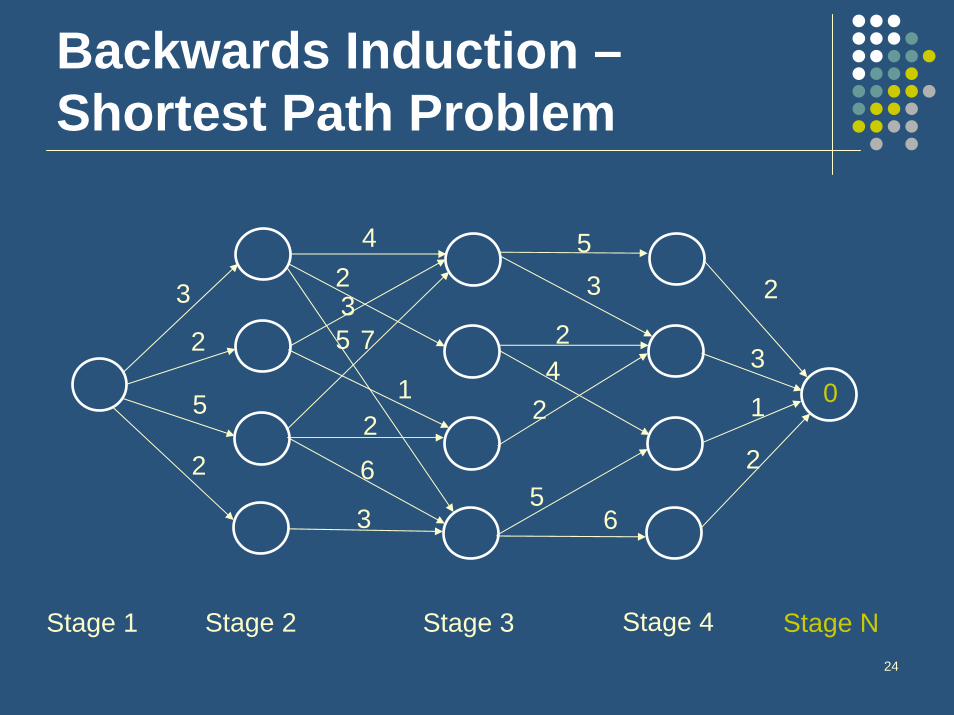
Finite horizon problemsWe want to find a policy, , that maximizes:
The solution technique used is called “backwards induction”
⎭⎬⎫
⎩⎨⎧
Ε= ∑=
N
ttts asrsv
1, ),()( ππ
π
23
Stage 2
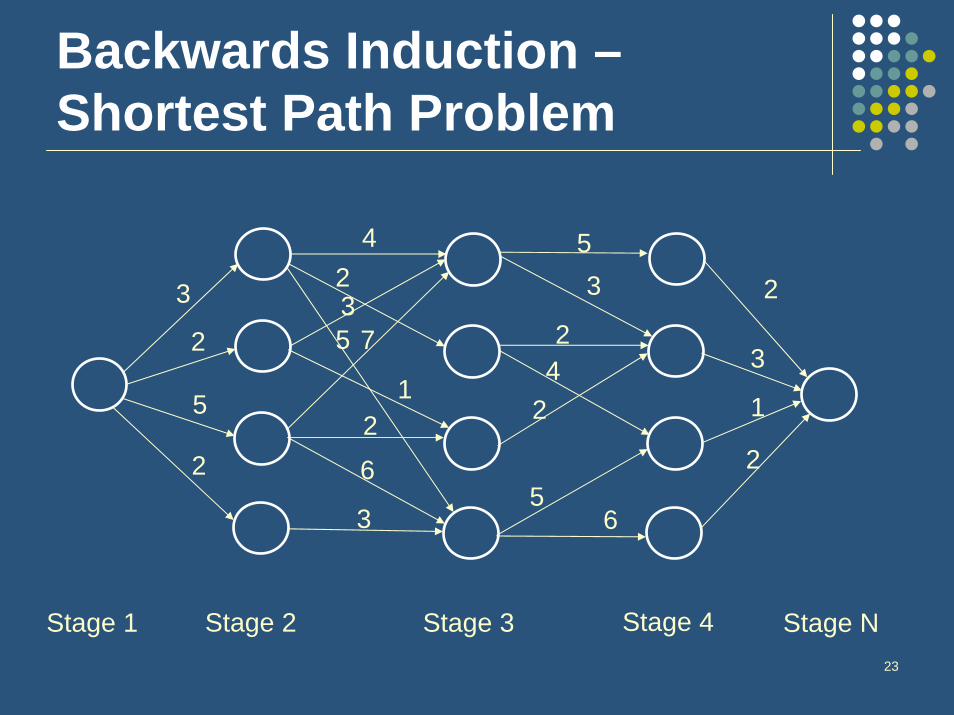
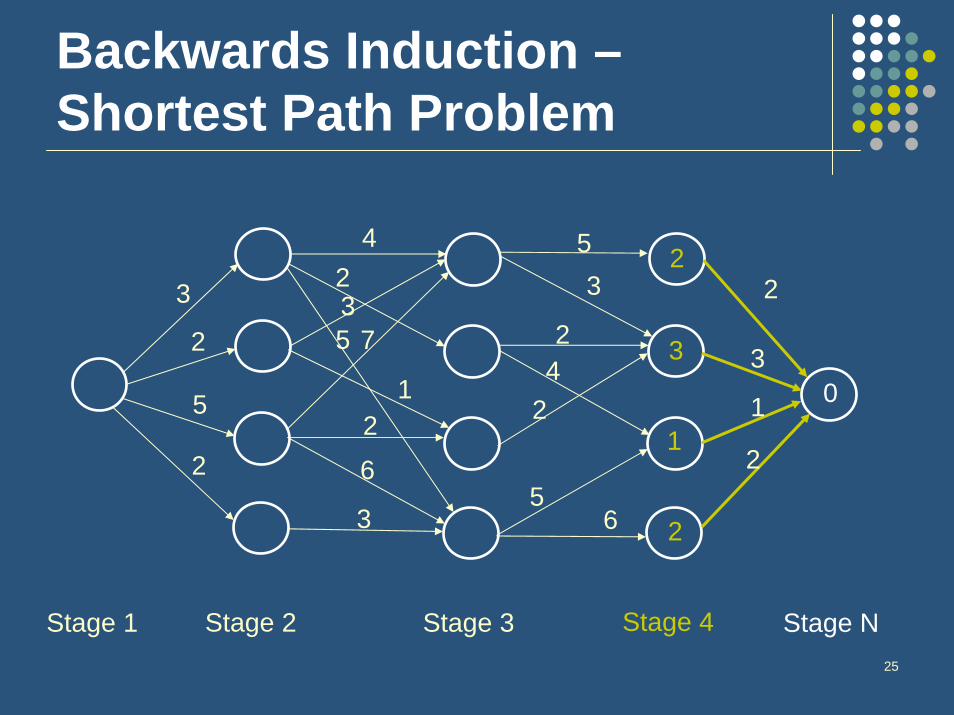
Backwards Induction –Shortest Path Problem
Stage 3 Stage 4Stage 1 Stage N
3
2
5
2
42
735
21
6
3
2
3
1
2
42
2
53
56
24
Stage 2
Backwards Induction –Shortest Path Problem
Stage 3 Stage 4Stage 1 Stage N
3
2
5
2
42
735
21
6
3
2
3
1
2
42
2
53
56
0
25
Stage 2
Backwards Induction –Shortest Path Problem
Stage 3 Stage 4Stage 1 Stage N
3
2
5
2
42
735
21
6
3
2
3
1
2
42
2
53
56
0
2
3
1
2

26
Stage 2
Backwards Induction –Shortest Path Problem
Stage 3 Stage N-1Stage 1 Stage N
3
2
5
2
42
735
21
6
3
2
3
1
2
42
2
53
56
0
2
3
1
2
6
5
5
6
27
Idea behind backwards inductionEnvision being in the last time period for all the possible states and decide the best action for those states
This yields an optimal value for that state in that period
Next envision being in the next-to-last period for all the possible states and decide the best action for those states, given you now know the optimal values of being in various states at the next time period
Continue this process until you reach the present time period
28
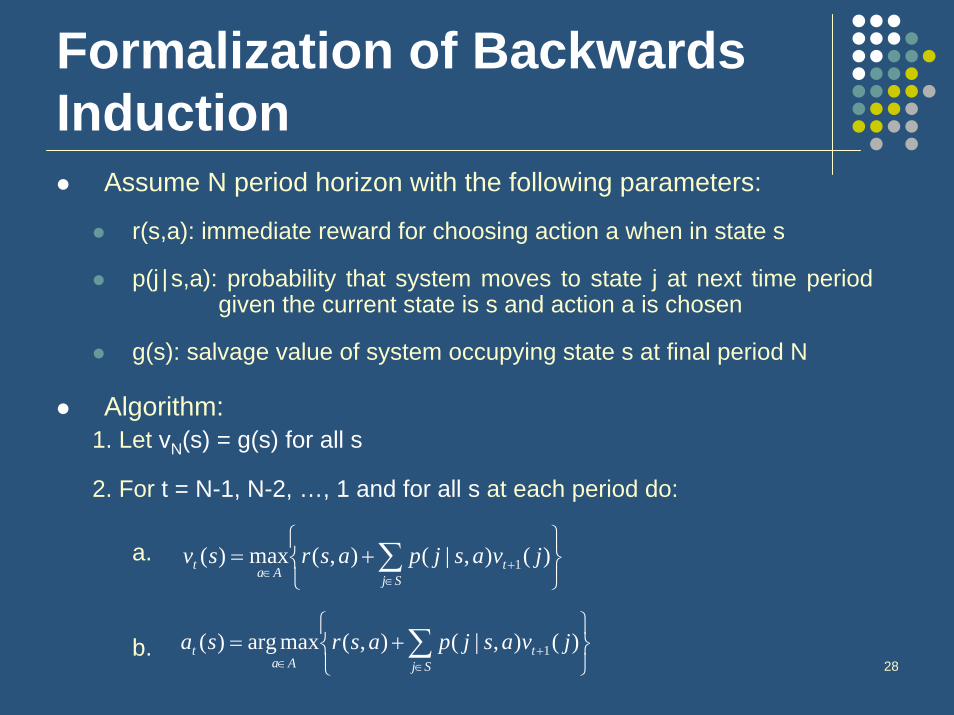
Formalization of Backwards Induction
Assume N period horizon with the following parameters:
r(s,a): immediate reward for choosing action a when in state s
p(j | s,a): probability that system moves to state j at next time period given the current state is s and action a is chosen
g(s): salvage value of system occupying state s at final period N
Algorithm:1. Let vN(s) = g(s) for all s
2. For t = N-1, N-2, …, 1 and for all s at each period do:
a.
b.
⎭⎬⎫
⎩⎨⎧
+= ∑∈
+∈ SjtAat jvasjpasrsv )(),|(),(max)( 1
⎭⎬⎫
⎩⎨⎧
+= ∑∈
+∈ Sj
tAa
t jvasjpasrsa )(),|(),(maxarg)( 1
29
Infinite Horizon ProblemsThe infinite horizon case is the limiting value of the finite case as the time horizon tends toward infinity
Recall the finite horizon value function:
This is the infinite horizon value function:
This is the infinite horizon value function with discounting:
⎭⎬⎫
⎩⎨⎧
Ε= ∑=
N
ttts asrsv
1, ),()( ππ
⎭⎬⎫
⎩⎨⎧
Ε= ∑=
∞→
N
tttsN
asrsv1
, ),(lim)( ππ
⎭⎬⎫
⎩⎨⎧
Ε= ∑=
−
∞→
N
ttt
tsN
asrsv1
1, ),(lim)( λππ
30
Important Factors for Infinite Horizon Models
Discount factorIf we have a discount factor < 1, then total expected value converges to a finite solutionIf there is no discounting, then total expected value may explode
However, if the system has an absorbing state with 0 reward, then even these may yield finite optimal values
Objective criteriaTotal expected valueAverage expected value over the long run
More detailed analyses is required
When is a stationary optimal policy guaranteed to exist?If the state space and action space are finite

31
Previous applications of MDPsAt the heart of every inventory management paper is an MDP
Reliability and replacement problems
Some routing and logistics problems (e.g. Warren Powell’s work in trucking)
50 years of successful applications (particularly inventory theory, which is widely applied)

32
Limitations of MDPs“Curse of dimensionality”
As the problem size increases, i.e. the state and/or action space become larger, it becomes computationally very difficult to solve the MDPsThere are some methods that are more memory-efficient than Policy Iteration and Value Iteration algorithmsThere are also some solution techniques that find near-optimal solutions in a short time
Enormous data requirementsFor each action and state pair, we need a transition probabilitymatrix and a reward function
33
Limitations of MDPsStationarity assumption
In fact, transition probabilities may not stay the same over timeTwo methods to model non-stationary transition probabilities and rewards1. Use a finite-horizon model2. Enlarge the state space by including time
34
Why do MDPs not Scale Well?Analogy in the deterministic world: DP vs. IPAny integer program can be formulated as a dynamic programHowever, DPs struggle with IPs that take branch-and-bound less than a secondWhy?
IP uses polyhedral theory to get strong boundsDP techniques grow with the size of the problem
Will this occur in the stochastic setting?
35
MDP: Approximate Solution Techniques
Finding the optimal policy is polynomial time in the state space size
Linear programming formulationSometimes too many states for this to be practical
Examples of approximate solution techniquesState aggregation and action eliminationMany AI techniques (reinforcement learning)Approximate linear programming (de Farias and van Roy)In the last 10 years this has become a very active area

36
Extensions of MDPsThus far, we’ve discussed discrete-time MDP, i.e. the decisions are made at certain time periods
Continuous time MDP models generalize MDPs byallowing the decision maker to choose actions whenever the system changesmodeling the system evolution in continuous timeallowing the time spent in a particular state to follow an arbitrary probability distribution
No one has considered a continuous time stochastic program
37
Extensions of MDPsMost models are completely observable MDPs, i.e. the state of the system is known with certainty at all time periods
Partially observable MDP models generalize MDPs by relaxing the assumption that the state of the system is completely observable

38
Partially Observable MDPs(POMDPs)
System state is not fully observable.Decision maker receives a signal o which is related to the system state by q(o|s)
Observation process, depends on the (unknown) state, generated from a probability distribution function
Hidden variables form a standard MDP
ApplicationsMedical diagnosis and treatmentEquipment repair

39
POMDPs- Formal DefinitionPOMDPs consist of
State space SAction space AObservation space OTransition matrix PRewards RObservation process distribution Q(o | s)Value function V = V(y; π)
Where π: O A is a policy
40
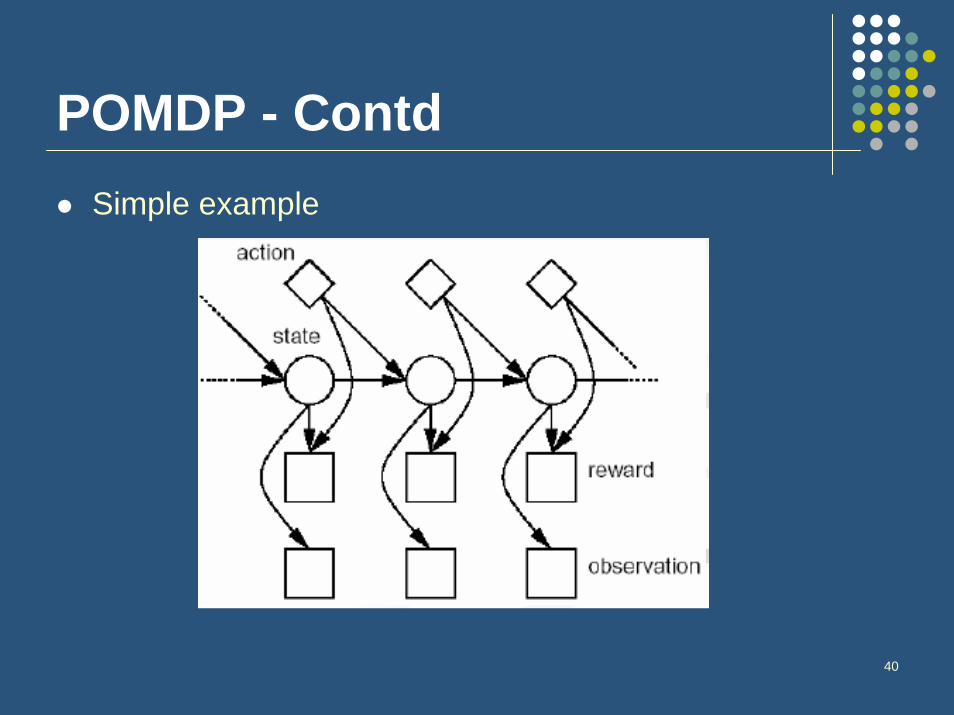
POMDP - ContdSimple example

41
POMDP controlled by parameterized stochastic policy
Dynamics of POMDP controlled by parameterized stochastic policies:
42
Constrained Markov Decision Process
MDPs with probabilistic constraintsTypically linear in terms of the limiting probability variables
ApplicationsService level constraints in call centers
P(No delay) >= 0.5E[Number in queue] <= 10
Value iteration and Policy iteration algorithms do not extend. Linear Programming does.
43
CMDP: LP techniqueCan model constraint as a function of the variables
Results in the optimal randomized policyOptimal choice of action in some states can be randomizedNot practicalDifficult to obtain the actual randomization probabilities
Why randomized?Vertices of LP polytope without constraints correspond to non-randomized policiesConstraints create new vertices corresponding to randomized policies

44
Competitive MDPsTwo (or more) players compete
The actions of one player affects the state of the other
May be interesting for modeling various oligopolisticrelationships among competitors
Still a nascent area
45
Why would I prefer an MDP to a Stochastic Program?
MDPs are much more flexible – existing multistage SP models assume linear relations across stages If there is a recursive nature to the problem, MDPs are likely superiorWhen the number of states/actions is small relative to the time horizon (e.g. inventory management) MDPs are likely to be superiorThe MDP may be easier to analyze analytically; e.g. the optimality of (s,S) policies in inventory theory
46
Why would I prefer a Stochastic Program to an MDP?
When the action and/or state space has a (good) polyhedral representationWhen the set of decisions and/or states is enormous, or infiniteWhen the number of stages is not critical relative to the detail required in each stage
47
ConclusionsMDPs are a flexible technique for stochastic and dynamic optimization problemsMDPs have a much longer history of success than stochastic programmingCurse of dimensionality may render them impractical (e.g. for a VRP, action space is set of TSP tours)Approximate solution techniques appear promisingAllow models that are unexplored in SP
Partial observabilityContinuous timeCompetition